Politechnika Łódzka
Wydział Elektrotechniki, Elektroniki,
Informatyki i Automatyki
Instytut Elektroenergetyki
Zespół Trakcji Elektrycznej
Laboratorium Automatyki i Sterowania Ruchem Kolejowym
ĆWICZENIE A2
BADANIE ELEMENTÓW OBWODU TOROWEGO
ZE ZŁĄCZAMI IZOLOWANYMI
Zasada wykrywania obecności pojazdu na torze za pomocą obwodu torowego
1.
Bezpieczne prowadzenie ruchu pociągów na linii kolejowej powinno wykluczyć
możliwość spowodowania:
czołowego spotkania się pociągów jadących po tym samym torze w przeciwnych
kierunkach,
najechania z tyłu jednego pociągu na drugi przy jeździe obu pociągów po tym samym
torze w jednym kierunku,
najechania jednego pociągu na bok drugiego przy przejeździe przez zwrotnicę.
Zapobiec temu można przez oddzielenie jednego pociągu od drugiego pewną długością
toru kolejowego. Aby zrealizować tę zasadę, trzeba podzielić tor na odcinki, sprawdzać
obecność taboru na każdym z odcinków oraz prowadzić ruch pociągów tak, żeby na każdym
odcinku toru mógł znajdować się tylko jeden pociąg.
Sprawdzanie obecności pojazdu na określonym odcinku toru nazywa się kontrolą stanu
zajętości toru i odbywa się za pośrednictwem obwodów torowych lub liczników osi.
Kontrola stanu zajętości toru za pośrednictwem obwodów torowych wykorzystuje
możliwość przesyłania szynami sygnałów elektrycznych. Szyny kolejowe posiadają określone
parametry elektryczne i przewodzą prąd elektryczny, jeśli utworzy się odpowiedni obwód
elektryczny, w skład którego będą wchodzić.
Obwód torowy to odcinek toru o odpowiedniej długości, odizolowany elektrycznie od
sąsiednich. Typowa długość obwodu torowego w warunkach kolejowych jest rzędu 1 km
i więcej, w metrze - kilkadziesiąt do kilkuset metrów. Do stwierdzenia obecności pojazdu
w jego obrębie wykorzystuje się zwieranie szyn przez osie zestawów kołowych. Niezależnie
od sposobu odizolowania jednego obwodu od drugiego, zasada działania kontroli stanu
zajętości toru jest taka sama. Na jednym końcu obwodu umieszcza się źródło zasilania
(nadajnik), na drugim - odbiornik. Są również rozwiązania z nadajnikiem umieszczonym
pośrodku obwodu i dwoma odbiornikami na jego krańcach. Gdy obwód torowy nie jest zajęty
przez tabor, sygnał elektryczny z nadajnika dopływa do odbiornika. Gdy w obrębie obwodu
znajduje się pojazd, jego osie zwierają (bocznikują) toki szynowe i sygnał nie dociera do
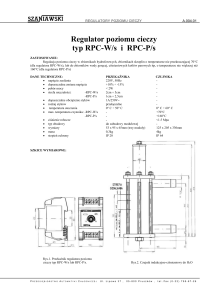
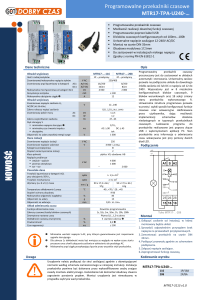
odbiornika. Zasadę działania obwodu torowego przedstawia rys. 1.
tor wolny
zasilanie
odbiór
tor zajęty
zasilanie
odbiór
Rys.1. Wykrywanie obecności osi pojazdu trakcyjnego w obrębie obwodu torowego
W obwodach torowych odbiornikiem jest kolejowy przekaźnik elektryczny. Gdy obwód
torowy (kontrolowany odcinek szyn) nie jest zajęty przez pociąg, prąd dopływa do
przekaźnika i jest on wzbudzony (zasilony). Wjazd pojazdu trakcyjnego w obręb obwodu
torowego sprawia, że prąd nie dopływa do przekaźnika i jest on odwzbudzony (nie zasilony).
Kryterium niezajętości / zajętości obwodu torowego stanowi zatem stan wzbudzenia
przekaźnika. Przekaźnik wzbudzony oznacza, że tor jest wolny, przekaźnik odwzbudzony
oznacza, że tor jest zajęty. Zasada ta obowiązuje niezależnie od kierunku jazdy pojazdu
trakcyjnego. Zajętość kontrolowanego odcinka szyn jest spowodowana obecnością nawet
pojedynczej osi zwierającej toki szynowe.
Prawidłowe działanie obwodu wykrywającego obecność osi pojazdu trakcyjnego w jego
obrębie wymaga odseparowania elektrycznego (odizolowania) obwodu od sąsiednich. Na rys.
1 miejsca odizolowania oznaczono „T ”.
2
W starszych, tzw. klasycznych obwodach torowych rolę elementów separujących od
siebie sąsiednie obwody pełnią złącza izolowane (przekładki izolacyjne i łubki umocowane
w stykach szynowych) lub złącza klejone. Są to, ogólnie mówiąc, elementy izolacyjne
montowane w szynach, wymagające cięcia szyn, przez co osłabia się je mechanicznie.
Obwody z tego typu izolacją nazywa się obwodami złączowymi lub obwodami ze złączami
izolowanymi. W nowszych obwodach torowych, tzw. obwodach bezzłączowych lub
obwodach z separacją elektryczną, stosuje się specjalne układy elektryczne (obwody
rezonansowe), zwane złączami elektrycznymi, które nie naruszają ciągłości mechanicznej
szyn.
Niezależnie od sposobu odizolowania jednego obwodu torowego od drugiego, zasada
działania kontroli zajętości jest taka sama, różna jest postać sygnału zasilającego obwód.
Obwody klasyczne z reguły zasilane są napięciem 50 Hz obniżanym do poziomu kilku do
kilkunastu woltów. Obwody z separacją elektryczną wykorzystują sygnały wyższych
częstotliwości.
Obwody torowe są znane i stosowane przez kolej od dziesięcioleci, ze względu na ich
prostą budowę i pewność działania. Obwód torowy stanowi tzw. układ bezpieczny. Oznacza
to, że żadna usterka nie spowoduje powstania sytuacji niebezpiecznej, jaką jest
zinterpretowanie kontrolowanego odcinka faktycznie zajętego przez pojazd jako wolny.
Jakiekolwiek uszkodzenie, np. pęknięcie szyny, przerwanie połączeń doprowadzających itp.,
powoduje przerwanie przepływu prądu i odwzbudzenie przekaźnika, co oznacza zajętość
kontrolowanego odcinka.
Budowa obwodu torowego ze złączami izolowanymi
2.
Klasyczne obwody torowe ze złączami izolowanymi są jeszcze dość powszechnie
stosowane na kolei, również na sieci PKP. Obwody te są zasilane napięciem 220V 50 Hz,
obniżonym do poziomu 4 ÷ 12 V. Odbiornik stanowi dwuuzwojeniowy przekaźnik
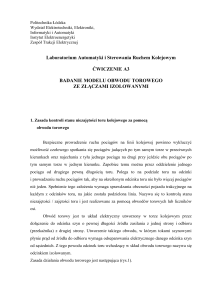
indukcyjny I klasy zasilany poprzez transformator podwyższający napięcie. Schemat obwodu
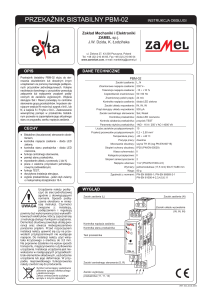
torowego 50 Hz, stosowanego na PKP przedstawia rys. 2.
3
220 V
220 V
Rys. 2. Schemat obwodu torowego 50 Hz
Ogólnie, obwód torowy składa się z układu zasilania, odcinka izolowanego (odcinka
szyn) oraz układu odbiorczego. W układzie zasilania znajduje się transformator , zwany
zasilającym, posiadający odczepy, dzięki czemu możliwa jest regulacja napięcia zasilającego
szyny stosowanie do długości oraz stanu podkładów i podsypki (tłumienności) odcinka
izolowanego. Typowy transformator zasilający ma przekładnię: 220/3+1+4+2+2V, co daje
możliwość zasilania odcinka izolowanego napięciem: 3, 4, 8, 10 lub 12V. W układzie
zasilania znajduje się opornik ograniczający, służący również do regulacji napięcia na
odcinku izolowanym. Chroni on jednocześnie źródło prądu przed przeciążeniem przy zwarciu
obwodu przez oś pociągu znajdującego się na początku odcinka izolowanego.
Układ odbiorczy stanowi transformator, zwany przekaźnikowym, podwyższający
napięcie, o przekładni 2/8V oraz dwuuzwojeniowy przekaźnik indukcyjny. Jedno uzwojenie
przekaźnika, tzw. torowe, zasilane jest napięciem panującym między szynami na końcu
odcinka izolowanego, drugie – tzw. lokalne – napięciem 220 V.
Przy trakcji elektrycznej odcinek izolowany jest częścią dwóch obwodów
elektrycznych: obwodu torowego do kontroli stanu zajętości toru oraz obwodu zasilania
taboru przez sieć trakcyjną. Pierwszy z nich jest to tzw, obwód słaboprądowy, drugi –
silnoprądowy, trakcyjny, zasilany napięciem stałym 3 kV. Prąd trakcyjny płynie siecią górną
(lub 3-cią szyną w metrze) z podstacji zasilającej do odbieraka pojazdu i wraca szynami do
podstacji. Szyny kolejowe stanowią sieć powrotną prądu trakcyjnego. Obwód dla powrotnego
prądu trakcyjnego powinien być ciągły, nie przerywany złączami izolowanymi obwodów
torowych. Zapewnienie prawidłowej pracy obwodu torowego, przy uwzględnieniu
wymagania ciągłości elektrycznej szyn dla przepływu powrotnego prądu trakcyjnego,
wymaga zastosowania dodatkowych elementów – dławików torowych.
4
Dławik torowy posiada wyprowadzenie ze środka uzwojenia i jest tak skonstruowany,
że jego impedancja dla prądu o częstotliwości 50 Hz jest rzędu 3÷4 Ω a rezystancja dla prądu
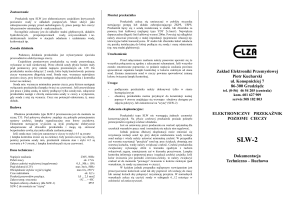
stałego ma wartość ułamka oma. Umieszczając pomiędzy szynami przy złączu izolowanym
dwa dławiki torowe, których środki uzwojeń są połączone, umożliwia się przepływ prądu
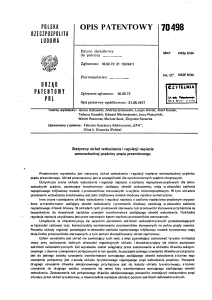
trakcyjnego przez niewielką rezystancję dławików – rys. 3. Prąd obwodu torowego (prąd
sygnałowy) nie wypłynie poza granice odcinka izolowanego ze względu na znaczną
impedancję dławika dla 50 Hz.
IT
IT
IS
IT
2IT
IT
IT
2IT
IT
IS
IT
IT
Rys 3. Przepływ powrotnego prądu trakcyjnego IT przez dławiki torowe
(IS – prąd sygnałowy obwodu torowego)
3.Elementy obwodu torowego
3.1 Kolejowy przekaźnik indukcyjny
Przekaźnik jest elementem pośredniczącym pomiędzy obwodem sterującym
a obwodem sterowanym. Pod wpływem określonych sygnałów działających na
uzwojenie umieszczone w obwodzie sterującym, przekaźnik zmienia stan, a jego
zestyki oddziałują na obwód sterowany (jeden lub więcej). Przekaźnik jest na ogół
elementem dwustanowym. Jest w stanie wzbudzenia, gdy sygnał elektryczny
oddziałuje na uzwojenie. Wtedy następuje przyciągnięcie kotwicy przekaźnika
i zamknięcie zestyków czynnych (zwiernych) i otwarcie zestyków biernych
(rozwiernych). Przeciwny stan to stan odwzbudzenia przy braku sygnału działającego
na uzwojenie przekaźnika. W tym stanie zamknięte są zestyki bierne i otwarte czynne.
W zależności od rodzaju obwodów i funkcji, jakie przekaźniki w nich spełniają, stawia
się im odpowiednie wymagania. Najwyższe wymagania dotyczące niezawodności pracy są
stawiane tym przekaźnikom, które w zastosowanych obwodach nie są i nie mogą być
kontrolowane, a ich nieprawidłowa praca może stworzyć sytuację niebezpieczną dla ruchu
pojazdów kolejowych. Do tej grupy należą przekaźniki stosowane w obwodach torowych.
Inną grupę stanowią przekaźniki stosowane w obwodach o charakterze pomocniczym lub
5
informacyjnym, w których nieprawidłowa praca przekaźnika wywoła jedynie usterkę w pracy
urządzeń.
W polskim kolejnictwie przekaźniki stosowane w urządzeniach srk pod względem
funkcjonalnym i pewności działania dzieli się na: przekaźniki I klasy, przekaźniki II klasy
i przekaźniki pomocnicze. Podział ten związany jest z konstrukcją przekaźnika.
Po odłączeniu napięcia od cewki, zwolnienie kotwicy przekaźnika może następować
pod wpływem własnego ciężaru kotwicy, działania sprężyn lub działania sumy sił
pochodzących od ciężaru własnego kotwicy i siły sprężystości sprężyn stykowych.
Konstrukcja przekaźników I klasy powinna zapewnić odpadanie kotwicy pod jej własnym
ciężarem i rozwarcie zestyków czynnych.
W obwodach torowych znalazły zastosowanie, względu na swoje charakterystyczne
cechy, przekaźniki indukcyjne JRV i JRY. Są to dwuuzwojeniowe przekaźniki tarczowe
dwustawne i trzystawne, zaliczane do I klasy bezpieczeństwa.
Obwód magnetyczny dwustawnego przekaźnika JRV składa się z dwóch obwodów:
lokalnego i torowego. Obwód lokalny wykonany jest z dwóch elektromagnesów w kształcie
litery C, oddzielonych szczeliną, w której obraca się tarcza aluminiowa. Tarcza pełni funkcję
kotwicy. Uzwojenie lokalne jest zasilane napięciem 220V 50 Hz. Elektromagnes torowy
(kontrolny) jest tak usytuowany, że obejmuje część powierzchni ruchomej tarczy. Uzwojenie
torowe (kontrolne) zasilane jest napięciem 50 Hz o wartości rzędu kilku voltów, zależnej od
parametrów (tłumienia) odcinka izolowanego i wartości zasilającego go napięcia.
Znamionowa wartość tego napięcia wynosi 10 V.
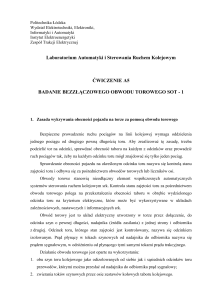
Elementy obwodu magnetycznego przekaźnika indukcyjnego oraz schemat połączeń
jego uzwojeń pokazano na rys. 4.
6
a)
b)
Uzwojenie
lokalne
Rys.4 Przekaźnik JRV
a) elementy przekaźnika
Uzwojenie
torowe
b) schemat połączeń uzwojeń
1 – tarcza aluminiowa, 2 - elektromagnes uzwojenia lokalnego,
3 – elektromagnes uzwojenia kontrolnego, 4 – układ zestyków.
Zasada działania przekaźnika indukcyjnego opiera się na zjawisku polegającym na
tym, że w wyniku wzajemnego oddziaływania pola magnetycznego i prądu płynącego
w przewodniku (tu w tarczy z materiału niemagnetycznego o dużej przewodności
elektrycznej) znajdującym się w tym polu, powstaje siła o kierunku takim, że wytworzony
moment napędowy dąży do usunięcia tarczy z obszaru działania pola.
Oba obwody magnetyczne są umieszczone prostopadle względem siebie. Gdy w obu
uzwojeniach płynie prąd przemienny, pod wpływem wypadkowego momentu obrotowego
tarcza aluminiowa obraca się o pewien kąt, zamykając zestyki zwierne i otwierając rozwierne.
Wypadkowy moment napędowy przekaźnika określony jest wzorem:
M c f 1m 2 m sin c I L I K sin
gdzie: c – stała zależna od konstrukcji przekaźnika,
f – częstotliwość prądu zasilającego,
Φ1m, Φ2m – amplitudy strumieni magnetycznych,
φ – kąt między wektorami strumieni magnetycznych,
IL, IK - prądy w uzwojeniach lokalnym, torowym.
Tarcza obraca się dookoła osi prostopadłej do jej płaszczyzny pod wpływem
przenikających ją dwóch pól magnetycznych przesuniętych względem siebie w fazie o kąt φ.
Każde pole wytwarza w tarczy prądy wirowe, które są poddane działaniom drugiego pola,
wskutek czego siła wypadkowa porusza tarczę. Jak widać z zależności określającej moment
obrotowy, praca przekaźnika zależy nie tylko od natężenia prądu przepływającego przez oba
uzwojenia (wartości obu strumieni), ale również od kąta φ przesunięcia fazowego między
tymi prądami. Przekaźnik indukcyjny ma zatem cechę fazoczułości. Największy moment
7
wystąpi przy kącie φ = 900. Gdy prądy (napięcia) uzwojenia torowego i lokalnego będą
w fazie, tarcza nie obróci się - przekaźnik nie wzbudzi się.
Obwody torowe zasilane się z trójfazowej sieci niskiego napięcia. Cecha fazoczułości
przekaźnika indukcyjnego wymaga zasilania jego obwodu lokalnego i torowego napięciami
z różnych faz, tak aby uzyskać φ >0. Fazoczułość działania jest istotna z punktu widzenia
bezpieczeństwa pracy przekaźnika. Chroni przed zadziałaniem pod wpływem przypadkowych
pasożytniczych napięć.
Inną cechą charakterystyczną przekaźnika indukcyjnego jest to, że przeważającą część
energii potrzebnej do jego pracy dostarcza obwód lokalny (moc pobierana przez uzwojenie
lokalne wynosi około 50 W), a tylko nieznaczną część energii dostarcza obwód torowy (moc
pobierana przez uzwojenie torowe wynosi około 0,5 W). Jest to ważna cecha przy stosowaniu
przekaźnika JRV jako przekaźnika torowego w obwodach kontroli zajętości toru, gdyż
energia pobierana przez uzwojenie torowe jest przesyłana ze stratami od źródła zasilania
przez całą długość odcinka izolowanego obwodu torowego.
Przekaźniki typu JRY są trzystawnymi przekaźnikami zaciskowymi, zaliczanymi do
I klasy bezpieczeństwa. Pod względem konstrukcji zewnętrznej i wewnętrznego układu
magnetycznego są zbliżone do JRV. Różnica polega na tym, że tarcza aluminiowa pełniąca
rolę kotwicy sterującej zestykami może zajmować trzy położenia:
-
położenie środkowe, gdy jedno z uzwojeń albo oba nie są zasilane;
-
położenie czynne normalne N lub czynne odwrotne R, gdy zasilane są
odpowiednio oba uzwojenia i tarcza obróci się w jednym lub przeciwnym
kierunku. Położenie N lub R zależy od kierunku momentu napędowego, a więc
przesunięcia fazowego (dodatniego lub ujemnego) między napięciami zasilającymi
oba uzwojenia.
3.2 Dławik torowy
Dławiki torowe są stosowane w obwodach torowych ze złączami izolowanymi w celu
umożliwienia przepływu prądu trakcyjnego przez złącze dwoma tokami szyn. Przy każdej
parze złączy w obu szynach umieszcza się dwa dławiki z połączonymi środkami uzwojeń.
Dławiki mają znaczne gabaryty, są umieszczane na zewnątrz toru na specjalnym podłożu.
Zasadniczymi częściami dławika torowego są: rdzeń, na którym nawinięte są
uzwojenia trakcyjne oraz dodatkowe uzwojenie rezonansowe. Uzwojenie trakcyjne składa się
z dwóch jednakowych cewek, każda o kilku zwojach, wykonanych z przewodu o znacznym
przekroju, ze względu na duże wartości prądów trakcyjnych. Uzwojenie rezonansowe, do
8
którego dołączony jest kondensator ma około 300 zwojów. Rdzeń zamknięty jest jarzmem.
Wszystkie elementy znajdują się w obudowie wypełnionej olejem transformatorowym
i przykrytej pokrywą. Wewnątrz obudowy znajduje się kondensator.
Przez połówki uzwojenia trakcyjnego i połączenie środków obu dławików płynie prąd
trakcyjny jednego toku szynowego. Rezystancja uzwojenia trakcyjnego wynosi kilka
tysięcznych Ω. Impedancja dławika dla 50 Hz powinna być duża, gdyż zmniejsza to pobór
mocy przez obwód i poprawia warunki bocznikującego działania zestawu kołowego.
Zastosowanie uzwojenia rezonansowego, sprzężonego indukcyjnie z uzwojeniem torowym
i dostrojonego przez pojemność do rezonansu zwiększa impedancję dławika do kilku Ω.
Impedancję dławika torowego z obwodem rezonansowym można określić na
podstawie uproszczonego schematu zastępczego przedstawionego na rys. 5.
I1
M
R1
U
L1
Rr
I2
Lr
C
Rys. 5. Schemat zastępczy dławika torowego z obwodem rezonansowym
Na schemacie oznaczono:
R1, L1 – rezystancja, indukcyjność uzwojenia trakcyjnego,
Rr, Lr, C - rezystancja, indukcyjność, pojemność obwodu rezonansowego.
Sprzężenie obu obwodów określa indukcyjność wzajemna M. W uproszczeniu:
M k L L
1
r
Dla obwodu pierwotnego (trakcyjnego):
U I R jL jM I
1
1
1
2
Dla obwodu wtórnego (rezonansowego):
1
I2
jM I1 Rr jLr
jC
Rozwiązując powyższy układ równań uzyskuje się:
M 2
U Z1
I1
Z 2
9
Z1 R1 jL1
gdzie:
Z 2 Rr jLr
1
jC
Impedancja wejściowa dławika wynosi zatem:
Z dl
M 2
U
Z1
I1
Z 2
Przy dostrojeniu obwodu wtórnego do rezonansu przy częstotliwości napięcia
zasilającego U spełniony jest warunek Lr 1
C
i uzyskuje się największą wartość
impedancji dławika.
Wtedy:
2 M 2
Z2
2 L1 Lr
Rr
Z dl R1 jL1
2 L1 Lr
L
Z dl R1 1
C Rr
Rr
R1
L1
jL1
C Rr
2
L1 2
Dławik torowy jest kłopotliwym w utrzymaniu elementem obwodu, wymaga
okresowego dostrajania do rezonansu (w celu uzyskania maksymalnej wartości impedancji)
i uzupełniania oleju.
Przy idealnej symetrii rozpływu powrotnego prądu trakcyjnego rdzeń dławika nie jest
magnesowany, gdyż strumienie magnetyczne w obu połówkach dławika znoszą się. Na skutek
istniejącej w praktyce asymetrii rozpływu prądu trakcyjnego powstaje w rdzeniu dławika
wypadkowy strumień magnetyczny. Magnesowanie rdzenia prądem stałym powoduje
zmniejszenie jego przenikalności magnetycznej, a więc zmniejszenie indukcyjności, a co za
tym idzie impedancji dławika. Aby uzyskać mniejszą zależność impedancji wejściowej
dławika od natężenia prądu asymetrii, stosuje się szczelinę powietrzną. Jednocześnie wpływ
ten będzie ograniczony przez właściwą konserwację odcinków izolowanych (zmniejszenie
asymetrii rozpływu prądów trakcyjnych).
Zmalenie impedancji dławika torowego z powodu odstrojenia od rezonansu obwodu
rezonansowego lub asymetrii rozpływu prądu trakcyjnego (magnesowanie rdzenia prądem
stałym) może spowodować występowanie zbyt niskiego napięcia na końcu obwodu torowego
i przejście przekaźnika torowego w stan odwzbudzenia przy torze wolnym. Sytuacja ta nie
jest niebezpieczna, powoduje jedynie zmniejszenie przepustowości linii.
10
4.
Wykonanie ćwiczenia
4.1 Badanie przekaźnika indukcyjnego JRV
Zapoznać się z budową przekaźnika oraz oznaczeniami zestyków czynnych i biernych.
Spisać dane znamionowe przekaźnika.
Zestawić układ pomiarowy jak na rys. 6.
0
R
S
T
mA
JRV
Przesuwnik fazy
Uzwojenie
lokalne
mA
V
Transformator
separujacy 1
Uzwojenie
torowe
Transformator
separujacy 2
We A
We B
Czasomierz
Rys.6. Układ pomiarowy przekaźnika JRV
Zasilić oba uzwojenia przekaźnika napięciami z różnych faz sieci 3-fazowej niskiego
napięcia. Na uzwojenie torowe podać napięcie znamionowe 10 V. Wyznaczyć przedział
kątów przesunięcia fazowego φ między napięciami zasilającymi oba uzwojenia przekaźnika,
przy których przechodzi on w stan wzbudzenia. Do pomiaru przesunięcia fazowego między
napięciami zasilającymi uzwojenia torowe i lokalne użyć częstotliwościomierz – czasomierza
PFL-20. Miernik mierzy czas przesunięcia między napięciami. Dla określenia kąta φ należy
wykorzystać zależność, że 360° odpowiada przesunięciu czasowemu 20 ms.
11
Pomierzyć wartości prądów pobieranych przez oba uzwojenia, obliczyć pobór mocy
pozornej oraz procent całkowitego poboru mocy przypadający na każde z uzwojeń. Wyniki
zestawić w tabeli.
Tabela 1
Uzwojenie torowe Uzwojenie lokalne
Uzn
10 V
220 V
Izn
Szn = Uzn Izn
Szn%
Przedział kątów
Dla ustawianych kolejno wartości kąta przesunięcia fazowego φ, regulować napięcie
zasilające uzwojenie torowe tak, aby wyznaczyć wartości napięć Uk1, Uk2, Uk3 oraz prądów
Ik1, Ik2, Ik3. Nie należy przekraczać na uzwojeniu torowym napięcia 12 V. Określić stan
zestyków zwiernych i rozwiernych w poszczególnych fazach działania przekaźnika. Wyniki
zestawić w tabeli.
Uk1, Ik1 – wartości napięcia i prądu uzwojenia lokalnego, przy których przekaźnik osiąga
minimalny moment roboczy (wskaźnik opada do pierwszej kreski),
Uk2, Ik2 – wartości napięcia i prądu uzwojenia lokalnego, przy których przekaźnik osiąga
maksymalny moment (wskaźnik opada do drugiej kreski),
Uk3, Ik3 – wartości napięcia i prądu uzwojenia lokalnego, przy których przekaźnik przechodzi
w stan bierny.
Tabela 2
stopnie
Uk1
V
Ik1
mA
Uk2
V
Ik2
mA
Uk3
V
Ik3
mA
W sprawozdaniu umieścić:
-
opis budowy przekaźnika,
-
tabele z wynikami pomiarów,
-
charakterystyki Uk1 (φ), Ik1(φ), Uk2 (φ), ... , Ik3(φ),
-
uwagi i wnioski.
12
Stan zestyków
Zwierny
rozwierny
4.2 Badanie dławika torowego
Badaniom podlega dławik torowy ILA 1302 o następujących parametrach:
liczba zwojów uzwojenia trakcyjnego: 12
liczba zwojów uzwojenia rezonansowego: 228 ÷ 294
długość szczeliny powietrznej: 0,4 mm
obciążenie prądem stałym: 1000 A
pojemność kondensatora w obwodzie rezonansowym: 10 μF.
Schemat dławika przedstawia rys. 7.
6 zw.
6 zw.
228 zw.
6 zw.
12 zw.
1
3
9
8
2
7
12 zw.
12 zw.
12 zw.
12 zw.
4
10
5
6
C
Rys.7. Schemat dławika torowego ILA 1302
4.2.1 Pomiar impedancji dławika torowego bez obwodu rezonansowego
Dołączając do uzwojenia trakcyjnego dławika układ pomiarowy jak na rys.8, zmierzyć
metodą techniczną impedancję dławika dla 50 Hz przy rozwartym obwodzie rezonansowym.
13
V
A
220 V
Rys.8. Układ połączeń do pomiaru impedancji dławika
4.2.2 Wyznaczenie charakterystyk impedancji dławika w funkcji liczby zwojów
uzwojenia rezonansowego
W układzie połączeń jak na rys. 8 zmierzyć metodą techniczną impedancję dławika
zmieniając liczbę zwojów uzwojenia rezonansowego, przy stałej wartości napięcia na
uzwojeniu trakcyjnym. Pomiary rozpocząć od liczby zwojów z=228, łącząc zaciski 9 – 2 oraz
10 – 3 i zwiększać co 6 zwojów do wartości maksymalnej z=294. Wyniki pomiarów zestawić
w tabeli. Charakterystyki Z=f(z) wyznaczyć dla następujących wartości napięcia na
uzwojeniu trakcyjnym dławika: 2; 3; 4; 5; i 6 V.
Uwaga: przy każdorazowej zmianie liczby zwojów w uzwojeniu rezonansowym,
ustawiać zerową wartość napięcia na dławiku.
Tabela 3
U=
z
I
Z
A
228
W sprawozdaniu umieścić:
14
-
opis budowy dławika torowego,
-
pomierzoną wartość impedancji dławika bez obwodu rezonansowego,
-
tabele z wynikami pomiarów impedancji dławika z obwodem rezonansowym,
-
wykresy charakterystyk Z = f(z) przy U = const,
-
tabelę z zestawionymi wartościami liczby zwojów i impedancji dławika dostrojonego
do rezonansu,
-
uwagi i wnioski.
15