Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Teoria sterowania – traktuje elementy układu sterowania jak i sam układ
sterowania jako system
System:
y S u
Klasyfikacje:
- Liniowy - nieliniowy
- Stacjonarny - niestacjonarny
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
1
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Klasyfikacje: c.d.
- Jednowymiarowy (SISO) – wielowymiarowy (MIMO)
Klasyfikacja w odniesieniu do liczby zmiennych wejścia - wyjścia
- Czasu ciągłego – czasu dyskretnego
Klasyfikacja w odniesieniu charakteru sygnałów wejścia i wyjścia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
2
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Wybrane elementy wprowadzenia do teorii
sterowania
Systemy liniowe, stacjonarne,
ze sprzężeniem zwrotnym
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
3
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Jak możemy traktować modele obiektów dynamicznych?
Przedstawiają one prawo przetwarzania sygnału wejściowego obiektu u(t) w sygnał
wyjściowy obiektu y(t) bezpośrednio lub z wykorzystaniem zmiennych stanu x(t)
Prawo to umożliwia dla danego kształtu u(t) i znanych odpowiednich wartości
początkowych określić kształt y(t)
Czy to trudne zadanie? Dla układów liniowych ze stałymi współczynnikami – nie
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
4
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Rozważamy najpierw równanie modelu wejście – wyjście w którym nie występują
pochodne sygnału wejścia
dny
d n 1 y
dy
an n an 1 n 1 a1
a0 y u t
dt
dt
dt
(1)
z warunkami początkowymi:
y0 y0 , y 0 y0 , , y n 1 0 y0 n 1
(2)
Czy potrafilibyśmy zbudować urządzenie, które rozwiązywałoby takie równanie?
Schematy analogowe
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
5
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Taką samą strukturę mają poszczególne równania stanu w modelu stanu
dxi
i A x i B u 0
dt
(3)
lub:
dxi
ai 1 x1 aii xi ain xn bi 1u1 b ip u p 0
dt
z warunkiem początkowym:
xi 0 xi ,0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
(4)
6
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
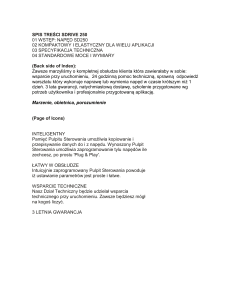
Czy potrafimy zbudować sumator (układ elektroniczny)?
Uf
R1
Uwe1
if
i1
Uwe2
R2
ig
i2
Uwe2
Rf
i 1
Ri
uwy t
Rf
eg - K
+
n
Uwy
u1(t)
u2(t)
un(t)
uwe ,i t
k1
y(t)
k2
...
Uwe1
kn
n
y t ki ui t
i 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
7
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
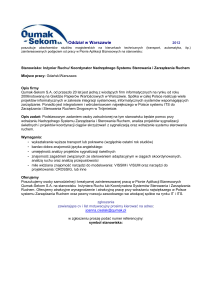
Czy potrafimy zbudować integrator (układ elektroniczny)?
uf
uwe
R
uwe
if
iwe ig
eg
Cf
-
-K
Rwe, Rwy
+
1
uwy t
RC f
t
u
we
d uwy 0
0
uwy
y0
u(t)
y(t)
k
t
yt u d y0
0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
8
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dla równania modelu wejście – wyjście
Zapiszmy:
an 1 d n 1 y
dny 1
a1 dy a0
u
t
y
n
n 1
dt
an
an dt
an dt an
(1a)
oraz warunki początkowe:
y0 y0 , y 0 y0 , , y n 1 0 y0 n 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
(2a)
9
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
- uzyskiwanie pochodnych niższych rzędów – idea całkowania równania
y(n-1) (t)
(n)
y (t)
- zadawanie warunków
początkowych
y(n-2) (t)
.
y(t)
y (t)
- uzyskiwanie najwyższej pochodnej
u(t)
1
an
k
y0
u(k)(t)
y k 1 t
y· (t)
y(n-1) (t)
Kazimierz Duzinkiewicz, dr hab. inż.
a0
an
y(n)(t)
a1
an
...
y(t)
a n 1
an
Katedra Inżynierii Systemów Sterowania
10
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
u (t)
y(t)
y0 n2
y0
a0
an
a
1
an
y(n)(t)
y(n-1) (t)
y(n-2) (t)
.
y(t)
y (t)
...
y· (t)
y0 n1
1
an
y(n-1) (t)
a n 1
an
Schemat analogowy rozwiązywania równania różniczkowego
dny
d n 1 y
dy
an n an 1 n 1 a1
a0 y u t
dt
dt
dt
(1)
z warunkami początkowymi:
y0 y0 , y 0 y0 , , y n 1 0 y0 n 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
(2)
11
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dla równania stanu modelu przestrzeni stanu
Zapiszmy:
dxi
ai 1 x1 aii xi ain xn bi 1u1 b ip u p
dt
(3a)
oraz warunek początkowy:
xi 0 xi ,0
Kazimierz Duzinkiewicz, dr hab. inż.
(4a)
Katedra Inżynierii Systemów Sterowania
12
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
A jeżeli występują pochodne sygnału wejścia?
Przykład
Równanie:
d 3 yt
d 2 yt
dyt
d 2u t
du t
3
.
5
3
.
5
y
t
1
.
2
0.35u t
3
2
2
dt
dt
dt
dt
dt
Warunki początkowe
d 2 y0
dy0
du 0
0
.
8
,
0
.
2
,
y
0
0
.
1
;
0.7 ,u 0 1.0
2
dt
dt
dt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
13
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zapiszmy równanie:
d 3 y d 2u
d2y
du
dy
3
.
5
1
.
2
3
.
5
0.35u y
3
2
2
dt
dt
dt
dt
dt
Scałkujmy je jednokrotnie:
t
d 2 y du
dy
3.5 1.2u 3.5 y 0.35u y d C2
2
dt
dt
dt
0
C2 wyznaczymy kładąc t=0 i korzystając z warunków początkowych
d 2 y 0 du 0
dy 0
C2
3
.
5
1.2u 0 3.5 y 0
2
dt
dt
dt
0.8 0.7 3.5 0.2 1.2 1.0 3.5 0.1
0.8 0.0 0.85 0.05
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
14
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Powtórzmy operację całkowania:
t
t t
dy
u 3.5 y 1.2u 3.5 y d 0.35u y d C1
dt
0
0 0
C1 wyznaczymy kładąc t=0 i korzystając z warunków początkowych
dy 0
C1
u 0 3.5 y 0 0.2 1.0 3.5 0.1
dt
0.2 0.65 0.45
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
15
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Wykonajmy operacje całkowania po raz trzeci
t
t t
t t t
0
0 0
0 0 0
yt u 3.5 y d 1.2u 3.5 y d 0.35u y d C0
C0 wyznaczymy kładąc t=0 i korzystając z warunków początkowych
C0 y0 0.1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
16
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
d 3 y d 2u
d2y
du
dy
2 3.5 2 1.2 3.5 0.35u y
3
dt
dt
dt
dt
dt
t
t t
t t t
0
0 0
0 0 0
yt u 3.5 y d 1.2u 3.5 y d 0.35u y d C0
u (t)
C1
C2
0.35
1.2
C0
1.0
y (t)
Poznaliśmy metodę
kolejnych całkowań
– metodę postaci
kanonicznej
Kazimierz Duzinkiewicz, dr hab. inż.
-1.0
-3.5
-3.5
Katedra Inżynierii Systemów Sterowania
17
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Jeżeli występują pochodne sygnału wejścia a warunki początkowe są
zerowe dogodniejsza jest metoda zmiennej pomocniczej
Przykład
Równanie:
d 2 yt
dy
du t
3
2
y
t
2
u t
2
dt
dt
dt
Warunki początkowe
dy 0
0 , y 0 0; u 0 0
dt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
18
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Transformacja Laplace’a i transmitancja operatorowa
Rozważaliśmy dotychczas w dziedzinie czasu zachowanie się obiektu
dynamicznego w przedziale czasu od t0 do t opisywanego równaniem
różniczkowym
Przykład 1 – czwórnik RC
R
t=0
uR(t)
uwe(t)
duwy t
dt
Przykład 2 – dwójnik RL
iobc(t)
iR(t)
iC(t)
uC(t)
C
uwy(t)
z warunkiem początkowym:
u wy 0 uC 0 uC 0
iR(t)
uR(t)
uwe(t)
1
1
uwy t
uwe t
R C
R C
Kazimierz Duzinkiewicz, dr hab. inż.
R
t=0
uL(t)
iL(t)
L
diL t
R
1
iL t u we t
dt
L
L
z warunkiem początkowym:
iL 0 iL0
Katedra Inżynierii Systemów Sterowania
19
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Ogólna struktura:
dy
a yt b u t (1a)
dt
(1b)
yt0 y0
u(t)
Obiekt
y(t)
Dla dowolnego wejścia u(t) określonego w przedziale [t0,t] pełna odpowiedź
obiektu
t
yt y0e a t t0 u b e a t d
t0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
20
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dokonamy przejścia do dziedziny zmiennej zespolonej s
Załóżmy, że zarówno funkcja (reprezentacja matematyczna sygnału) u(t) –
wejście, jak i y(t) – wyjście, spełnia warunki pozwalające poddać je
przekształceniu Laplace’a
U s Lut
Y s Lyt
Pamiętać powinniśmy o warunkach jakie muszą spełniać funkcje f(t)
(funkcje czasu) poddawane transformacji Laplace’a
Transformację Laplace’a możemy stosować do systemów liniowych (czyli
spełniających zasadę superpozycji) i stacjonarnych (czyli spełniających
zasadę niezmienniczości w czasie)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
21
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Funkcja f(t) musi spełniać
f t 0 dla t 0
(L1)
Całka
F s f t e st dt
musi istnieć (być zbieżna)
(L2)
0
Poddając transformacji Laplace’a obydwie strony (1a) i uwzględniając
znajomość (1b) otrzymamy
sY s y0 a Y s
d
L y t
dt
Kazimierz Duzinkiewicz, dr hab. inż.
La yt
bU s
(2)
Lb ut
Katedra Inżynierii Systemów Sterowania
22
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
sY s y0 a Y s bU s
Rozwiązując (2) ze względu na Y(s)
s aY s y0 bU s
Y s
1
b
y0
U s
s a
s a
Składowa
swobodna
odpowiedzi
Składowa
wymuszona
odpowiedzi
Składowa swobodna:
y 0
yZI t L1 Y s u t 0 L1
s a
Składowa wymuszona:
yZS t L Y s y 0 0
1
Kazimierz Duzinkiewicz, dr hab. inż.
b
L
U s
s a
1
Katedra Inżynierii Systemów Sterowania
23
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Transformata Laplace’a składowej wymuszonej:
YZS s
b
U s G s U s
s a
G s
Y s
b
ZS
s a U s
gdzie,
- Transmitancja operatorowa
obiektu dynamicznego
I definicja transmitancji obiektu dynamicznego
Transmitancją operatorowa obiektu dynamicznego (liniowego, stacjonarnego)
nazywamy stosunek transformaty Laplace’a składowej wymuszonej odpowiedzi
tego obiektu na wymuszenie do transformaty Laplace’a tego wymuszenia
lub inaczej:
Transmitancją operatorowa obiektu dynamicznego (liniowego, stacjonarnego)
nazywamy stosunek transformaty Laplace’a odpowiedzi tego obiektu na
wymuszenie uzyskanej przy zerowym warunku początkowym, do transformaty
Laplace’a tego wymuszenia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
24
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Transmitancja obiektu dynamicznego – na przykładzie obiektu rzędu
pierwszego, np. czwórnika RC, dwójnika RL
YZS s
b
G s
s a U s
Właściwości:
(i) G(s) – wzmocnienie dynamiczne obiektu w dziedzinie s
(ii) G(s) – nie ma stałej wartości, lecz jest funkcją zmiennej s
(iii) G(s) – nie zależy od sygnału wejściowego – jest zatem
charakterystyką obiektu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
25
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Transmitancja obiektu opisuje dynamikę obiektu w dziedzinie
zmiennej zespolonej s
Odpowiedź impulsowa obiektu opisuje dynamikę obiektu w
dziedzinie czasu t
Związek pomiędzy nimi?
YZS s Gs U s
Transformata Laplace’a impulsu jednostkowego:
ut t Lut U s 1
YZS s u t t G s L t G s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
26
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Otrzymaliśmy:
g t L1Gs lub
Składowa
wymuszona
odpowiedzi na
impuls jednostkowy
Gs Lg t
Transmitancja
obiektu
dynamicznego
II definicja transmitancji obiektu dynamicznego
Transmitancją operatorowa obiektu dynamicznego (liniowego,
stacjonarnego)
nazywamy transformatę Laplace’a składowej
wymuszonej odpowiedzi tego obiektu na wymuszenie impulsem
jednostkowym
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
27
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
W rozważanym przykładzie – obiekt pierwszego rzędu
yZS t b S e a t t0 - odpowiedź dla ut t t0 i intensywności S
Dla t0 = 0 i S = 1:
yZS t b e at
Otrzymamy:
L b e at
b
sa
Kazimierz Duzinkiewicz, dr hab. inż.
(porównać z wynikami z poprzednich slajdów)
Katedra Inżynierii Systemów Sterowania
28
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Przykład 1 – czwórnik RC
R
t=0
uR(t)
uwe(t)
iobc(t)
iR(t)
iC(t)
uC(t)
C
uwy(t)
duC
1
1
uC t
uwe t
dt
RC
RC
uC t0 0
Kazimierz Duzinkiewicz, dr hab. inż.
1
1
sU C s
U C s
U we s
RC
RC
1
U s
1
RC
G s C
U we s
1 1 RCs
s
RC
Katedra Inżynierii Systemów Sterowania
29
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Przykład 2 – dwójnik RL
R
t=0
uR(t)
uwe(t)
iR(t)
uL(t)
iL(t)
L
diL t
R
1
iL t u we t
dt
L
L
iL 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
R
1
sI L s I L s U we s
L
L
1
1
I s
L
G s L
R
U we s
R 1 L s
s
R
L
Katedra Inżynierii Systemów Sterowania
30
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Odpowiedź wymuszona na sygnał skokowy o amplitudzie U
ut
u t U 1t t0
U
0
LU 1t t0
U t 0 s
e
s
t
s
t0
dla t0 =0:
LU 1t
U
s
Odpowiedź wymuszona w dziedzinie s:
b U t 0 s
YZS s Gs U s
e
sa s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
31
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Odpowiedź wymuszona w dziedzinie t:
b U t 0 s
1
t0 s
1
yZS t L YZS s L
e bU L
e
s a s
ss a
1
1
Zastosujemy dla znalezienia L-1 metodę rozkładu na ułamki proste:
1
B
1 A
L
L
s
s
a
s
s
a
1
1
A B 0 A a
As a Bs 1 A B s Aa 1
1
Aa 1
B A
a
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
32
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Stąd:
1
1 1 1 1 t 0 s
t0 s
1
e bU L
y ZS t bU L
e
a s a s a
s s a
1
1 t0 s b
1
b
a t t 0
1
e
t
t
1
U
e
U L
0
a
a
s s a
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
33
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Parametry transmitancji obiektu rzędu pierwszego inercyjnego
b
yZS t U 1t t0 e a t t0
a
yZS t
b
U
a
dla rozważanego przykładu
t
0
Wielkość
t0
y ZS t ustalona wartosc
b
K
u t ustalona wartosc
a
nazywamy statycznym współczynnikiem wzmocnienia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
34
Teoria sterowania SN
Przykład 1 – czwórnik RC
1
b
K RC 1
1
a
RC
Kazimierz Duzinkiewicz, dr hab. inż.
Schematy analogowe i blokowe, realizowalność modeli stanu
Przykład 2 – dwójnik RL
1
b
1
L
K
R
a
R
L
Katedra Inżynierii Systemów Sterowania
35
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Określanie wzmocnienia statycznego – wykorzystanie transmitancji
ut
yt
Obiekt
ut
yt
A
yust
t
0
yust
K
A
Kazimierz Duzinkiewicz, dr hab. inż.
0
t
- wzmocnienie statyczne
Katedra Inżynierii Systemów Sterowania
36
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Określanie wzmocnienia statycznego – wykorzystanie transmitancji
ut
yt
Obiekt
ut
yt
A
yust
t
0
yust
K
A
Kazimierz Duzinkiewicz, dr hab. inż.
0
t
- wzmocnienie statyczne
Katedra Inżynierii Systemów Sterowania
37
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
oraz
K
yust
lim G s
s 0
A
Przykład 3
Wyznaczyć wzmocnienie statyczne obiektu o transmitancji
s 4 3s 2 s 5
G s 10
s 12s 6 6s 3 2
W dziedzinie czasu opis równaniem różniczkowym:
Y s s 4 3s 2 s 5
Gs
U s s10 12s 6 6s 3 2
Y s s10 12Y s s 6 6Y s s 3 2Y s U s s 4 3U s s 2 U s s 5U s
d 10 yt
d 6 yt
dy 3 t
d 4u t
d 2u t du t
12
6
2 yt
3
5u t
10
6
3
4
2
dt
dt
dt
dt
dt
dt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
38
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
W dziedzinie czasu należałoby teraz rozwiązać równanie różniczkowe
dla wymuszenia
ut A 1t
Mając y(t) należałoby obliczyć
lim y t
t
i ostatecznie wyznaczyć K
Korzystając z transmitancji:
s 4 3s 2 s 5
5
K lim Gs lim 10
s 0
s 0 s 12 s 6 6 s 3 2
2
Dla np. A = 3 odpowiedź ustalona:
yust K A
Kazimierz Duzinkiewicz, dr hab. inż.
5
15
3
2
2
Katedra Inżynierii Systemów Sterowania
39
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
W dziedzinie czasu należałoby teraz rozwiązać równanie różniczkowe
dla wymuszenia
ut A 1t
Mając y(t) należałoby obliczyć
lim y t
t
i ostatecznie wyznaczyć K
Korzystając z transmitancji:
s 4 3s 2 s 5
5
K lim Gs lim 10
s 0
s 0 s 12 s 6 6 s 3 2
2
Dla np. A = 3 odpowiedź ustalona:
yust K A
Kazimierz Duzinkiewicz, dr hab. inż.
5
15
3
2
2
Katedra Inżynierii Systemów Sterowania
40
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Przedstawmy odpowiedź wymuszoną:
b
yZS t U 1t t0 e a t t0
a
b
yZS t U 1 e a t t0 ; t t0
a
dla rozważanego przykładu
yZS t
1
T
Wielkość
a
b
U
a
1
T - nazywamy stałą
a czasową bezwładności
(inercji)
0
Policzmy:
t
t0
d
b
yZS t U a e a t t0 t t0
dt
a
t t 0
Kazimierz Duzinkiewicz, dr hab. inż.
b
U
bU a tg
1
a
Katedra Inżynierii Systemów Sterowania
41
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Podsumowanie:
W automatyce wyróżniamy pewne tzw. człony elementarne liniowe i
stacjonarne, stanowiące części obiektu sterowanego lub układu
sterującego charakteryzujące się określoną transmitancją
operatorową
Poznaliśmy już jeden z takich członów:
Przykład 1 – czwórnik RC
R
t=0
uR(t)
uwe(t)
Przykład 2 – dwójnik RL
iobc(t)
iR(t)
iC(t)
uC(t)
C
U s
1
G s C
U we s 1 RCs
Kazimierz Duzinkiewicz, dr hab. inż.
R
t=0
uwy(t)
uR(t)
uwe(t)
iR(t)
uL(t)
1
I s
G s L
R
U we s 1 L s
R
Katedra Inżynierii Systemów Sterowania
iL(t)
L
42
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Standardowa postać transmitancji tych układów:
G s
Y s
K
U s 1 Tb s
Parametry:
K
- współczynnik wzmocnienia statycznego
Tb - stała czasowa bezwładności
Nazwa członu:
Człon inercyjny pierwszego rzędu
Inne człony poznamy w dalszej części wykładu i podczas ćwiczeń !
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
43
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Wróćmy do tematu schematów analogowych
Równanie poddajemy obustronnie transformacji Laplace’a:
s
2
3s 2 Y s 2s 1U s
Wprowadzamy zmienną pomocniczą spełniającą równanie:
s
Wówczas:
s
2
2
3s 2 YP s U s
3s 2 Y s 2s 1 s 2 3s 2 YP s
Zamiast pierwotnego równania modelujemy dwa równania:
s
2
3s 2 YP s U s
Y s 2s 1YP s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
44
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
W dziedzinie czasu dwa modelowane równania:
d 2 yp
dt
2
3
2
dy p
dt
dy p
dt
2 yp u
- równanie zmiennej pomocniczej
yp y
- równanie wyjścia
Zróżniczkujemy równanie wyjścia:
dy 2p
dy p
dy
2 2
dt
dt
dt
d 2 y p 0
Dla t=0 otrzymamy:
dt
2
3
dy p 0
2
2
Kazimierz Duzinkiewicz, dr hab. inż.
dy 2p 0
dt 2
2 y p 0 u 0
dt
dy p 0
dt
dy p 0
dt
y p 0 y0
Katedra Inżynierii Systemów Sterowania
dy 0
dt
45
Teoria sterowania SN
d 2 yp
dt
2
3
2
dy p
dt
dy p
dt
Schematy analogowe i blokowe, realizowalność modeli stanu
2 yp u
- równanie zmiennej pomocniczej
yp y
- równanie wyjścia
0.0
u (t)
0.0
1.0
2.0
y (t)
-2.0
-3.0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
46
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Przykład modelu silnika prądu stałego obcowzbudnego
Spróbujemy najpierw zbudować schemat blokowy dla modelu
nieliniowego stacjonarnego rozważanego silnika
d t
J
Giw t it t D t M oz t
dt
diw t
Lw
u w t Rwiw t
dt
dit t
Lt
ut t Rt it t Giw t t
dt
Poszukujemy zachowania się rozważanego systemu w przedziale
czasu [0,t), dla warunków początkowych
0 0 , iw 0 iw0 it 0 it 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
47
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy pierwsze równanie
d t
J
Giw t it t D t M oz t
dt
i w t
it t
M oz t
Kazimierz Duzinkiewicz, dr hab. inż.
0 0
0 0
Transformacja
sygnałów w części
mechanicznej
systemu
t
Katedra Inżynierii Systemów Sterowania
48
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Podstawowy element: całkowanie funkcji w przedziale [0,t] z warunkiem
początkowym
iW E 0
iW E
iW E
Transformację sygnałów w części mechanicznej możemy przedstawić:
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
49
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
d t 1
Giw t it t D t M oz t
dt
J
0 0
0 0
iw t
it t
G
M oz t
- -
1 t
J
t
D
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
50
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy drugie równanie
diw t 1
uw t Rwiw t
dt
Lw
i w 0 iw 0
i w 0 iw 0
uw t
Transformacja
sygnałów w części
elektrycznej –
obwód wzbudzenia
systemu
uw t
iw t
i w 0 iw 0
-
1 iw t
Lw
iw t
Rw
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
51
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy trzecie równanie
dit t 1
ut t Rt it t Giw t t
dt
Lt
it 0 it 0
u t t
iw t
t
Kazimierz Duzinkiewicz, dr hab. inż.
it 0 it 0
Transformacja
sygnałów w części
elektrycznej –
obwód twornika
systemu
it t
Katedra Inżynierii Systemów Sterowania
52
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
dit t 1
ut t Rt it t Giw t t
dt
Lt
it 0 it 0
it 0 it 0
iw t
t
G
ut t
-
-
1
Lt
itt
it t
Rt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
53
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zestawimy schemat całego modelu
i w 0 iw 0
uw t
-
iw t
iw t
1 iw t
Lw
Rw
it 0 it 0
ut t
iw t
t
-
-
G
it t
it t
1 itt
Lt
Rt
0 0
M oz t
iw t
it t
Kazimierz Duzinkiewicz, dr hab. inż.
G
-
1
J
t
t
t
D
Katedra Inżynierii Systemów Sterowania
54
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Silnik – obiekt/system sterowany
Cel sterowania – np. utrzymanie określonej prędkości kątowej silnika,
określonej wcześniej: stałej – sterowanie stałowartościowe, zmiennej w
czasie – sterowanie programowe, nie znanej wcześniej, podawanej na
bieżąco – sterowanie nadążne
Wielkości wyjściowe obiektu
Wielkość sterowana – należy do jednej z klas wielkości wyjściowych
obiektu sterowanego
Przyjmijmy: wielkość sterowana – prędkość kątowa silnika
Pozostałe obserwowane wielkości wyjściowe – wielkości pomocnicze
Zatem: wielkości pomocnicze – prąd wzbudzenia, prąd twornika
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
55
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Silnik – obiekt/system sterowany – c.d.
Wielkości wejściowe obiektu
Poszukiwanie wielkości sterującej; jakie wielkości wejściowe wpływają na
prędkość kątową silnika
Moment oporowy zewnętrzny – wielkość zakłócająca
Napięcie twornika, napięcie wzbudzenia? – kandydaci na wielkość
sterującą
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
56
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Graficzna reprezentacja systemów dynamicznych –
schematy blokowe
Poglądowym narzędziem przedstawiania systemów dynamicznych są
schematy blokowe – dotyczy to szczególnie systemów stacjonarnych,
zarówno liniowych jak i nieliniowych
Schemat
blokowy
obrazuje
informacji/sygnałów w systemie
przepływ
i
transformacje
Budowa schematu blokowego korzysta z kilku symboli podstawowych,
a zbudowany schemat może być narzędziem pomocniczym w analizie
systemu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
57
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Graficzna reprezentacja systemów dynamicznych –
schematy blokowe
Symbole podstawowe:
iWE
Opis sposobu
przetwarzania
iWY
iP
Element systemu: przetwarzanie
informacji wejściowej w informację
wyjściową
Droga przesyłania informacji
iP
iP
iP
Kazimierz Duzinkiewicz, dr hab. inż.
Węzeł zaczepowy: rozsyłanie tej
samej informacji do różnych
elementów systemu lub do
otoczenia
Katedra Inżynierii Systemów Sterowania
58
Teoria sterowania SN
iA
Schematy analogowe i blokowe, realizowalność modeli stanu
iC
-
iB
Węzeł sumacyjny: sumowanie
algebraiczne sygnałów dochodzących z
różnych elementów systemu lub z
otoczenia
iC i A iB
iA
iC
-
Węzeł mnożący: mnożenie algebraiczne
sygnałów dochodzących z różnych
elementów systemu lub z otoczenia
iB
iC iA iB iAiB
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
59
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Technologię budowania schematu blokowego pokażemy na kilku
przykładach
Opis sposobu przetwarzania użyty w symbolu
elementu systemu może mieć różny charakter
charakterystyka statyczna – dla elementu
statycznego nieliniowego
Opis sposobu
WE przetwarzania
i
iWY
transmitancja operatorowa lub widmowa –
dla elementu dynamicznego liniowego
stacjonarnego
szkicowa charakterystyka skokowa lub
impulsowa – dla elementu dynamicznego
liniowego stacjonarnego
Kazimierz Duzinkiewicz, dr hab. inż.
szkicowa charakterystyka częstotli wościowa – dla elementu dynamicznego
liniowego stacjonarnego
Katedra Inżynierii Systemów Sterowania
60
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zadania – budowanie schematu blokowego w oparciu o zależności opisu
systemu sterowania
Zadanie 1: Działanie systemu sterowania opisane jest następującymi
zależnościami:
x3 K 3 x 2
x1 u x3
x2 K 1 x1
x4 K 4 x 2
y x4 x5
x5 K 2 x 2
Narysuj schemat blokowy tego układu sterowania
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
61
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Rozwiązanie
u
x1 u x3
x1
-
x3
x2 K1 x1
x3 K 3 x 2
x4 K 4 x 2
x5 K 2 x 2
Kazimierz Duzinkiewicz, dr hab. inż.
x1
x2
K1
x 2x
x2
2
x2
Katedra Inżynierii Systemów Sterowania
62
Teoria sterowania SN
x3 K 3 x2
Schematy analogowe i blokowe, realizowalność modeli stanu
x3
x4 K 4 x 2
x2
x5 K 2 x 2
x2
K3
x2
K4
x4
K2
x5
x5
y x4 x5
Kazimierz Duzinkiewicz, dr hab. inż.
x4
-
y
Katedra Inżynierii Systemów Sterowania
63
Teoria sterowania SN
u
-
x1
Schematy analogowe i blokowe, realizowalność modeli stanu
K1
x2
x 2x
2
K2
x5
K4
x4
x2
x3
y
K3
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
64
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
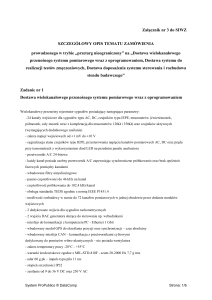
Zadanie: Utrzymać napięcie zasilania odbiorników w sieci prądu stałego na
stałym, zadanym poziomie Uo=24V
Wielkości zakłócające
Zaproponowane rozwiązanie
ωm
Φk
Φw
Iw
E
Rz
Ik
U
Io
K5 Uε Uo
Wielkość sterująca
-
Obiekt sterowany
Wielkość sterowana
Układ sterujący
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
65
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zależności
U E Rz I o
E K 1 m
W K
W K 2 I w , K K 4 I k
I k K5U
U U o U
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
66
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dostępna wiedza o
obiekcie sterowanym
Wielkości
zakłócające
Wartość
pożądana
wielkości
sterowanej
U0
W przykładzie
E I w , I k U ,U o
Kazimierz Duzinkiewicz, dr hab. inż.
I o ,m
System
sterowany
System
sterujący
W przykładzie
W przykładzie:
Wielkość
sterująca
Wielkość
sterowana
W przykładzie
U
Układ zamknięty sterowania
(ze sprzężeniem zwrotnym)
Katedra Inżynierii Systemów Sterowania
67
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Przykład – sterowanie napięciem zasilania –schemat blokowy
Symbole z falką - zmienne
Opis działania:
Schemat blokowy:
~
Iz
~ ~
~
U E RI z
R
~
E
~
~
~
E K1m
Kazimierz Duzinkiewicz, dr hab. inż.
~
- U~
~m
K1
~
E
Katedra Inżynierii Systemów Sterowania
68
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
~
~
~
~
w
w k
~
w K2 I w
~
~
k K5 I k
~
Kazimierz Duzinkiewicz, dr hab. inż.
~
+
~
k
~
Iw
~
K2
~
k
K5
w
~
Ik
Katedra Inżynierii Systemów Sterowania
69
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Schemat blokowy systemu sterowanego - prądnicy
~
Iz
~m
~
Iw
R
~
K2
w
~
+
K1
~
E
~
k
~
Iw
~
Ik
Kazimierz Duzinkiewicz, dr hab. inż.
~ ~ ~
~
U f 1 m , I z , I w , I k
~
U
~
Ik
K5
~m
~
Iz
-
~
U
Katedra Inżynierii Systemów Sterowania
70
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Opis działania systemu sterowanego - prądnicy
~ ~
~
U E RI z
~
~~
E K 1 m
~ ~
~
w k
~
~
w K2Iw
~
~
k K5Ik
(1)
(2)
(3)
(4)
(5)
Podstawiając kolejno (2) – (5) do (1) otrzymamy opis
zależności wejście – wyjście prądnicy
~
~
~
~
~
~
U K1 K 2m I w K1 K5m I k RI z
(6)
Opis działania prądnicy nieliniowy
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
71
Teoria sterowania SN
Jeżeli
~
Iw
Schematy analogowe i blokowe, realizowalność modeli stanu
~m
~m m const
~
stałe, czyli
Iz
R
~
K2
w
~
+
K
1 m
~
E
~
k
~
Ik
K5
~
Iz
~
Iw
~
Ik
Kazimierz Duzinkiewicz, dr hab. inż.
~ ~ ~
U f2 I z ,I w ,Ik
~
U
~
U
Katedra Inżynierii Systemów Sterowania
72
Teoria sterowania SN
~ ~
~
U E RI z
~
~
E K 1 m
~ ~
~
w k
~
~
w K2Iw
~
~
k K5Ik
Schematy analogowe i blokowe, realizowalność modeli stanu
(1)
(2a)
(3)
(4)
(5)
~
~
~
~
U K1 K 2m I w K1 K5m I k RI z
(6a)
Opis działania liniowy
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
73
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
~m var
~
Iz
Schemat blokowy systemu sterowania
~m
~
Iw
R
~
K2
w
~
+
K1
~
E
~
k
~
Ik
K5
~
~ ~
U U0 U
~
U
~
~ U0
U
Kazimierz Duzinkiewicz, dr hab. inż.
~
U
~
~
I k K 4U
~
Ik
+
Katedra Inżynierii Systemów Sterowania
K4
~
U
74
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Schemat blokowy systemu sterowania
~m
~
Iw
R
~
K2
w
~
+
~
k
~
Ik
K5
~m
~
Iz
~
Iw
~
U0
Kazimierz Duzinkiewicz, dr hab. inż.
~m var
~
Iz
~
E
K1
~ ~
~ ,~
U f3
I
,
m
z I w ,U 0
~ U
K4
~
U
-
~
U
+
~
U0
~
U
Katedra Inżynierii Systemów Sterowania
75
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Opis działania
~
~
~
~
~
~
U K1 K 2m I w K1 K5m I k RI z
~
~ ~
U U0 U
~
~
I k K 4U
(6)
(7)
(8)
Podstawiając kolejno (7) – (8) do (6) otrzymamy opis zależności
wejście – wyjście systemu sterowania
~
~
~
~
K 1 K 2 m I w
K 1 K 5 K 4 mU 0
~
U
~
~
1 K 1 K 5 K 4 m 1 K 1 K 5 K 4
m
(9)
~
RI z
~
1 K 1 K 5 K 4
m
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
76
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Schemat blokowy systemu sterowania
~
Iw
R
~
K2
~m m const
~
Iz
~
w
+
K
1 m
~
E
~
k
~
Ik
K5
~
~ ~
U U0 U
~
~ - U U~
U
0
Kazimierz Duzinkiewicz, dr hab. inż.
~
~
I k K 4U
~
U
~
Ik
+
Katedra Inżynierii Systemów Sterowania
K4
~
U
77
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Schemat blokowy systemu sterowania
~
Iw
R
~
K2
w
~m m ~ const
Iz
~
E
~
+
K
1 m
~
k
K5
~
Ik
K4
~
Iz
~
Iw
~
U0
Kazimierz Duzinkiewicz, dr hab. inż.
~ ~ ~
U f 4 I z , I w ,U 0
~
U
~
~ - U U~
U
0
+
~
U
Katedra Inżynierii Systemów Sterowania
78
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Opis działania
~
~
~
~
U K1 K 2m I w K1 K5m I k RI z
~
~ ~
U U0 U
~
~
I k K 4U
(6a)
(7)
(8)
Podstawiając kolejno (7) – (8) do (6a) otrzymamy opis zależności
wejście – wyjście systemu sterowania
~
~
K 1 K 2 m I w
K 1 K 5 K 4 mU 0
~
U
1 K 1 K 5 K 4 m 1 K 1 K 5 K 4 m
(9a)
~
RI z
1 K 1 K 5 K 4 m
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
79
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Rozważymy teraz model zlinearyzowany silnika PS i wybierzemy opis za
pomocą transmitancji operatorowej – zbudujemy schemat blokowy
transmitancyjny
d t
Giw0 it t Git 0 iw t D t M oz t
dt
diw t
Lw
u w t Rw iw t
dt
dit t
Lt
ut t Rt it t Giw0 t G0 iw t
dt
J
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
80
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Powracamy do przykładu z silnikiem PS
Niech
L t s
Lit t I t s
Liw t I w s
LM oz t M oz s
Lut t U t s
Lu w t U w s
Poddamy transformacji Laplace’a każde z równań, przy zerowych
warunkach początkowych
Warto pamiętać, że
Linearyzacja w otoczeniu punktu równowagi gwarantuje zerowe warunki
początkowe
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
81
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy pierwsze równanie i poddajmy je transformacji Laplace’a
d t
J
Giw0 it t Git 0 iw t D t M oz t
dt
Otrzymamy
Js s Giw0 I t s Git 0 I w s D s M oz s
D Js s Giw0 I t s Git 0 I w s M oz s
1
Giw0 I t s Git 0 I w s M oz s
D Js
1
s D Giw0 I t s Git 0 I w s M oz s
J
1 s
D
s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
82
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
1
s D Giw0 I t s Git 0 I w s M oz s
J
1 s
D
I t s
Gi w 0
I w s
Gi t 0
-
1
D
J
1 s
D
s
M oz s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
83
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy drugie równanie i poddajmy je transformacji Laplace’a
diw t
Lw
u w t Rw iw t
dt
Otrzymamy
Lw sI w s U w s Rw I w s
1
I w s
U w s
Rw Lw s
1
Rw
I w s
U w s
Lw
1
s
Rw
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
84
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
1
Rw
I w s
U w s
Lw
1
s
Rw
U w s
Kazimierz Duzinkiewicz, dr hab. inż.
1
Rw
L
1 w s
Rw
I w s
Katedra Inżynierii Systemów Sterowania
85
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy w końcu trzecie równanie modelu i poddajmy je transformacji
Laplace’a
dit t
Lt
ut t Rt it t Giw0 t G0 iw t
dt
Otrzymamy
Lt sI t s U t s Rt I t s Giw0 s G0 I w s
Rt Lt s I t s U t s Giw0s G0 I w s
I t s
1
U t s Giw0s G0 I w s
Rt Lt s
1
Rt
U t s Giw0s G0 I w s
I t s
Lt
1 s
Rt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
86
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
1
Rt
I t s
U t s Giw0 s G0 I w s
L
1 t s
Rt
s
I w s
Gi w 0
-
G0
-
1
Rt
Lt
1 s
Rt
I t s
U t s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
87
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zestawimy schemat całego modelu
U w s
U t s
1
Rw
L
1 w s
Rw
I w s
I w s
s
I w s
G 0
Gi w 0
M oz s
Kazimierz Duzinkiewicz, dr hab. inż.
-
1
I t s
Rt
L
1 t s
Rt
I t s
I w s
Gi t 0
I t s
Gi w 0
-
Katedra Inżynierii Systemów Sterowania
1
D
J
1 s
D
s
88
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Model obiektu/systemu typu wejście-wyjście wyrażony za pomocą
transmitancji
operatorowych
można
oczywiście
stosować
dla
obiektów/systemów wielowymiarowych
Zastosujemy tą formę reprezentacji modelu systemu do rozważanego
systemy
- modelu procesów elektromechanicznych silnika
obcowzbudnego prądu stałego
Niech
U 1 s
U s U j s
U s
s
Y1 s
Y s Yi s
Y s
l
wektory transformat wielkości wejściowych i wyjściowych
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
89
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dla systemu wielowymiarowego liniowego i stacjonarnego wprowadza się
macierz transmitancji operatorowych
G11
G s Gi 1
G
l1
G1 j G1s
Gij Gis
Glj Gls
Model obiektu/systemu typu wejście-wyjście wyrażony za pomocą
transmitancji operatorowych ma wówczas postać
Y s Gs U s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
90
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dla rozważanego modelu silnika, możemy zapisać
Gw w
G s Gt w
G
w
gdzie
Gwt
Gt t
G t
Gw M
U w s
Gt M U s U t s
M s
oz
G M
I w s
Y s I t s
s
I w s
U w s
I w s
Gwt s
U t s
Gw M s
I s
Gt w s t
U w s
I s
Gt t s t
U t s
I t s
Gt M s
M oz s
s
G w s
U w s
s
G t s
U t s
G w w s
Kazimierz Duzinkiewicz, dr hab. inż.
G M s
I w s
M oz s
s
M oz s
Katedra Inżynierii Systemów Sterowania
91
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Poszczególne elementy macierzy określa się korzystając z liniowości
systemu (spełnianie zasady superpozycji)
Nietrudno, w oparciu o schemat blokowy stwierdzić
1
I s
Rw
Kw
Gw w s w
U w s 1 Lw s 1 Tw s
Rw
Gw t s
Kw
gdzie
L
1
, Tw w
Rw
Rw
I w s
0
U t s
Gw M s
Kazimierz Duzinkiewicz, dr hab. inż.
I w s
0
M oz s
Katedra Inżynierii Systemów Sterowania
92
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Jeżeli wybrać za wielkość sterującą napięcie twornika ut(t), to najbardziej
interesującymi transmitancjami będą transmitancje w torach
G t s
s
G M s
U t s
s
M oz s
Ustalmy określające je wyrażenia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
93
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
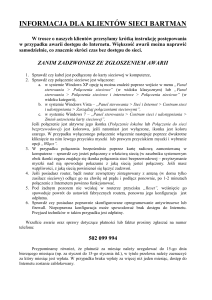
Odpowiedni fragment schematu blokowego dla toru: prędkość kątowa –
napięcie twornika
U t s
Gi w 0
-
1
Rt
L
1 t s
Rt
Gi w 0
1
D
J
1 s
D
s
Struktura: pętla ujemnego sprzężenia zwrotnego
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
94
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Tor główny
U t s
1
Rt
L
1 t s
Rt
Gi w 0
1
D
J
1 s
D
s
Tor sprzężenia zwrotnego
-
Gi w 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
95
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Otrzymamy
Giw0
Giw0
Rt D
Rt D
L
L
J
J
Giw0
1 t s 1 s
1 t s 1 s
Rt
D
Rt
D
Rt D
G t s
2
2
Giw0 2
Lt
Lt
J Giw0
J Giw0
1 s 1 s
1 s 1 s
Rt D
R
D
R
D
Rt
D
Rt D
t
t
1
L
J
L
J
1 t s 1 s
1 t s 1 s
Rt
D
Rt
D
Giw0
Giw0
Rt D
Rt D
2
2
Lt
J Giw0
Lt J 2 Lt J Giw0
1 s 1 s
s s 1
R
D
R
D
R
D
R
D
R
D
t
t
t
t
t
Tor: prędkość kątowa – napięcie twornika ma cechy układu drugiego rzędu
K p 02
Kp
Y( s )
G2 rz ( s )
U ( s ) s 2 2 0 s 02 T02 s 2 2 T0 s 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
T0
1
0
96
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Odpowiedni fragment schematu blokowego dla toru: prędkość kątowa –
moment obciążenia zewnętrznego
Gi w 0
-
1
Rt
L
1 t s
Rt
Gi w 0
-
M oz s
1
D
J
1 s
D
s
Struktura: pętla ujemnego sprzężenia zwrotnego
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
97
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Tor główny
M oz s
-
s
1
D
J
1 s
D
Tor sprzężenia zwrotnego
-
Gi w 0
Kazimierz Duzinkiewicz, dr hab. inż.
1
Rt
L
1 t s
Rt
Gi w 0
Katedra Inżynierii Systemów Sterowania
98
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Otrzymamy
1
1
D
D
J
J
1 s
1 s
D
D
G M s
2
2
Giw0
Giw0 1 Lt
L
J
1 t s 1 s
Rt D
Rt
D
Rt D
Rt
1
L
J
L
J
1 t s 1 s
1 t s 1 s
Rt
D
Rt
D
L
1
1 t
D
Rt
s
2
J Giw0
s 1 s
D
Rt D
L
L
1
1
1 t s
1 t s
D
Rt
D
Rt
2
2
Lt
J Giw0
Lt J 2 Lt J Giw0
1 s 1 s
s s 1
Rt
D
Rt D
Rt D
Rt D
Rt D
Tor: prędkość kątowa – moment oporowy zewnętrzny ma cechy układu drugiego
rzędu z takim samym równaniem charakterystycznym jak tor prędkość kątowa
– napięcie twornika
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
99
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Częściowo wypełniliśmy macierz transmitancji G(s)
Gw w
G s Gt w
G
w
Gw t
Gt t
G t
1
R
w
1 Lw s
Rw
Gt w
G w ?
Gw M
Gt M
G M
0
Gt t ?
Giw0
Rt D
2
Lt J 2 Lt J Giw0
s s 1
Rt D
Rt D
Rt D
Kazimierz Duzinkiewicz, dr hab. inż.
0
Gt M ?
L
1
1 t s
D
Rt
2
Lt J 2 Lt J Giw0
s s 1
Rt D
Rt D
Rt D
Katedra Inżynierii Systemów Sterowania
100
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dalej wprowadźmy następujące założenia
Przyjmijmy, że napięcie wzbudzenia posiada stałą wartość lub nawet
założenie, że załączane jest na stałą wartość na tyle wcześniej przed
momentem zmian innych wejść systemu, że ustaną w tej części systemu
przebiegi przejściowe. Prowadzi to do:
* silnik jest systemem liniowym stacjonarnym, ale
* uzyskany przy poprzednich założeniach model transmitancyjny ulega
zmianie
Powód drugiej zmiany – napięcie uw(t) nie spełnia warunku L1 stosowania
przekształcenia Laplace’a
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
101
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Prześledźmy te zmiany
Jeżeli ustalona wartość napięcia wzbudzenia wynosi
U wn
to oznaczając odpowiadającą tej wartości napięcia wzbudzenia wartość
prądu wzbudzenia
I wn
U wn
Rw
Otrzymamy model
d t
J
GI wn it t D t M oz t
dt
di t
Lt t ut t Rt it t GI wn t
dt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
102
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dla uproszczenia oznaczmy
GI wn K wn
wówczas
J
d t
K wn it t D t M oz t
dt
dit t
Lt
ut t Rt it t K wn t
dt
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
103
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy pierwsze równanie i poddajmy je transformacji Laplace’a
d t
J
K wn it t D t M oz t
dt
Otrzymamy
Jss K wn I t s Ds M oz s
D Js s K wn I t s M oz s
s
1
K wn I t s M oz s
D Js
1
Km
K wn I t s M oz s
s D K wn I t s M oz s
J
1 Tm s
1 s
D
1
gdzie
Kazimierz Duzinkiewicz, dr hab. inż.
Km
Katedra Inżynierii Systemów Sterowania
D
, Tm
J
D
104
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
s
I t s
Km
K wn I t s M oz s
1 Tm s
K wn
-
Km
1 Tm s
s
M oz s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
105
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Weźmy drugie równanie i poddajmy je transformacji Laplace’a
Lt
dit t
ut t Rt it t K wn t
dt
Otrzymamy
Lt sI t s U t s Rt I t s K wn s
Rt Lt s I t s U t s K wn s
1
U t s K wn s
I t s
Rt Lt s
1
Rt
Kt
U t s K wn s
I t s
U t s K wn s
Lt
1 Tt s
1 s
Rt
gdzie
Kazimierz Duzinkiewicz, dr hab. inż.
Lt
1
K t , Tt
Rt
Rt
Katedra Inżynierii Systemów Sterowania
106
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
I t s
s
Kt
U t s K wn s
1 Tt s
K wn
-
Kt
1 Tt s
I t s
U t s
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
107
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Zestawimy schemat całego modelu
U t s
s
K wn
M oz s
Kazimierz Duzinkiewicz, dr hab. inż.
-
Kt
1 Tt s
I t s
I t s
I t s
K wn
-
Katedra Inżynierii Systemów Sterowania
1
D
J
1 s
D
s
108
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Nietrudno spostrzec, że mimo zmian modelu transmitancyjnego
systemu, struktura transmitancji w torach : prędkość kątowa –
napięcie twornika oraz prędkość kątowa – moment oporowy
zewnętrzny pozostają niezmienione (ćwiczenie własne – pokazać to)
Inne ćwiczenie:
Dla schematu
transmitancji
z
Gt t
G s
G t
gdzie
poprzedniego
Gt M
G M
I t s
Gt t s
U t s
s
G t s
U t s
Kazimierz Duzinkiewicz, dr hab. inż.
slajdu
policzyć
całą
macierz
U t s
I t s
Y s
U s
s
M oz s
Gt M s
I t s
M oz s
G M s
s
M oz s
Katedra Inżynierii Systemów Sterowania
109
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Wprowadzimy jeszcze jedno uproszczenie
Jeżeli nie interesować się przebiegami prądu twornika, uzyskamy
prosty model liniowy stacjonarny silnika jako obiektu sterowanego
prędkości kątowej z jednym wejściem sterującym, jednym wejściem
zakłócającym i jednym wyjściem
U t s
M oz s
Kazimierz Duzinkiewicz, dr hab. inż.
G t s
s
G M s
Katedra Inżynierii Systemów Sterowania
110
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Lub bardziej szczegółowo
M oz s
U t s
-
Kt
1 Tt s
I t s
K wn
s
Km
1 Tm s
K wn
Gs G t
G M
U t s
U s
M oz s
Y s s
gdzie
s
G t s
U t s
Kazimierz Duzinkiewicz, dr hab. inż.
s
G M s
M oz s
Katedra Inżynierii Systemów Sterowania
111
Teoria sterowania SN
Schematy analogowe i blokowe, realizowalność modeli stanu
Dziękuję
– koniec materiału prezentowanego podczas wykładu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
112