ELEKTRYKA
Zeszyt 3 (215)
2010
Rok LVI
Krzysztof KRYKOWSKI, Grzegorz SIEMEK, Dawid WALCZAK
Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki, Politechnika Śląska
w Gliwicach
WPŁYW INDUKCYJNOŚCI NA CHARAKTERYSTYKI
MECHANICZNE SILNIKA PM BLDC
Streszczenie. Podczas przełączania uzwojeń fazowych bezszczotkowego silnika
prądu stałego pojawiają się dodatkowe spadki napięcia na indukcyjnościach obwodu
głównego. Pominięcie wpływu spadków napięcia na indukcyjnościach obwodu
głównego, jak to się zazwyczaj czyni, powoduje, Ŝe prędkości obliczone są wyŜsze od
prędkości pomierzonych w rzeczywistym silniku PM BLDC. W artykule przedstawiono
analityczną metodę wyznaczania charakterystyki mechanicznej silnika PM BLDC
znacznie dokładniejszą od powszechnie stosowanej metody, w której pomija się wpływ
indukcyjności. Opracowana metoda uwzględnia spadki napięcia na indukcyjnościach
obwodu głównego, a jej poprawność zweryfikowano za pomocą badań laboratoryjnych
i symulacyjnych.
Słowa kluczowe: napęd elektryczny, silniki bezszczotkowe
INDUCTANCE IMPACT ON PM BLDC MOTOR TORQUE-SPEED
CHARACTERISTICS
Summary. When phase windings of brushless dc motors are switched over,
additional voltage drops across main circuit inductances arise. If these voltages are
neglected, which is common practice, the calculated speeds are higher than speeds
actually measured in real PM BLDC motor. The paper presents analytical method of
determining torque-speed characteristics of PM BLDC motor; this method is much more
accurate than usually adopted procedure neglecting inductances impact. The proposed
method has been worked out by the authors and it takes into account the voltage drops
across main circuit inductances. It has been verified by laboratory and simulation tests.
Keywords: electric drive, brushless motors
1. WPROWADZENIE
Bezszczotkowy silnik prądu stałego wzbudzany magnetoelektrycznie, nazywany
w skrócie silnikiem PM BLDC (ang. Permanent Magnet Brushless Direct Current), jest to
silnik wzbudzany magnesami trwałymi, w którym komutator mechaniczny zastępuje się
116
K. Krykowski, G. Siemek, D. Walczak
przekształtnikiem elektronicznym, zwanym często komutatorem elektronicznym. Silnik
PM BLDC ma charakterystyki mechaniczne podobne do charakterystyk silnika prądu stałego.
Przy analizie charakterystyk mechanicznych tego silnika [1], [3] zazwyczaj pomija się wpływ
indukcyjności uzwojeń i zakłada prostokątne przebiegi prądów fazowych oraz stałą wartość
prądu obwodu głównego. W rzeczywistym silniku zjawiska łączeniowe powodują jednak, Ŝe
prądy fazowe narastają wykładniczo, a ich wartości średnie, przy załoŜonej sile
elektromotorycznej (prędkości obrotowej), są mniejsze niŜ w silniku idealnym o pomijalnym
wpływie indukcyjności.
T1
T3
D1
T5
D3
Zawory grupy
dodatniej
L1
iB
T4
D2
B
L2
T6
D4
A
D5
Ud
T2
iA
C
D6
Zawory grupy
ujemnej
Układ sterowania
L3
iC
CPW
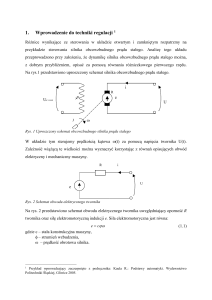
Rys. 1. Schemat silnika PM BLDC z komutatorem elektronicznym o strukturze mostka 3-fazowego
Fig. 1. Scheme of PM BLDC motor with 3-phase bridge electronic commutator
Na rys. 1 przedstawiono schemat obwodów głównych silnika PM BLDC z trójfazowym
uzwojeniem stojana i przekształtnikiem połączonym w strukturze mostka. Zawory (tranzystory) przekształtnika (komutatora elektronicznego) są załączane sygnałami wypracowywanymi w układzie sterowania za pomocą sygnałów z dyskretnego czujnika połoŜenia
(CPW), najczęściej hallotronowego. Przebiegi fazowych prądów i sił elektromotorycznych
oraz momentu elektromagnetycznego i jego składowych przedstawiono na rys. 2a dla silnika
o pomijalnym wpływie indukcyjności oraz na rys. 2b dla silnika o znaczącym wpływie
indukcyjności. Na rysunku 3 przedstawiono natomiast przykładowe przebiegi prądów
fazowych i sygnału synchronizującego z hallotronowego czujnika połoŜenia pomierzone dla
silnika rzeczywistego.
Wpływ indukcyjności na charakterystyki…
a)
117
b)
EA
iA
Rs iA
iA =iT1
iA =-iT2
Ud
2
Em
-Em
EB
iB
Rs iB
Ud
2
iB =iT3
iB =-iT4
Ud
2
Em
-Em
iC =iT5
Em
iC =-iT6
-Em
Me
e
Ud
2
RC iC
EC
iC
e
Ud
2
Ud
2
e
Me2
+ Me2+Me1 Me3+Me1 Me3+Me2 Me1+Me2 Me1+Me3 Me2+Me3
Me3
0
2
3
2
e
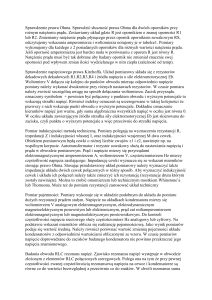
Rys. 2. Przebiegi sił elektromotorycznych, prądów fazowych i momentu silnika a) o pomijalnym
wpływie indukcyjności silnika, b) w którym uwzględniono wpływ indukcyjności
Fig. 2. EMF, phase currents and torque waveforms with a) inductances neglected, b) inductances taken
into account
iA
iC
HA
Rys. 3. Przebiegi prądów dwóch faz oraz napięcia z hallotronu
Fig. 3. Phase currents waveforms (two phases) and Hall sensor voltage waveform
2. SILNIK O POMIJALNYM WPŁYWIE INDUKCYJNOŚCI UZWOJEŃ
Jeśli pominąć wpływ indukcyjności uzwojeń, to przełączanie uzwojeń odbywa się
natychmiastowo, przez cały czas przewodzą dwa zawory (jeden grupy dodatniej i jeden grupy
ujemnej), a prądy fazowe mają kształt prostokątny, tak jak to pokazano na rys. 2a. Obwód
główny ma natomiast strukturę jak na rys. 4, przy czym indeksami p oraz q oznaczono
numery przewodzących faz silnika zasilanych przez zawory grupy dodatniej i ujemnej.
118
K. Krykowski, G. Siemek, D. Walczak
Rys. 4. Obwód główny przekształtnika przy załączonych fazach p oraz q silnika
Fig. 4. Converter main circuit with motor phases p and q switched on
W przypadku korzystania ze schematu przedstawionego na rys. 4 fazowe SEM
pracujących uzwojeń moŜna zastąpić sumaryczną SEM określoną dla obwodu zastępczego.
Dla silnika o trapezowej sile elektromotorycznej wartości fazowych sił elektromotorycznych
dla faz przewodzących są w obszarze przewodzenia stałe. Stały jest równieŜ współczynnik
wzbudzenia oraz wartości fazowych rezystancji i indukcyjności. Obwód główny
przedstawiony na rys. 4 moŜna więc opisać zaleŜnością:
U d = 2 Rs id + 2 Ls
d id
di
+ 2 Efp = 2 Rs id + 2 Ls d + 2 K fpω
dt
dt
(1)
w której przez Efp oraz Kfp oznaczono fazową siłę elektromotoryczną i fazowy współczynnik
wzbudzenia dla obszaru czynnego (podstawa trapezu).
Dla pomijalnie małych wartości indukcyjności moŜna zaleŜność (1) zapisać jako
U d = 2 Rs I d + 2 Efp
(2)
a po przekształceniu sprowadzić do postaci
ω=
U d − 2 Rs I d
2 K fp
(3)
n=
U d − 2 Rs I d
2Ke
(4)
lub
przy czym
Ke = 2
Moment
elektromagnetyczny
30
π
rozwijany
K fs
przez
(5)
silnik
o
pomijalnym
wpływie
indukcyjności (przy dwóch fazach przewodzących) wynosi
M e = 2 K fp I d
(6)
Wpływ indukcyjności na charakterystyki…
119
Łącząc zaleŜności (3) oraz (6) uzyska się zaleŜność
U d − Rs
ω=
Me
K fp
(7)
2K fp
opisującą charakterystykę mechaniczną silnika.
3. PRZEŁĄCZENIE UZWOJEŃ FAZOWYCH W RZECZYWISTYM SILNIKU
W czasie przełączania (komutacji) pojawiają się krótkotrwałe struktury, w których
przewodzą trzy uzwojenia fazowe silnika. Powodują one zmianę parametrów obwodu
zastępczego prądu stałego oraz prądu płynącego w tym obwodzie.
Strukturę obwodu głównego silnika przy przełączaniu uzwojeń przedstawiono za pomocą
grafów na rysunku 5. Na poszczególnych grafach zaznaczono fazowe SEM oraz podano
numery zaworów przewodzących. Dla silnika idealnego całkowita SEM obwodu prądu
stałego jest stała. Wynika to z faktu, Ŝe dla ujemnej SEM fazy 3 wziętej ze znakiem minus
rzeczywista biegunowość napięcia jest zgodna z kierunkiem strzałki.
a)
b)
c)
Rys. 5. Grafy przepływu prądu w czasie przełączania faz silnika PM BLDC
Fig. 5. Current flow graphs during phase switch-overs, PM BLDC motor
Rysunek wykonano dla przekształtnika o strukturze przedstawionej na rys. 1 przy
wyłączaniu fazy A (tranzystor T1) i załączaniu fazy B (tranzystor T3). Przykładowe przebiegi
prądów faz komutujących (przełączanych) przedstawiono natomiast na rysunku 6.
Równoczesne załączenie tranzystora (T3) fazy B i wyłączenie tranzystora (T1) fazy A
następuje w chwili t0. Faza C jest natomiast przez cały czas komutacji załączona, a prąd tej
fazy płynie przez tranzystor T6. Dla czasu mniejszego od t0 obowiązuje struktura z rysunku
5a. Dla czasu równego t0 następuje wyłączenie tranzystora T1 i załączenie tranzystora T3. Jeśli
pominąć czas wyłączania tranzystora i czas załączania diody, to równocześnie z wyłączeniem
tranzystora T1 i załączeniem tranzystora T3 następuje załączenie diody D2 i układ przyjmuje
120
K. Krykowski, G. Siemek, D. Walczak
strukturę z rysunku 5b. Gdy w chwili t1 prąd diody D2 zmaleje do zera, układ przyjmuje
strukturę z rysunku 5c.
W typowych warunkach pracy silnika siła elektromotoryczna, ze względu na
bezwładność wirnika, pozostaje praktycznie stała. Wyraźne zmiany siły elektromotorycznej
występują jedynie przy małych prędkościach obrotowych silnika. W czasie komutacji wywołanej przełączaniem zaworów występuje zmiana zarówno momentu elektromagnetycznego,
jak i prądu silnika.
W czasie komutacji moŜna wyróŜnić dwa
przedziały przewodzenia komutatora. Przedział
Idu
pierwszy, w którym następuje zanik prądu fazy
tzs
Id2
zstępującej oraz przedział drugi, w którym nastęId(AV)
puje ustalanie prądu fazy wstępującej. W dalszych
rozwaŜaniach czas rozpoczęcia komutacji przyjęto,
zgodnie z rys. 6, jako t0 = 0. Dla czasu t1 następuje
t0 t1
t2
t
zanik prądu zstępnego, czas trwania taktu pracy
komutatora elektronicznego oznaczono przez Ts.
Ts
Rys. 6. Przebiegi prądów fazy 1 oraz 2
podczas komutacji
Fig. 6. Phase 1 and 2 currents during
commutation
Jak widać, komutacja powoduje między innymi: zmianę warunków zasilania
poszczególnych faz silnika oraz zmniejszenie się wartości średniej prądu.
4. WYZNACZENIE WARTOŚCI KOMUTACYJNEGO SPADKU NAPIĘCIA
Wpływ komutacji na prędkość i prąd silnika PM BLDC moŜna łatwo wyznaczyć
pomijając wpływ prądu płynącego w fazie niebiorącej udziału w komutacji i przyjmując, dla
przedziału komutacji, następujące załoŜenia upraszczające:
siły elektromotoryczne w fazie przekazującej obciąŜenie i w fazie przejmującej obciąŜenie
są sobie równe,
1
Ed
2
napięcia fazowe są sobie liczbowo równe, lecz mają przeciwny znak,
1
u B = −u A = U d
2
wpływ rezystancji uzwojeń silnika i przewodów łączących jest pomijalnie mały.
eB = eA =
Rs = 0
(8)
(9)
(10)
Wpływ indukcyjności na charakterystyki…
121
Schemat obwodów przekształtnika w czasie komutacji (struktura z rys. 5b) po przyjęciu
wymienionych załoŜeń uproszczających ma postać jak na rys. 7.
W przebiegu prądu fazy niebiorącej udziału w komutacji występuje załamanie (rys. 2b),
lecz jej wartość średnia (w przypadku znacznych wartości indukcyjności) jest w przybliŜeniu
równa średniej wartości prądu źródła.
eA
1
Ed
2
Ls
eB
1
Ed
2
Ls
eC
1
Ed
2
uA
1
Ud
2
Ls
uB
1
Ud
2
uC 1 Ud
2
Rys. 7. Struktura przekształtnika w czasie komutacji
Fig. 7. Converter structure during commutation
Przyjmując załoŜenie uproszczające, Ŝe prąd fazy niebiorącej udziału w komutacji jest
w czasie komutacji w przybliŜeniu stały i moŜna go aproksymować wartością średnią,
zgodnie z zaleŜnością
iA + iB = −ic = I d
(11)
to schemat obwodu, w którym zachodzi komutacja, uprości się do postaci jak na rys. 8. Prąd
iQ płynący w obwodzie komutacji wynika z zaleŜności
u B − u A = 2 Ls
d iQ
+ eB − eB
dt
Po podstawieniu zaleŜności (8) oraz (9) do wyraŜenia (12) uzyska się:
U d = 2 Ls
a)
d iQ
dt
(12)
(13)
b)
Rys. 8. Uproszczony schemat obwodu komutacji: a) schemat zastępczy, b) uproszczone przebiegi
prądu i napięcia fazowego przy załączaniu i wyłączaniu
Fig. 8. Simplified scheme of commutation circuit: a) equivalent circuit, b) simplified phase current and
voltage waveforms during switch on and switch off
122
K. Krykowski, G. Siemek, D. Walczak
Komutacyjny spadek napięcia dla przedziału komutacji dla jednej fazy wyniesie
d iQ
u dx = Ls
dt
=
Ud
2
(14)
a jego średnia wartość jest opisana zaleŜnością
tQ
U dx
di
1
= Ls ∫ d d t
Ts 0 d t
(15)
Po zmianie zmiennych i scałkowaniu uzyska się
I
U dx =
d
1
1
Ls ∫ d id = Ls I d
Ts 0
Ts
(16)
ZauwaŜając, Ŝe czas trwania pojedynczego taktu napięcia jest powiązany z prędkością
kątową zaleŜnością
ω=
2π
mpTs
(17)
moŜna wyraŜenie (16) opisujące średni komutacyjny spadek napięcia sprowadzić do postaci
U dx =
mp
ωLs I d
2π
(18)
W zaleŜnościach (17) oraz (18) przez m oznaczono liczbę przełączeń na okres napięcia
zasilającego (dla mostka 3-fazowego m = 6), a przez p liczbę par biegunów. NaleŜy zwrócić
uwagę na formalne podobieństwo zaleŜności (18) z zaleŜnością opisującą średni komutacyjny
spadek napięcia w układach prostowniczych.
W wielu rozwaŜaniach wygodnie jest wprowadzić współczynnik wpływu komutacji,
informujący o relacji pomiędzy komutacyjnym spadkiem napięcia a spadkiem napięcia na
rezystancji obwodu głównego, zdefiniowany jako
kQ =
U dx
UR
(19)
Łącząc zaleŜność (19) z zaleŜnością (16) lub (18) uzyska się wyraŜenia
1 Ls
1 τd
=
Ts 2 Rs 2 Ts
(20)
mp ωLs mp
=
ωτ d
2π 2 Rs 4π
(21)
kQ =
oraz
kQ =
przy czym τd oznacza stałą czasową obwodu głównego silnika.
Po uwzględnieniu komutacyjnego spadku napięcia na indukcyjnościach uzwojeń fazy
wstępującej (B) i zstępującej (A), napięcie i siła elektromotoryczna będą powiązane
zaleŜnością:
U d = U dx + U R + 2 Efp .
(22)
Wpływ indukcyjności na charakterystyki…
123
5. WPŁYW KOMUTACYJNEGO SPADKU NAPIĘCIA NA PRĘDKOŚĆ
OBROTOWĄ
Jeśli wpływ indukcyjności jest zauwaŜalny (rys. 2b), wartość średnia prądu (dla załoŜonej
siły elektromotorycznej) jest mniejsza niŜ w przypadku silnika o pomijalnym wpływie
indukcyjności. Mniejszy jest więc równieŜ moment elektromagnetyczny rozwijany przez
silnik. Jest to spowodowane spadkami napięcia na indukcyjności występującymi w czasie
komutacji.
Łącząc zaleŜności (1), (19) oraz (22) uzyska się dla stanów ustalonych wyraŜenia
U d = 2(1 + k Q )Rs I d + 2 Efp
(23)
oraz
U d − (1 + k Q )Rs
ω=
2 K fp
Me
K fp
.
(24)
Korzystając z zaleŜności (7) oraz (24) przedstawiono na rys. 9 charakterystyki
mechaniczne silnika o pomijalnym wpływie indukcyjności (linia ciągła) oraz silnika,
w którym zachodzi potrzeba uwzględnienia indukcyjności uzwojeń (linia przerywana).
Rys. 9. Charakterystyki mechaniczne silnika PM BLDC: linia ciągła – indukcyjność pomijalna, linia
przerywana – indukcyjność uwzględniona
Fig. 9. Torque-speed characteristics of PM BLDC motor: solid line – inductances neglected, broken
line – inductances taken into account
Występujący w zaleŜności (24) współczynnik wpływu komutacji zaleŜy od aktualnej
prędkości obrotowej. Po podstawieniu (21) do (24) uzyska się zaleŜność
124
K. Krykowski, G. Siemek, D. Walczak
Me
Rs
K fp
.
ω=
1 Me
2 K fp +
Ls mp
π 2 K fp
Ud −
(25)
6. BADANIA SYMULACYJNE I LABORATORYJNE
6.1. Opis stanowiska laboratoryjnego
Schemat poglądowy badanego napędu z silnikiem PM BLDC przedstawiono na rys. 10.
Na rysunku uŜyto następujących oznaczeń:
EC – komutator elektroniczny,
M – badany silnik,
G – prądnica obciąŜająca.
Rys. 10. Schemat ideowy badanego napędu z silnikiem PM BLDC
Fig. 10. Schematic diagram of investigated PM BLDC drive
W badaniach korzystano z seryjnie produkowanego silnika BG75x50 firmy Dunkermotoren o parametrach znamionowych U=24 V, n=3780 obr/min, P=431W, M=1,09 N·m
Ls=0,125 mH Rs=20 mΩ. Podczas badań laboratoryjnych silnik był zasilany z zasilacza
regulowanego, a obciąŜenie stanowił taki sam silnik BG75x50 pracujący generatorowo i
obciąŜony rezystancją. W celu zbadania wpływu indukcyjności na charakterystyki
mechaniczne silnika wprowadzono do układu dodatkowe induktory – La. Indukcyjność tych
induktorów przy małych prądach obciąŜenia wynosiła La’=0,10 mH. Przy większych prądach
rzędu 10 A indukcyjność ta wynosiła natomiast La”=0,065 mH. Całkowita indukcyjność
jednej fazy była opisana zaleŜnością:
L = Ls + La
i wynosiła L’=0,225 mH dla małych prądów oraz L”=0,19 mH dla duŜych prądów.
(26)
Wpływ indukcyjności na charakterystyki…
125
6.2. Model komputerowy
Komputerowy model symulacyjny wykonano w programie Matlab-Simulink. Model
został przedstawiony na rys. 11. Badania symulacyjne wykonano dla rzeczywistych
parametrów silnika, które nieznacznie róŜniły się od danych katalogowych. Oprócz tego
zarówno w modelu komputerowym, jak i w obliczeniach analitycznych uwzględniono
rezystancje zaworów i przewodów doprowadzających.
Sterowanie
Discrete,
Ts = 5e-006 s.
powergui
impulsy
Hall
<Stator current is_a (A)>
ia ea
R
g
Tm
+
A
DC Voltage
Source
Step
<Stator back EMF e_a (V)>
A
m
B
B
N (rpm)
<Rotor speed wm (rad/s)>
C
C
Permanent Magnet
Synchronous Machine
-K-
rad2rpm
T e (N.m)
<Electromagnetic torque Te (N*m)>
Rys. 11. Schemat modelu komputerowego dla oprogramowania Matlab – Simulink
Fig. 11. Computer model diagram, Matlab-Simulink software
6.3. Wyniki wybranych badań symulacyjnych i laboratoryjnych
W celu weryfikacji zaproponowanej metody określania charakterystyk silnika PM BLDC
przeprowadzono obszerne badania laboratoryjne i symulacyjne. W badaniach laboratoryjnych
korzystano z układu przedstawionego na rys. 10, a w badaniach symulacyjnych stosowano
model o strukturze przedstawionej na rys. 11. W badaniach symulacyjnych uwzględniono
rezystancje zaworów i doprowadzeń. Przykładowe wyniki badań wykonane dla napięcia
2
1
zasilania Udn=24 V, Ud= Udn=16 V oraz Ud= Udn=8 V przedstawiono na rys. 12. Punktem
3
3
wyjścia do oceny wyników była charakterystyka mechaniczna silnika obliczona przy
pominięciu indukcyjności, zgodnie z zaleŜnością (7). Przy wyznaczaniu tej charakterystyki
korzystano z rzeczywistych parametrów silnika. Badania wykonano dla układu bez
dodatkowych indukcyjności, gdy całkowita indukcyjność była równa indukcyjności obwodu
głównego silnika i dla układu z dodatkowymi indukcyjnościami La. Moment obciąŜenia
zmieniano przez zmianę wartości rezystancji R stanowiącej obciąŜenie prądnicy G (rys. 10),
w zakresie od około 10% do 140% wartości momentu znamionowego, to znaczy od około
126
K. Krykowski, G. Siemek, D. Walczak
0,13 N·m do 1,53 N·m. Pomiary wykonano dla dwóch wartości indukcyjności fazowych
L=Ls=0,125 mH oraz L’=Ls+La=0,225 mH. Pomierzone charakterystyki zestawiono na rys.
12a z charakterystykami silnika idealnego o pomijalnym wpływie indukcyjności. Dla tych
samych wartości (co w przypadku pomiarów rzeczywistego silnika) napięcia zasilania Ud oraz
parametrów silnika i indukcyjności dodatkowych wyznaczono charakterystyki mechaniczne
na drodze symulacji komputerowej. Charakterystyki te przedstawiono na rys. 12b, i podobnie
jak w przypadku pomiarów laboratoryjnych zestawiono z charakterystyką obliczoną przy
pominięciu wpływu indukcyjności. Na rys. 12c przedstawiono natomiast charakterystyki dla
danych jak na rys. 12a i 12b, lecz wyznaczone teoretycznie na podstawie zaleŜności (25).
a)
b)
c)
Rys. 12. Charakterystyki mechaniczne silnika PM BLDC: przy pominięciu wpływu indukcyjności (1),
bez dodatkowej indukcyjności w obwodzie głównym (2), z dodatkową indukcyjnością
w obwodzie głównym (3)
Fig. 12. Torque-speed characteristics of PM BLDC motor: with inductances neglected (1), with no
additional inductance in main circuit (2), with additional inductance in main circuit (3)
Wpływ indukcyjności na charakterystyki…
127
7. PORÓWNANIE WYNIKÓW OPRACOWANEJ METODY Z WYNIKAMI BADAŃ
SYMULACYJNYCH I LABORATORYJNYCH
Aby ocenić zaproponowaną metodę obliczania komutacyjnych spadków napięcia
i prędkości obrotowej, porównano wyniki obliczeń z wynikami pomiarów i symulacji. Na
rys. 13 przedstawiono charakterystyki mechaniczne badanego silnika PM BLDC bez
dodatkowych indukcyjności w obwodzie głównym wyznaczone róŜnymi metodami,
a mianowicie przedstawiono charakterystykę obliczoną przy pominięciu indukcyjności
obwodu głównego (1), charakterystykę obliczoną przy uwzględnieniu indukcyjności obwodu
głównego (2) i charakterystykę wyznaczoną metodą symulacji (3).
a)
b)
3200
Ud=16 V, L =0,125 mH
3000
1
2800
n [obr/min]
2600
2
3
2400
2200
2000
1800
1600
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
M [N·m]
c)
1600
Ud =8 V, L =0,125 mH
n [obr/min]
1400
3
1200
1
2
1000
800
600
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
M [N·m]
Rys. 13. Charakterystyki mechaniczne silnika PM BLDC: obliczona dla pominiętej indukcyjności
obwodu głównego (1), obliczona przy uwzględnieniu indukcyjności obwodu głównego (2),
wyznaczona w drodze symulacji komputerowej (3). Wyniki pomiarów w układzie
rzeczywistym oznaczono punktami (■)
Fig. 13. Torque-speed characteristics of PM BLDC motor: calculated with main circuit inductance
neglected (1), calculated with main circuit inductance taken into account (2), determined by
computer simulation (3). Real-life measurement results are marked by black squares
Na rys. 13 zaznaczono równieŜ punkty charakterystyki wyznaczonej pomiarowo
w układzie rzeczywistym przedstawionym na rys. 10. Charakterystyki wyznaczono dla trzech
128
K. Krykowski, G. Siemek, D. Walczak
napięć zasilających: Ud=24 V, Ud=16 V, Ud=8 V. RóŜnice prędkości obrotowych dla
charakterystyk (2), (3) oraz dla wyników pomiarów (z wyjątkiem punktu przy obciąŜeniu
1,35 N·m) nie przekraczają dwóch procent. Natomiast róŜnice pomiędzy prędkościami
wyznaczonymi doświadczalnie a prędkością obliczoną przy pominięciu wpływu
indukcyjności (1) są orientacyjnie o rząd większe.
Takie same charakterystyki, dla tych samych napięć zasilających, lecz dla silnika z włączoną w obwód główny dodatkową indukcyjnością, przedstawiono na rys. 14. Liniami
ciągłymi (1), (2), (3) oraz (4) zaznaczono przebiegi charakterystyki: obliczonej przy pominięciu indukcyjności obwodu głównego (1), obliczonej z uwzględnieniem wpływu
indukcyjności: dla załoŜonej indukcyjności L’=0,225 mH (2) i dla załoŜonej indukcyjności
L”=0,19 mH (4) oraz uzyskanej w wyniku symulacji (3). Widoczne na wykresach symbole
(■) odpowiadają natomiast pomierzonym punktom charakterystyki mechanicznej
rzeczywistego silnika.
a)
b)
3200
4800
Ud=24 V, L' =0,225 mH, L" =0,19 mH
4600
4400
Ud =16 V, L' =0,225 mH, L" =0,19 mH
3000
1
1
2800
4200
4000
n [obr/min]
2600
3800
4
3600
3400
3
2400
3
2
2
4
2200
3200
2000
3000
2800
1800
2600
1600
2400
0,0
0,2
0,4
0,6
0,8
M [N·m]
1,0
1,2
1,4
1,6
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
M [N·m]
c)
Rys. 14. Charakterystyki mechaniczne silnika z dodatkową indukcyjnością w obwodzie głównym:
obliczona przy pominięciu indukcyjności obwodu głównego (1), obliczona dla indukcyjności
fazowej L’ (2), symulacyjna (3), obliczona dla indukcyjności fazowej L” (4), punkty
pomierzone (■)
Fig. 14. Torque-speed characteristics of motor with additional inductance in main circuit: calculated
with main circuit inductance neglected (1), calculated with phase inductance L’ (2),
determined by computer simulation (3), calculated with phase inductance L” (4). Real-life
measurement results are marked by black squares (■)
Wpływ indukcyjności na charakterystyki…
129
W układzie z dodatkową indukcyjnością dla małych obciąŜeń (do 0,5 N·m) punkty
pomiarowe są w przybliŜeniu takie jak dla charakterystyki (2) obliczonej dla indukcyjności
dławika dodatkowego La wyznaczonej dla małych prądów. Dla większych obciąŜeń (>0,5
N·m) punkty pomiarowe są natomiast usytuowane tak jak w przypadku charakterystyki (4)
obliczonej dla indukcyjności dodatkowej La określonej dla duŜych prądów.
8. PODSUMOWANIE. WNIOSKI KOŃCOWE
W
artykule
przedstawiono
analityczną
metodę wyznaczania charakterystyk
mechanicznych silnika PM BLDC. Metoda została zweryfikowana symulacyjnie
i eksperymentalnie. NajwaŜniejsze wnioski wynikające z przeprowadzonych rozwaŜań oraz
badań symulacyjnych i eksperymentalnych zestawiono poniŜej w punktach.
1. Przełączanie zaworów komutatora elektronicznego, a przez to uzwojeń fazowych silnika
powoduje pojawienie się dodatkowych komutacyjnych spadków napięcia.
2. Komutacyjne spadki napięcia powodują między innymi zmniejszenie prędkości obrotowej
silnika.
3. Komutacyjne spadki napięcia są proporcjonalne do indukcyjności obwodów głównych
silnika oraz jego prędkości obrotowej i moŜna je wyznaczyć korzystając z zaleŜności (18).
4. Po wprowadzeniu wyraŜenia określającego komutacyjny spadek napięcia do zaleŜności
opisującej prędkość obrotową uzyska się zaleŜności (24) oraz (25), pozwalające
wyznaczyć prędkość obrotową silnika ze znacznie większą dokładnością niŜ powszechnie
stosowane zaleŜności, pomijające wpływ indukcyjności.
5. Przedstawiona w artykule nowa metoda wyznaczania komutacyjnego spadku napięcia
daje dobre odwzorowanie jego wpływu na prędkość obrotową i charakterystyki
mechaniczne.
6. W rzeczywistych silnikach indukcyjność uzwojeń bywa nieliniowa, w tej sytuacji
dokładne określenie spadku prędkości obrotowej wymaga wprowadzenia w odpowiednich
zaleŜnościach indukcyjności odpowiadającej zadanemu prądowi obciąŜenia.
BIBLIOGRAFIA
1. Glinka T.: Maszyny elektryczne wzbudzane magnesami trwałymi. Wydawnictwo
Politechniki Śląskiej. Gliwice 2002.
2. Dudzikowski I., Pawlaczyk L.: Maszyny prądu stałego o magnesach trwałych i ich
sterowanie – stan aktualny i perspektywy rozwoju. Zeszyty Naukowe Politechniki
Śląskiej s. “Elektryka” z 176, Gliwice 2001, s. 59–78.
130
K. Krykowski, G. Siemek, D. Walczak
3. Krishnan R.: Electric Motor Drives, Modelling, Analysis and Control. Prentice Hall, New
Jersey 2001.
4. Krykowski K., Domoracki A.: Metoda wyznaczania charakterystyki mechanicznej
bezszczotkowego silnika prądu stałego. Kwartalnik „Elektryka” 2007, z. 4 (204), s. 79-88.
5. Krykowski K.: Silnik PM BLDC – analiza, właściwości, symulacja, sterowanie. Materiały
niepublikowane przygotowane do druku.
6. Miller T. J. E.: Brushless permanent and reluctance motor drives. Oxford 1989.
Recenzent: Dr hab. inŜ. Roman Muszyński, prof. Polit. Poznańskiej
Wpłynęło do Redakcji dnia 17 października 2010 r.
Abstract
When phase windings of brushless dc motors are switched over, additional voltage drops
across main circuit inductances arise. If these voltages are neglected, which is common
practice, the calculated speeds are higher than speeds actually measured in real PM BLDC
motor. The paper presents analytical method of determining torque-speed characteristic of PM
BLDC motor; this method is much more accurate than usually adopted procedure neglecting
inductances impact. Several simplifying assumptions have been adopted. The most important
is that current is constant in the phase which does not take part in commutation process. This
assumption has made it possible to obtain relatively simple formulas defining commutation
voltage drops. The average commutation voltage drop value obtained during analysis is
proportional to main circuit inductance and motor’s rotational speed. If this average
commutation voltage value is introduced into formula describing rotational speed of the motor
with negligible inductance impact, the rotational speed of motor with significant inductance
impact can be determined. Correctness of the proposed method has been verified with
laboratory and computer simulation tests (Matlab/Simulink software has been used). Results
justify application of this method. It has been observed that drop in rotational speed due to
commutation and calculated with the help of proposed method is computed much more
accurately than when using simplified formulas, which neglect the influence of inductance on
rotational speed.