ĆWICZENIE NR
POMIAR TEMPERATURY MEOTODAMI
ELEKTRYCZNYMI
25.1. Cel ćwiczenia
Celem ćwiczenia jest ocena przydatności wybranych termometrów
elektrycznych do pomiaru temperatur zmiennych w czasie.
25.2.Teoretyczne podstawy pomiaru temperatury metodami
elektrycznymi
Wprowadzenie. Skale temperatur
Elektryczny pomiar temperatury jest najczęściej spotykanym pomiarem
wielkości nieelektrycznej przeprowadzanym metodą elektryczną. Temperatura
jest tą wielkością fizyczną, która wpływa na przebieg procesów fizycznych i
chemicznych, jest używaną do monitorowania środowiska i jego elementów,
może być parametrem świadczącym o stanie technicznym maszyn i urządzeń,
poprawności ich pracy. Pod wpływem temperatury zmieniają się parametry
materiałów, przyrządów i narzędzi pomiarowych, co może być źródłem
istotnych zakłóceń w pomiarach o charakterze zdeterminowanym i
niezderminowanym, zarówno w pomiarach statycznych jak i dynamicznych.
Temperatura jest fizyczną wielkością charakteryzującą stan równowagi
termodynamicznej układu makroskopowego. Wg. Definicji J.C. Maxewell’a
temperatura ciała jest jego cieplnym stanem, będącym miarą zdolności do
przekazywania ciepła innym ciałom. Oznacza to, że ciała cieplejsze oddają
ciepło chłodniejszym, a chłodniejsze przejmują ciepło od cieplejszych czyli w
układach niezrównoważonych termodynamicznie energia przechodzi od ciał o
wyższej temperaturze do ciał o niższej temperaturze, natomiast w stanie
równowagi termodynamicznej wszystkie części układu, charakteryzują się
jednakową temperaturą.
373
Jednostką temperatury w układzie SI jest Kelvin (K), który według
międzynarodowej skali temperatur (MST-90) przyjętej w roku 1990 jest
określany jako 1/273,16 temperatury termodynamicznej punktu potrójnego
wody.
Temperatura Celcjusza t jest określana zależnością
t ( o C ) T ( K ) 273,15
( 25.1)
W międzynarodowej skali temperatur MST-90 punkt potrójny wody
(mieszanina nasyconej pary, wody i lodu) ma temperaturę 0,01o C , stąd
zależność pomiędzy międzynarodową temperaturą Kelwina i międzynarodową
temperaturą Celcjusza jest następująca
t 90 ( o C ) T90 ( K ) 273,15
( 25.2)
MST-90 definiuje punkty stałe, którym przyporządkowane są wartości
temperatur, których używa się do wyznaczania skal termometrów.
Stan równowagi
Przyporządkowane
T90 [ K ]
Cisnienie pary helu (zalezność funkcyjna)
Punkt potrójny wodoru w równowadze
Punkt wrzenia wodoru pod ciśnieniem 33 330,6 Pa
Punkt wrzenia wodoru przy okreslonym ciśnieniu
Punkt potrójny neonu
Punkt potrójny tlenu
Punkt potrójny argonu
Punkt potrójny rtęci
Punkt potrójny wody
Punkt topnienia galu
Punkt krzepnięcia indu
Punkt krzepnięcia cyny
Punkt krzepnięcia cynku
Punkt krzepnięcia aluminium
Punkt krzepnięcia srebra
Punkt krzepnięcia złota
Punkt krzepnięcia miedzi
3 do 5
13,8033
17
20,3
24,5561
54,3584
83,8058
234,3156
273,16
302,9146
429,7485
505,078
692,677
933,473
1234,93
1337.33
1357.77
Tabela 25.1
Wartości
temperatur
t 90 [ o C ]
-270,15 do
–268,19
-259,346
-256,15
-252,58
-248,5939
-218,7916
-189,3442
-38,8344
0,01
29,7646
156,5985
231,928
419,527
660,323
961,18
1064,18
1084,62
W tabeli 25.1 podano punkty stałe wykorzystywane do skalowania
termometrów wg ITS-90 (International Temperature Scale). W tabeli tej poza
374
punktami potrójnymi wartości temperatury, odpowiadają temperaturze przy
ciśnieniu p0 = 101325 Pa.
Termometr jest urządzeniem do pomiaru temperatury, wykorzystującym do
tego celu różne zjawiska fizyczne i właściwości materiałów. Zamiana
termicznej formy energii w inną jej formę jak: chemiczną. optyczną,
mechaniczną, elektryczną, molekularną, akustyczną lub nuklearną jest podstawą
działania czujników temperatury (sensorów), które stanowią pierwszy element
systemu pomiarowego.
W
technice,
powszechnie
znane
są
termometry
cieczowe
(rozszerzalnościowe), pirometryczne (radiacyjne), gazowe (zależność ciśnienia i
objętości) oraz elektryczne z sensorami rezystancyjnymi, półprzewodnikowymi
i termoelektrycznymi (termoparami).
Termometry rozszerzalnościowe - w zależności od rodzaju ośrodka
poddawanego działaniu temperatury - mogą mierzyć temperaturę w zakresie
200o C 500o C z największą, w specjalnych wykonaniach, czułością
0,01o C (termometr Beckmanna).
Najczęściej stosowanymi sensorami w termometrach elektrycznych są:
- rezystory termometryczne (rezystancja opornika zmienia się wraz z
temperaturą),
- termoelementy (zjawisko powstawania siły termoelektrycznej),
- termistory NTC (rezystancją materiału półprzewodnikowego maleje wraz ze
wzrostem temperatury),
- silistory (krzemowe których rezystancja zwieksza się z temperaturą),
- diodowe i tranzystorowe, (charakterystyki prąd/napięcie zależą od
temperatury).
Termometry rezystancyjne
Sensorami w termometrach rezystancyjnych są rezystory metalowe,
uzwajane lub warstwowe, zmieniające swoją rezystancję wraz z mierzoną
temperaturą.
Metale, których używa się do budowy sensorów powinny spełniać następujące
wymagania:
znaczna zmiana rezystancji przy zmianie temperatury, czyli powinny być
wrażliwe na zmianę temperatury,
duża rezystywność materiału, która umożliwia konstruowanie sensorów o
małych gabarytach,
stałość parametrów fizykochemicznych w czasie i przy zmianach
temperatury,
duża odporność na wysokie temperatury,
375
łatwość odtwarzania sensorów o tych samych parametrach,
liniowa zależność rezystancji od temperatury oraz brak histerezy.
Nie ma materiałów w pełni spełniających powyższe wymagania, ale
materiałami, których właściwości zbliżają się do powyższych wymagań są:
nikiel ( 60 o C 150 o C ),
miedź ( 50 o C 150 o C ),
stop Balco,Rh-Fe ( 200 o C 200 o C ),
a przede wszystkim platyna ( 200 o C 850 o C ),.
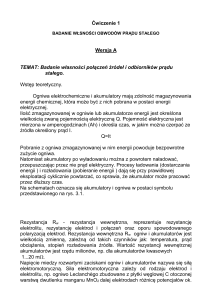
Na rys 25.1 przedstawiono stosunek rezystancji RT do R0 w funkcji
temperatury.
Stop Balco
Miedź
Nikiel
Platyna
o
Temperatura C
Rys.25.1 Charakterystyki termometryczne niklu, stopu balco, miedzi i platyny
w funkcji temperatury
W niniejszym ćwiczeniu, temperatura Celcjusza, jest oznaczana również
literą (chociaż czasami T) w celu uniknięcia podobieństw do czasu t .
Oznaczenie temperatury Celcjusza literą jest zgodne z polską Normą
„Ciepło” [PN-61/N 011109].
376
Zakładając przypadek ogólny, gdy rezystancja sensora RT f ( ) zmienia
się z temperaturą, korzystając ze wzoru Tylora można napisać
1 R
1
1
R
2
!
R0
0
0
RT R0
1 nR
n
...
n
n
!
R
0
0
2R
2
2
0
(25.3)
gdzie:
RT - rezystancja w temperaturze ,
R0 - rezystancja w temperaturze 0 0 C
Zależność zmiany rezystancji platyny w funkcji temperatury można opisać
zależnością
(25.4)
RT R0 1 A B 2 C 3
gdzie współczynniki A, B, C wyznacza się z zależności
A
1 R
R0 0
B
1
2! R0
C
1
3! R0
2R
2
0
3R
3
0
( 25.5)
( 25.6)
(25.7)
W przybliżeniu można przyjąć, że
RT R0 1 Δ
Dla platyny współczynnik = 0,385, dla niklu = 0,617, dla miedzi = 0,426,
a dla Rh-Fe = 0,379; jest różnicą temperatur , R0 jest rezystancją w
temperaturze 0 o C .
Do pomiaru rezystancji w tej grupie sensorów stosuje się stabilne źródła
prądowe, układy napięciowe z dzielnikiem, układy mostkowe odchyłowe i
zerowe typowe dla danego zakresu zmian rezystancji.
377
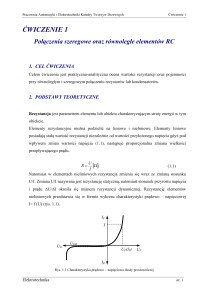
Na rysunku 25.2 przedstawiono
rezystancyjnych czujników platynowych.
przedstawiono
Rys. 25.2. Struktury czujników rezystancyjnych
różne
struktury
378
Termometry termistorowe
W półprzewodnikowych sensorach temperatury wykorzystuje się silną
zależność zmiany gęstości i ruchliwości nośników w funkcji temperatury.
Zależność (25.8) przedstawia zmianę rezystancji RT termistora od temperatury
T wyrażonej w Kelwinach.
RT RTref e
1
1
B
T Tref
(25.8)
gdzie:
Rref - jest rezystancja termistora w temperaturze odniesienia Tref ,
B - stała w Kelwinach zależna od materiału termistora,
T - bieżąca temperatura w Kelwinach.
Z równania (25.8) można określić czułości termistora, zmieniająca się wraz ze
zmianą, temperatury, poprzez zdefiniowanie temperaturowego współczynnika
rezystancji T , jako
1 dRT
B
(25.9)
T
2
RT dT
T
Z równania (25.9) wynika zależność współczynnika T , od temperatury,
czułość ta maleje wraz ze wzrostem temperatury. Współczynnik czułości , ref
jest wyrażany w %/K.
Wzór (25.8) można zapisać w często spotykanej formie (25.10)
RT RTref e
Tref
Tref T
T
( 25.10)
gdzie:
Tref - cieplny współczynnik zmiany rezystancji termistora w temperaturze
odniesienia Tref ,
T = T - Tref - jest różnicą temperatur.
Do pomiaru temperatur stosuje się prawie wyłącznie termistory o ujemnym
cieplnym współczynniku zmian rezystancji (NTC – Negative Temperaure
Coeeficient). Te o współczynniku dodatnim (PTC – Positive Temperaure
Coeeficient) stosuje się do sygnalizatorów przekroczenia pewnych temperatur.
Właściwości termistorów zależą od ich składu. Dla zastosowań w zakresie
temperatur: -50 oC to +200 oC, wszystkie typy termistorów zawierają Mn i Ni.
379
Procentowa zmiana zawartość komponentów Co i Cu powoduje zmianę
rezystywności właściwej wzakresie od 10 .cm do 105 .cm przy jednoczesnej
zmianie współczynnika B od 2580 K do 4600 K. W temperaturze odniesienia
293 K, wartość T zawiera się w granicach -2 %/K do -6 %/K. Ze względu na
przemianę fazową materiałów z których wykonuje się termistory NTC,
zachodzącą w tempertaurze niewiele ponad 500 oC, termometry termistorowe
wykonuje się do temperatury ok. 500 oC, aczkolwiek z materiałów ziem
rzadkich zakres pomiaru termometrami termistorowymi można rozszerzyć do
ok. 1500 oC.
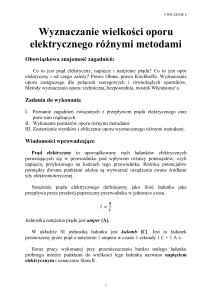
Układy pomiarowe stosowane z sensorami termistorowymi są analogiczne do
tych przy pomiarach z termorezystorami. Różne rozwiązania konstrukcyjne
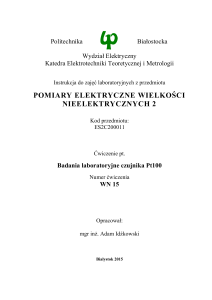
termistorów przedstawiono na rys. 25.3. Na rys. 25.4 przedstawiono zależność
stosunku rezystancji RT/RTREF w funkcji temperatury w oC dla różnych
materiałów.
a) pereіkowy
b) pereіkowy oblany
szkіem lub plastkiem
d) precikowy 1
c) pіytkowy
e) bagietkowy
Rys. 25.3. Różne rozwiązania wykonań termistorów
380
Rezystancja wzglкdna (RT/RTREF)
, 1 k
o
silist
TD
r Si-R
Pt-RTD,
Pt-100
Tr
NTC termistor
-3.0 %/K
-3.5 %/K
-3.8 %/K
-4.0 %/K
-4.6 %/K
-5.0 %/K
-5.4 %/K
Temperatura, oC
Rys. 25.4. Stosunek rezystancji, RT/ RTREF , w funkcji temperatury wyrażonej w
o
C dla róznych
matetriałów. Tref = 293 K (20 C)
Termometry termoelektryczne
Dużą grupę termometrów stanowią urządzenia do pomiaru temperatury z
sensorami termoelektrycznymi. Pomiędzy dwoma różnymi metalami lub
stopami metali, złączonymi ze sobą, na ich styku powstaje różnica potencjałów,
która jest wyrażona zależnością
kT N A
(25.11)
VAB A B
ln
q
NB
381
gdzie:
A i B – poziomy Fermiego w metalu A i B,
N A i N B - liczba swobodnych elektronów w jednostce objętości każdego z
metali,
k - stała Boltzmann's,
q - ładunek elektronu,
T – temperatura.
Gdy dwa różne metale są połączone ze sobą, w tej samej temperaturze ( T0 T1 ),
suma różnicy potencjałów jest zerowa
V AB (T0 ) V BA (T0 ) 0
(25.12)
Rys. 25.5. Obwód składający się z dwóch różnych metali, których jedno złącze jest
w temperaturze T1 a drugie złącze w
T2 (T1 T2 )
Jeżeli T0 T1, w obwodzie powstaje różnica potencjałów nazywana siłą
termoelektryczną Peltier'a wyrażoną równaniem
E P V AB (T1 ) VBA (T0 )
N
k
(T1 T0 ) ln A
q
NB
(25.13)
Jednocześnie w takim obwodzie istnieje siła termoelektryczna wynikająca z
efektu Thomsona, czyli powstająca pod wpływem gradientu temperatur
wolnych elektronów w jednorodnym materiale przewodzącym. Siła
termoelektryczna Thomsona jest opisana zależnością
ET ( A B )(T1 T0 )
(25.14)
382
gdzie:
A i B - współczynniki Thomsona, zależne od materiału.
Ze względu na fakt, że obie siły termoelektryczne Peltier i Thompsona
występują jednocześnie (sumowanie algebraiczne), można wyrazić je jako
funkcje różnicy temperatur
E E P ET f (T1 T0 )
(25.15)
Rys 25.6. Miliwoltomierz podłączony do obwodów termopar A i B
oraz włączonym trzecim metalem C
Po włączeniu w obwód urządzenia do pomiaru siły termoelektrycznej (rys.
25.6), zgodnie z równaniem (25.15) jego wskazanie będzie zależeć do różnicy
temperatur. Jest to zależność paraboliczna z małym „wygięciem”, tak więc
czasami można uważać że jest to zależnośc wprost proporcjonalna. Jeżeli jedna
z temperatur będzie znana, wówczas wartość siły termoelektrycznej będzie
funkcją temperatury drugiej, nieznanej. Jeżeli temperaturę T0 nazwiemy
temperaturą odniesienia i jest ona nam znana (np. 273 K), złącze to będziemy
nazywać złączem odniesienia. Temperatura T1 jest temperaturą mierzoną.
Istnieją dwie możliwości włączenia miernika siły termoelektrycznej, tak jak
pokazano na rys 25.6, tj. poprzez przewód oznaczony literą „C” do miejsca
umieszczenia złącz termoelementu w temperaturze odniesienia lub w dowolnym
miejscu po przecięciu przewodu „B” termoelementu. Rodzaj przewodu „C” nie
będzie odgrywał roli o ile podłączy się go do złącza jak na rys 25.6 a i b.
383
W wielu przypadkach nie jest możliwe zapewnienie stałej temperatury
wolnych końców spoiny pomiarowej, gdyż odległość spoiny pomiarowej i
wolnych końców termopary jest zbyt mała. Należy wówczas stosować
przewody wykonane ze specjalnego, dobranego do danej termopary materiału,
zwane przewodami kompensacyjnymi. Nie byłoby ekonomiczne wykonanie np.
termopary platynowej z końcami długości kilkunastu metrów i o
charakterystyce termometrycznej identycznej z charakterystyką termometryczną
termoelementu.
W rzeczywistych układach pomiarowych jedno złącze (pomiarowe) musi
być umieszczone w temperaturze mierzonej T1 , a drugie złącze odniesienia w
temperaturze T0 . W precyzyjnych pomiarach wolne końce termoelementu są
umieszczane w temperaturze odniesienia równej 273,15 K, (potrójny punkt
wody) znajdującej się w pewnej odległości od punktu pomiarowego.
Rys. 25.7. Pomiar temperatury z wykorzystaniem przewodów kompensacyjnych
Możliwe jest wykorzystanie temperatury odniesienia innej niż temperatura
puktu potrójnego wody 273,15 K, ale wówczas należy uwzględnić poprawki
wynikajace z tej różnicy. Na rysunku 25.7 zilustrowano graficznie sposób
uwzględniania takiej poprawki.
Rozważmy przypadek, gdy temperaturę odniesienia T0 n , zastępuje inna
temperatura odniesienia T01 . Zakładamy, że T01 > T 0 n . W celu uwzględnienia
poprawki wynikającej z innej temperatury odniesienia niż ta, którą
przewidziano podczas nadawania skali pomiarowej, należy uwzględnić
poprawkę E1 , by uzyskać nową skorygowaną wartość, T m1 ( rys 25.8).
384
E
E1m
E2 E1
E0m
E2m
E01
E2 E1
E0n
T
E02
T02
T0n
T01
T2m
T0m
T1m
Rys. 25.8. Korekcja wskazań temperatury wynikająca
z temperatury odniesienia różnej od
T0 n
Siła termoelektryczna E 0 n odpowiada temperaturze odniesienia T0 n , a E 01
odpowiada T01 . Korekcja wynosi E1 E01 E0 n . Załóżmy, że mierzona siła
termoelektryczna wynosi E 0 m , co odpowiada pozornie mierzonej temperaturze
T0 m . Ta pozorna temperatura musi być skorygowana poprzez wartość
odpowiadającą korekcji E1 E 01 E 0n wynikającą z różnic w
temperaturach odniesienia. Należy do wartości E 0 m dodać wartość E by
uzyskać temperaturę skorygowaną T1m . Analogicznie postępuje się, gdy
temperatura odniesienia spełnia zależność T 0 < T0n (rys. 25.8).
W wielu przypadkach do pomiaru sił termoelektrycznych używa się
kompensatorów prądu stałego, lub millivoltomierzy o dużej rezystancji
wejściowej z odczytem analogowym lub cyfrowym i z wbudowaną funkcą
linearyzującą charakterystykę E=f(T).
Korzystając z powyższych rozważań, jest możliwe zaprojektowanie
obwodu, który będzie zapewniał korekcję przy temperaturze odniesienia T0
równej temperaturze otoczenia, niezależnie od jej wartości. Taki układ
mostkowy realizujący korekcję jest przedstawiony na rys 25.9. W mostku tym
przewody termoelementu A i B są podłączone za pomocą przewodów
kompensacyjnych A’ i B’. Do wartości siły termoelektrycznej E dodaje się
napięcie niezrównoważenia mostka U N , które stanowi napięcie korekcji
zmieniające się wraz ze zmianą temperatury otoczenia, gdyż w jednej z gałęzi
385
umieszczony jest opornik termometryczny RT , a w pozostałych trzech gałęziach
mostka są oporniki o rezystancji R i o małym temperaturowym współczynniku.
Napięcie zasilające mostek Us nie zależy od temperatury otoczenia.
B
B'
T1
T0
E
A
E + UN
R
R
A'
UN
RT
R
Uzas.
Rys.25.9. Kompensacja wolnych końców termopary niezależnie od temperatury zewnętrznej
Siły termoelektryczne metali lub stopów metali względem platyny, w
odniesieniu do platyny w temperaturze 100 oC, zestawiono w tabeli 25.2.
Metal
Nikiel
Kobalt
Pallad
Platyna
Aluminium
Ołów
Platyna-rod
(90 % Pt, 10 % Rh)
Iryd
rod
Siła termoelektryczna
w mV
-1,48
-1,33
-0,57
0
+0,42
+0,44
+0,643
+0,65
+0,70
Metal
srebro
cynk
Tabela 25.2
Siła
termoelektryczna
w mV
+0,74
+0,76
miedź
złoto
wolfram
molibden
żelazo
+0,76
+0,78
+1,12
+1,45
+1,89
Nikielchrom
(85 % Ni, 12 % Cr)
+2,81
386
mV
E
nikiel-chrom (chromel)
30
miedџ
ї elazo
platyna-10% rod
20
10
platyna
0
nikiel-aluminium (alumel)
-10
pallad
-20
Nikiel
miedџ-nikiel (konstantan)
T
-30
73 273
673
1073
1473
K
Rys. 25.10. Siły termoelektryczne różnych termopar w odniesieniu do platyny
Zależność siły termoelektrycznej od temperatury wyznacza się doświadczalnie;
jest ona różna dla różnych materiałów. W małym zakresie temperatur można
przyjąć, że jest to zależność liniowa, ogólnie jednak
E a T b T 2
(25.15)
gdzie:
a i b - współczynniki zależne od rodzaju użytych materiałów,
T - różnica temperatur między wolnymi końcami i spoiną pomiarową.
Największa, dopuszczalna dla danej spoiny temperatura, zależy od rodzaju
materiałów. W tabeli 25.3 zestawiono parametry różnych typów
termoelementów o znormalizowanych charakterystykach termometrycznych
w/g PN-EN 60548 (IEC 584).
387
Rodzaj termopary
typ
Platyna –10 % rod / platyna
Platyna – 13 % rod / platyna
Platyna – 13 % rod / platyna – 6 % rod
Żelazo / miedź-nikiel
Miedź / miedź - nikiel
Nikiel-chrom / miedź-nikiel
S (Pt Rh 10 - Pt)
R (PtRh13 - Pt
R (PtRh13 - Pt
J (Fe - CuNi)
T (Cu - CuNi)
E (NiCr – CuNi)
Nikiel-chrom / nikiel-aluminium
Nikiel-chrom-krzem / nikiel-krzem
K (NiCr - NiAl)
N (NiCrSi – NiSi)
Tabela 25.3
o
Zakres pracy w C
ciągły
1300
1300
1300
600
-200500
-200900
1000
1000
dorywczy
1600
1600
1600
1000
-200500
2001000
1200
1200
Na rys. 25.9 rezystor R1 w mostku Wheatstone'a jest wykonany z drutu
miedzianego. Miedź posiada dość znaczny współczynnik temperaturowy
rezystancji; pozostałe elementy mostka nie zmieniają rezystancji w tak dużym
stopniu. Jeżeli temperatura otoczenia, a więc i temperatura, w której znajdują się
elementy mostka, jest równa 0oC, wówczas mostek znajduje się w równowadze,
w związku z czym napięcie na zaciskach CD jest równe zeru. Jeżeli temperatura
otoczenia wzrasta, wówczas zmienia się wartość rezystancji R1 i mostek nie jest
w równowadze, więc na zaciskach CD pojawia się pewne napięcie, które dodaje
się do napięcia powstałego na spoinie pomiarowej. W temperaturze 20oC
wartość tego napięcia jest równa +0,63 mV. Sonda posiada własne źródło
zasilania mostka Wheatstone'a w postaci wbudowanej baterii rtęciowej o
napięciu około 1,1 V.
Szczególnie duże wartości siły termoelektrycznej można otrzymać przez
zastosowanie półprzewodników. Jednak z powodu starzenia się i niejednolitości
charakterystyk termopar półprzewodnikowych nie są one używane w technice
pomiarowej. Są stosowane jako przetworniki energii cieplnej w elektryczną i
elektrycznej w cieplną, zwłaszcza w chłodziarkach (wykorzystanie zjawiska
Peltiera).
Właściwości dynamiczne i modelowanie termometrów
Właściwości dynamiczne termometrów określają ich zachowanie się przy
pomiarach temperatur zmiennych w czasie. Błędy dynamiczne w pomiarach
temperatur są określane na podstawie znajomości właściwości dynamicznych
termometrów.
Na podstawie znajomości właściwości dynamicznych termometrów można
388
wyznaczyć:
- błędy dynamiczne i przebiegi rzeczywiste mierzonej temperatury,
- czas ustalania się wskazań termometru przy zmianie temperatury oraz
dokonać doboru korektorów do korekcji błędów dynamicznych.
We współczesnych termometrach elektrycznych sensory decydują o
właściwościach dynamicznych termometru, tak więc można mówić o dynamice
sensorów, a przez to rozumie się dynamikę termometrów.
Sensor idealny
Idealny sensor temperatury jest elementem inercyjnym pierwszego rzędu. W
celu udowodnienia tego stwierdzenia, rozważmy wyidealizowany czujnik
temperatury. Zakłada się że sensor jest wykonany jako jednorodny walec
cylindryczny z jednorodnego materiału i jednakowych właściwościach we
wszystkich kierunkach. Jest on wykonany z materiału o nieskończenie dużej
przewodności cieplnej, ma masę m, ciepło właściwe c i powierzchnie wymiany
ciepła A. Zakłada się, że sensor jest całkowicie zanurzony w medium, którego
temperaturę mierzymy, i zakładamy, że nie zachodzi wymiana ciepła z żadnym
innym ośrodkiem o innej temperaturze. Zakłada się, że pojemność cieplna
sensora m c jest pomijalnie mała w stosunku do pojemności cieplnej medium
oraz że współczynnik przejmowania ciepła miedzy czujnikiem a ośrodkiem
badanym ma stałą wartość.
W celu napisania równania różniczkowego dla określenia modelu posłużymy
się metoda bilansu cieplnego. W chwili czasowej t = 0-, (nieskończenie mały
czas przed chwilą zerową), załóżmy, że sensor ma ustalony stan termiczny z
temperaturą początkową T, równą temperaturze otoczenia a. Gdy t = 0,
zanurzamy sensor w medium o temperaturze > a. Oznaczając
nadtemperaturę (przyrost temperatury ponad temperaturę otoczenia) przez ,
można zapisać warunki początkowe dla t = 0, tak więc nadtemperatura ma
wartość
T (0-) = T(0-) - a(0-) = 0 i = - a > 0
(25.16)
Po zanurzeniu sensora w badanym medium, zgodnie z prawem Newtona ilość
ciepła dQt przekazanego do sensora w jednostce czasu dt wyniesie
dQt A T dt
(25.17)
gdzie:
Q - współczynnik przejmowania ciepła miedzy czujnikiem z badanym medium,
389
A - pole wymiany ciepła.
Ciepło zgromadzone w sensorze jest wyrażone zależnością
dQs mcd T
(25.18)
różniczkując równanie (25.17) po czasie otrzymuje się
dQs mcdT
dt
dt
(25.19)
gdzie m i c są zdefiniowane jak powyżej.
Równowaga bilansu cieplnego. Z prawa zachowania równowagi ciepła
dQt dQ s tak więc otrzymujemy
mc
dT
AT A
dt
(25.20)
Definiując stałą czasowa sensora jako
NT
mc
A
(25.21)
można zapisać równanie (25.20) jako
NT
dT
T
dt
(25.22)
Poprzez analogie do obwodu elektrycznego R-C równanie (25.21) może być
zamodelowane jak na rys 25.11. Temperatura sensora T, odpowiada napięciu
U T z wejściowym skokiem temperatury, , analogicznie jak skok napięcia U.
Pojemność elektryczna C modelu odpowiada pojemności cieplnej (mc) sensora
podczas, gdy rezystancja elektryczna R, modelu odpowiada termicznej
rezystancji, 1 A , pomiędzy warstwa zewnętrzna sensora i powierzchnią
medium, w którym znajduje się sensor.
Taki wyidealizowany sensor jest elementem inercyjnym pierwszego rzędu.
390
R=1/(A)
u(t)
U
C=cwm
Rys 25.11 . Analowy schemat zastepczy termometru idealnego
R- rezystancja zastępcza,, - współczynnik przenikania ciepła, A _ pole powierzchni przejmowania
ciepła, m- masa czujnika - temperatura ośrodka, T – temperatura bieżąca: U- wartość
napięcia, u(t) – wartość chwilowa napięcia
Rzeczywiste charakterystyki sensorów temperatury
Rzeczywiste modele sensorów temperatury (termometrów) mogą różnić się
od zaproponowanego modelu jako elementu inercyjnego pierwszego rzędu.
Jednakże w wielu zastosowaniach jest to wystarczające przybliżenie.
Szczegółowy opis rzeczywistych modeli czujników temperatury można znaleźć
w książce [1] oraz [2].
Poprzez wyznaczenie stosunku czasów, po których czujniki temperatury o
kształcie cylindrycznym osiągają 50 % i 90% skoku amplitudy temperatury, jest
możliwe określenie czy jest to:
a) czujnik działania objętościowego, ( t 0,9 / t 0,5 3,32 ),
b) czujnik działania objętościowego t 0,9 / t 0,5 3,32 ,
c) czujnik działania środkowego t 0,9 / t 0,5 3,32 .
Różnice w odpowiedziach czasowych tych 3-ech rodzajów termometrów
zilustrowano na rys. 25.12. Charakter przebiegów zmian wskazań w czasie jest
związany z procesem przepływu i rozchodzenia się ciepła w całym czujniku.
Wnikanie ciepła do części sensorycznej (1) czujnika, odbywa się poprzez
obudowę czujnika (2) i materiał izolacyjny (izolacja elektryczna) (3) .
W przypadku czujnika o działaniu powierzchniowym, następuje najszybsza
391
temperatura T
reakcja na zmiany temperatury, gdyż cała powierzchnia części sensorycznej
przejmuje wnikające ciepło. Wolniejszej reakcji na zmiany temperatury można
spodziewać się w czujnikach o działaniu objętościowym, gdyż cała objętość
musi przejąć dopływające ciepło. Ten rodzaj czujnika jest najbardziej zbliżony
do modelu idealnego.
W przypadku termometrów z czujnikami działania środkowego, ciepło z
pewnym opóźnieniem wnika poprzez obudowę zewnętrzną i materiał
izolacyjny, stąd zauważalne na wykresie spowolnienia narastania temperatury w
początkowej części odpowiedzi.
1-część sensoryczna
2-obudowa zewnętrzna
3-materiał izolacyjny
Typ działania
czujnika
środkowy
objętościowy
powierzchniowy
struktura
1
t0,9/t0,5
2
<3,32
1
1
3,32
3
>3,32
czas t
Rys 25.12. Odpowiedzi na skok jednostkowy 3 rodzajów termometrów
392
25.3.Wykonanie ćwiczenia
25.3.1. Wyznaczanie stałych czasowych czujników temperatury
Układ połączeń
Schemat układu pomiarowego jest na rysunku 25.13.
Rys. 25.13. Układ połączeń do wyznaczania stałych czasowych temperatury
393
Oznaczenia
THg - termometr rtęciowy,
TT - NTC (Negative Temperature Coefficient) przetwornik termistorowy
podłączony do Mul_1,
TR - Pt-100, przetwornik rezystancyjny (RTD), (podłączony do Mul_2),
TE -termoelement 1 podłączony do miliwoltomierza ,
TE -termoelement 2 podłączony do miliwoltomierza,
Mul_1 – mulitimeter 1 pracujący na zakresie k ,
Mul_2 – multimeter 2 pracujący na zakresie ,
Mul_3 – multimeter 3 pracujący na zakresie mV,
Mul_4 – multimeter 4 pracujący w trybie pomiaru temperatury,
TS – złącze odniesienia,
KG – komora grzejna.
Uwaga: Podczas ćwiczenia należy podać obok oznaczeń określenia i
wartości charakteryzujące użyte przyrządy.
Postępowanie podczas pomiaru
Wyznaczenia stałych czasowych czujników temperatury dokonuje się na
podstawie odpowiedzi w czasie na dodatni i ujemny skok temperatury,
przenosząc czujniki z cieczy o temperaturze wyższej (60-70 0C) do kąpieli o
temperaturze niższej (20-25 0C) i odwrotnie z chłodniejszej do cieplejszej
rejestrując w czasie temperaturę za pomocą komputerowego systemu akwizycji
danych z multimetrów.
Wyznaczenia stałych czasowych N L _ H i N H _ L (L-niższa temperatura, Hwyższa temperatura) dokonuje się poprzez:
- określenie czasu jaki jest potrzebny na osiągnięcie przez czujnik 63 %
różnicy temperatur kąpieli,
- prowadzenie stycznej do wykresu odpowiedzi czasowej czujnika w punkcie
rozpoczęcia zmiany temperatury,
- aproksymację linią wykładniczą odpowiedzi w czasie czujnika na skok
temperatury.
Zapis z pomiarów dokonywany jest w arkuszu wyników podanym w
oprogramowaniu obsługującym system akwizycji danych który zawiera:
- czas rejestracji,
- wartość rezystancji termistora NTC w k
- wartość rezystancji czujnika Pt-100 w
394
- wartość siły termoelektrycznej sensora NiCr-Ni w obudowie w mV
- wartość siły termoelektrycznej sensora NiCr-Ni bez obudowy w mV
- wartości temperatury w stopniach Celcjusza po przeliczeniu przez
charakterystyki termometryczne
Protokół wyników pomiaru
Tabela 25.4
Typ czujnika
NTC
Pt-100 termo
termist
opornik
or
Stała
L_H
H_L
0,5 L H L H
NiCr-Ni
termoelement
w obudowie
NiCr-Ni
termoelement bez
obudowy
s
s
s
Wzory i przykłady obliczeń
Podać wzory i przykłady obliczeń potrzebne do:
- wyznaczania stałych czasowych,
- wyznaczania niepewności pomiaru stałych czasowych.
Wyznaczone stałe czasowe L _ H i H _ L dla każdego z przetworników wpisać
do tabeli 25.4.
25.4. Uwagi o wynikach pomiaru
-------------------------------------------------------------------------------------------
UWAGA:
Zaliczenie niniejszego sprawozdania jest dla jego wykonawców
jednym z elementów weryfikacji efektów kształcenia nr 1, 4, 6, 8
zapisanych w kartach przedmiotu
nr 01 27 0704 00 oraz 01 27 0804 00.
------------------------------------------------------------------------------------------------
395
25.5. Literatura
L. Michalski, K. Eckersdorf, Kucharski J.: Termometria Przyrządy i
Metody. Politechnika Łódzka, Łódź 1998
[2] McGhee J., Henerson I., Korczyński M.J., Kulesza W.: Scientific
Metrology. Wyd. ACGM LODART, S.A. Łódź 1998
[3] Turzeniecka D.: Ocena niepewności wyniku pomiarów. Wydawnictwo
Politechniki Poznańskiej, Poznań 1997.
[1]