UKŁADY I METODY
STEROWANIA
ŁAGODNYM ROZRUCHEM
SILNIKÓW INDUKCYJNYCH
DUŻEJ MOCY
Krzysztof PIEŃKOWSKI
Instytut Maszyn, Napędów i Pomiarów Elektrycznych
Plan wystąpienia
• Wprowadzenie
• Układy łagodnego rozruchu z tyrystorowymi
sterownikami napięcia
• Metody i układy sterowania procesem
łagodnego rozruchu
• Układy łagodnego rozruchu z dyskretnym
sterowaniem częstotliwości
• Układy łagodnego rozruchu z przekształtnikami
o komutacji wymuszonej
• Podsumowanie
Klasyfikacja układów łagodnego rozruchu
Układy łagodnego rozruchu z tyrystorowymi
sterownikami napięcia o sterowaniu fazowym;
Układy łagodnego rozruchu z dyskretnym
sterowaniem częstotliwości
Układy łagodnego rozruchu z przekształtnikami
o komutacji wymuszonej;
Przekształtnikowe układy łagodnego
rozruchu o sterowaniu fazowym
a)
b)
L1
L2
U
L3
V
c)
L1
W
L2
U
L3
V
M
M
3
3
W
L1
L3
L2
U1
V1
W1
M
3
W2
U2
V2
Przekształtnikowe układy łagodnego rozruchu o sterowaniu fazowym:
a), b) - układy In Line; c) - układ In Delta
Zasada sterowania fazowego
Zasada sterowania fazowego polega na generacji impulsów wyzwalania
tyrystorów w chwilach czasowych odpowiadających kątowi fazowemu,
mierzonemu względem napięcia fazowego sieci.
Stopniowe zwiększanie kąta fazowego zapewnia stopniowy wzrost wartości
skutecznej napięcia zasilania silnika, czyli łagodny rozruch silnika.
Tyrystorowe układy łagodnego rozruchu
napędów wielosilnikowych
a)
b)
SG
SG1
SB
VC
SB1
VC1
M
3
a)
b)
SG2
M
3
M
3
SB2
VC2
M
3
M
3
M
3
do jednoczesnego rozruchu 2 silników;
układ zintegrowany z dwoma sterownikami we wspólnej obudowie
Konstrukcja rozrusznika tyrystorowego
średniego napięcia
SG
Pomiar napięcia
FN
PM
FO
PM - Moduł mocy
MC - Moduł sterowania
Pomiar prądów
3 x PP
Zasilanie
elektroniki
Impulsy
bramkowe
Sygnały
sprzężeń
SB
Sieć MV
CONTROL
CPU
MC
M
3
FN - Nadajnik sygnałów
światłowodowych
FO - Odbiornik sygnałów
światłowodowych
PP - Przekładnik prądowy
Wykonania przemysłowe układów
łagodnego rozruchu
Układy łagodnego rozruchu silników indukcyjnych
średniego napięcia (MV) są dostępne w wykonaniach:
2.3 kV;
10kV;
3.3 kV;
11kV;
4.16 kV;
6 kV i 6.6 kV;
13.2 kV, 13.8 kV i 15kV.
Standardowy zakres prądów rozruchowych:
60 – 3000 A.
Standardowy zakres mocy znamionowych silnika:
200 kW – 50 MW.
Układy połączeń tyrystorów w
sterownikach AC średniego napięcia
Metody sterowania tyrystorowych
układów łagodnego rozruchu
a)
b)
Us
M
3
Us
IM
M
3
IM
GI
GI
α
α
Us
Uz(t)
CONTROL
c)
Us
IM UM
Us
Estymator
Momentu
GI
α
Us
IMz
CONTROL
Me
PI
d)
M
3
PI
CONTROL
Us
IM
M
3
n
Mez
n
GI
α
Us
CONTROL
nz
PI
nz(t)
a)
b)
c)
d)
sterowanie z zadaną rampą napięcia silnika,
sterowanie ze sprzężeniem zwrotnym od prądu rozruchowego silnika,
sterowanie ze sprzężeniem zwrotnym od momentu rozruchowego silnika,
sterowanie z adaptacją przyśpieszenia kątowego silnika
Sterowanie z zadaną rampą napięcia
Rampa standardowa
Czas t
Rampa z funkcją
KickStart
Czas t
Sterowanie ze sprzężeniem zwrotnym
od prądu rozruchowego silnika
a) Rozruch z utrzymywaniem zadanej
wartości prądu rozruchowego
silnika;
b) Rozruch ze sterowaniem prądu
rozruchowego silnika wg zadanej
rampy prądowej;
a)
b)
Sterowanie ze sprzężeniem zwrotnym od
momentu rozruchowego silnika
1) Rozruch z zadaną stałą wartością momentu rozruchowego;
2) Rozruch z zadaną liniową rampą momentu rozruchowego;
3) Rozruch z zadaną paraboliczną rampą momentu rozruchowego;
Sterowanie adaptacyjne rozruchem silnika –
( Adaptive Acceleration Control )
1) Rozruch z dużym przyśpieszeniem początkowym;
2) Rozruch ze stałym przyśpieszeniem początkowym;
3) Rozruch z małym przyśpieszeniem początkowym;
Metoda łagodnego rozruchu
z dyskretnym sterowaniem częstotliwości
Sterownik AC
do łagodnego
rozruchu
Charakterystyki
mechaniczne silnika
indukcyjnego przy
sterowaniu napięcia:
Charakterystyki mechaniczne
silnika indukcyjnego przy
sterowaniu
częstotliwościowym:
M = c∙ U2
M = k ∙ U/f
Zasada dyskretnego sterowania
częstotliwości przez sterownik AC
f = 50/8
= 6,25 Hz
1.5
1
0.5
0
-0.5 0
-1
-1.5
0.1
0.2
0.1
0.2
0.1
0.2
1.5
f = 50/5
1
0.5
= 10 Hz
0
-0.5 0
-1
-1.5
1.5
f = 50/3
1
0.5
0
= 16,7 Hz
-0.5 0
-1
-1.5
Porównanie metod rozruchu
Prąd stojana is(t):
SoftStart z
konwencjonalnym
sterowaniem fazowym
SoftStart z dyskretnym
sterowaniem
częstotliwości:
12,5 / 16,7 / 25 / 50 Hz
Układy łagodnego rozruchu z
przekształtnikami o komutacji wymuszonej
a)
L1
L2
L3
S1
S2
S3
b)
L1
L2
L3
S1
S3
S4
S4
S5
S6
U
V
W
S5
U
W
V
M
M
3
3
c)
lub
lub
a) układ pełny , b) układ uproszczony
c) możliwe układy klucza energoelektronicznego o dwukierunkowym przewodzeniu
Układy łagodnego rozruchu z
przekształtnikami o komutacji wymuszonej
Układ pełny
Układ uproszczony
Metody sterowania przekształtnikami o
komutacji wymuszonej
W układach łagodnego rozruchu z przekształtnikami o
komutacji wymuszonej mogą by stosowane następujące
metody sterowania elementów energoelektronicznych:
Nowe metody sterowania fazowego – sterowanie z
zachowaniem częstotliwości sieciowej;
Sterowanie impulsowe PWM – sterowanie o dużej
częstotliwości (rzędu kilku – kilkunastu kHz);
Nowe metody sterowania fazowego
Konwencjonalna metoda
sterowania fazowego
Zmodyfikowana metoda sterowania
fazowego (wymuszanie napięć zerowych)
Metoda sterowania fazowego
kątem wyłączania
Metoda symetrycznego sterowania fazowego
kątem załączania i wyłączania
Metody sterowania impulsowego
przekształtnikami o komutacji wymuszonej
Konwencjonalne sterowanie
impulsowe
Sterowanie impulsowe PWM z
zadanym przebiegiem
piłokształtnym
Przebiegi dla układu łagodnego rozruchu o
komutacji wymuszonej
Napięcie fazowe silnika us(t)
Prąd fazowy silnika is(t)
PODSUMOWANIE - Zalety stosowania
układów łagodnego rozruchu
Zmniejszenie prądu rozruchowego i spadków
napięć w sieci zasilającej;
Płynne zmiany przyspieszeń eliminują
powstawanie udarów sił i momentów;
Wydłużenie żywotności elementów
mechanicznych i elektrycznych układu
napędowego ;
Zmniejszenie częstości okresowych przeglądów i
konserwacji;
Zmniejszenie kosztów eksploatacji układu
napędowego.
PODSUMOWANIE
Przekształtnikowe układy łagodnego rozruchu o sterowaniu fazowym
zapewniają płynny rozruch silników indukcyjnych klatkowych z żądanym
ograniczeniem prądu rozruchowego. Układy nie zapewniają pożądanego
przebiegu rozruchu przy dużych momentach oporowych maszyn
roboczych.
Przekształtnikowe
układy
łagodnego
rozruchu
z
dyskretnym
sterowaniem częstotliwości zapewniają płynny rozruch silników
indukcyjnych klatkowych wymagających dużej wartości momentu
rozruchowego. Układy wymagają dość złożonego układu sterowania.
Przekształtnikowe układy łagodnego rozruchu o sterowaniu impulsowym
PWM (o komutacji wymuszonej) zapewniają płynny rozruch silników
indukcyjnych
klatkowych
przy
zmniejszonym
oddziaływaniu
przekształtnika na siec zasilającą.
Dziękuję za uwagę.
Porównanie
Moment elektromagnetyczny Me(t)
Konwencjonalny
SoftStart
SoftStart z dyskretnym
sterowaniem
częstotliwościowym:
12,5 / 16,7 / 25 / 50 Hz
Zgodnie z charakterystykami , przy rozruchu
bezpośrednim i rozruchu gwiazda-trójkąt, występują
udary prądu względnie udar momentu,
powodujące zwłaszcza w silnikach średnich i
dużych mocy, niekorzystne oddziaływania:
• wysokie obciążenie mechaniczne maszyny
• szybsze zużycie
• wyższe koszty serwisowe
• wysokie koszty przygotowania przez zakłady
energetyczne (obliczanie wartości szczytowych
prądu)
• wysokie obciążenie sieci względnie generatora
• przepięcia łączeniowe, które oddziaływają
niekorzystnie na innych odbiorców energii.
Pożądany jest zatem bezudarowy przyrost
momentu obrotowego i specjalna redukcja prądu
w fazie rozruchu. Umożliwia to rozrusznik
elektroniczny. Steruje on bezstopniowo napięciem
zasilania silnika trójfazowego w fazie rozruchu.
Dzięki temu silnik trójfazowy dopasowany zostaje
do zachowań pracującej maszyny. Unika się
udarów mechanicznych a wartości szczytowe
prądów zostają obniżone.
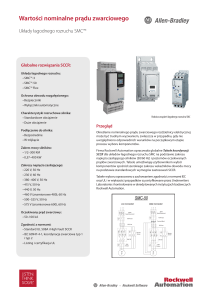
Rysunek 1 pokazuje zmiany momentu
przy ograniczaniu
pr.du rozruchowego. Ograniczenie pr.du
rozruchowego
do nastawionej wartoæci Is1 ma wp¸yw
na wielkoæ•
momentu rozruchowego Ms1, kt.ry w
praktyce zmniejsza
si« tyle razy, ile wynosi stosunek
kwadrat.w pr.d.w Is1
oraz Is.
Rysunek 2 pokazuje przebieg charakterystyki
mechanicznej silnika klatkowego w funkcji napi«cia
zasilaj.cego. Przy sta¸ej cz«stotliwoæci moment
zmienia
si« z kwadratem napi«cia. Stopniowy wzrost napi«cia
ogranicza wartoæci momentu i pr.du w czasie
rozruchu
i chroni przed chwilowymi udarami pr.dowymi.
i Pr.d rozruchowy
Nastawialny w granicach od 2 do 5 wartoæci pr.du
znamionowego
i Moment rozruchowy
Zmienny od 0.15 momentu znamionowego do pe¸nej
jego wartoæci
Advanced motor control
Digistart IS provides industry leading motor control, featuring constant current, current ramp and
adaptive control start methods. Adaptive control is an innovative
control method that not only controls motor current but
also acceleration. It allows the user to select between early,
constant or late acceleration/deceleration depending
upon the application requirements. Adaptive control then
monitors motor performance by analysing each start and
adjusting accordingly to maintain optimum control.
Adaptive control can benefit many applications. A principle
example is pumping where it can be used to eliminate
water hammer by allowing the engineer to select the most
appropriate deceleration profile for the system.
Metody sterowania tyrystorowych
układów łagodnego rozruchu
XLR-8 Adaptive Control
Using XLR-8 Adaptive Acceleration Control, the EMX3 learns your
motor’s performance during start and stop,
then adjusts control to optimize performance. Simply select the
profile that best matches your load type and the
soft starter automatically ensures the smoothest possible
acceleration for your load.