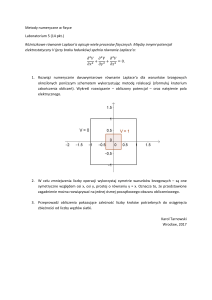
1. Metoda różnic skończonych
Znaleźć rozkład pola temperatury w pręcie (analiza 1D) w stanie ustalonym.
Parametry: wymiary geometryczne pręta, gęstość, ciepło właściwe i przewodność cieplna
materiału, moc wydzielana na jednym z końców pręta, warunek brzegowy na drugim z
końców pręta, parametry siatki
Znaleźć rozkład pola temperatury na płaszczyźnie (analiza 2D) w stanie ustalonym.
Parametry: wymiary geometryczne płaszczyzny i źródła ciepła, gęstość, ciepło właściwe i
przewodność cieplna materiału, moc wydzielana , warunki brzegowe na krańcach
płaszczyzny, parametry siatki
Znaleźć rozkład pola temperatury w pręcie (analiza 1D) w stanach dynamicznych
(skorzystać ze schematu Eulera i Crank-Nicholsona)
Znaleźć rozkład pola temperatury na płaszczyźnie (analiza 2D) w stanach dynamicznych
(skorzystać ze schematu Eulera i Crank-Nicholsona)
2. Równanie przewodnictwa ciepła
O transporcie ciepła decydują trzy mechanizmy: przewodnictwo, konwekcja i radiacja.
Strumień ciepła opisany jest prawem Fouriera:
T
gdzie:
Φ
λ
-
strumień ciepła
przewodność cieplna
[W/m2]
[W/mK]
Przewodnictwo ciepła opisane jest równaniem Fouriera – Kirchhoffa:
T cT
gdzie:
ρ
c
-
T
T T H
t
gęstość
[kg/m3]
[J/kgK]
ciepło właściwe
Równanie to jest nieliniowe ze względu na zależność parametrów ośrodka od
temperatury. Ma to dość duże znaczenie w przypadku krzemu i pominięcie nieliniowości
może mieć znaczny wpływ na dokładność wyników. W typowych zastosowaniach, w
przedziale temperatur (200 – 600 K) przewodność cieplna krzemu (a także innych
półprzewodników) opisana jest wzorem 2.1:
a
T
λT Tχ λT0 0
T
T
χ
gdzie:
χ
aT
T0
-
parametr materiałowy
parametr materiałowy
temperatura odniesienia
[W/m]
[K]
Wartości parametrów materiałowych dla niektórych półprzewodników przedstawiono
w tabeli. Zależność przewodności cieplnej krzemu od temperatury przedstawiono na wykresie
(rys. 1).
Wartości stałych we dla niektórych materiałów
materiał
aT [W/m]
rys. 1
χ
krzem
4350
1,40
german
533
1,19
arsenek galu
587
1,25
Zależność przewodności cieplnej krzemu od temperatury
Parametrem uzależnionym od temperatury jest również pojemność cieplna (iloczyn
ciepła właściwego i gęstości materiału). Dla krzemu wartości pojemności cieplnej
przedstawia tabela i wykres (rys. 2).
Wartości pojemności cieplnej krzemu w różnych temperaturach
temperatura
c·ρ /λ
c·ρ
200
[W/Km3]
556
[m-2]
2,14
400
600
800
790
867
913
7,90
14,45
22,82
[K]
rys. 2
Zależność pojemności cieplnej krzemu od temperatury
Równanie przewodnictwa często przedstawia się w prostszej postaci, zakładając
niezależność przewodności cieplnej w funkcji współrzędnych przestrzennych i temperatury:
c
lub też
T 2T H
t
H
T D 2T
t
c
D
gdzie:
D
-
c
współczynnik wyrównywania temperatury
[m2/s]
Równanie to jest równaniem różniczkowym cząstkowym i jego rozwiązanie wymaga
podania określonych warunków brzegowych i początkowych.
Warunki początkowe podawane są tylko w przypadku rozwiązywania równania opisującego
dynamiczną pracę przyrządu. Na ogół jest to rozkład temperatury w chwili początkowej.
Większe trudności sprawia uwzględnienie warunków brzegowych – związanych z
odprowadzaniem ciepła na zewnątrz układu. Ogółem wyróżnia się cztery podstawowe typy
warunków brzegowych:
I – dany jest rozkład temperatury na powierzchni ciała
II – dany jest rozkład strumienia ciepła na powierzchni ciała
gdzie:
T
n
-
T
n
składowa gradientu temperatury w kierunku
normalnym do powierzchni
[K/m]
III – dany jest współczynnik przejmowania ciepła (h) [49] i temperatura otoczenia (Tamb)
hTamb T
gdzie:
h
Tamb
-
T
n
współczynnik wymiany ciepła z otoczeniem
temperatura otoczenia
[W/m2K]
[K]
IV – dana jest konduktancja termiczna styku na jednostkę powierzchni (g) przy nieidealnym
styku dwóch ciał (warunek ciągłości strumienia ciepła).
g th T2 T1 λ1
gdzie:
gth
-
T1
T2
λ2
n 1
n 2
konduktancja termiczna styku na jednostkę powierzchni
[W/m2K]
Warunek pierwszego rodzaju jest używany rzadko – jedynie do modelowania
wyidealizowanego przypadku chłodzenia izotermicznego. Warunek drugiego rodzaju jest
wykorzystywany
głównie
do
modelowania
adiabatycznego
warunku
brzegowego
(odprowadzany strumień ciepła jest wtedy równy zero).
Wartości parametru h dla różnych sposobów
chłodzenia
sposób chłodzenia
powietrzne
wodne (turbulentne)
h [W/(cm2 K)]
510-4
1–4
3. Wzory
Metoda różnic skończonych opiera się na wprowadzeniu do modelowanej struktury
siatki węzłów i zastąpieniu pojedynczego równania różniczkowego zestawem różnicowych
równań algebraicznych. Pochodne cząstkowe są aproksymowane przez odpowiadające im
ilorazy różnicowe. Wartości temperatury są obliczane jedynie w punktach dyskretyzacji –
węzłach siatki, co może być źródłem znacznych niedokładności. Błędy dyskretyzacji zależą
silnie od gęstości siatki. Gęstość siatki nie może być jednak zwiększana w dowolny sposób.
Jednym z ograniczeń jest maksymalny rozmiar otrzymywanego układu równań wynikający z
dostępnych zasobów pamięci komputera i warunkowany czasem obliczeń. Drugim
ograniczeniem jest stabilność numeryczna równań pogarszająca się znacznie przy zbyt niskiej
wartości stałej sieci.
W oryginalnej metodzie różnic skończonych siatka ma regularną budowę zależną od
wymiaru: 1D – odcinki, 2D – prostokąty, 3D – prostopadłościany (rys3).
rys. 3
Fragment siatki dla metody różnic skończonych
Każdy węzeł jest opisany jednym równaniem algebraicznym. Postać równania zależy
od liczby sąsiadów oraz rodzaju ewentualnych warunków brzegowych.
Dla uproszczenia wzory padano dla przypadku jednowymiarowego.
Wzór dla punktu wewnętrznego sieci:
2
ρ c
2
2
Ti(t1)
i i Ti( t )
Ti(t1)
d i 1 (d i 1 d i )
d i (d i 1 d i )
d i 1d i Δt λ i
H
2
2
2
Ti 1
Ti
Ti 1 i
d i 1 (d i 1 d i )
d i 1d i
d i (d i 1 d i )
λi
gdzie:
Ti(t)
di
di-1
Δt
-
H i Ti( t 1)
temperatura i-tego węzła w chwili czasowej t
odległość między węzłem (i) i (i+1)
odległość między węzłem (i) i (i-1)
krok czasowy
λi
ρi ci
Δt
(B.1)
[K]
[m]
[m]
[s]
Warunek brzegowy I rodzaju
Tn(t )1 Tamb
Tn 1 Tamb
gdzie:
n
-
liczba węzłów ((n-1) – numer węzła brzegowego)
Warunek brzegowy II rodzaju (adiabatyczny)
(B.2)
2
d n 2
2
2
d n 2
gdzie:
2
Tn( t )2
Tn( t )2
dn-1
H n 1 Tn( t 11)
2
ρ n 1 c n 1 ( t )
Tn 1
2
Δ
t
λ
λ n 1
d
n 1
n 2
H
2
Tn( t )1 n 1
2
λ n 1
d n 2
-
ρ n 1 c n 1
Δt
(B.3)
odległość między węzłem (n-1) i (n-2)
Warunek brzegowy III rodzaju
2
d n 2
2
2
d n 2
2
Tn( t )2
Tn 2
h d n 2
ρ c
2h
2
1
H n 1 Tn( t 11) n 1 n 1
Tamb
λ n 1
ρ n 1 c n 1 ( t )
Δt
d n 2
Tn 1
2
Δ
t
λ
λ n 1
d
n
1
n 2
(B.4)
h d n 2
2h
2
1
H n 1
Tamb
λ n 1
d n 2
Tn 1
2
λ n 1
d n 2
Warunek brzegowy IV rodzaju
g di
g
2
1
λ i (t) λ i
ρi ci
Ti 1
d i 1 d i
Δt λ i
d i 1 d i
2
ρ c
H i Ti( t 1) i i
(t)
2
Δt
Ti(t1)
Ti
d
d
d
λ
i
i 1
i
i
(B.5)
g di
g
2
1
λ
λi
H
2
T
Ti 1 i
Ti 1 i
i
d i 1 d i
d i 1 d i
d i d i 1 d i
λi
2
Łatwo można zauważyć, że w przypadku analizy statycznej dla węzłów nie położonych na
brzegach lub położonych na brzegach adiabatycznych, wyraz diagonalny jest sumą modułów
pozostałych współczynników. Dla pozostałych warunków brzegowych wyraz diagonalny jest większy.
W przypadku analizy dynamicznej, wyraz diagonalny jest większy dla wszystkich węzłów. Oznacza
to, że w przypadku analizy statycznej, macierz A jest macierzą dominującą diagonalnie, a w
przypadku analizy dynamicznej macierzą silnie dominującą diagonalnie. Jedynie równanie statyczne
przy wszystkich warunkach brzegowych adiabatycznych, nie spełnia definicji macierzy dominującej
diagonalnie. Ten przypadek można jednak pominąć w rozważaniach, gdyż układ równań jest wtedy
sprzeczny lub nieoznaczony.