1.1. SIŁY PRZEKROJOWE W PŁASKICH UKŁADACH
PRĘTOWYCH
1.1.1. Definicje sił przekrojowych
Siłą podłużną N (x ) w przekroju pręta nazywamy algebraiczną sumę rzutów wszystkich
sił działających po jednej stronie przekroju na oś podłużną pręta w tym przekroju.
Siłą poprzeczną T (x ) w przekroju pręta nazywamy algebraiczną sumę rzutów
wszystkich sił działających po jednej stronie przekroju na oś prostopadłą do osi
podłużnej pręta w tym przekroju.
Momentem zginającym M (x ) w przekroju pręta nazywamy algebraiczną sumę
momentów wszystkich sił działających po jednej stronie przekroju względem środka
ciężkości tego przekroju.
1.1.2. Znakowanie sił przekrojowych
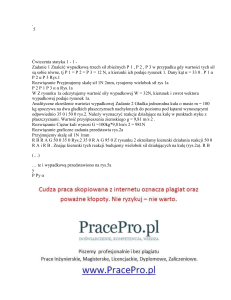
Siła podłużna jest dodatnia, gdy powoduje rozciąganie pręta (rys. 1a).
Siła poprzeczna jest dodatnia, gdy działając na element pręta, wycięty dwoma przekrojami
(przekrojem rozpatrywanym i sąsiednim), dąży do obrócenia wyciętego elementu zgodnie
z ruchem wskazówek zegara (rys. 1a).
Moment zginający jest dodatni, gdy powoduje rozciąganie wyróżnionych włókien pręta,
zwanych spodami (rys. 1a). Spody określają stronę przekroju.
Siły przekrojowe o zwrotach przeciwnych do wyżej wymienionych są ujemne.
Dodatnie rzędne sił podłużnych i poprzecznych odkładamy powyżej osi Ox , zaś
momentów zginających – poniżej (rys. 1b).
Momenty zginające odkładamy zawsze po stronie włókien rozciąganych.
Rys. 1
1.1.3. Zależności między obciążeniem, siłą podłużną, siłą poprzeczną
i momentem zginającym
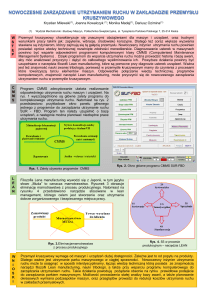
Rozważmy wycięty z pręta element różniczkowy (rys. 2).
Rys. 2
Równania równowagi powyższego elementu maja postać
∑ X = −N + p ⋅ dx + N + dN = p ⋅ dx + dN = 0
(1)
∑ Z =T − q ⋅ dx − T − dT = −q ⋅ dx − dT = 0
(2)
∑M
O
= M +T ⋅
dx
dx
+T ⋅
− M − dM = T ⋅ dx − dM = 0
2
2
(3)
Dzieląc powyższe równania stronami przez dx otrzymujemy
dN (x )
= − p(x )
dx
(4)
dT (x )
= −q (x )
dx
(5)
dM (x )
= T (x )
dx
(6)
oraz
Różniczkując (6) względem zmiennej x oraz wykorzystując (5) otrzymujemy jeszcze
jedną, ważną zależność
d 2M (x ) dT (x )
=
= −q (x )
dx
dx 2
(7)
Z powyższych zależności wynikają ważne wnioski ułatwiające wyznaczanie sił
przekrojowych:
1. W przedziale charakterystycznym, w którym obciążenie p(x ) jest równe zeru, siła
podłużna jest funkcją stałą.
p(x ) = 0 → N (x ) = const.
2. W przedziale charakterystycznym, w którym obciążenie p(x ) jest równomiernie
rozłożone, siła podłużna jest funkcją liniową.
p(x ) = const. → N (x ) = f . liniowa
3. W przedziale charakterystycznym, w którym obciążenie q (x ) jest równe zeru, siła
poprzeczna jest funkcją stałą, zaś moment zginający – funkcją liniową.
q (x ) = 0 → T (x ) = const. → M (x ) = f . liniowa
4. W przedziale charakterystycznym, w którym obciążenie q (x ) jest równomiernie
rozłożone, siła poprzeczna jest funkcją liniową, zaś moment zginający – funkcją
kwadratową.
q (x ) = const. → T (x ) = f . liniowa → M (x ) = f . kwadratowa
5. W punkcie x0 przedziału charakterystycznego, w którym siła poprzeczna zmienia
znak (równa się zeru), moment zginający osiąga wartość ekstremalną
(maksymalną, bądź minimalną – w zależności od znaku drugiej pochodnej).
T (x 0 ) = 0 → M (x0 ) = M ekstr
1.1.4. Zasada zesztywnienia
Przy wyznaczaniu sił biernych (reakcji podpór) i sił przekrojowych przyjmuje się założenie
upraszczające, zwane zasadą zesztywnienia. Zgodnie z tą zasadą siły działające na
nieodkształcony układ prętowy nie zmieniają swojej linii działania po jego odkształceniu.
Znaczy to, że w obliczeniach statycznych układ prętowy traktujemy jako nieodkształcalny
(sztywny).
1.1.5. Wyznaczanie reakcji i sił przekrojowych
1. Gdy nie wiemy, jaki zwrot ma reakcja podporowa, to przyjmujemy go dowolnie. Jeśli z
obliczeń wyniknie, że reakcja ma znak ujemny, to na rysunku zmieniamy jej zwrot na
przeciwny. Pozwala to uniknąć pomyłek przy obliczaniu kolejnych reakcji i określaniu
znaku sił przekrojowych.
2. Równania równowagi powinny (w miarę możliwości) zawierać tylko jedną niewiadomą.
Unikniemy w ten sposób rozwiązywania układów równań.
3. Wartości obliczonych reakcji nanosimy na rysunek. Ułatwia to obliczanie kolejnych
reakcji i wyznaczanie wartości sił przekrojowych.
4. Wartość
siły
poprzecznej
wystarczy
obliczyć
w
kolejnych
punktach
charakterystycznych (nie ma potrzeby wyznaczania jej funkcji w kolejnych przedziałach
charakterystycznych).
5. W punkcie przyłożenia siły skupionej siła poprzeczna jest funkcją nieciągłą. Zatem
obliczamy jej wartość z lewej i prawej strony tego punktu, zaś na wykresie sił
poprzecznych wystąpi w tym miejscu skok wartości funkcji równy wartości przyłożonej
siły.
6. Wartość momentu zginającego obliczamy w kolejnych punktach charakterystycznych,
(nie ma potrzeby wyznaczania jego funkcji w kolejnych przedziałach
charakterystycznych). Wyjątkiem jest przedział, w którym moment zginający osiąga
ekstremum.
7. W punkcie przyłożenia momentu skupionego moment zginający jest funkcją nieciągłą.
Zatem obliczamy jego wartość z lewej i prawej strony tego punktu, zaś na wykresie
momentów zginających wystąpi w tym miejscu skok wartości funkcji równy wartości
przyłożonego momentu skupionego.
Przykłady
Przykład 1. Wyznaczyć reakcje oraz sporządzić wykresy sił przekrojowych w przypadku belki o schemacie
statycznym, obciążeniu i przekroju jak na rys P1.1.
Dane: P , l, q = 2P l , M = Pl
Szukane: H A, VA, M A, VB , N, T , M
Rys P1.1
Rozwiązanie:
Krok 1. Wyznaczamy reakcje podporowe
Nanosimy spody, punkty charakterystyczne i reakcje podporowe (rys. P1.2), i wypisujemy równania
równowagi.
∑ X = HA = 0
→ HA = 0
∑ MCP = P ⋅ l + VB ⋅ l = 0
→ VB = −P
Na rys. P1.3a zmieniamy zwrot reakcji VB na przeciwny
∑ MA = MA +
2P
⋅ 2l ⋅ l + P ⋅ l − P ⋅ 3l − 2P ⋅ 2l = 0 → M A = 2Pl
l
∑ MCL = VA ⋅ 2l + 2Pl −
2P
⋅ 2l ⋅ l = 0 → VA = P
l
Rys P1.2
Sprawdzenie
∑Y = P −
2P
⋅ 2l + 2P + P = 0
l
Krok 2. Wyznaczamy siły przekrojowe
Siła podłużna N (x )
W rozważanym przypadku jest równa zeru (rys. P1.3b).
Siła poprzeczna T (x )
TA = TAP = P
TCL = P −
2P
⋅ 2l = −3P
l
TCP = TCL + 2P = −3P + 2P = −P
TB = TBL = −P
Wykres siły poprzecznej w funkcji położenia przedstawia rys. P1.3c. Z wykresu tego wynika, że wewnątrz
przedziału charakterystycznego A − C , siła poprzeczna zmienia znak. Ponieważ w punkcie zmiany znaku
siły poprzecznej moment zginający osiąga maksimum lokalne, musimy zatem wyznaczyć położenie xo tego
punktu. Można to uczynić dwoma sposobami:
obliczając wartość siły poprzecznej w tym punkcie i przyrównując ja do zera:
T (xo ) = P −
2P
l
⋅ xo = 0 → xo = = 0.5l
l
2
z proporcji (rys. P1.3c):
P
3P
l
=
→ xo = = 0.5l
xo 2l − xo
2
Moment zginający M (x ) .
M A = M AP = 2Pl
l
l
2P l 1 l 9
Mmax = M xo = = P ⋅ + 2Pl −
⋅ ⋅ ⋅ = Pl = 2.25Pl
2
2
l 2 2 2 4
MC = 0
MDL = −Pl + P ⋅
MDP = P ⋅
l
Pl
=−
= −0.5Pl
2
2
l
= 0.5Pl
2
MB = 0
Wykres momentu zginającego w funkcji położenia przedstawia rys. P1.3d.
Rys P1.3
Przykład 2. Wyznaczyć reakcje oraz sporządzić wykresy sił przekrojowych w przypadku ramy o schemacie
statycznym, obciążeniu i przekroju jak na rys P2.1.
Rys P2.1
Dane: P , l, q = P l , M = Pl
Szukane: H A, VA, M A, VB , N, T , M
Rozwiązanie:
Krok 1. Wyznaczamy reakcje podporowe
Nanosimy spody, punkty charakterystyczne i reakcje podporowe (rys. P2.2) i wypisujemy równania
równowagi. Obliczone wartości reakcji podporowych nanosimy na rys. P2.3.
∑ MCP = Pl + P ⋅ 2l + HB ⋅ l = 0
→ HB = −3P
Na rys. P2.3 zmieniamy zwrot reakcji HB na przeciwny
Rys P2.2
∑ M A = −M A +
P
⋅ 2l ⋅ l + P ⋅ l + P ⋅ 2l − 4P ⋅ 2l + 3P ⋅ l = 0 → M A = 0
l
∑ MCD = 0 − HA ⋅ 2l −
P
⋅ 2l ⋅ l = 0 → H A = −P
l
Na rys. P2.3 zmieniamy zwrot reakcji H A na przeciwny
∑ MB = VA ⋅ 2l + P ⋅ l + Pl − 4P ⋅ l = 0 → VA = P
Rys P2.3
Sprawdzenie
P
∑ X = − P + l ⋅ 2l − 4P + 3P = 0
∑Y = P − P = 0
Krok 2. Wyznaczamy siły przekrojowe
Siła podłużna N (x )
NAC = −P
NCE = −P
NEB = 0
Wykres siły podłużnej w funkcji położenia przedstawia rys. P2.4a.
Siła poprzeczna T (x )
TA = TAP = P
TCL = P −
P
⋅ 2l = −P
l
TCP = P
TB = TBL = −3P
Wykres siły poprzecznej w funkcji położenia przedstawia rys. P2.4b. Z wykresu tego wynika, że wewnątrz
przedziału charakterystycznego A − C , siła poprzeczna zmienia znak. Ponieważ w punkcie zmiany znaku
siły poprzecznej moment zginający osiąga maksimum lokalne, musimy zatem wyznaczyć położenie xo tego
punktu. Można to uczynić dwoma sposobami:
obliczając wartość siły poprzecznej w tym punkcie i przyrównując ją do zera:
T (xo ) = P −
P
⋅ xo = 0 → xo = l
l
z proporcji (rys.P2.4b):
P
P
=
→ xo = l
xo 2l − xo
Moment zginający M (x )
MA = 0
Mmax = M (xo = l ) = P ⋅ l −
P
1
Pl
⋅l ⋅ ⋅l =
= 0.5Pl
l
2
2
MC = 0
P
1
⋅ 2l ⋅ ⋅ 2l = Pl
l
2
MDP = MDL + Pl = Pl + Pl = 3P ⋅ l − P ⋅ 2l = 2Pl
MDL = Pl + P ⋅ 2l −
ME = 3P ⋅ l = 3Pl
MB = 0
Wykres momentu zginającego w funkcji położenia przedstawia rys. P2.4c.
Rys. P2.4