Część I
Podstawy
11
Rozdział 1
Próbkowe odpowiedniki wielkości
populacyjnych
1.1
Rozkład empiryczny
Statystyka matematyczna opiera się na założeniu, że dane są wynikiem pewnego „doświadczenia losowego”. Przypuśćmy, że dane mają postać ciągu liczb x1 , x2 , . . . , xn . Zakładamy, że
mamy do czynienia ze zmiennymi losowymi X1 , X2 , . . . , Xn określonymi na przestrzeni probabilistycznej (Ω, F, P) i dane są realizacjami (wartościami) tych zmiennych losowych, czyli
x1 = X1 (ω), . . . , xn = Xn (ω) dla pewnego ω ∈ Ω. Nie znamy rozkładu prawdopodobieństwa
P na przestrzeni Ω, który „rządzi” zachowaniem zmiennych losowych i chcemy się dowiedzieć
czegoś o tym rozkładzie na podstawie obserwacji x1 , x2 , . . . , xn . Rozważmy najpierw prostą
sytuację, kiedy obserwacje są realizacjami niezależnych zmiennych losowych o jednakowym
rozkładzie.
1.1.1 DEFINICJA. Próbką z rozkładu prawdopodobieństwa o dystrybuancie F nazywamy
ciąg niezależnych zmiennych losowych X1 , X2 , . . . , Xn o jednakowym rozkładzie, P(Xi 6 x) =
F (x) dla i = 1, 2, . . . , n. Będziemy używali oznaczenia
X1 , X2 , . . . , Xn ∼iid F.
W powyższej definicji dystrybuanta jest tylko pewnym sposobem opisu rozkładu prawdopodobieństwa. Mówiąc na przykład o próbce z rozkładu normalnego, napiszemy X1 , . . . Xn ∼iid
N(µ, σ 2 ). Mówi się także, że X1 , X2 , . . . , Xn jest próbką z rozkładu fikcyjnej zmiennej losowej
X ∼ F.
Uwaga. W statystycznych badaniach reprezentacyjnych stosuje się różne schematy losowania z populacji skończonej. W Definicji 1.1.1 żądamy niezależności, zatem ta definicja nie
obejmuje próbki wylosowanej bez zwracania.
13
14
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
1.1.2 DEFINICJA. Niech X1 , X1 , . . . , Xn będzie próbką z rozkładu o dystrybuancie F .
Funkcję
n
1X
1(Xi 6 x)
F̂ (x) =
n i=1
nazywamy dystrybuantą empiryczną.
Gdy chcemy podkreślić, że próbka ma rozmiar n, to piszemy F̂n zamiast F̂ . Traktujemy F̂
jako „empiryczny odpowiednik” nieznanej dystrybuanty F .
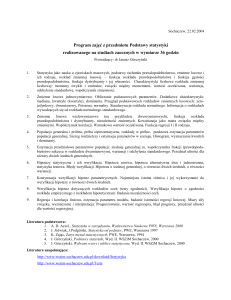
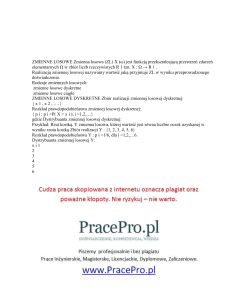
1.1.3 Przykład (Waga noworodków). Powiedzmy, że wylosowano 114 noworodków1 w celu
poznania cech fizycznych dzieci urodzonych w Warszawie w roku 2009. Waga noworodków
była taka:
3080
3720
3280
2620
3310
3460
3200
3760
2900
3730
2470
2400
3650
3520
3960
3690
3770
3800
3530
3640
3750
3640
3620
2500
3250
3200
3300
3200
2580
3394
3330
2780
4010
3420
2740
2540
4000
3700
2490
3070
2700
3640
2680
2760
3230
4330
3800
3270
3180
3500
3260
4640
3740
2680
2700
3480
2570
3790
3440
3480
3790
3780
3760
2700
3490
3580
2420
3480
3120
3160
4140
3900
3600
3190
3760
3000
2500
2110
3340
3890
3620
3930
3760
3060
3180
3960
2900
2660
2930
3420
3070
3190
3950
3740
2850
3760
2800
4320
3600
3160
3330
3270
2380
2700
3200
3490
3670
3500
3450
3114
3012
2030
2750
3100
Dane traktujemy jako próbkę z rozkładu prawdopodobieństwa zmiennej losowej X = „waga
noworodka losowo wybranego z populacji”. Rysunek 1.1 przedstawia dystrybuantę empiryczną F̂ odpowiadającą tej próbce.
♦
Dystrybuanta empiryczna jest funkcją pary argumentów (x, ω), czyli F̂ : R × Ω → [0, 1],
ale wygodnie jest pomijać argument ω. Dla ustalonego ω ∈ Ω dystrybuanta
empiryczna
P
jest funkcją R → [0, 1], która argumentowi x przyporządkowuje liczbę
1(Xi (ω) 6 x)/n.
Dla ustalonego a ∈ R wartość dystrybuanty empirycznej jest zmienną losową, F̂ (a) : Ω →
[0, 1]. Ciąg indykatorów odpowiada schematowi Bernoulliego z prawdopodobieństwem sukcesu F (a) i dlatego zmienna losowa F̂ (a) ma następujący rozkład prawdopodobieństwa:
n
P(F̂ (a) = k/n) =
F (a)k (1 − F (a))n−k
(k = 0, 1, . . . , n).
k
1
W istocie, dane pochodzą z dwóch numerów „Gazety Wyborczej”, („Gazeta Stołeczna”, 29 sierpnia 2009
i 5 września 2009).
1.1. ROZKŁAD EMPIRYCZNY
15
1.0
noworodki
0.8
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Fn(x)
0.6
●
●
●
●
●
0.4
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0.2
●
●
●
0.0
●
●
●
●
●
●
●
●
●
2000
●
●
●
●
●
●
●
●
●
●
2500
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
3000
3500
4000
4500
x
Rysunek 1.1: Dystrybuanta empiryczna wagi noworodków. Dane z Przykładu 1.1.3.
16
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
1.1.4 DEFINICJA. Rozważmy próbkę X1 , X2 , . . . , Xn . Dla każdego ω ∈ Ω, niech X1:n (ω) 6
X2:n (ω) 6 · · · 6 Xn:n (ω) będzie ciągiem liczb X1 (ω), X2 (ω), . . . , Xn (ω) uporządkowanym w
kolejności rosnącej. Określone w ten sposób zmienne losowe X1:n , X2:n , . . . , Xn:n nazywamy
statystykami pozycyjnymi.
W szczególności, X1:n = min(X1 , . . . , Xn ) i Xn:n = max(X1 , . . . , Xn ); pierwsza i ostatnia
statystyka pozycyjna to, odpowiednio, najmniejsza i największa obserwacja w próbce.
Dystrybuanta empiryczna F̂ jest funkcją „schodkową”: jest stała na każdym z przedziałów
pomiędzy statystykami pozycyjnymi [Xi:n , Xi+1:n [. Widać, że
dla x < X1:n mamy F̂ (x) = 0;
dla Xi:n 6 x < Xi+1:n mamy F̂ (x) =
i
;
n
dla x > Xn:n mamy F̂ (x) = 1.
W punktach Xi:n funkcja F̂ ma nieciągłości (skacze w górę). Jeśli teoretyczna dystrybuanta
F jest ciągła, to P(X1:n < X2:n < · · · < Xn:n ) = 1, a więc, z prawdopodobieństwem 1, mamy
F̂ (Xi:n ) = i/n i każdy skok dystrybuanty empirycznej ma wielkość 1/n. Jeśli teoretyczna
dystrybuanta jest dyskretna, to z niezerowym prawdopodobieństwem niektóre statystyki
pozycyjne będą się pokrywać i dystrybuanta empiryczna będzie miała skoki wysokości 2/n
lub 3/n i tak dalej.
W poniższym stwierdzeniu będziemy mieli do czynienia z nieskończoną próbką, czyli z ciągiem zmiennych losowych X1 , X2 , . . . , Xn , . . ., które są niezależne i mają jednakowy rozkład
prawdopodobieństwa. Możemy sobie wyobrazić, że wciąż dodajemy do próbki nowe zmienne
losowe. Dystrybuanta empiryczna F̂n jest określona tak jak w Definicji 1.1.2, to znaczy,
zależy od początkowych zmiennych X1 , . . . , Xn . Rozpatrujemy teraz ciąg dystrybuant empirycznych F̂1 , F̂2 , . . . , F̂n , . . ..
1.1.5 Stwierdzenie. Jeśli X1 , . . . , Xn , . . . jest próbką z rozkładu o dystrybuancie F , to dla
każdego x ∈ R,
F̂n (x) →p.n. F (x), (n → ∞).
Dowód. Zmienne losowe 1(X1 6 x), . . . , 1(Xn 6 x), . . . są niezależne i mają jednakowy
rozkład prawdopodobieństwa: 1(Xn 6 x) przyjmuje wartość 1 z prawdopodobieństwem
F (x) lub wartość 0 z prawdopodobieństwem 1 − F (x). Oczywiście, E1(Xn 6 x) = F (x). Z
Mocnego Prawa Wielkich Liczb (MPWL) dla schematu Bernoulliego wynika, że zdarzenie
limn→∞ F̂n (x) = F (x) zachodzi z prawdopodobieństwem 1. To znaczy, że ciąg zmiennych
losowych F̂n (x) jest zbieżny prawie na pewno do liczby F (x).
Istnieje mocniejsza wersja poprzedniego stwierdzenia, którą przytoczymy bez dowodu. Można
pokazać, że zbieżność F̂ → F zachodzi jednostajnie z prawdopodobieństwem 1.
1.1. ROZKŁAD EMPIRYCZNY
17
0.8
0.6
Fn(x)
0.4
0.2
0.0
0.0
0.2
0.4
Fn(x)
0.6
0.8
1.0
n=25
1.0
n=10
−1
0
1
2
3
−3
−2
−1
0
x
x
n=100
n=500
1
2
3
1
2
3
0.8
0.6
Fn(x)
0.4
0.2
0.0
0.0
0.2
0.4
Fn(x)
0.6
0.8
1.0
−2
1.0
−3
−3
−2
−1
0
x
1
2
3
−3
−2
−1
0
x
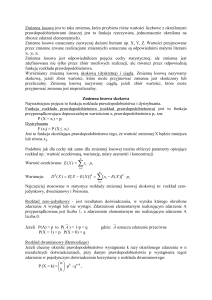
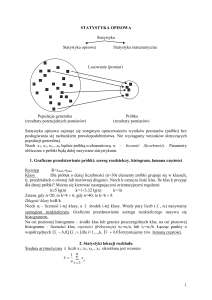
Rysunek 1.2: Zbieżność dystrybuant empirycznych do dystrybuanty.
18
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
1.1.6 TWIERDZENIE (Gliwienko-Cantelli). Jeżeli X1 , . . . , Xn , . . . jest próbką z rozkładu
o dystrybuancie F to
sup
|F̂n (x) − F (x)| →p.n. 0
(n → ∞).
−∞<x<∞
Jeśli mamy możliwość nieograniczonego powiększania próbki, to możemy poznać rozkład
prawdopodobieństwa z dowolną dokładnością.
Zamiast dowodu Twierdzenia Gliwienki-Cantelliego przytoczymy wyniki przykładowych symulacji komputerowych. Na Rysunku 1.2 widać dystrybuanty empiryczne F10 , F25 , F100
i F500 , dla próbki z rozkładu normalnego N(0, 1) – na tle teoretycznej dystrybuanty tego
rozkładu (ciągła, niebieska krzywa).
Skoncentrowaliśmy uwagę na dystrybuancie empirycznej, ale podobnie można zdefiniować
o empiryczny rozkład prawdopodobieństwa. Rozważmy zbiór borelowski B ⊆ R i próbkę
X1 , X2 , . . . , Xn z rozkładu zmiennej losowej X. Przybliżeniem nieznanej liczby P (B) =
P(X ∈ B) jest prawdopodobieństwo empiryczne
n
1X
1(Xi ∈ B).
P̂ (B) =
n i=1
Określone w ten sposób odwzorowanie P̂ : B × Ω → R, gdzie B oznacza rodzinę zbiorów borelowskich, nazywane jest empirycznym rozkładem prawdopodobieństwa. Dla
ustalonego ω ∈ Ω jest to dyskretny rozkład prawdopodobieństwa; jeśli wartości x1 =
X1 (ω), . . . , xn = Xn (ω) są różnymi liczbami to P̂ ({xi }) = 1/n dla i = 1, 2, . . . , n, czyli empiryczny rozkład prawdopodobieństwa jest rozkładem równomiernym na zbiorze {x1 , . . . , xn }.
Z drugiej strony P̂ (B) jest, dla ustalonego zbioru B, zmienną losową (a nie liczbą). Oczywiście, P̂ (] − ∞, x]) = F̂ (x).
1.1.7 Przykład (Statystyczna kontrola jakości). Producent chce się dowiedzieć, jaki procent
wytwarzanych przez niego wyrobów jest wadliwych. Sprawdza dokładnie pewną liczbę sztuk.
Powiedzmy, że badaniu poddano 50 sztuk i wyniki są takie (zakodujemy „wyrób prawidłowy”
jako liczbę „1” i „wadliwy” jako „0”):
1011111110111101111111111
1111110111111111011111111
Potraktujemy ten ciąg jako próbkę z pewnego rozkładu prawdopodobieństwa na zbiorze
dwupunktowym {prawidłowy, wadliwy} = {1, 0}. Producenta interesuje liczba
P (0) = P (wadliwy) = % sztuk wadliwych wśród wszystkich wyrobów.
1.2. MOMENTY I KWANTYLE Z PRÓBKI.
19
Na podstawie próbki możemy obliczyć prawdopodobieństwo empiryczne
P̂ (0) = P̂ (wadliwy) = % sztuk wadliwych wśród 50 zbadanych wyrobów
=
5
= 0.10.
50
Przykład jest trywialny. Chodzi tylko o to, żeby podkreślić różnicę między nieznaną, interesującą nas liczbą P (0) i znaną ale losową wielkością P̂ (0).
♦
1.2
Momenty i kwantyle z próbki.
Określimy teraz próbkowe odpowiedniki pewnych wielkości, związanych z rozkładem prawdopodobieństwa. Będziemy postępowali w podobnym duchu jak w definicji dystrybuanty
empirycznej. Cały czas X1 , . . . , Xn jest próbką. Średnią z próbki nazywamy zmienną
losową
n
1X
Xi .
X̄ =
n i=1
Widać, że X̄ jest wartością oczekiwaną rozkładu empirycznego. Podobnie, wariancja z
próbki
n
1X
2
S̃ =
(Xi − X̄)2
n i=1
jest niczym innym, jak wariancją rozkładu empirycznego. Wyższego rzędu momenty z
próbki (zwykłe i centralne) oznaczymy przez âk i m̂k :
n
1X k
X ,
âk =
n i=1 i
n
1X
m̂k =
(Xi − X̄)k .
n i=1
Są to odpowiedniki momentów, czyli
ak = EX k ,
mk = E(Xi − EX)k .
Wielkości ak i mk zależą od „prawdziwego”, teoretycznego rozkładu zmiennej losowej X,
podczas gdy âk i m̂k są obliczone dla rozkładu empirycznego. Oczywiście, â1 = X̄ i m̂2 = S̃ 2 ,
ale te dwa momenty spotykać będziemy tak często, że zasługują na specjalne oznaczenie.
Zauważmy jeszcze oczywisty związek m̂2 = â2 − â21 (Zadanie 1.4).
20
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
Kwantyle próbkowe określamy zgodnie z tym samym schematem. Po prostu zastępujemy
rozkład prawdopodobieństwa rozkładem empirycznym i obliczamy kwantyle. Przypomnijmy
najpierw definicję kwantyla. Niech 0 < q < 1. Jeśli P(X < ξq ) = F (ξq −) 6 q 6 F (ξq ) =
P(X 6 ξq ), to liczbę ξq nazywamy kwantylem rzędu q zmiennej losowej X. Taka liczba
zawsze istnieje, ale nie musi być wyznaczona jednoznacznie. Jeśli istnieje dokładnie jedna
liczba ξq taka, że P(X 6 ξq ) = F (ξq ) = q to oczywiście ξq jest q-tym kwantylem. Podobnie
jest w przypadku gdy F (ξq −) < q < F (ξq ). Jeśli jednak F (a) = F (b) = q, to każda z liczb z
przedziału [a, b] jest kwantylem.
Liczbę ξˆq nazywamy kwantylem empirycznym rzędu q, jeśli
F̂ (ξˆq −) 6 q 6 F̂ (ξˆq ).
Statystyka pozycyjna Xdnpe:n jest kwantylem empirycznym rzędu p ale niekoniecznie jedynym. Najlepiej widać to na przykładzie mediany (kwantyla rzędu q = 1/2). Jeśli rozmiar próbki n jest liczbą nieparzystą, to statystyka pozycyjna o numerze (n + 1)/2 jest
medianą z próbki. Jeśli rozmiar próbki jest liczbą parzystą, to każda z liczb z przedziału
[Xn/2:n , Xn/2+1,n ] jest medianą rozkładu empirycznego. W R i innych pakietach statystycznych, dla uniknięcia niejednoznaczności, zwykle podaje się środek przedziału median:
(Xn/2:n + Xn/2+1:n )/2. Przyjmiemy następujące oznaczenia na medianę i medianę z próbki:
med(X) = ξ1/2 ,
ˆ = med(X
ˆ
ˆ
med
1 , . . . , Xn ) = ξ1/2 .
Kwantyle rzędu 1/4 i 3/4 noszą nazwę kwartyli i bywają oznaczane Q1 i Q3
1.2.1 Przykład (Waga noworodków, kontynuacja). Dla naszej „niemowlęcej” próbki z Przykładu 1.1.3 mamy
X̄ = 3302.105,
S̃ = 502.5677
ˆ = 3330. Kwartyle próbkowe, zgodnie z naszą definiJak już zauważyliśmy poprzednio, med
cją, są równe Q1 = ξˆ1/4 = X29:114 = 2930 i Q3 = ξˆ3/4 = X86:114 = 3700 2 .
♦
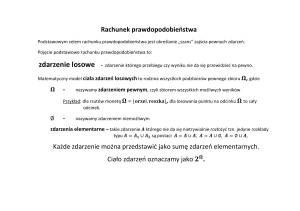
Medianę, kwartyle, minimum i maksimum próbki przedstawia tak zwany „wykres pudełkowy”
(ang. Box and Whiskers Plot, Rysunek 1.3). Boki prostokąta (na tym rysunku boki pionowe)
odpowiadają kwartylom. Kreska wewnątrz prostokąta pokazuje medianę. „Wąsy” umieszcza
się (w zasadzie) w miejscu minimum i maksimum z próbki. Wykres pudełkowy pozwala na
graficzne porównanie kilku próbek. W tym przypadku na jednym obrazku widnieje kilka
pudełek, a ich „grubość” może być związana z licznościami poszczególnych próbek.
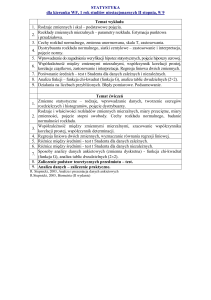
Na zakończenie naszych wstępnych rozważań wspomnimy o jeszcze jednym graficznym sposobie podsumowania danych. Na Rysunku 1.4 przedstawiony jest histogram danych z Przykładu 1.1.3. Wydaje się, że szczegółowe objaśnienia są zbędne, bo budowa histogramu jest
2
Określenie kwantyla próbkowego w pakietach statystycznych nieco różni się od naszego, ale nie ma to
zasadniczego znaczenia, szczególnie jeśli próbka jest duża. W naszym przykładzie R podaje następujące
wartości kwartyli: Q1 = ξˆ1/4 = 2947.5 i Q3 = ξˆ3/4 = 3697.5.
1.2. MOMENTY I KWANTYLE Z PRÓBKI.
21
noworodki
2000
2500
3000
3500
4000
4500
Rysunek 1.3: Wykres pudełkowy. Dane z Przykładu 1.1.3.
22
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
dość oczywista i dobrze znana czytelnikom prasy i telewidzom. Zwróćmy tylko uwagę na to,
że skala osi pionowej zastała tak dobrana, aby pole pod histogramem było równe 1, podobnie
jak pole pod wykresem gęstości prawdopodobieństwa. W istocie, histogram jest w pewnym
sensie empirycznym odpowiednikiem gęstości.
4e−04
2e−04
0e+00
Density
6e−04
Histogram of noworodki
2000
2500
3000
3500
4000
4500
noworodki
Rysunek 1.4: Histogram danych z Przykładu 1.1.3.
5000
1.3. ZADANIA
1.3
23
Zadania
1.1. Obliczyć EF̂ (x), Var F̂ (x).
1.2. Pokazać, że ciąg zmiennych losowych
Zidentyfikować parametry tego rozkładu.
√
n(F̂n (x) − F (x)) jest zbieżny do rozkładu normalnego.
1.3. Podać granicę limn→∞ P(F̂n (x) 6 F (x)) przy założeniu, że 0 < F (x) < 1. Dokładnie uzasadnić
odpowiedź.
1.4. Wyprowadzić alternatywny wzór na wariancję próbkową:
n
S̃ 2 =
1X 2
Xi − X̄ 2 .
n
i=1
1.5. Niech X1 , .P
. . , Xn będzie próbką z rozkładu normalnego N(µ, σ 2 ). Podać rozkład średniej
próbkowej X̄ =
Xi /n.
1.6. Obliczyć dystrybuantę i gęstość rozkładu zmiennej losowej Un:n = max(U1 , . . . , Un ), gdzie
U1 , . . . , Un jest próbką z rozkładu jednostajnego U(0, 1).
1.7. (Ciąg dalszy). Obliczyć EUn:n , gdzie Un:n oznacza ostatnią statystykę pozycyjną (maksimum
z próbki) z rozkładu jednostajnego U(0, 1).
1.8. (Ciąg dalszy). Obliczyć VarUn:n , gdzie Un:n oznacza maksimum z próbki z rozkładu jednostajnego U(0, 1).
1.9. (Ciąg dalszy). Zbadać zbieżność według rozkładu ciągu zmiennych losowych n(1 − Un:n ), gdzie
Un:n oznacza ostatnią statystykę pozycyjną (maksimum z próbki) z rozkładu jednostajnego U(0, 1).
1.10. Niech X1 , . . . , Xn będzie próbką z rozkładu wykładniczego Ex(λ). Obliczyć rozkład prawdopodobieństwa X1:n , pierwszej statystyki pozycyjnej (minimum z próbki). Podać dystrybuantę,
gęstość, nazwę tego rozkładu.
1.11. Rozważmy próbkę X1 , . . . , Xn z rozkładu o dystrybuancie F . Pokazać, że zmienna losowa
Xk:n (k-ta statystyka pozycyjna) ma dystrybuantę
P(Xk:n 6 x) =
n X
n
i=k
i
F (x)i (1 − F (x))n−i .
1.12. Załóżmy, że dystrybuanta F jest funkcją ciągłą i ściśle rosnącą, a zatem istnieje funkcja
odwrotna F −1 :]0, 1[→ R. Pokazać, że jeśli U ∼ U(0, 1) to zmienna losowa X = F −1 (U ) ma
dystrybuantę F .
1.13. (Ciąg dalszy). Niech Uk:n oznacza statystykę pozycyjną z rozkładu U(0, 1). Pokazać, że
Xk:n = F −1 (Uk:n ) ma rozkład taki jak statystyka pozycyjna z rozkładu o dystrybuancie F .
24
ROZDZIAŁ 1. PRÓBKOWE ODPOWIEDNIKI WIELKOŚCI POPULACYJNYCH
Rozdział 2
Modele statystyczne
2.1
Przestrzenie statystyczne
Zaczniemy od formalnej definicji, której sens postaramy się w dalszym ciągu wyjaśnić i
zilustrować przykładami.
2.1.1 DEFINICJA. Przestrzeń statystyczna jest to trójka (X , F, {Pθ ; θ ∈ Θ}), gdzie X
jest zbiorem, wyposażonym w σ-ciało F podzbiorów, zaś {Pθ ; θ ∈ Θ} jest rodziną rozkładów
prawdopodobieństwa na przestrzeni (X , F). Zbiór X nazywamy przestrzenią obserwacji zaś
Θ nazywamy przestrzenią parametrów.
Widoczny jest związek z definicją znaną z rachunku prawdopodobieństwa. Dla każdego ustalonego θ ∈ Θ, trójka (X , F, Pθ ) jest przestrzenią probabilistyczną. Najważniejszą nowością w
Definicji 2.1.1 jest to, że rozważamy rodzinę rozkładów prawdopodobieństwa, {Pθ ; θ ∈ Θ}.
Jak już powiedzieliśmy w poprzednim rozdziale, w statystyce matematycznej traktujemy
dane jako wynik doświadczenia losowego, ale nie wiemy, jaki rozkład „rządzi” badanym
zjawiskiem. Wobec tego rozpatrujemy rodzinę wszystkich branych pod uwagę rozkładów
prawdopodobieństwa. Zakładamy, że „prawdziwy” rozkład należy do tej rodziny, czyli jest
to rozkład Pθ0 dla pewnego θ0 ∈ Θ, tylko nie umiemy wskazać θ0 .
2.1.2 Uwaga (Kanoniczna przestrzeń próbkowa). Powiedzmy, że wynikiem obserwacji są
zmienne losowe X1 , . . . , Xn . Niech Ω będzie zbiorem wszystkich możliwych wyników doświadczenia losowego, a więc w naszym przypadku zbiorem ciągów ω = (x1 , . . . , xn ). Możemy
przyjąć, że zmienne losowe Xi są funkcjami określonymi na przestrzeni próbkowej Ω wzorem
Xi (ω) = xi . Wektor X = (X1 , . . . , Xn ) możemy traktować jako pojedynczą, wielowymiarową obserwację i napisać X(ω) = ω. Przy tej umowie, milcząco przyjętej w Definicji 2.1.1,
rozkład prawdopodobieństwa na przestrzeni Ω = X jest tym samym, co rozkład prawdopodobieństwa obserwacji: Pθ (B) = Pθ (X ∈ B), dla B ∈ F. Jest to, co należy podkreślić, łączny
rozkład wszystkich obserwowanych zmiennych losowych. Szczególny wybór przestrzeni Ω nie
ma zasadniczego znaczenia, jest po prostu wygodny.
25
26
ROZDZIAŁ 2. MODELE STATYSTYCZNE
2.1.3 Uwaga (Ciągłe i dyskretne przestrzenie obserwacji). Skupimy uwagę na dwóch typach
przestrzeni statystycznych, które najczęściej pojawiają się w zastosowaniach. Mówimy o modelu ciągłym, jeśli X jest borelowskim podzbiorem przestrzeni Rn , wyposażonym w σ-ciało
B zbiorów borelowskich i n-wymiarową miarę Lebesgue’a. Model nazywamy dyskretnym,
jeśli przestrzeń X jest skończona lub przeliczalna, wyposażona w σ-ciało 2X wszystkich podzbiorów i miarę liczącą.
Rozkład prawdopodobieństwa obserwacji X najczęściej opisujemy przez gęstość fθ na przestrzeni X , zależną od parametru θ ∈ Θ. W zależności od kontekstu, posługujemy się gęstością
względem odpowiedniej miary. W skrócie piszemy X ∼ fθ . Jeśli zmienna X ma skończony
lub przeliczalny zbiór wartości X , to
fθ (x) = Pθ (X = x).
(jest to gęstość względem miary liczącej). Dla jednowymiarowej zmiennej losowej X o absolutnie ciągłym rozkładzie, fθ jest „gęstością w zwykłym sensie”, czyli względem miary
Lebesgue’a. Mamy wówczas dla dowolnego przedziału [a, b],
Z
b
fθ (x)dx.
Pθ (a 6 X 6 b) =
a
Jeśli X = (X1 , . . . , Xn ) to rozumiemy, że fθ jest łączną gęstością prawdopodobieństwa na
przestrzeni X = Rn . Dla dowolnego zbioru borelowskiego B ⊆ Rn ,
Z
Z
Z
fθ (x)dx = · · · fθ (x1 , . . . , xn )dx1 · · · dxn .
Pθ (X ∈ B) =
B
B
W szczególnym przypadku, gdy zmienne X1 , . . . , Xn są niezależne i mają jednakowy rozkład,
pozwolimy sobie na odrobinę nieścisłości, oznaczając tym samym symbolem fθ jednowymiarową gęstość pojedynczej obserwacji i n-wymiarową gęstość całej próbki: fθ (x1 , . . . , xn ) =
fθ (x1 ) · · · fθ (xn ).
Jeśli T : X → R, to wartość średnią (oczekiwaną) zmiennej losowej T (X) obliczamy zgodnie
ze wzorem
R
w przypadku ciągłym;
X T (x)fθ (x)dx
Eθ T (X) =
P
w przypadku dyskretnym.
x∈X T (x)fθ (x)
R
Jeśli X ⊆ Rn , to całka X jest n-wymiarowa, dx = dx1 · · · dxn . Podobnie, będziemy używać
symboli Var θ , Covθ i podobnych.
Jeśli rodzina rozkładów prawdopodobieństwa {Pθ ; θ ∈ Θ} jest zdefiniowana przez podanie
rodziny gęstości {fθ ; θ ∈ Θ} względem pewnej (wspólnej dla wszystkich rozkładów) miary,
to mówimy, że przestrzeń statystyczna jest zdominowana. Nasze rozważania będą niemal
wyłącznie ograniczone do takich przestrzeni.
2.1. PRZESTRZENIE STATYSTYCZNE
27
Przejdziemy teraz do przykładów, które wyjaśnią sens (nieco abstrakcyjnej) Definicji 2.1.1.
2.1.4 Przykład (Statystyczna kontrola jakości, kontynuacja). Powróćmy do Przykładu
1.1.7. Przestrzenią obserwacji jest X = {0, 1}n . Obserwacje X1 , . . . , Xn są zmiennymi losowymi o łącznym rozkładzie prawdopodobieństwa
Pp (X1 = x1 , . . . , Xn = xn ) =
n
Y
pxi (1 − p)1−xi = pΣxi (1 − p)n−Σxi ,
i=1
P
Pn
gdzie xi ∈ {0, 1} dla i = 1, . . . , n i
xi oznacza
i=1 xi . Nieznanym parametrem jest
prawdopodobieństwo „sukcesu”, θ = p. Przestrzenią parametrów jest Θ = [0, 1].
♦
2.1.5 Przykład (Badanie reprezentacyjne). Powiedzmy, że populacja składa się z r jednostek. Przedmiotem badania jest nieznana liczba m jednostek „wyróżnionych”. Na przykład
może to być liczba „euroentuzjastów” w populacji wyborców albo liczba palących w populacji studentów. Interesują nas własności całej populacji, ale pełne badanie jest niemożliwe
lub zbyt kosztowne. Wybieramy losowo n jednostek spośród r i obserwujemy, ile jednostek
wyróżnionych znalazło się wśród wylosowanych. Załóżmy, że stosujemy schemat losowania
bez zwracania 1 . Najlepiej wyobrazić sobie losowe wybranie n kul z urny zawierającej r kul,
w tym m czerwonych i r − m białych. Liczby r i n są znane. Liczba X kul białych wśród
wylosowanych jest obserwacją. Zmienną losowa X ma tak zwany hipergeometryczny rozkład
prawdopodobieństwa:
, m r−m
r
Pm (X = x) =
,
x
n−x
n
zależny od parametru θ = m ze zbioru Θ = {0, 1, . . . , r}. Przestrzenią obserwacji jest zbiór
X = {0, 1, . . . , n}.
♦
Parametr θ jest „etykietką” identyfikującą rozkład prawdopodobieństwa. Nie zawsze θ jest
liczbą, może wektorem lub nawet funkcją.
2.1.6 Przykład (Model nieparametryczny). Zgodnie z Definicją 1.1.1, ciąg obserwowanych
zmiennych losowych X1 , . . . , Xn stanowi próbkę z rozkładu o dystrybuancie F , jeśli
PF (X1 6 x1 , . . . , Xn 6 xn ) = F (x1 ) · · · F (xn ).
Symbol PF przypomina, że dystrybuanta F jest nieznana i odgrywa rolę „nieskończenie wymiarowego parametru”. Przestrzenią parametrów jest zbiór wszystkich dystrybuant. Przestrzenią obserwacji jest X = Rn 2 .
♦
1
2
Próbka wylosowana w ten sposób nie jest próbką w sensie Definicji 1.1.1.
Jest to jedyny w tym skrypcie przykład przestrzeni statystycznej, która nie jest zdominowana.
28
ROZDZIAŁ 2. MODELE STATYSTYCZNE
2.1.7 Przykład (Wypadki). Liczba wypadków drogowych w ciągu tygodnia ma, w dobrym
przybliżeniu, rozkład Poissona. Niech X1 , . . . , Xn oznaczają liczby wypadków w kolejnych
tygodniach. Jeśli nic specjalnie się nie zmienia (pogoda jest podobna i nie zaczyna się właśnie
okres wakacyjny) to można przyjąć, że każda ze zmiennych Xi ma jednakowy rozkład. Mamy
wtedy próbkę z rozkładu Poissona, czyli
fθ (x1 , . . . , xn ) = Pθ (X1 = x1 , . . . , Xn = xn ) = e−θn
θΣxi
.
x1 ! · · · xn !
Przestrzenią obserwacji jest X = {0, 1, 2, . . .}n , a przestrzenią parametrów Θ =]0, ∞[. Wiemy,
że Eθ Xi = θ i Var θ Xi = θ.
♦
2.1.8 Przykład (Czas życia żarówek). Rozpatrzmy jeszcze jeden przykład z dziedziny statystycznej kontroli jakości. Producent bada partię n żarówek. Interesuje go czas życia, to
jest liczba godzin do przepalenia się żarówki. Załóżmy, że czasy życia X1 , . . . , Xn badanych
żarówek stanowią próbkę z rozkładu wykładniczego Ex(θ), czyli
fθ (x1 , . . . , xn ) =
n
Y
(θe−θxi ) = θn e−θΣxi .
i=1
Jest to typowe i dość realistyczne założenie. Mamy tutaj X = [0, ∞[n i Θ =]0, ∞[. Zauważmy, że Eθ Xi = 1/θ i Var θ Xi = 1/θ2 .
♦
2.1.9 Przykład (Pomiar z błędem losowym). Powtarzamy niezależnie n razy pomiar pewnej
wielkości fizycznej µ. Wyniki poszczególnych pomiarów X1 , . . . , Xn są zmiennymi losowymi
bo przyrząd pomiarowy jest niedoskonały. Najczęściej zakłada się, że każdy z pomiarów ma
jednakowy rozkład normalny N(µ, σ 2 ). Mamy zatem
n
1
1 X
2
fµ,σ (x1 , . . . , xn ) = √
(xi − µ) .
exp − 2
2σ
2πσ
Tutaj rolę parametru θ gra para liczb (µ, σ), gdzie −∞ < µ < ∞ i σ > 0. Przestrzenią
parametrów jest Θ = R×]0, ∞[. Oczywiście, przestrzenią obserwacji jest X = Rn . Wiemy,
że Eµ,σ Xi = µ i Var µ,σ Xi = σ 2 .
♦
2.2
Statystyki i rozkłady próbkowe
Rozpatrujemy, jak zwykle, przetrzeń statystyczną (X , F, {Pθ ; θ ∈ Θ}). Niech (T , A) będzie
przestrzenią mierzalną (znaczy to, że zbiór T jest wyposażony w σ-ciało podzbiorów A;
zazwyczaj będzie to podzbiór przestrzeni Rd z σ-ciałem borelowskim).
2.2. STATYSTYKI I ROZKŁADY PRÓBKOWE
29
2.2.1 DEFINICJA. Mierzalną funkcję T : X → T określoną na przestrzeni obserwacji X
nazywamy statystyką o wartościach w przestrzeni T .
W Definicji 2.2.1 istotne jest to, że statystyka jest wielkością obliczoną na podstawie danych
i nie zależy od nieznanego parametru θ. Będziemy w skrócie pisać T = T (X). Skupiamy
uwagę na przypadkach, kiedy przestrzeń T ma wymiar znacznie mniejszy niż X : staramy
się obliczyć taką statystykę T (X) która ma „streścić dane X”.
2.2.2 Przykład (Statystyki
Pn i inne zmienne losowe). W Przykładzie 2.1.4 (Statystyczna
kontrola jakości), S =
i=1 Xi , a więc liczba prawidłowych wyrobów w próbce jest statystyką. Oczywiście, S : {0, 1}n → {0, 1, . . . , n}. Statystyka S ma dwumianowy rozkład
prawdopodobieństwa:
n s
Pp (S = s) =
p (1 − p)n−s .
s
p
W skrócie napiszemy S ∼ Bin(n, p). Zmienna losowa (S − np)/ np(1 − p) nie jest statystyką, bo zależy od nieznanego parametru p. Ma w przybliżeniu normalny rozkład prawdopodobieństwa N(0, 1), jeśli n jest duże a p(1 − p) nie jest zbyt małe.
P
W Przykładzie 2.1.7 (Wypadki) sumaryczna liczba wypadków S = ni=1 Xi jest statystyką
i ma rozkład Poiss(nθ).
P
W Przykładzie 2.1.8 (Żarówki) średnia X̄ = (1/n) ni=1 Xi jest statystyką i ma rozkład
Gamma(n, nθ).
♦
Model normalny, wprowadzony w Przykładzie 2.1.9 zasługuje na więcej miejsca. Załóżmy,
że X1 , . . . , Xn jest próbką z rozkładu N(µ, σ 2 ). Ważną rolę w dalszych rozważaniach odgrywać
będą statystyki:
n
1X
Xi ,
X̄ =
n i=1
n
1 X
(Xi − X̄)2 ,
S =
n − 1 i=1
2
S=
√
S 2.
Zauważmy, że S 2 różni się od wariancji z próbki S̃ 2 , o której mówiliśmy w poprzednim
rozdziale: mnożnik 1/n zastąpiliśmy przez 1/(n − 1). Rozkład prawdopodobieństwa średniej
z próbki jest w modelu normalnym niezwykle prosty: X̄ ∼ N(µ, σ 2 /n). Zajmiemy się teraz
rozkładem statystyki S 2 .
Rozkład chi-kwadrat z k stopniami swobody jest to, z definicji, rozkład zmiennej losowej
Y =
k
X
Zi2 ,
i=1
gdzie Z1 , . . . , Zk są niezależnymi zmiennymi losowymi o rozkładzie N(0, 1). Będziemy pisali
symbolicznie Y ∼ χ2 (k).
30
ROZDZIAŁ 2. MODELE STATYSTYCZNE
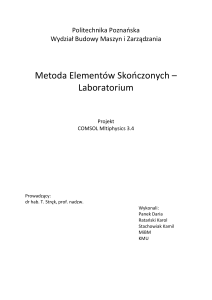
Uwaga. Rozkłady chi-kwadrat są szczególnej postaci rozkładami Gamma, mianowicie χ2 (k) =
Gamma(k/2, 1/2) (Zadanie 2.5). Jeśli Y ∼ χ2 (k) to EY = k i VarY = 2k.
Wykresy gęstości kilku rozkładów χ2 są pokazane na Rysunku 2.1.
2.2.3 Stwierdzenie (Twierdzenie Fishera). W modelu normalnym, X̄ i S 2 są niezależnymi
zmiennymi losowymi,
X̄ ∼ N(µ, σ 2 /n);
n−1 2
S ∼ χ2 (n − 1).
2
σ
Pominiemy dowód, bo w Rozdziale 9 udowodnimy twierdzenie znacznie ogólniejsze. Niezależność zmiennych losowych X̄ i S 2 nie jest oczywista. Zauważmy też, że pojawia się rozkład
chi-kwadrat z n − 1 stopniami swobody, chociaż (n − 1)S 2 jest sumą n kwadratów zmiennych
normalnych.
2.2.4 Wniosek. Eµ,σ S 2 = σ 2 i Var µ,σ S 2 = 2σ 4 /(n − 1).
Rozkład t Studenta z k stopniami swobody jest to, z definicji, rozkład zmiennej losowej
Z
,
T =p
Y /k
gdzie Z i Y są niezależnymi zmiennymi losowymi, Z ∼ N(0, 1) i Y ∼ χ2 (k). Będziemy pisali
symbolicznie T ∼ t(k). Dwa rozkłady t oraz rozkład normalny są pokazane na Rysunku 2.2.
2.2.5 Wniosek. W modelu normalnym, zmienna losowa
√
n(X̄ − µ)/S ma rozkład t(n − 1).
Rozkład F Snedecora z k i m stopniami swobody jest to, z definicji, rozkład zmiennej
losowej
Y /k
,
R=
U/m
gdzie Y i U są niezależnymi zmiennymi losowymi, Y ∼ χ2 (k) i U ∼ χ2 (m). Będziemy pisali
symbolicznie R ∼ F(k, m).
2.2.6 Przykład (Model dwóch próbek). Załóżmy, że obserwujemy niezależne zmienne lo2
sowe X1 , . . . , Xn i Y1 , . . . , Ym , przy tym Xi ∼ N(µX , σX
) i Yj ∼ N(µY , σY2 ) dla i = 1, . . . , n
2
i j = 1, . . . , m. Statystyki X̄ i SX są określone tak jak poprzednio, dla próbki X1 , . . . , Xn .
Podobnie określamy statystyki Ȳ i SY2 , dla próbki Y1 , . . . , Ym . Z tego, co powiedzieliśmy
wcześniej wynika, że
2 2
SX
σY
∼ F(n − 1, m − 1).
2 2
SY σX
2 2
2
Zauważmy, że zmienna losowa SX
σY /(SY2 σX
) nie jest statystyką, bo zależy nie tylko od
2
obserwacji, ale i od nieznanych paramerów σX i σY . Jeśli założymy, że σX
= σY2 to statystyka
2
2
SX /SY ma rozkład F(n − 1, m − 1).
2.2. STATYSTYKI I ROZKŁADY PRÓBKOWE
31
chi2( 2 )
0.3
density
0.2
2
0
0.0
0.1
1
density
3
0.4
4
0.5
chi2( 1 )
0
2
4
6
χ
8
10
0
2
4
6
χ
2
10
chi2( 10 )
0.06
density
0.04
0.00
0.00
0.02
0.05
density
0.10
0.08
0.15
0.10
chi2( 5 )
8
2
0
5
10
χ
2
15
20
0
5
10
χ
15
20
2
Rysunek 2.1: Rozkłady χ2 dla różnej liczby stopni swobody.
32
ROZDZIAŁ 2. MODELE STATYSTYCZNE
0.4
t−Student
t(1)
0.1
0.2
N(0,1)
0.0
density
0.3
t(3)
−4
−2
0
2
4
t
Rysunek 2.2: Rozkłady t Studenta i rozkład normalny.
2.3. DOSTATECZNOŚĆ
33
2
Podobnie, jeśli σX
= σY2 = σ 2 to
X̄ − Ȳ − (µX − µY )
p
2
(k − 1)SX
+ (m − 1)SY2
r
km
(k + m − 2) ∼ t(k + m − 2).
k+m
♦
2.3
Dostateczność
Rozważmy przestrzeń statystyczną (X , F, {Pθ : θ ∈ Θ}) i statystykę T = T (X) o wartościach
w przestrzeni (T , A).
2.3.1 DEFINICJA. Statystykę T = T (X) nazywamy dostateczną, jeśli warunkowy rozkład prawdopodobieństwa obserwacji X przy danej wartości statystyki T = t nie zależy od
parametru θ, dla każdego t ∈ T .
Uwaga. W pewnym uproszczeniu, statystyka jest dostateczna, jeśli prawdopodobieństwo warunkowe
(*)
Pθ (X ∈ B|T (X) = t) nie zależy od θ,
dla dowolnego zbioru B ∈ F i (prawie) każdego t. Niestety, ścisłe sformułowanie Definicji
2.3.1 wymaga znajomości ogólnego pojęcia warunkowego rozkładu prawdopodobieństwa i
teorii miary. Zwróćmy uwagę, że określenie warunkowego rozkładu poprzez gęstość tutaj się
bezpośrednio nie stosuje, bo rozkład X przy danym T (X) = t jest zazwyczaj skupiony na
„podprzestrzeni o niższym wymiarze”, patrz Zadanie 2.15. Jeśli jednak X jest przestrzenią
dyskretną, to możemy się posłużyć elementarną definicją prawdopodobieństwa warunkowego.
W tym przypadku warunek (∗) redukuje się do tego, że
(**)
Pθ (X = x|T (X) = t) nie zależy od θ,
dla dowolnych t i x (to prawdopodobieństwo jest niezerowe tylko jeśli T (x) = t).
Sens Definicji 2.3.1 wyjaśni „doświadczenie myślowe”. Wyobraźmy sobie, że statystyk zaobserwował X = x, obliczył i zapisał T (x) = t, po czym. . . zgubił dane, czyli stracił x.
Może jednak wylosować „sztuczne dane” X 0 z rozkładu warunkowego obserwacji przy danym
T = t, ponieważ ten rozkład nie wymaga znajomości θ. Skoro sztuczne dane X 0 mają ten
sam rozkład prawdopodobieństwa co prawdziwe dane X, więc nasz statystyk nic nie stracił
zapisując t i zapominając x. Stąd właśnie nazwa: statystyka dostateczna zawiera całość
informacji o parametrze zawartych w obserwacji.
Załóżmy teraz, że przestrzeń statystyczną (X , F, {Pθ : θ ∈ Θ}) jest zdominowana (Uwaga
2.1.3), to znaczy rozkłady Pθ mają gęstości fθ . Zwykle są to albo gęstości względem miary
Lebesgue’a, albo „gęstości dyskretne” fθ (x) = Pθ (X = x).
34
ROZDZIAŁ 2. MODELE STATYSTYCZNE
2.3.2 TWIERDZENIE (Kryterum faktoryzacji). Statystyka T = T (X) jest dostateczna
wtedy i tylko wtedy gdy gęstości obserwacji można przedstawić w postaci
fθ (x) = gθ (T (x))h(x).
Dowód. Żeby uniknąć trudności technicznych, ograniczymy się tylko do przypadku dyskretnej przestrzeni X . Jeśli T (x) = t to
fθ (x)
0
x0 :T (x0 )=t fθ (x )
Pθ (X = x|T (X) = t) = P
i oczywiście Pθ (X = x|T (X) = t) = 0 jeśli T (x) 6= t. Jeżeli spełniony jest warunek faktoryzacji to natychmiast otrzymujemy, w przypadku T (x) = t,
h(x)
gθ (t)h(x)
P
=
.
0
0
x0 :T (x0 )=t gθ (t)h(x )
x0 :T (x0 )=t h(x )
Pθ (X = x|T (X) = t) = P
Odwrotnie, jeśli Pθ (X = x|T (X) = t) P
nie zależy od θ to własność faktoryzacji zachodzi dla
h(x) = Pθ (X = x|T (X) = t) i gθ (t) = x0 :T (x0 )=t fθ (x0 ).
2.3.3 Przykład (Ile jest kul w urnie?). Kule w urnie są ponumerowane: U = {1, 2, . . . , r}
ale r jest nieznane. Pobieramy próbkę n kul, bez zwracania. Niech S oznacza losowy zbiór
numerów a max(S) – największy spośród nich. Prawdopodobieństwo wylosowania zbioru
s ⊂ U jest równe
( 1 nr
jeśli r > max(s),
1(r > max(s))
=
Pr (S = s) =
r
0
jeśli r < max(s).
n
Stąd widać, że max(S) jest statystyką dostateczną. W czasie II wojny światowej alianci notowali seryjne numery zdobytych czołgów niemieckich w celu oszacowania liczby produkowanych przez nieprzyjaciela czołgów. Rozważany schemat urnowy jest uproszczonym modelem
takiej sytuacji.
♦
2.3.4 Przykład (Statystyki dostateczne w poprzednich
przykładach). W Przykładzie 2.1.4
Pn
(Schemat Bernoulliego), liczba sukcesów S = i=1 Xi jest statystyką dostateczną.
P
W Przykładzie 2.1.7 (model Poissona) suma obserwacji S = ni=1 Xi jest statystyką dostateczną.
P
W Przykładzie 2.1.8 (model wykładniczy) średnia X̄ = (1/n) ni=1 Xi jest statystyką dostateczną.
W Przykładzie 2.1.9 (model normalny z nieznanymi µ i σ) (X̄, S 2 ) jest dwuwymiarową
statystyką dostateczną.
♦
2.4. RODZINY WYKŁADNICZE
2.4
35
Rodziny wykładnicze
Tak jak poprzednio, rozważamy model statystyczny, a więc rodzinę rozkładów prawdopodobieństwa na przestrzeni obserwacji X .
2.4.1 DEFINICJA. Rodzina rozkładów prawdopodobieństwa {Pθ : θ ∈ Θ} jest rodziną
wykładniczą jeśli rozkłady Pθ mają, względem pewnej miary na X , gęstości fθ postaci:
X
k
fθ (x) = exp
Tj (x)ψj (θ) + ψ0 (θ) h(x), (θ ∈ Θ).
j=1
Podkreślmy, że w tej definicji wymagamy, żeby istniały gęstości względem jednej miary
wspólnej dla wszystkich θ. W większości zastosowań spotykamy, jak zwykle, albo gęstości
względem miary Lebesgue’a, albo „gęstości dyskretne” fθ (x) = Pθ (X = x). Bez straty
ogólności można zakładać, że funkcje T1 (x), . . . , Tk (x) są liniowo niezależne. To założenie
będze w dalszym ciągu obowiązywać. Zauważmy prostą konsekwencję Definicji 2.4.1. Zbiór
{x : fθ > 0}, który nazywamy nośnikiem rozkładu Pθ , 3 jest taki sam dla wszystkich θ.
2.4.2 Przykład. Rodzina rozkładów jednostajnych {U(0, θ) : θ > 0} nie jest rodziną wykładniczą. Ponieważ
1
fθ (x) = 1(0 6 x 6 θ),
θ
więc nośnikiem rozkładu U(0, θ) jest przedział [0, θ], który oczywiście zależy od θ.
♦
2.4.3 Przykład. Rodzina rozkładów wykładniczych {Ex(θ) : θ > 0} jest rodziną wykładniczą, bo gęstości możemy napisać w następującej postaci:
fθ (x) = θe−θx = exp(−θx + log θ).
Nośnikiem każdego rozkładu wykładniczego jest ten sam przedział [0, ∞[.
♦
2.4.4 Przykład. Rodzina rozkładów {Poiss(θ) : θ > 0} jest rodziną wykładniczą, bo
1
θx
fθ (x) = e−θ = exp − θ + x log θ
.
x!
x!
Oczywiście, każdy rozkład Poissona ma nośnik {0, 1, 2, . . .}.
♦
2.4.5 Przykład. Rodzina przesuniętych rozkładów Cauchy’ego o gęstościach
fθ (x) =
1
,
π(1 + (x − θ)2 )
2
θ ∈] − ∞, ∞[, nie jest rodziną wykładniczą, bo funkcja
Pk log fθ (x) = − log π − log(1 + (x − θ) )
nie da się przedstawić w postaci sumy iloczynów j=1 Tj (x)ψj (θ) + ψ0 (θ).
♦
3
Pozwalamy tu sobie na drobne uproszczenie, bo gęstość rozkładu prawdopodobieństwa jest wyznaczona
jednoznacznie tylko prawie wszędzie.
36
ROZDZIAŁ 2. MODELE STATYSTYCZNE
2.4.6 Przykład. Rodzina rozkładów {Gamma(α, λ) : α > 0, λ > 0} jest rodziną wykładniczą.
λα
λα α−1 −λx
x e
= exp − λx + (α − 1) log x + log
fα,λ (x) =
Γ(α)
Γ(α)
Oczywiście, wspólnym nośnikiem wszystkich rozkładów Gamma jest przedział ]0, ∞[.
♦
Inne przykłady rodzin wykładniczych to między innymi rodzina rozkładów normalnych
{N(µ, σ) : −∞ < µ < ∞, λ > 0}, rozkładów {Beta(α, β) : α, β > 0}, rodzina rozkładów
dwumianowych {Bin(n, θ) : 0 < θ < 1}, ujemnych dwumianowych i wiele innych. Przejdźmy
do omówienia kilku ciekawych własnosci rodzin wykładniczych.
2.4.7 Stwierdzenie. Jeżeli X1 , . . . , Xn ∼iid fθ jest próbką z rozkładu należącego do rodziny
wykładniczej, to k-wymiarowy wektor
!
n
n
X
X
T1 (Xi ), . . . ,
Tk (Xi )
i=1
i=1
jest statystyką dostateczną.
Dowód. Jeżeli fθ ma postać taką jak w Definicji 2.4.1, to łaczna gęstość wektora obserwacji
jest następująca:
X
n
k
Y
fθ (x1 , . . . , xn ) =
exp
Tj (xi )ψj (θ) + ψ0 (θ) h(xi )
i=1
= exp
j=1
X
k X
n
Y
n
Tj (xi )ψj (θ) + nψ0 (θ)
h(xi ).
j=1 i=1
i=1
Wystarczy teraz skorzystać z kryterium faktoryzacji (Twierdzenie 2.3.2).
Zwróćmy uwagę, że dla wymiar statystyki dostatecznej w powyższym stwierdzeniu jest równy
k, niezależnie od rozmiaru próbki n. Dla próbki z rodziny wykładniczej możliwa jest bardzo radykalna redukcja danych bez straty informacji. Zauważmy jeszcze, że k w Definicji
2.4.1 wydaje się być związane z wymiarem przestrzeni parametrów. W Przykładach 2.4.3 i
2.4.4 mieliśmy jednoparametrowe rodziny wykładnicze, w Przykładzie 2.4.6 – dwuparametrową rodzinę. Staje się to bardziej przejrzyste, jeśli posłużymy się tak zwaną naturalną
parametryzacją rodzin wykładniczych. Przyjmijmy wektor
ψ = (ψ1 , . . . , ψk ) = (ψ1 (θ), . . . , ψk (θ))
za nowy parametr, który identyfikuje rozkłady prawdopodobieństwa rozpatrywanej rodziny.
Nieco nadużywając oznaczeń możemy napisać
!
k
X
(2.4.8)
fψ (x) = exp
Tj (x)ψj − b(ψ) h(x),
j=1
2.4. RODZINY WYKŁADNICZE
37
gdzie
Z
b(ψ) = log
exp
X
k
X
!
Tj (x)ψj h(x)dx.
j=1
Jeśli istnieje wzajemnie jednoznaczna odpowiedniość pomiędzy „starym parametrem” θ ∈ Θ
i „nowym parametrem” ψ, to wybór jednej lub drugiej parametryzacji jest tylko kwestią
wygody.
2.4.9 Przykład. Rozkłady dwumianowe Bin(θ, n) mają gęstości postaci
n
n x
n−x
fθ (x) =
θ (1 − θ)
= exp x log θ + (n − x) log(1 − θ)
x
x
n
θ
+ n log(1 − θ)
.
= exp x log
x
1−θ
Naturalnym parametrem jest
ψ = log
θ
1−θ
zaś b(ψ) = n log(1 + eψ ). Zauważmy, że θ/(1 − θ) jest tak zwanym „ilorazem szans”: stosunkiem prawdopodobieństwa sukcesu do prawdopodobieństwa porażki. Funkcja Jeśli θ zmienia
się w przedziale ]0, 1[ to ψ przebiega przedział ]∞, ∞[. Naturalną przestrzenią parametrów
jest więc cała prosta rzeczywista.
♦
2.4.10 Uwaga. Mówimy, że rodzina wykładnicza jest regularna, jeśli przestrzeń naturalnych
parametrów {ψ(θ) : θ ∈ Θ}, traktowana jako podzbiór Rk , ma niepuste wnętrze. Ważną własnością regularnych rodzin wykładniczych jest dopuszczalność „różniczkowania pod znakiem
całki”. Jeśli U : X → R jest statystyką to
Z
Z
∂
∂
U (x)fψ (x)dx =
U (x)
fψ (x)dx,
∂ψj X
∂ψj
X
jeśli ψ jest punktem wewnętrznym naturalnej przestrzeni parametrów i całka po lewej stronie jest dobrze określona. Co więcej, podobna własność zachodzi dla pochodnych wyższych
rzędów. Oczywiście, jeśli funkcje ψj (θ) są odpowiednio gładkie, to możemy bezpiecznie „różniczkować pod znakiem całki” również względem θ. W następnym rozdziale takie operacje
rachunkowe będą odgrywały ważną rolę.
38
2.5
ROZDZIAŁ 2. MODELE STATYSTYCZNE
Zadania
2.1. Rozpatrzmy proces statystycznej kontroli jakości przyjmując te same założenia co w Przykładzie 2.1.4 z tą różnicą, że obserwujemy kolejne wyroby do momentu gdy natrafimy na k wybrakowanych, gdzie k jest ustaloną z góry liczbą. Zbudować model statystyczny.
2.2. Uogólnić rozważania z Przykładu 2.1.5 (badanie reprezentacyjne), uwzględniając więcej niż
jeden rodzaj jednostek „wyróżnionych”. Powiedzmy, że mamy w urnie m1 kul czerwonych, m2
zielonych i r − m1 − m2 białych, gdzie r jest znaną liczbą, a m1 i m2 są nieznane i są przedmiotem
badania. Opisać dokładnie odpowiedni model statystyczny.
2.3. Obliczyć rozkład prawdopodobieństwa zmiennej losowej Z 2 , jeśli Z ∼ N(0, 1) (obliczyć bezpośrednio dystrybuantę i gęstość rozkładu χ2 (1)).
2.4. Obliczyć rozkład prawdopodobieństwa zmiennej losowej Z12 + Z22 , jeżeli Zi ∼ N(0, 1) są niezależne dla i = 1, 2 (obliczyć bezpośrednio dystrybuantę i gęstość rozkładu χ2 (2)).
2.5. Korzystając z Zadania 2.3 oraz z własności rozkładów gamma, udowodnić Uwagę 2.2: gęstość
zmiennej losowej Y ∼ χ2 (k) ma postać
fY (y) =
1
2k/2 Γ(k/2)
y k/2−1 e−y/2 ,
(y > 0).
2.6. Udowodnić zbieżność rozkładów: t(k) →d N(0, 1) dla k → ∞.
2.7. Udowodnić wzór dotyczący rozkładu t-Studenta na końcu Przykładu 2.2.6.
2.8. Niech X1 , . . . , Xn będzie próbką z rozkładu (Weibulla) o gęstości
(
3
3θx2 e−θx
dla x > 0;
fθ (x) =
0
dla x 6 0,
gdzie θ > 0 jest nieznanym parametrem. Znaleźć jednowymiarową statystykę dostateczną.
2.9. Niech X1 , . . . , Xn będzie próbką z rozkładu Gamma(α, λ). Znaleźć dwuwymiarową statystykę
dostateczną, zakładając że θ = (α, λ) jest nieznanym parametrem.
2.10. Rozważamy rodzinę przesuniętych rozkładów wykładniczych o gęstości
(
e−(x−µ) dla x > µ;
fµ (x) =
0
dla x < µ.
Niech X1 , . . . , Xn będzie próbką losową z takiego rozkładu. Znaleźć jednowymiarową statystykę
dostateczną dla parametru µ.
2.11. Rozważamy rodzinę przesuniętych rozkładów wykładniczych z parametrem skali o gęstości
(
λe−λ(x−µ) dla x > µ;
fµ,λ (x) =
0
dla x < µ.
Niech X1 , . . . , Xn będzie próbką losową z takiego rozkładu. Znaleźć dwuwymiarową statystykę
dostateczną dla parametru (µ, λ).
2.5. ZADANIA
39
2.12. Rozważamy rodzinę rozkładów na przestrzeni {0, 1, 2, . . .}:
(
θ
dla x = 0;
fθ (x) = Pθ (X = x) =
(1 − θ)/2x dla x ∈ {1, 2, . . .}.
gdzie θ ∈]0, 1[ jest nieznanym parametrem. Niech X1 , . . . , Xn będzie próbką losową z wyżej podanego rozkładu. Znaleźć jednowymiarową statystykę dostateczną.
2.13. Niech X1 , . . . , Xn będzie schematem Bernoulliego z prawdopodobieństwem sukcesu θ. Obliczyć warunkowy
Pn rozkład prawdopodobieństwa zmiennych losowych X1 , . . . , Xn przy danym S = s,
gdzie S = i=1 Xi jest liczbą sukcesów. Zinterpretować fakt, że statystyka S jest dostateczna.
2.14. Niech X1 , . . . , Xn będzie próbką z rozkładu Poiss(θ). Obliczyć warunkowy
rozkład prawdopoP
dobieństwa zmiennych losowych X1 , . . . , Xn przy danym S = s, gdzie S = ni=1 Xi . Zinterpretować
fakt, że statystyka S jest dostateczna.
P
2.15. Niech X1 , . . . , Xn będzie próbką z rozkładu Ex(θ). Niech S = ni=1 Xi . Pokazać, że rozkład
warunkowy
(X1 , . . . , Xn−1 ) przy danym S = s jest jednostajny na sympleksie {(x1 , . . . , xn−1 ) : xi >
P
x
6
s}. Zinterpretować fakt, że statystyka S jest dostateczna.
0, n−1
i=1 i
2.16. Znaleźć rozkład zmiennej losowej
n
1 X
(Xi − µ)2
σ2
i=1
w modelu normalnym. Porównać z twierdzeniem Fishera (Stwierdzenie 2.2.3).
2.17. (Ciąg dalszy). Wyprowadzić tożsamość
n
n
1 X
1 X
n
2
(Xi − µ) = 2
(Xi − X̄)2 + 2 (X̄ − µ)2 .
2
σ
σ
σ
i=1
i=1
Jaki jest rozkład prawdopodobieństwa pierwszego i drugiego składnika po prawej stronie?
2.18. Rozważmy jednoparametryczną
wykładniczą rodzinę rozkładów z gęstościami danymi wzorem
fψ (x) = exp T (x)ψ − b(ψ) h(x). Pokazać, że
Eψ T (X) =
∂b(ψ)
.
∂ψ
2.19. (Ciąg dalszy). Pokazać, że
Var ψ T (X) =
∂ 2 b(ψ)
.
∂ψ 2
2.20. (Ciąg dalszy). Pokazać, że
Eψ exp rT (X) = exp b(ψ + r) − b(ψ) .
40
ROZDZIAŁ 2. MODELE STATYSTYCZNE