Imię i nazwisko autora pracy
Krystian Przybyła
Imię i nazwisko promotora pracy dr Marcin Binkowski
Wydział
Informatyki i Nauki o Materiałach
Kierunek studiów
Informatyka
Specjalność
Informatyczne systemy dla medycyny
Tytuł pracy
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Słowa kluczowe
Tomografia komputerowa, rekonstrukcja,
przetwarzanie obrazów
Wyrażam
zgodę
na
udostępnienie
mojej
pracy
magisterskiej
dla
celów
naukowo-dydaktycznych.
Nie wyrażam zgody na rozpowszechnianie pracy poprzez publiczne udostępnianie pracy w wersji
drukowanej i elektronicznej w taki sposób, aby każdy mógł mieć do niej dostęp w miejscu w
którym praca jest przechowywana tj. w Archiwum Uniwersytetu Śląskiego lub w Bibliotece
Uniwersytetu Śląskiego
Nie wyrażam zgody na rozpowszechnianie pracy poprzez publiczne udostępnienie pracy w wersji
elektronicznej w sieci Internet w domenie www.us.edu.pl oraz innych serwisach internetowych
tworzonych z udziałem Uniwersytetu Śląskiego
Data i podpis:
Oświadczenie autora pracy
Świadomy odpowiedzialności prawnej oświadczam, że niniejsza praca dyplomowa została
napisana przeze mnie samodzielnie i nie zawiera treści uzyskanych w sposób niezgodny z
obowiązującymi przepisami.
Oświadczam również, że przedstawiona praca nie była wcześniej przedmiotem procedur
związanych z uzyskaniem tytułu naukowego wyższej uczelni.
Oświadczam ponadto, że niniejsza wersja pracy jest identyczna z wersją elektroniczną.
..............................
..............................
Data
Podpis autora pracy
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Wstęp................................................................................................................
Cel i zakres pracy............................................................................................
Tomografia komputerowa – omówienie techniki.........................................
Część badawcza.............................................................................................
Dodatek 1 - Dokumentacja użytkowa oprogramowania...........................
Możliwości rozwoju pracy............................................................................
Wnioski i podsumowanie..............................................................................
Spis tabel........................................................................................................
Spis rysunków................................................................................................
Bibliografia.....................................................................................................
-2-
Bibliografia
Wstęp
Odkrycie promieniowania rentgenowskiego przez Wilhelma Röntgena w 1895
roku zapoczątkowało rozwój dziedziny nauki, którą dzisiaj znamy jako „obrazowanie
medyczne”. 73 lata później inżynier elektroniki Godfrey Housfield wykorzystując
podstawy matematyczne opracowane przez Johanna Radona oraz możliwości
obliczeniowe komputerów umożliwił zajrzenie w głąb ludzkiego ciała i uzyskanie jego
dowolnego przekroju. Wynaleziona w ten sposób „tomografia komputerowa” wraz z
problemem rekonstrukcji obrazu utworzyła szerokie pole do badań z zakresu fizyki
matematyki oraz informatyki. Niestety nie wszystkie rozwiązania matematyczne
odpowiadały możliwościom obliczeniowym komputerów. Część z nich zostało
zaniechanych a w ich miejsce pojawiły się rozwiązania alternatywne.
Dziś, gdy możliwości komputerów pozwalają na wykonywanie miliardów
operacji na sekundę można ponownie rozważyć rozwiązanie problemu rekonstrukcji
obrazu za pomocą metod mniej efektywnych i bardziej czasochłonnych, analizując
wyniki i przyjmując za podstawowe kryterium oceny jedynie ich jakoś a nie złożoność
obliczeniową algorytmów.
Wysoka jakość i rozdzielczość wyników rekonstrukcji jest niezbędna do
prawidłowej diagnozy wielu schorzeń a także kluczowa w przypadku dużych
powiększeń uzyskiwanych w
mikrotomografii. Tomograf komputerowy stał się
popularnym i dostępnym narzędziem, którego działanie zależne jest nie tylko od
parametrów fizycznych ale również od możliwości algorytmów odpowiedzialnych za
rekonstrukcję obrazu.
W niniejszej pracy przedstawione są podstawowe zagadnienia dotyczące
dziedziny obrazowania medycznego – tomografii rentgenowskiej. Istotę pracy stanowi
zagadnienie tomografii komputerowej w zakresie rekonstrukcji obrazu. Do pełnego
przedstawienia tematu konieczne jest jednak wykroczenie poza ramy tematyki
rekonstrukcyjnej i analiza całego procesu pozyskiwania danych jak i dalszego ich
przetwarzania i interpretacji.
-3-
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Najwięcej uwagi poświęcono problemom informatycznym i algorytmicznym,
jednakże poruszenie podstawowych tematów z zakresu fizyki czy medycyny było
konieczne dla pełnego przedstawienia tej techniki obrazowania, omówienia jej
zastosowania
oraz
dla
opisania
współczesnych
problemów,
które
pomimo
dynamicznego rozwoju informatyki i medycyny pozostają ciągle nierozwiązane.
Część pracy została zrealizowana w Univeristy of Patras w Grecji, gdzie autor
poznał podstawy obrazowania medycznego oraz zaimplementował algorytmy w
środowisku Matlab. Druga część, zrealizowana w Uniwersytecie Śląskim, polegała na
poprawie sposobu działania algorytmów oraz zaimplementowania ich w środowisku
Microsoft Visual Studio 2008 a także przyspieszeniu obliczeń poprzez analizę działania
i optymalizację algorytmu.
-4-
Bibliografia
Cel i zakres pracy
Za główny cel pracy przyjęto implementację i porównanie dwóch algorytmów
rekonstrukcyjnych: algorytmu wstecznej projekcji z filtracją - FBP oraz algorytmu
rekonstrukcji algebraicznej – ART. Implementacja i porównanie składały się z kilku
etapów pośrednich. Wymienione algorytmy zostały porównane pod względem jakości
uzyskanych wyników, szybkości działania. Implementacja przeprowadzona została w
dwóch różnych środowiskach programistycznych: MATLAB oraz Visual Studio.
Do badań wykorzystano dane z symulatora promieniowania rentgenowskiego
oraz dane uzyskane z mikrotomografu. Oprócz implementacji wyżej wymienionych
algorytmów cel pracy stanowiło uzyskanie poprawnych wyników rekonstrukcji oraz ich
analiza jakościowa. Ostatecznie otrzymane rezultaty porównane zostały z wynikami
uzyskanymi z oprogramowania komercyjnego.
Praca składa się z 5 rozdziałów, rozdział pierwszy i drugi opisują zakres
tematyczny pracy, rozdział trzeci przedstawia teoretyczne podstawy tomografii
komputerowej, rozdział czwarty opisuje zagadnienia związane z implementacją
przedstawionych algorytmów oraz zawiera analizę wyników badań. Wnioski
przedstawione zostały w rozdziale piątym. Bibliografia zawiera 21 pozycji z czego 7 to
pozycje książkowe a 12 to artykuły naukowe. Ponadto załączono spis rysunków, tabel.
Do pracy załączono dysk DVD zawierający treść pracy w wersji elektronicznej.
Źródła utworzonego oprogramowania oraz wersję skompilowaną.
Do prawidłowego działania programu wymagana jest instalacja Microsoft .NET
Framework w wersji 3.5 oraz Microsoft Charts.
-5-
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Tomografia komputerowa –
omówienie techniki
Rentgenowska tomografia komputerowa jest metodą obrazowania, pozwalającą
na uzyskanie obrazów tomograficznych (przekrojów) badanego obiektu. Wykorzystuje
ona złożenie projekcji obiektu uzyskanych pod różnym kątem do utworzenia obrazów
przekrojowych. Projekcje uzyskiwane są w sposób podobny do wykonywania
klasycznego zdjęcia RTG. Lampa emituje promieniowanie rentgenowskie, które przy
przejściu przez badany obiekt (np. ciało pacjenta) ulega osłabieniu a następnie oświetla
detektor promieniowania, który umożliwia zapis projekcji w postaci pliku na dysku
komputera obsługującego system tomograficzny.[ 1]
Uzyskane
obrazy
przedstawiają
zatem
absorpcję
promieniowania
w
poszczególnych obszarach badanego przedmiotu, co pozwala uzyskać informacje o
strukturze przestrzennej obiektu.
Tomografia komputerowa znalazła zastosowanie w takich dziedzinach jak
medycyna (diagnoza schorzeń) [Błąd: Nie znaleziono źródła odwołania,Błąd: Nie
znaleziono źródła odwołania,Błąd: Nie znaleziono źródła odwołania,Błąd: Nie
znaleziono źródła odwołania],
technika (testowanie materiałów) [2] czy geologia
(poszukiwanie ropy naftowej)[Błąd: Nie znaleziono źródła odwołania]. Jej rozwój
został zapoczątkowany w 1968 roku przez Godfreya Newbolda Hounsfielda i Allana
MacLeoda Cormacka, którzy w 1979 roku za swój wynalazek otrzymali nagrodę Nobla.
1.1 Budowa tomografu
Od czasu pierwszego zastosowania tomografu komputerowego w medycynie, w
roku 1972 w Londynie, urządzenie to doczekało się wielu udoskonaleń mających na
celu poprawienie jakości obrazu oraz skrócenie czasu badania. [Błąd: Nie znaleziono
źródła odwołania]
-6-
Bibliografia
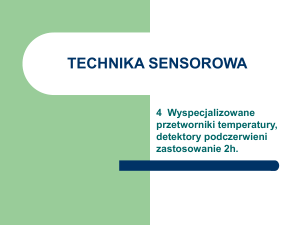
Rys. 1 Tomograf komputerowy firmy Philips. Widoczna jest gantra oraz przesuwny stół – elementy
odpowiedzialne za akwizycję obrazu. Komputer dokonujący rekonstrukcji wraz z systemem służącym do
wizualizacji zrekonstruowanych obrazów znajduje się zazwyczaj w osobnym pomieszczeniu.
Typowy tomograf komputerowy składa się z następujących elementów:
•
gantry – elementu w kształcie pierścienia zawierającego lampy
rentgenowskie oraz system detektorów, do którego wsuwany jest stół z
•
•
pacjentem podczas badania.
przesuwnego stołu, na którym leży pacjent
komputera wraz z systemem wizualizacji
1.1.1 Generowanie promieniowania rentgenowskiego
Centralnym
elementem
każdego
tomografu
jest
lampa
emitująca
promieniowanie rentgenowskie zwane też promieniowaniem X. Stanowi ono fragment
naturalnego widma elektromagnetycznego i może być generowane na drodze dwóch
różnych procesów fizycznych.
Pierwszą metodą jest wyhamowanie szybko pędzących elektronów w polu
elektromagnetycznym. W wyniku tej operacji elektrony tracą energię, która emitowana
jest w postaci kwantów promieniowania rentgenowskiego. Ten rodzaj promieniowania
X nazywamy promieniowaniem ciągłym.
Druga metoda oparta jest o zjawisko emitowania promieniowania podczas
przeskoku elektronu z powłoki o wyższym poziomie energetycznym na powłokę o
niższym poziomie. Emitowany tedy kwant energii równy jest różnicy energetycznej
tych powłok. Ponieważ każdy atom posiada określone poziomy energetyczne powłok
-7-
Badanie algorytmów rekonstrukcji obrazu tomograficznego
emitowane w ten sposób promieniowanie ma charakter dyskretny, charakterystyczny
dla danego atomu.
w obszarze anody metalowej. W wyniku tej operacji można uzyskać fale o
długościach z zakresu od 10-8m do 10-12m, co częściowo wkracza w zakres widma
ultrafioletowego oraz promieniowania gamma. Energia promieniowania ściśle zależy od
prędkości elektronu, która z kolei zależne jest od wielkości napięcia między katodą a
anodą. Wielkości te wiąże zasada zachowania energii, która stanowi, że w układzie
izolowanym suma wszystkich rodzajów energii jest stała. Korzystając z tej zasady
można sformułować wzór pozwalający określić prędkość elektronu:[ 3,Błąd: Nie
znaleziono źródła odwołania]
Równanie 1. Ua –napięcie akceleracji (napięcie pomiędzy katodą a anodą), me – masa elektronu,
v –prędkość elektronu
Napięcie używane do przyspieszenia elektronu (w przypadku diagnostyki
medycznej) wynosi od 25kV do 150kV. W zastosowaniach technicznych (nieinwazyjne
testowanie materiałów) napięcie to może sięgać aż 500kV. [Błąd: Nie znaleziono źródła
odwołania]
-8-
Bibliografia
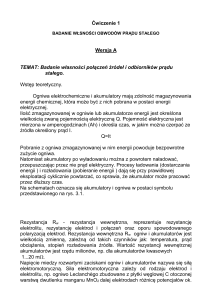
Rys. 2 Schemat generatora promieniowania rentgenowskiego. Elektrony opuszczają katodę i są
rozpędzane w polu elektrycznym, następnie uderzają w wirującą anodę generując promieniowanie.
Rysunek na podstawie [4]
Przyspieszane elektrony uderzają w metalową anodę zyskując temperaturę rzędu
2400K. Aby zapobiec przegrzaniu i szybkiemu zużyciu anody stosuje się anody
wirujące, co pozwala rozłożyć temperaturę na znacznie większą powierzchnię. Prędkość
obrotów anody jest bardzo duża (3000 obr/minBłąd: Nie znaleziono źródła odwołania),
podlega ona przeciążeniom rzędu 40g, pochłaniając ok. 30% ciepła dostarczanego przez
elektrony. Pozostała część energii cieplnej przekształcana jest w promieniowanie.
Dlatego idealny materiał z którego wykonana jest anoda powinien charakteryzować się
wysoką wytrzymałością, możliwie dużą liczbą atomową, wysoką temperaturą topnienia
i dobrym przewodnictwem cieplnym. Materiałem najlepiej spełniającym te wymagania
jest wolfram.[Błąd: Nie znaleziono źródła odwołania]
Parametry wiązki promieniowania wytwarzanego na anodzie mają istotny
wpływ na jakość zrekonstruowanego obrazu, dlatego wiązka poddawana jest filtracji
oraz kolimacji.
Wiązka może być formowana równolegle, wachlarzowo lub stożkowo. Wiązki
równoległe i wachlarzowe stosowano tomografach starszej generacji. Obecnie
wykorzystuje się wiązkę wachlarzową, która pada na wielorzędową matrycę detektorów
-9-
Badanie algorytmów rekonstrukcji obrazu tomograficznego
o dużej rozdzielczości - umożliwia to rejestrację kilku przekrojów jednocześnie, co
znacząco wpływa na czas pozyskiwania danych.[Błąd: Nie znaleziono źródła
odwołania]
Rys. 3 Przykłady różnych geometrii układów projekcyjnych.
1.1.2 Pomiar absorpcji
- 10 -
Bibliografia
Rys. 4 Projekcja badanego obiektu na detektor prostokątny. Poszczególne elementy macierzy detektora
pozwalają odczytać wartość natężenia promieniowania w danym punkcie. Odczytane wartości
zapisywane są do plików a następnie przekazywane do algorytmu odpowiedzialnego za rekonstrukcję
obiektu.
Pomiar absorpcji dokonywany jest za pomocą elementu nazywanego
detektorem. Ponieważ sam proces rozchodzenia się promieniowania jest bardzo złożony
należy mieć świadomość, że promieniowanie docierające do detektora nie tylko zostało
osłabione na drodze pochłaniania. Część z niego uległa odbiciu, rozproszeniu i
załamaniu podczas przechodzenia poprzez ośrodki o różnych gęstościach (skóra, tkanka
kostna, tkanka tłuszczowa, mięśnie).
Kolejnym problemem jest fakt, że fotony o mniejszej energii są pochłaniane
znacznie szybciej, zatem do „głębszych” warstw badanego obiektu docierają fotony o
większej energii, które charakteryzują się lepszym przenikaniem przez badany obiekt.
Zjawisko to nazywamy twardnieniem wiązki.[Błąd: Nie znaleziono źródła odwołania,
Błąd: Nie znaleziono źródła odwołania]
Tak osłabione (częściowo pochłonięte promieniowanie) dociera do detektora.
Promieniowanie nie jest mierzone bezpośrednio lecz poprzez interakcję z materiałem
detektora (np. wyemitowane fotoelektrony). Wyróżniamy detektory:
•
Gazowe
(tzw.
ksenonowe
komory
proporcjonalne)
gaz zawarty w detektorze (np. ksenon) podlega jonizacji co powoduje
powstanie mierzalnego napięcia pomiędzy katodą i anodą detektora.
Detektory tego typu były szeroko stosowane w starszych generacjach
- 11 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
tomografów ale również współcześnie można spotkać detektory
wykorzystujące sprężony ksenon.
•
Wykorzystujące scyntylatory stałe
(tzw.
detektory
scyntylacyjne)
promieniowanie jonizujące przenika przez kryształ (lub element
ceramiczny), który emituje światło widzialne, które z kolei jest mierzone
za pomocą fotodiod. Jest to najbardziej popularne rozwiązanie w
stosowanych obecnie tomografach.
Wartość mierzona przez detektor zależy od wielu czynników takich jak
temperatura, czas relaksacji po poprzednim pomiarze czy nawet zużycie materiału.
Sytuacją idealną jest gdy wszystkie detektory charakteryzują się stałymi (niezmiennymi
w czasie), identycznymi parametrami.[Błąd: Nie znaleziono źródła odwołania, Błąd:
Nie znaleziono źródła odwołania]
Detektory łączone są w większe, wielorzędowe segmenty, które (w przypadku
geometrii stożkowej) tworzą cylindryczną strukturę panelu detektora (zwaną też
matrycą). Jednostki takie mogą mieć rozmiary rzędu kilkudziesięciu centymetrów oraz
rozdzielczość rzędu kilku tysięcy pikseli.
Jednostką absorpcji promieniowania stosowana w obrazowaniu medycznym jest
HU (Hounsfield Unit). Jest to skala opracowana w celu przedstawienia w postaci liczb
całkowitych różnicy w współczynniku osłabienia promieniowania rentgenowskiego
mającego postać rzeczywistą. Początek zakresu wartości w skali HU wyznacza liczba
-1000HU, która odpowiada absorpcji powietrza. Wartość 0 odpowiada absorpcji wody.
Teoretycznie skala ta jest prawostronnie otwarta, jednak w większości przypadków
najbardziej gęste obszary tkanki kostnej osiągają górną granicę skali rzędu kilku tysięcy
HU. [Błąd: Nie znaleziono źródła odwołania]
1.1.3 Generacje urządzeń tomograficznych
Pierwsze stosowane w diagnostyce medycznej urządzenie do tomografii
komputerowej pracowało z rozdzielczością przestrzenną 80x80 pikseli, gdzie każdy
piksel reprezentował 3mm2 przy grubości przekroju równej 13mm. Czas skanowania
wynosił około 4,5 minuty a czas rekonstrukcji 20 sekund.
- 12 -
Bibliografia
Zwiększenie możliwości tomografu stało się przedmiotem badań trwających po
dzień dzisiejszy. Dążono do zwiększenia rozdzielczości oraz poprawy jakości obrazu
przy jednoczesnym skróceniu czasu skanowania. Działania te zaowocowały
powstaniem kilku generacji skanerów.
Układ projekcyjny w tomografach pierwszej generacji składał się z pojedynczej
lampy emitującej skolimowaną, punktową wiązkę promieniowania, padającą na detektor
znajdujący się po przeciwległej stronie. Skanowanie składało się z dwóch etapów.
Najpierw skanowano pojedynczą linię a następnie układ projekcyjny obracany był o 1° i
skanowanie odbywało się ponownie. Po uzyskaniu 180 projekcji przystępowano do
rekonstrukcji obrazu.
Rys. 5 Tomograf pierwszej generacji
W skanerach drugiej generacji zastąpiono wiązkę równoległą wiązką
wachlarzową oraz zwiększono ilość detektorów, co pozwoliło rozwiązać dwa
podstawowe problemy:
skróciło czas skanowania poszczególnych
linii oraz
zredukowało ilość projekcji koniecznych do rekonstrukcji obrazu. Czas akwizycji
obrazu zredukowany został do kilkunastu sekund. [Błąd: Nie znaleziono źródła
odwołania]
- 13 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 6 Tomograf drugiej generacji
Trzecia generacja urządzeń tomograficznych wyposażona została w szeroką
wiązkę wachlarzową (40° do 55°) oraz równie szeroką tablicę detektorów, co pozwoliło
wyeliminować ruch liniowy lampy. Pełny obrót układu źródło-detektor zajmował ok. 2
sekundy.
Rys. 7 Tomograf trzeciej generacji
Skanery czwartej generacji charakteryzowały się nieruchomą tablicą detektorów
w kształcie pierścienia, wewnątrz którego znajdował się badany obiekt oraz obracająca
się lampa. Liczba detektorów wynosiła od 600 do 5000. Czas badania zmniejszony
został do 1 sekundy.
- 14 -
Bibliografia
Rys. 8 Tomograf czwartej generacji
Kolejnym krokiem w rozwoju urządzeń skanujących była tomografia spiralna.
Ruchomy układ źródło-detektor wykonywał obrót w sposób ciągły podczas gdy stół z
pacjentem przesuwał się przez gantrę. Rozwiązany został w ten sposób kolejny problem
dotyczący przemieszczania się organów pacjenta w trakcie badania (płuca, serce)
ponieważ wyeliminowana została konieczność robienia przerwy na oddech dla pacjenta
po każdym skanie. Następnie skanery spiralne wyposażone zostały w wielorzędowy
detektor, który umożliwił pomiar kilku przekrojów jednocześnie.
Rys. 9 Spiralna tomografia komputerowa
1.1.4 Mikrotomografia
- 15 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Mikrotomografia jest stosunkowo nową techniką obrazowania, dzięki której
możemy otrzymać mikroskopowy obraz przekroju badanego obiektu, bez ingerencji
(niszczenia) obiektu. Podstawy teoretyczne pozyskania obrazu jak i jego rekonstrukcji
są identyczne do metod tomograficznych opisanych wcześniej. Różnica polega na tym
ze rozmiar badanego obszaru i wysoka jak dla badanego pacjenta dawka
promieniowania rentgenowskiego powoduje ze, że technika ta jest rzadko
wykorzystywana w medycynie, a znacznie częściej w innych dziedzinach nauki,
głownie biologii, naukach o materiałach, geofizyce.
Wykorzystanie wiązki stożkowej pozwala na uzyskanie znacznych powiększeń.
Badany obiekt zamocowany jest na stole obrotowym który jest obracany, podczas gdy
stożkowa wiązka promieniowania prześwietla obiekt i pada na dwuwymiarowy płaski
detektor, znajdujący się po przeciwnej stronie. Takie rozwiązanie pozwala na uzyskanie
rozdzielczości przestrzennej rzędu 1µm.[Błąd: Nie znaleziono źródła odwołania]
Mikrotomograf nie umożliwia skanowania dużych obiektów (takich jak np. ciało
pacjenta) ale jego specyfika pozwala na otrzymanie bardzo dokładnych powiększeń
obiektów o niewielkich rozmiarach (np. wycinek tkanki kostnej czy tez próbki
materiału skalnego)
- 16 -
Bibliografia
Rys. 10 Powyższy rysunek zaczerpnięty został ze książki Computed Tomography[5], rozdział 3.10 strona
95. Ilustruje on w doskonały sposób różnicę w rozdzielczości przestrzennej (dokładności) pomiędzy
skanerami microCT (rysunek a i c) i standardowymi CT (rysunek b i d). Skanowanym obiektem był ząb
neandertalczyka, żyjącego ok. 200 000 lat temu. Obrazy czarnobiałe ukazują przekrój przez ząb, obrazy
w kolorze przedstawiają wynik rekonstrukcji trójwymiarowej całego obiektu.
1.1.5 Tomosynteza
Tomosynteza to badanie diagnostyczne w którym akwizycja i rekonstrukcja
obrazu nie odbywa się w zakresie pełnego obrotu wokół osi obiektu badanego ale kąt
obrotu jest ograniczony (np. od -40° do 40°).
- 17 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Zrekonstruowany w ten sposób obraz cechuje się gorszą jakością jednak
zachowuje np. dobrą rozróżnialność obiektów o kształtach sferycznych w płaszczyźnie
prostopadłej do osi źródło-detektor. W niektórych badaniach diagnostycznych taka
informacja jest zupełnie wystarczająca (np. mammografia) a dawka promieniowania
jakiej poddany jest pacjent jest znacznie zredukowana.
Z technicznego punktu widzenia rekonstrukcja obrazu odbywa się w sposób
identyczny jak w przypadku tomografii komputerowej. Możliwe jest zastosowanie
dowolnej metody rekonstrukcji obrazu, przy czym sugeruje się, że metody algebraiczne
mogą dostarczać lepszych wyników rekonstrukcji. Zrekonstruowane przekroje (ang.
slices) łączone są w wolumin (volume), które następnie obracane jest o 90° i dzielone
na przekroje (slices) w płaszczyźnie prostopadłej do osi źródło-detektor.
Rys. 11 a) Zrekonstruowany obiekt – widok z góry. Oś źródło-detektor przebiega poziomo; b) Widok w
płaszczyźnie prostopadłej do osi źródło-detektor. Widoczne są artefakty związane z ograniczonym kątem
projekcji, jednak obiekty sferyczne zachowują dobrą rozróżnialność; c) Widok z boku. Oś źródło-detektor
przebiega poziomo.
Tomosynteza nie jest oficjalnie zaaprobowaną metodą badania – znajduje się
jeszcze w trakcie badań, które mają posłużyć znalezieniu prawidłowego miejsca jej
zastosowania w medycynie.
- 18 -
Bibliografia
1.2 Akwizycja obrazu
1.2.1 Wyjaśnienie procedury akwizycji obrazu
Rys. 12 Układ projekcyjny oraz profil uzyskany po prześwietleniu badanego obiektu wiązką równoległą
promieniowania rentgenowskiego.
Powyższy rysunek przedstawia układ źródło-detektor systemu tomograficznego
w którym pozycja źródła w stosunku do detektora nie ulega zmianie podczas całego
procesu skanowania. Wiązka równoległa składa się z promieni rozchodzących się
prostoliniowo, skierowanych w stronę detektora. Źródło oświetla zatem obiekt
promieniowaniem X, które ulega częściowej absorpcji (pochłonięciu) przechodząc
przez obiekt. Promienie padające na detektor są mierzone i zapisywane w pamięci
komputera. Taki pojedynczy pomiar nazywany projekcją. Zestawienie kolekcji
projekcji dla pojedynczej warstwy nazywamy sinogramem.
- 19 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 13 - a) obraz wejściowy przedstawiający punkt; b) sinogram uzyskany z obrazu wejściowego a; c)
odcinek o grubości 5px; d) sinogram uzyskany z obrazu c; e) fantom Shepp'a-Logan'a; f) sinogram
uzyskany z obrazu e. Mimo większego stopnia skomplikowania w dalszym ciągu możemy interpretować
go jako geometryczne złożenie sinusoid o różnych parametrach. Wszystkie obliczenia i ich wizualizacje
wykonane zostały w środowisku MATLAB.
Powyżej zaprezentowano kilka przykładowych obrazów (przekrojów) 2D oraz
odpowiadających im sinogramów.
Po wykonaniu pojedynczej projekcji układ źródło-detektor obracany jest
względem osi obiektu o kąt obrotu Θ. Kąt ten jest wcześniej ustalony i stały dla całego
procesu akwizycji obrazu. Łatwo policzyć, że jeśli Θ = 3° oraz jeśli chcemy
przeprowadzić akwizycję tak aby układ wykonał pełny obrót (360°) to ilość projekcji
będzie wynosić 120 (0°, 3°, 6° itd.).
- 20 -
Bibliografia
Najczęściej układ źródło-detektor wykonuje pełny obrót (360°), jednak możliwe
jest także wykonanie rekonstrukcji na bazie projekcji z zakresu 0°-180°. Zwłaszcza w
przypadku wiązki równoległej, jakość rekonstrukcji może być w wybranych
przypadkach akceptowalna.
Wzornik gęstości (fantom) jako narzędzie umożliwiające analizę jakości
algorytmów rekonstrukcyjnych. Tomografia komputerowa pozwala nam uzyskać obraz
przekroju przez badany obiekt. Z technicznego punktu widzenia jest to informacja
bardzo pożądana jednak w praktyce trudna do weryfikacji ponieważ przeważnie nie są
znane szczegółowe dane badanego obiektu (takie jak rozmieszczenie jego składowych
czy ich względna gęstość i absorpcja). Najczęściej też nie jest możliwe wykonanie
przekroju obiektu w celu weryfikacji wyniku (np. gdy skanowana jest głowa pacjenta
lub w przypadku nieinwazyjnego testowania materiałów na linii produkcyjnej).
Na etapie konstruowania i testowania poprawności działania aparatury
tomograficznej oraz oprogramowania do rekonstrukcji obrazu konieczne jest posiadanie
obiektu o znanych i precyzyjnie określonych właściwościach. Taka sytuacje pozwala
zbadać obiekt (wykonać akwizycję obrazu za pomocą tomografu), zrekonstruować
zgromadzone dane, a następnie porównać obraz wyjściowy (wynikowy) ze znanym nam
obiektem wejściowym (skanowanym).
Porównanie takie jest konieczne w celu weryfikacji poprawności działania całej
procedury (w tym oprogramowania) oraz w celu ewentualnej poprawy jakości
pozyskiwanego obrazu (poprzez zastosowanie odpowiedniej korekcji czy filtrowania).
Obiekt zaprojektowany do testowania procedury rekonstrukcji nazywany jest
wzornikiem a częściej fantomem (ang. phantom). Jest to najczęściej zestaw kilku
obiektów elementarnych rozmieszczonych w określony sposób, posiadających różny
(lecz ściśle określony) rozmiar oraz gęstość. Obiekty te mogą być wykonane z różnego
rodzaju żywic epoksydowych lub innych substancji.[Błąd: Nie znaleziono źródła
odwołania]
Użycie fantomu numerycznego tj. opisanego za pomocą odpowiednich wielkości
fizycznych, pozwala również na rozpatrywanie całego procesu akwizycji i rekonstrukcji
obrazu jako złożonego układu równań matematycznych. Możemy również rozpatrywać
proces projekcji jako sumę projekcji poszczególnych elips. Oba te założenia mogą się
- 21 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
przyczynić do ułatwienia weryfikacji poprawności działania algorytmu.[Błąd: Nie
znaleziono źródła odwołania]
Rys. 14 Shepp-Logan Phantom zaimplementowany w środowisku MATLAB. Funkcja phantom(n)
umożliwia wygenerowanie fantomu o rozmiarze n x n pikseli, co stanowi duże ułatwienie w testowaniu
algorytmów.6
W historii tomografii powstały różne rodzaje fantomów, jednak najbardziej
popularnym jest fantom Shepp’a-Logan’a (ang. Shepp-Logan Phantom). Składa się on z
10
elips
o
gęstości
określonej
za
pomocą
współczynników
względnych,
rozmieszczonych w określony sposób (patrz Rys Rys. 15]). Porównując wynik
rekonstrukcji z fantomem możemy określić jakość algorytmu rekonstrukcyjnego,
występujące artefakty oraz dokładność z jaką odzwierciedla obiekty o niewielkim
rozmiarze lub niewielkiej gęstościBłąd: Nie znaleziono źródła odwołania,Błąd: Nie znaleziono
źródła odwołania
.
Uznaje się, że rekonstrukcja tomograficzna obszaru czaszki i mózgu człowieka
wymaga najwyższej dokładności numerycznej i powinna być przeprowadzona w taki
sposób aby powstałe artefakty były jak najmniejsze.
- 22 -
Bibliografia
Rys. 15 Shepp-Logan Phantom. Opis matematyczny zamieszczony w książce Principles of Computerized
Tomographic Imaging 7. Podane wartości oznaczają gęstość obiektu. Obiekty ułożone są uproszczonym
modelem czaszki człowieka. Elipsy a i b przedstawiają kości czaszki, e – móżdżek, h, j oraz i symulują
zmiany nowotworowe. Porównując wynik rekonstrukcji z fantomem możemy określić jakość algorytmu
rekonstrukcyjnego, występujące artefakty oraz dokładność z jaką odzwierciedla obiekty o niewielkim
rozmiarze lub niewielkiej gęstości.
W niniejszej pracy wykorzystany został również rozszerzony fantom Shepp’aLogan’a,
zaprojektowany
na
University
of
Patras,
przez
dra
Zachariasa
Kamarianakisa. Charakteryzuje się on zwiększoną liczbą obiektów składowych, co
pozwala na bardziej wnikliwą analizę działania algorytmu rekonstrukcyjnego. Jest to
tzw. fantom software’owy, co oznacza że jego matematyczny opis używany jest przez
oprogramowanie symulujące pracę tomografu do wytworzenia odpowiednich danych
(projekcji), które są używane następnie do rekonstrukcji.
- 23 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 16 rozszerzony fantom Shepp’a-Logan’a, zaprojektowany na University of Patras, przez
dra Zachariasa Kamarianakisa. Rysunek wykonany został przez autora phantomu.
Dane matematyczne dotyczące rozmieszczenia i współczynników pochłaniania
promieniowania dla obiektów składowych opisuje załączona tabela, gdzie każdy wiersz
odpowiada opisowi jednego z rysunku Rys. 16]
Nr
x0,y0,z0, [mm]
obiektu
X, Y, Z półosie, [mm]
Współczynnik
osłabienia [mm-1]
1
(0.0, 0.0, 0.0)
(92.0, 90.0, 69.0)
2.00
2
(-1.84, 0.0, 0.0)
(87.4, 88.0, 66.24)
1.02
3
(0.0, -25.0, -22.0)
(16.0, 21.0, 41.0)
1.00
4
(0.0, -25.0, 22.0)
(11.0, 22.0, 31.0)
1.0
5
(35.0, -25.0, 0.0)
(21.0, 35.0 25.0)
1.03
6
(10.0, -25.0, 0.0)
(4.6, 4.6, 4.6)
1.03
7
(-60.5, -25.0, -8.0)
(2.3, 2.0, 4.6)
1.03
8
(-60.5, -25.0 6.0)
(2.3, 2.0, 4.6)
1.03
- 24 -
Bibliografia
9
(-10.5, 62.5, 6.0)
(4.0, 10.0, 5.6)
1.04
10
(10.0, 62.5, 0.0)
(5.6, 10.0, 5.6)
1.00
11
(-10.0, -25.0, 0.0)
(4.6, 4.60, 4.6)
1.03
12
(-60.5, -25.0, 0.0)
(2.3, 2.30, 2.3)
1.03
Tabela 1. Matematyczny opis rozszerzonej wersji fantomu skonstruowanego przez dra Zachariasa
Kamarianakisa w University of Patras.
Rys. 17 Rozszerzony fantom Shepp’a-Logan’a – projekcja równoległa „obserwowana” na detektorze.
Powyższy obraz przedstawia symulowany odczyt z detektora podczas projekcji całego fantomu (3D).
Widoczne są poszczególne obiekty składowe, ich „jasność” jest proporcjonalna do gęstości ujętej w tabeli
[Tabela 1]
Jakość obrazu zrekonstruowanego zawsze będzie niższa niż jakość obrazu
wejściowego. Wynika to z faktu, że aby uzyskać obraz wejściowy należałoby wykonać
nieskończenie wiele projekcji z nieskończenie małym krokiem obrotu. W praktyce jest
- 25 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
to niemożliwe, spotyka się wręcz dodatkowe ograniczenia związane z ujemnym
efektem napromieniowania pacjenta czy długim czasem pozyskiwania projekcji. Choć
obraz wynikowy nie będzie wolny od drobnych błędów i artefaktów, fantomy są
cennym narzędziem pozwalającym na zminimalizowanie jednych i drugich.
1.3 Rekonstrukcja obrazu
1.3.1 Transformata Radona
Aby lepiej zrozumieć transformatę Radona należy wprowadzić najpierw pojęcie
całki liniowej.
Całka liniowa to pojęcie opisujące wynik całkowania obiektu po zadanym
parametrze wzdłuż linii prostej. Najłatwiej jest zrozumieć to pojęcie poprzez
wyobrażenie sobie dowolnej funkcji dwuwymiarowej f(x,y). Standardową całkę takiej
funkcji można zobrazować jako objętość pod jej wykresem. Jeśli wytyczyć dowolną
linię prostą l w płaszczyźnie osi x, y to całkę liniową dla linii l można zobrazować jako
pole powierzchni pod wykresem funkcji f liczone wzdłuż linii l.
Każdy
obraz
dwuwymiarowy
możemy
rozpatrywać
jako
funkcję
dwuwymiarową f(x,y), która każdemu pikselowi przypisuje pewną wartość c opisującą
kolor (lub odcień szarości).
f(x,y) = c
Równanie 2. Funkcja obrazu f(x,y) przypisuje każdemu pikselowi wartość
barwy. Wartości x i y określają współrzędne piksela, c – wartość barwy.
Jeśli przeprowadzimy przez taki obraz dowolną linię prostą to będziemy w
stanie policzyć wartość całki liniowej dla tej linii.
W praktyce, prześwietlenie badanego obiektu pojedynczym promieniem
rentgenowskim odpowiada właśnie całkowaniu liniowemu funkcji f(x,y) po linii
przebiegu promienia. Wyliczoną wartość całki możemy powiązać z wartością projekcji
odczytaną w danym detektorze.
- 26 -
Bibliografia
Rys. 18 Przedstawienie problemu pomiaru projekcji jako operacji całkowania liniowego.
Każdy promień (prostą) można scharakteryzować określając jego kąt nachylenia
θ względem osi OY oraz jego odległość t względem środka układu współrzędnych.
Równanie normalne prostej charakteryzuje się takimi właśnie parametrami:
Równanie 3. Równanie normalne prostej - x, y – współrzędne punktu, θ – kąt pomiędzy
prostą a osią oy, t – odległość prostej od środka układu współrzędnych.
Możemy uznać zatem, że powyższe równanie „wybiera” zbiór wszystkich
punktów tworzących linię prostą o zadanych parametrach p i θ spośród wszystkich
- 27 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
punktów obrazu. Sumę wartości funkcji f(x,y) dla wszystkich tych punktów można
powiązać z wartością mierzoną w detektorze.
Pełen zestaw całek liniowych nazywamy transformatą Radona. Jest to narzędzie
matematyczne (rodzaj operatora) przekształcające jedną funkcję w drugą. W
przedstawionym powyżej przypadku funkcja obrazu f(x,y), która ulega przekształceniu
w funkcję profilu obrazu p(θ, t). Takie przedstawienie procesu daje nam matematyczny
opis etapu akwizycji danych.
Jeśli określić operację transformacji Radona poprzez operator
to cały proces
transformacji oraz transformacji odwrotnej można przedstawić w następujący sposób:
Równanie 4. Transformata Radona. x, y – współrzędne punktu, f – funkcja obrazu, p –
funkcja profilu, θ – kąt pomiędzy prostą po której odbywa się całkowani a osią oy, t –
odległość prostej od początku układu współrzędnych.
Równanie 5. Odwrotna transformata Radona. g – funkcja obrazu zrekonstruowanego.
Pozostałe parametry opisane w równaniu 4.
1.3.2 Odwrotna transformata Radona
W poprzednim rozdziale wykazano , że proces akwizycji danych można przedstawić
w postaci transformaty Radona. Dzięki temu można wykorzystać teraz odwrotną
transformatę Radona jako narzędzie pozwalające na odtworzenie funkcji obrazu f(x, y) z
funkcji profilu p(t, θ).
Należy zauważyć, że w praktyce funkcja wejściowa f(x ,y) nie jest znana, a proces
transformacji Radona nie jest fizycznie wykonywany. Projekcje zostają utworzone
poprzez pomiar natężenia promieniowania przechodzącego przez obiekt pod różnym
kątem. Po wykonaniu odwrotnej transformaty Radona na otrzymanych projekcjach
uzyskuje się aproksymowane wartości funkcji f(x ,y).
- 28 -
Bibliografia
Rysunek Rys. 19] przedstawia ideę odwrotnej transformacji Radona. Dla każdego
kąta θ funkcja projekcji p(t, θ) zostaje rozsmarowana wzdłuż linii po których odbywało
się całkowanie. Każdemu punktowi znajdującemu się na linii x·cos θ + y·sin θ = t
przypisana zostaje ta sama wartość, równa p(t, θ) . Po wykonaniu tej operacji dla całego
zakresu wartości θ otrzymujemy obraz wynikowy g(x, y).
Rys. 19 Proces odwrotnej transformacji Radona. Kolejno, dla każdego kąta θ funkcja projekcji p(t, θ)
zostaje rozsmarowana wzdłuż linii po których odbywało się całkowanie. Każdemu punktowi
znajdującemu się na linii x·cos θ + y·sin θ = t przypisana zostaje ta sama wartość, równa p(t, θ) .
Wykonanie transformacji odwrotnej dla pojedynczej projekcji nie zwraca obrazu źródłowego ale już
transformacja w zakresie wszystkich wartości θ pozwala na uzyskanie obrazu bardzo zbliżonego do
wejściowego. Otrzymujemy w ten sposób funkcję g(x ,y), która jest aproksymacją funkcji f(x ,y)
Aby otrzymać obraz o satysfakcjonującej jakości konieczne jest wcześniejsze
przygotowanie projekcji. Wykonuje się je poprzez filtrację każdej projekcji w
dziedzinie częstotliwości.
- 29 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Odwrotna
transformata
Radona
jest
narzędziem
matematycznym,
które
wykorzystywane jest w algorytmie rekonstrukcyjnym opartym na wstecznej projekcji
(ang. Back Projection, BP). Jeśli projekcje wejściowe zostały wcześniej specjalnie
przygotowane (przefiltrowane), mówimy o algorytmie wstecznej projekcji z filtracją
(ang. Filtered Back Projection, FBP). Metody te zostały opisane w rozdziałach: 1.4.2,
1.4.3, 1.4.4.
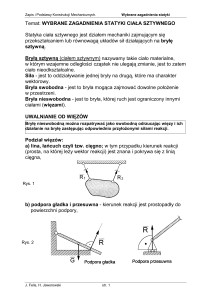
1.3.3 Zniekształcenia obrazu
Podstawowym
warunkiem
uzyskania
obrazu
bez
zniekształceń
jest
zdefiniowanie funkcji projekcyjnej p(t, θ) w postaci ciągłej, tzn. dla wartości zarówno t
jak i θ należących do zbioru liczb rzeczywistych. W praktyce zakres wartości t
odpowiada liczbie detektorów w urządzeniu (których liczba jest skończona i posiadają
określoną szerokość) natomiast zakres wartości θ ulega dyskretyzacji najczęściej ze
względów medycznych – ilość promieniowania jaką może przyjąć pacjent jest mocno
ograniczona. W takiej sytuacji należy liczyć się z faktem, że funkcja g(x,y) będzie
jedynie przybliżeniem obrazu rzeczywistego, zależnym od rozdzielczości przestrzennej
tablicy detektorów oraz kroku obrotu Δθ.
Kolejny problem dotyczy dyskretyzacji obrazu (czyli wartości funkcji g(x ,y)).
Skończona jest zarówno rozdzielczość przestrzenna rekonstruowanego obrazu
(zazwyczaj rzędu kilku tysięcy pikseli) jak i zakres wartości samej funkcji, który w celu
zaprezentowania na ekranie często ograniczany jest do 256 odcieni szarości, ze względu
na specyfikę ludzkiego oka. Ograniczenie rozdzielczości przestrzennej powoduje
konieczność zastosowania interpolacji przy obracaniu obrazu (każda rozsmarowana
projekcja obrócona zostaje o odpowiadającą jej wartość kąta θ). Problem interpolacji
zilustrowany został na rysunku Rys. 23]
- 30 -
Bibliografia
Rys. 20 Fragment fantomu Shepp’a-Logana z zastosowaniem różnego rodzaju interpolacji. Rysunek a –
interpolacja ‘nearest-neighbor’, b – ‘spline interpolation’, c – obraz oryginalny. Można zaobserwować
różne rodzaje artefaktów w zależności od zastosowanego rodzaju interpolacji.
- 31 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 21 Artefakt spowodowany twardnieniem wiązki. Rysunek a ilustruje rzeczywisty przekrój obiektu
wraz z profilem. Rysunek b przedstawia artefakt obecny na obrazie rekonstruowanym. Profile pod
rysunkami przedstawiają gęstość badanego obiektu. Artefakt tego rodzaju występuje głównie, gdy obiekt
o mniejszej gęstości otoczony jest obiektem o gęstości znacznie większej. Sytuacja taka
charakterystyczna jest dla tomografii głowy człowieka, gdzie mózg otoczony jest kościami czaski.
Dodatkowym ograniczeniem jest jakość wytworzonego promieniowania
rentgenowskiego. Należy zapewnić stałość jego natężenia w trakcie wykonywania
badania oraz równomierny rozkład wiązki. Bardzo ważnym czynnikiem jest też
monochromatyczność promieniowania, czyli stała długość fali w całej wiązce.
Wszystkie wyemitowane elektrony powinny charakteryzować się jednakową energią, co
w praktyce nie jest możliwe do uzyskania. Prowadzi to do sytuacji gdzie natężenie
promieniowania nie jest zależne jedynie od odległości od jego źródła ale również od
interakcji pomiędzy promieniowaniem a materiałem przez który ono przenika. W
efekcie fotony o mniejszej energii są pochłaniane znacznie szybciej, zatem do
- 32 -
Bibliografia
„głębszych” warstw badanego obiektu docierają fotony o większej energii, które
charakteryzują się lepszym przenikaniem przez badany obiekt. Jest to zjawisko
„twardnienia wiązki”, opisane w rozdziale 1.1.2
Rys. 22 Artefakty wynikające z obecności przedmiotów o relatywnie dużej gęstości (wypełnienie stałe
zęba) podczas tomografii szczęki. Obraz a przedstawia schemat poglądowy (prześwietlenie z boku),
obrazy b, c, d to kolejne przekroje przez szczękę pacjenta (wykonane na różnej „wysokości”). Wyraźnie
widoczne jest zjawisko zwiększania się artefaktów w zależności od ilości materiału o podwyższonej
gęstości. Obraz zaczerpnięty został z książki Computed Tomography[Błąd: Nie znaleziono źródła
odwołania]
Zniekształcenia powstałe w opisany wyżej sposób nazywa się artefaktami.
Przyczyny ich powstawania mogą wynikać z procesów fizycznych zachodzących
podczas skanowania obiektu ale mogą też być efektem działania algorytmu
rekonstrukcyjnego (błędy zaokrągleń lub zbyt mała ilość danych)
- 33 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 23 Wizualizacja zależności pomiędzy jakością obrazu a wartością Θ; a) Θ = 20°; b) Θ = 8°; c)
Θ = 3°; d) Θ = 1°; Przypadkiem idealnym jest sytuacja gdy Θ dąży do 0.
1.4 Techniki rekonstrukcji obrazu
1.4.1 Omówienie rekonstrukcji na przykładzie wstecznej projekcji i wiązki
równoległej
- 34 -
Bibliografia
Układ projekcyjny w którym wykorzystuje się wiązkę równoległą oraz
obracający się układ źródło-detektor jest pod względem geometrycznym, najłatwiejszy
do opisania i przedstawienia. Również metoda wstecznej projekcji jest jedną z
prostszych do zrozumienia metod rekonstrukcji.
Profil uzyskany podczas projekcji pod każdym z kątów ulega rozsmarowaniu na
powierzchnię
o
rozmiarach
równych
rozmiarom
rekonstruowanego
obrazu.
W uproszczeniu możemy określić ten proces jako operację odwrotną do procedury
całkowania liniowego, opisanej w rozdziale 1.3.1 i zbieżną z procedurą odwrotnej
transformaty Radona opisanej w rozdziale 1.3.2.
Rys. 24 Uzyskany profil oraz rozsmarowana projekcja.
Następnie tak przygotowane obrazy są normalizowane oraz nakładane na siebie
(łączone). Proces normalizacji polega na podzieleniu wartości każdego piksela poprzez
ilość wszystkich projekcji. W ten sposób po złożeniu obrazów oryginalny zakres
wartości pozostanie zachowany.
- 35 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 25 Uproszczony schemat rekonstrukcji techniką wstecznej projekcji. Zrekonstruowany obraz jest
złożeniem trzech rozsmarowanych projekcji, uzyskanych z profili zmierzonych pod kątem 0°, 45° i 90°.
- 36 -
Bibliografia
Poniżej przedstawiony jest proces rekonstrukcji obrazu metodą wstecznej
projekcji na przykładzie fantomu Shepp’a-Logan’a wykonanej dla obrazu wejściowego
o wymiarach 256 × 256 pikseli.
Rys. 26 Etapy rekonstrukcji fantomu Shepp’a-Logan’a. a) Pierwszy slice – rozsmarowana projekcja
wykonana pod kątem 0°; b) Projekcje w zakresie 0°-10° po połączeniu obrazów składowych; c) Projekcje
w zakresie 0°-90° po połączeniu obrazów składowych; d) Projekcje w zakresie 0°-180° po połączeniu
obrazów składowych – obraz zrekonstruowany.
- 37 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
1.4.2 Metody oparte na technice wstecznej projekcji
Choć użycie odwrotnej transformaty Radona wydaje się idealnym rozwiązaniem
problemu rekonstrukcji, w praktyce konieczne jest uwzględnienie wielu ograniczeń,
które przedstawione zostały w rozdziale 1.3.3
Metody oparte na wstecznej projekcji charakteryzują się akceptowalną jakością
rekonstrukcji oraz (co istotne) niewielką ilością czasu (nakładu obliczeniowego)
potrzebnego do zrekonstruowania obrazu. Zyskały sobie one dużą popularność również
ze względu na łatwość implementacji.
1.4.3 Metoda wstecznej projekcji bez filtracji
Metoda projekcji wstecznej, niepoprzedzona procesem filtracji nie daje dobrych
wyników rekonstrukcyjnych. Uzyskane w ten sposób obrazy cechują się niską jakością,
szczegóły są niewyraźne i zamazane. Metoda została przedstawiona jedynie w celu
wprowadzenia do metody wstecznej projekcji z filtracją.
Proces rekonstrukcji odbywa się zgodnie z zasadą działania odwrotnej
transformacji Radona, przedstawioną w rozdziale 1.3.2, jednak uzyskany obraz
charakteryzuje się wszystkimi niedoskonałościami opisanymi w rozdziale 1.3.3.
Funkcja projekcyjna p(θ, t) nie jest w żaden sposób przygotowana ani filtrowana.
Na rysunku Rys. 27] przedstawiony został wynik rekonstrukcji omawianą
metodą. Rekonstrukcję wykonano z 180 projekcji wykonanych wiązką równoległą, co 1
stopień, z użyciem 1024 detektorów. Projekcje uzyskano poprzez symulację wykonaną
w środowisku MATLAB.
- 38 -
Bibliografia
Rys. 27 Powyższy obraz przedstawia rekonstrukcję fantomu Shepp’a-Logan’a. Wykonane zostało 180
projekcji wiązką równoległą (co 1 stopień), przy użyciu 1024 detektorów. Uzyskany obraz ma wymiary
1024x1024 piksele.
1.4.4 Metoda wstecznej projekcji z filtracją
Metoda wstecznej projekcji z filtracją różni się od metody bez filtracji,
przedstawionej w rozdziale 1.4.3, operacją filtrowania funkcji projekcyjnej. Każda
projekcja podlega filtrowaniu w dziedzinie częstotliwości.
Ponieważ funkcję projekcyjną możemy przedstawić w postaci sinogramu (który
jest zestawem kolejnych projekcji pod określonym kątem) można powiedzieć, że proces
filtrowania projekcji tożsamy jest z filtrowaniem sinogramu.
- 39 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 28 Różne rodzaje funkcji filtrujących. a – Ramachadran and Lakshminarayanan, b- filtr kosinusowy
I, c- Shepp and Logan, d – filtr kosinusowy II. Po lewej stronie przedstawiono charakterystykę filtra w
- 40 -
Bibliografia
dziedzinie przestrzennej a po prawej stronie widmo w dziedzinie częstotliwości. Obrazek zaczerpnięto z
książki „Computed Tomography”[Błąd: Nie znaleziono źródła odwołania]
Filtrowanie obrazu (sinogram możemy traktować jako obraz) w dziedzinie
częstotliwości polega na przekształceniu każdego wiersza obrazu do postaci widma, za
pomocą transformacji Fouriera. Następnie wynik mnożony jest przez funkcję filtrującą.
Możliwe jest zastosowanie różnych rodzajów funkcji. Po wymnożeniu wykonywana
jest wsteczna transformacja Fouriera. Przefiltrowany w ten sposób sinogram używany
jest do dalszego procesu rekonstrukcji, który jest identyczny z wcześniej już opisanym.
Rys. 29 Powyższy obraz przedstawia rekonstrukcję z filtrowaniem fantomu Shepp’a-Logan’a. Wykonane
zostało 180 projekcji wiązką równoległą (co 1 stopień), przy użyciu 1024 detektorów. Uzyskany obraz
ma wymiary 1024x1024 piksele. Zastosowany został filtr Ramachadran and Lakshminarayanan
- 41 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 30 Sinogram zawierający projekcje fantomu zrekonstruowanego na rysunkach Rys. 27] – a (wersja
bez filtracji) i [Rys. 29] – b (wersja z filtracją). Sinogram przedstawiony na rysunku b odpowiada sino
gramowi przedstawionemu na rysunku b przefiltrowanemu za pomocą funkcji Ramachadran and
Lakshminarayanan.
Mnożenie w dziedzinie częstotliwości odpowiada operacji konwolucji w
dziedzinie przestrzennej. W zależności od zastosowanego filtra można otrzymać różny
efekt na obrazie wynikowym. Różne rodzaje filtrów przedstawiono na rysunku Rys. 28]
- 42 -
Bibliografia
1.5 Metody algebraiczne
1.5.1 ART.
W rozdziale [1.3.1] przedstawiona została problematyka przedstawienia projekcji
jako operacji całkowania liniowego w dziedzinie ciągłej. Bazując na tej metodzie
można w przystępny sposób wyjaśnić podstawy rekonstrukcji algebraicznej.
O ile rozpatrywanie procesu projekcji jako procesu wyliczania całek liniowych może
wydawać się nieco skomplikowane dla dziedziny ciągłej, o tyle dla dziedziny dyskretnej
ulega ono znacznemu uproszczeniu. Możliwość przejścia do dziedziny dyskretnej
wynika ze specyfiki układu projekcyjnego. Układ źródło-detektor wykonuje
skończoną ilość obrotów i mierzy projekcje skończoną ilością detektorów. Z kolei od
algorytmu rekonstrukcyjnego oczekujemy aby wygenerował wynik w postaci obrazu
złożonego ze skończonej ilości pikseli o skończonej wartości odcieni szarości.
Poruszając się w dyskretnej dziedzinie wartości, funkcję opisującą obraz możemy
zdefiniować jako tablicę pikseli, z których każdy charakteryzowany jest numerem
wiersza i kolumny. Funkcję f(x,y) możemy zatem zastąpić funkcją g(m,n), gdzie m i n
odpowiadają numerowi wiersza i kolumny.
Należy przyjąć również założenie dotyczące promienia. O ile w przypadku
transformacji Radona promień charakteryzował się nieskończenie małą szerokością o
tyle w przypadku metod algebraicznych zakłada się określoną szerokość promienia i
ściśle wyróżnia się prostą wyznaczającą jego początek oraz koniec. Takie podejście
pozwala nam obliczyć dla każdego promienia i dla każdego piksela współczynnik
przecięcia (promienia r z pikselem s). Jak łatwo zauważyć w większości przypadków
współczynnik ten będzie równy zero – pozwala to na znaczną optymalizację procesu
obliczeniowego.
- 43 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 31 Przedstawienie problemu pomiaru projekcji jako operacji całkowania liniowego w dziedzinie
dyskretnej.
Całkowanie zastępujemy operacją sumowania. Suma liniowa 1 funkcji obrazu g(m,n)
po linii l odpowiada więc sumie wartości wszystkich pikseli z tablicy, przez które
„przebiega” prosta opisana równaniem x · cos θ – y · sin θ = t. Suma ta jest dla nas
wartością projekcji p generowanej przez promień.
W praktyce dysponujemy skończoną, znaną liczbą detektorów. Możemy
przyjąć, że dla każdego detektora d istnieje dokładnie jedna prosta l a wartość
projekcji p odczytana na detektorze d odpowiada wartości powstałej w wyniku
operacji całkowania liniowego funkcji obrazu g(m,n) po linii l.
1
Suma liniowa nie jest ścisłym pojęciem matematycznym. Autor wprowadził pojęcie sumy liniowej
aby umożliwić czytelnikowi łatwiejsze zrozumienie problemu. Sumę liniową należy rozumieć jako wynik
operacji całkowania liniowego w dziedzinie dyskretnej.
- 44 -
Bibliografia
Sytuację przedstawioną na rysunku Rys. 31] można rozpatrywać jako układ równań,
gdzie każdy promień odpowiada pojedynczemu równaniu.
Niech p1 oznacza wartość natężenia promienia r1 zmierzoną na detektorze. Promień
r1 posiada współczynnik przecięcia z każdym pikselem s. Współczynnik ten wyraża
stosunek powierzchni przecięcia do powierzchni całego piksela i może przyjmować
wartości z zakresu <0, 1>. Współczynnik przecięcia promienia r1 z pikselem s1
oznacza się symbolem
. Piksel s1 posiada gęstość oznaczaną poprzez ds1 Wartość
zmierzona na detektorze zależna jest od gęstości pikseli które przeciął promień. Dla
każdego detektora (zatem również dla każdego promienia) możemy zapisać równanie:
Równanie 6. Układ równań rekonstrukcyjnych. Opis parametrów w treści
rozdziału.
Powyższe równania tworzą układ równań projekcyjnych. Ilość wszystkich
równań można wyznaczyć wymnażając ilość wszystkich promieni przez ilość
wszystkich obrotów układu źródło-detektor wokół obiektu.
Rozwiązanie układu równań prowadzi do otrzymania zrekonstruowanego obrazu
(czyli funkcji wyjściowej g(m, n) ).
Rozwiązanie przedstawionego układu równań metodą podstawiania jest bardzo
czasochłonne dlatego stosuje się metodę zaproponowaną przez polskiego uczonego
S. Kaczmarza w roku 1937, zwaną też metodą rzutowania, opisaną w książce
“Angenaherte auflosung von systemen linearer gleichungen”[ 8]. Metoda rzutowania
- 45 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
pozwala uzyskać
przybliżony wynik,
który charakteryzuje
się dokładnością
zwiększającą się w miarę wykonywania kolejnych iteracji.
Zasadę działania metody rzutowania opisać można w następujących krokach:
1. Zdefiniowanie obrazu początkowego (przyjmuje się, że wartość funkcji
g(m, n) dla wszystkich pikseli wynosi 0
2. Dla każdego kąta obrotu:
o Dla każdego promienia:
Obliczenie wartości projekcji dla obrazu wyjściowego
Porównanie obliczonej wartości z rzeczywistą wartością
funkcji projekcyjnej pozyskanej z obrazu źródłowego..
Obliczenie wartości współczynnika korekcji
Aktualizacja wartości każdego piksela w obrazie
wynikowym.
3. Jeśli jakość uzyskanego w ten sposób obrazu jest akceptowalna można
zakończyć algorytm. W przeciwnym wypadku należy powrócić do
kroku 2.
- 46 -
Bibliografia
Rys. 32 Kolejne kroki rekonstrukcji obrazu o wymiarach 4x4 piksele. a if – wartość projekcji dla obrazu
wynikowego, pi – rzeczywista wartość projekcji dla obrazu wejściowego, a if- pi – Wartość współczynnika
korekcji dla promienia. Rysunek zaadaptowany z książki „Computed Tomography”[Błąd: Nie znaleziono
źródła odwołania]
Metoda rzutowania wykorzystana w algorytmie nie jest przedmiotem pracy
magisterskiej. Szczegółowy opis metody, wraz z uzasadnieniem matematycznym można
znaleźć w książce „Principles of Computed Tomography” [Błąd: Nie znaleziono źródła
odwołania]
- 47 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
1.5.2 Odmiany metody ART
Podstawowa metoda rekonstrukcji algebraicznej doczekała się wielu odmian, z
których
najpopularniejsze
noszą
nazwę
SIRT
(ang.
Simultaneous
Iterative
Reconstruction Tomography) i SART (ang. Simultaneous Algebraic Reconstruction
Technique) . Wprowadzono w nich drobne modyfikacje polegające na zmianie
momentu aktualizacji obrazu wynikowego współczynnikiem korekcyjnym oraz
zastąpieniu tradycyjnego podejścia polegającego na przedstawianiu obrazu jako zbioru
pikseli nowym podejściem, wykorzystującym elementy bilinearne (ang. bilinear
elements).
Zastosowane zmiany pozwoliły zmniejszyć nakład obliczeniowy niezbędny do
rekonstrukcji oraz zwiększyć dokładność obrazu wynikowego a także ilość iteracji
koniecznych do uzyskania obrazu o dobrej jakości.
Metoda rekonstrukcji algebraicznej opisana w rozdziale 1.5.1 wykorzystywana
była w algorytmie rekonstrukcyjnym pierwszego skonstruowanego tomografu.
Rekonstruowany obraz posiadał wymiary 80x80 pikseli a jego rekonstrukcja trwała 9
dni.
1.6 Oddziaływanie promieniowania rentgenowskiego
na człowieka
1.6.1 Szkodliwe działanie promieniowania jonizującego
Szkodliwe oddziaływanie promieniowania rentgenowskiego odnotowano już
wkrótce po jego wynalezieniu. Lekarze wykorzystujący promieniowanie X do celów
diagnostycznych zwrócili uwagę na uszkodzenia skóry kończyn badanych pacjentów.
Kolejnym krokiem na drodze pogłębiania świadomości szkodliwego działania
promieniowania jonizującego był raport ONZ z 1962 r. w którym przedstawiono wyniki
badań wykazujące, że udział promieniowania pochodzącego z rentgenodiagnostyki jest
- 48 -
Bibliografia
dziesięciokrotnie większy niż promieniowania pochodzącego z opadu radioaktywnego
po wybuchu jądrowym.[9]
Zaproponowanych zostało wiele rozwiązań mających na celu zminimalizowanie
dawki promieniowania na jaką narażony jest pacjent w trakcie badania. Do najbardziej
popularnych należą:
•
Skrócenie czasu badania a tym samym czasu ekspozycji pacjenta na
•
•
•
•
promieniowanie rentgenowskie
Zwiększenie ilości detektorów w matrycy
Zastosowanie przysłon głębinowych i filtrów
Tomografia spiralna
Tomosynteza
Obecnie każdy pacjent objęty jest ochroną radiologiczną, która szczegółowo
określa graniczne wartości dawki promieniowania jaka może zostać przyjęta w okresie
czasu.
Przeprowadzono również szereg badań dotyczących rzeczywistej szkodliwości
promieniowania w zabiegach medycznych. Korzyści płynące z zastosowania
promieniowania X do celów diagnostycznych są oczywiste, jednak wykorzystanie
promieniowania rentgenowskiego np. do badań przesiewowych (tzw. Screeningu) jest
mocno dyskutowane, zwłaszcza w kontekście przewagi rzeczywistych korzyści nad
potencjalnym ryzykiem związanym z ekspozycją na promieniowanie. [10,11]
1.6.2 Potencjalne zagrożenia dla pacjenta
Ekspozycja na promienie rentgenowskie może prowadzić do uszkodzenia
łańcucha DNA w komórkach ciała człowieka oraz do mutacji genów. Dodatkowo,
przyjęcie dużej dawki promieniowania (np. w skutek wadliwego działania aparatury)
może prowadzić do poparzenia ciała i choroby popromiennej.
W normalnych warunkach komórki z uszkodzonym łańcuchem DNA powinny
być w stanie wykryć uszkodzenie i zregenerować fragment łańcucha. Jeśli operacja ta
nie jest możliwa komórka powinna uruchomić mechanizmy prowadzące do jej
zaplanowanej śmierci (tzw. apoptoza). Rzeczywisty problem powstaje w sytuacji gdy
pod wpływem promieniowania jonizującego dojdzie do takiego uszkodzenia kodu
- 49 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
DNA, które nie jest możliwe do regeneracji i nie jest możliwe zadziałanie mechanizmu
apoptozy. Taka sytuacja może prowadzić do powstania nowotworu.
1.7 Analiza literatury
Literatura dotycząca zagadnień związanych z tomografią komputerową jest
bardzo obszerna i stale poszerzana o nowe publikacje. Oprócz pozycji traktujących o
fizycznych i medycznych aspektach tego zjawiska można przytoczyć listę źródeł
dotyczących matematycznych i algorytmicznych zagadnień związanych z tematyką
rekonstrukcji danych. Większość publikacji jest napisana w języku angielskim. Ich
szeroka dostępność (także poprzez Internet) pozwoliła autorowi wybrać i opracować
krótki opis stanu obecnego, z którego bezpośrednio wynikają sprecyzowane obszary
badań oraz cele niniejszej pracy.
W książce Principles of Computerized Tomographic Imaging [Błąd: Nie
znaleziono źródła odwołania] autor bardzo przekrojowo opisuje cały proces
obrazowania medycznego z wykorzystaniem tomografu. Książka wydana została w
roku 1988, gdy moc obliczeniowa ówczesnych komputerów była absolutnie
niewystarczająca do rekonstrukcji obrazów o wysokiej rozdzielczości technikami
algebraicznymi na skalę użytkową. Mimo tego faktu, autor w rozdziale 7 szczegółowo
opisuje podstawy działania algorytmów opartych na technikach algebraicznych,
analizuje ich przydatność oraz przedstawia dwie modyfikacje algorytmów – SIRT (ang.
Simultaneous Iterative Reconstruction Technique) oraz SART (Simultaneous Algebraic
Reconstruction Technique).
Dodatkowo, w publikacji przedstawionych jest kilka propozycji uproszczeń
związanych z obliczaniem wartości współczynnika wagowego dla pikseli. Autor
proponuje zastąpienie procedury obliczania dokładnej wartości tych współczynników
procedurą uproszczoną, zwracającą binarny wynik: 1 jeśli promień ma część wspólną z
promieniem i 0 w przeciwnym przypadku. Zaproponowana modyfikacja jest
kompromisem wynikającym z dużej złożoności obliczeniowej algorytmu.
Autor prezentuje wyniki swojej pracy na przykładzie rekonstrukcji niewielkiego
obiektu rozmiarach 128 x 128 pikseli dla 100 projekcji, wykorzystując fantom Shepp’aLogan’a. Wybrany rozmiar obszaru rekonstrukcyjnego jest zrozumiały ze względu na
- 50 -
Bibliografia
możliwości obliczeniowe, jednak uzyskane wyniki są trudne do porównania ze względu
na ich niewielkie rozmiary oraz niewielką ilość wykonanych projekcji. Dodatkowo,
zastosowane uproszczenia nie wpływają pozytywnie na jakość przedstawionych
wyników
Rys. 33 Wynik rekonstrukcji fantomu Shepp’a-Logan’a o rozmiarach 128 x 128 pikseli. Rekonstrukcję
wykonano za pomocą algorytmu SART. Rysunek zaczerpnięty z książki Principles of Computerized
Tomographic Imaging [Błąd: Nie znaleziono źródła odwołania]
Od czasu publikacji książki Principles of Computerized Tomographic Imaging
[Błąd: Nie znaleziono źródła odwołania] oraz artykułu Art.: Mathematics and
Applications [12], techniki algebraiczne zostają porzucone na rzecz technik opartych na
metodzie wstecznej projekcji (ang. FBP – Filtered Back Projection), co potwierdza i
krytykuje Thorsten M.Buzug - autor książki Computed Tomography [Błąd: Nie
znaleziono źródła odwołania], wydanej w roku 2008 w Niemczech przez wydawnictwo
Springer.
Pozycja zawiera szeroki i kompleksowy opis problematyki związanej z
rekonstrukcją algebraiczną. Przedstawione zostają bardzo szczegółowe przykłady
działania metody algebraicznej oraz załączona zostaje uogólniona propozycja
implementacji algorytmu w środowisku MATLAB.
Autor wyraźnie podkreśla, że technika wstecznej projekcji charakteryzuje się
znacznymi artefaktami oraz, że nie dostrzega wyraźnego uzasadnienia faktu dominacji
tej techniki w obszarze rekonstrukcji tomograficznej innego niż aspekt obliczeniowy.
Autor zaznacza, że podejście algebraiczne, przedstawiające proces rekonstrukcji jako
rozwiązywanie złożonego układu równań matematycznych jest bardziej poprawne,
również pod względem dydaktycznym, a także znacznie łatwiejsze do zrozumienia od
technik częstotliwościowych, opartych na transformacji Fouriera. Wyraża jednocześnie
- 51 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
nadzieję, że rozwój komputerów i postępujący wzrost ich możliwości przyczyni się do
spopularyzowania algebraicznych technik rekonstrukcyjnych.
Rys. 34 Wizualizacja niezwykle szczegółowych przykładów przedstawiona w książce Computed
Tomography [Błąd: Nie znaleziono źródła odwołania] autorstwa Thorsten’a Buzug’a
W książce zostają przedstawione również modyfikacje ART. i SIRT, zostaje
przedstawiona zbieżność metody iteracyjnej, dla niewielkiego. Autor poświęca dużo
uwagi również metodą statystycznym przedstawiając je jako równorzędną z ART.
alternatywę dla metody FBP.
Książki Principles of Computerized Tomographic Imaging [Błąd: Nie
znaleziono źródła odwołania] oraz Computed Tomography [Błąd: Nie znaleziono źródła
odwołania]
stanowią
absolutną
bazę
w
zakresie
algebraicznych
metod
rekonstrukcyjnych, dobrze obrazują różnice pomiędzy tymi metodami a algorytmami
opartymi na wstecznej projekcji.
Robert Cierniak w książce Tomografia komputerowa. Budowa urządzeń CT.
Algorytmy rekonstrukcyjne [Błąd: Nie znaleziono źródła odwołania] poświęca krótki
rozdział algebraicznym algorytmom rekonstrukcyjnym.
Jest to publikacja bardzo
wartościowa ze względu na ogólną wiedzę dotyczącą tomografii komputerowej,
przedstawioną w języku polskim, jednak w kontekście metod algebraicznych wnosi
stosunkowo niewiele.
- 52 -
Bibliografia
Oprócz pozycji książkowych dostępne są liczne publikacje naukowe traktujące a
wybranych zagadnieniach i problemach związanych z technikami rekonstrukcji
tomograficznej i mikrotomgraficznej w tym metodach ART. Bardzo interesującą
publikacją jest artykuł, który powstał w wyniku
prac dr Wojciecha Chlewickiego
wykonanych podczas pobytu w University of Patras w Grecji. Tytuł artykułu to Cone
based 3D reconstruction: a fdk - sart comparison for limited number of projections [ 13],
autorzy opisują w nim porównanie metod FBP i ART dla niepełnego zakresu kąta
projekcji. W podsumowaniu artykułu autorzy podkreślają przewagę metody
algebraicznej oraz wykazują mniejszą ilość artefaktów, jednak rekonstrukcja jest
wykonywana dla danych pochodzących z symulatora (a nie danych rzeczywistych).
Podobne badania zostały przedstawione w artykule Algebraic Reconstruction in
CT from Limited Views [14], jednak badano obraz o niewielkich rozmiarach (80 x 80
pikseli) i nie wykonano porównania z algorytmem FBP. Badania zakończone zostały
wnioskami
podkreślającymi
wysoką
dokładność
metody
ART
i
możliwość
zastosowania jej do ograniczonego kąta projekcji.
W publikacji zamieszczonej w periodyku pt. Studies in Computational
Mathematics w roku 2001 [15] autorzy informują o pierwszym zastosowaniu techniki
ART do rekonstrukcji danych pochodzących z tomografii spiralnej. Otrzymane wyniki
są poprawne ale autorzy zapowiadają dalszą pracę związaną z optymalizacją złożonego
algorytmu.
Artykuł pt. Near Real Time Tomographic 3D Reconstruction with the use of the
PC Graphics Accelerator [16] zaprezentowany na konferencji Multisensor Fusion and
Integration for Intelligent Systems opisuje zastosowanie metod algebraicznych do
rekonstrukcji danych w czasie rzeczywistym. Rekonstruowane dane pochodzą ze
obrotowego aparatu rentgenowskiego typu C-arm, który może być wykorzystywany na
sali operacyjnej do badania bieżącego stanu pacjenta w tym także do pozyskania zdjęć
warstwowych podobnych do uzyskiwanych z tomografii komputerowej.. Skaner tego
typu obsługiwany jest ręcznie i wykonuje projekcje w niepełnym kącie obrotu. Ma to
zasadnicze znaczenie dla pacjenta ze względu na procedury ochrony radiologicznej.
Niepełny kąt skanowania pozwala zmniejszyć ilość promieniowania które absorbuje
pacjent, dzięki czemu badanie może być wykonane nawet kilkukrotnie w trakcie jednej
operacji. Autorzy podkreślają, że w takim przypadku zastosowanie algorytmu FBP nie
- 53 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
jest możliwe ze względu na jego ograniczone możliwości rekonstrukcji niepełnego
zestawu projekcji. Zdaniem autorów jedyną metodą rekonstrukcji, która może podołać
temu zadaniu jest ART. lub jego modyfikacja SART. Przedstawione wyniki pochodzą z
rzeczywistego skanera i cechują się dobrą jakością. Zaproponowane rozwiązanie
polegające na wykorzystaniu akceleratora graficznego pozwala uzyskać wyniki
rekonstrukcji w czasie porównywalnym do czasu skanowania obiektu. Artykuł
ograniczony jest jednak tylko do tematu zastosowania skanera C-arm, a przedstawione
w nim oprogramowanie nie jest w żaden sposób dostępne.
Zaproponowano liczne modyfikacje algorytmu ART w celu poprawy jakości
obrazu wynikowego. Tego typu publikacje świadczą wyraźnie o wzroście
zainteresowania algebraicznym podejściem do problematyki rekonstrukcji obrazu [17, 18,
19 20
, ]
Za wyjątkiem pracy Buzug’a żadna z przedstawionych publikacji nie zawiera
szczegółów implementacyjnych, nie są dostępne też źródła powstałych programów.
Uniemożliwia to przeprowadzenie jakichkolwiek badań w zakresie modyfikacji
algorytmów i ich parametrów. Niniejsza praca uzupełnia tę lukę, umożliwiając dalszy
rozwój zaimplementowanych algorytmów, w tym algorytmu ART i badanie tematyki
rekonstrukcji algebraicznej.
- 54 -
Bibliografia
Część badawcza
1.8 Implementacja rekonstrukcji z wykorzystaniem algorytmu
FBP
Podstawowe problemy dotyczące implementacji rekonstrukcji metodą wstecznej
projekcji związane są z interpolacją obracanych obrazów. Funkcja projekcyjna jest
rozsmarowywana wzdłuż linii rozchodzenia się promieniowania rentgenowskiego. Tak
przygotowany obraz jest obracany (zależnie od kąta projekcji) a następnie podlega
interpolacji w celu zapewnienia dobrej jakości obrazu wynikowego. Większość
środowisk programistycznych udostępnia gotowe biblioteki zawierające funkcje
umożliwiające obrót obrazu wraz z zastosowaniem jednego z kilku dostępnych
sposobów interpolacji.
Implementacje wykonano w środowisku Matlab i Microsoft Visual Studio.
1.8.1 Implementacja w środowisku MATLAB
Środowisko MATLAB udostępnia szereg funkcji matematycznych związanych z
procedurą transformacji Radona oraz odwrotnej transformacji Radona. Dostarczone
narzędzia w zupełności wystarczają do przeprowadzenia procesu rekonstrukcji.
Autor zaprojektował własny skrypt umożliwiający rekonstrukcję obrazu,
poszerzając go o możliwość włączenia lub wyłączenia filtracji sinogramu.
Podstawową część rekonstrukcji realizuje fragment funkcji przedstawiony
poniżej.
% zdefiniuj macierz reprezentującą obraz wejściowy
IR = zeros(ImageSize);
% dla każdej wartości projekcji zawartej w macierzy theta
for t = 1:length(theta);
% utwórz macierz roboczą
TMP = zeros(length(xp));
% odczytaj odpowiedni wiersz sinogramu
- 55 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
SinogramRow = R(:,t);
% dla każdego wiersza obrazu
for y = 1:length(ImageSize)
% rozsmaruj projekcję
end
TMP(y,:) = SinogramRow';
% obróć rozsmarowaną projekcję I dodaj do obrazu wynikowego
IR = IR + (imrotate(TMP, theta(t), 'nearest', 'crop') /
length(theta));
end
Niemal identyczny rezultat (w zależności od przekazanych parametrów) można
uzyskać stosując funkcję iradon. Minimalna ilość parametrów jaką przyjmuje ta funkcja
to 2 (macierz zawierającą sinogram oraz wartości kątów projekcji). W ramach
parametrów opcjonalnych można określić jeden z kilku dostępnych filtrów oraz
sposobów interpolacji. Szczegółowo możliwości funkcji iradon opisuje pomoc
programu MATLAB[Błąd: Nie znaleziono źródła odwołania]
Alternatywnym sposobem jest oprogramowanie obrotu samodzielnie z
wykorzystaniem transformacji trygonometrycznych.
1.8.2 Implementacja C#
W środowisku C# również istnieje możliwość użycia gotowych funkcji
wykonujących obrót i interpolację. Dodatkowo autor samodzielnie zaimplementował
funkcję wykonującą obrót i interpolacje metodą najbliższego sąsiedztwa. Kod źródłowy
realizujący obrót z interpolacją znajduje się poniżej:
// Obliczenie połowy wysokości obrazu
// w celu przyspieszenia obliczeń
int h05 = height / 2;
//Dla każdego wiersza
for (int i = 0; i < height; i++)
{
// Dla każdego piksela w wierszu
for (int j = 0; j < height; j++)
{
// Wylicz nową współrzędną I
int newI = (int)Math.Round((i-h05) * Math.Cos(angle)
- (j-h05) * Math.Sin(angle)) + h05;
// Wylicz nową współrzędną J
int newJ = (int)Math.Round((i-h05) * Math.Sin(angle)
+ (j-h05) * Math.Cos(angle)) + h05;
// Jeśli współrzędne nie wykraczają poza obraz
- 56 -
Bibliografia
if (newI > 0 && newI < height && newJ > 0 && newJ < height)
{
}
// dodaj je do obrazu wynikowego
rotatedImage[newI, newJ] = image[i, j];
}
}
Pozostała część algorytmu działa w sposób identyczny z przedstawionym w
rozdziale 1.8.1
Dodatkowo zaimplementowano funkce pomocnicze dotyczące konwersji tablic
do bitmapy, rozsmarowania sinogramu, skalowania i dodawania obrazów, filtracji
sinogramu czy transformaty fouriera.
Poniżej zaprezentowano kod funkcji odpowiedzialnej za wykonanie filtracji z
użyciem filtra medianowego:
// Dla każdego wiersza
for (int i = 2; i < height - 2; i++)
{
// dla każdego piksela w wierszu
for (int j = 2; j < height - 2; j++)
{
// Utwórz listę i dodaj do niej piksele sąsiadujące
List<double> medianList = new List<double>();
medianList.Add(image[i - 1, j - 1]);
medianList.Add(image[i, j - 1]);
medianList.Add(image[i + 1, j - 1]);
medianList.Add(image[i - 1, j]);
medianList.Add(image[i, j]);
medianList.Add(image[i + 1, j]);
medianList.Add(image[i - 1, j + 1]);
medianList.Add(image[i, j + 1]);
medianList.Add(image[i + 1, j + 1]);
// Posortuj listę
medianList.Sort();
}
// Pobierz środkowy element
outputImage[i, j] = medianList[5];
}
- 57 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
1.9 Implementacja rekonstrukcji z wykorzystaniem algorytmu
ART.
Algorytm
rekonstrukcji
algebraicznej
(ang.
Algebraic
Reconstruction
Technique) różni się zasadniczo od przedstawionego wcześniej algorytmu wstecznej
projekcji. Dane wejściowe (a także proces akwizycji obrazu) nie ulegają zmianie, różny
jest natomiast proces rekonstrukcji obrazu.
Pierwszy etap działania algorytmu polega na obliczeniu pola przekroju każdego
promienia z każdym pikselem obrazu. Biorąc pod uwagę ilość wszystkich promieni,
pikseli oraz projekcji oraz kształt przekrojów (głównie wielokąty) jest to bardzo
rozbudowany proces obliczeniowy.
Kolejny etap polega na obliczeniu wartości funkcji projekcyjnej dla bieżącej
wartości obrazu, porównaniu jej z rzeczywistą wartością tej funkcji (uzyskaną w
procesie skanowania), wyliczeniu współczynnika korekcji a następnie zastosowaniu
korekcji dla każdego piksela obrazu, zależnie od wielkości pola przecięcia z
promieniem.
Opisane powyżej etapy powtarza się dla każdej wartości kąta projekcji, dzięki
czemu każdy kolejny krok algorytmu pozwala uzyskać lepsze przybliżenie wyniku. Po
wykonaniu algorytmu dla pełnego zbioru projekcji można przeprowadzić kolejną
iterację, zwiększając zbieżność pomiędzy obrazem rekonstruowanym a rzeczywistym.
Iteracje można wykonywać tak długo aż uzyskana zbieżność uznana zostanie za
wystarczającą. Problem algebraiczny
Podstawowym wyzwaniem rekonstrukcji algebraicznej jest wydajne obliczenie
pola powierzchni przecięcia zadanego promienia z pikselem (lub z vokselem w
przypadku geometrii 3D. Należy pamiętać, że w przypadku tej metody rekonstrukcyjnej
przyjmujemy, że każdy promień ma określone wymiary (przeciwnie niż w metodzie
wstecznej projekcji.
Choć poczynione założenie stanowi pewne wyzwanie algebraiczne i
obliczeniowe, daje ono istotną korzyść w postaci uniezależnienia dalszej części
rekonstrukcji od geometrii układu projekcyjnego.
- 58 -
Bibliografia
Pole powierzchni przecięcia promienia z pikselem służy następnie jako
współczynnik wagowy przy dalszych obliczeniach. Autor zaproponował dwie metody
obliczania tych współczynników.
Rys. 35 Przedstawienie różnych ułożeń promień-piksel wraz z odpowiadającymi im wartościami
współczynnika wagowego. Współczynnik wagowy wyraża stosunek pola powierzchni przecięcia do
całkowitego pola powierzchni piksela.
1.9.1 Metoda wyznaczania współczynników
Z przedstawionych na rysunku Rys. 35] przykładów możemy wnioskować, że
pole przecięcia zawsze przyjmuje kształt wielokąta wypukłego. Może być ono
trójkątem, czworokątem, pięciokątem lub sześciokątem. Figura ta wyznaczana jest
przez punkty przecięcia brzegów promienia z brzegami piksela oraz przez narożniki
piksela. Współrzędne narożników piksela są znane natomiast współrzędne punktów
przecięcia brzegów promienia i brzegów piksela stanowią niewiadomą, którą należy
obliczyć. Punktów takich może być od 0 do 4.
- 59 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Przyjmijmy, że współrzędne wierzchołków piksela to (x1,y1), (x1,y2), (x2,y1),
(x2,y2) oraz równania prostych wyznaczających brzegi promienia to funkcje f1(x) i
f2(x).
Wykonują kilka obliczeń możemy wyznaczyć 8 hipotetycznych punktów
przecięcia, które następnie należy zweryfikować pod kątem przynależności do brzegu
piksela.
Interesujące nas punkty to:
•
•
•
•
•
•
•
•
x1,f1(x1)
x2,f1(x2)
f1-1(y1),y1
f1-1(y2),y2
x1,f2(x1)
x2,f2(x2)
f2-1(y1),y1
f2-1(y2),y2
Funkcje f1 i f2 to równania normalne prostej w kartezjańskim układzie
współrzędnych, gdzie f1 odpowiada jednemu a f2 drugiemu brzegowi piksela.
Równanie normalne prostej przedstawia poniższy wzór
Równanie odwrotne po przekształceniu ma postać:
gdzie w obu równaniach α jest kątem projekcji (w niektórych opracowaniach
oznaczanym także jako θ) a d jest odległością prostej od środka układu współrzędnych.
Wartość opisana symbolem d może być rozumiana inaczej jako odległość brzegu
promienia od środka układu współrzędnych.
Proste stanowiące brzegi piksela są równoległe zatem Funkcje f1 i f2 różnią się
tylko wartością d, która zawsze odpowiada odległości brzegu promienia od początku
układu współrzędnych.
- 60 -
Bibliografia
Rys 36. Wyznaczanie pola przecięcia promienia nr 4 i Piela nr 1. Pole zostanie obliczone na podstawie
wielokąta złożonego z dwóch wierzchołków piksela oraz punktów h3, v3, h2, v2.
Algorytm obliczania współczynników wagowych można zatem przedstawić
następująco:
1. Dla każdego piksela o znanych współrzędnych {(x1,y1), (x1,y2), (x2,y1),
(x2,y2)} oraz dla każdej pary prostych f1 i f2 wyznaczających brzegi
zadanego promienia oblicz współrzędne następujących punktów:
•
x1,f1(x1)
•
x2,f1(x2)
•
f1-1(y1),y1
•
f1-1(y2),y2
•
x1,f2(x1)
•
x2,f2(x2)
•
f2-1(y1),y1
•
f2-1(y2),y2
2. Zweryfikuj każdy z obliczonych punktów pod kątem przynależności do
brzegu piksela, sprawdzając czy współrzędne punktu zawierają się w
- 61 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
przedziałach <x1,x2>, <y1,y2>. Odrzuć punkty nie zawierające się w
3.
4.
5.
6.
tym przedziale.
Dodaj do zbioru punkty będące narożnikami piksela
Uszereguj punkty wg współrzędnych
Oblicz pole wielokąta rozpiętego na uszeregowanych punktach
Podziel uzyskaną wartość przez pole powierzchni piksela
Kroki 5 i 6 wykonano z wykorzystaniem gotowych funkcji programu MATLAB.
1.9.2 Alternatywna metoda wyznaczania współczynników
Podstawową zaletą proponowanej niżej metody alternatywnej jest pełna
niezależność od środowiska MATLAB. Dodatkowo nie są wykonywane żadne
„zbędne” kroki obliczeniowe, co jest zaletą w stosunku do wcześniejszej metody gdzie
część uprzednio obliczonych punktów była odrzucana).
Podstawowym założeniem jest przyjęta zasada, że kąt α oraz długość wektora x
są wystarczającymi danymi do obliczenia pola przecięcia. Jest tak w istocie – znając te
wartości możemy w prosty sposób określić jaką figurą geometryczną będzie szukany
przekrój. Dysponując taką informacją możemy podzielić powierzchnię przekroju na
zestaw trójkątów lub trójkątów i prostokąta. W każdej z tych figur wystąpi z pewnością
kąt wewnętrzny o wartości α lub 90 – α. Zależność ta wynika z zasady przystawania
kątów.
Dodatkowo,
znając
długość
wektora
x
i
wykorzystując
funkcje
trygonometryczne możemy obliczyć długość co najmniej jednego z boków każdego z
trójkątów a zatem także jego pole.
Długość wektora x wyliczamy mnożąc odległość między punktem przecięcia
brzegu promienia i brzegu piksela a narożnikiem piksela przez wartość sin α. Następnie
na podstawie otrzymanej długości rozstrzygamy z jakim przypadkiem mamy do
czynienia (patrz rys Rys. 35]) i w zależności od przypadku obliczamy pole.
W istocie definiujemy więc funkcję
. Funkcja ta jest określona
przedziałami zależnymi od przypadku (dla pola przekroju w kształcie trójkąta,
czworokąta, pięciokąta lub sześciokąta)
- 62 -
Bibliografia
Rys. 37 Sześciokątne pole przekroju podzielone na trójkąty i prostokąt. Łatwo jest zauważyć, że
znajomość długości wektora x oraz kąta α jest wystarczająca do obliczenia pola powierzchni
przedstawionych figur.
1.9.3 Implementacja w środowisku MATLAB
Algorytm przedstawiony w poprzednich rozdziałach można podzielić na dwie
części: związaną ze znalezieniem pola przekroju piksela i promienia oraz związaną z
obliczeniem projekcji i korekcją obrazu.
Zaimplementowane zostały odpowiednio dwie funkcje:
function [ AREA ] = area(j, theta, i, imageSize, N)
oraz:
function [ F ] = buzugArt(
directory,
ImageSize,
angleShift,
raysCount,
F,
filename
)
Funkcja area zwraca współczynnik przecięcia piksela j z promieniem i w
projekcji pod kątem theta (wyrażonym w radianach). Piksele numerowane są
- 63 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
kolejno, począwszy od lewego dolnego narożnika obrazu. Promienie numerowane są
kolejno dla każdej projekcji. Parametry imageSize oraz N określają kolejno rozmiar
obrazu oraz ilość detektorów (lub liczbę promieni).
Funkcja area ustala wszystkie punkty wchodzące w skład wielokąta
stanowiącego przecięcie piksela i promienia, zgodnie z opisem w rozdziale 1.9.1 i
oblicza pole wielokąta. Punkty przechowywane są w macierzy D.
Pierwotnie wykorzystano gotowe funkcje convhull oraz polyarea, których
zadaniem było uszeregowanie wierzchołków wielokąta oraz obliczenie jego
powierzchni.
Ostatecznie
funkcje
zostały
zastąpione
bardziej
wydajnymi
odpowiednikami, dostosowanymi do specyfiki obliczeń.
Obliczenie pola sprowadza się do obliczenia pola poszczególnych trójkątów
składających się na wielokąt i jest realizowane poprzez następujący fragment kodu:
AREA = 0;
% wyznacz punkt początkowy
p1x = D(1,1);
p1y = D(1,2);
% dla pozostałych punktów
For i = 1:size(D,1)-2
p2x = D(1+i,1);
p2y = D(1+i,2);
p3x = D(2+i,1);
p3y = D(2+i,2);
% Oblicz pole kolejnego trójkąta i dodaj do sumy
End
AREA = AREA + 1/2 * abs(
-p1y*p2x + p1x*p2y + p1y*p3x
- p2y*p3x - p1x*p3y + p2x*p3y
);
Obliczenie wartości projekcji oraz korekcji możliwe było do zrealizowania przy
pomocy jednej linii kodu. Wynika to z faktu, że w środowisku MATLAB możliwe jest
zastosowanie standardowych operatorów do całych macierzy. Wyklucza to konieczność
stosowania rozbudowanych struktur kontrolnych i pętli.
Macierz W zawiera obliczone wcześniej współczynniki przecięcia dla bieżącej
projekcji oraz promienia i i piksela n. Operator : pozwala wybrać cały wiersz lub całą
kolumnę z macierzy. Macierz F reprezentuje rekonstruowany obraz. W macierzy R
- 64 -
Bibliografia
przechowywany jest sinogram reprezentujący funkcję projekcyjną. Równanie opisane
zostało również w książce „Computed Tomography” [Błąd: Nie znaleziono źródła
odwołania]
% dla każdego promienia
For i = 1:raysCount
% oblicz projekcję i korekcję
F =
F - (
(
W(i, :) * F
- R(sinogramShift + i ,currentAngle)
)
/
End
W(i, :) * W(i, :)' * W(i, :)'
);
1.9.4 Implementacja c#
W przypadku implementacji w języku c# funkcja area, wcześniej
zaimplementowana w Matlab, nie zmienia znacząco swojego kształtu (punkty wielokąta
przechowywane są w kolekcji E:
AREA = 0;
for (int i = 0; i <= E.Count - 3; i++)
{
AREA = (float) (
AREA + 0.5F * Math.Abs(
-E[0].Y * E[1 + i].X
+ E[0].X * E[1 + i].Y
+ E[0].Y * E[2 + i].X
- E[1 + i].Y * E[2 + i].X
- E[0].X * E[2 + i].Y
+ E[1 + i].X * E[2 + i].Y
)
);
}
Postać fragmentu kodu odpowiedzialnego za obliczenie projekcji i korekcji
ulega znaczącej zmianie – rozbiciu na dwie instrukcje foreach. Funkcja pomocnicza
GetCrossingPixels zwraca kolekcję CrossingPixels, zawierającą wszystkie
piksele obrazu dla których funkcja przecięcia ma szanse zwrócić wartość niezerową.
Pozwala to na znaczne przyspieszenie obliczeń.
- 65 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Funkcje areaPara i areaFan zwracają dokładną wartość pola przecięcia.
Tablica F reprezentuje obraz wynikowy a zmienna currentSinogramValue
wartość funkcji projekcyjnej dla rozważanego promienia.
// Dla każdego piksela
foreach (int pixel in CrossingPixels)
{
// Jeśli wybrano algorytm rekonstrukcji równoległej
if (listBoxGeometryClass.SelectedIndex == 0)
{
// Oblicz współczynnik przecięcia
W[pixel] = areaPara(
pixel, projInRadians, ray, projImgW, projRaysCount
);
}
// Jeśli wybrano algorytm rekonstrukcj wachlarzowej
else
{
// Oblicz współczynnik przecięcia
W[pixel] = areaFan(
pixel,
projInRadians,
ray,
projImgW,
projRaysCount,
(float)numFOD.Value,
(float)numFDD.Value,
(float)numPixelSize.Value
);
}
// Przygotuj sumę kwadratów
wSqrSum += W[pixel] * W[pixel];
// Przygotuj sumę W * F
WxF += W[pixel] * F[pixel];
}
// Oblicz korekcję
Correction = (float)((WxF - currentSinogramValue) / wSqrSum);
// Dla każdego piksela
foreach (int pixel in CrossingPixels)
{
// Zastosuj korekcję
F[pixel] -= (Correction * W[pixel]);
}
1.9.5 Porównanie środowisk MATLAB i Microsoft Visual Studio
Zaimplementowanie algorytmu tak złożonego pod względem obliczeniowym
pozwoliło porównać wydajność wybranych przez autora środowisk programistycznych
oraz ich użyteczność w zakresie rozwiązywania problemów rekonstrukcyjnych.
- 66 -
Bibliografia
Środowisko MATLAB okazało się bardzo wygodnym narzędziem w zakresie
projektowania algorytmu oraz szybkiej wizualizacji wyników pośrednich. Zestaw
gotowych funkcji umożliwiał łatwe i szybkie zweryfikowanie obliczonych danych na
każdym z etapów projektowania i testowania. Duże ułatwienie stanowiła rozbudowana
dokumentacja użytkowa programu, obejmujące nie tylko kwestie techniczne i
programistyczne ale także szeroki zakres zagadnień matematycznych. Zdecydowanym
utrudnieniem był skąpy interfejs użytkownika, brak możliwości automatycznego
uzupełniania i porządkowania składni.
Środowisko Microsoft Visual Studio charakteryzowało się znacznie większymi
możliwościami w zakresie organizowania aplikacji oraz interfejsu użytkownika.
Poruszanie się w strukturze obiektów było znacznie bardziej wygodne i intuicyjne.
Skompilowany kod charakteryzował się krótszym czasem wykonywania obliczeń,
dodatkowo umożliwiał wykonanie na dowolnym komputerze wyposażonym w .NET
Framework.
Zdaniem autora, zdecydowanie najlepszym rozwiązaniem było projektowanie i
wstępne
testowanie
algorytmów
w
środowisku
MATLAB
a
następnie
ich
implementacja i testowanie w Microsoft Visual Studio. Taka organizacja pracy
pozwalała na dostarczenie dobrej jakości programu, który może być obsługiwany przez
każdego użytkownika.
1.10 Wyniki rekonstrukcji
Do porównania wyników rekonstrukcji wybrano dwa zestawy danych:
a) Projekcje w geometrii równoległej pochodzące z symulatora opracowanego
w University of Patras w Grecji przez dr Kristinę Bliznakovą. Krok obrotu
wirtualnej próbki wynosił 2°.
b) Projekcje w geometrii stożkowej pochodzące z Laboratorio di Tecnologia
Medica z Bolonii. Skanowanym obiektem był wycinek szyjki kości udowej.
Rekonstruowano 490 linię przekroju, której projekcje odpowiadały geometrii
- 67 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
wachlarzowej. Dane są dostępne na otwartej stronie internetowej [21]. Krok
obrotu próbki skanowanej mikrotomograficznie wynosił 0.9°
1.10.1 Rekonstrukcja zestawu danych „A” – geometria równoległa
b)
a)
Rys. 38 Rysunek przedstawia wyniki rekonstrukcji rozszerzonego fantomu Shepp’a-Logan’a opisanego w
rozdziale 1.2.1, a – metodą FBP, b – metodą ART. Rekonstrukcja z projekcji wykonanych co 2 stopnie w
zakresie od 0° - 180°
Rys. 39 Wybrany obszar zainteresowania, zawierający obiekty o różnej gęstości.
- 68 -
Bibliografia
a)
b)
Rys. 40 Wynik rekonstrukcji a – FBP, b – ART. Wybrany obszar o rozmiarach 190 x 190 px.
Rys. 41 Histogramy wyników rekonstrukcji. FBP – po lewej i ART. – po prawej.
Wyznaczono profil pionowy (x = 110px) oraz poziomy (y = 92px). Oraz
zmierzono odległość zaznaczoną na rysunku. W przypadku FBP wynosiła ona 171 px,
w przypadku ART 169 px.
- 69 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 42 Profile obrazów. FBP – po lewej i ART. - po prawej. Profil poziomy znajduje się w środkowym
rzędzie, profil pionowy – na dole.
Rys. 43 Odległość zmierzona wzdłuż profilu pionowego.
- 70 -
Bibliografia
1.10.2 Rekonstrukcja zestawu danych „B” – geometria wachlarzowa
a)
b)
c)
Rys. 44 Rysunek przedstawia zestawienie wyników rekonstrukcji wycinka szyjki kości udowej.
A) rekonstrukcja algorytmem FBP, rekonstrukcja algorytmem ART., c) wynik rekonstrukcji oryginalnym
oprogramowaniem skanera SkyScan [Błąd: Nie znaleziono źródła odwołania]
Do porównania wycinków wybrano obszar środkowy rekonstruowanego obrazu
o rozmiarach 230 x 230 pikseli. Obrazy zostały odpowiednio przygotowane i przycięte
tak aby wybrany wycinek przedstawiał zawsze ten sam fragment obrazu.
Rys. 45 Wybrany obszar obrazu
Wybrany obszar obrazu jest reprezentatywny, zawiera niezbędne cechy
porównawcze – fragment kości korowej i fragment kości gąbczastej.
- 71 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Wynik
rekonstrukcji
algorytmem
FBP
zaimplementowanym przez autora (opis w
rozdziale
1.8.
Wycinek
wybrany
do
porównania – rozmiar 230 x 230 px.
Wynik
rekonstrukcji
algorytmem
FBP
zaimplementowanym przez autora (opis w
rozdziale
1.9.
Wycinek
wybrany
do
porównania – rozmiar 230 x 230 px.
Wynik
rekonstrukcji
oprogramowaniem
skanera
oryginalnym
SkyScan
[2].
Wycinek wybrany do porównania – rozmiar
230 x 230 px.
[Tabela 2] Zestawienie wyników rekonstrukcji w wybranym obszarze. Zostały przedstawione (od góry):
wynik rekonstrukcji algorytmem FBP, wynik rekonstrukcji algorytmem FBP, wynik rekonstrukcji
pochodzący z oprogramowania komercyjnego.
- 72 -
Bibliografia
Rys. 46 Zestawienie histogramów uzyskanych obrazów. A) rekonstrukcja algorytmem FBP,
rekonstrukcja algorytmem ART., c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2]
- 73 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 47 Profil obrazów wzdłuż poziomej linii profilu (y = 70px). A) rekonstrukcja algorytmem FBP,
rekonstrukcja algorytmem ART., c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2]
- 74 -
Bibliografia
Rys. 48 Profil obrazów wzdłuż pionowej linii profilu (x = 125px). A) rekonstrukcja algorytmem FBP,
rekonstrukcja algorytmem ART., c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2]
1.11 Dyskusja wyników
Zarówno w przypadku danych pochodzących z symulatora jak i z rzeczywistego
mikrotomografu uzyskano wyniki zgodne z oczekiwanymi, przedstawiające właściwy
przekrój skanowanego obiektu.
1.11.1 Rekonstrukcja zestawu danych „A” – wirtualnego fantomu –
geometria równoległa
Wyniki rekonstrukcji są zbieżne wizualnie z opisem rekonstruowanego fantomu
(rozdział 1.2.1). Na obu obrazach można zauważyć artefakty wynikające z przyjętego
kroku obrotu (co 2°), jednak w przypadku algorytmu rekonstrukcyjnego ART artefakty
są znacznie mniejsze a obraz dużo bardziej wyraźny – potwierdzają to również profile
- 75 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
obrazu, które prawidłowo odzwierciedlają morfologię obiektu. Przedstawione
histogramy różnią się w niewielkim stopniu.
1.11.2 Rekonstrukcja zestawu danych „B” – próbki szyjki kości udowej –
geometria wachlarzowa
Wyniki rekonstrukcji są zbieżne wizualnie z wynikiem uzyskanym z
oprogramowania komercyjnego, drobne różnice związane z szumem tła są łatwe do
zredukowania.
Porównując histogramy dla poszczególnych wyników można zaobserwować, że
algorytm FBP zrekonstruował lepiej obiekty o większej gęstości natomiast algorytm
ART był bardziej czuły na obiekty mniej gęste. W przypadku rekonstrukcji tkanki
kostnej algorytmem FBP lepiej zostały zrekonstruowane fragmenty struktury kostnej
natomiast algorytm ART. Bardziej uwydatnił strukturę międzykostną. Wartość
wyznaczone dla profilu obrazów (tak pionowym jak i poziomym) korespondują z
morfologią badanego obiektu. Na rysunku Rys. 49] zaznaczono odległość pomiędzy
punktami A i B. Odległość została zmierzona dla wszystkich trzech obrazów i wyrażona
w pikselach wynosi odpowiednio: 43 dla algorytmu FBP, 41 dla algorytmu ART i 46 w
wyniku uzyskanym z oprogramowania komercyjnego.
Rys. 49 Zaznaczony odcinek obszaru rekonstrukcyjnego, na podstawie którego dokonano pomiaru
odległości w profilach. Profile zostały wygenerowane z użyciem środowiska MATLAB odległości
- 76 -
Bibliografia
zostały odczytane z profili za pomocą narzędzi dostępnych w tym środowisku. Odległość mierzona była
pomiędzy punktami profilu odpowiadającym punktom A i B zaznaczonym na powyższym obrazie.
- 77 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Możliwości rozwoju pracy
Zaimplementowane algorytmy stanowią wyjściową formę, która może być
podstawą
dalszych
modyfikacji.
Powstała
aplikacja
może
zostać
dowolnie
zmodyfikowana i rozbudowana (w odróżnieniu od aplikacji komercyjnych, których
źródła nie są dostępne ze względu na tajemnicę handlową i ochronę własności
intelektualnej).
Jednym z kolejnych kroków mogłoby być rozszerzenie algorytmu o możliwość
rekonstrukcji wiązki stożkowej lub rekonstrukcję projekcji uzyskiwanych z tomografii
spiralnej.
Interesującym zagadnieniem wydaje się także zbadanie zależności pomiędzy
ilością danych wejściowych (ilością projekcji) a jakością obrazu wynikowego.
Zależność ta może być badana zarówno w przypadku zestawów danych zawierających
projekcje z pełnego zakresu obrotu (360°) jak i z zakresu niepełnego (np. od -40° - 40°).
Niepełny zakres kąta projekcji wykorzystywany jest w technice tomosyntezy opisanej w
rozdziale 1.1.5.
Algorytm ART Może zostać rozbudowany do wersji SART oraz SIRT,
ponieważ uzyskane wyniki mogą w wybranych przypadkach być dokładniejsze od tych
otrzymanych z metody ART..
Wiele możliwości rozbudowy przedstawia również sam kod źródłowy aplikacji.
Ciekawym rozwiązaniem byłaby implementacja programu w wersji wielowątkowej lub
wykorzystującej procesory nowoczesnych kart graficznych. Pozwoliłoby to na znaczne
przyspieszenie obliczeń co pozwoliłoby na zwiększenie dynamiki przeprowadzanych
badań.
Dodatkowe przyspieszenie działania algorytmów można by uzyskać poprzez
implementację części funkcji w języku c++ i skompilowanie ich do postaci biblioteki,
która mogłaby być wykorzystywana z poziomu Microsoft Visual Studio .
- 78 -
Bibliografia
Wnioski i podsumowanie
Przyjęty przez autora cel pracy został zrealizowany. Wykonane oprogramowanie
dostarcza prawidłowych wyników będących efektem rekonstrukcji tomograficznej
wykonanej z zastosowaniem algorytmów, które były przedmiotem badan. Jednak aby
uzyskać najwyższą jakość wyników konieczna jest współpraca z producentem aparatury
(tomografu, mikrotomografu) lub uzyskanie szczegółowej dokumentacji technicznej i
projektowej w zakresie poznania dokładnych wartości wszystkich parametrów
urządzenia oraz ich interpretacji. Posiadanie takich danych mogłoby umożliwić dalsze
rozwijanie algorytmu ART i badanie jego skuteczności w kolejnych iteracjach.
Zbadane algorytmy przedstawiają zbliżone możliwości rekonstrukcji, jednak
algorytm ART cechuje się znacznie większym czasem wykonywania obliczeń. Wynik
działania algorytmu ART cechuje się mniejszą ilością artefaktów, zwłaszcza w
przypadku rekonstrukcji z mniejszej ilości projekcji, obraz jest bardziej „wygładzony”
ze względu na zastosowanie korekcji.
Bardzo pomocna byłaby możliwość swobodnego dostępu do aparatury
tomograficznej podczas implementacji algorytmów. Umożliwiłaby ona przygotowanie
testowych zestawów danych, nieprzydatnych w badaniach preparatów ale niezwykle
cennych w procesie kalibracji i testowania algorytmów. Brak takich zestawów danych
w odczuwalny sposób przełożył się na wydłużenie okresu czasu niezbędnego do
powstania tej pracy.
Być może osiągnięcia informatyki związane ze znacznym zwiększeniem mocy
obliczeniowej komputerów oraz coraz większa popularność wielordzeniowych kart
graficznych pozwalających na wydajniejsze rozwiązywanie problemów numerycznych
spowoduje ponowne zainteresowanie algebraicznymi technikami rekonstrukcyjnymi,
zarówno
w
przypadku
mikrotomografii
jak
komputerowej.
- 79 -
i
konwencjonalnej
tomografii
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Spis tabel
Tabela 1. Matematyczny opis rozszerzonej wersji fantomu
skonstruowanego przez dra Zachariasa Kamarianakisa w University
of Patras..........................................................................................................
[Tabela 2] Zestawienie wyników rekonstrukcji w wybranym
obszarze. Zostały przedstawione (od góry): wynik rekonstrukcji
algorytmem FBP, wynik rekonstrukcji algorytmem FBP, wynik
rekonstrukcji pochodzący z oprogramowania komercyjnego..................
- 80 -
Bibliografia
Spis rysunków
Rys. 1 Tomograf komputerowy firmy Philips. Widoczna jest gantra
oraz przesuwny stół – elementy odpowiedzialne za akwizycję
obrazu. Komputer dokonujący rekonstrukcji wraz z systemem
służącym do wizualizacji zrekonstruowanych obrazów znajduje się
zazwyczaj w osobnym pomieszczeniu............................................................
Rys. 2 Schemat generatora promieniowania rentgenowskiego.
Elektrony opuszczają katodę i są rozpędzane w polu elektrycznym,
następnie uderzają w wirującą anodę generując promieniowanie.
Rysunek na podstawie [].................................................................................
Rys. 3 Przykłady różnych geometrii układów projekcyjnych...................
Rys. 4 Projekcja badanego obiektu na detektor prostokątny.
Poszczególne elementy macierzy detektora pozwalają odczytać
wartość natężenia promieniowania w danym punkcie. Odczytane
wartości zapisywane są do plików a następnie przekazywane do
algorytmu odpowiedzialnego za rekonstrukcję obiektu............................
Rys. 5 Tomograf pierwszej generacji..........................................................
Rys. 6 Tomograf drugiej generacji..............................................................
Rys. 7 Tomograf trzeciej generacji..............................................................
Rys. 8 Tomograf czwartej generacji............................................................
Rys. 9 Spiralna tomografia komputerowa..................................................
- 81 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 10 Powyższy rysunek zaczerpnięty został ze książki Computed
Tomography[], rozdział 3.10 strona 95. Ilustruje on w doskonały
sposób różnicę w rozdzielczości przestrzennej (dokładności)
pomiędzy skanerami microCT (rysunek a i c) i standardowymi CT
(rysunek b i d). Skanowanym obiektem był ząb neandertalczyka,
żyjącego ok. 200 000 lat temu. Obrazy czarnobiałe ukazują przekrój
przez ząb, obrazy w kolorze przedstawiają wynik rekonstrukcji
trójwymiarowej całego obiektu....................................................................
Rys. 11 a) Zrekonstruowany obiekt – widok z góry. Oś źródłodetektor przebiega poziomo; b) Widok w płaszczyźnie prostopadłej
do osi źródło-detektor. Widoczne są artefakty związane z
ograniczonym kątem projekcji, jednak obiekty sferyczne zachowują
dobrą rozróżnialność; c) Widok z boku. Oś źródło-detektor
przebiega poziomo.........................................................................................
Rys. 12 Układ projekcyjny oraz profil uzyskany po prześwietleniu
badanego obiektu wiązką równoległą promieniowania
rentgenowskiego............................................................................................
Rys. 13 - a) obraz wejściowy przedstawiający punkt; b) sinogram
uzyskany z obrazu wejściowego a; c) odcinek o grubości 5px; d)
sinogram uzyskany z obrazu c; e) fantom Shepp'a-Logan'a; f)
sinogram uzyskany z obrazu e. Mimo większego stopnia
skomplikowania w dalszym ciągu możemy interpretować go jako
geometryczne złożenie sinusoid o różnych parametrach. Wszystkie
obliczenia i ich wizualizacje wykonane zostały w środowisku
MATLAB.......................................................................................................
- 82 -
Bibliografia
Rys. 14 Shepp-Logan Phantom zaimplementowany w środowisku
MATLAB. Funkcja phantom(n) umożliwia wygenerowanie fantomu
o rozmiarze n x n pikseli, co stanowi duże ułatwienie w testowaniu
algorytmów.....................................................................................................
Rys. 15 Shepp-Logan Phantom. Opis matematyczny zamieszczony w
książce Principles of Computerized Tomographic Imaging . Podane
wartości oznaczają gęstość obiektu. Obiekty ułożone są
uproszczonym modelem czaszki człowieka. Elipsy a i b
przedstawiają kości czaszki, e – móżdżek, h, j oraz i symulują
zmiany nowotworowe. Porównując wynik rekonstrukcji z fantomem
możemy określić jakość algorytmu rekonstrukcyjnego, występujące
artefakty oraz dokładność z jaką odzwierciedla obiekty o niewielkim
rozmiarze lub niewielkiej gęstości................................................................
Rys. 16 rozszerzony fantom Shepp’a-Logan’a, zaprojektowany na
University of Patras, przez dra Zachariasa Kamarianakisa. Rysunek
wykonany został przez autora phantomu...................................................
Rys. 17 Rozszerzony fantom Shepp’a-Logan’a – projekcja
równoległa „obserwowana” na detektorze. Powyższy obraz
przedstawia symulowany odczyt z detektora podczas projekcji
całego fantomu (3D). Widoczne są poszczególne obiekty składowe,
ich „jasność” jest proporcjonalna do gęstości ujętej w tabeli [Tabela
1]......................................................................................................................
Rys. 18 Przedstawienie problemu pomiaru projekcji jako operacji
całkowania liniowego....................................................................................
Rys. 19 Proces odwrotnej transformacji Radona. Kolejno, dla
każdego kąta θ funkcja projekcji p(t, θ) zostaje rozsmarowana
- 83 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
wzdłuż linii po których odbywało się całkowanie. Każdemu
punktowi znajdującemu się na linii x·cos θ + y·sin θ = t przypisana
zostaje ta sama wartość, równa p(t, θ) . Wykonanie transformacji
odwrotnej dla pojedynczej projekcji nie zwraca obrazu źródłowego
ale już transformacja w zakresie wszystkich wartości θ pozwala na
uzyskanie obrazu bardzo zbliżonego do wejściowego. Otrzymujemy
w ten sposób funkcję g(x ,y), która jest aproksymacją funkcji f(x ,y)
.........................................................................................................................
Rys. 20 Fragment fantomu Shepp’a-Logana z zastosowaniem
różnego rodzaju interpolacji. Rysunek a – interpolacja ‘nearestneighbor’, b – ‘spline interpolation’, c – obraz oryginalny. Można
zaobserwować różne rodzaje artefaktów w zależności od
zastosowanego rodzaju interpolacji.............................................................
Rys. 21 Artefakt spowodowany twardnieniem wiązki. Rysunek a
ilustruje rzeczywisty przekrój obiektu wraz z profilem. Rysunek b
przedstawia artefakt obecny na obrazie rekonstruowanym. Profile
pod rysunkami przedstawiają gęstość badanego obiektu. Artefakt
tego rodzaju występuje głównie, gdy obiekt o mniejszej gęstości
otoczony jest obiektem o gęstości znacznie większej. Sytuacja taka
charakterystyczna jest dla tomografii głowy człowieka, gdzie mózg
otoczony jest kościami czaski.......................................................................
Rys. 22 Artefakty wynikające z obecności przedmiotów o relatywnie
dużej gęstości (wypełnienie stałe zęba) podczas tomografii szczęki.
Obraz a przedstawia schemat poglądowy (prześwietlenie z boku),
obrazy b, c, d to kolejne przekroje przez szczękę pacjenta
(wykonane na różnej „wysokości”). Wyraźnie widoczne jest
zjawisko zwiększania się artefaktów w zależności od ilości materiału
- 84 -
Bibliografia
o podwyższonej gęstości. Obraz zaczerpnięty został z książki
Computed Tomography[Błąd: Nie znaleziono źródła odwołania]............
Rys. 23 Wizualizacja zależności pomiędzy jakością obrazu a
wartością Θ; a) Θ = 20°; b) Θ = 8°; c) Θ = 3°; d) Θ = 1°;
Przypadkiem idealnym jest sytuacja gdy Θ dąży do 0...............................
Rys. 24 Uzyskany profil oraz rozsmarowana projekcja............................
Rys. 25 Uproszczony schemat rekonstrukcji techniką wstecznej
projekcji. Zrekonstruowany obraz jest złożeniem trzech
rozsmarowanych projekcji, uzyskanych z profili zmierzonych pod
kątem 0°, 45° i 90°.........................................................................................
Rys. 26 Etapy rekonstrukcji fantomu Shepp’a-Logan’a. a) Pierwszy
slice – rozsmarowana projekcja wykonana pod kątem 0°; b)
Projekcje w zakresie 0°-10° po połączeniu obrazów składowych; c)
Projekcje w zakresie 0°-90° po połączeniu obrazów składowych; d)
Projekcje w zakresie 0°-180° po połączeniu obrazów składowych –
obraz zrekonstruowany................................................................................
Rys. 27 Powyższy obraz przedstawia rekonstrukcję fantomu
Shepp’a-Logan’a. Wykonane zostało 180 projekcji wiązką
równoległą (co 1 stopień), przy użyciu 1024 detektorów. Uzyskany
obraz ma wymiary 1024x1024 piksele.........................................................
Rys. 28 Różne rodzaje funkcji filtrujących. a – Ramachadran and
Lakshminarayanan, b- filtr kosinusowy I, c- Shepp and Logan, d –
filtr kosinusowy II. Po lewej stronie przedstawiono charakterystykę
filtra w dziedzinie przestrzennej a po prawej stronie widmo w
dziedzinie częstotliwości. Obrazek zaczerpnięto z książki
- 85 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
„Computed Tomography”[Błąd: Nie znaleziono źródła odwołania]
.........................................................................................................................
Rys. 29 Powyższy obraz przedstawia rekonstrukcję z filtrowaniem
fantomu Shepp’a-Logan’a. Wykonane zostało 180 projekcji wiązką
równoległą (co 1 stopień), przy użyciu 1024 detektorów. Uzyskany
obraz ma wymiary 1024x1024 piksele. Zastosowany został filtr
Ramachadran and Lakshminarayanan.......................................................
Rys. 30 Sinogram zawierający projekcje fantomu
zrekonstruowanego na rysunkach Rys. 27] – a (wersja bez filtracji) i
[Rys. 29] – b (wersja z filtracją). Sinogram przedstawiony na
rysunku b odpowiada sino gramowi przedstawionemu na rysunku b
przefiltrowanemu za pomocą funkcji Ramachadran and
Lakshminarayanan.......................................................................................
Rys. 31 Przedstawienie problemu pomiaru projekcji jako operacji
całkowania liniowego w dziedzinie dyskretnej...........................................
Rys. 32 Kolejne kroki rekonstrukcji obrazu o wymiarach 4x4
piksele. aif – wartość projekcji dla obrazu wynikowego, pi –
rzeczywista wartość projekcji dla obrazu wejściowego, aif- pi –
Wartość współczynnika korekcji dla promienia. Rysunek
zaadaptowany z książki „Computed Tomography”[Błąd: Nie
znaleziono źródła odwołania].......................................................................
Rys. 33 Wynik rekonstrukcji fantomu Shepp’a-Logan’a o
rozmiarach 128 x 128 pikseli. Rekonstrukcję wykonano za pomocą
algorytmu SART. Rysunek zaczerpnięty z książki Principles of
Computerized Tomographic Imaging [Błąd: Nie znaleziono źródła
odwołania]......................................................................................................
- 86 -
Bibliografia
Rys. 34 Wizualizacja niezwykle szczegółowych przykładów
przedstawiona w książce Computed Tomography [Błąd: Nie
znaleziono źródła odwołania] autorstwa Thorsten’a Buzug’a..................
Rys. 35 Przedstawienie różnych ułożeń promień-piksel wraz z
odpowiadającymi im wartościami współczynnika wagowego.
Współczynnik wagowy wyraża stosunek pola powierzchni przecięcia
do całkowitego pola powierzchni piksela....................................................
Rys 36. Wyznaczanie pola przecięcia promienia nr 4 i Piela nr 1.
Pole zostanie obliczone na podstawie wielokąta złożonego z dwóch
wierzchołków piksela oraz punktów h3, v3, h2, v2....................................
Rys. 37 Sześciokątne pole przekroju podzielone na trójkąty i
prostokąt. Łatwo jest zauważyć, że znajomość długości wektora x
oraz kąta α jest wystarczająca do obliczenia pola powierzchni
przedstawionych figur...................................................................................
Rys. 38 Rysunek przedstawia wyniki rekonstrukcji rozszerzonego
fantomu Shepp’a-Logan’a opisanego w rozdziale 1.2.1, a – metodą
FBP, b – metodą ART. Rekonstrukcja z projekcji wykonanych co 2
stopnie w zakresie od 0° - 180°.....................................................................
Rys. 39 Wybrany obszar zainteresowania, zawierający obiekty o
różnej gęstości................................................................................................
Rys. 40 Wynik rekonstrukcji a – FBP, b – ART. Wybrany obszar o
rozmiarach 190 x 190 px...............................................................................
Rys. 41 Histogramy wyników rekonstrukcji. FBP – po lewej i ART.
– po prawej.....................................................................................................
- 87 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Rys. 42 Profile obrazów. FBP – po lewej i ART. - po prawej. Profil
poziomy znajduje się w środkowym rzędzie, profil pionowy – na
dole..................................................................................................................
Rys. 43 Odległość zmierzona wzdłuż profilu pionowego...........................
Rys. 44 Rysunek przedstawia zestawienie wyników rekonstrukcji
wycinka szyjki kości udowej. A) rekonstrukcja algorytmem FBP,
rekonstrukcja algorytmem ART., c) wynik rekonstrukcji
oryginalnym oprogramowaniem skanera SkyScan [Błąd: Nie
znaleziono źródła odwołania].......................................................................
Rys. 45 Wybrany obszar obrazu..................................................................
Rys. 46 Zestawienie histogramów uzyskanych obrazów. A)
rekonstrukcja algorytmem FBP, rekonstrukcja algorytmem ART.,
c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2].....................................................................................................
Rys. 47 Profil obrazów wzdłuż poziomej linii profilu (y = 70px). A)
rekonstrukcja algorytmem FBP, rekonstrukcja algorytmem ART.,
c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2].....................................................................................................
Rys. 48 Profil obrazów wzdłuż pionowej linii profilu (x = 125px). A)
rekonstrukcja algorytmem FBP, rekonstrukcja algorytmem ART.,
c) wynik rekonstrukcji oryginalnym oprogramowaniem skanera
SkyScan [2].....................................................................................................
Rys. 49 Zaznaczony odcinek obszaru rekonstrukcyjnego, na
podstawie którego dokonano pomiaru odległości w profilach. Profile
zostały wygenerowane z użyciem środowiska MATLAB odległości
- 88 -
Bibliografia
zostały odczytane z profili za pomocą narzędzi dostępnych w tym
środowisku. Odległość mierzona była pomiędzy punktami profilu
odpowiadającym punktom A i B zaznaczonym na powyższym
obrazie............................................................................................................
- 89 -
Badanie algorytmów rekonstrukcji obrazu tomograficznego
Bibliografia
- 90 -
1
[] Nałęcz T. Obrazowanie Biomedyczne. 2003, Akademicka Oficyna Wydawn. EXIT. ISBN 8387674-63-X
2
[] SkyScan Corporation. http://www.skyscan.be
3
[]Cierniak R. Tomografia komputerowa. Budowa urządzeń CT. Algorytmy rekonstrukcyjne.
2005. ISBN: 83-60434-00-X
4
[] Gabor T. Herman. Fundamentals of Computerized Tomography. 2009 Londyn, e-ISBN 978-184628-723-7
5
[] Thorsten M.Buzug. Computed Tomography. 2008 Springer. ISBN: 978-3-540-39407-5
6
[] Pomoc techniczna do program MATLAB – The Language of Technical Computing. Wersja
7.0.4.356 (R14) Service Pack 2. The MathWorks Inc.
7
[] A. Kak, M. Slaney. Principles of Computerized Tomographic Imaging. 2001 ISBN-13: 978-0898714-94-4
8
[] Kaczmarz S. Angenaherte auflosung von systemen linearer gleichungen. 1937 Bull. Intern.
Acad. Polonaise
9
[] Tadeusiewicz R. Inżynieria Biomedyczna. 2008, ISBN 978-83-7464-168-5
10
[] Ismail Jatoi, William F. Anderson. Cancer Screening. 2005 Current Problems in Surgery,
11
[] Goetzsche PC, Nielsen M. Screening. Cochrane. Screening for breast cancer with
mammography. 2010 The Cochrane Library
12
[]Gabor T. Hjzrman, Arnold Lent Stuart W. Rowland. ART: Mathematics and Applications. A
Report on the Mathematical Foundations and on the Applicability to Real Data of the Algebraic
Reconstruction Techniques. 1973. J. theor. Biol.
13
[]W. Chlewicki, C. Badea, and N. Pallikarakis. Cone Based 3d Reconstruction: A Fdk - Sart
Comparison For Limited Number Of Projections. 2001 MEDICON
14
[] Anders H. Andersen. Algebraic Reconstruction in CT from Limited Views
1989 IEEE Transactions on Medical Imaging
15
[] G.T. Herman, S. Matej, B.M. Carvalho. ART for helical cone-beam CT reconstruction. 2001
Studies in Computational Mathematics
16
[]Ralf Tita, Wolfgang Holler, Sven Huth and Tim C. Lueth. Near Real Time Tomographic 3D
Reconstruction with the use of the PC Graphics Accelerator
2006 IEEE International Conference on Multisensor Fusion and Integration for Intelligent
Systems
17
[]M. Jiang, G. Wang. Convergence of Simultaneous Algebraic Reconstruction Technique
(SART). 2001 IEEE
18
[]M. Chukalina, D. Nikolaev, A. Simionovici.Art In X-Ray Tomography: Image Noise Reduction.
2007. 21st European Conference on Modelling and Simulation
19
[]M. Jiang, G. Wang. Convergence Studies on Iterative Algorithms for Image Reconstruction.
2003 IEEE Transactions On Medical Imaging
20
[]Yizhong Song. Improving on Algebraic Reconstruction Technique. 2008. Fourth International
Conference on Natural Computation
21
[] Biomed Town – The Biomedical Research Community.
http://www.biomedtown.org/biomed_town/LHDL/Reception/datarepository/repositories/BelRep
WikiPages/XRayMicroCTScansOfHumanBoneBiopsies
Dodatek 1 - Dokumentacja użytkowa
oprogramowania
1.1 Dokumentacja użytkowa programu ART Reconstruction
Program ART Reconstruction umożliwia przeprowadzenie procedury rekonstrukcji obrazu
metodą
algebraiczną
dla
geometrii
równoległej
oraz
stożkowej.
Z punktu widzenia interfejsu użytkownika jest bardzo prostym programem.
Interfejs użytkownika powstał w języku angielskim ze względu na fakt, że część pracy
powstawała na University of Patras w Grecji.
Pierwszym krokiem jaki należy wykonać po uruchomieniu programu jest zdefiniowanie
rozmiarów obrazu. Służy do tego pole Image size.
Przed rozpoczęciem procesu rekonstrukcji należy załadować dane. Dane przechowywane są
w plikach binarnych jako zapisane kolejno liczby typu double i przedstawiają one projekcję na
detektor kwadratowy o wymiarach równych wymiarom rekonstruowanego obrazu. Każdy plik
zawierający pojedynczą projekcję powinien zostać nazwany realN.flt, gdzie N oznacza numer
projekcji. Do załadowania danych służy przycisk Load data.
Po załadowaniu danych należy podać pozostałe parametry rekonstrukcyjne, takie jak ilość
promieni (Rays count), rodzaju geometrii, odległościach FDD, FOD oraz rozmiaru piksela
(w
przypadku geometrii wachlarzowej). Konieczne jest także zdefiniowanie kroku obrotu Δθ ( angle
steep).
Użytkownik ma możliwość wyboru pomiędzy rekonstrukcją całego woluminu ( Process all)
a rekonstrukcją wybranej warstwy (poprzez zdefiniowanie slice number a następnie użycie
przycisku Reconstruction).
Przycisk Clear result służy do wyczyszczenia obrazu wynikowego i rozpoczęcia
rekonstrukcji z nowymi parametrami. Jeśli obraz wynikowy nie zostanie wyczyszczony, możliwe
będzie przeprowadzenie kolejnych iteracji (obraz wynikowy iteracji n-1 będzie obrazem bazowym
dla iteracji n).
Grupa funkcji Coloring umożliwia wybór mapy kolorów lub zdefiniowanie własnej. Można
w ten sposób przeskalować wartości szarości w prezentowanym obrazie lub rozszerzyć je o kolory
RGB w celu lepszej prezentacji szczegółów na ekranie.
Zakładka profiles służy do wykreślania profilu zrekonstruowanego obrazu. Profil można
wykreślić wzdłuż linii o wskazanej współrzędnej ( Profile coordinate) zorientowanej pionowo
(Vertical) lub poziomo (Horizontal).
Zakładka advanced umożliwia ustawienie zaawansowanych opcji rekonstrukcyjnych takich
jak losowe uszeregowanie promieni (Distribute rays randomly), przyspieszone obliczanie przekroju
(Fast crossection computing) czy prezentowanie obrazu wynikowego po każdym kroku
rekonstrukcji (Refresh image after etery steep).
Zakładka debug zawiera zestaw opcji pomagających zweryfikować działanie algorytmu i
pozwalających na przetestowanie kroków pośrednich. Nie jest ona dostępna w wersji finalnej
programu.
1.2 Dokumentacja użytkowa programu Rekonstrukcja tomograficzna –
symulacje
Program „Rekonstrukcja tomograficzna – symulacje” pozwala zrozumieć procedurę
rekonstrukcji metodą wstecznej projekcji oraz powiązanie sinogram z procesem rekonstrukcji. Z
listy rozwijalnej można wybrać jeden z sinogramów i następnie, w zależności od wybranej opcji,
obserwować jego rekonstrukcję w wersji z filtracją lub bez. Proces rekonstrukcji przedstawiany jest
krok po kroku, prezentowane wyniki dotyczą geometrii równoległej.
Prezentacja rekonstrukcji kwadratu z projekcji niefiltrowanych (góra) i filtrowanych (dół)
Prezentacja rekonstrukcji fantomu Shepp’a-Logan’a z projekcji niefiltrowanych (góra) i filtrowanych (dół)