Metody numeryczne
materiały do wykładów
dla studentów
6.Interpolacja wielomianowa
6.1. Wielomian interpolacyjny Lagrange’a
6.2. Wielomian interpolacyjny Newtona
Materiały przygotowane w ramach projektu „Uruchomienie
unikatowego kierunku studiów Informatyka Stosowana odpowiedzią na
zapotrzebowanie rynku pracy” ze środków Programu Operacyjnego
Kapitał Ludzki współfinansowanego ze środków Europejskiego
Funduszu Społecznego nr umowy UDA – POKL.04.01.01-00-011/0900
Metody numeryczne – 6. Interpolacja wielomianowa
6.1.
Interpolacja wielomianowa
+ 1 różnych liczb
Niech będzie dane
,
,…,
oraz
+ 1 dowolnych liczb
,
,…,
.
Twierdzenie 6.1.
Istnieje dokładnie jeden wielomian
stopnia co najwyżej
, , … , przyjmuje odpowiednio wartości , , … , , tzn.:
∀ ∈ 0,1, … ,
:
=
-tego, który w punktach
6.1 .
6.1. Wielomian interpolacyjny Lagrange’a
Takim wielomianem interpolacyjnym jest np. wielomian Lagrange`a:
=
6.2
gdzie:
−
−
=
Uwaga 1. Liczby
,
,…,
−
−
…
…
−
−
−
−
!
!
… −
−
…
6.3
nazywamy węzłami interpolacji.
Uwaga 2. Jeżeli spośród węzłów interpolacji usuniemy jeden lub dołączymy jeden, to
rachunki do wyznaczenia wielomianu Lagrange`a trzeba przeprowadzać od nowa.
Przykład 6.1.
Znaleźć wielomian interpolacyjny Lagrange`a, który w węzłach: −2, 0, 1, 3, 4 przyjmuje
odpowiednio wartości:1, −1, −2, 2, 3.
© Uniwersytet Ekonomiczny w Krakowie
72
Metody numeryczne – 6. Interpolacja wielomianowa
6.2. Wielomian interpolacyjny Newtona
Twierdzenie 6.2.
Każdy wielomian
stopnia co najwyżej
przedstawić jednoznacznie w postaci:
$
=
=% +%
%
−
−
−
+ %&
…
−
−
-tego , który spełnia warunek 6.1 można
=
−
+ ⋯+ %
−
−
gdzie współczynniki % ( = 0,1, … , ) są odpowiednio dobrane.
…
−
6.4
Można wykazać, że współczynniki % tego wielomianu określone są wzorami:
$
przy czym $
= $
=
$
% =$
.
© Uniwersytet Ekonomiczny w Krakowie
−$
−
,
= 1, … ,
6.5
73
Metody numeryczne – 6. Interpolacja wielomianowa
Wzór 6.4 przyjmie więc postać:
$
=$
=
$
−
−
+$
−
+ $&
+$
−
−
…
&
…
−
=
−
−
−
+… +
6.6
Prawą stronę wzoru 6.6 nazywamy wielomianem interpolacyjnym Newtona.
Wielomian interpolacyjny Lagrange`a i wielomian interpolacyjny Newtona są identyczne,
choć różnią się postacią.
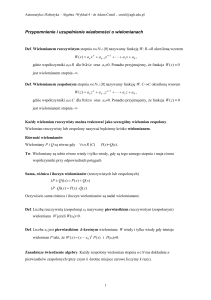
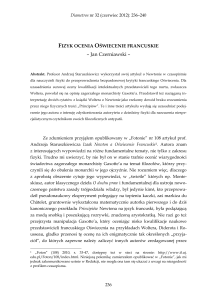
Współczynniki $
w tablicy dla = 5 :
znajdujemy według pewnego schematu, który zaprezentujemy
x0
f ( x0 )
x1
x2
x3
x4
f ( x1 )
f ( x2 )
f ( x3 )
f ( x4 )
f1 ( x1 )
f1 ( x2 )
f1 ( x3 )
f1 ( x4 )
f 2 ( x2 )
f 2 ( x3 )
f 2 ( x4 )
f 3 ( x3 )
f3 ( x4 )
f 4 ( x4 )
x5
f ( x5 )
f1 ( x5 )
f 2 ( x5 )
f 3 ( x5 )
f 4 ( x5 )
f5 ( x5 )
Dwie pierwsze kolumny tablicy są dane. Dalsze kolumny obliczamy kolejno dzieląc, zgodnie
ze wzorem 6.5 , różnicę kolejnych dwóch wyrazów danej kolumny przez różnicę
odpowiadających wyrazów pierwszej kolumny, czyli:
$!
=
$
−$
−
6.7
gdzie * > , = 0,1, … , − 1. Wyrażenia 6.7 nazywamy różnicami dzielonymi.
Szukanymi współczynnikami są pierwsze (górne) wyrazy poszczególnych kolumn (bez
pierwszej).
© Uniwersytet Ekonomiczny w Krakowie
74
Metody numeryczne – 6. Interpolacja wielomianowa
Przykład 6.2.
Wyznacz wielomian interpolacyjny Newtona dla funkcji podanej w tabeli.
$
1
2
2
1
3
−1
© Uniwersytet Ekonomiczny w Krakowie
5
0
6
1
75
Metody numeryczne – 6. Interpolacja wielomianowa
Przypadek szczególny wielomianu interpolacyjnego Newtona (równe odległości
pomiędzy węzłami interpolacji).
Podamy teraz wzór Newtona w przypadku, gdy odległości między węzłami interpolacji są
równe: −
= ∆ = ℎ dla = 1, … , .
Wykorzystywać będziemy tutaj kolejne różnice (już nie dzielone) definiowane następująco:
Δ$
Δ& $
=$
+ℎ −$
= Δ/$
+ℎ −$
Δ $
= Δ/Δ
(pierwsza różnica)
0 = Δ Δ$
(druga różnica)
ogólnie -ta różnica:
$
0 6.8
Wówczas wielomian interpolacyjny Newtona przy równych odstępach węzłów przyjmuje
postać:
$
=$
2$
+
2
+
2 $
2
−
1!
⋅
⋅
−
© Uniwersytet Ekonomiczny w Krakowie
2& $
+
2
−
&
!
⋅
…
−
−
2!
−
+ ⋯+
6.9
76
Metody numeryczne – 6. Interpolacja wielomianowa
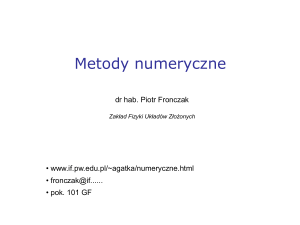
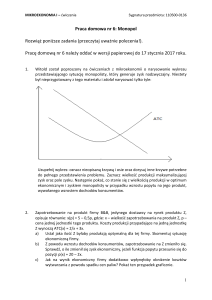
Współczynniki tego wielomianu obliczamy na podstawie tablicy (podamy dla przypadku
= 5)
f ( x0 )
ց
∆f ( x0 )
ր
ց
∆ 2 f ( x0 )
f ( x1 )
ց
ր
ց
∆f ( x1 )
ր
∆3 f ( x0 )
ց
ր
ց
∆ 2 f ( x1 )
f ( x2 )
ց
ր
∆ 4 f ( x0 )
ց
ր
∆f ( x2 )
ր
∆3 f ( x1 )
ց
ր
∆5 f ( x0 )
ց
∆ 2 f ( x2 )
f ( x3 )
ց
ր
(6.10)
ր
∆ 4 f ( x0 )
ց
ր
∆f ( x3 )
ր
ց
∆ 3 f ( x2 )
ց
ր
∆ 2 f ( x3 )
f ( x4 )
ց
ր
∆f ( x4 )
ր
f ( x5 )
Elementy pierwszej kolumny są dane, elementy każdej z następnych kolumn otrzymujemy
odejmując sąsiednie wyrazy poprzedniej kolumny, czyli stosując wzór:
dla ≤ *.
Δ
!
$
=Δ $
© Uniwersytet Ekonomiczny w Krakowie
!
−Δ $
(6.11)
77
Metody numeryczne – 6. Interpolacja wielomianowa
Przykład 6.3.
Znaleźć wielomian interpolacyjny Newtona dla funkcji określonej tabelką:
$
0
−1
2
0
4
−1
6
1
8
1
Złożoność obliczeniowa algorytmów.
Złożoność obliczeniowa algorytmów interpolacyjnych Lagrange’a i Newtona wynosi 7
© Uniwersytet Ekonomiczny w Krakowie
&
.
78