Aplikacje LOGO!
Szanowni Czytelnicy
Oddajemy Państwu do rąk podręcznik będący zbiorem praktycznych przykładów
aplikacji modułu logicznego LOGO!. Przedstawione opisy są niewielką częścią
projektów, których opisy przesłali do nas ich twórcy. Mamy nadzieję, że spektrum
przedstawionych zastosowań wyrobi Państwu pogląd na możliwości techniczne
tych małych, a jednocześnie wydajnych modułów sterownikowych. Składamy
serdeczne podziękowania autorom poszczególnych rozwiązań. Jednocześnie
pragniemy podkreślić, że przedstawione przykłady są opublikowane za zgodą ich
twórców, a firma Siemens nie ponosi żadnej odpowiedzialności z tytułu skutków
wynikłych z ich praktycznego zastosowania.
Życzymy przyjemnej lektury i satysfakcji z aplikacji zrealizowanych na bazie
LOGO!.
Siemens Sp. z o.o.
Aplikacje LOGO!
Spis treści
Przykład 1
Transporter
( oprac. Artur Zyskowski )
4
Przykład 2
Automatyczne zasilanie produktem maszyn pakujących
( oprac. Bogdan Radziszewski )
6
Przykład 3
Układ spłukiwania taśm tuneli chłodniczych
( oprac. Bogdan Radziszewski )
8
Przykład 4
Sterowanie stacjonarną zszywarką do worków
( oprac. Cezary Parniewicz )
10
Przykład 5
Sterowanie kotłem gazowym
( oprac.Edward Budzyński )
12
Przykład 6
Sygnalizacja na placu zabaw
( oprac. Jacek Janiak )
16
Przykład 7
Centralka alarmowa
( oprac. Jarosław Tarnawa )
18
Przykład 8
Sterowanie zespołem maszyn przetwórczych
( oprac. Jerzy Syrek )
20
Przykład 9
Układ rozdzielacza butelek na linii produkcyjnej
w rozlewniach napojów
(oprac. Krzysztof Aleksanderek )
22
Przykład 10
Układ sterowania wykrojnika
( oprac. Krzysztof Kulig )
24
Przykład 11
Układ sterowania silnika indukcyjnego pierścieniowego
( oprac. Krzysztof Szewczyk )
26
Przykład 12
Sterowanie maszyną do załadunku skrzynek
( oprac. Marcin Wyrwa )
28
Przykład 13
Sterowanie układem transportowym
( oprac. Marcin Wyrwa )
30
Przykład 14
Sterowanie układem wentylacyjnym dla budownictwa mieszkaniowego
( oprac. Marek Rzerzut )
32
Przykład 15
Samoczynne Ponowne Załączenie (SPZ) na linii 110KV
( oprac. Michał Cuprych)
34
Przykład 16
Automatyczny garaż
( oprac. Remigiusz Kozak )
36
Przykład 17
Automatyzacja szklarni
( oprac. Tomasz Kisielewski )
38
Przykład 18
Automatyzacja samochodu
( oprac. Wojciech Kucharski )
42
Sterowanie ramieniem robota za pomocą LOGO!
( oprac. Wojciech Nowakowski )
46
Przykład 19
Przykład 1
Zastosowanie LOGO!
Transporter
Koncepcja wykorzystania LOGO!
Zaprojektowany układ to ciąg transportowy składający się z
trzech taśmociągów. Ma on za zadanie przetransportować towar (np. skrzynki, palety, pudełka) umieszczony na początku
taśmociągu nr 1 na koniec taśmociągu nr 3. W projekcie założono, że każdy z taśmociągów jest napędzany jednym silnikiem
indukcyjnym trójfazowym.
Opis:
1) Towar jest umieszczany (np. przez człowieka, robota, inny
taśmociąg) na początku taśmociągu
1. Umieszczony towar jest wykrywany przez fotokomórkę B1,
która podaje sygnał “1” na wejście I1 sterownika LOGO!. Program sterownika sprawdza , czy taśmociąg nr 1 nie jest zajęty
przez wcześniej umieszczony towar (czy fotokomórka B2 znajdująca się na końcu taśmociągu nr 1 nie jest “przysłonięta” ) i
uruchamiany jest silnik M1 napędzający taśmociąg nr 1.
2) Przemieszczany towar po dotarciu do końca taśmociągu nr 1
zostaje wykryty przez fotokomórkę B2, która wystawia sygnał
na wejście I2. Następuje sprawdzenie, czy taśmociąg nr 2 nie
jest zajęty. Jeśli nie ma tam towaru, wówczas uruchamiany jest
silnik M2 napędzający taśmociąg nr 2 i towar przemieszcza się z
taśmociągu nr 1 na taśmociąg nr 2. Tak samo wygląda przejście
towaru z taśmociągu nr 2 na taśmociąg nr 3.
3) Towar po dotarciu do końca transportera nr 3 zostaje wykryty przez fotokomórkę B4 (podanie sygnału “1” na wejście I4 ),
co powoduje zatrzymanie silnika M3 napędzającego ten transporter. Ładunek może zostać zdjęty z transportera nr 3 ręcznie
przez człowieka lub poprzez podanie sygnału “1” na wejście I5
np. z przycisku. Jeśli któryś z transporterów jest zajęty przez
towar, program to wykrywa i nie dopuszcza do kolizji – ładunek
jest odpowiednio kolejkowany. Transportery są uruchamiane
i zatrzymywane sygnałami z fotokomórek, dodatkowo w program wbudowany został mechanizm zatrzymywania taśmociągów po określonym , zależnym od długości taśmociągu,czasie.
Ten mechanizm czasowego zatrzymywania ruchu transportera
jest przydatny w momencie, gdy jeden z taśmociągów zostanie
uruchomiony przypadkowo, np. jedna z fotokomórek zostanie
na moment przysłonięta przez przechodzącego człowieka, ścinek papieru, itp.
Funkcje wyprowadzeń:
I1 – wejście dla pierwszego taśmociągu
I2 – wejście dla drugiego taśmociągu
I3 – wejście dla trzeciego taśmociągu
I4 – wejście wyłączające trzeci taśmociąg
I5 – wejście ponownie włączające trzeci taśmociąg
Q1 – wyjście pierwszego taśmociągu
Q2 – wyjście drugiego taśmociągu
Q3 – wyjście pierwszego taśmociągu
Korzyści wynikające z zastosowaniaLOGO!
Możliwość rozbudowy układu o kolejne taśmociągi. Wiele możliwości zastosowań taśmociągu automatyzujących pracę.
Autor:
Artur Zyskowski
Przykład 1
Zastosowanie LOGO!
Transporter
Autor:
Artur Zyskowski
Przykład 2
Zastosowanie LOGO!
Automatyczne zasilanie produktem maszyn pakujących
Koncepcja wykorzystania LOGO!
Zadanie projektowe polegało na wykonaniu sterowania układem przenośników w taki sposób aby zapewnić ciągłość zasilania produktem (mrożonkami) wielogłowicowych wag
automatycznych. Droga produktu zaczyna się od urządzenia
wysypującego mrożonki z kontenerów do zbiornika buforowego. Pod zbiornikiem znajduje się przenośnik wibracyjny W1.
Dodatkowo nad W1 umieszczono układ dysz wodnych zasilanych zaworem elektromagnetycznym Y1. Dysze służą do tzw.
glazurowania mrożonek kalafiora i brokuła. Z W1 mrożonki trafiają na podnośnik P. W celu zmniejszenia kosztów całej inwestycji zastosowano jeden podnośnik P transportujący mrożonki
do podwójnego rewersyjnego przenośnika R1 i R2. Rewersyjny
podwójny przenośnik został umieszczony na podeście wspólnym dla wag. Mrożonki spadają na środek przenośników R 1
i R2, skąd są transportowane do rynnowych przenośników wibracyjnych W2 i W3 . Poziom nasypanych mrożonek do W2 i W3
kontrolują czujniki C1 i C2. Zastosowano tutaj sondy FTC 260
firmy Endress+Hauser .Przenośniki wibracyjne są sterowane
bezpośrednio z wag w zależności od zapotrzebowania na produkt jaki zgłaszają wagi.
Opis:
Przełącznik trójpołożeniowy S służy do wyboru trybu pracy. W
zależności od tego, czy ma pracować jeden automat pakujący
czy dwa wybierana jest odpowiednia pozycja; praca automatu
nr 1, praca automatu nr 2 lub praca obu urządzeń 1 i 2. Rozważmy pracę obu maszyn. Założono, że trzeciej pozycji przełącznika
S odpowiada stan zera logicznego na wejściach I3 i I4. Wówczas
bramki AND B5 i B6 są otwarte dla sygnałów pochodzących od
czujników C1 i C2. Sygnały te mogą być opóźnione przez bloki
on-delay B19 i B21 w celu uzyskania płynnej pracy linii . Jeśli
oba czujniki wykryją brak produktu w rynnach to pojawią się
sygnały logiczne 1 na wejściach SET przerzutników R-S B1 i B2
. Wyjścia przerzutników ustawione zostaną w stany wysokie .
Wyjścia Q1 i Q3 zostaną załączone ponieważ bramki B17 i B8 są
otwarte. Styki przekaźników Q1 i Q3 włączają falowniki F1,F2.
Przenośniki poruszają się w przeciwnych kierunkach nasypując surowiec do W2 i W3. Czujniki C1 i C2 cały czas kontrolują
poziom w rynnach. Gdy C1 wykryje obecność mrożonek to na
wejściu I1 Logo pojawi się logiczne 0.Po zanegowaniu bramką
B3 skasowany zostanie przerzutnik R-S B1 (wyłączony zostanie Q1) ; równocześnie poprzez B13 i B15 załączone zostanie
wyjście Q2. Falownik F1otrzyma sygnał REV i taśma 1 zacznie
obracać się w stronę przeciwną. Analogiczna sytuacja będzie z
czujnikiem C2. W zależności od tempa pracy automatów 1 i 2
taśmy przenośników obracają się więc albo w kierunkach przeciwnych, albo w zgodnych (w lewo lub prawo). Równocześnie
poprzez bramkę OR B9 i dodatkowy układ opóźnienia B10 załączany jest stycznik K1 włączający silnik napędowy podnośnika
P. Z wyjścia Q5 poprzez opóźnienia B22 ,B23 odpowiednio włączany jest elektrozawór Y1 i wibrator W1.
W przypadku przeciążenia silników przenośników rewersyjnych
R1,R2 przekaźniki awarii falowników załączą napięcie+24V do
wejścia I7,I8 co poprzez bramkę OR uruchomi lampkę awarii
H1. Sposób pulsowania zależy od nastawionych parametrów
asynchronicznego generatora impulsów B18.
Funkcje wyprowadzeń:
I1 – Czujnik C1
I2 – Czujnik C2
I3 - ( S1 praca automatu nr.1 )
I4 - ( S1 praca automatu nr.2 )
I6 – ( S3 awaria napędu R1 )
I7 – ( S4 awaria napędu R2 )
Q1 – ( wejście FWD nr.1)
Q2 – (wejście REV nr.1 )
Q3 – ( wejście FWD nr.2 )
Q4 – ( wejście REV nr.2 )
Q5 – ( K1 załączenie podnośnika )
Q6 - ( H1 załączenie lampki )
Q7 – ( Y1 załączenie elektrozaworu wody )
Q8 – (K2 załączenie wibratora W1 )
Korzyści wynikające z zastosowania LOGO!
Realizacja zadania na LOGO! pozwoliła zautomatyzować proces
sterownia przenośników i uzależnić pracę jednego z nich od
stanu pracy drugiego przenośnika. Przyczynia się to do zwiększenia wydajności maszyny oraz pozwala na dostosowanie maszyny dla potrzeb klienta.
Autor:
Bogdan Radziszewski (1)
Przykład 2
Zastosowanie LOGO!
Automatyczne zasilanie produktem maszyn pakujących
Autor:
Bogdan Radziszewski (1)
Przykład 3
Zastosowanie LOGO!
Układ spłukiwania taśm tuneli chłodniczych
Koncepcja wykorzystania LOGO!
Zadanie projektowe polegało na wykonaniu sterowania układem przenośników w taki sposób aby zapewnić ciągłość zasilania produktem (mrożonkami) wielogłowicowych wag
automatycznych. Droga produktu zaczyna się od urządzenia
wysypującego mrożonki z kontenerów do zbiornika buforowego. Pod zbiornikiem znajduje się przenośnik wibracyjny W1.
Dodatkowo nad W1 umieszczono układ dysz wodnych zasilanych zaworem elektromagnetycznym Y1. Dysze służą do tzw.
glazurowania mrożonek kalafiora i brokuła. Z W1 mrożonki trafiają na podnośnik P. W celu zmniejszenia kosztów całej inwestycji zastosowano jeden podnośnik P transportujący mrożonki
do podwójnego rewersyjnego przenośnika R1 i R2. Rewersyjny
podwójny przenośnik został umieszczony na podeście wspólnym dla wag. Mrożonki spadają na środek przenośników R 1
i R2, skąd są transportowane do rynnowych przenośników wibracyjnych W2 i W3 . Poziom nasypanych mrożonek do W2 i W3
kontrolują czujniki C1 i C2. Zastosowano tutaj sondy FTC 260
firmy Endress+Hauser .Przenośniki wibracyjne są sterowane
bezpośrednio z wag w zależności od zapotrzebowania na produkt jaki zgłaszają wagi.
Opis:
Przełącznik trójpołożeniowy S służy do wyboru trybu pracy. W
zależności od tego, czy ma pracować jeden automat pakujący
czy dwa wybierana jest odpowiednia pozycja; praca automatu
nr 1, praca automatu nr 2 lub praca obu urządzeń 1 i 2. Rozważmy pracę obu maszyn. Założono, że trzeciej pozycji przełącznika
S odpowiada stan zera logicznego na wejściach I3 i I4. Wówczas
bramki AND B5 i B6 są otwarte dla sygnałów pochodzących od
czujników C1 i C2. Sygnały te mogą być opóźnione przez bloki
on-delay B19 i B21 w celu uzyskania płynnej pracy linii . Jeśli
oba czujniki wykryją brak produktu w rynnach to pojawią się
sygnały logiczne 1 na wejściach SET przerzutników R-S B1 i B2
. Wyjścia przerzutników ustawione zostaną w stany wysokie .
Wyjścia Q1 i Q3 zostaną załączone ponieważ bramki B17 i B8 są
otwarte. Styki przekaźników Q1 i Q3 włączają falowniki F1,F2.
Przenośniki poruszają się w przeciwnych kierunkach nasypując surowiec do W2 i W3. Czujniki C1 i C2 cały czas kontrolują
poziom w rynnach. Gdy C1 wykryje obecność mrożonek to na
wejściu I1 Logo pojawi się logiczne 0.Po zanegowaniu bramką
B3 skasowany zostanie przerzutnik R-S B1 (wyłączony zostanie Q1) ; równocześnie poprzez B13 i B15 załączone zostanie
wyjście Q2. Falownik F1 otrzyma sygnał REV i taśma 1 zacznie
obracać się w stronę przeciwną. Analogiczna sytuacja będzie z
czujnikiem C2. W zależności od tempa pracy automatów 1 i 2
taśmy przenośników obracają się więc albo w kierunkach przeciwnych, albo w zgodnych (w lewo lub prawo). Równocześnie
poprzez bramkę OR B9 i dodatkowy układ opóźnienia B10 załączany jest stycznik K1 włączający silnik napędowy podnośnika
P. Z wyjścia Q5 poprzez opóźnienia B22 ,B23 odpowiednio włączany jest elektrozawór Y1 i wibrator W1.
W przypadku przeciążenia silników przenośników rewersyjnych
R1,R2 przekaźniki awarii falowników załączą napięcie+24V do
wejścia I7,I8 co poprzez bramkę OR uruchomi lampkę awarii
H1. Sposób pulsowania zależy od nastawionych parametrów
asynchronicznego generatora impulsów B18.
Funkcje wyprowadzeń:
I1 – Czujnik C1
I2 – Czujnik C2
I3 - ( S1 praca automatu nr.1 )
I4 - ( S1 praca automatu nr.2 )
I6 – ( S3 awaria napędu R1 )
I7 – ( S4 awaria napędu R2 )
Q1 – ( wejście FWD nr.1)
Q2 – (wejście REV nr.1 )
Q3 – ( wejście FWD nr.2 )
Q4 – ( wejście REV nr.2 )
Q5 – ( K1 załączenie podnośnika )
Q6 - ( H1 załączenie lampki )
Q7 – ( Y1 załączenie elektrozaworu wody )
Q8 – (K2 załączenie wibratora W1 )
Korzyści wynikające z zastosowania LOGO!
Realizacja zadania na LOGO! pozwoliła zautomatyzować proces
sterownia przenośników i uzależnić pracę jednego z nich od
stanu pracy drugiego przenośnika. Przyczynia się to do zwiększenia wydajności maszyny oraz pozwala na dostosowanie maszyny dla potrzeb klienta.
Autor:
Bogdan Radziszewski (2)
Przykład 3
Zastosowanie LOGO!
Układ spłukiwania taśm tuneli chłodniczych
Autor:
Bogdan Radziszewski (2)
Przykład 4
Zastosowanie LOGO!
Sterowanie stacjonarna zszywarka do worków
Koncepcja wykorzystania LOGO!
Zszywarka do worków umieszczona nad taśmociągiem. Detekcja początku i końca worka następuje przy pomocy fotokomórki lub stycznika. Maszyna przeszywa przemieszczający się po
taśmociągu worek (konieczna jest synchronizacja prędkości
liniowej taśmociągu z wydajnością zszywarki). Po przeszyciu
następuje zatrzymanie się zszywarki i obcięcie nici.
Opis:
Po włączeniu zasilania głównego z opóźnieniem następuje
załączenie WY na fotokomórkę. Gotowość sygnalizowana jest
wyprowadzoną diodą migającą. Opóźnienie ustawione na 30
sek. umożliwia osobie obsługującej zajęcie stanowiska. Przez
pierwsze 30 sek. pojawia się na wyświetlaczu przypomnienie
o konieczności nasmarowania podzespołów. Pojawiający się
worek wyzwala sygnał na fotokomórce przekazywany z dwoma
opóźnieniami.
Pierwsze opóźnienie jest zabezpieczeniem przed krótkimi, przypadkowymi zakłóceniami z otoczenia oraz zabezpieczeniem
przed przypadkowym uruchomieniem przy krótkim pojawieniu
się ręki osoby obsługującej. Drugie opóźnienie jest spowodowane faktem, iż fotokomórka fizycznie musi być umiejscowiona
w pewnej odległości od samych podzespołów szyjących. Zbyt
wczesne uruchomienie zszywarki jest nie ekonomiczne. Worek
opuszcza pole widzenia fotokomórki - z opóźnieniem następuje
wyłączenie zszywarki i krótkotrwałe uruchomienie obcinacza
nici. Opóźnienie jest konieczne, gdyż koniec worka rozpoznawany jest przed zszywarką, więc musi ona jeszcze resztę worka
przeszyć. Pomiędzy zatrzymaniem zszywarki a uruchomieniem
obcinacza zaprogramowane jest minimalne opóźnienie celem
lekkiego naprężenia nitek.
Sygnał o braku nici pojawić się może w każdym momencie,
niezależnie od stanu pracy zszywarki - błąd musi zostać zasygnalizowany, lecz nie można przerwać pracy maszyny w trakcie
trwania cyklu.
Wyjmowanie nie przeszytego worka z maszyny jest bardziej
praco- i czasochłonne. Zatrzymanie automatycznej powtarzalności cykli nastąpi zatem dopiero po pełnym zakończeniu
pojedynczego cyklu – WY fotokomórki zostanie rozwarte, czyli
fotokomórka nie przekaże następnego sygnału.
Konieczne jest usunięcie przyczyny przestoju i restart.
Funkcje wyprowadzeń:
I1 – przewidziane jako sygnał podłączenia źródła zasilania
– uruchomienia maszyny
I2 – wejście sygnałów z fotokomórki
I3 – czujnik nici
I4 – reset licznika
I5 – licznik minus 1
I6 - sygnał serwisowy – wymuszenie chwilowego załączenia
fotokomórki celem jej sprawdzenia (w warunkach zapylenia
konieczne jest częste oczyszczanie i sprawdzanie stanu fotokomórki
- sprawdzenia pracy maszyny, bez konieczności przechodzenia
przez pełny cykl)
Q1 – załączenie fotokomórki - gotowość do pracy (zielona dioda)
Q2 – napęd zszywarki
Q3 – obcinacz nitki
Q4 – wizualna lub akustyczna sygnalizacja braku nitki
Dodatkowe funkcje:
- przypomnienie o smarowaniu przy włączeniu urządzenia
- przypomnienie o smarowaniu po 3h pracy
- przypomnienie o czyszczeniu maszyny przed zakończeniem
pracy (w programie 15:30 – 15:45)
- licznik worków
Korzyści wynikające z zastosowania LOGO!
Zastosowanie taniego i prostego sterownika do sterowania maszyną przemysłową. Możliwość rozbudowania programu oraz
łatwość ewentualnego przeprogramowania maszyny i dostosowanie jej do nowych wymagań.
Autor:
Cezary Parniewicz
10
Przykład 4
Zastosowanie LOGO!
Sterowanie stacjonarna zszywarka do worków
Autor:
Cezary Parniewicz
11
Przykład 5
Zastosowanie LOGO!
Sterowanie kotłem gazowym
Koncepcja wykorzystania LOGO!
Aplikacja została opracowana do sterowania dużym przemysłowym kotłem gazowym. Moduł LOGO! zastosowano przy
modernizacji układów automatyki tego kotła, w miejsce wyeksploatowanych i awaryjnych przekaźników oraz elektromechanicznego programatora krzywkowego. Program LOGO! jest
sporządzony tak, by zachować pierwotny algorytm pracy kotła,
zatem wszystkie jego funkcje sterownicze i zabezpieczeniowe
zostały zachowane bez zmian.
Opis:
Do prawidłowej pracy kotła niezbędne jest spełnienie szeregu
warunków, dlatego układ sterowania kontroluje liczne parametry technologiczne - temperatury, ciśnienia, przepływ wody,
obecność płomienia. Pomiary temperatur realizują mierniki z
czujnikami PT-100. Do pomiarów ciśnień zastosowane są przyrządy z czujnikami tensometrycznymi. Pomiar przepływu przez
kocioł kontroluje przepływomierz zbudowany z zastosowaniem
kryzy pomiarowej i różnicowego czujnika tensometrycznego.
Płomień w kotle nadzoruje przekaźnik z fotoelementem. Na
przyrządach pomiarowych ustawia się wymagane wartości danego parametru, a ich wyjścia (styki wewnętrznych przekaźników) połączone są z odpowiednimi wejściami modułu LOGO!
Ponadto do kolejnych wejść modułu podłączone są przyciski
sterownicze, przełączniki, wyłącznik krańcowy położenia remontowego palnika.
Do uruchomienia i pracy kotła wymagane jest spełnienie szeregu warunków – co uaktywnia znacznik M1. Należy zwrócić
uwagę, że trzy parametry, tzn. wejścia ciśnienia powietrza do
spalania (I9), oraz potwierdzenia zadziałania styczników obydwu wentylatorów (I17, I19) są początkowo blokowane stykiem
przekaźnika czasowego T06. Po uruchomieniu kotła zamykają
styki styczników obydwu wentylatorów i stabilizuje się ciśnienie
powietrza do spalania, następnie po czasie 30 sek. otwiera się
styk T06 i włącza te trzy wejścia w ciąg blokad., a jego przerwanie skutkuje awaryjnym wyłączeniem kotła. Gdy aktywny jest
znacznik M1 można uruchomić kocioł, co załącza znacznik M2.
Styk I2 jest w tym momencie aktywny, gdyż jest do niego podłączony styk przycisku NC. Połączony równolegle z wejściem
I1 styk M2 zapewnia podtrzymanie załączenia po zwolnieniu
przycisku załączającego. Natomiast połączony szeregowo z I1
styk czasowy T12, ma za zadanie uniemożliwić ponowne załączenie przed upływem czasu końcowej wentylacji kotła, jeśli
zostanie on z jakiegokolwiek powodu zatrzymany. Połączone
równolegle styki I18 oraz T11 to układ kontroli płomienia. Jeśli po uruchomieniu w kotle pojawi się płomień, fotoelement
uaktywni wejście I18 i kocioł będzie pracować. Jeśli nie ma płomienia, po upływie czasu T11 nastąpi wyłączenie M2 - rozruch
będzie nieudany, nastąpi awaryjne wyłączenie. Oczywiście taki
sam skutek wywoła ewentualny zanik płomienia w kotle już
pracującym, a także przerwa w blokadach, czyli wyłączenie się
znacznika M1. Jednocześnie z załączeniem znacznika M2 następuje ustawienie przerzutnika RS SF01. Przerzutnik ten służy do
pobudzenia sygnalizacji w przypadkach awaryjnych wyłączeń
kotła.
Programator cyklu pracy kotła to szereg elementów czasowych,
załączających w odpowiedniej kolejności urządzenia kotła. Po
załączeniu sterowania uaktywniony znacznik M2 uruchamia
przekaźniki czasowe: Przekaźnik T04 po 1 sek. załącza wentylator wyciągowy spalin. Następnie, po czasie 3 sek. od startu, T12
uruchamia wentylator nawiewu powietrza do spalania. Należy
zwrócić uwagę, że jako T04 i T12 użyte są przekaźniki typu „ON/
OFF-Delay”, zatem po wyłączeniu obydwa wentylatory będą
jeszcze pracowały odpowiednio przez 30 i 35 sekund, dzięki
czemu zawsze po zatrzymaniu kotła nastąpi końcowa wentylacja i usunięcie z niego spalin i ewentualnych resztek gazu. Kolejny przekaźnik to T06, który po ustabilizowaniu się ciśnienia
nawiewu włącza w obwód blokad kontrolę tego parametru i
kontrolę załączenia styczników wentylatorów. Jednocześnie od
początku cyklu załączony jest przekaźnik czasowy wstępnego
przewietrzania T09. Odmierza on czas 90 sek., po czym załącza
przekaźnik T10, typu „pulse output”, ustawiony na 15 sek. W
tym czasie następuje zapłon tzw. pilota (otwarcie zaworu pilota
i zasilenie transformatora zapłonowego WN z wyjścia Q2). Jeśli
nastąpi zapłon przekaźnik kontroli płomienia uaktywnia wejście I18, kolejno załączające się T11, (nastawiony na 90 sek.)
oraz T14 (nastawiony na ok. 100. sekund) z wyjść Q4, Q5 i Q6
uruchamiają się kolejne zawory. Po tym cyklu, rozruch jest zakończony i praca kotła jest ustabilizowana.
Wymagana temperatura wyjściowa wody z kotła i związana z
tym regulacja ilości podawanego paliwa, określana jest przez
zewnętrzny, niezależny regulator.
Kocioł posiada szereg lampek sygnalizujących stan jego pracy i
przyczyny jego ewentualnego awaryjnego zatrzymania. Kocioł
można zatrzymać przez naciśniecie przycisku STOP, podłączonego do wejścia I2. W takim wypadku następuje wyłączenie
znacznika M2 i jednoczesny reset przerzutnika SF01 (w obwodzie sterowania), zatem wyjście Q1 (sygnalizacja dźwiękowa i
optyczna awarii) pozostaje nieaktywne. Natomiast jeżeli kocioł
zatrzyma się z innej przyczyny (przerwa w ciągu blokad, czyli
sytuacja awaryjna), po wyłączeniu się M2, poprzez zamknięty
styk przerzutnika SF01 uaktywni się wyjście Q1 i załączy buczek
i lampkę sygnalizujące awarię. Kasowanie tego sygnału następuje przez naciśnięcie przycisku STOP.
Przy awaryjnym zatrzymaniu uruchomi się także odpowiednia
lampka informująca o przyczynie
tego zdarzenia. W sygnalizacji optycznej pominięto niektóre
możliwe, lecz oczywiste i łatwo zauważalne przyczyny awarii
(np. zatrzymanie się któregoś z wentylatorów). Dla kontroli
działania sygnalizacji wszystkie wyjścia sygnalizacyjne mogą
być pobudzone z przycisku dołączonego do wejścia I6.
Autor:
Edward Budzyński
12
Przykład 5
Zastosowanie LOGO!
Sterowanie kotłem gazowym
Funkcje wyprowadzeń:
I 1 - Przycisk uruchamiania kotła (NO).
I 2 - Przycisk zatrzymywania kotła (NC).
I 3 - Przycisk włączania wentylatora wyciągowego spalin
I 4 - Przełącznik rodzaju pracy, styk 1.
I 5 - Przełącznik rodzaju pracy, styk 2.
I 6 - Przycisk kontroli sygnalizacji dźwiękowej i optycznej - próba
lampek i buczka (NO).
I 9 - Kontrola ciśnienia powietrza do spalania, wytwarzanego
przez wentylator nadmuchu.
I 10 - Ciśnienie spalin w kotle. Kontrola tego ciśnienia zapobiega
przedostawaniu się spalin do pomieszczenia kotłowni.
I 11 - Sygnał zbyt niskiego ciśnienia gazu
I 12 - Sygnał zbyt wysokiego ciśnienia gazu
I 13 - Sygnał przekroczenia maksymalnej dozwolonej temperatury wody na wylocie z kotła.
I 14 - Kontrola ciśnienia sprężonego powietrza.
I 15 - Sygnał spadku przepływy wody przez kocioł poniżej minimalnej wymaganej wielkości.
I 16 - Wyłącznik krańcowy
I 17 - Styk pomocniczy stycznika wentylatora nadmuchu powietrza do
I 18 - Wejście przekaźnika kontroli płomienia.
I 19 - Styk pomocniczy stycznika wentylatora wyciągowego spalin
Q1 - Uruchomienie lampki i sygnalizatora akustycznego w przypadku samoczynnego (awaryjnego) zatrzymania pracy kotła.
Q2 - Otwarcie zaworu pilotującego i załączenie transformatora
zapłonowego WN.
Q3 - Zamknięcie zaworu odpowietrzającego i otwarcie głównego zaworu gazowego.
Q4 - Uruchomienie zaworu regulacyjnego.
Q5 - Zawór wydajności palnika. Zawór ten określa odpowiednią
dla ustalonej temperatury dawkę gazu.
Q6 - Włączenie stycznika wentylatora wyciągowego spalin.
Q7 - Włączenie stycznika wentylatora nadmuchu powietrza do
spalania.
Q8 - Lampka sygnalizacyjna płomienia w kotle.
Q9 - Lampka sygnalizująca zbyt niskie ciśnienie powietrza do
spalania.
Q10 - Lampka sygnalizująca nadmierny wzrost ciśnienia spalin
w kotle.
Q11 - Lampka sygnalizująca niewłaściwe parametry gazu zasilającego kocioł.
Q12 - Lampka informująca o niewłaściwych ustawieniach parametrów kotła
Q13 - Lampka informująca o przekroczeniu dopuszczalnej temperatury wody w kotle.
Q14 - Lampka sygnalizująca spadek ciśnienia w instalacji pneumatycznej
Q15 - Lampka sygnalizująca zbyt mały przepływ wody w kotle.
Q16 - Lampka sygnalizująca wyłączenie sterowania (zatrzymanie kotła).
Korzyści wynikające z zastosowania LOGO!
Zastosowanie sterownika LOGO! umożliwiło zastąpienie starej instalacji opartej na przekaźnikach i elektromechanicznym
programatorze krzywkowym. Wyeliminowało to awarie pracy
kotła spowodowane mechanizmem sterującym.
Autor:
Edward Budzyński
13
Przykład 5
Zastosowanie LOGO!
Sterowanie kotłem gazowym
Autor:
Edward Budzyński
14
Przykład 5
Zastosowanie LOGO!
Sterowanie kotłem gazowym
Autor:
Edward Budzyński
15
Przykład 6
Zastosowanie LOGO!
Sygnalizacja na placu zabaw
Koncepcja wykorzystania LOGO!
Układ sygnalizacji został zaprojektowany z myślą zastosowania go w sali zabaw w celu zwiększeniabezpieczeństwa oraz
ułatwienia opiekunom dozoru nad dziećmi podczas zabawy.
Sygnalizacja jest automatyczna i obejmuje swym działaniem
labirynt rur oraz zjeżdżalnię i inne urządzenia placu zabaw, w
których jednocześnie nie powinno znajdować się więcej niż jedno dziecko.
Opis:
Działanie sygnalizatorów znajdujących się po obu stronach wejścia polega na zmianie sygnałów świetlnych zielonego i czerwonego, podobnie jak ma to miejsce w ruchu drogowym (kolor
zielony – droga wolną, czerwony - stop). Ma to również dodatkowe znaczenie edukacyjne oraz zwiększa atrakcyjność zabawy. Układ uzupełniają sygnalizatory dźwiękowe wyzwalane w
chwili próby wejścia na czerwonym świetle z jednej lub z drugiej
strony. Układ sterujący został ulokowany poza placem zabaw,
natomiast sygnalizatory i czujniki (zasilanie napięciem 12V DC)
zostały ulokowane w miejscach niedostępnych dla dzieci.
Po dwa komplety czujników optycznych umieszczone są przy
każdym wejściu - tworząc sąsiadujące ze sobą dwie bariery
optyczne, umożliwiające rozróżnienie kierunku - wejścia lub
wyjścia dziecka jednocześnie po obu stronach. W zależności
od tego, które wiązki światła podczerwieni zostały przecięte,
sterownik steruje przekaźnikami załączającymi odpowiednie
światło sygnalizacji. W przypadku próby wejścia obojętnie z
której strony na sygnale czerwonym zostaje uruchomiona sygnalizacja dźwiękowa. Zastosowane wysokiej jakości czujniki optyczne działają natychmiastowo i aby nie dopuszczać do wzbudzania się układu oraz błędnego działania sygnalizacji - wejścia
sterownika ustawiono z pewną zwłoką. Również w przypadku
celowego naruszania wejść na sygnale czerwonym lub w przypadku awarii układu ograniczono czas sygnału dźwiękowego
do kilku sekund. W przypadku tzw. „oszukania” logiki układu i
ustawienia się sygnału czerwonego, gdy we wnętrzu rury nie
ma dziecka, co może mieć miejsce np. przy nie przestrzeganiu
zasad zabawy przez dzieci lub konserwacji i sprzątaniu placu
zabaw, układ samoczynnie po kilku minutach wykona „reset”.
Układ nie wykona „resetu” i nie przywróci sygnału zielonego
w przypadku naruszania fotokomórek – musi nastąpić co najmniej 5 minutowa przerwa w ich pobudzaniu (czas ustawiany
doświadczalnie w zależności od rodzaju układu placu zabaw).
Funkcje wyprowadzeń:
I1, I2, I3, I4 – wejścia czujników optycznych
Q1,Q3 – przekaźnik sygnalizacji świetlnej
Q2,Q4 – sygnalizacja dźwiękowa
Korzyści wynikające z zastosowania LOGO!
Zwiększenie bezpieczeństwa bawiących się dzieci. Możliwość
i łatwość dostosowania aplikacji do danego placu zabaw przez
dodanie czujników lub sygnalizatorów świetlnych, w zależności
od ilości urządzeń wymagających zabezpieczenia.
Autor:
Jacek Janiak
16
Przykład 6
Zastosowanie LOGO!
Sygnalizacja na placu zabaw
Autor:
Jacek Janiak
17
Przykład 7
Zastosowanie LOGO!
Centralka alarmowa
Koncepcja wykorzystania LOGO!
Aplikacja wykorzystuje LOGO! jako centralkę alarmową, którą
można wykorzystać w domu lub firmie. Alarm jest dezaktywowany cyfrowym kodem, który jeśli zostanie wpisany błędnie 3
razy blokuje kolejne próby wpisania kodu.
Opis:
Po włączeniu zasilania sterownika centralka przechodzi automatycznie w stan czuwania. Jeśli zostanie naruszone wejście
bezzwłoczne (I1...I4), na wyjściu bramki B001 (OR) pojawi się
“jedynka”. Po przejściu przez bramkę B003 uruchomi układ
czasowy B004. Na jego wyjściu pojawi się stan wysoki, który
będzie się tam utrzymywał przez zaprogramowany czas, niezależnie od tego, czy wejście bezzwłoczne nadal będzie aktywne, czy nie. Na wyjściu Q1 pojawi się “jedynka”, sygnalizująca
trwanie alarmu. Natomiast na wyjściu Q2 pojawi się przebieg
prostokątny o zaprogramowanej długości impulsu i przerwy,
który może być wykorzystany np. do sygnalizacji. Jeśli naruszone zostanie wejście zwłoczne I5, zostanie uruchomiony układ
czasowy B002, odmierzający czas na wejście. Jednocześnie zostanie aktywowany wyświetlacz, na którym pojawi się pozostały do aktywacji alarmu czas i liczbakod (wyświetlacz można też
aktywować przyciskiem C2). Naciskając przycisk C1 zwiększa
się stan licznika B008 (przycisk C2 kasuje zawartość licznika,
a przycisk C4 potwierdza wpisany kod). Jeśli zawartość licznika
będzie się zgadzała z zaprogramowaną wartością, to na wyjściu tego licznika (B008) pojawi się stan wysoki, jeśli przy tym
stan licznika B010 będzie <=3 i zostanie naciśnięty przycisk potwierdzający liczbę (C4) to na wyjściu bramki AND B009 pojawi
się krótki dodatni impuls (dzięki układowi B011), co spowoduje
ustawienie przerzutnika B006. Na jego wyjściu pojawi się stan
wysoki, który zablokuje pracę (i zresetuje) układów czasowych
B004, B002, zresetuje przerzutnik B012, wyzeruje licznik B010 i
B008 (przez B015). Centralka zostanie wyłączona. Aby uzbroić
centralkę, należy nacisnąć przycisk C3, co spowoduje uruchomienie układu czasowego B013, odmierzającego czas na wyjście. Po upływie tego czasu na wyjściu układu B013 pojawi się
impuls resetujący przerzutnik B006, na którego wyjściu pojawi
się stan niski. Obwód hasła wyłączającego centralkę posiada
zabezpieczenia: nie można trzymać naciśniętego przycisku
potwierdzającego C4, ponieważ jego naciśnięcie powoduje
pojawienie się impulsu, a nie stałego stanu wysokiego, dzięki licznikowi B010 liczba prób jest ograniczona do trzech – po
przekroczeniu tej liczby, na jego wyjściu pojawi się stan niski,
który zablokuje bramkę AND B009. Jeśli pomyłka nastąpi więcej
niż 3 razy, to jedynym wyjściem w celu skasowania licznika błędów jest wyłączenie i włączenie zasilania centralki.
Funkcje wyprowadzeń:
I1, I2, I3, I4 – wejścia bezzwłoczne załączające alarm
I5 – wejście zwłoczne umożliwiające wpisanie kodu dezaktywującego centralkę
Q1 – sygnalizacja trwania alarmu
Q2 – wyjście do którego można podpiąć sygnalizator (np. świetlny) informujący o trwaniu alarmu
Korzyści wynikające z zastosowania LOGO!
Zbudowanie systemu alarmowego na bazie sterownika LOGO!
daje możliwości przystosowania go do własnych potrzeb oraz
umożliwia ewentualne późniejsze przeprogramowanie instalacji. Wykonana samodzielnie aplikacja z powodzeniem może
zastąpić systemy alarmowe firm specjalizujących się w budowaniu tego typu systemów.
Autor:
Jarosław Tarnawa
18
Przykład 7
Zastosowanie LOGO!
Centralka alarmowa
Autor:
Jarosław Tarnawa
19
Przykład 8
Zastosowanie LOGO!
Sterowanie zespołem maszyn przetwórczych
Koncepcja wykorzystania LOGO!
Zadaniem sterownika LOGO! jest: kontrola ilości surowca w
trzech współpracujących ze sobą maszynach przetwórczych,
automatyczne sterowanie zasypem surowców (różnych rodzajów) do poszczególnych maszyn, kontrola ich poziomu w
zbiornikach, ochrona przed awarią napędów maszyn, kontrola stanów awaryjnych poszczególnych elementów układu
oraz zewnętrznych sygnałów świadczących o awarii i sygnalizacja świetlna i dźwiękowa stanów awaryjnych.
Opis:
Moduł kontroli ilości surowca i sterowania zasypem (MKSS):
do wejść I 1-3 podłączone są czujniki poziomu surowca
w zasobnikach maszyn M-1, M-2 i M-3, czujniki są NO gdy
surowiec jest w zasobniku i przełączają się w stan NC gdy
poziom surowca jest niewystarczający. W celu umożliwienia
wyłączania poszczególnych sekcji zastosowano wyłączniki podłączone w szereg z czujnikami. Zadziałanie któregokolwiek z czujników powoduje przez wyjście Q1 załączenie
stycznika S1 dmuchawy bocznokanałowej (element ssący)
oraz poprzez wyjście Q2, Q3 lub Q4 odpowiedniego elektrozaworu kierującego strumień surowca do danej maszyny,
do której przypisany jest czujnik. W celu niedopuszczenia
do włączenia się wszystkich elektrozaworów jednocześnie
zbudowano hierarchię zasypu: aktywne I1 blokuje Q3 i Q4,
a I2 blokuje Q4, aktywne I3 nie blokuje niczego. Tak więc
najwyżej w hierarchii stoi maszyna M-1, dalej M-2, a na końcu M-3. Skutkiem takiego rozwiązania maszyna M-1 otrzyma natychmiast surowiec (po uaktywnieniu I1) nawet jeśli
w tym samym czasie jest zasypywana M-2 lub M-3. Zasyp
maszyny M-2 może blokować nasyp M-3 lecz nie M-1. Zasyp
M-3 może być blokowany przez zarówno M-1 jak i M-2. W
celu wyeliminowania częstych włączeń i wyłączeń zastosowano elementy opóźnienia czasowego, które mają za zadanie podtrzymanie zasypu przez określony czas po zasypaniu
czujnika poziomu surowca.
Wyjście elementu B034 podłączone jest do MKAS - Modułu Kontroli stanów Awaryjnych i ich Sygnalizacji (elementy:
I15, B0007, B0011, B0022-0025, Q8-9), który monitoruje
czas zasypu. Zasyp danej maszyny musi się zakończyć przed
upływem czasu określonego parametrami elementu B007.
Po upływie tego czasu, w sytuacji awaryjnej, MKAS ma za
zadanie powiadomić o tym obsługę sygnałem dźwiękowym
(syrena) i świetlnym (czerwona migająca lampa). Wejście I15
służy do ręcznego blokowania sygnałów awarii w momencie, kiedy obsługa rozpozna problem i podejmie odpowiednie działania celem jego usunięcia.
Moduł kontroli ilości dodatków do surowca (MKD): czujniki
poziomu podłączone są do wejść I4-6. Wyłączanie poszczególnych sekcji rozwiązano identycznie jak w MKSS. MKD
współpracuje również z MKAS poprzez elementy B0022 i
Q8. Jak widać ze schematu nie ma tutaj elementów opóźnienia czasowego – reakcja układu jest natychmiastowa i w celu
wyeksponowania tego faktu – prócz syreny – MKD wykorzystuje światło żółte. Do tej części MKAS podłączono również
moduł MSA (Moduł innych Stanów Awaryjnych) - wejścia:
I12-14, które mogą być zastosowane dowolnie n.p. do syg-
nalizowania innych stanów awaryjnych zespołu maszyn
– pod warunkiem zastosowania odpowiednich czujników.
Do I12 oraz I13 podłączone są dodatkowe układy składające
się z elementów: B042, B055, B056, B057, M4, M5. Układy
te przy pomocy wyjść Q11, Q12 dodatkowo sygnalizują miejsce powstania awarii. Kolejnym ważnym układem jest MKB
(Moduł Kontroli i Blokady napędów) składający się z elementów: AI1–3, I9–11, B0039-0041, B0043-0048, B0050-0051,
B0054, B0059, Q5–7. Układ ten zabezpiecza silniki główne
napędów maszyn przed uszkodzeniem poprzez włączenie
ich do sieci energetycznej, gdy nastawy prędkości obrotowej mogą mieć różne od zera wartości. Zadanie to zrealizowano poprzez blokadę możliwości włączenia do sieci napędu w momencie innym niż gdy wartość napięcia na suwaku
potencjometru regulacji prędkości obrotowej jest różna niż
0 V. W celu realizacji tego zadania konieczne stało się wykorzystanie wejść LOGO! Basic I7 i I8 jako wejść analogowych
oraz doposażenie układu o moduł LOGO! AM2. Wejścia te
oznaczone jako AI1, AI2, AI3 monitorują potencjał na suwakach potencjometrów i poprzez elementy układu blokują
możliwość uruchomienia stycznika danego napędu. Są to
trzy niezależne od siebie układy. Jeżeli do wejścia AI1 przyłożony będzie potencjał zerowy to wyjście przekaźnikowe
Q5 włączone w obwód zasilania cewki stycznika M-1 zezwoli na jego uruchomienie. Zestyk pomocniczy stycznika (po
uruchomieniu) blokuje MKB poprzez wejście I9 i umożliwia
regulację obrotów silnika napędowego w trakcie normalnej
pracy. W przypadku gdyby – w momencie uruchamiania –
potencjał na wejściu AI1 wynosił więcej niż zero (stan niedopuszczalny) układ blokuje Q5 uniemożliwiając uruchomienie
maszyny. Pozostałe dwa układy zachowują się analogicznie.
Wszystkie trzy układy podłączone są oczywiście do MKAS w
celu zasygnalizowania stanu niedopuszczalnego.
Funkcje wyprowadzeń:
I1, I2, I3 – kontrola poziomu surowca w M-1, M-2, M-3
I4, I5, I6 – kontrola poziomu dodatków surowcowych
w M-1, M-2, M-3
I9, I10, I11 – blokada startu M-1, M-2, M-3
I12-14 – alarmy zewnętrzne
I15 – blokada alarmu
AI1, AI2, AI3 – zadajnik prędkości w M-1, M-2, M-3
Q1 – stycznik ssawy bocznokanałowej
Q2, Q3, Q4 – elektrozawór M-1, M-2, M-3
Q5, Q6, Q7 – cewka stycznika M-1, M-2, M-3
Q8 – wyjście alarmu dla syreny
Q9 – wyjście alarmu (dla surowca)
Q10 – wyjście alarmu (dla koncentratu)
Q11, Q12 – alarmy zewnętrzne
Korzyści wynikające z zastosowania LOGO!
W powyższym przykładzie LOGO! steruje typowo przemysłową
aplikacją. Sterownik utrzymuje poziom surowca w poszczególnych maszynach oraz dba o bezawaryjne działanie poszczególnych urządzeń. LOGO! okazało się tu rozwiązanie najprostszym
i jednocześnie korzystnym ekonomicznie.
Autor:
Jerzy Syrek
20
Przykład 8
Zastosowanie LOGO!
Sterowanie zespołem maszyn przetwórczych
Autor:
Jerzy Syrek
21
Przykład 9
Zastosowanie LOGO!
Układ rozdzielacza butelek na linii produkcyjnej w rozlewniach napojów
Koncepcja wykorzystania LOGO!
Wąskim gardłem linii napełniania butelek była maszyna do nakładania folii termokurczliwej, której wydajność była o 50% niższa niż wydajność reszty linii produkcyjnej. W celu zapewnienia
100% wydajności zastosowano 2 takie maszyny co wymusiło konieczność rozdzielenia jednej linii przesyłowej butelek na dwie.
Zastosowany sterownik LOGO! steruje ruchomą płetwą rozdzielającą linię przed maszynami i drugą płetwą – łączącą dwie linie
z powrotem w jedną za maszynami.
Opis:
Do wejść sterownika dołączone są czujniki wykrywające obecność butelek zarówno za maszynami do nakładania rękawków
jak i przed nimi, które sygnalizują powstanie przepełnienia na
transporterach i zatrzymanie pracy maszyny lub włączenie stopera uniemożliwiającego wprowadzenie butelek do rozlewaczki.
W celu realizacji funkcji cyklicznego przełączania płetw przed i
za sleevitami (maszynami do nakładania folii termokurczliwej) w
programie wykorzystano funkcje generatora asynchronicznego
T009 i T002. Ze względu na możliwość wystąpienia konfliktu w
postaci blokowania się butelek przy wprowadzaniu na jeden tor
w trakcie otwierania bramek wprowadzono dodatkowe opóźnienia tak aby potoki butelek z poszczególnych linii były wzajemnie
opóźnione (timery T003 i T005). Załączenie alarmu dźwiękowego jest określone na ok. 30s (timer T008) pomimo, że przyczyna, która go wywołała mogła nie ustąpić. Takie potraktowanie
wywoływania alarmu jest podyktowane uciążliwością hałasu
jaki zazwyczaj występuje w halach produkcyjnych. Oczywiście
w momencie kiedy przyczyna alarmu zostanie zlikwidowana w
trakcie jego trwania on sam automatycznie zostanie wyłączony.
W projekcie przewidziano również możliwość pracy tylko z jedną
maszyną do nakładania rękawków np. w przypadkach kiedy trzeba zmienić rolkę z rękawkami lub sytuacjach awaryjnych.
Funkcje wyprowadzeń:
I1, I2, I3, I4, I5 – sygnały z czujników informujące o przepełnieniu
na transporterach
I6, I7 – przełączanie trybów pracy linii (pracująca 1 linia, pracująca 2 linia, pracujące obie linie)
Q1 – linia 1 otwarta
Q2 – linia 2 otwarta
Q3 – przełączanie podawania butelek na linie 1 i 2
Q4 – sygnalizacja alarmu przy zablokowanej linii
Q5 – zatrzymanie sleevita na linii 1
Q6 – zatrzymanie sleevita na linii 2
Q7 – załączenie stopera wejściowego rozlewaczki
Korzyści wynikające z zastosowania LOGO!
Zastosowanie sterownika LOGO! wraz z modułem rozszerzeń
DM8 całkowicie wystarczyło do sterowania ruchomą płetwą.
Dzięki podziale linii na 2 maszyny wydajność systemu wynosiła
100%.
Autor:
Krzysztof Aleksanderek
22
Przykład 9
Zastosowanie LOGO!
Układ rozdzielacza butelek na linii produkcyjnej w rozlewniach napojów
Autor:
Krzysztof Aleksanderek
23
Przykład 10
Zastosowanie LOGO!
Układ sterowania wykrojnika
Koncepcja wykorzystania LOGO!
Sterownik LOGO! zastąpił trzydziestoletni układ sterowania maszyny przemysłowej. Zadaniem urządzenia jest wytłaczanie z
blaszanych ośmiokątów miniaturowych skrzynek. Elementem
tnącym jest precyzyjny wykrojnik poruszany siłownikiem pneumatycznym.
Opis:
Do magazynka maszyny dostarcza się blaszane ośmiokąty (ułożone jeden na drugim), a z odbiornika wyjmuje się gotowe detale. Dwa siłowniki pneumatyczne są sterowane za pomocą sterownika LOGO! Pierwszy z nich (S CYL) podaje detal do obszaru
roboczego i jest sterowany elektrozaworem Q1 – podanie napięcia wysuwa siłownik, odłączenie napięcia cofa siłownik. Drugi
siłownik jest sterowany z dwóch elektrozaworów – Q2 wysuwa
siłownik, Q3 cofa. Warunkiem rozpoczęcia operacji jest prawidłowe ułożenie blaszki. Najpierw podawany jest detal poprzez wysunięcie siłownika S CYL. Po osiągnięciu właściwego położenia
(czujnik I2) rozpoczyna się ruch siłownika B CYL – wycinanie i
wyginanie produktu. Następnie obydwa siłowniki zostają wycofane, a elektrozawór Q4 uruchamia wydmuch detalu i wiórów po
obcinaniu blaszki.
Funkcje wyprowadzeń:
I1, I2, I3, I4 – sensory sygnalizujące położenie detalu
I5 – czujnik położenia osłony bezpieczeństwa
I6 – sygnał stopu
I7 – przycisk startu
Q1 – wypchnięcie detalu do obszaru roboczego
Q2 – wykrojnik w dół
Q3 – wykrojnik w górę
Q4 – wydmuch gotowego detalu
Korzyści wynikające z zastosowania LOGO!
Za pomocą kilku prostych funkcji została wysterowana maszyna
przemysłowa wymagająca dużej precyzji działania. Przestarzały
układ sterowania został zmodernizowany i dzięki temu maszyna
pomimo swoich lat może dalej prawidłowo funkcjonować.
Autor:
Krzysztof Kulig
24
Przykład 10
Zastosowanie LOGO!
Układ sterowania wykrojnika
Autor:
Krzysztof Kulig
25
Przykład 11
Zastosowanie LOGO!
Układ sterowania silnika indukcyjnego pierścieniowego
Koncepcja wykorzystania LOGO!
Zadaniem LOGO! było sterowanie silnikiem w następujących trybach: Prosty rozruch silnika, Rozruch silnika z uwzględnieniem
prędkości kątowej wirnika, Hamowanie poprzez wybieg, Hamowanie dynamiczne silnika.
Opis:
Rozruch prosty (czasowy) silnika pierścieniowego dokonuje się
przy włączonych w obwód rezystorach rozruchowych. Rezystor
rozruchowy Rr ma zwykle kilka stopni, umożliwiających w miarę wzrostu prędkości obrotowej wirnika przechodzenie na coraz
inną charakterystykę M=f(s) odpowiadającą coraz innej wartości
rezystancji Rr. Przy rozruchu liczba stopni rozruchowych zwykle nie przekracza 4. Ten sposób jest stosowany w przypadku,
gdy silnik indukcyjny jest od razu obciążony dużym momentem
hamującym. Przyciśnięcie przycisku chwilowego zwiernego,
do którego podłączone jest wejście I1 określa rodzaj rozruchu
- rozruch czasowy. Dodatkowo wymagane jest określenie kierunku wirowania: wejście I5 (lewo), wejście I6(prawo). Jeżeli te
warunki zostaną spełnione zostaje załączona sekwencja rozruchowa zaczynając od rezystancji wirnika o wartości 4R. Timer
B029 określa czas załączenia tej rezystancji. Po osiągnięciu przez
timer zadanego czasu następuje przełączenie rezystancji wirnika na wartość 3R za pomocą stycznika oraz wyzwalany zostaje
Timer B030. Proces kolejnych przełączeń został zrealizowany,
aż do chwili osiągnięcia wyjścia Q7 oznaczającego pracę silnika
bez włączonych dodatkowych rezystancji w obwodzie wirnika
(zwarty). Czasy pomiędzy wszystkimi przełączeniami są przykładowymi czasami pozwalającymi zobrazować zjawisko przełączania kolejnych timerów.
Rozruch prędkościowy, w przeciwieństwie do rozruchu czasowego, zamiast kolejno uruchamianych timerów, które przełączają
rezystancje wirnika zastosowano pomiar prędkości poprzez dodatkowy moduł analogowy. Warunkiem przełączenia rezystancji jest osiągnięcie odpowiedniej prędkości kątowej, która w
sterowniku reprezentowana jest poprzez liczbę z zakresu 0 do
1000. Progi prędkości zostały ustalone przykładowo i wynoszą
odpowiednio: prędkość od 0 do 199 - 4R, od 200 do 399 - 3R, od
400 do 599 - 2R, od 600 do 799 - R i od 800 – 0. Wybór tego typu
rozruchu dokonywany jest poprzez wciśnięcie przycisku podłączonego do wejścia I2.
Hamowanie wybiegiem jest najprostszym sposobem hamowania. Po wybraniu tego rodzaju hamowania przyciskiem I3 i następnie naciśnięciu przycisku I7 (stop) odłączane jest zasilanie
stojana, załączana jest rezystancja 4R. Po osiągnięciu przez silnik
obrotów mniejszych niż 10 (zakres 0-1000) następuje odłączenie
rezystancji 4R.
W przypadku hamowania dynamicznego proces początkowo
przebiega podobnie. Po naciśnięciu przycisku wyboru hamowania dynamicznego I4 oraz przycisku I7 (stop) następuje odłączenie zasilania stojana, załączana jest rezystancja 4R. Dodatkowo
załączany jest obwód prądu stałego do zacisków stojana oraz
następuje start Timera B060, który to po 500ms załącza zasilanie prądu stałego. Po osiągnięciu przez wirniki prędkości (0-10)
następuje wyłącznie zasilania prądu stałego a po czasie 500ms
następuje odłącznie obwodu.
Funkcje wyprowadzeń:
I1 – rozruch czasowy
I2 – rozruch prędkościowy
I3 – hamowanie wybiegiem
I4 – hamowanie dynamiczne
I5 – kierunek obrotów w lewo
I6 – kierunek obrotów w prawo
I7 – przycisk stopu
AI – pomiar prędkości kątowej
Q1 – wirowanie w lewo
Q2 – wirowanie w prawo
Q3 – załączenie rezystancji o wartości 4R
Q4 – załączenie rezystancji o wartości 3R
Q5 – załączenie rezystancji o wartości 2R
Q6 – załączenie rezystancji o wartości R
Q7 – załączenie rezystancji o wartości 0
Q8 – załączenie zasilania obwodu prądu stałego do zacisków stojana
Q9 – załączenie zasilania obwodu prądu stałego
Korzyści wynikające z zastosowania LOGO!
Dzięki zastosowaniu LOGO! do sterowania silnikiem możliwe
jest sterowanie i kontrola wszystkich parametrów pracy silnika.
Można zrealizować pełne zabezpieczenie przeciw przepięciowe
silnika.
Autor:
Krzysztof Szewczyk
26
Przykład 11
Zastosowanie LOGO!
Układ sterowania silnika indukcyjnego pierścieniowego
Autor:
Krzysztof Szewczyk
27
Przykład 12
Zastosowanie LOGO!
Sterowanie maszyna do załadunku skrzynek
Koncepcja wykorzystania LOGO!
Sterownik LOGO! wykorzystany został do sterowania maszyną składającą się z trzech transporterów, wagi oraz czujników.
Zadaniem maszyny jest napełnianie skrzynek do zadanej wagi
produktów.
Opis:
Naciśnięcie przycisku Start powoduje załączenie przerywanego
co 1 sekundę sygnału dźwiękowego (Q5). Sygnał ostrzegawczy
trwa 6 sekund. Po kolejnych paru sekundach (zależne od ustawienia) następuje uruchomienie silnika M2 (Q2) napędzającego
transporter skrzynek. Gdy pusta skrzynka znajdzie się na wadze,
czujnik optyczny CZ1 sygnalizuje ten fakt sygnałem na wejściu
I2 sterownika. Zatrzymany zostaje silnik M2. Po dwóch sekundach od momentu zadziałania czujnika CZ1 uruchomiony zostaje silnik M1 (Q1) napędzający transporter produktów. Produkty
ładowane są do skrzynki znajdującej się na wadze. Ładowanie
trwa do momentu zadziałania alarmu zadanej wagi CZ2 (I3). Gdy
waga osiągnie zadaną wartość, zatrzymany zostaje silnik M1. Po
2 sekundach włączony zostaje na 1 sekundę siłownik (Q4) spychający skrzynkę na transporter napędzany silnikiem M3 (Q3).
Gdy czujnik CZ1 wykryje brak skrzynki na wadze to po dwóch
sekundach uruchomiony zostaje silnik M2 i M3. Silnik M3 napędzający transporter załadowanych
skrzynek, będzie włączony do momentu gdy skrzynka znajdzie
się na końcu transportera (czujnik CZ3 - I4). Po odebraniu załadowanej skrzynki z transportera, czujnik CZ3 przestaje być aktywny i po dwóch sekundach silnik M3 ponownie jest uruchomiony. Jeśli czujnik CZ3 nie wykryje żadnej skrzynki w czasie 30
sekund, to zostaje wyłączony. Przycisk STOP zatrzymuje aktualnie wykonywany proces transportu. Jeśli przycisk Stop zostanie
naciśnięty w chwili, gdy jeszcze nie jest uruchomiony silnik M1
wtedy proces zostaje całkowicie zatrzymany. Jeśli przycisk Stop
zostanie naciśnięty podczas załadunku (M1 – włączony) to zostaje wyłączony załadunek – (M1 – stop), a następnie po dwóch
sekundach uruchomiony zostaje siłownik spychający skrzynkę
na transporter. Po sekundzie od momentu zadziałania siłownika włączony zostaje silnik M3. M3, wyłączony będzie po 30 sekundach lub do momentu zadziałania czujnika CZ3. Naciśnięcie
przycisku START w sytuacji gdy skrzynka znajduje się na wadze,
powoduje uruchomienie siłownika wypychającego skrzynkę na
transporter, a następnie uruchomienie silnika M3 na czas 30 sekund lub do zadziałania czujnika CZ3. Przy każdym transporterze
umieszczone są przyciski awaryjnego stopu odcinające zasilanie
całego obiektu.
Funkcje wyprowadzeń:
I1 – (START) włączenie procesu załadunku,
I2 – czujnik umieszczony na wadze,
I3 – sygnał alarmu wagi,
I4 – czujnik umieszczony na końcu transportera
odbierającego załadowane skrzynki,
I5 – (STOP) wyłączenie procesu załadunku.
Q1 – silnik M1,
Q2 – silnik M2,
Q3 – silnik M3,
Q4 – siłownik spychający skrzynkę z wagi na
transporter,
Q5 – alarm dźwiękowy.
Korzyści wynikające z zastosowania LOGO!
Sterownik LOGO! został zastosowany do typowej maszyny przemysłowej do załadunku skrzynek. Umożliwia to szybkie przeprogramowanie maszyny w zależności od potrzeb oraz wyposażenie
instalacji we wszelkiego rodzaju zabezpieczenia (awaryjne stopy
i czujniki).
Autor:
Marcin Wyrwa (1)
28
Przykład 12
Zastosowanie LOGO!
Sterowanie maszyna do załadunku skrzynek
Autor:
Marcin Wyrwa (1)
29
Przykład 13
Zastosowanie LOGO!
Sterowanie układem transportowym
Koncepcja wykorzystania LOGO!
Układ transportowy składa się z trzech przenośników taśmowych. Do ich sterowania w trybie automatycznym i ręcznym zastosowano sterownik LOGO!
Opis:
W trybie ręcznym jedno naciśniecie przycisku START powoduje
uruchomienie jednego przenośnika. Kolejny uruchamia się po ponownym naciśnięciu przycisku. Przycisk STOP wyłącza wszystkie
pracujące w danej chwili przenośniki. W trybie automatycznym
naciśniecie przycisku START powoduje wyzwolenie sekwencji
załączania przenośników. Kolejny przenośnik uruchamia się po
upływie 3 sekund od uruchomienia poprzedniego. Start pierwszego z nich poprzedzony jest jedną sekundą alarmu dźwiękowego. Naciśnięcie przycisku STOP powoduje również sekwencyjne
wyłączanie przenośników w takim samym odstępie czasowym
jak przy starcie. Wciśnięcie przycisku awaryjnego powoduje natychmiastowe zatrzymanie transporterów i wyzwolenie sygnału
dźwiękowego przerywanego z częstotliwością 1Hz. Sekwencyjne załączanie poszczególnych silników realizowano za pomocą
liczników liczących w górę lub w dół. W trybie automatycznym
taktowanie liczników realizowane jest za pomocą generatora
astabilnego. W trybie ręcznym, liczniki zwiększają lub zmniejszają wartość po każdorazowym naciśnięciu przycisku START.
Funkcje wyprowadzeń:
I1 – start
I2 – stop
I3 – zatrzymanie awaryjne
I4 – wybór trybu pracy
Q1 – silnik 1
Q2 – silnik 2
Q3 – silnik 3
Q4 – alarm dźwiękowy
Korzyści wynikające z zastosowania LOGO!
Dzięki sterownikowi LOGO! wykorzystano możliwości sekwencyjnego sterownia procesem za pomocą liczników. LOGO! umożliwia również łatwe modyfikacje systemu w zależności od aktualnych potrzeb.
Autor:
Marcin Wyrwa (2)
30
Przykład 13
Zastosowanie LOGO!
Sterowanie układem transportowym
Autor:
Marcin Wyrwa (2)
31
Przykład 14
Zastosowanie LOGO!
Sterowanie układem wentylacyjnym dla budownictwa mieszkaniowego
Koncepcja wykorzystania LOGO!
Sterownik LOGO! jest z powodzeniem wykorzystywany w automatyce budynków. Tym razem został użyty do sterowania wentylatorami w przypadku pożaru.
Opis:
Przedstawiony układ wykorzystuje tzw. Układ Dahlandera dla
dwóch prędkości obrotowych: wolnych i szybkich. Układ wykorzystuje silniki jednofazowe, które są załączane poprzez styczniki. Załączenie układu jest zależne od trybu pracy układu (łącznik
S4 – wejście I4): ręcznego (S4 załączony) lub automatycznego
(S4 wyłączony). W trybie ręcznym załączenie może nastąpić poprzez naciśnięcie przycisku normalnie rozwartego S1 (wejście I1)
– obroty wolne, lub naciśnięcie przycisku S2 (wejście I2), które
odpowiadają obrotom szybkim. W trybie automatycznym załączenie następuje poprzez sygnał z czujników dymu 1 i 2 (odpowiednio wejścia I5 i I6), umieszczonych w budynku. W przypadku
pożaru sygnał z układu pożarowego może wysterować załączenie układu dla stanu pracy obroty szybkie (odpowiada wejściu I9
– normalnie otwarty). Wyłączenie układu może nastąpić poprzez
naciśnięcie przycisku normalnie zwartego S3 (wejście I3), lub w
wyniku awarii, ze strony przeciążenia termicznego lub prądowego obwodu zasilania silnika. Informuje o tym sygnał ze styku pomocniczego normalnie zwartego przy bezpieczniku z obwodem
zabezpieczenia termicznego lub nadprądowego, którego stan
odpowiada wejściu I7 oraz I8. Układ sterowania zabezpiecza
przed skutkami jednoczesnego przyciśnięcia dwóch przycisków
rozruchowych S1 i S2, jak również przed pracą układu podczas
jednoczesnego przekazania sygnałów sterowania dla obu stanów pracy układu.
Funkcje wyprowadzeń:
I1 – Załącznik obrotów wolnych
I2 – Załącznik obrotów szybkich
I3 – Wyłącznik główny
I4 – Przełącznik wyboru trybu pracy
I5 – Czujnik dymu 1
I6 – Czujnik dymu 2
I7 – Sygnał awarii 1
I8 – Sygnał awarii 2
I9 – Sygnał pożarowy KP
Q1 – Sygnał załączenia wolnych obrotów
Q2 – Sygnał załączenia szybkich obrotów
Q3 – Sygnał załączenia szybkich obrotów
Korzyści wynikające z zastosowania LOGO!
„Bezpieczeństwo przede wszystkim” – to właśnie zgodnie z tym
hasłem zastosowano sterownik LOGO! w tej aplikacji. Reakcją na
wykrycie pożaru jest wentylowanie zagrożonego pomieszczenia, co umożliwi łatwiejszą ewakuację osób znajdujących się w
pobliżu pożaru.
Autor:
Marek Rzerzut
32
Przykład 14
Zastosowanie LOGO!
Sterowanie układem wentylacyjnym dla budownictwa mieszkaniowego
Autor:
Marek Rzerzut
33
Przykład 15
Zastosowanie LOGO!
Samoczynne Ponowne Załączenie (SPZ) na linii 110kV
Koncepcja wykorzystania LOGO!
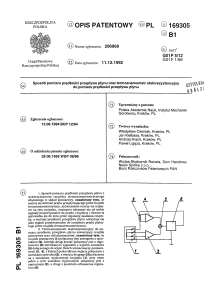
Prezentowane urządzenie powstało przy wymianie zabezpieczeń na liniach 110 kV. Zamiast specjalnych przekaźników realizujących automatykę SPZ (Samoczynne Ponowne Załączenie),
zastosowano sterownik LOGO!
Opis:
Impuls wyłączający z zabezpieczeń, który powoduje otwarcie
wyłącznika w polu, poprzez wejście I1 rozpoczyna odmierzanie
czasu przerwy beznapięciowej (w tym przypadku 0,7s), po tym
czasie generowany jest impuls załączenia wyłącznika o czasie
trwania 0,5s (B03). Startuje również czas blokady po cyklu – 5s
generowany przez B05 oraz czas, po którym sprawdzony będzie
stan położenia wyłącznika (B14). Wszystkie impulsy wyłączające
pojawiające w czasie trwania blokady po cyklu powodują definitywne wyłączenie pola. Ze schematu logicznego LOGO! wynika, że pobudzenie SPZ uzależnione jest od stanu wejścia I2. Na
wejście to podawany jest stan wysoki świadczący o gotowości
wyłącznika do cyklu SPZ. Dodatkowo pobudzenie SPZ uzależnione jest od czasu blokady po cyklu oraz czasu blokady po załączeniu operacyjnym wyłącznika, miejscowo lub zdalnie przez
telemechanikę. Realizuje to wejście I3, na którym stan wysoki
powoduje rozpoczęcie odmierzania czasu blokady po załączeniu
operacyjnym (wspólny z czasem blokady po cyklu). Zawsze chcemy aby po załączeniu operacyjnym pola blokować automatykę
SPZ na określony czas (tutaj 5s). Wszystkie impulsy wyłączające
pojawiające się w czasie blokady po załączeniu operacyjnym powodują definitywne wyłączenie pola. Na wejścia I4, I5 podawany jest stan położenia wyłącznika. Pod koniec blokady po cyklu
SPZ sprawdzany jest stan położenia wyłącznika i generowane są
odpowiednie impulsy do liczników zliczających cykle SPZ udane
(WZ wyłącznik załączony) i nieudane (WZW- wyłącznik wyłączony). Stany liczników prezentowane są na wyświetlaczu LOGO!,
pamiętane są również po wyłączeniu napięcia zasilania. Stan
liczników jest w wielu przypadkach jedynym dowodem działania
automatyki SPZ na linii. Podanie napięcia na I6 i I7 kasuje liczniki.
Impuls załączający wyłącznik wyprowadzony jest na wyjście Q1,
natomiast blokada po cyklu i po załączeniu operacyjnym na wyjście Q2. Aby nie uszkodzić sterownika zastosowano przekaźniki
pośredniczące do załączania wyłącznika przez LOGO! Przekaźniki
przystosowane do łączenia prądów przemiennych nie zawsze radzą sobie z prądami stałymi o wartości przekraczających nieraz
1A.
Funkcje wyprowadzeń:
I1 – pobudzenie
I2 – stan napędu
I3 – załączenie operacyjne
I4 – stan załączony
I5 – stan wyłączony
I6 – kasowanie liczników
I7 – kasowanie liczników
Q1 – załączenie
Q2 – blokada
Korzyści wynikające z zastosowania LOGO!
Wykorzystanie sterownika LOGO! było tańszym rozwiązaniem
niż zastosowanie urządzenia dedykowanego do SPZ. Przy doborze sterownika PLC okazało się, że LOGO! jako jedyny miał możliwość zasilania prądem stałym 220 V.
Autor:
Michał Cuprych
34
Przykład 15
Zastosowanie LOGO!
Samoczynne Ponowne Załączenie (SPZ) na linii 110kV
Autor:
Michał Cuprych
35
Przykład 16
Zastosowanie LOGO!
Automatyczny garaż
Koncepcja wykorzystania LOGO!
Sterownik został wykorzystany do sterowania drzwiami garażu
oraz wentylatorem do oczyszczenia powietrza w garażu ze spalin.
Opis:
Impuls na jednym z wejść B012 wyzwala timer B002 na okres
15s. Jest to czas dłuższy, niż konieczny do otwarcia lub zamknięcia drzwi garażowych z przeciwnego skrajnego położenia. Dzieje
się tak dlatego, że wyłączenie silnika następuje poprzez rozwarcie obwodu przycisku krańcowego I2 lub I3. Oprócz generowania
impulsu długości 15s. zmienia się także wyjście B011 na przeciwne. Dzięki temu można sterować pracą silnika do góry (B001) lub
do dołu (B002). Ważną rzeczą jest ustawienie B011 w taki sposób,
aby pamiętał on swój stan po chwilowym braku zasilania. Pozwoli to uniknąć niespodzianek w postaci nieprawidłowego kierunku ruchu drzwi gdy zasilanie powróci. B001 i B002 powodują
zadziałanie silnika gdy zostaną spełnione określone warunki. Dla
B001 timer musi generować impuls, oprócz tego wyjście B011
musi być w stanie wysokim, ponadto krańcówka górna nie może
być wciśnięta, a sygnał z awaryjnego zatrzymania musi być w
stanie niskim. Analogicznie jest z bramką B002, lecz udział bierze
tu krańcówka dolna (I3), a wejście sygnału z B011 jest negowane.
Wentylator uruchamiany jest z chwilą, kiedy drzwi zaczynają się
opuszczać lub gdy poziom spalin przekroczy założoną wartość
(AI1 i B007). Czas działania wentylatora ustawiony jest na 2 minuty, lub do powrotu poziomu spalin do normy. Bramka B006 dostarczająca impuls czasowy ustawiona jest, aby pamiętała swoją
wartość po przerwie zasilania. Przyjęto założenie, że opuszczanie
drzwi garażowych świadczy o wjeździe lub wyjeździe auta. Aby
układ był bardziej „inteligentny” należy zmienić blok B008 (OR)
na AND – wtedy podłącza się czujnik spalin do wejścia analogowego lub cyfrowego. Bloki podłączone do I4 uruchamiają zamykanie drzwi, w chwili gdy auto minie barierę optyczną. Aby to
mogło się stać, muszą być spełnione dwa warunki – krańcówka
górna (I2) musi zostać wyzwolona oraz auto musi minąć czujnik.
Nie wystarczy, że wjedzie w jego zasięg – musi opuścić pole jego
działania. Dzieje się tak dlatego, iż blok B004 reaguje na zbocze
sygnału.Gdy auto przejedzie wysyłany jest impuls, tak jak byśmy
nacisnęli włącznik I6 lub przycisk pilota I1. Dodatkowo, gdy drzwi
są opuszczane, i jakiś obiekt wejdzie w zasięg działania bariery
optycznej, układ zmieni kierunek działania silnika – drzwi zaczną
się podnosić. Aby ta sytuacja mogła mieć miejsce musi być uruchomiony posuw drzwi do dołu oraz musi być przerwany obwód
bariery optycznej.
Wyjście Q4 można wykorzystać jako zasilanie bariery optycznej.
Uruchamiane jest ono z chwilą rozpoczęcia podnoszenia drzwi
garażowych, a wyłączane gdy zadziała krańcówka dolna I3. Układ
uzupełniony jest o awaryjny wyłącznik, który jednocześnie pełni
rolę wyłącznika napięcia od silnika, dzięki czemu można podnosić i opuszczać bramę ręcznie w każdym momencie.
Funkcje wyprowadzeń:
I1 – sygnał otwarcia drzwi z pilota
I2 – krańcówka górna
I3 – krańcówka dolna
I4 – czujnik bezpieczeństwa przy drzwiach
I5 – wejście czujnika spalin
I6 – włącznik wewnętrzny drzwi garażu
I7 – awaryjny stop
I8 – przycisk resetu systemu
AI1 – czujnik spalin
Q1 – silnik podnosi drzwi
Q2 – silnik opuszcza drzwi
Q3 – wentylator
Q4 – bariera optyczna
Korzyści wynikające z zastosowania LOGO!
Dzięki sterownikowi LOGO! zautomatyzowano pomieszczenie
garażowe. Koszty jakie powstałyby przy tworzeniu podobnego
systemu przez profesjonalną firmę byłyby dużo wyższe. Dodatkowo system oparty na sterowniku LOGO! można zawsze rozbudować o dodatkowe komponenty, bez konieczności przebudowy
systemu, a jedynie modyfikując program sterownika.
Autor:
Remigiusz Kozak
36
Przykład 16
Zastosowanie LOGO!
Automatyczny garaż
Autor:
Remigiusz Kozak
37
Przykład 17
Zastosowanie LOGO!
Automatyzacja szklarni
Koncepcja wykorzystania LOGO!
Sterownik przemysłowy LOGO! został „zaprzęgnięty” do pracy w
szklarni. Założeniem było utrzymanie właściwych parametrów
wewnątrz szklarni, zautomatyzowanie prac niebezpiecznych dla
człowieka – oprysków, a przy tym wszystkim obniżenie kosztów.
Autor uwzględnił w programie również liczne funkcje bezpieczeństwa takie jak blokada jednoczesnego otwierania i zamykania okien lub ograniczenie czasowe zasłaniania żaluzji. Wykorzystano również wyświetlacz wbudowany w LOGO! do sygnalizacji
błędów i informacji o parametrach nastawionych.
Opis:
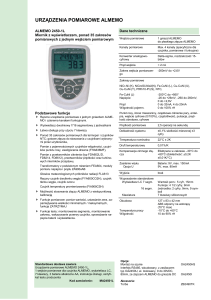
Układ regulacji temperatury opiera się na trzech czujnikach
temperatury wewnątrz szklarni rozmieszczonych liniowo, czujnika temperatury zewnętrznej i regulowanego źródła napięcia
pełniącego rolę odniesienia zadanej temperatury wewnętrznej.
Temperatura zadana może być ustawiana za pomocą zwykłego
potencjometru przy założeniu, że dla 0V temp. zadana wynosi
0OC, dla 10V 100 OC. Wykorzystywane czujniki temperatury
mierzą temperaturę od -40 do 60 OC podając proporcjonalne
napięcie z zakresu 0-10V. Wymaga to odpowiednich korekt w
ustawieniach komparatorów. Komparatory SF011, SF012, SF013
i SF014 porównują wskazania czujników temperatury wewnętrznej i w przypadku rozbieżności większej niż 5OC załączają wiatraki, które wyrównują temperaturę. Wyjścia Q3 i Q4 sterują wiatrakiem pomiędzy czujnikami temperatury 1 i 2 i załączają go w
odpowiednią stronę. W ten sam sposób wyjścia Q3 i Q4 sterują
drugim wiatrakiem pomiędzy czujnikami 2 i 3. Żeby uniknąć niepotrzebnego wychłodzenia wiatraki nie pracują, gdy są otwarte drzwi (I1) lub okna. Komparatory SF006, SF008 i SF009 porównują temp. wewnętrzną z każdego czujnika z temp. zadaną,
komparator SF010 porównuje temp. zewnętrzną z temp. zadaną.
Dodatkowa temp. regulowana jest przez otwieranie i zamykanie
okien – otwierają się jeżeli na zewnątrz jest powyżej 25OC, gdy
wewnątrz jest cieplej niż temperatura zadana lub po ręcznym
wyzwoleniu otwierania (I5). Zamykanie okien (Q8) działa analogicznie jak otwieranie. Dodatkowo jest ono wymuszone w czasie
pryskania środkami ochrony roślin.
Załączone ogrzewanie oznacza otwarcie zaworu (Q9) blokującego dopływ ciepłej wody grzejnej z pieca do instalacji grzewczej.
Domyślnie jest on otwarty przy zamkniętych drzwiach i oknach
oraz gdy temperatura na wszystkich czujnikach jest niższa od zadanej, co przekazują wyjścia komparatorów SF006 i SF008 do
SF010. W innych przypadkach, gdy temperatura wewnątrz jest
nierówna, jest wyrównywana wiatrakami, a gdy na zewnątrz jest
cieplej otwierane są okna. Podając stan wysoki na wejście I6 załączamy ogrzewanie na stałe wyłączając przy tym automatyczne
sterowanie.
Żaluzje są zasuwane, gdy na zewnątrz jest temperatura wyższa
niż 30 OC lub ręcznie (I9). Istnieje możliwość ręcznego sterowania pracą żaluzji (I11) i tym samym częściowe zasłonięcie żaluzji
(tylko tryb ręczny). Stan wysoki na fladze M13 informuje nas o
próbie jednoczesnego zasłaniania i odsłaniania żaluzji i powoduje on wyłączenie obu tych czynności.
Proces opryskiwania roślin podzielono na następujące
etapy:
1.
powrót lancy do położenia początkowego,
2.
napełnienie zbiornika wodą do określonego
poziomu i ręcznym dolaniu środka chemicznego,
3.
wymieszanie cieczy użytkowej,
4.
wypryskanie w czasie jednego przebiegu,
5.
powrót do położenia początkowego.
Lanca porusza się do tyłu w stanie 1 i 5 do osiągnięcia stanu początkowego (I14). Napęd lancy jest zintegrowany z enkoderem inkrementalnym, który wysyła impulsy na wejście I16 sterownika.
Pojawianie się tych impulsów powoduje załączanie T032 i T035
które z kolei odwlekają wyłączenie T031 co jest równoznaczne z
wyłączeniem napędu. Stan wysoki na Q10 wysuwa lancę, opryskiwanie jest równoznaczne z otwarciem zaworu (Q15). Aby oba
te wyjścia były załączone, maszyna musi być w stanie 4, lanca
nie może być na końcu (I15) i nie może być zablokowana (T031).
Ostatni warunek związany z przerzutnikiem SF037 sprawdza czy
są zamknięte okna, czy jest odpowiednie ciśnienie i napęd nie
jest zablokowany. W stanie 2 maszyny zbiornik jest napełniony
za pomocą zaworu (Q12) do ustalonego poziomu (I17). W stanie
3 następuje hydro-dynamiczne mieszanie cieczy polegające na
przelewaniu jej w zbiorniku za pomocą pompy (Q13) i zaworu
mieszania (Q14). Za przejście automatu do następnego stanu
odpowiada T036 wyzwalany sygnałami końca poszczególnych
etapów.
Ostatnią czynnością wykonywaną przez sterownik jest podlewanie. Może ono odbywać się ręcznie lub automatycznie: czasowo
lub w zależności od wilgotności podłoża. Czujnik wilgotności
(AI6) podaje napięcie proporcjonalne w zakresie 0-10V dla wilgotności 0-100%. Podlewanie w trybie ręcznym następuje przy
stanie wysokim na wejściu I20. Możliwe jest wyzwolenie półgodzinnego podlewania poprzez impuls dodatni na wejściu I21.
Dodatkowo zostały zaimplementowane 2 tryby automatyczne.
W trybie czasowym podlewanie następuje w czasie zdefiniowanym w T045 - tutaj: codziennie w godzinach 22-22:30. W trybie
pomiaru wilgoci włączanym w I23 podlewanie załącza się na pół
godziny, gdy tylko wilgotność podłoża spadnie poniżej zadanej
(40%). W każdej chwili możliwe jest przerwanie podlewania poprzez wejście I24.
Autor:
Tomasz Kiesielewski
38
Przykład 17
Zastosowanie LOGO!
Automatyzacja szklarni
Funkcje wyprowadzeń:
I1 – czujnik otwartych drzwi
I2 – czujnik nie zamknięcia okien
I3 – czujnik nie otwarcia okien
I4 – ręczne zamykanie okien
I5 – ręczne otwieranie okien
I6 – stałe ogrzewanie szklarni
I7 – czujnik zasłonięcie żaluzji
I8 – czujnik odsłonięcia żaluzji
I9 –ręczne zasłanianie żaluzji
I10 – sygnał odsłaniania żaluzji
I11 – tryb ręczny zasłaniania żaluzji
I13 – włączenie pryskania
I14 – lanca do opryskiwania w położeniu początkowym
I19 – czujnik ciśnienia płynu w lancy do oprysków
I20 – podlewanie w trybie ręcznym
I21 – załączenie podlewania przez pół godziny
I23 – załączenie pomiaru stanu wilgoci podłoża
I24 – przerwanie podlewania
Korzyści wynikające z zastosowania LOGO!
Dzięki takiemu rozwiązaniu za pomocą sterownika LOGO! ograniczono ingerencję człowieka do kontrolowania prawidłowości
przebiegu poszczególnych procesów. Zautomatyzowane podlewanie i kontrolowanie temperatury w szklarni pozwala na
zmniejszenie kosztów, a automatyzacja podawania środków
chemicznych zwiększa bezpieczeństwo człowieka oraz dzięki
równomiernym opryskom również obniża koszty procesu. Jest to
bardzo dobry przykład wykorzystania automatyki przemysłowej
w szklarni.
AI1-AI3 – czujniki temperatury wewnątrz szklarni
AI4 – czujnik temperatury na zewnątrz szklarni
AI5 – temperatura zadana
AI6 – czujnik wilgotności podłoża
AI7 – wilgotność zadana podłoża
Q1 – zasłanianie żaluzji
Q2 – odsłanianie żaluzji
Q3–Q6 – sterowanie wentylatorami
Q7 – otwarcie okien
Q8 – zamknięcie okien
Q9 – otwarcie zaworu instalacji grzewczej
Q10 – wysunięcie lancy do oprysków
Q12 – napełnianie zbiornika do oprysków
Q13 – pompa napełniająca zbiornik do oprysków
Q14 – mieszanie zbiornika do oprysków
Q15 – włączenie pryskania
Q16 – podlewanie
Autor:
Tomasz Kiesielewski
39
Przykład 17
Zastosowanie LOGO!
Automatyzacja szklarni
Autor:
Tomasz Kiesielewski
40
Przykład 17
Zastosowanie LOGO!
Automatyzacja szklarni
Autor:
Tomasz Kiesielewski
41
Przykład 18
Zastosowanie LOGO!
Automatyzacja wyposażenia samochodu
Koncepcja wykorzystania LOGO!
LOGO! zostało wykorzystywane jako alternatywa dla posiadaczy
samochodów bez automatycznej klimatyzacji. Po kilku modyfikacjach komfort jazdy dorównał poziomem tym z drogich modeli
samochodów.
Opis:
Pierwszą decyzją, która podejmuje system (B003, B005) po włożeniu kluczyka do stacyjki (I1) na podstawie wartości SP (AI1)
oraz temperatury zewnętrznej (AI2) jest jaki system uruchomić
– ogrzewanie czy klimatyzację. W przypadku, gdy temp. zewnętrzna jest porównywalna do SP, aby nie było ciągłego przełączania między systemami wprowadzono histerezę trwającą 10s.
Aby system mógł realizować ogrzewanie musi być spełniony warunek dotyczący temperatury silnika > 70OC (AI3). Następnie w
zależności od różnicy pomiędzy temperaturą zadaną (AI1) i temperaturą bieżącą w samochodzie (AI4) wybierany jest program
ogrzewania. Gdy różnica jest większa niż 10OC, siłownik sterujący wysterowany jest na wartość 1000 (B011) – maksymalne
otwarcie dopływu ciepłego powietrza, a siła nawiewu ustawiana
jest na wartość III (Q7) o czym informuje dioda LED (Q1). Gdy
różnica temp. jest w granicach 5÷10OC (B012), wysterowanie
siłownika nie zmienia się, a siła nawiewu maleje do wartości II
(Q8; dioda Q2). W przypadku gdy temperatury różnią się o mniej
niż 5OC, siła nawiewu maleje do I, a sterowanie siłownika przejmuje regulator PI. Wyjście z układu ogrzewania wybierane jest
w multiplekserze (B033). Sterowanie klimatyzacją zrealizowane
jest podobnie do sterowania ogrzewaniem, bez sprawdzania
temp. silnika. Gdy temp. wewnątrz samochodu (AI4) jest większa
niż 10OC (B018) od temperatury zadanej (AI1) nawiew włącza
się z siła III (dioda Q4) a siłownik wysterowany jest na wartość
0 (zamknięty dopływ ciepłego powietrza). odpowiednie układy
logiczne. Wysterowanie w przypadku, gdy różnica temperatur
zmaleje i znajdzie się w przedziale 5÷10OC (B026, B027, B028)
siła nawiewu maleje do II (dioda LED Q5), a wysterowanie siłownika się nie zmienia. Gdy różnica temperatur jest mniejsza niż
5OC, sterowanie siłownikiem przejmuje regulator PI (B032), a
siła nawiewu ustawiona jest na I (dioda Q6). Wysterowanie siłownika wybierane jest w multiplekserze (B035). Ponieważ oba
systemy sterują tymi samymi elementami wykonawczymi należało zrealizować siłownika (AQ01) realizowane jest poprzez multiplekser (B037), a wyjścia binarne (Q7, Q8, Q9) do sterowania
siła nawiewu wybierane są przy użyciu funkcji OR (B038, B039,
B040). Informację o grzaniu/chłodzeniu podaje dioda Q13, a informacje o temp. wewnętrznej, temp. zewnętrznej, temp. zadanej oraz wysterowaniu siłownika znajdują się na wyświetlaczu
sterownika (B058).
Samochód został rwnież wyposażony w dodatkowe funkcje:
Światła mijania - gdy w stacyjce znajduje się kluczyk (I1) a data
w kalendarzu (B044, B045) wskazuje, że jest okres w którym
trzeba jeździć z włączonymi światłami cały dzień, system z opóźnieniem 5s. (B049) włączy reflektory. Sprawdzane jest również
natężenie światła (AI5, granica ustawiana w bloku B051), na
podstawie którego niezależnie od pory roku (B048) odbywa się
sterowanie światłami mijania (Q11). Światła te mają opóźnienie
wyłączenia ustawione na 30s. (B049) co umożliwia kierowcy dojście do domu.
Oświetlenie wewnętrzne - system na podstawie czujnika natężenia światła (AI5) i bloku B051 decyduje, czy jest dostatecznie
ciemno, aby w przypadku otwarcia drzwi (I6) zapalić oświetlenie
wewnętrzne (Q12) i zgasić je po zamknięciu drzwi z opóźnieniem
15s (B054).
Pasy bezpieczeństwa - system za pomocą czujników obecności
kierowcy (I2) i pasażera (I4) oraz czujników zapięcia pasów (odpowiednio I3 i I5) sprawdza, czy odpowiednie osoby są właściwie
przygotowane do jazdy. Gdy system stwierdzi obecność kierowcy lub pasażera, a pasy nie będą zapięte – wygeneruje sygnał
dźwiękowy (Q10).
Autor:
Wojciech Kucharski
42
Przykład 18
Zastosowanie LOGO!
Automatyzacja wyposażenia samochodu
Funkcje wyprowadzeń:
I1 – czujnik kluczyka w stacyjce
I2 – czujnik obecności kierowcy
I3 – czujnik zapięcia pasów kierowcy
I4 – czujnik obecności pasażera
I5 – czujnik zapięcia pasów pasażera
I6 – czujnik otwarcia drzwi
Korzyści wynikające z zastosowania LOGO!
Dzięki sterownikowi LOGO! samochód wyposażony został w
funkcje normalnie dostępne tylko w drogich modelach pojazdów. Funkcje te znacznie zwiększyły komfort jazdy oraz – a może
przede wszystkim – zwiększyły poziom bezpieczeństwa kierowcy i pasażerów.
Q1 – dioda LED sygnalizująca moc ogrzewania III
Q2 – dioda LED sygnalizująca moc ogrzewania II
AI1 –temperatura zadana
AI2 – temperatura na zewnątrz pojazdu
Q3 – dioda LED sygnalizująca moc ogrzewania I
Q4 – dioda LED sygnalizująca siłę nawiewu III
Q5 – dioda LED sygnalizująca siłę nawiewu II
Q6 – dioda LED sygnalizująca siłę nawiewu I
Q7 – siła nawiewu III
Q8 – siła nawiewu II
Q9 – siła nawiewu I
Q10 – sygnał dźwiękowy nie zapiętych pasów
Q11 – włączenie świateł
Q12 – włączenie oświetlenia wewnętrznego
Q13 – włączenie klimatyzacji
AI3 – temperatura silnika
AI4 – temperatura wewnątrz pojazdu
AI5 – natężenie światła
AQ1 – siłownik sterujący klimatyzacją
Autor:
Wojciech Kucharski
43
Przykład 18
Zastosowanie LOGO!
Automatyzacja wyposażenia samochodu
Autor:
Wojciech Kucharski
44
Przykład 18
Zastosowanie LOGO!
Automatyzacja wyposażenia samochodu
Autor:
Wojciech Kucharski
45
Przykład 19
Zastosowanie LOGO!
Sterowanie ramieniem robota za pomocą LOGO!
Koncepcja wykorzystania LOGO!
Opisany układ umożliwia sterowanie ruchem ramienia robota w
zadanym przez użytkownika zakresie. Odczyt pozycji ramienia
wykonano na enkoderze inkrementalnym. Zakres ruchu można
zmieniać z klawiatury LOGO również i w trakcie pracy robota. Roboty przeważnie składają się z wielu ramion. Łącząc trzy ramiona
o regulowanym zakresie ruchu pracujące w osiach X, Y i Z można
już przemieszczać narzędzie robota w trójwymiarowej przestrzeni. Artykuł pokazuje jak zastosować LOGO do sterowania pionowym ramieniem robota.
Opis:
Silnik M napędza pas, do którego przymocowane jest wykonujące pionowy ruch ramię. Załączenie obrotów prawych silnika
powoduje ruch ramienia w dół, obroty lewe oznaczają ruch w
górę. Cechą charakterystyczną enkoderów inkrementalnych jest
to, że nie pamiętają aktualnej pozycji, po załączeniu sterowania
konieczne jest bazowanie układu odczytu pozycji. Po naciśnięciu
przycisku Start ramię robota wykonuje ruch w dół. Po dojściu do
czujnika pozycji bazowej B1 zerowany jest układ odczytu pozycji i
załączane są lewe obroty silnika. Następnie ramię wykonuje ruch
pomiędzy dwiema skrajnymi pozycjami h1 i h2, które to można
zadawać z klawiatury LOGO. Centralnym elementem układu sterowania jest kontroler LOGO! 12/24 RC. Do wejścia I1 sterownika
podłączony jest przycisk załączania sterowania S1, natomiast do
I2 przycisk stopowy S2. Czujnik indukcyjny pozycji bazowej B1
podaje sygnał na wejście I3. W opisanym przykładzie zastosowano czujnik indukcyjny PNP NO typu Bi5U-M18-AP6X firmy Turck.
Wyjście enkodera podłączone jest do wejścia szybkiego zliczania I5 sterownika LOGO. W przypadku wejść standardowych, po
zmianie stanu sygnału na wejściu, sygnał musi pozostawać na
stałym poziomie przynajmniej przez okres jednego cyklu programu. Tylko wtedy LOGO wykryje jego zmianę. W przypadku wejść
szybkiego zliczania I5 i I6 nie ma tego ograniczenia. Do odczytu
pozycji ramienia wykorzystano miniaturowy enkoder inkrementalny E6A2-CS5C firmy Omron. Posiada on jedno wyjście typu
otwarty kolektor, konieczne było więc zastosowanie rezystora
R1, który ustala prąd obciążenia wyjścia enkodera na poziomie
10mA. Do wyjść Q1 i Q2 sterownika podłączone są styczniki K1 i
K2. K1 załącza obroty silnika M w prawo, natomiast K2 w lewo.
Wyłącznik S3 służy do awaryjnego wyłączenia układu. Procedura
bazowania wykonywana jest w pierwszej kolejności po każdym
załączeniu sterowania robotem.
Odczyt położenia za pomocą enkodera uruchamiany jest dopiero
po zakończeniu bazowania. Podstawowym elementem bloku obliczania aktualnej pozycji jest licznik góra/dół. Licznik ten posiada cztery wejścia: R- reset, Cnt – wejście impulsowe, do którego
należy podłączać wejścia szybkiego zliczania I5 i I6, Dir – kierunek zliczania oraz Par. Dla wejścia Par definiuje się dwie wartości
progowe: On – przy której wyjście licznika jest wzbudzane i Off
– zerującą wyjście Wykorzystano możliwość ustawienia różnych
wartości progów On i Off dostępną od wersji OBA4 sterownika
LOGO. W programie sterującym robotem kierunek zliczania jest
zmieniany po osiągnięciu wartości progowych a więc konieczne
było zastosowanie przeniesienia, za pośrednictwem flagi M, sygnału z wyjścia licznika góra/dół na jego wejście Dir. Dodatkowo
wprowadzone zostało na timerach On-delay opóźnienie pomiędzy przełączeniami stanu wyjść Q1 i Q2, tak żeby zmiana kierunku ruchu ramienia nie następowała natychmiastowo. Po dojściu
do wartości progowej zdejmowany jest sygnał z wyjścia sterownika, ramię jest zatrzymywane i dopiero po upływie zadanego na
timerze czasu uruchamiane są obroty przeciwne silnika.
Funkcje wyprowadzeń:
I1 – Start
I2 – Stop
I3 – Pozycja bazowa
I5 – Wejście enkodera inkrementalnego
Q1 – Wyjście obrót w prawo
Q2 – Wyjście obrót w lewo
Korzyści wynikające z zastosowania LOGO!
Wykonanie aplikacji na LOGO! pozwala na niezwykle tanie realizacje pozycjonowania osi , co było dotychczas możliwe tylko
na poziomie sterowników PLC i wymagało wydajnych zasobów
sprzętowych sterownika.
Autor:
Wojciech Nowakowski
46
Przykład 19
Zastosowanie LOGO!
Sterowanie ramieniem robota za pomocą LOGO!
Autor:
Wojciech Nowakowski
47
Przykład 19
Zastosowanie LOGO!
Sterowanie ramieniem robota za pomocą LOGO!
Autor:
Wojciech Nowakowski
48
NOTATKI
Zastosowanie LOGO!
www.siemens.pl/simatic
LOGO! – pewny i wydajny
LOGO! w Internecie
• dodatkowe informacje o produkcie
• bezpłatne oprogramowanie demo
• upgrade oprogramowania
• gotowe przykłady aplikacji
• informacje o nowościach
• opisy zastosowań u klientów
• i wiele innych
Dane katalogowe
LOGO! typy
Numer katalogowy
LOGO! 24
6ED1 052-1CC00-0BA5
LOGO! 24o
6ED1 052-2CC00-0BA5
LOGO! 12/24RC
6ED1 052-1MD00-0BA5
LOGO! 12/24Rco
6ED1 052-2MD00-0BA5
LOGO! 24RC (AC/DC)
6ED1 052-1HB00-0BA5
LOGO! 24RCo (AC/DC)
6ED1 052-2HB00-0BA5
LOGO! 230RC
6ED1 052-1FB00-0BA5
LOGO! 230Rco
6ED1 052-2FB00-0BA5
Każdy kto zakupi LOGO!, oprogramowanie
lub zestawy startowe ma prawo do
bezpłatnego wsparcia technicznego.
Moduły rozszerzeń
Numer katalogowy
Zastosowania
LOGO! DM8 24
6ED1 055-1CB00-0BA0
LOGO! DM8 12/24R
6ED1 055-1MB00-0BA1
LOGO! DM8 24R (AC/DC)
6ED1 055-1HB00-0BA0
LOGO! DM8 230R
6ED1 055-1FB00-0BA1
LOGO! DM 16 24
6ED1 055-1CB10-0BA0
Gotowe rozwiązania, uaktualnienie
oprogramowania można znaleźć na:
www.siemens.de/microset oraz
www.siemens.de/logo
LOGO! DM 16 24R
6ED1 055-1NB10-0BA0
LOGO! DM 16 230R
6ED1 055-1FB10-0BA0
LOGO! AM2
6ED1 055-1MA00-0BA0
LOGO! AM2 PT100
6ED1 055-1MD00-0BA0
LOGO! AM2 AQ
6ED1 055-1MM00-0BA0
Moduły komunikacyjne
Numer katalogowy
LOGO! AS-i
3RK1 400-0CE10-0AA2
LOGO! EIB/KNX
6BK1 700-0BA00-0AA1
LOGO! LON
6BK1 700-0BA10-0AA0
Akcesoria
Numer katalogowy
LOGO! dokumentacja niemiecka
6ED1 050-1AA00-0AE6
LOGO! dokumentacja angielska
6ED1 050-1AA00-0BE6
LOGO! moduł pamięci EEPROM
6ED1 056-5CA00-0BA0
LOGO! Soft Comfort 5.0
6ED1 058-0BA01-0YA0
LOGO! Soft Comfort Upgrade
6ED1 058-0CA01-0YE0
LOGO! PC-Kabel RSZ32
6ED1 057-1AA00-0BA0
LOGO! PC-Kabel USB
6ED1 057-1AA01-0BA0
Polska wersja językowa oprogramowania
LOGO! Soft Comfort dostępna jest
u dystrybutorów oraz pod
adresem : www.siemens.pl/simatic
R: wyjścia przekaźnikowe, C: zegar RTC, o: brak wyświetlacza
SIMATIC - przedstawiciele branży Automation and Drives w Polsce:
Siemens Sp. z o.o.
ul. Żupnicza 11
03-821 Warszawa
tel.: 022-870 90 22
fax: 022-870 98 68
Biuro Regionalne
w Gdańsku
Al. Grunwaldzka 413
80-309 Gdańsk
tel.: 058-764 60 92
fax: 058-764 60 99
www.siemens.pl/simatic
Biuro Regionalne
w Katowicach
ul. Gawronów 22
40-527 Katowice
tel.: 032-208 41 34
fax: 032-208 41 39
Biuro Regionalne
w Krakowie
ul. Kraszewskiego 36
30-110 Kraków
tel.: 012-422 77 89
fax: 012-427 26 29
e-mail: [email protected]
Biuro Regionalne
w Poznaniu
ul. Ziębicka 35
60-164 Poznań
tel.: 061-664 98 61
fax: 061-664 98 64
Biuro Regionalne
we Wrocławiu
ul. Strzegomska 46b
53-611 Wrocław
tel.: 071-777 50 60
fax: 071-777 50 50
e-mail: [email protected]