KURS
Jak zbudować kompas
elektroniczny z czujnikiem
magnetycznym, część 1
W czasach, gdy nawigacja
jest powszechnie kojarzona ze
skomplikowanymi systemami
satelitarnymi, takimi jak
NAVSTAR GPS, mówienie
o prostym przyrządzie
nawigacyjnym, jakim jest
kompas magnetyczny mogłoby
wydawać się anachronizmem.
Okazuje się jednak, że kompasy
nadal znajdują szerokie
wykorzystanie.
Mimo powszechnego obecnie stosowania elektronicznych przyrządów
nawigacyjnych, kompasy w dalszym
ciągu można spotkać między innymi jako wyposażenie pomocnicze
w samolotach i na statkach. Często
są także stosowane w turystyce pieszej. O zastosowaniach kompasów
decyduje nie tylko niska cena oraz
prostota i związana z nią wysoka
niezawodność. Okazuje się, że to,
co potrafi prosty kompas, tj. określenie orientacji dowolnego kierunku względem północy magnetycznej, nie zawsze jest możliwe nawet
z wykorzystaniem tak zaawansowanego systemu, jakim jest GPS. Odbiornik GPS wyznacza kurs, a więc
kierunek poruszania się, na podstawie składowych prędkości tego ruchu. Jak jednak określić kierunek,
np. osi pojazdu względem północy,
jeśli pojazd ten stoi na parkingu?
Jeśli nie chcemy inwestować wielu tysięcy dolarów w wieloantenowe
odbiorniki GPS, które poradzą sobie
i z tym problemem, możemy zwrócić
się do sprawdzonego rozwiązania,
jakim jest właśnie kompas. Problem
ten dostrzegli także producenci odbiorników GPS i na rynku od dawna już są odbiorniki z wbudowanym
kompasem działającym na zasadzie
pomiaru pola magnetycznego. W prezentowanym artykule przedstawimy
teorię budowy elektronicznego kompasu z czujnikiem magnetycznym.
Elektronika Praktyczna 4/2007
Dlaczego kompas
elektroniczny?
zań poprzez kompensację dewiacji
magnetycznej, wynikającej z oddziaływania stałych zewnętrznych pól
magnetycznych, np. pochodzących
od karoserii pojazdu, w którym zamontowano kompas. Opisane wyżej
rozwiązania są jednak zwykle stosowane w bardziej złożonych układach kompasów.
Kompas elektroniczny ma w porównaniu z jego tradycyjną wersją
kilka istotnych zalet. Wyznaczony
w nim kierunek może być przedstawiony użytkownikowi na wiele sposobów, np. na wyświetlaczu diodowym, wyświetlaczu LCD alfanumerycznym lub graficznym, czy nawet
w formie komunikatów głosowych. Ziemskie pole magnetyczne
Możliwości są tutaj ograniczone
Z a r ó w n o ko m p a s y t r a d y c y j jedynie inwencją konstruktora. Jene, jak i elektroniczne wykorzystuśli konstruowany przez nas kom- ją właściwości magnetyczne naszej
pas będzie współpracował z innymi planety. Do opisu ziemskiego pola
urządzeniami elektronicznymi, np. magnetycznego posłużymy się proz układem sterowania robota, z kom- stym modelem i założymy, że pole
puterem zintegrowanego systemu to odpowiada w przybliżeniu polu
nawigacyjnego, itp., dane wyjściowe
wytwarzanemu przez umieszczony
z kompasu elektronicznego mogą w środku Ziemi magnes sztabkobyć w wygodny sposób przekazane wy (dipol magnetyczny), z jednym
do dalszej części systemu np. przez biegunem magnetycznym w pobliżu
port szeregowy, wyjście PWM i na geograficznego bieguna północnego
wiele innych sposobów. Możliwości i z drugim biegunem magnetycznym
takiej nie będziemy mieli w trady- w pobliżu bieguna południowego.
cyjnym kompasie z igłą magnetyczPołożenie biegunów magnetycznych
ną. Ponadto kompasy elektroniczne nie pokrywa się jednak z połosą obecnie konstruowane zwykle żeniem biegunów geograficznych,
jako urządzenia mikroprocesorowe,
a linia łącząca te bieguny twoco umożliwia
zaimplementowanie w ich oprogramowaniu wielu użytecznych
funkcji. Możliwe
jest podawanie
od razu azymutu geograficznego zamiast magnetycznego, co
przy tradycyjn y m ko m p a s i e
wymagałoby użycia mapy z zaznaczoną deklinacją magnetyczną. W bardziej
zaawansowanych
rozwiązaniach
można również pokusić się
o zmniejszenie
b ł ę d ó w w s k a - Rys. 1 Model ziemskiego pola magnetycznego
93
KURS
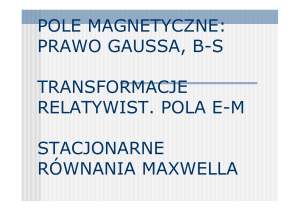
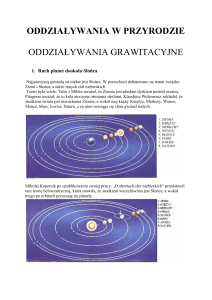
rzy z osią obrotu Ziemi kąt równy
około 11,3°. Opisany model pola
magnetycznego przedstawiono na
rys. 1. Z rysunku wynika, że biegun
magnetyczny określany jako północny jest w rzeczywistości biegunem
południowym magnesu występującego w modelu pola. Konwencja taka
obowiązuje ze względów historycznych, ponieważ kiedyś przyjęto, że
biegunem północnym magnesu (np.
igły magnetycznej) umieszczonego
w ziemskim polu magnetycznym
jest ten biegun, który ustawia się
w kierunku północy geograficznej.
Taki prosty model dobrze opisuje efekty wywołane występowaniem
pola, ale nie oddaje istoty zjawiska
magnetyzmu ziemskiego i odpowiada
raczej historycznym wyobrażeniom
na jego temat. Dawne teorie głosiły, że źródłem pola magnetycznego
wokół Ziemi jest namagnesowane
metaliczne jądro naszej planety.
Obecnie uważa się, że przyczyną
powstawania pola magnetycznego
wokół Ziemi są prądy wirowe płynące w zewnętrznej części jej płynnego jądra. Wiedza na ten temat
nie jest jednak pełna, a zagadnienie
magnetyzmu ziemskiego nadal stanowi przedmiot wielu hipotez i badań naukowych.
Ilość różnorodnych zjawisk fizycznych mających wpływ na pole
magnetyczne Ziemi jest ogromna,
ale z punktu widzenia naszej aplikacji, którą jest kompas elektroniczny o niskiej rozdzielczości, nie ma
potrzeby ich szczegółowej analizy.
Warto natomiast zdawać sobie sprawę z faktu, że pole to posiada składową zmienną, oraz składową, której uśrednioną wartość określa się
jako stałe pole magnetyczne. Skła-
dowa zmienna ma stosunkowo niewielką wartość, a jej udział w polu
całkowitym wynosi na ogół nie więcej niż 1%, niekiedy osiągając 5%.
Określanie kierunku w kompasach
bazuje na występowaniu stałego
pola magnetycznego, a pole zmienne można traktować jako składnik
zakłócający pomiary.
Natężenie stałego ziemskiego
pola magnetycznego występującego
przy powierzchni naszej planety
zmienia się w zależności od lokalizacji w zakresie od około 15 do
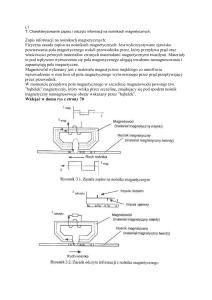
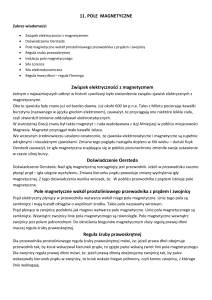
50 A/m. Wektor natężenia pola magnetycznego w punkcie P przy powierzchni Ziemi oraz jego składowe
przedstawiono na rys. 2.
Wektor natężenia pola magnetycznego Ziemi H posiada dwie
składowe: składową pionową H z
oraz składową poziomą H rp. Kierunek składowej H rp w punkcie P
położonym przy powierzchni Ziemi
jest zgodny z kierunkiem lokalnego południka magnetycznego. Igły
tradycyjnych kompasów ustawiają się właśnie wzdłuż południków
magnetycznych, czyli półokręgów
biegnących po powierzchni Ziemi
i łączących oba bieguny magnetyczne. Wektor składowej poziomej Hrp
można z kolei rozłożyć na składową równoległą do mierzonego kierunku (osi kompasu) Hr i składową
prostopadłą do tego kierunku H p.
Przyjęto, że dodatnie wartości tych
składowych odpowiadają zwrotowi
wektora H r do przodu, natomiast
wektora Hp w prawo. Jeśli zwrócimy
kompas w interesującym nas kierunku to wskaże on kąt zwany azymutem, na rys. 2 oznaczony symbolem
α. Pojęcie azymutu jest zapewne
doskonale znane większości czytelników, zwłaszcza
tym, którzy mieli
kiedykolwiek do
czynienia z harcerstwem. Przypomnijmy jednak: azymut jest
to kąt zawarty
między północną
częścią południka
magnetycznego,
a danym kierunkiem poziomym.
Wartość azymutu
liczy się zgodnie
z ruchem wskazówek zegara i wyRys. 2 Rozkład pola magnetycznego w punkcie P przy
raża w stopniach,
powierzchni Ziemi
minutach oraz se-
94
kundach kątowych w zakresie od 0
do 360°.
Należy zwrócić uwagę, że wskazywany przez kompas azymut magnetyczny różni się od azymutu
geograficznego określanego względem południka geograficznego. Dzieje się tak, ponieważ, jak wspomniano, położenie biegunów magnetycznych i geograficznych nie pokrywa
się. Obecne położenie północnego
bieguna magnetycznego znajduje się
w pobliżu Wyspy Ellefa Ringnesa
i ma współrzędne geograficzne równe około 79°N, 105°W. Z tego względu pomiędzy południkiem magnetycznym i geograficznym występuje
kąt zwany deklinacją magnetyczną.
Przyjęto, że wartość deklinacji jest
dodatnia dla odchyleń południka
magnetycznego względem geograficznego na wschód i ujemna przy
odchyleniach na zachód. Deklinacja
magnetyczna stanowi również różnicę pomiędzy azymutem magnetycznym, określanym przez kompas,
a azymutem geograficznym i należy
ją uwzględnić podczas wyznaczania
kierunków. Deklinacja magnetyczna
jest różna w różnych miejscach naszej planety i zmienia się w czasie
z powodu stałego przemieszczania
się biegunów magnetycznych. Jest
ona podawana m.in. na mapach
nawigacyjnych. W Internecie można
znaleźć formuły do obliczeń deklinacji oraz kalkulatory, które pozwalają sprawdzić jej wartość w wybranym miejscu na kuli ziemskiej,
w wybranym czasie. Autorzy polecają odwiedzenie strony http://www.
ngdc.noaa.gov/seg/geomag/jsp/Declination.jsp i samodzielne eksperymenty
z umieszczonym tam kalkulatorem.
Ziemskie pole magnetyczne określane jako stałe, w rzeczywistości
okazuje się zmienne w czasie. Wraz
z upływem czasu stopniowo zmienia swój kierunek i zmniejsza swoją wartość, jednak zmiany te nie
są zauważalne w krótkich odcinkach
czasu. Przykładowo, zmiana kierunku pola o około 0,1° trwa rok.
Obecnie ziemskie pole magnetyczne jest w fazie zmniejszania swojej
wartości, przy czym czas połowicznego zaniku tego pola wynosi około
1400 lat. Kierunek tych zmian nie
jest jednak przewidywalny w długim czasie. W historii zdarzały się
już nawet okresy zmiany kierunku
pola magnetycznego na przeciwny,
więc można się spodziewać takiego zjawiska również w przyszłości.
Elektronika Praktyczna 4/2007
KURS
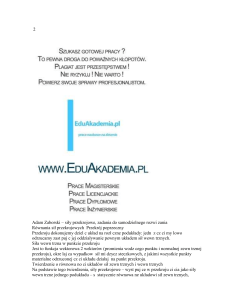
Rys. 3 Rozkład pola magnetycznego w czujniku magnetorezystancyjnym
warto��, jednak zmiany te nie s�
zauwa�alne w krótkich
Rys. 4 Charakterystyki R=f(H
Hzewn/H
H0) czujników magnetoczasu.
Przyk�adowo,
zmiana
kierunku
pola
o oko�o
0,1� ze
rezystancyjnych:
a) czujnik
standardowy,
b) czujnik
Gdyby odcinkach
doszło do zmiany
biegunoObecnie przyrok. Obecnie
jest w fazie
strukturą grzebieniową
wości, trwa
pole magnetyczne
stałobyziemskie
n a j m n i e j pole
k i l ku magnetyczne
się bardzo
słabe, a liczbaswojej
biegu- warto�ci,
producentów ma
zmniejszania
przy czym czas po�owicznego
nów magnetycznych
mogłyby
ulec
Zależność
od prow
swojej
ofercie
czujnikilat.
odpowiedzaniku tego pola wynosi oko�o 1400
Kierunek
tych rezystancji
zmian
zwielokrotnieniu, co postawiłoby nie do pomiarów ziemskiego pola
stopadle przyłożonego zewnętrznenie jest
jednak
przewidywalny
w d�ugim
okresie
czasu.
W
pod znakiem
zapytania
przydatność
go pola
magnetycznego
H zewn jest
magnetycznego zwane
magnetometrahistorii
zdarza�y
si�
ju�
nawet
okresy
zmiany
kierunku
pola
kompasu w nawigacji. Osoby, które mi. Spośród różnych rodzajów czuj- określona dla Hzewn
≤H
H0. Przy wartoz tego magnetycznego
powodu mogłyby zrezygnościach Hzewn≥H
Htakiego
rezystancja czujnika
ników natężenia
magnetycznena przeciwny
wi�c pola
mo�na
si� spodziewa�
0
wać z zjawiska
wykonania kompasu
elektroprzyjmuje
stałą,
go
przyjrzymy
się
bliżej
czujnikom
równie� w przysz�o�ci. Gdyby dosz�o do zmiany minimalną wartość
nicznego musimy w tym miejscu opartym na efekcie magnetorezy- równą R0. Zarówno rezystancja R0,
sta�oby
si� bardzo
s�abe,
a
biegunowo�ci
uspokoić.
Wprawdzie polepole
magne-magnetyczne
zakres zmian
rezystancji
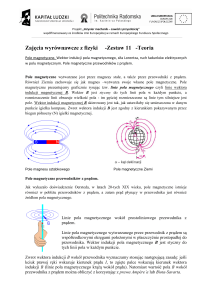
pod wpłystancji. Zjawisko
magnetorezystanbiegunów
ulec zwielokrotnieniu,
tyczneilo��
naszej planety
ulegamagnetycznych
cią- cji polega namog�yby
wem zewnętrznego pola co
magnetyczzmianie rezystancji
głym stopniowym
zmianom,
przewodnika
wykonanego
z materia- nego
∆R, jak iwstała normująca H0
postawi�oby
podjednak
znakiem
zapytania
przydatno��
kompasu
procesynawigacji.
takie są bardzoOsoby,
długotrwa-które
łu ferromagnetycznego,
przez
który
są
zależne
od materiału,
z tego powodu mog�yby zrezygnowa�
z z którego
łe. Ostatnia zmiana kierunku pola przepływa prąd elektrycznym, pod wykonano czujnik magnetorezystanwykonania
kompasu
musimy
w tym
miejscu
miała miejsce
około 750
tysięcy latelektronicznego
wpływem przyłożonego
do niego
cyjny.
Typowe wartości rezystanWprawdzie
magnetyczne
naszej planety
ulega
temu, uspokoi�.
a gdyby miała miejsce
obec- pole
zewnętrznego
pola magnetycznego.
cji R0 są rzędu
setek V lub pojenie, doci�g�ym
jej ukończenia
upłynęłoby zmianom,
W procesie
produkcji
czujnik takie
dynczych
natomiast zakres jej
stopniowym
jednak
procesy
s� kV,
bardzo
i tak jeszcze
kilka tysięcy lat.
Przy- magnetorezystancyjny
jest umieszzmian ∆R
jest stosunkowo
d�ugotrwa�e.
Ostatnia
zmiana kierunku
pola mia�a
miejsce
oko�oniewielnajmniej przez taki okres nie widać czany w silnym polu magnetycz- ki. W przypadku permaloju, który
tysi�cy
lat temu,nym,
a które
gdyby
mia�a
miejsce
do często
jej stosowanym
zatem 750
zagrożenia
dla przydatności
nadaje
materiałowi
stałą obecnie
jest materiałem
uko�czenia
up�yn��oby
i
tak
jeszcze
kilka
tysi�cy
lat.
naszego kompasu.
magnetyzację H wewn, zgodną z kie- do produkcji czujników magnetorerunkiem
przepływu
prądu. Jeśli
∆R wynosi
zatemzystancyjnych
zagro�enia
dla 2...3 %.
Przynajmniej przez taki
okres
nie wida�
Czujniki
pola
magnetycznego
Z
przedstawionego
opisu i zaumieścimy
czujnik
w
zewnętrznym
przydatno�ci naszego kompasu.
Przyjrzyjmy się jeszcze raz przez polu magnetycznym Hzewn, o kierun- leżności na rezystancję wynika, że
chwilę rozkładowi wektora pola ku prostopadłym do kierunku stacharakterystyka standardowego czujCzujniki
magnetycznego
magnetycznego
z rys.pola
2. Można
za- łej magnetyzacji, wypadkowy wek- nika magnetorezystancyjnego jest
uważyć,
że gdybyśmy bylisi�
w stanie
tor natężenia
pola magnetycznego
silnie nieliniowa
i ma bardzo małe
jeszcze
raz przez
chwil� rozk�adowi
wektora
Przyjrzyjmy
zmierzyć
wartości
składowych
tego
H
zostanie
odchylony
o
kąt
β
od
nachylenie
dla
małych
natężeń pól
wyp
pola magnetycznego z rys.
2. Mo�na zauwa�y�, �e gdyby�my byli
pola Hr i Hp, bez trudu moglibyśmy
wektora Hwewn. Kąt odchylenia β bę- zewnętrznych, co oznacza niewielw stanie zmierzy� warto�ci
sk�adowych tego pola
Hr iczujnika
Hp, bez
obliczyć wartość interesującego nas
dzie tym większy, im silniejsze bęką czułość
w tym zakresie.
trudu
mogliby�my
obliczy�
warto��
interesuj�cego
nas
k�ta charakterystyki
kąta azymutu α zgodnie z następu- dzie zewnętrzne pole magnetyczne. W celu linearyzacji
jącą zależnością
orazozwiększenia
czułości
w prak-Hwewn.
Opisane
przedstawiono
na trygonometryczn�:
azymututrygonometryczną:
� zgodnie z nast�puj�c�
zale�no�ci�
Hwypzjawisko
zostanie
odchylony
k�t � od
wektora
rys. 3.
tycznie wykonywanych czujnikach
� � atan2 H rH,� H p zostanie W
�wyniku
b�dzie
tym
wi�kszy
im stosuje
silniejsze
b�dzie
zewn�t
zmiany
wypadkowenie
opisanej
wcześniej
odchylony
o k�t
� od wektora
Hsię
. K�t
odchylenia
wyp
wewn
przyprzy
czym czym
funkcjafunkcja
atan2() sta-atan2()
go wektora
natężenia wersj�
polaOpisane
magnestruktury
standardowej,
lecz struk- na r
magnetyczne.
zjawisko
przedstawiono
stanowi
funkcji
arctg(),
b�dzie
wi�kszy
im silniejsze
b�dzie
zewn�trzne
pole
nowi wersję funkcji �arctg(),
jedno-tym
tycznego
Hwyp, zmienia
się również
turę
zmodyfikowaną,
tzw.nat��enia
strukturę
W
wyniku
zmiany
wypadkowego
wektora
po
jednoznaczn�
w
pe�nym
przedziale
k�tów
od
-180
�
do
+180
�
.
magnetyczne.
Opisane
zjawisko
przedstawiono
3.
znaczną w pełnym przedziale
kątów
rezystancja
czujnika,
co określamy
grzebieniową, wna
którejrys.
na powierzchHwypRe, zmienia
równie�sąrezystanc
magnetycznego
Uzyskan�
nale�a�oby
jeszcze przeliczy�,
tak si�
aby
od –180°
do +180°. warto��
warjako efekt
magnetorezystancyjny.
ni nat��enia
permaloju
umieszczane
pod
WUzyskaną
wyniku
zmiany
wypadkowego
wektora
pola
co
okre�lamy
jako
efekt
magnetorezystancyjny.
tość należałoby
jeszcze
przeliczyć
zystancja
czujnika
wyraża
się
nastękątem
+45°
lub
–45°
wąskie
paski
mie�ci�a
si�
w
przyj�tym
do
okre�lania
azymutu
zakresie
k�tów
magnetycznego Hwyp, zmienia si� równie� rezystancja czujnika, Re
tak aby mieściła się w przyjętym do pującączujnika
zależnością: wyra�a si� nast�puj�c�
aluminium. W zależności
od kąta
zale�no�ci�:
od azymutu
0 do 360
Wymaga
tojako
jedynie
dodania
k�ta ustawienia
pe�negotych
360pasków
�Rezystancja
w uzyskiwana
co�.okre�lamy
efekt
magnetorezystancyjny.
określania
zakresie
kątów
R �si�
R0 � �nast�puj�c�
R
� cos 2 � � R0 � �R �zale�no�ci�:
1 � �jest
H zewnnastępująca
H 0 �2
ujemnej.
przypadku
otrzymania
warto�ci
czujnika
od 0 do
360°. Wymaga
to jedyniewyra�a
zależność rezystandodania
kąta pełnego
360° w przy- 2 kilku
cji od
czujnika
od zewnętrznego
pola
Obecnie
przynajmniej
producentów
ofercie
2 ma w swojej
Zale�no��
rezystancji
prostopadle
przy�o�oneg
R � R0 � �R � cos � � R0 � �R � 1 � �H zewn H 0 �
padku czujniki
otrzymania wartości
ujemnej.
magnetycznego:
odpowiednie
do pola
pomiarów
ziemskiego Hpola
magnetycznego
magnetycznego
jest
okre�lona dla H
�
�
�
�
�
�
zewn przy�o�onego zewn�trznego
zewn
Zale�no�� rezystancji od prostopadle
zwane magnetometrami. Spo�ród
ró�nych
rodzajów
czujników
H
�
H
rezystancja
czujnika
przyjm
warto�ciach
0
pola magnetycznego H zewn jestzewnokre�lona
dla H zewn � H 0 . Przy
nat��enia
pola magnetycznego
przyjrzymy
si�
bli�ej
czujnikom
Elektronika
Praktyczna warto�ciach
4/2007
warto��
równ�
R
minimaln�
Zarówno rezystancja
95
0. przyjmuje
H zewn � H 0 rezystancja
czujnika
sta��,
opartym na efekcie magnetorezystancji.
Zjawisko
zmian
rezystancji
pod
wp�ywem
zewn�trznego
minimaln� warto�� równ� R0. Zarówno rezystancja R0, zakrespola
standardowej, lecz struktur� zmodyfikowan�, tzw. struktur�
grzebieniow�, w której na powierzchni permaloju umieszczane s�
pod k�tem +45� lub -45� w�skie paski aluminium. W zale�no�ci od
k�ta
K U R S ustawienia tych pasków uzyskiwana jest nast�puj�ca
zale�no�� rezystancji czujnika od zewn�trznego pola
magnetycznego:
2
�
�H
�
�H
�R
� �R �� zewn �� 1 � �� zewn ��
2
� H0 �
� H0 �
Zależność ta
ta jest
zbliżona
do
Zale�no��
jest
zbli�ona
do liniowej dla niewielkich
liniowej dla zewn�trznego
niewielkich wartości
warto�ci
pola magnetycznego i ma w tym obszarze
zewnętrznego pola magnetycznego
wi�ksze
nachylenie od charakterystyki czujnika standardowego.
i ma w tym obszarze większe naZale�no�ci
rezystancji
od unormowanego nat��enia zewn�trznego
chylenie od charakterystyki
czujnika
pola
magnetycznego
dla czujnika o strukturze standardowej i o
standardowego.
Zależności rezystancji od unormowanego
natężenia ze- przedstawiono na rys. 4.
strukturze
grzebieniowej
wnętrznego
pola
magnetycznego
dla
mo�e by� uk�ad KMZ51 firmy
Przyk�adem takiego czujnika
czujnika o strukturze standardowej
Philips.
Zawiera
on
czujniki
magnetorezystancyjne ze struktur�
i o strukturze grzebieniowej przedgrzebieniow�.
Jego
budow�
wewn�trzn�
przedstawiono na rys. 5.
stawiono na rys. 4.
KMZ51 takiego
zawiera
mostekRys.
Wheatstone’a
zbudowany
z czterech
Uk�ad
Przykładem
czujnika
5 Budowa wewnętrzna
czujnika KMZ51
może być układ
KMZ51 firmy Phielementów
magnetorezystancyjnych
oraz dwóch cewek: cewki
1. Wybrane parametry
KMZ51
lips. Zawiera on czujniki magnetoTab. 1. czujnika
Wybrane parametry
czujnika KMZ51
przemagnesowuj�cej
i cewki Tab.
kompensacyjnej.
Kierunek
wektora
Jednostka
Lp.
ParametrLp. Parametr
WartośćWarto��
Jednostka
rezystancyjne ze strukturą grzebiezasilania
Napi�cie
pola
magnetycznego
wytwarzanego
przez
cewk�
przemagnesowuj�c�
5
V
1
niową. Jego budowę wewnętrzną
1
Napięcie zasilania mostka
5
V
mostka
czujnika.
jest
zgodnyna zrys.kierunkiem
wewn�trznej magnetyzacji
przedstawiono
5.
mV / V
2
Typowa czu�o�� 16 16
2
Typowa czułość
Układ KMZ51 zawiera mostek
kA / m
3
Zakres pomiarowy
-0,2...+0,2
kA/m
Wheatstone’a zbudowany z czterech
3
Zakres pomiarowy
–0,2...+0,2
kA/m
4
Napi�cie offsetu
-1,5...+1,5
mV/V
elementów magnetorezystancyjnych
4
Napięcie offsetu
–1,5...+1,5
mV/V
oraz dwóch cewek: cewki przemagnesowującej i cewki kompensacyjnej. Kierunek wektora pola magne- zwrotu wewnętrznej magnetyzacji kompasu elektronicznego nie jest
tycznego wytwarzanego przez cew- czujnika (przemagnesowanie czujnitaka prosta. To jeszcze nie wszystkę przemagnesowującą jest zgodny ka) natomiast cewka kompensacyjna
ko. W tym odcinku nie zdołaliśmy
z kierunkiem wewnętrznej magne- umożliwia kompensację zewnętrzpomieścić wszystkich problemów,
tyzacji czujnika. Kierunek wekto- nego pola magnetycznego. Wybrane
będziemy je kontynuować za miera pola wytwarzanego przez cewkę parametry czujnika KMZ51 zestasiąc.
kompensacyjną jest zgodny z osią
wiono w tab. 1.
Piotr Kaniewski
czułości czujnika. Cewka przemaJak widać teoria nieskomplikoJakub Kazubek
gnesowująca umożliwia zmianę wanego, jakby się wydawać mogło,
Piotr Komur
R � R0 �
96
Elektronika Praktyczna 4/2007