Dorota STACHOWIAK, Andrzej DEMENKO, Lech NOWAK
Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej
Siatkowa reprezentacja polowych form opisu momentu
elektromagnetycznego
Streszczenie. W pracy przedstawiono równoważne metody sieci magnetycznych (reluktancyjnych i permeancyjnych) stosowanych do analizy
maszyn elektrycznych. Szczególną uwagę zwrócono na procedury obliczania momentu elektromagnetycznego. Wyjściowe postacie wzorów
opisujących moment elektromagnetyczny wyznaczono na podstawie zmian energii (koenergii) magnetycznej. Uzyskane wzory są numeryczną
reprezentacją całki z tensora naprężeń. Przedstawiono przykładowe wyniki obliczeń momentu zaczepowego.
Abstract. The paper considers the methods of equivalent magnetic networks that are used in the analysis of electrical machine performance. Both
the permeance and reluctance networks are discussed. Attention is paid to the algorithms of electromagnetic torque calculation. The virtual work
principle is applied. The principle is adapted to the discrete network models. As a result the network representations of Maxwell’s stress formula are
proposed. The formulas are applied in the calculations of cogging torque. (Electromagnetic torque calculation using permeance and reluctance
network methods).
Słowa kluczowe: metoda elementów skończonych, moment elektromagnetyczny, siatka permeancyjna, siatka reluktancyjna.
Keywords: Finite element analysis, Magnetic fields, Electromagnetic torque, Permeance network, Reluctance network.
Wstęp
Do komputerowych metod analizy pola magnetycznego
można
zaliczyć
metody
sieci
reluktancyjnych
i
permeancyjnych, które wywodzą się z obwodowych
schematów zastępczych [1-3]. Współczesne odpowiedniki
siatek bazują na metodzie elementów skończonych (MES).
Równania metody elementów skończonych odpowiadają
równaniom oczkowym i węzłowym siatek magnetycznej i
elektrycznej
[4-6].
Równania
metody
elementów
krawędziowych
(MEK)
dla
ujęć
wykorzystujących
wektorowy potencjał A odpowiadają równaniom oczkowym
siatki reluktancyjnej. Równania opisujące wartości
skalarnego potencjału Ω dla elementów węzłowych
odpowiadają równaniom węzłowym siatki permeancyjnej.
W pracy przedstawiono procedury obliczania momentu
elektromagnetycznego na podstawie rozwiązań równań
węzłowych i oczkowych dla siatek magnetycznych.
Rozpatrzono zmiany energii i koenergii magnetycznej
wywołane wirtualnym przesunięciem siatki dyskretyzującej
obszar wirnika maszyny elektrycznej. Przyjęto, że w
procesie dyskretyzacji układu w szczelinie powietrznej
zostało utworzone pasmo o jednorodnych elementach.
Pasmo to oddziela obszar stojana od obszaru wirnika.
Siatka permeancyjna
Siatkowy model permeancyjny (SP) można utworzyć
stosując klasyczne obwodowe podejście [1, 3] lub MES i
funkcje elementu krawędziowego [4, 6]. Równania MES dla
ujęć wykorzystujących potencjał skalarny Ω odpowiadają
równaniom węzłowym siatki permeancyjnej złożonej z
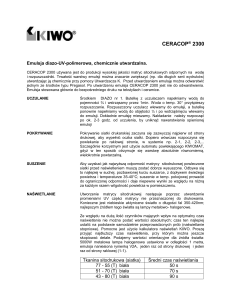
obwodowych modeli elementów o grafie krawędziowym. W
permeancyjnych modelach elementów gałęzie są
przyporządkowane krawędziom – rysunek 1a. Gałęziowe
siły magnetomotoryczne (smm) są reprezentowane przez
krawędziowe
wartości
wektorowego
potencjału
elektrycznego T [4]. W odróżnieniu od klasycznych modeli
siatkowych w SP występują permeancje wzajemne.
Oznacza to, że strumień w gałęzi przyporządkowanej
krawędzi elementu jest wywołany nie tylko przez napięcie
na permeancji tej gałęzi, ale także przez napięcia na
permeancjach pozostałych gałęzi siatki. Na rysunku 1a
pokazano permeancje wzajemne dla gałęzi P5P6. W
klasycznych modelach siatkowych permeancje wzajemne
nie występują. Równania gałęziowe i węzłowe siatki
permeancyjnej zestawiono w tablicy 1.
Siatka reluktancyjna
Siatkę reluktancyjną (SR) można otrzymać stosując
metodę
elementów
krawędziowych
dla
ujęć
wykorzystujących magnetyczny potencjał wektorowy [6]. W
reluktancyjnym
modelu
elementu
gałęzie
są
przyporządkowane odcinkom łączącym środki ścianek ze
środkiem ciężkości elementu. Model reluktancyjny elementu
przedstawiono na rysunku 1b.
Rys.1. Element sześciościenny: (a) model permeancyjny (b) model
reluktancyjny
PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 84 NR 6/2008
149
W siatce reluktancyjnej strumieniom gałęziowym
odpowiadają wielkości ściankowe wektora indukcji
magnetycznej w elemencie. Strumień oczkowy ϕi,j jest
wielkością krawędziową potencjału A dla krawędzi PiPj – tej
elementu. Reluktancje gałęziowe oblicza się na podstawie
funkcji interpolacyjnych elementu ściankowego. W
odróżnieniu od klasycznej SR, w siatce utworzonej na
podstawie MEK występują reluktancje wzajemne.
Niezerowe sprzężenia wzajemne dla reluktancyjnego
modelu elementu prostopadłościennego pokazano na
rysunku 1b. Równania gałęziowe i oczkowe siatki
reluktancyjnej zestawiono w tablicy 1. Gałęziowe siły
magnetomotoryczne wyrażono za pomocą krawędziowych
wartości wektorowego potencjału elektrycznego T. W SR w
celu wyznaczenia oczkowych smm nie trzeba najpierw
obliczać smm gałęziowych. Smm oczkowe w siatce
reluktancyjnej można bowiem określić na podstawie
wielkości ściankowych wartości gęstości J.
Tabela 1. Równania siatki magnetycznej
Równania węzłowe
Równania
Podstawienie
lub oczkowe
gałęziowe
Siatka
permeancyjna φ g =Λ ( uΩ + Θ ) uΩ = k n Ω
k nT Λk n Ω = − k nT ΛΘ
(SP)
Siaka
reluktancyjna uΩf =Rμ φ f − Θ φ f = k e ϕ
k eT Rμ ke ϕ = keT Θ
(SR)
Ω - wektor potencjałów węzłowych, Λ - macierz permeancji
gałęziowych, kn - transponowana macierz węzłowa siatki
permeancyjnej, ϕ - wektor strumieni oczkowych, Rμ - macierz
reluktancji gałęziowych, ke - transponowana macierz oczkowa siatki
reluktancyjnej, Θ - wektor gałęziowych sił magnetomotorycznych.
Rodzaj siatki
Obliczanie momentu na podstawie rozwiązań równań
węzłowych siatki permeancyjnej
Moment elektromagnetyczny został obliczony na
podstawie zasady prac wirtualnych. Zgodnie z tą zasadą,
dla
metody
potencjału
skalarnego,
moment
elektromagnetyczny T jest równy pochodnej koenergii
magnetycznej Wc względem kąta obrotu α [7]. W celu
wyznaczenia momentu działającego na wirnik w położeniu
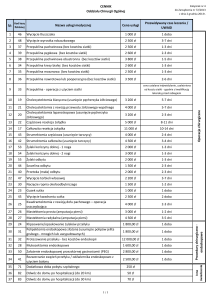
α utworzono wielomian interpolacyjny, opisujący koenergię
układu w funkcji wirtualnego przesunięcia Δα wirnika [8].
Zastosowano wielomian interpolacyjny Lagrange’a oparty
na danych dla trzech położeń αi=α+iβ (i=−1, 0, 1); gdzie β
jest kątem pomiędzy sąsiednimi węzłami pasma (rys. 2).
Moment elektromagnetyczny w położeniu α wyznaczono
na podstawie pochodnej funkcji Wc(α+Δα) względem
przesunięcia Δα (dla Δα → 0), a więc
(1)
T (α ) =
∂Wc (α + Δα)
1
=
(Wc (α + β) − Wc (α − β))
∂ ( Δα )
2β
Δα = 0
gdzie: Wc(α±β) – wartości koenergii w położeniach α±β.
Po wykorzystaniu symboli przedstawionych na rysunku 2, z
zależności (1) otrzymuje się:
(2)
T (α ) =
{
}
n
1
Λ p ∑ (Ω si − Ωi +1 ) 2 − (Ω si − Ωi −1 ) 2 =
4β
i =1
=
n
1
Λ p ∑ (Ω si − Ωi )(Ωi −1− Ωi +1 )
2β
i =1
W przypadku trójwymiarowego wielowarstwowego
modelu wzór (2) opisuje składnik momentu, odnoszący się
do pojedynczej warstwy trójwymiarowego modelu SP.
Moment dla trójwymiarowego modelu SP złożonego z m
warstw można zapisać następująco:
(3)
n
1 m
Λ p , q ∑ (Ω sq , i − Ω q , i )(Ω q , i −1 − Ω q , i +1 )
∑
2β q =1
i =1
T (α ) =
gdzie index q oznacza permeancje i potencjały odnoszące
się do q-tej warstwy.
Obliczanie momentu na podstawie rozwiązań równań
oczkowych siatki reluktancyjnej
Formułę opisującą moment dla SR otrzymano stosując
podejście typowe dla ujęć wykorzystujących magnetyczny
potencjał wektorowy [10]. Rozpatrzono pochodną energii
magnetycznej W względem kąta obrotu α [7]. Dla układu
dwuwymiarowego otrzymano następującą formułę:
(4)
Moment obliczany w ten sposób można traktować jako
numeryczną formę zapisu całki z tensora naprężeń
Maxwella po powierzchni pasma dla dwuwymiarowego
modelu SP. Przy czym uzyskany wzór (2) różni się od
klasycznej formuły dla siatki permeancyjnej, np. od formuły
podanej w [3].
150
Rys.2. Siatkowy model permeancyjny pasma dla 3 położeń
dyskretnych wirnika
T (α) = −
=−
1
(W (α + β)− W (α − β)) =
2β
{
}
n
1
R p ∑ (ϕ si − ϕi+1) 2 −(ϕ si − ϕi−1) 2 =
4β i=1
=
n
1
R p ∑ (ϕi − ϕ si )(ϕi −1 − ϕi +1 )
2β i =1
PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 84 NR 6/2008
W powyższym równaniu W(α±β) to wartości energii w
położeniach α+β i α−β, pozostałe symbole pokazano na
rysunku 3. Siatkowy model reluktancyjny (rys. 3) utworzono
za pomocą MEK. Przedstawione na rysunkach 2 i 3
siatkowe modele pasma są identyczne.
T (α ) = −
(5)
−
n
1 ⎧⎪ m
2
2
⎨∑ R pq ∑ φψq , i +1 − φψq ,i −1
4β ⎪⎩q =1
i =1
(
n
1 ⎧⎪m −1
2
2
⎨ ∑ Rzq ∑ φ zq ,i +1 − φ zq ,i −1
4β ⎪⎩ q =1
i =1
(
)⎫⎪⎬
⎪⎭
)⎫⎪⎬.
⎪⎭
gdzie: φψi±1,q - wartość strumienia w gałęzi Ppq w położeniu
α±β, φzi±1,q - wartość strumienia w gałęzi Pzq w położeniu
α±β (patrz rysunek 4). Index q oznacza reluktancje i
strumienie gałęziowe odnoszące się do q-tej warstwy.
W algorytmach obliczeniowych strumienie gałęziowe
wyraża się za pomocą strumieni oczkowych (rys. 4), a
zatem wzór (5) można przekształcić do następującej
postaci:
T (α ) =
(6)
+
n
1 ⎧⎪ m
⎨∑ R p , q ∑ φψq ,i ϕ q , i −1 − ϕ q , i +1
2β ⎪⎩q =1
i =1
(
n
1 ⎧⎪m −1
⎨ ∑ Rz , q ∑ φ zq ,i ϕψq ,i −1 − ϕψq , i +1
2β ⎪⎩ q =1
i =1
(
⎫
)⎪⎬
⎪⎭
⎫
)⎪⎬
⎪⎭
Powyższy wzór jest numeryczną reprezentacją całki z
tensora naprężeń [11].
Rys.3. Siatkowy model reluktancyjny pasma dla 3 położeń
dyskretnych wirnika
W układzie trójwymiarowym, w obliczeniach momentu,
wzór (4) należy uzupełnić o dodatkowe składniki związane
ze strumieniami gałęziowymi przenikającymi przez
reluktancje znajdujące się w paśmie (reluktancje Rp i
reluktancje Rz w gałęziach prostopadłych do powierzchni
przedstawionej na rysunku 3).
Zazwyczaj w obliczeniach trójwymiarowych, w procesie
dyskretyzacji, korzystnie jest pasmo przejściowe pomiędzy
obszarem stojana a obszarem wirnika podzielić na
krzywokrawędziowe elementy prostopadłościenne lub na 9krawędziowe pryzmy. Krawędzie elementów są równoległe
do osi walcowego układu współrzędnych r, z, ψ. Pasmo o
długości l znajduje się w szczelinie powietrznej; gdzie l –
odległość pomiędzy płaszczyznami brzegowymi z=0, z=l
(ϕ(z=0)=0, ϕ(z=l)=0). Pasmo podzielono na warstwy o
grubości Δlq [10].
Dla modelu trójwymiarowego odpowiednik wzoru (4) ma
postać:
Rys.4. Fragment pasma z gałęzią Ppq (a) i gałęzią Pzq (b)
Przykład obliczeniowy
Przedstawione powyżej formuły zastosowano do
obliczenia momentu elektromagnetycznego silnika z
magnesami
trwałymi
(PMM).
Analizowano
silnik,
wzbudzany
magnesami
trwałymi
naklejonymi
na
powierzchni wirnika. Zastosowano model trójwymiarowy.
Siatki magnetyczne utworzono za pomocą MES. W
procesie dyskretyzacji rozpatrywany obszar podzielono na
krzywokrawędziowe elementy prostopadościenne i 9krawędziowe pryzmy [11] (całkowita liczba elementów ≈
200 000 na parę biegunów). Ten sam przykład
PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 84 NR 6/2008
151
zrealizowano z wykorzystaniem klasycznej metody
potencjału skalarnego. Do obliczeń pola magnetycznego i
momentu klasyczną metodą potencjału skalarnego
wykorzystano komercyjny pakiet obliczeniowy Opera 3D w
wersji 7.1. W przypadku obliczeń przy wykorzystaniu
pakietu Opera moment elektromagnetyczny wyznaczono
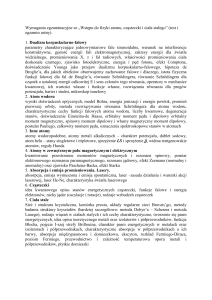
metodą tensora naprężeń magnetycznych Maxwella. Na
rysunku 5 przedstawiono wyniki obliczeń momentu
zaczepowego (wyniki uzyskane przy użyciu pakietu Opera3D oznaczono symbolem OPM). Dla położeń αi0 wirnika, w
których magnesy są rozmieszczone symetrycznie
względem żłobków stojana, a więc moment zaczepowy jest
równy zero, przedstawione w pracy metody dają dokładne
wyniki. Obliczone wartości momentu są równe zeru z
dokładnością do ósmego miejsca po przecinku. Mniej
dokładne są wyniki obliczeń uzyskane przy użyciu pakietu
Opera.
T cog [Nm]
1,5
obliczenia
0.5
0.0
-0.5
pomiar
-1.0
5.0
10.0
15.0
20.0
25.0 α [°] 30.0
Rys. 6. Zmierzone i obliczone przebiegi momentu zaczepowego
0,5
0,0
0
5
10
15
20
25 α [°] 30
SP
Przedstawione formuły można stosować zarówno w
metodzie elementów węzłowych dla ujęć wykorzystujących
potencjał skalarny jak i w metodzie elementów
krawędziowych dla ujęć wykorzystujących potencjał
wektorowy.
LITERATURA
SR
-1,5
Rys. 5. Wyniki obliczeń momentu zaczepowego
Z przeprowadzonych obliczeń wynika, że główną
przyczyną różnicy pomiędzy wynikami obliczeń momentu
metodą globalnego potencjału skalarnego, a metodą
potencjału wektorowego jest zbyt mała liczba pasm siatki
dyskretyzującej obszar szczeliny powietrznej. Dwukrotne
zwiększenie liczby pasm powoduje ponad dwukrotne
zmniejszenie różnicy pomiędzy obliczonymi wartościami
amplitud pierwszej harmonicznej funkcji T(α).
O skuteczności opracowanych procedur wyznaczania
momentu świadczy także porównanie wyników obliczeń i
pomiarów
momentu
zaczepowego.
Badano
ośmiobiegunowy silnik bezszczotkowy z magnesami
trwałymi naklejonymi na powierzchni wirnika. Rozpatrywany
silnik ma 24 żłobki, w których umieszczone zostały
uzwojenia dwuwarstwowe. Na rysunku 6 przedstawiono
porównanie wyników pomiarowych z wynikami obliczeń
uzyskanych po zastosowaniu formuły (6) będącej
numeryczną reprezentacją całki z tensora naprężeń.
Zgodność wyników obliczeń i pomiarów świadczy o dużej
dokładności zastosowanej metody obliczania momentu.
Wnioski
Zaproponowane
metody
wyznaczania
momentu
elektromagnetycznego można skutecznie zastosować w
trójwymiarowych
obliczeniach
wirujących
maszyn
elektrycznych. Przedstawione metody obliczania momentu
zapewniają bardzo dużą dokładność. Dla położeń wirnika,
dla których moment zaczepowy jak wynika z geometrii
układu jest równy zeru wartości obliczone na podstawie
przedstawionych metod były równe zeru z dokładnością do
8-go miejsca po przecinku. O skuteczności opracowanych
procedur wyznaczania momentu świadczy także przykład
152
1.0
0.0
1,0
-1,0
T cog [Nm]
1.5
-1.5
OPM
-0,5
obliczania momentu zaczepowego ośmiobiegunowego
bezszczotkowego silnika z magnesami trwałymi. Otrzymano
bowiem dużą zgodność wyników obliczeń z wynikami
pomiarów.
[1] O s t o v i c V . , Dynamics of saturated machines, SpringerVerlag, Berlin, (1989)
[2] S y k u l s k i J . , S t o l l J . , S i k o r a R . , P a w l u k K . ,
T u r o w s k i J . , Z a k r z e w s k i K . , Computational Magnetics,
Chapman & Hall, London, (1995)
[3] H e c q u e t M . , B r o c h e t P . , Time variation of forces in a
synchronous machine using electric coupled network model,
IEEE Trans. Magn., 34 (1998), n.5, 3214-17
[4] D e m e n k o A . , S y k u l s k i J . , Network equivalents of nodal
and edge elements in electromagnetics, IEEE Trans. Magn., 38
(2002), n.2, 1305-08
[5] D a v i d s o n J . , B a l c h i n M . , Three dimensional eddy
currents calculation using a network method, IEEE Trans.
Magn., 19 (1983), n.6, 2325-28
[6] D e m e n k o A . , N o w a k L . , S z e l a g W . , Reluctance
network formed by means of edge element method, IEEE
Trans. Magn., 34 (1998), n.5, 2485-88
[7] C o u l o m b J ., M e u n i e r G . , Finite element implementation of
virtual work principle for magnetic or electric force and torque
computation, IEEE Trans. Magn., 20 (1984), 1894 – 1896
[ 8 ] D e m e n k o A . , S t a c h o w i a k D . , Electromagnetic torque
calculation using magnetic network methods, COMPEL, 27
(2008), n.1, 17-26
[9] R e n Z . , Comparision of different force calculation methods in
3D finite element modelling, IEEE Trans. Magn., 30 (1994). n.5,
3471-3475.
[10] D e m e n k o A . , 3D edge element analysis of permanent
magnet motor dynamic, IEEE Trans. Magn., 34 (1998), n.5,
3620-3623
[11] S t a c h o w i a k D . , Edge element analysis of brushless motors
with inhomogeneously magnetized permanent magnets,
COMPEL, 23 (2004), n.4, 1119-28
Autorzy: dr inż. Dorota Stachowiak, Politechnika Poznańska,
Instytut Elektrotechniki i Elektroniki Przemysłowej, ul. Piotrowo 3A,
60-965 Poznań, E-mail: [email protected];
prof. dr hab. inż. Andrzej Demenko, Politechnika Poznańska,
Instytut Elektrotechniki i Elektroniki Przemysłowej, ul. Piotrowo 3A,
60-965 Poznań, E-mail: [email protected];
prof. dr hab. inż. Lech Nowak, Politechnika Poznańska, Instytut
Elektrotechniki i Elektroniki Przemysłowej, ul. Piotrowo 3A, 60-965
Poznań, E-mail: [email protected]
PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 84 NR 6/2008