Ćwicz. 1
Sensory i elementy wykonawcze automatyki SiEWA/LSPM
Temat ćwiczenia: LINIOWE SENSORY POLA MAGNETYCZNEGO
1. Wprowadzenie
Celem ćwiczenia jest zapoznanie się z współcześnie produkowanymi hallotronami –
sensorami pola magnetycznego. Są one często stosowane w robotyce jako bezkontaktowe
czujniki zbliżeniowe, położenia i prędkości obrotowej. Ich zaletą jest duża odporność na
wibracje, zawilgocenie, zabrudzenie, zaolejenie itp.
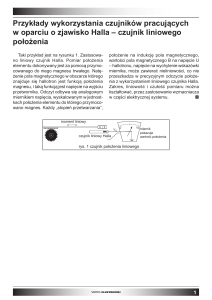
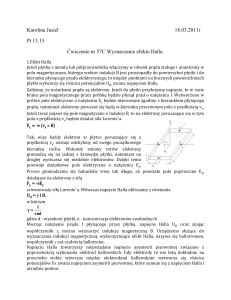
Zasada działania hallotronów wykorzystuje zjawisko Halla - powstawanie poprzecznego
pola elektrycznego w znajdującym się w polu magnetycznym przewodniku lub półprzewodniku
z prądem. Zjawisko to związane jest z wpływem siły Lorentza na ruch nośników ładunku
elektrycznego, poruszających się w polu magnetycznym. W przypadku materiałów o jednym
typie przewodnictwa odchylenie Lorentza powoduje, że przy jednej ściance powstaje nadmiar
nośników, a przy przeciwnej ich niedobór. Odchylanie nośników prądu zachodzi dopóty, dopóki
powstałe poprzeczne pole elektryczne nie zrównoważy działania siły Lorentza.
θ- kąt Halla
Rys.1. Efekt Lorentza
Rys.2. Zjawisko Halla.
Napięcie Halla jest wprost proporcjonalne do indukcji pola magnetycznego i wynosi (przy
uwzględnieniu pokazanych na rysunku 2 kierunków prądu I i wektora indukcji B):
VH GRH I
BX
d
,
gdzie: - G – współczynnik uwzględniający geometrię płytki (G=1 dla L/W > 3),
- d – grubość płytki,
- RH – stała Halla (zależna od temperatury).
W liniowych hallotronach napięcie Halla wzmacniane jest przy pomocy wzmacniacza
scalonego, umieszczonego w obudowie sensora. Hallotron powinien cechować się dużą czułością
i wysoką liniowością i (stałą w odpowiednio dużym zakresie zmian temperatury). Główne
problemy konstrukcyjne takich sensorów to minimalizacja:
a) napięcia niezrównoważenia, powstającego wskutek asymetrii geometrycznych, gradientów
rezystancyjnych i naprężeń mechanicznych;
b) zmian czułości w funkcji temperatury;
c) wpływu temperatury na pole magnetyczne magnesu trwałego (o ile czujnik współpracuje
z takim magnesem).
317529892
1
22/07/2017
Ćwicz. 1
Sensory i elementy wykonawcze automatyki SiEWA/LSPM
W ćwiczeniu wykorzystywane są dwa rodzaje scalonych, półprzewodnikowych hallotronów
liniowych: A3508 firmy Allegro MicroSystems i AD22151 firmy Analog Devices. Ich napięcie
niezrównoważenia zmniejszane jest różnymi technikami:
Rys.3. Sposoby likwidowania napięcia niezrównoważenia. Z lewej - technika wielokrotnych
sensorów w układzie A3508, z prawej – elektronicznie obracany sensor (ang. dynamic
offset cancelation) w hallotronie AD22151.
Czułość układu A3508 jest stała i wynosi 25 mV/mT. Kompensacja temperaturowych zmian
parametrów magnesu trwałego jest dostosowana do magnesu określonego typu (samarowokobaltowego).
W układzie AD22151 czułość jest regulowana przez dobór rezystorów zewnętrznych,
ustalających wzmocnienie wewnętrznego wzmacniacza napięcia Halla (w zestawach
laboratoryjnych ustalona jest na 50 mV/mT). W podobny sposób, elastycznie dobiera się w tym
hallotronie kompensację temperaturowych zmian parametrów magnesu trwałego. Wykorzystuje
ona sensor temperatury, zawarty w układzie scalonym.
W obu sensorach osie największej czułości są prostopadłe do powierzchni obudowy.
2. Zestaw aparatury
1. Zasilacze napięcia stałego: a) 0÷+5V/1A o regulowanym napięciu wyjściowym,
umożliwiający cyfrowy odczyt wartości prądu wyjściowego;
b) +7÷15V/0.03A;
2. Woltomierz cyfrowy napięcia stałego.
3. Oscyloskop.
4. Zestawy ćwiczeniowe MAGN/1, MAGN/2 i MAGN/3 (z adapterem AC/AC 220V~/13V~).
317529892
2
22/07/2017
Ćwicz. 1
Sensory i elementy wykonawcze automatyki SiEWA/LSPM
3. Zadania
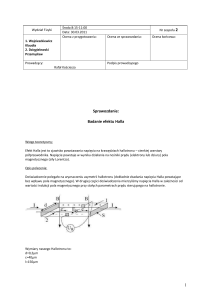
3.1. Przemieszczanie liniowego czujnika Halla w polu magnesu trwałego.
Zestaw MAGN/1 zasilić napięciem stałym o wartości w zakresie +7÷15V. Przy pomocy
woltomierza napięcia stałego zmierzyć charakterystyki UWY(x), odpowiadające przesuwaniu
hallotronów SEN1 i SEN2 (typu AD22151), usytuowanych w polu magnesu trwałego w tzw.
pozycji bocznej (ang. slide-by sensing).
Płytka drukowana
x
Płytka drukowana
SEN1
x
AD22151
N
SEN2
AD22151
S
MAGNES
TRWAŁY
S
MAGNES
TRWAŁY
N
Płyta ze szkła
organicznego
Płyta ze szkła
organicznego
Rys.4. Usytuowanie magnesów trwałych w stosunku do powierzchni hallotronów w zestawie
MAGN/1.
Oszacować wielkość szczeliny pomiędzy sensorem a magnesem trwałym. W charakterystycznych punktach zmierzonych zależności zaobserwować wpływ wielkości szczeliny,
zmieniając ją przez delikatne odginanie płytki drukowanej z sensorami.
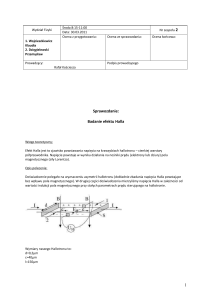
3.2. Detekcja zębów w kole zębatym przy pomocy liniowego sensora Halla.
Zestaw MAGN/3 zasilić przy pomocy adaptera AC/AC 220V~/13V~. Przewód wyjściowy
podłączyć do oscyloskopu. Przy wyłączonym napędzie zdjąć koło zębate i zmierzyć
oscyloskopem napięcie stałe na wyjściu sensora AD22151 (czułość 50 mV/mT), związane
z polem magnesu trwałego 1, umieszczonego w obudowie za sensorem.
MAGNES
TRWAŁY 1
S
N
Płytka drukowana
SEN4
AD22151
N
S
MAGNES
TRWAŁY 2
STALOWE
KOŁO ZĘBATE
Rys.5. Usytuowanie magnesów trwałych w stosunku do powierzchni hallotronu w zestawie
MAGN/3.
317529892
3
22/07/2017
Ćwicz. 1
Sensory i elementy wykonawcze automatyki SiEWA/LSPM
Załączyć napęd koła zębatego. Zaobserwować i zarejestrować kształt przebiegu na wyjściu
sensora. Określić amplitudy napięć, wynikających z zaburzania pola magnesu trwałego 1
przez:
a) wcięcia w kole zębatym;
b) przez magnes trwały 2, umieszczony w jednym z wcięć w kole.
Zmierzyć czas pomiędzy kolejnymi zaburzeniami, wprowadzanymi przez magnes trwały 2.
4. Opracowanie
4.1. Przedstawić w postaci wykresów ch-ki B(x) zmierzone w p.3.1, odpowiadające przemieszczaniu bocznemu sensorów SEN1 i SEN2 w polach magnesów trwałych (czułość
hallotronów AD22151 ustawiono na 50 mV/mT, a napięcie stałe na wyjściu sensora dla B=0
wynosi 2,50 V). Skomentować wpływ szczeliny pomiędzy sensorem a magnesem trwałym
na zmierzone charakterystyki. Zasugerować sposób realizacji sensorów położenia i
zbliżeniowych przy wykorzystaniu zbadanych hallotronów.
4.2. Wykreślić ch-kę UWY(I), zmierzoną w p.3.2 i ocenić jej liniowość.
4.3. Określić indukcję pola magnetycznego wstępnego (pochodzącego od magnesu trwałego 1)
w punkcie, w którym umieszczony jest sensor Halla; założyć należy w tym celu, że napięcie
stałe na wyjściu sensora dla B=0 wynosiłoby 2,5V. Określić prędkość obrotową badanego
koła zębatego.
Przedyskutować przydatność liniowego sensora Halla do pomiaru parametrów ruchu obrotowego kół zębatych, po ewentualnym uzupełnieniu dodatkowym (jakiego typu?) układem
elektronicznym. Podać przykłady potencjalnych zastosowań takich czujników.
317529892
4
22/07/2017