Uniwersytet Wrocławski
Instytut Fizyki Teoretycznej
Teoria Przejść Fazowych i Zjawiska
Krytyczne
Katarzyna Sznajd-Weron
Wrocław, luty 2012
1
2
Spis treści
1 Literatura pomocnicza
1.1 Książki w języku polskim . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Książki w języku angielskim . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Skrypty na www . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
1
2
2 Wstęp
2.0.1
2.0.2
4
6
9
Diagram fazowy wody . . . . . . . . . . . . . . . . . . . . . . . . .
Diagram fazowy ferromagnetyka . . . . . . . . . . . . . . . . . . . .
3 Termodynamika przejść fazowych
3.1 Wielkości termodynamiczne . . . . . . . . . . . . . . . .
3.2 Równanie Fundamentalne i Potencjały Termodynamiczne
3.2.1 Parametry intensywne i ekstensywne . . . . . . .
3.2.2 Równanie Fundamentalne . . . . . . . . . . . . .
3.2.3 Potencjały termodynamiczne . . . . . . . . . . .
3.3 Funkcje odpowiedzi . . . . . . . . . . . . . . . . . . . . .
3.3.1 Odpowiedź termiczna - ciepło właściwe . . . . . .
3.3.2 Odpowiedź mechaniczna . . . . . . . . . . . . . .
3.4 Warunki równowagi i stabilności . . . . . . . . . . . . . .
3.5 Klasyfikacja przejść fazowych . . . . . . . . . . . . . . .
3.6 Co to jest potencjał chemiczny? . . . . . . . . . . . . . .
4 Parametr Porządku i Teoria Landaua
4.0.1 Parametr porządku . . . . . . . . . . . . . .
4.0.2 Dwupunktowa funkcja korelacyjna i promień
4.0.3 Wykładniki krytyczne i klasy uniwersalności
4.1 Teoria Landaua ciągłych przejść fazowych . . . . .
4.1.1 Ciepło właściwe i entropia dla B > 0 . . . .
4.1.2 Uogólnienie: B ujemne . . . . . . . . . . . .
4.1.3 Gdzie są fluktuacje? . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . .
korelacji
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
12
13
13
13
15
16
16
17
17
18
20
.
.
.
.
.
.
.
22
22
23
24
24
26
27
29
5 Model Perkolacji w Ekonomii
33
5.1 Model Conta-Bouchaud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2 Samoorganizujący się model perkolacji fluktuacji na rynku finansowym . . 35
6 Modele
37
3
7 Co wiemy
7.0.1
7.0.2
7.0.3
7.0.4
na pewno? - czyli ścisłe wyniki w teorii przejść fazowych
Jednowymiarowy model Isinga z polem i dwuwymiarowy bez pola.
Model Perkolacji typu bond na sieci kwadratowej. . . . . . . . . .
Twierdzenie van Hove’a . . . . . . . . . . . . . . . . . . . . . . .
Twierdzenie Mermina-Wagnera . . . . . . . . . . . . . . . . . . .
8 Metoda Średniego Pola - Mean Field Approximation
8.0.5 Twierdzenie Peierlsa . . . . . . . . . . . . . . .
8.0.6 Metoda MFA dla modelu Isinga . . . . . . . . .
8.0.7 Metoda MFA dla modelu Perkolacji . . . . . . .
.
.
.
.
39
39
39
39
39
(MFA)
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
41
42
42
43
9 Metody Monte Carlo
45
9.1 Łańcuch Markowa i równanie Master . . . . . . . . . . . . . . . . . . . . . 47
9.2 Model Isinga i dynamika Glaubera . . . . . . . . . . . . . . . . . . . . . . 48
10 Skalowanie
52
10.1 Hipoteza skalowania w teorii przejść fazowych . . . . . . . . . . . . . . . . 53
11 Grupa Renormalizacyjna (GR)
11.1 Renormalizacja w przestrzeni rzeczywistej. . . . . . . . . . . . . .
11.2 Zastosowanie idei GR do polityki . . . . . . . . . . . . . . . . . .
11.3 Transformacja GR i Model Isinga . . . . . . . . . . . . . . . . . .
11.3.1 Decymacja w jednowymiarowym modelu Isinga . . . . . .
11.3.2 Transformacja blokowa w dwuwymiarowym modelu Isinga
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
58
59
60
61
61
63
5
Rozdział 1
Literatura pomocnicza
1.1
Książki w języku polskim
1. J. J. Binney, N. J. Dowrick, A. J. Fisher, M. E. J. Newman, ”Zjawiska krytyczne.
Wstęp do grupy renormalizacji”, PWN, Warszawa 1998
2. J. Klamut, K. Durczewski, J. Sznajd, ”Wstęp do fizyki przejść fazowych”, (Wyd.
PAN 1979)
3. K. Huang ”Mechanika statystyczna” (PWN, Warszawa 1986)
4. D. W. Heerman, ”Podstawy symuacji komputerowych w fizyce”, (WNT, Warszawa
1997)
5. N. G. van Kampen ”Procesy stochastyczne w fizyce i chemii” (PWN, Warszawa
1990)
6. H. G. Schuster ”Chaos Deterministyczny” (PWN, Warszawa 1993)
7. H.-O. Peitgen, H. J´’urgens, D. Saupe ”Granice Chaosu Fraktale” (PWN, Warszawa
1997)
1.2
Książki w języku angielskim
1. Silvio, R. A. Salinas ”‘Introduction to Statistical Physics”’ (Springer-Verlag 2001)
2. Linda E. Reichl ”‘A Modern Course in Statistical Physics”’ (Wiley 2009)
3. Michael Plischke, Birger Bergersen ”‘Equilibrium Statistical Physics”’ (PrenticeHall, Inc. 1989)
4. Herbert B. Callen ”‘Thermodynamics and an introduction to thermostatistics”’ second edition (John Wiley & Sons 1985)
5. Pavel L. Krapivsky, Sidney Redner, Eli Ben-Naim ”‘A kinetic view of Statistical
Physics”’ (Cambridge University Press 2011)
1
6. Malte Henkel, Haye Hinrichsen, Sven Lübeck ”‘Non-Equilibrium Phase Transitions”’
(Springer 2008)
7. Kim Christensen, Nicholas R. Moloney ”‘Complexity and Criticality”’ (Imperial
College Press 2005)
8. Dietrich Stauffer and Ammon Aharony ”Introduction To Percolation Theory”, (TAYLOR & FRANCIS LTD 1994)
9. D. P. Landau, K. Binder ”‘A Guide to Monte Carlo simulations in Statistical Physics”’, 2nd Edition (Cambridge University Press 2005)
1.3
Skrypty na www
1. http://panoramix.ift.uni.wroc.pl/ - Skrypt do wykładu z Wstępu do Teorii Przejść
Fazowych prof. dr hab. Andrzeja Pękalskiego (Uniwersytet Wrocławski)
2. http://panoramix.ift.uni.wroc.pl/ - Skrypt do wykładu z Fizyki Statystycznej II
prof. dr hab. Andrzeja Pękalskiego (Uniwersytet Wrocławski)
3. http://www.cmp.caltech.edu/refael/phys127b/ - Gil Refael notatki po angielsku do
wykładu Statistical Physics - Continuous Phase Transitions
4. http://www.dbc.wroc.pl/Content/994/gonczarek2.pdf - elektroniczna wersja książki Ryszard Gonczarek ”Teoria przejść fazowych - wybrane zagadnienia”, Oficyna
Wydawnicza Politechniki Wrocławskiej 2004
2
3
Rozdział 2
Wstęp
Kiedy byłam jeszcze na studiach, miałam trójkę znajomych zapaleńców górskich, których
największym marzeniem było spędzenie sylwestra na szczycie jakiejś wysokiej góry. Pewnej zimy, zaopatrzeni w super ciepłe śpiwory, butlę gazową i prowiant, pojechali w Tatry.
Jak później wspominali - ”Usiedliśmy na szycie góry, wyciągnęliśmy z plecaka butlę gazową i zaczęliśmy gotować jajka na naszą sylwestrową ucztę.” Ku ich zdumieniu jaja, mimo
trochę dłuższego niż zwykle gotowania okazały się na wpół surowe. Zaparzona na górze
herbata też nie smakowała jak należy. Czary? Złośliwość losu? Oczywiście, że nie.
Przyzwyczailiśmy się do tego, że woda gotuje się w temperaturze 1000 C. Zwykle zapominamy jednak, że jest to prawdą dopóki ciśnienie atmosferyczne wynosi 1bar = 1000hP a.
Ciśnienie atmosferyczne zależy zaś od tego na jakiej znajdujemy się wysokości - im wyżej tym ciśnienie niższe. Jeżeli mieszkamy na wybrzeżu morskim to ciśnienie atmosferyczne będzie rzeczywiście bliskie 1000hP a(1bar), ale już na Rysach wyniesie tylko
747hP a(0.747bar). No i co z tego? - ktoś mógłby się zapytać? Otóż okazuje się, że przy
ciśnieniu 0.747bar woda wcale nie zacznie się gotować w temperaturze 1000 C, tylko w
ok. 920 C. Możemy ją gotować oczywiście dłużej, ale woda wyższej temperatury już nie
osiągnie - po prostu zacznie się zamieniać w parę.
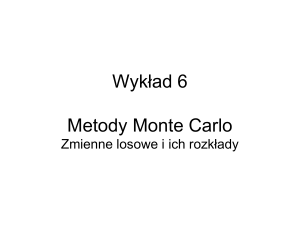
Spójrzcie na rysunek 2.1. Na rysunku tym przedstawiony został tzw. diagram fazowy dla wody. Pokazuje on w jakiej fazie znajduje się woda przy określonym ciśnieniu i
temperaturze. Jak wiadomo woda może znaleźć się zarówno w fazie stałej (lód), ciekłej,
jak i gazowej (para wodna). Jeżeli spojrzycie na diagram to zobaczycie, że przy ciśnieniu
0.747bar (na Rysach) w temperaturze 1000 C woda jest już parą, więc nie bardzo nadaje
się do parzenia herbaty.
Czarną herbatę zaparza się w temperaturze 1000 C, jeżeli zalejemy ją zimniejszą wodą
nie osiągnie pełni smaku. Niektórzy twierdzą, że właśnie dlatego Górale do kubka herbaty dolewają zawsze ”wzmacniaczy”. Może wobec tego na wyprawy wysokogórskie lepiej
zabrać herbatę białą lub zieloną, które parzy się w niższych temperaturach? W Tybecie,
gdzie zielona herbata już od prawie 1400 jest podstawowym napojem, dużo łatwiej ją zaparzyć niż we np. Wrocławiu - tam gotująca sią woda będzie miała temperaturę ok. 80 0 C,
czyli idealną do parzenia zielonej herbaty. U nas, woda po zagotowaniu ma temperaturę
prawie 1000 C, czyli musimy chwilę odczekać zanim zaczniemy herbatę parzyć. Problem
w tym, że nie bardzo wiadomo jak długo czekać ...
Wróćmy jeszcze na chwilę do diagramu fazowego wody. To co dotychczas pokazałam
to nie jest pełny diagram fazowy. Okazuje się, że lód może występować w wielu postaciach
(ogółem istnieje szesnaście odmian polimorficznych lodu, oznaczanych symbolicznie licz4
Poziom morza (0 m n.p.m)
1
p [bar]
0.8
Rysy (2500 m n.p.m)
0.6
Tybet (4800 m n.p.m)
0.4
Mount Everest (8848 m n.p.m)
0.2
LÓD
0
−40
−20
WODA
0
20
PARA
40
T [ C]
67 80
100
o
Rysunek 2.1: Diagram fazowy dla wody. Ciągłe linie dzielą diagram na trzy obszary, odpowiadające trzem fazom - stałej (lód), ciekłej (płynna woda) i gazowej (para wodna).
Jak widać przy ciśnieniu na Rysach (tzn. przy ciśnieniu 0.747 bar) w temperaturze 1000 C
woda jest już parą, więc nie bardzo nadaje się do parzenia herbaty. Na Mount Everest
jest jeszcze gorzej, bo woda już w temperaturze poniżej 700 C przechodzi w stan gazowy. Biorąc pod uwagę, że żółtko jajka ścina się w temperaturze 65 − 700 C, lepiej nie
nastawiać się na gotowanie tam jajek na twardo. Natomiast, jak widać z diagramu, Tybet jest idealnym miejscem do spożywania zielonej herbaty - tam woda zacznie wrzeć w
temperaturze ok 800 C, czyli idealnej do zaparzania tego napoju. Rysunek przygotowany
na podstawie danych dostępnych na stronie http://www.chemicalogic.com. Dane dla linii
topnienia i sublimacji na podstawie W. Wagner, A. Saul, A. Pruß: International Equations
for the Pressure along the Melting and along the Sublimation Curve for Ordinary Water
Substance, J. Phys. Chem. Ref. Data 23, No 3 (1994) 515
5
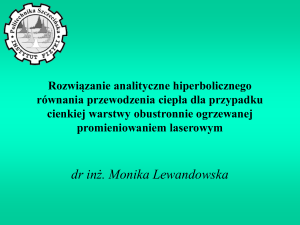
bami rzymskimi) i dlatego pełny diagram fazowy wody jest dużo bardziej skomplikowany
niż moglibyśmy przypuszczać (rys. 2.2).
Phase Diagram: Water - Ice - Steam
1.E+06
Sublimation Line
Ice I Line
Melting Line
(Ice V)
Ice III Line
1.E+04
Melting Line
(Ice VII)
Melting Line
(Ice VI)
Saturation Line
1.E+05
Ice V Line
Ice VI Line
Melting Line
(Ice III)
Ice VII Line
1.E+03
Liquid
Critical Point
1.E+02
Melting Line
(Ice I)
Saturation Line
Pressure (bar)
1.E+01
Solid
1.E+00
1.E-01
1.E-02
Triple Point
1.E-03
Sublimation Line
1.E-04
Vapor
1.E-05
1.E-06
1.E-07
0
100
200
300
400
Temperature (K)
500
600
700
800
Copyright © 1998 ChemicaLogic Corporation.
Rysunek 2.2: Pełny diagram fazowy dla wody przygotowany na podstawie danych dostępnych na stronie http://www.chemicalogic.com. Dane dla linii topnienia i sublimacji na
podstawie W. Wagner, A. Saul, A. Pruß: International Equations for the Pressure along
the Melting and along the Sublimation Curve for Ordinary Water Substance, J. Phys.
Chem. Ref. Data 23, No 3 (1994) 515
Zwróciliście też może uwagę na pewien szczególny punkt, oznaczony na rysunku 2.2
czarnym kwadratem i opisany jako Critical Point (punkt krytyczny)? To jest rzeczywiście bardzo szczególny punkt, ponieważ jak widać powyżej tego punktu nie istnieje już
linia rozdzielająca fazę ciekłą od gazowej. Czyli powyżej tego punktu nie występuje już
przejście fazowe. Nie występuje, bo nie ma już dwóch faz. Co w takim razie tam jest? Zachęcam do obejrzenia filmu ze strony http://www.youtube.com/watch?v=yBRdBrnIlTQ,
na którym profesor Martyn Poliakoff pokazuje eksperyment pokazujący co znajduje się
powyżej punktu krytycznego - nie jest to ani gaz, ani ciecz.
Przejście fazowe, które zachodzi w punkcie krytyczny (tzw. ciągłe) zasadniczo różni
się od tego, które zachodzi gdy przekraczamy linię współistnienia faz - jakie są to różnice
do tego jeszcze wrócimy w dalszej części wykładu.
2.0.1
Diagram fazowy wody
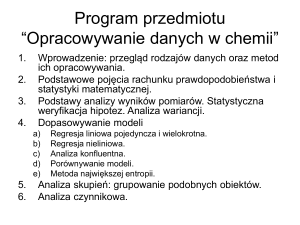
Przyjrzyjmy się jeszcze raz diagramowi fazowemu wody (rysunek 2.3). Czarne linie (górny
rysunek, przedstawiający diagram fazowy) oznaczają linie współistnienia faz - na liniach
tych obie fazy są w równowadze. Czy wiedzielibyście jak wyznaczyć te linie - tzn. jaki
jest warunek równowagi? Jeśli nie, to jeszcze do tego wrócimy. Przy przejściu przez linie
następuje przejście fazowe - przejście pomiędzy różnymi fazami. Jak zachodzi to przejście?
Na dolnym rysunku widać zależność pomiędzy dostarczanym do układu ciepłem a temperaturą. Aby podnieść temperaturę musimy dostarczyć do układu ciepło. Kiedyś koleżanka
6
wykonała następujący eksperyment. Wlała wodę do garnka, włożyła do wody termometr
(nie taki, jakim mierzy się temperaturę ciała, bo taki nie ma wystarczająco dużej skali),
a potem postawiła garnek na kuchence elektrycznej i zaczęła podgrzewać wodę. Co 10
sekund odczytywała temperaturę wody i zapisywała ją na kartce. Okazało się, że temperatura wody stale rosła w czasie aż do pewnego momentu ... W pewnej chwili mimo, ze
garnek z wodą nadal był podgrzewany temperatura przestała się zmieniać. Domyślacie
się ile wtedy wynosiła temperatura wody? Dlaczego pomimo dalszego podgrzewania temperatura pozostawała stała? Odpowiedź jest natychmiastowa jeżeli spojrzycie na dolną
część rysunku 2.3. Oczywiście analogiczne zjawisko zaobserwujecie, jeżeli włożycie wodę
z termometrem do zamrażalnika - temperatura do pewnego momentu będzie malała a
potem ...
Rysunek 2.3: Schematyczny diagram fazowy gaz-ciecz-ciało stałe oraz (poniżej) zależność
pomiędzy dostarczanym do układu ciepłem a temperaturą (Cooling Curve).
To doświadczenie z zamrażarką jest szczególnie interesujące. Jeżeli będziecie mieli tro7
chę szczęścia to możecie swoim gościom pokazać niezłą sztuczkę. Zajrzyjcie na stronę
youtube i wpiszcie hasło Supercooled Water - znajdziecie tam mnóstwo filmików z zamrażaniem wody. Supercooled Water (w języku polskim ciecz przechłodzona) to taka ciecz,
której temperatura jest na tyle niska, że powinna już być w stanie stałym, ale jednak w
takim nie jest. Znajduje się w stanie metastabilnym i zaburzenie tej cieczy (wstrząśnięcie
naczyniem z cieczą, fala dźwiekowa, wrzucenie kawałeczka lodu lub innego ciała – tzw.
zarodków krystalizacji) spowoduje jej natychmiastowe zamrożenie. Ciecz przechłodzoną
można otrzymać przez bardzo powolne ochładzanie czystej cieczy w naczyniu o gładkich
ściankach, przy braku drgań i wstrząsów mechanicznych lub bardzo szybkie ochładzanie. W wyniku nagłej krystalizacji cieczy przechłodzonej następuje wydzielenie ciepła i
podwyższenie temperatury substancji. Zjawisko to wykorzystywane jest przy produkcji
ogrzewaczy dłoni.
Ogrzewacze dłoni wykorzystujące ciepło krystalizacji roztworów przesyconych dostępne są w formie hermetycznie zamkniętych pojemników z tworzywa sztucznego, wypełnionych cieczą (postać gotowa do użycia) lub kryształkami (po użyciu). W pojemniku znajduje się też odpowiednio ukształtowana, metalowa blaszka, służąca jako „włącznik”. Wykorzystany ogrzewacz tego typu
można łatwo zregenerować ogrzewając go we wrzątku. W pojemniku znajduje
się sól o dużej skłonności do tworzenia roztworów przesyconych, zazwyczaj
uwodnionego octanu lub tiosiarczanu sodu. Sól w wyniku ogrzania pojemnika
w temperaturze kilkudziesięciu stopni ulega rozpuszczeniu we własnej wodzie
krystalizacyjnej i tworzy jednorodny roztwór. Po schłodzeniu ciecz staje się
roztworem przesyconym, lecz ze względu na brak zarodków krystalizacja nie
następuje. Aby uruchomić ogrzewacz należy wygiąć zawartą w opakowaniu
blaszkę tak, by przybrała drugi ze stabilnych kształtów. Powstająca przy tym
fala dźwiękowa, słyszalna jako „kliknięcie” zaburza stan metastabilny roztworu
i inicjuje krystalizację, która w ciągu kilkunastu sekund obejmuje całą objętość pojemnika. Wydzielane podczas krystalizacji ciepło rozgrzewa pojemnik,
a jego podwyższona temperatura może utrzymywać się od kilkunastu minut
do kilku godzin. [źródło: Wikipedia]
Jak już wspomniałam ciecz przechłodzona jest z termodynamicznego punktu widzenia
stanem metastabilnym, tzn. dla małych zaburzeń stabilnym, ale dla większych niestabilnym. Żeby lepiej zrozumieć czym jest stan metastabilny spójrzcie na rysunek 4.1.
Ze stanami metastabilnymi związane jest pojęcie histerezy. Ogólnie w naukach przyrodniczych histereza oznacza zależności aktualnego stanu układu od stanów w poprzedzających chwilach. Na przykład w przemianie fazowej ciało stałe-ciecz histereza występuje
kiedy temperatury topnienia i krzepnięcia są różne – np. agar topi się w temperaturze ok.
850 C a krzepnie w zakresie od 32 do 400 C. Oznacza to, że agar stopiony przy temperaturze
850 C pozostaje w stanie ciekłym do temperatury 400 C. Z drugiej strony jeżeli początkowo
jest w stanie stałym to aż do temperatury 850 C w takim stanie pozostanie. Dlatego w
temperaturach 40 − 850 C agar może być w postaci ciekłej lub stałej w zależności od stanu
wyjściowego.
Najbardziej znane jednak przypadki histerezy występują w materiałach magnetycznych, głównie w ferromagnetycznych, gdzie namagnesowanie następuje dopiero po pewnym wzroście zewnętrznego pola magnetycznego – do diagramu fazowego dla ferromagne8
stany metastabilne
stan stablilny
Rysunek 2.4: Kulka - w ”‘górzystym”’ krajobrazie (energia potencjalna) – poglądowe
przedstawienie stanów równowagi stabilnej, metastabilnej i niestabilnej. Podobnie może
wyglądać energia wewnętrzna układu, w którym realizowane są stany równowagi stabilnej,
metastabilnej i niestastabilnej.
tyka wrócimy w kolejnym rozdziale. Na razie jeszcze na chwilę wróćmy do dolnej części
rysunku 2.3.
Jak już powiedzieliśmy wydać z niego po pierwsze, że w momencie przemiany fazowej
dostarczanie lub wydzielanie się ciepła nie powoduje zmiany temperatury substancji –
ciepło zużyte zostaje na przemianę fazową. To ciepło nazywa się utajonym ciepłem przemiany (latent heat) i występuje tylko przy tzw. nieciągłych przejściach fazowych. Kolejna
obserwacja (patrz rys. 2.3) – przy tego rodzaju przejściu mamy obszary współistnienia
dwóch faz - w momencie topnienia lodu zarówno lód, jak i woda są obecne w układzie. To
współistnienie faz jest również charakterystyczne dla przejść nieciągłych. Do klasyfikacji
przejść fazowych jeszcze wrócimy, ale na razie możemy już podsumować, że dla przejść
nieciągłych jakimi są między innymi topnienie, krystalizacja, parowanie charakterystyczne
jest:
• Występowanie utajonego ciepła przemiany - ciepło jest pochłaniane lub wydzielane
w trakcie przemiany fazowej przy stałej temperaturze układu.
• W trakcie przemiany fazowej obserwujemy współistnienie faz, pomiędzy którymi
zachodzi przejście.
• Obserwowane są stany metastabilne, a co za tym idzie histerezy - stanu układu
zależy od stanów w poprzedzających chwilach.
2.0.2
Diagram fazowy ferromagnetyka
9
Rysunek 2.5: Magnetyzacja w zależności od temperatury.
10
Rozdział 3
Termodynamika przejść fazowych
Przejścia fazowe są zjawiskami kooperatywnymi, a więc zjawiskami zachodzącymi w układach wielocząstkowych. Oznacza to, że do ich opisu można użyć albo termodynamiki czyli
metody fenomenologicznej 1 , albo mechaniki statystycznej, która jest narzędziem pozwalającym przewidzieć zachowanie układu z dużą liczbą stopni swobody na podstawie praw
rządzących na poziomie mikroskopowym.
Termodynamika zajmuje się głównie problemami zamiany energii (pracy i ciepła) oraz
własnościami równowagowymi. Równowaga jest zjawiskiem makroskopowym i odnosi się
do skali czasu znacznie większej niż skala charakteryzująca ruch mikroskopowy. Z punktu
widzenia mikroskopowego równowaga jest takim szczególnym stanem ruchu, w którym, w
czasie obserwacji, nie zmienia się stan makroskopowy obserwowanego ciała.
Podstawą termodynamiki jest założenie, że przy określonych warunkach zewnętrznych dany układ ma jednoznacznie zdefiniowane własności równowagowe. Te zewnętrzne
warunki są określone przez zewnętrzne parametry takie jak: temperatura, ciśnienie, pole magnetyczne itd. Oczywiście przy różnych warunkach zewnętrznych układ ma różne
własności równowagowe. Przy czym przez własności równowagowe rozumiemy własności
strukturalne, termiczne, elektryczne, magnetyczne, elastyczne itd. Zazwyczaj małe zmiany
parametrów zewnętrznych np. temperatury powodują niewielkie zmiany własności układu.
Są jednak takie punkty na skali temperatur w pobliżu, których bardzo niewielka zmiana
temperatury powoduje gwałtowną zmianę własności układu. Taka nagła zmiana własności
nosi nazwę przejścia fazowego. Oznacza to, że dla wystąpienia przejścia fazowego potrzebne jest istnienie dwóch różnych równowagowych stanów układu (faz).
Gwałtowne, a często również niespodziewane zmiany występują w przeróżnych układach złożonych - poczynając od fizycznych (przejścia fazowe, np. topnienie lodu), poprzez
biologiczne (np. wymieranie i powstawanie gatunków), społeczne (np. bunty, rewolucje)
aż po ekonomiczne (np. krachy giełdowe). Okazuje się również, że wiele z tych zjawisk
wykazuje zaskakujące podobieństwo przynajmniej z formalnego punktu widzenia.
1
Fenomenologia w fizyce: Widzimy jak przebiega dane zjawisko, znajdujemy jakieś regularności, potrafimy przewidzieć, że takie regularności powinny wystąpić gdzie indziej, ale nie potrafimy tego zjawiska
wyjaśnić.
11
3.1
Wielkości termodynamiczne
Jak już wspomnieliśmy jednym z głównych zagadnień opisywanych przez termodynamikę
jest problemem zmiany energii wukładu. Energia wewnętrzna układu, podstawowa funkcja
stanu, może być zmieniona przez:
1. zewnętrzne siły, które wykonują pracę dW na tym układzie, ew. układ może wykonać
pracę,
2. oddanie (ew. pobranie) ciepła dQ = T dS,
3. zmianę liczby cząstek w układzie (cząstki mogą być różnych typów indeksowanych
przez j = 1, 2, ...), wkład do zmiany energii wewnętrznej wynosi wówczas:
X
µj dNj ,
(3.1)
j
gdzie µj jest potencjałem chemicznym cząstek typu j.
Opierając się na analogii mechanicznej możemy powiedzieć, że praca równa się sile
razy przesunięcie. W zależności od rodzaju układu może mieć postać:
• Praca dW wykonana przez napięcie f ciągnące metalowy pręt na dystansie dX jest
równa:
dW = −f dL.
(3.2)
• Zewnętrzne pole magnetyczne h wykonuje pracę, przy której wzrost energii obiektu
związany jest ze wzrostem namagnesowania:
dW = −hdM.
(3.3)
• Ciśnienie p jest siłą, która powoduje zmianę objętości V , a odpowiadająca temu
praca
dW = pdV
(3.4)
Brak znaku minus oznacza, że wzrost ciśnienia powoduje zmniejszanie się objętości.
Jak widać wszystkie czynniki 1-3 powodujące zmianę energii wewnętrznej mają postać pracy, przy czym Dystans L, namagnesowanie M , objętość V , liczba cząstek
N czy entropia S grają rolę uogólnionych współrzędnych, natomiast napięcie
f , pole magnetyczne h, ciśnienie p, potencjał chemiczny µ oraz temperatura T są uogólnionymi siłami zewnętrznymi, które mogą zmienić odpowiednie
współrzędne. Te uogólnione współrzędne są współrzędnymi makroskopowymi
(termodynamicznymi). Na szczególną uwagę zasługuje entropia, która nie jest typową
współrzędną – dzięki niej można wyrazić ruch mikroskopowy cząstek w sposób kolektywny.
12
3.2
Równanie Fundamentalne i Potencjały Termodynamiczne
Językiem współczesnej teorii przejść fazowych jest magnetyzm. Poznaliśmy już w czasie
kursu fizyki statystycznej równanie fundamentalne dla układu P T V , ale dla porządku
przypomnijmy je sobie i wprowadźmy je dla układów magnetycznych.
Aby opisać układ można podawać za każdym razem zbiór wszystkich wielkości termodynamicznych, charakteryzujących stan równowagi termodynamicznej, ale żeby opis ten
był bardziej przejrzysty i wygodniejszy w użyciu lepiej ograniczyć się do wyboru zmiennych niezależnych. Oczywiście taki wybór nie jest jednoznaczny - możemy traktować na
przykład S, V, N (lub S, M, N dla układów magnetycznych) jako zmienne niezależne, a
wtedy T, p, µ (odpowiednio T, h, µ) będą mogły być wyrażone przez te zmienne - pamiętacie siły i współrzędne uogólnione są związane ze sobą przez energię. Oczywiście można
też wybrać jako trójkę zmiennych niezależnych np. T, V, N lub dokonać jeszcze innego
wyboru. Musimy też znaleźć sposób wyrażenie tych zmiennych za pomocą pozostałych
wielkości termodynamicznych.
Układy w stanie równowagi opisujemy za pomocą pewnych funkcji termodynamicznych
- tzw. równania fundamentalnego lub potencjałów termodynamicznych, tzn. transformacji
Legendre’a równania fundamentalnego. Wszystkie te funkcje mają tę własność, że dzięki nim możemy określić wszystkie wielkości charakteryzujące dany układ. W przypadku
równania fundamentalnego zmiennymi zależnymi są wyłącznie tzw. parametry ekstensywne (patrz dalej), w przeciwieństwie do znacznie ogólniejszego przypadku potencjałów
termodynamicznych.
3.2.1
Parametry intensywne i ekstensywne
Wszystkie termodynamiczne parametry układu można podzielić na dwie kategorie
1. Addytywne (ekstensywne), tzn. mające taką własność, że wartość tego parametru
dla całego układu równa się sumie wartości tego paratemru identycznych podukładów tworzących dany układ. Przykładami takich parametrów są energia, entropia,
objętość, magnetyzacja, liczba cząstek: U (λS, λV, λN1 , ..., λNr ) = λU (S, V, N1 , ..., Nr )
2. Nieaddytywne (intensywne), wartość tego parametru dla całego układu równa się
wartości tego paratemru dla każdego z identycznych podukładów tworzących dany
układ, np. temperatura czy ciśnienie: T (λS, λV, λN1 , ..., λNr ) = T (S, V, N1 , ..., Nr )
3.2.2
Równanie Fundamentalne
W stanie równowagi układ może być określony jednoznacznie poprzez podanie tzw. równania fundamentalnego, tzn. związku pomiędzy energią wewnętrzną (albo entropią) a
pozostałymi parametrami ekstensywnymi. Równanie fundamentalne może więc przybierać
następujące postaci:
• Dla układów P T V :
S = S(U, V, N1 , ..., Nr )
U = U (S, V, N1 , ..., Nr ).
13
(3.5)
(3.6)
• Dla układów magnetycznych:
S = S(U, h, N )
U = U (S, h, N ).
(3.7)
(3.8)
Parametry intensywne można wprowadzić formalnie obliczając różniczkę zupełną:
dU =
∂U
∂S
!
∂U
dS +
∂V
V,N1 ,...,Nr
!
dV +
r
X
j=1
S,N1 ,...,Nr
∂U
∂Nj
!
dNj
(3.9)
S,V,...Nk
Wprowadźmy następujące oznaczenia:
∂U
∂S
!
∂U
−
∂V
!
≡T
temperatura
(3.10)
≡P
ciśnienie
(3.11)
≡ µj
potencjał chemiczny
(3.12)
V,N1 ,...,Nr
∂U
∂Nj
S,N1 ,...,Nr
!
S,V,...Nk
Dla układów magnetycznych będziemy mieli oczywiście odpowiednio:
dU =
∂U
∂S
!
∂U
dS +
∂M
V,N
!
∂U
dM +
∂N
S,N
!
dN
(3.13)
S,V
gdzie pojawia się dodatkowo pole magnetyczne jako pochodna magnetyzacji:
∂U
∂M
!
≡ H.
(3.14)
S,N
W przypadku układów magnetycznych liczba cząstek N będzie praktycznie zawsze ustalona, także dN = 0 i nie będziemy zaznaczać, że pracujemy dla N = const. Dodatkowo,
żeby uniezależnić zmienne od wielkości układu będziemy zwykle używać zmiennych na
cząstkę i oznaczać je małymi literami, np magnetyzacja m = M/N .
Jak widać parametry intensywne pojawiają się wówczas jako odpowiednie pochodne
cząstkowe parametrów ekstensywnych i można zamiast równania fundamentalnego zapisać
3 równania stanu (napisz analogiczne dla układu magnetycznego):
T = T (S, V, N ) = T (s, v)
p = p(S, V, N ) = p(s, v)
µ = µ(S, V, N ) = µ(s, v)
(3.15)
Jeżeli znamy dwa z powyższych równań to trzecie możemy wyznaczyć z tzw. relacji
Gibbsa-Duhema, która dla układu jednoskładnikowego ma postać (pokaż na ćwiczeniach):
SdT − V dP + N dµ = 0.
(3.16)
Jeżeli mamy już wszystkie 3 równania stanu wówczas możemy odtworzyć równanie fundamentalne, tzn. mamy pełna termodynamiczną informację o układzie.
14
Oczywiście zawsze możemy wyrazić energię wewnętrzną jako funkcję innych zmiennych niż S, V, N (S, M, N ). Na przykład moglibyśmy wyeliminować S z U = U (S, V, N )
i T = T (S, V, N ) w rezultacie otrzymując U = U (T, V, N ). Jednak takie równanie nie
daje pełnej informacji o układzie tzn. nie jest równaniem fundamentalnym. Dlaczego?
Przypomnijmy sobie, że: T = (∂U/∂S)V,N . Rozważmy teraz zależność U = U (T, V, N ) i
zobaczmy czy potrafimy jednoznacznie wyznaczyć z niej zależność U = U (S, V, N ). Jeżeli
wykreślilibyśmy przy V, N = const zależność U = U (T ) = U (∂U/∂S) to odpowiadałoby
jej nieskończenie wiele zależności U = U (S) o tym samym nachyleniu co U (T ), ale dowolnie poprzesuwanych wzdłuż osi S, ponieważ jak wiecie różniczka za stałej wartości wynosi
zero. Wobec tego z zależnosci U = U (S) możemy jednoznacznie wyznaczyć U = U (T ), ale
nie odwrotnie. A gdybyśmy chcieli, żeby to nie temperatura była pochodną, ale entropia?
Wówczas musimy wprowadzić potencjały termodynamiczne.
3.2.3
Potencjały termodynamiczne
Dotychczas termodynamiczną informację o układzie otrzymywaliśmy z równania fundamentalnego, które mogło być zapisane w języku energii albo entropii. W obu tych reprezentacjach parametry ekstensywne odgrywały rolę zmiennych niezależnych a parametry
intensywne pojawiały się jako odpowiednie pochodne. Jednakże z punktu widzenia eksperymentu znacznie wygodniej operować parametrami intensywnymi. To właśnie parametry
intensywne są łatwo kontrolowane i mierzone. Wygodniej zatem byłoby móc operować nimi jako zmiennymi niezależnymi. Poznaliście już na mechanice klasycznej formalizm, który to umożliwia - transformata Legendre’a. Potencjałami termodynamicznymi będziemy
nazywali właśnie różne transformaty Legendre’a równania fundamentalnego. W różnych
podręcznikach nazywają się one różnie, ale nie nazwy są dla nas istotne, ale to jak wygląda
potencjał w zależności od tego z jakimi parametrami chcemy mieć do czynienia.
W ogólności mamy związek:
Y = Y (X0 , X1 , ..., Xr )
(3.17)
i chcemy aby zmiennymi niezależnymi zamiast Xk były:
Pk ≡
∂Y
.
∂Xk
(3.18)
X
(3.19)
Umożliwia nam to transformata Legendre’a:
Ψ=Y −
Pk X k .
k
Możemy na przykład zastąpić w równaniu fundamentalnym entropię przez temperaturę. Taki potencjał nazywany jest zwykle energią swobodną Helmholtza i oznaczany przez
F . Transformacja Legendre’a ma wtedy postać
U = U (S, V, N1 , N2 , ...)
S → T
∂F
S = −
∂T
F = U − TS
F = F (T, V, N1 , N2 , ...)
15
(3.20)
(3.21)
Podobnie można otrzymać inne potencjały termodynamiczne, np. entalpię H:
U = U (S, V, N1 , N2 , ...)
V → P
∂U
−P =
∂V
H = U +VP
H = H(S, P, N1 , N2 )
(3.22)
(3.23)
(3.24)
Innym popularnym potencjałem termodynamicznym jest energia swobodna Gibbsa, w
który zamiast entropii zmienną niezależną jest temperatura, a zamiast objętości występuje
jako zmienna niezależna ciśnienie:
U
S
V
G
G
3.3
=
→
→
=
=
U (S, V, N1 , N2 , ...)
T
P
U − TS + V P
G(T, p, N1 , N2 , ...)
(3.25)
(3.26)
Funkcje odpowiedzi
Niezwykle ważne z punktu widzenia zrozumienia przejść fazowych, są funkcje, które określają nam jak układ reaguje na zmianę pewnych parametrów zewnętrznych. Takie funkcje
nazywamy funkcjami odpowiedzi, są to wielkości termodynamiczne, które są najbardziej
przydatne z punktu widzenia eksperymentu.
Odpowiedź układu może być dwojakiego rodzaju - termiczna lub mechaniczna.
3.3.1
Odpowiedź termiczna - ciepło właściwe
Odpowiedź termiczną mierzy tzw. ciepło właściwe (heat capacity), które określa jak dużo
trzeba dodać do układu ciepła, żeby zmienić jego temperaturę:
C≡
dQ
.
dT
(3.27)
Gdy mierzymy C to staramy się ustalić wszystkie inne zmienne niezależne poza temperaturą. Jeżeli rozważamy układ o ustalonej liczbie cząstek N = const to oczywiście zmienne,
które moglibyśmy ew. zmienić to p i V (ew. h i M ). Jednak p jest zależne od V (podobnie
h od M ) - możemy więc przyjąć za zmienną niezależną V , wtedy p jest zależne lub p
i wtedy V jest zależne (odpowiednio ta sama dyskusja dla magnetykow). W zależności
na co się zdecydujemy mamy T, V, N jako zmienne niezależne lub T, p, N i odpowiednio
mierzymy ciepło właściwe przy stałej objętości CV lub przy stałym ciśnieniu Cp . Wygodnie jest wyrazić oba te ciepła przy pomocy entropii korzystając ze związku dQ = T dS
16
(ćwiczenia):
CV = T
Cp = T
∂S
∂T
!
∂S
∂T
!
(3.28)
V
,
(3.29)
p
lub dla układów magnetycznych:
cv = T
cp = T
3.3.2
∂s
∂T
!
∂s
∂T
!
(3.30)
m
.
(3.31)
h
Odpowiedź mechaniczna
Pierwszą z funkcji odpowiedzi mechanicznej jest tzw. podatność izotermiczna, czyli
jak nazwa wskazuje jak układ reaguje na zmianę pewnego zewnętrznego (kontrolnego)
parametru przy stałej temperaturze. Co może być tym parametrem skoro T = const?
Oczywiście ciśnienie (wpływa na zmianę objętości) lub pole magnetyczne (wpływa na
zmianę magnetyzacji) w zależności od rozważanego układu:
• Podatność magnetyczna:
ξT =
∂m
∂h
!
• Ściśliwość izotermiczna:
∂V
∂p
1
κT =
V
.
(3.32)
T
!
.
(3.33)
T
Szybkie pytanie kontrolne: Dlaczego w równaniu na ściśliwość izotermiczną mamy dzielenie przez V , a w równaniu na podatność magnetyczną nie?
Formalnie można również analogicznie zdefiniować podatność adiabatyczną (przy stałej entropii), ale nie będziemy jej używać ze względu na małą użyteczność praktyczną
(dlaczego?). Można również zapytać jak będzie reagowała objętość przy zmianie temperatury. Tą informację daje nam tzw. rozszerzalność cieplna:
1
α=
V
∂V
∂T
!
,
(3.34)
P
jednak ponieważ będziemy się zajmowali głównie układami magnetycznymi, nie będziemy
z niej korzystali.
3.4
Warunki równowagi i stabilności
Rozważmy teraz izolowany układ, tzn. U = const złożony z dwóch podukładów przedzielonych ścianą, która nie przepuszcza cząstek ale przepuszcza ciepło. Energie podukładów
oznaczymy przez U1 i U2 . Z addytywności energii otrzymujemy natychmiast:
U1 + U2 = U = const.
17
(3.35)
Chcemy teraz znaleźć warunek na równowagę takiego układu. Z drugiej zasady termodynamiki w stanie równowagi:
dS = 0.
(3.36)
Ponieważ entropia jest ekstensywna:
S = S1 (U1 , V1 , N1 ) + S2 (U2 , V2 , N2 ).
(3.37)
Możemy teraz obliczyć:
dS =
∂S1
∂U1
!
∂S2
dU1 +
∂U2
V1 ,N1
!
dU2 .
(3.38)
V2 ,N2
Pozostałe wyrazy nie występują ponieważ w rozważanym przykładzie dV1 , dV2 , dN1 , dN2 =
0. Zgodnie z naszą definicją:
1
1
dS = dU1 + dU2
(3.39)
T1
T2
Ponieważ U1 + U2 = const, więc:
dU1 + dU2 = 0 → dU1 = −dU2 .
(3.40)
Czyli:
1
1
−
dS =
dU2
(3.41)
T1 T2
Ponieważ w stanie równowagi dS = 0 dla dowolnej wartości dU2 ,tzn. dowolny skończony
przepływ energii z podukładu 1 do 2 nie zmienia entropii całego układu, czyli
1
1
=
T1
T2
(3.42)
Oczywiście dotychczas określiliśmy jedynie warunki równowagi w przypadku gdy podukłady nie zmieniają objętości ani nie wymieniają cząstek. Jakie byłyby warunki równowagi
w przypadku gdy możliwa byłaby zmiana objętości i liczby cząstek podukładów (ćwiczenia)? Kolejnym problemem jest zbadanie stabilności takiej równowagi, tzn. znalezienie
warunku, dla którego dS 2 < 0, dU 2 > 0. Dopuszcza się możliwość wzbudzeń, przy których
tylko jedna z tych nierówności jest spełniona. Stan taki nazywamy stanem równowagi
metastabilnej. Stany metastabilne realizowane są na przykład przy przegrzaniu lub przechłodzeniu.
Można pokazać (ćwiczenie), że warunek stabilności równowagi ma postać:
cv , κT > 0
(3.43)
Jeżeli kryterium stabilności nie jest spełnione wówczas układ rozpada się na dwa lub
więcej faz. Ten rozpad nazywamy przejściem fazowym.
3.5
Klasyfikacja przejść fazowych
Każdy nas chyba codziennie spotyka się z przejściami zachodzącymi w wodzie - gotując wodę czy mrożąc lód do napojów. W normalnych warunkach są to tak zwane przejścia nieciągłe (albo pierwszego rodzaju). Można się łatwo domyśleć, że skoro istnieją
18
przejścia nieciągłe to są również ciągłe. Modelowym przykładem przejścia ciągłego jest
przemiana żelaza z postaci paramagnetycznej w ferromagnetyczną w temperaturze Curie
Tc = 1043K. W temperaturze T > Tc żelazo (miedź, cynk) jest paramagnetyczne, tzn. nie
ma pola magnetycznego. Natomiast dla T < Tc materiał jest w stanie ferromagnetycznym, tzn. jest namagnesowany nawet bez zewnętrznego pola, natomiast w polu moment
magnetyczny obraca się natychmiast w kierunku przyłożonego pola.
Parametrem pozwalającym eksperymentalnie podzielić wszystkie przejścia fazowe jednoznacznie na ciągłe i nieciągłe jest ciepło utajone przemiany. Przejścia nieciągłe są to
takie przejścia, w których występuje ciepło przemiany, tzn. w trakcie przejścia z fazy wysokotemperaturowej do niskotemperaturowej w pobliżu temperatury przejścia wydziela się
skończona ilość ciepła, zwana ciepłem przemiany. Wszystkie przejścia fazowe, w których
nie występuje ciepło przemiany klasyfikujemy jako ciągłe. Większość przejść fazowych I
rodzaju redukuje się w pewnym punkcie do przejścia ciągłego.
Ciepło utajone przemiany q jest energią potrzebną do przeniesienia cząstki z jednej
fazy do drugiej. Niech Ni oznacza liczbą cząstek w i-tej fazie oraz:
i =
Ei
Ni
vi =
Vi
Ni
si =
Si
Ni
(3.44)
oznaczają odpowiednio energię, objętość i entropię przypadającą na cząstkę w i-tej fazie.
Z pierwszej zasady termodynamiki (zasady zachowania energii), wiemy że:
dE = dQ − dW → dQ = dE + dW = dE + pdV
(3.45)
gdzie dE oznacza zmianę energii wewnętrznej układu, dQ ilość ciepła dodaną układowi,
a dW = pdV pracę wykonaną przez układ. Czyli ciepło utajone przemiany:
q = (1 − 2 ) + p(v1 − v2 ).
(3.46)
Z warunku równowagi:
µ1 = µ2
T1 = T2 = T
p1 = p2 = p.
(3.47)
Potencjał chemiczny układu złożonego z identycznych cząstek jest po prostu potencjałem
termodynamicznym Gibbsa na cząstkę:
µi =
Gi
Ei − T Si + pVi
=
= i − T si + pvi .
Ni
Ni
(3.48)
Czyli:
µ1 −µ2 = (1 −2 )−T (s1 −s2 )+p(v1 −v2 ) = [(1 −2 )+p(v1 −v2 )]−T (s1 −s2 ) = 0 (3.49)
Korzystając teraz ze wzoru (3.46) otrzymujemy:
q − T (s1 − s2 ) = 0 ⇒ q = T (s1 − s2 ).
(3.50)
Ciepło utajone przemiany jest parametrem pozwalającym eksperymentalnie podzielić wszystkie przejścia fazowe na ciągłe, przy których obserwuje się
skok entropii i q 6= 0 oraz ciągłe, w których entropia zmienia się w sposób
ciągły i w związku z tym q = 0
19
3.6
Co to jest potencjał chemiczny?
Jak napisałam w poprzednim rozdziale potencjał chemiczny układu złożonego z identycznych cząstek jest po prostu potencjałem Gibbsa termodynamicznym na cząstkę. Czy to
jest takie oczywiste? Jak można to pokazać?
Można to pokazać niemal natychmiast jeżeli skorzystamy ze szczególnej postaci równania Eulera:
U = T S − pV + µN.
(3.51)
Wówczas z transformaty Legendre’a otrzymamy:
G = U − T S + pV = T S − pV + µN − T S + pV = µN.
(3.52)
Skąd bierze się równanie Eulera (3.51)? Żeby je wyprowadzić musimy skorzystać z
pewnej istotnej własności energii wewnętrznej – ekstensywności, która oznacza:
U (λS, λX1 , ...) = λU (S, X1 , ...)
(3.53)
Zróżniczkujmy to obustronnie po λ:
∂U (λS, λX1 , ...) ∂(λS) ∂U (λS, λX1 , ...) ∂(λX1 )
+
+ ... = U (S, X1 , ...).
∂(λS)
∂λ
∂(λX1 )
∂λ
(3.54)
To ma być prawda dla dowolnego λ, a więc również λ = 1:
∂U
∂U
S+
X1 + ... = U.
∂S
∂X1
(3.55)
Czyli dla układu jednoskładnikowego P V T otrzymujemy:
U = T S − pV + µN
20
(3.56)
21
Rozdział 4
Parametr Porządku i Teoria Landaua
W tym rozdziale dowiemy się jak teoretycznie opisać przejścia fazowe, a w szczególności
ciągłe przejścia fazowe. Pierwszym krokiem w tym kierunku będzie wprowadzenie tak
zwanego parametru porządku, a uwieńczeniem genialna teoria Landaua z 1937.
Załóżmy, że mamy do czynienia z kryształem, którego komórka elementarna jest prostą
komórką kubiczną. Infinityzymalne przemieszczenie węzłów sieci może doprowadzić do
przejścia komórki kubicznej w tetragonalną, a więc do zmiany symetrii. Podobnie symetria
fazy paramagnetycznej jest inna niż ferromagnetycznej. Ideę Landaua można sprowadzić
do założenia, że przy tego typu przejściach fazowych zawsze można znaleźć wielkość, której
mała zmiana powoduje zmianę symetrii. Wielkość tę nazywamy parametrem porządku.
Rysunek 4.1: Który twoim zdaniem układ ma wyższą symetrię - ten po lewej (T < Tc )
czy po prawej (T > Tc ). Zastanów się dobrze - co się stanie gdy odwrócisz rysunki do
góry nogami?
4.0.1
Parametr porządku
Do opisu każdego przejścia fazowego ciągłego można zdefiniować tzw. parametr porządku
φ, tzn. parametr, który pozwala rozróżnić nam poszczególne fazy. Jest to wielkość, która
jest różna poniżej punktu krytycznego jest różna od zera, a powyżej tego punktu równa
22
przejście fazowe
parametr porządku
własność
ciecz-gaz
gęstość
skalar
ferro-paramegnetyk
magnetyzacja
wektor
antyferro-paramagnetyk
magnetyzacja podsieci
wektor
polaryzacja
wektor
ferro-paraelektryk
nadciekłość
amplit. fun. fal. He4
zespolone pole skalarne
amplit. fun. fal. par elektronów zespolone pole skalarne
nadrzewodnictwo
ω+ −ω−
Wszechświat
skalar
ω+ +ω−
ωL −ωR
Życie
skalar
ωL +ωR
Tabela 4.1: Przykłady parametru porządku. ω± oznacza liczbę cząstek i antycząstek, ωL,R
liczbę lewo- i prawoskrętnych aminokwasów.
zero. Znikanie parametru porządku jest związane z podwyższeniem symetrii, a więc pojawieniem sie jakiegoś nowego elementu symetrii. Przykłady parametrów porządku zebrane
zostały w tabeli.
W przypadku przejścia ciecz-gaz parametrem porządku jest różnica gęstości cieczy i
gazu; φ = (ρciecz − ρgaz ). Dla ferromagnetyka natomiast będzie to po prostu spontaniczna
magnetyzacja φ = M .
4.0.2
Dwupunktowa funkcja korelacyjna i promień korelacji
Wiele naszej wiedzy o ciągłych przejściach fazowych pochodzi z eksperymentów, w których
rozpraszane są cząstki (np. fotony, fonony, elektrony czy neurony) w układach znajdujących się w pobliżu stanu krytycznego. Okazuje się, że analiza rozpraszania prowadzi prawie
natychmiast do dwupunktowej funkcji korelacyjnej 1 :
G(ri , rj ) = hφ(ri )φ(rj )i =< φ(ri ) >2 + hδφ(ri )δφ(rj )i
(4.1)
W ogólności wartość parametru porządku zależy od położenia ri . Możemy jednak
zawsze podzielić nasz parametr porządku na dwie części: średnią φ =< φ(ri ) > oraz
fluktuacje δφ(ri ). Wówczas parametr porządku w punkcie ri możemy zapisać jako:
φ(ri ) = φ + δφ(ri ).
(4.2)
Jeżeli policzymy teraz funkcję korelacyjną to otrzymamy:
hφ(ri )φ(rj )i =
D
E
φ2 + φ(δφ(ri ) + δφ(rj )) + δφ(ri )δφ(rj ) + hδφ(ri )δφ(rj )i
= φ2 + hδφ(ri )δφ(rj )i .
(4.3)
Pierwsza część tej funkcji tzn. φ2 opisuje daleki porządek parametru porządku, a drugi
Gzw (ri , rj ) = hδφ(ri )δφ(rj )i - bliski porządek.
Eksperymenty z rozpraszaniem pokazują, że dla T = Tc ogon funkcji korelacyjnej, tzn.
gdy r = |ri − rj | jest duże opisywana jest również prawem potęgowym:
Gzw (r) ∼
1
1
rd−2−η
,
(4.4)
Nie będziemy tego tutaj pokazywać, ale zainteresowani mogą odnaleźć odpowiedni rachunek w książce
J.J. Binney, N. J. Dowrick, A. J. Fisher, M. E. Newman ”Zjawiska krytyczne. Wstęp do
teorii grupy renormalizacji”, PWN 1998.
23
wykładnik krytyczny
zależność
α
c ∼ |T − Tc |−α
β
φ ∼ |T − Tc |−β
γ
κT ∼ |T − Tc |−γ
η
G(r) ∼ r2−d−η
ν
ξ ∼ |T − Tc |−ν
Fe
∼ −0.03
∼ −0.37
∼ 1.33
∼ 0.07
∼ 0.69
Tabela 4.2: Wykładniki krytyczne
gdzie d jest wymiarem układu, a η wykładnikiem krytycznym. Praw potęgowych i wykładników krytycznych mamy zresztą w teorii przejść fazowych znacznie więcej i wkrótce
je poznamy. Dla temperatur dalekich od krytycznej można przyjąć, że asymptotycznie
(tzn. dla dużych r):
!
r
Gzw (r) ∼ exp −
,
(4.5)
ξ
gdzie ξ jest tak zwanym promieniem korelacji. Ogólnie można zapisać:
Gzw (r) ∼
exp − rξ
rd−2−η
.
(4.6)
Promień korelacji ξ jest kluczowym pojęciem współczesnej teorii przejść fazowym i
oznacza odległość, na której fluktuacje parametru porządku są znacząco skorelowane.
Dzięki pojęciu promienia korelacji możemy wprowadzić ogólną, precyzyjną definicję punktu krytycznego:
T → Tc ⇒ ξ → ∞.
(4.7)
4.0.3
Wykładniki krytyczne i klasy uniwersalności
Poznaliśmy już jeden wykładnik krytyczny η, okazuje się, że wiele wielkości termodynamicznych wykazuje rozbieżność przy ciągłym przejściu fazowym.
Jest rzeczą zdumiewającą, że czasem wykładniki krytyczne dla zupełnie odmiennych
przejść są identyczne. Ta cecha, która oznacza, że układy niepodobne do siebie mają takie
same wykładniki krytyczne jest nazywana uniwersalnością. Do tej samej klasy uniwersalności należą układy, które mają te same wykładniki krytyczne.
4.1
Teoria Landaua ciągłych przejść fazowych
Teoria Landaua jest genialna przynajmniej z dwóch powodów 2 i chociażby z tej przyczyny
muszę tu o niej wspomnieć. Po pierwsze jest absolutnie uniwersalna i opisuje wszystkie
bez wyjątku ciągłe przejścia fazowe przy pomocy tego samego formalizmu. Po drugie, co
jest chyba jeszcze bardziej fenomenalne, tłumaczy zjawisko, którego istotą są fluktuacje,
zupełnie te fluktuacje zaniedbując.
Teoria Landaua pierwotnie została zaproponowana do opisu przejść fazowych ciągłych
i oparta jest na dwóch założeniach:
2
czytaj więcej w J. Sznajd ”Introduction to the modern theory of phase transitions” w ”Patterns of
Symmetry Breaking” H. Arodz et al. (eds.) 139-159 (2003) Kluwer Academic Publisher
24
• Dla każdego przejścia ciągłego można znaleźć wielkość, która spełnia rolę miary
uporządkowania układu - parametr porządku.
• Potencjał termodynamiczny można w pobliżu punktu krytycznego rozwinąć w szereg
potęgowy względem parametru porządku.
O parametrze porządku już wspominaliśmy, przypomnijmy tylko, że powinien on mieć
następujące własności:
• W fazie nieuporządkowanej (o wyższej symetrii) φ = 0, a w fazie uporządkowanej
(o niższej symetrii) φ 6= 0.
• Parametr porządku musi dążyć do zera w sposób ciągły gdy T → Tc .
• Poniżej punktu krytycznego parametr porządku nie jest w pełni określony przez
warunki zewnętrzne i przy tych samych warunkach może przybierać dwie lub więcej
różnych wartości.
Potencjał termodynamiczny, np. energię swobodną Gibbsa G = U + xX − T S możemy
przedstawić jako funkcje zmiennych termodynamicznych X, T oraz φ, przy czym φ powinno być wyznaczone z minimalizacji G przy zadanych X, T . Przypomnijmy, że X jest
odpowiednią siłą uogólnioną, np. ciśnieniem XX = X) dla cieczy lub polem (X = h) dla
magnetyka, a x jest odpowiednią współrzędną uogólnioną (np. V lub M odpowiednio).
Ponieważ zakładamy, że zmiana stanu w pobliżu punktu krytycznego odbywa się w sposób ciągły, a więc G przybiera dowolnie małe wartości to możemy G(X, T, φ) rozwinąć w
szereg potęgowy Taylora względem φ.
Myślę, że wszyscy pamiętają jak wygląda rozwinięcie w szereg Taylora. Na wszelki
wypadek przypomnijmy sobie, że każda funkcja f (z) analityczna wewnątrz pewnego koła
o środku a, może być w każdym punkcie tego koła przedstawiona jednoznacznie w postaci
szeregu potęgowego:
f (z) =
∞
X
cn (z − a)n =
n=0
∞
X
f (n) (a)
(z − a)n .
n!
n=0
(4.8)
Wobec tego:
G(X, T, φ) = G0 + αφ + Aφ2 + βφ3 + Bφ4 + . . . ,
(4.9)
Jak już mówiliśmy równaniem stanu może być równanie fundamentalne (reprezentacja
U lub S) lub dowolny potencjał termodynamiczny. Okazuje się, że również warunek równowagi może być sformułowany w każdej z wymienionych reprezentacji. W reprezentacji
Gibbsa i dla X = p (tzn. gdy stan układu zadajemy potencjałem Gibbsa) warunek równowagi brzmi: Wartość równowagowa dowolnego parametru układu będącego w kontakcie
z termostatem o ustalonej temperaturze Tr i ciśnieniu pr minimalizuje potencjał Gibbsa
w stałej temperaturze T = Tr i ciśnieniu p = pr . Warunek ten można wyprowadzić z
warunku minimalizacji energii wewnętrzej U (patrz H.B. Callen ”‘Thermodynamics”’).
Wobec tego, z warunku równowagi w reprezentacji Gibbsa:
α=
∂G
∂φ
!
25
= 0.
X,T
(4.10)
Jeżeli ponadto rozważamy układy symetryczne ze względy na zmianę φ → −φ, to współczynniki również β = 0 i otrzymujemy:
G(X, T, φ) = G0 + Aφ2 + Bφ4 + . . . .
(4.11)
Warunek równowagi stabilnej jest następujący:
∂G
= 2φ(A + 2Bφ2 ) = 0
∂φ
∂ 2G
= 2(A + 6Bφ2 ) > 0.
∂φ2
(4.12)
(4.13)
Z pierwszego warunku otrzymujemy natychmiast dwa rozwiązania:
φ=0
(4.14)
φ = ± −A/2B.
(4.15)
q
q
Wiemy, że φ = 0 odpowiada fazie nieuporządkowanej, a φ = ± −A/2B fazie uporządkowanej, czyli biorąc pod uwagę drugi warunek:
∂ 2G
= 2A > 0 ⇒ A > 0
∂φ2
∂ 2G
= −4A > 0 ⇒ A < 0.
∂φ2
Faza nieuporządkowana:
Faza uporządkowana:
(4.16)
(4.17)
Wynika stąd, że w punkcie przejścia A zmienia znak. Landau założył najprostszą możliwą
postać A spełniającą ten warunek, tzn. A = a(T −Tc ). To założenie natychmiast prowadzi
do wyniku:
q
q
φ = ± −a(T − Tc )/2B = ± −a/2B(T − Tc )1/2 ∼ (T − Tc )β .
(4.18)
Oczywiście jeżeli:
A = a(T − Tc ) =
A > 0 T > Tc
A < 0 T < Tc
A = 0 T = Tc
(FN)
(FU)
(4.19)
to wówczas warunek stabilności w T = Tc :
∂ 2G
= 2(A + 6Bφ2 ) = 12Bφ2 > 0 ⇒ B > 0.
2
∂φ
4.1.1
(4.20)
Ciepło właściwe i entropia dla B > 0
Dla B > 0 teoria Landaua opisuje nam ciągłe przejścia fazowe. Co się dzieje przy takim
przejściu z entropią? Pamiętamy, że przy ciągłych przejściach fazowych nie ma ciepła
przemiany, a co za tym idzie skoku entropii. Czy rzeczywiście teoria Landaua prawidłowo
opisuje tę własność ciągłych przejść fazowych? Obliczmy wartość entropii w obu fazach
- nieuporządkowanej S N oraz uporządkowanej S U . Najpierw musimy obliczyć wartość
potencjału w obu fazach. Korzystając z naszych rozwiązań:
φ=0q
φ = ± −A/2B
A = a(T − Tc )
26
(FN)
(FU)
(4.21)
Otrzymujemy:
GN = G0
(4.22)
a
a
(T − Tc ) = F0 −
(T − Tc )2
2B
2B
(4.23)
2
GU = G0 − a(T − Tc )
Czyli odpowiednie entropie:
∂GN
∂F0
= |F N → φ = 0| = −
= S0
∂T
∂T
∂GU
∂F0 a2
a2
SU = −
=−
− (T − Tc ) = S0 − (T − Tc ).
∂T
∂T
B
B
SN = −
(4.24)
(4.25)
W punkcie przejścia tzn. dla T = Tc mamy:
S N − S U = S0 − S0 + 0 = 0
(4.26)
czyli nie ma skoku entropii zgodnie z obserwacją doświadczalną.
A jak zachowuje się ciepło właściwe?
cN = T
∂S N
a2
∂S U
= c0 cU = T
= c0 − Tc
∂T
∂T
B
(4.27)
czyli:
a2
6= 0.
(4.28)
B
Czyli w przypadku ciągłych przejść fazowych mamy do czynienia ze skokiem ciepła
właściwego przy jednoczesnym braku skoku entropii. Przypomnijmy tu definicję indeksu
krytycznego związanego z zachowaniem się w pobliżu punktu krytycznego ciepła właściwego (patrz tabela 4.2): c ∼ |T − Tc |−α . Wobec tego otrzymujemy natychmiast, że w teorii
Landaua α = 0 (bo w cieple właściwym nie ma zależności od temperatury w żadnej z
faz).
W ten sposób wyznaczyliśmy w teorii Landaua dwa indeksy krytyczne: α = 0, β = 1/2.
Z teorii tej można wyznaczyć dalsze indeksy δ = 3 i γ = 1 odpowiedzialne za zachowanie
się podatności magnetycznej (w zależności od pola magnetycznego i temperatury). Zainteresowanych odsyłam do podręcznika J. Klamuta i innych ”‘Wstęp do fizyki przejść
fazowych”’.
δc = cN − cU = Tc
4.1.2
Uogólnienie: B ujemne
Ten rozdział nie jest obowiązkowy dla studentów ekonofizyki. Jedyne co powinni zapamiętać to fakt, że dla B < 0 istnieje zakres temperatur, dla których mogą istnieć dwie
fazy i wobec tego dla B < 0 teoria Landaua opisuje przejścia nieciągłe. Zainteresowanych
(i fizyków teoretyków) zapraszam do dalszej lektury rozdziału i samodzielnejo wykonania
kilku rachunków.
Widzieliśmy, że warunek równowagi stabilnej w punkcie T = Tc nałożył warunek
na współczynnik B > 0. Co jednak stałoby się gdyby B < 0. Wówczas w rozwinięciu
potencjału termodynamicznego uwzględnia się wyższe potęgi:
G(X, T, φ) = F0 + Aφ2 + Bφ4 + Cφ6 .
27
(4.29)
Teraz już nie można założyć, że przejście występuje dla A = 0. Przyjmijmy jednak przez
analogię z poprzednim przypadkiem, że A = a(T − Θ), chociaż oczywiście Θ nie jest teraz
temperaturą przejścia (nie wiemy w ogóle na razie czym jest). Warunkiem koniecznym
dla istnienia minimum potencjału (a co za tym idzie równowagi) jest oczywiście:
∂G
= 2φ(A + 2Bφ2 + 3Cφ4 ) = 0.
∂φ
(4.30)
Podobnie jak poprzednio możliwe są dwa rozwiązania φ = 0 i φ 6= 0. Napiszmy dodatkowo
warunek równości potencjałów:
GN = 0
GU = F0 + Aφ2 + Bφ4 + Cφ6
GN = GU ⇒ φ2 (A + Bφ2 + Cφ4 ) = 0
(4.31)
Mamy więc układ równań, który pozwala wyznaczyć φ w fazie uporządkowanej oraz temperaturę równych energii stanów N i U (ćwiczenia).
A + 2Bφ2 + 3Cφ4 = 0
A + Bφ2 + Cφ4 = 0
(4.32)
Z tego otrzymujemy w punkcie równych energii φ2 = −2A/B oraz A = B 2 /4C. Podstawiając A = a(T − Θ) dostajemy, że temperatura, w której energie obu stanów są równe
to:
B2
T0 = Θ +
.
(4.33)
4aC
To wyrażenie ma sens przy założeniu, że współczynniki B i C są w szerokim zakresie
niezależne od temperatury, co nie zawsze musi być prawdziwe. Na razie jednak załóżmy,
że z pewnym przybliżeniem można tak przyjąć. Wówczas w punkcie równych energii:
A
B2
B
= −2
=−
(4.34)
B
4CB
2C
Oczywiście warunek konieczny minimum potencjału pozwala wyznaczyć φ również poza
punktem równych energii (przeliczyć to na ćwiczeniach):
√
−B ± B 2 − 3AC
2
φ =
.
(4.35)
3C
Jeżeli C > 0 to wówczas jedynym fizycznym rozwiązaniem jest:
√
−B + B 2 − 3AC
2
φ =
.
(4.36)
3C
φ2 = −2
Ostatecznie okaże się, że mamy zakres temperatur A ∈ [0, B 2 /3C], dla których mogą istnieć dwie fazy. W punkcie A = 0 φ2 = −2B/3C, natomiast w punkcie równych
energii A = B 2 /3C, φ2 = −B/2C. W punkcie powyżej, którego faza U nie może być
już realizowana (wartość wyrażenia pod pierwiastkiem zmienia znak - nie ma już rozwiązań rzeczywistych): A = B 2 /3C, φ2 = −B/3C. Dla A ∈ [0, B 2 /3C] mogą istnieć dwie
fazy, przy czym dla A < B 2 /4C warunek minimum absolutnego spełnia faza U , a dla
A > B 2 /4C faza N . Przy przejściu w punkcie równych energii tzn. dla A = B 2 /4C skok
parametru porządku wynosi φ2 = −B/2C. Wobec tego dla B < 0 teoria Landaua opisuje
przejścia nieciągłe.
28
4.1.3
Gdzie są fluktuacje?
Jak już wielokrotnie podkreślałam, fluktuacje odgrywają niezwykle istotną, można powiedzieć fundamentalną rolę w przejściach fazowych. Nie tylko determinują zachowanie się
wielkości w pobliżu przejścia, ale przede wszystkim samo przejście. A jednak, przedstawiona w tym rozdziale teoria Landaua całkowicie zaniedbuje fluktuacje parametru porządku.
Fluktuacje te jednak można wprowadzić zapisując parametr porządku w znanej już nam
formie:
φ(ri ) = φ + δφ(ri ),
(4.37)
gdzie δφ(ri ) opisuje fluktuacje parametru porządku w punkcie ri . Założenie, które zrobił Landau polegało na przyjęciu φ(ri ) = φ, czyli δφ(r) = 0. Rozszerzeniem jego teorii
jest tzw. teoria Landaua-Ginsburga, która uwzględnia występowanie fluktuacji (najniższy
rząd) w układach izotropowych. Teoria ta
Jak wiemy w przypadku fluktuacji parametru porządku funkcję korelacyjną możemy
zapisać jako:
G(ri , rj ) = hφ(ri )φ(rj )i =< φ(ri ) >2 + hδφ(ri )δφ(rj )i
(4.38)
Jeżeli dopuścimy zależność parametru porządku od położenia to w rozwinięciu Landaua, obok wyrazów proporcjonalnych do φ(r) musimy uwzględnić również pochodne
parametru porządku względem zmiennych przestrzennych. Dla układu izotropowego najniższego rzędu wyraz tego rodzaju ma postać c[∇φ(r)]2 . Wykorzystując dla tak zmodyfikowanego rozwinięcia warunek na minimum funkcjonału G otrzymamy wówczas wspominaną już wcześniej postać funkcji korelacyjnej (postać Orsteina-Zernike):
Gzw (r) ∼
exp − rξ
rd−2−η
.
(4.39)
W 2003 roku Nagrodę Nobla z fizyki dostali: Witalij Ginzburg (Rosja) i Aleksiej A.
Abrikosow (Rosja, a ostatnio USA) za ”pionierski wkład do teorii nadprzewodnictwa”
oraz Anthony J. Leggett (Wielka Brytania i ostatnio USA) za ”pionierski wkład do teorii
nadciekłości”.
Fragment wykładu Noblowskiego wygłoszonego przez Alexeia
A. Abrikosova 8 grudnia 2003:
In 1950, Vitalii Ginzburg and Lev Landau published their famous paper on
the theory of superconductivity. The approach was based on the general theory
of the second order phase transitions proposed by Landau in 1937. There
Landau introduced the main variable, the so called “order parameter” which
was finite below the transition and zero above it. Different phase transitions
had different order parameters, and whereas it was evident for, e. g., the
ferromagnetic transition, namely, the spontaneous magnetization, it was far
less evident for the superconducting transition. Ginzburg and Landau had a
stroke of genius, when they chose, as the order parameter some sort of wave
function. (...)
Fragment artykułu ”‘Nobel z fizyki: za nadprzewodnictwo i
nadciekłość”’, Gazeta Wyborcza 07.10.2003
Nagrodą Nobla nagrodzono fizyków, których teorie pomogły okiełznać dwa
niezwykłe zjawiska przyrody: nadprzewodnictwo (w materiałach, w których
29
prąd elektryczny płynie bez żadnych strat energii) oraz nadciekłość (w cieczy,
która nie ma lepkości, a więc każdy wir trwa w niej wiecznie).
Jak płynie wieczny prąd
Zacznijmy od elektryczności, bo to ona stała u podstaw rewolucji technicznej XX wieku. W powietrzu, w wodzie i na ziemi siła tarcia hamuje wszystko,
co się porusza. Podobnie prąd elektryczny, czyli strumień elektronów, napotyka opór w metalach, nawet dobrych przewodnikach. Opór sprawia, że energia
prądu się rozprasza, a materiał, przez który płynie prąd, rozgrzewa się. Dobrze
o tym wie każdy, kto trzymał w ręce rozgrzane prądem żelazko. Dzięki temu
również świeci rozżarzone do białości włókno żarówki.
Niespodziewanie na początku XX wieku holenderski fizyk Heike KamerlinghOnnes odkrył, że istnieją materiały, w których opór elektryczny całkowicie
znika. W odróżnieniu od zwykłych przewodników (np. miedzi, aluminium)
nazwano je nadprzewodnikami, a samo zadziwiające zjawisko - nadprzewodnictwem. W pętli wykonanej z nadprzewodnika prąd będzie krążył wiecznie,
bo jego energia nie ulegnie rozproszeniu.
Praktyczne równania
Przez niemal pół wieku bezskutecznie starano się wyjaśnić to zjawisko.
Dopiero na początku lat 50. rosyjscy uczeni Lew Landau i Witalij Ginzburg
przedstawili równania, które świetnie radziły sobie z opisem własności nadprzewodników. Wprawdzie nie tłumaczyły one, co takiego dzieje się z prądem w mikroskali - na poziomie elektronów (to dopiero później było zasługą
tzw. teorii BCS nagrodzonej Noblem), ale teoria okazała się nieoceniona dla
praktycznego wykorzystania nowych materiałów w technice i badaniach naukowych.
Niecałą dekadę później Aleksiej Abrikosow wykorzystał ich metodę do opisu tzw. nadprzewodników II rodzaju, których ”cudowne” własności nie znikają
nawet w silnych polach magnetycznych. Dzięki temu nadprzewodniki zaczęły
robić wielką karierę w badaniach naukowych. Konstruuje się z nich silne elektromagnesy, w które są wyposażone najlepsze laboratoria - np. akceleratory i
detektory cząstek elementarnych. Korzysta się z nich w medycynie - w szpitalnych tomografach, skanerach rezonansu jądrowego i dosłownie wszędzie tam,
gdzie potrzeba silnego pola magnetycznego.
Cieplej, coraz cieplej
Do niedawna nadprzewodniki musiały być schładzane ciekłym helem, który skrapla się w temperaturze minus 269 st. C. W połowie lat 80. okazało się,
że nadprzewodnictwo nie jest ograniczone wyłącznie do temperatur zbliżonych
do zera bezwzględnego. Odkryto materiały ceramiczne, które nadprzewodzą
w wyższych temperaturach. Dziś trwa pogoń za takimi nadprzewodnikami,
w których prąd będzie płynąć wiecznie w temperaturze takiej, jaka panuje na
powierzchni Ziemi. Dlaczego? Można byłoby z nich zbudować linie przesyłowe,
które dostarczą prąd z elektrowni do domów i fabryk bez kosztownych strat
(dziś po drodze traci się średnio 30 proc. energii). Mogłyby powstać elektromagnesy, które nie będą wymagały nieustannego i kosztownego chłodzenia,
a z ich pomocą - rozpowszechnić pociągi na poduszkach magnetycznych i tanie szpitalne tomografy. Dalszej miniaturyzacji uległaby też elektronika (dziś
procesory nie mogą mieć zbyt małych rozmiarów, bo przegrzewają się).
30
Stare teorie, których podstawy ułożyli m.in. Ginzburg i Abrikosow, są
wciąż używane, również do opisu nadprzewodników nowego typu i mogą przyczynić się do prawdziwej rewolucji technologicznej. I pewnie dlatego spotkały
się z uznaniem Komitetu Noblowskiego. Można też podejrzewać, że nadrabia
on opóźnienia w nagradzaniu często kiedyś niedocenianych osiągnięć naukowców, którzy pracowali w b. ZSRR.
Jak wiecznie wiruje ciekły hel
Jury noblowskie jednocześnie nagrodziło Anthony’ego J. Leggetta za teoretyczny opis zachowania się ciekłego helu-3 w niskiej temperaturze. Ale co ma
wspólnego ciekły hel z wiecznie płynącym prądem? Wbrew pozorom wiele.
Gdy hel zostanie schłodzony prawie do zera bezwzględnego, z cieczy podobnej do tych, jakie znamy na co dzień, zmienia się w ciecz kwantową. Traci
lepkość, co oznacza, że gdy np. wiruje, nie traci energii na wewnętrzne tarcie
i może poruszać się bez końca. Jego cieniutka warstewka przykleja się i ślizga
po powierzchni, może np. ”wypełznąć” po ściankach z naczynia. Deszcz z nadciekłego helu swobodnie przeciekałby przez parasole, bo przeciska się on nawet
przez najmniejsze dziurki rzędu zaledwie dziesiątek mikrometrów. Rosyjski fizyk Piotr Kapica, który po raz pierwszy zaobserwował to dziwne zjawisko,
nazwał je nadciekłością. Okazuje się przy tym, że atomy nadciekłego helu-3
zachowują się podobnie jak elektrony prądu, które bez straty energii płyną w
nadprzewodniku.
31
32
Rozdział 5
Model Perkolacji w Ekonomii
5.1
Model Conta-Bouchaud
Model został zaproponowany przez dwóch fizyków, a obecnie finansistów, Rama Conta
i Jean-Philippa Bouchaud (Rama Cont i Jean-Philipp Bopuchaud, HERD BEHAVIOR
AND AGGREGATE FLUCTUATIONS IN FINANCIAL MARKETS, Macroeconomic
Dynamics, 4, 170–196 (2000)). Rozważmy układ składający się z N agentów, oznakowanych przez liczby naturalne 1 ¬ i ¬ N , handlujących w pewnym dobrem, którego cenę
w chwili t oznaczymy przez x(t). W każdym przedziale czasowym (każdej chwili czasu)
agent może albo kupować albo sprzedawać albo w ogóle nie handlować. Dla uproszczenia
przyjmiemy, że w każdym przedziale czasowym agent może handlować tylko pojedynczą
jednostką kapitału. Wobec tego stan każdego agenta i reprezentowany jest przez zmienną
losową φi = 0, −1, 1, przy czym:
-1 bear
0
φi =
1 bull
chce sprzedać
nie handluje
chce kupić
(5.1)
Skumulowany nadmiar popytu nad podażą w chwili t jest wobec tego:
D(t) =
N
X
φi (t).
(5.2)
i=1
Zakładamy, że początkowy rozkład roszczeń agentów jest symetryczny, tzn.
P (φi = +1) = P (φi = −1) = a0.5cmP (φi = 0) = 1 − 2a.
(5.3)
Wobec tego średnio D = 0 czyli układ fluktuuje wokół stanu równowagi.
Pojawia się teraz pytanie jak zdefiniować cenę lub jej zmianę (tzw. zwrot). Autorzy
założyli, że zwrot jest proporcjonalny do D, czyli:
∆x = x(t + 1) − x(t) =
N
1X
φi (t),
λ i=1
(5.4)
gdzie λ jest parametrem mierzącym wrażliwość ceny na fluktuacje podaży. Oczywiście
związek między nadwyżką podaży a zwrotem ceny nie musi być liniowy i w ogólności
33
kształtowanie się ceny to bardzo złożony proces. Jednak w modelu CB uproszczenia przyjęto zależność liniową
Zacznijmy od najprostszego przypadku, tzn. φi są niezależnymi zmiennymi losowymi
o tym samym rozkładzie (independent identically distributed random variables). W takim
przypadku łączny rozkład agentów jest po prostu rozkładem Gaussa zgodnie z centralnym twierdzeniem granicznym. Jednakże agenci w prawdziwym rynku nie są niezależni.
Musimy jakoś wprowadzić miedzy nimi komunikację. Jedną z możliwości jest założenie
istnienia pewnej struktury komunikacji między agentami, ale pytanie jaka to powinna być
struktura? Wyniki prawdopodobnie silnie zależałyby od wybranej przez nas struktury.
Innym pomysłem jest założenie, że struktura komunikacji na rynku jest stochastyczna.
Jedną z możliwości w takim przypadku są losowe spotkania agentów i że do transakcji
dochodzi wówczas gdy agent który chce sprzedać spotka takiego, który chce kupić. Taka
procedura nosi w literaturze nazwę random matching (RM). Innym pomysłem na wygenerowanie losowej struktury jest rozważenie klastrów jakie tworzą agenci poprzez proces RM
i założenie, że handel nie odbywa się wewnątrz grup, ale wszyscy agenci należący do tego
samego klastra dostosowują się do pewnej wspólnej strategii. Różne grupy mogą ze sobą
nawzajem handlować. Takie klastry mogą reprezentować grupy inwestorów. Taki właśnie
pomysł pojawił się w pracy Conta-Bouchaud. Teraz przejdźmy do bardziej szczegółowego
opisu modelu.
Załóżmy, że wszyscy agenci należący do danego klastra mają takie same żądanie φα ,
gdzie α = 1...k indeksuje klastry. Wobec tego:
∆x =
1X
kWα φα (t),
λ α=1
(5.5)
gdzie Wα jest wielkością klastra, a φalpha (wspólną) decyzją agenta w danym klastrze α.
Klaster tworzą agenci, którzy są połączeni. Niech pij będzie prawdopodobieństwem, że
agenci i i j są połączeni. Dla uproszczenia załóżmy, że wszystkie połączenia są równo
prawdopodobne, tzn. pij = p. Oczywiście (N − 1)p jest średnią liczbą połączeń agentów
z jednym wybranym agentem. Oczywiście nas interesuje, jak zwykle w teorii przejść fazowych, granica N → ∞. Wobec tego p powinno być tak wybrane, żeby (N − 1)p miało
lim
skończoną granicę N → ∞ (N − 1)p = c. Naturalnym wyborem jest pij = p = c/N ,
gdzie c mierzy stopień sklastrowania agentów. Taka struktura znana jest jako graf losowy
(random graph). Można pokazać, że jeżeli c = 1 wówczas rozkład wielkości klastrów dany
jest prawem potęgowym:
A
(5.6)
P (W ) ∼ 5/2 ,
W
podczas gdy dla c < 1, ale takich, że (0 < 1 − c << 1) rozkład wielkości klastrów jest
obcięty przez wykładniczy ogon tzn.
A
(c − 1)W
P (W ) ∼ 5/2 exp −
W
W0
!
.
(5.7)
Oznacza to, że dla c = 1 rozkład ma nieskończoną wariancję, podczas gdy dla c < 1
wariancja staje się skończona.
34
5.2
Samoorganizujący się model perkolacji fluktuacji
na rynku finansowym
W roku 1999 Dietrich Stauffer i Didier Sornette zaproponowali modyfikację powyższego
modelu. Model C-B zakładał, że inwestorzy są połączeni z pewnym prawdopodobieństwem
i w ten sposób tworzą klastry. Następnie utworzone losowo klastry (tzn. wszyscy inwestorzy w danym klastrze) podejmują decyzję kupić z prawdopodobieństwem a czy sprzedać
z a, czy też nie handlować z prawdoodobieństwem 1 − 2a. To jest w gruncie rzeczy idea
oparta na modelu perkolacji. W modelu C-B założono dodatkowo, że zwrot ceny zależy
liniowo od różnicy między popytem a podażą. Dla małych a zwykle handluje najwyżej
jeden klaster i w konsekwencji rozkład zwrotów P (R) skaluje się zgodnie z dobrze znanym
rozkładem wielkości klastrów w teorii perkolacji. Dla dużej aktywności a i bez nieskończonego klastra (p < pc ), zwroty są sumą wielu klastrów i wówczas zgodnie z centralnym
twierdzeniem granicznym rozkład jest normalny (Gaussowski). Dla niskiej aktywności a
w progu perkolacji p = pc , kiedy pojawia się nieskończony klaster obserwujemy prawo potęgowe. Dla p 6= pc liczba klastrów zanika wykładniczo (p < pc ) lub stretched exponential
(p > pc ).
Czasowe korelacje zmienności można zmierzyć pozwalając inwestorom powoli dyfundować do najbliższego sąsiedztwa. Ta dyfuzja pozwala na zmianę w czasie grup inwestycyjnych. Przypomnijmy, że zmienność jest zdefiniowana jako wartość bezwzględna ze zwrotu
i jej korelacje czasowe powinny być dalekozasięgowe w przeciwieństwie do korelacji czasowych samych zwrotów. Zmienność zachowuje się podobnie jak średnia wielkość klastra i
czasowe korelacje spowodowane są powolną dyfuzją z typowym zanikiem wolniejszym niż
wykładniczy. Wobec tego model C-B w progu perkolacji zgadza się jakościowo (ale nie
ilościowo) z trzema znanymi własnościami rynku (stylized facts):
1. średni zwrot R = 0, pod warunkiem, że nie ma inflacji i odrzucimy inne stale trendy,
2. ogon rozkładu zwrotów P (R) zanika zgodnie z prawem potęgowym
3. Czasowa korelacja zmienności V (t) =< R(t)2 >1/2 zanika powoli do zera.
Pojawia się pytanie:
1. Dlaczego rynek miałby coś wiedzieć w progu perkolacji i pracować właśnie w tym
progu?
Żeby poradzić sobie z tym problemem zaproponujemy teraz pewną modyfikację C-B.
Dlaczego p = pc ? Nowy pomysł polega na tym, że p w ogóle nie musi być stałe. Nie ma
powodu, żeby tak było. Jak zmieniać p? Najprościej wybierać nowe losowe p w każdym
kroku czasowym. W konsekwencji rozkład zwrotów będzie uśrednieniem po
35
36
Rozdział 6
Modele
Ten rozdział jest w trakcie uzupełniania - zachęcam do korzystania z literatury, notatek
z wykładu oraz prezentacji PPT dostępnej na panoramixie.
37
38
Rozdział 7
Co wiemy na pewno? - czyli ścisłe
wyniki w teorii przejść fazowych
Ten rozdział jest w trakcie uzupełniania - zachęcam do korzystania z literatury i notatek
z wykładu.
7.0.1
Jednowymiarowy model Isinga z polem i dwuwymiarowy
bez pola.
7.0.2
Model Perkolacji typu bond na sieci kwadratowej.
7.0.3
Twierdzenie van Hove’a
Żaden układ o skończonym zasięgu oddziaływań nie może wykazywać dalekiego porządku
w temperaturach wyższych od zera.
7.0.4
Twierdzenie Mermina-Wagnera
Twierdzenie Mermina-Wagnera mówi, że w jedno- i dwuwymiarowych sieciowych układach spinowych nie istnieje uporządkowanie dalekiego zasięgu w dodatnich temperaturach,
jeśli układ posiada ciągłą grupę symetrii (jak np. model Heisenberga lub XY). Twierdzenie to, mimo iż jest znane od 40 lat, ciągle jest jednym z ważniejszych faktów w dziedzinie
przejść fazowych. Zainteresowanych odsyłam do pracy źródłowej, która ukazała się w roku
1966 w niezwykle prestiżowym czasopismie fizycznym Physical Review Letters (PRL): N.
D. Mermin and H. Wagner ’Absence of Ferromagnetism or Antiferromagnetism in one- or
two-dimensional isotropic Heisenberg models’, PRL 17, 1133 (1966)
39
40
Rozdział 8
Metoda Średniego Pola - Mean Field
Approximation (MFA)
Teoretyczny opis zjawiska fizycznego składa się zazwyczaj z trzech etapów:
1. Skonstruowania lub wyboru spośród już istniejących odpowiedniego modelu.
2. Rozwiązania modelu, a więc wyznaczenie wielkości mierzalnych eksperymentalnie.
3. Interpretacji otrzymanych wyników.
Podstawą etapów pierwszego i trzeciego jest coś nie do końca zdefiniowanego, a nazywanego zwykle intuicją fizyczną. Natomiast etapu drugiego umiejętność sensownego ”psucia
matematyki”, tzn. umiejętność wyboru i zastosowania właściwego przybliżenia, które będzie na tyle proste, że da się efektywnie zastosować, a jednocześnie na tyle wiarygodne, że
nie będzie zachodziła obawa, iż otrzymane wyniki bardziej zależą od użytego przybliżenia
niż od rozważanego modelu. Najprostszą możliwie teorią, a jednocześnie bardzo ważną
jest teoria pola średniego MFA. W wielu skomplikowanych problemach fizyki statystycznej jest to praktycznie jedyne dostępne narzędzie badawcze. Chociaż przybliżenie MFA
jest bardzo grube i niekiedy całkowicie błędne, to prostota tej metody zapewnia jej ciągle ważne miejsce w mechanice statystycznej, a do końca lat 60-tych była ona właściwie
jedyną teorią przejść fazowych.
Podstawowym problemem przy analizie układów doznających przejść fazowych jest konieczność uwzględnienia ogromnej liczby stopni swobody istniejących w takim układzie.
W najmniejszym układzie, który możemy uznać za makroskopowy mamy do czynienia z
N ∼ 102 3 cząstek, z których nawet w najprostszym modelu Isinga każda ma dwa stopnie
swobody, a więc układ może zajmować 2N stanów. Przy takiej ogromnej liczbie stanów
znalezienia sumy stanów jest oczywiście zadaniem beznadziejnym. Naturalną drogą postępowania jest więc wybranie małego kawałka badanego układu i analizując własności
tego kawałka próba odtworzenia własności całego układu. Najprostszym wyborem jest
oczywiście ograniczenie się tylko do jednego elementu badanego układu, a więc np. do
jednego spinu i zastąpienie oddziaływania tego spinu z pozostałymi pewnym polem zwanym polem molekularnym, albo polem średnim. Oznacza to, oczywiście, założenie, że w
każdym miejscu układu mamy ten sam obraz, a każdy element (spin) jest niezależny i
porusza się w ustalonym otoczeniu określonym przez średnią wartość takich niezależnych
ruchów. Innymi słowy podstawowe założenie teorii pola średniego mówi, że przy badaniu
własności danego układu można zaniedbać wszelkie fluktuacje. To oczywiście nie zawsze, a
41
nawet nieczęsto jest prawdę. W szczególności wiemy, już że w pobliżu punktu krytycznego
fluktuacje stają się nieskończone, więc założenie MFA wydaje się zupełnie bezsensowne.
Zwykle gdy opowiadam o tym studentom, wybałuszają oczy i mówią, że to nie możliwe żeby robić takie rzeczy ... Cóż nie od dzisiaj wiadomo, że fizycy to czarodzieje (albo oszuści,
jak mówią zazdrośnicy). Prawdą jest, że z oczywistych powodów metoda pola średniego
nie zawsze daje dobre wyniki, ale z drugiej strony często jest jest jedyną dostępną metodą
analityczną. Z tego też powodu, przez kilka następnych godzin zatrzymamy w świecie
średniego pola i zobaczymy jak w tym świecie wyglądają różne znane nam już i nieznane
jeszcze modele.
Punktem wyjścia dla metod przybliżonych jest twierdzenie Peierlsa i właśnie od niego
zaczniemy wykład poświęcony MFA.
8.0.5
Twierdzenie Peierlsa
Twierdzenie Peierlsa mówi tyle, że modelowe (przybliżone) wyrażenie dla sum stanów leży
poniżej ścisłej wartości. Dowód tego twierdzenia zainteresowani mogą znaleźć w skrypcie
do wykładu Pękalskiego z teorii przejść fazowych.
8.0.6
Metoda MFA dla modelu Isinga
Oczywiście hamiltonian modelu Isinga bez pola wszyscy już znakomicie pamiętają, ale
dla porządku zapiszmy:
X
H = −J
Si Sj .
(8.1)
<i,j>
Pamiętacie jeszcze tą sztuczkę?
Si =< Si > +δSi = m + δSi .
(8.2)
Wstawiając to do hamiltonianu otrzymujemy:
H = −J
X
(m + δSi )(m + δSi ) = −J
<i,j>
2
X
(m2 ) + mδSi + mδSj + δSi δSj )
<i,j>
= N Jzm − 2mJz
X
i
Si − J
X
δSi δSj ,
(8.3)
<i,j>
gdzie z to liczba najbliższych sąsiadów. Żeby nie było załatwo to oczywiście policzymy
to dokładnie na ćwiczeniach. Na razie musicie uwierzyć na słowo, że wynik jest właśnie
taki. Przybliżenie pola średniego polega na pominięciu fluktuacji, a więc średnio-polowy
Hamiltonian Isinga ma następująca postać:
HM F A = N Jzm2 − 2mJz
X
Si .
(8.4)
i
Jak widać więc założenie o braku fluktuacji doprowadziło nas do wyniku, że hamiltonian
można przedstawić jako sumę dwu członów - pewnej stałej N Jzm2 oraz oddziaływania
P
pojedyńczej cząstki z pewnym efektywnym polem −2mJz i Si . Teraz jak to zwykle bywa
musimy policzyć sumę stanów, a następnie energię swobodną itd. Ale to już zostawmy
sobie na ćwiczenia.
42
8.0.7
Metoda MFA dla modelu Perkolacji
Bardzo lubię ten przykład zastosowania metody średniego pola, ponieważ pokazuje on, że
czasami średnie pole potrafi wyprodukować przejście fazowe tam gdzie wcale go nie ma.
Mam nadzieję, że wszyscy pamiętają model perkolacji. Rozważmy problem perkolacji
wiązań. Interesuje nas więc pytanie jaka jest krytyczna wartość koncentracji wiązań (mostów), przy której powstanie nieskończony klaster. Niech prawdopodobieństwo tego, że
dwa dowolne węzły sieci są połączone (tzn. że istnieje wiązanie) wynosi p, a prawdopodobieństwo, że i-ty węzeł należy do nieskończonego klastra Pi . Oczywiście prawdopodobieństwo tego, że węzeł i-ty nie należy do nieskończonego klastra jest równe 1 − Pi . Żeby dany
węzeł należał do nieskończonego klastra to musi on mieć przy najmniej jednego sąsiada j,
z którym jest połączony mostem, i który sam należy do nieskończonego klastra. Prawdopodobieństwo tego jest równe iloczynowi prawdopodobieństw pPj . Prawdopodobieństwo
tego, że sąsiad j-ty nie spełnia tych warunków jest równe 1 − pPj . Zakładając, że liczba
najbliższych sąsiadów jest równa z mamy:
1 − Pi =
z
Y
(1 − pPj ).
(8.5)
j=1
Założenie średniego pola mówi, że ”w każdym punkcie układu mamy to samo”, czyli
∀i Pi = P , czyli w przybliżeniu MFA otrzymujemy:
1−P =
z
Y
(1 − pP ) = (1 − pP )z .
(8.6)
j=1
Wyobraźmy sobie teraz układ jednowymiarowy. Jak myślicie jakie musi być p, żeby postał
nieskończony klaster? Oczywiście, jeżeli zabraknie tylko jednego mostu to już nie przejdziemy z jednego końca układu na drugi, a to znaczy, że nie będzie istniał nieskończony
klaster. Czyli dla sieci jednowymiarowej p musi być równe jeden, żeby istniał nieskończony
klaster. Nie istnieje więc żadna wartość krytyczna pc . A co mówi wynik średniopolowy?
Dla sieci jednowymiarowej z = 2, czyli mamy:
1−P =
z
Y
(1 − pP ) = (1 − pP )2 .
(8.7)
j=1
To równanie ma dwa rozwiązania P = 0 i P = (2p − 1)/p2 . Oznacza to, że dla p > 1/2
istnieje niezerowe prawdopodobieństwo pojawienia się nieskończonego klastra, bo wówczas
P > 0. Jak widać MFA daje czasami zupełnie absurdalne wyniki
43
44
Rozdział 9
Metody Monte Carlo
Metoda Monte Carlo jest metodą obliczania wielkości dających się przedstawić w postaci
wartości oczekiwanej pewnych rozkładów probabilistycznych. Niech a oznacza poszukiwaną wielkość, może to być na przykład magnetyzacja układu spinów Isinga, i jest wartością
oczekiwaną a = EX pewnej zmiennej losowej X. Jeżeli jesteśmy w stanie generować
niezależne wartości S1 , S2 , ... z rozkładu zmiennej X, to z mocnego prawa wielkich liczb
wynika, że:
1
(9.1)
lim (S1 + ... + Sn ) = a.
n→∞ n
Metoda Monte Carlo polega więc na szacowaniu wielkości a przez średnią z pewnej odpowiednio dobranej n elementowej próby.
W swojej autobiografii, twórca metody Monte Carlo i wybitny polski matematyk, Stanisław Ulam wspomina ”(...) Pomysł ten, nazwany później metodą Monte Carlo, wpadł
mi do głowy, kiedy podczas choroby stawiałem pasjanse. Zauważyłem, że znacznie praktyczniejszym sposobem oceniania prawdopodobieństwa ułożenia pasjansa (takiego jak Canfield, gdzie umiejętności gracza nie mają większego znaczenia) jest wykładanie kart, czyli
eksperymentowanie z procesem i po prostu zapisywanie procentu wygranych, niż próba obliczenia wszystkich możliwości kombinatorycznych, których liczba rośnie wykładniczo i jest
tak wielka, że pomijając najprostsze przypadki, jej oszacowanie jest niemożliwe. (...)”. A
jak sytuacja przedstawia się w przypadku fizyki statystycznej? W najmniejszym układzie
makroskopowym znajduje się przynajmniej N ≈ 1023 cząstek.
Zwykle rzeczywiście nie udaje nam się rozwiązać zagadnień fizyki statystycznej ściśle. W takiej sytuacji metody Monte Carlo są często najbardziej wiarygodnymi spośród
wszystkich metod jakimi dysponuje współczesna fizyka statystyczna. Jak wspominałam,
mocne prawo wielkich liczb zapewnia, że możliwe jest szacowanie różnych wielkości przez
średnie z pewnej odpowiednio dobranej próby. Oczywiście sedno sprawy tkwi w stwierdzeniu ”‘odpowiednio dobranej”’. W jaki sposób należy dobrać próbę w przypadku modeli
fizyki statycznej? Odpowiedź na to pytanie możemy znaleźć w podstawowych postulatach
termodynamiki i fizyki statystycznej:
• Każdy układ przy niezmiennych warunkach zewnętrznych znajduje się w stanie równowagi termodynamicznej, a jeżeli przy takich warunkach nie jest w stanie równowagi to w końcu do stanu równowagi termodynamicznej przechodzi.
• Temperatura jest parametrem określającym równowagę termodynamiczną.
45
• Niech Eα będzie energią mikrostanu oznaczonego indeksem α. Jeżeli układ jest w
równowadze termicznej z termostatem o temperaturze T to prawdopodobieństwo
pα , że układ znajduje się w mikrostanie α jest proporcjonalne do exp(−βEα ), gdzie
β = 1/kB T , kB = 1.38 ∗ 10−23 J ∗ K −1 jest stałą Boltzmanna. To podstawowe założenie fizyki statystycznej często zastępuje się innym, wiążącym entropię z objętością
przestrzeni fazowej, ale dla naszych potrzeb wygodniejsza będzie relacja opisującą
prawdopodobieństwo znalezienia układu w stanie o danej energii.
Z powyżej przyjętego, podstawowego założenia fizyki statystycznej można wyprowadzić wszystkie niezależne od czasu charakterystyki układu w równowadze termodynamicznej. Ponieważ układ zawsze musi być w jednym z możliwych stanów, więc suma z
prawdopodobieństw po wszystkich stanach musi być równa 1. Znormalizowane prawdopodobieństwo (oznaczymy je jako Peq (α), ponieważ jest to prawdopodobieństwo równowagowe) jest więc równe:
Peq (α) ≡ pα =
1
exp(−βEα ),
Z
(9.2)
P
Gdzie czynnik normalizujący Z = α exp(−βEα ) nosi w polskiej literaturze nazwę sumy
stanów (partition function). Rozkład prawdopodobieństwa zdefiniowany wzorem (9.2) nosi
nazwę rozkładu Gibbsa i przy jego pomocy można wyznaczyć średnią termodynamiczną
< X > dowolnej wielkości X:
< X >=
X
α
pα Xα =
X
Peq (α)Xα =
α
X
α
exp(−βEα )
Xα .
l exp(−βEl )
P
(9.3)
Oczywiście, aby obliczyć te średnie musimy znać zarówno wszystkie mikrostany układu,
jak i ich energie oraz wartości Xα jakie przyjmuje X w każdym z mikrostanów.
Z punktu widzenia teorii prawdopodobieństwa X jest niczym innym jak pewną zmienną losową, która może przyjmować jedną z dopuszczalnych wartości Xα zgodnie z rozkładem prawdopodobieństwa Gibbsa pα zadanego wzorem (9.2). Wyobraźmy sobie, że
rozkład prawdopodobieństwa naszej zmiennej losowej zmienia się w czasie. Dla ustalenia
uwagi, niech naszą zmienną losową będzie magnetyzacja:
m=
N
1 X
Si
N i=1
(9.4)
układu N spinów Isinga bez pola zewnętrznego. Początkowo układ znajduje się w pewnym konkretnym stanie początkowym - na przykład wszystkie spiny ustawione są ”‘do
góry”’, tzn. m(0) = m0 = 1 (co odpowiada jednemu z dwóch stanów niskotemperaturowych T → 0, w których ogólnie |m| = 1 ). Rozkład początkowy naszej zmiennej losowej
w tym przypadku jest deltą Diracka Pm (0) = δm,m0 = δm,1 . Interesuje nas natomiast jaka
będzie wartość naszej zmiennej losowej w pewnej temperaturze T = T1 >> 0. Z postulatów fizyki statystycznej wiemy, że układ będzie dążył do równowagi z termostatem, więc
spodziewamy się ewolucji naszej zmiennej losowej. Ewolucja ta ma również swój odpowiednik w teorii prawdopodobieństwa - jest to tak zwany proces stochastyczny. Najprościej
rzecz ujmując, procesem stochastycznym nazwiemy funkcję, która każdej chwili t przypisuje pewną zmienną losową Xt . Warto również zauważyć, że z punktu widzenia fizyki
statystycznej proces stochastyczny można w gruncie rzeczy traktować jako zespół realizacji procesu (tzw. trajektorii). W naszym przykładzie zmienną losową była magnetyzacja,
46
ale z punktu widzenia fizyki statystycznej odpowiedniejszym wyborem dla tego samego
układu byłaby konfiguracja σ opisująca mikrostan układu. W takim przypadku proces
stochastyczny miałby pewną bardzo wygodną własność - byłby procesem markowskim.
9.1
Łańcuch Markowa i równanie Master
Procesy Markowa to procesy stochastyczne polegające na tym, że warunkowe rozkłady
prawdopodobieństwa przyszłych stanów procesu są zdeterminowane wyłącznie przez jego
bieżący stan, bez względu na przeszłość.
Bardzo ważne w symulacjach Monte Carlo i szczególnie interesujące, z punktu widzenia
zastosowań w fizyce, są procesy Markowa, będące łańcuchem Markowa, tzn.
1. Zbiór wartości procesu jest dyskretny
2. Czas jest dyskretny i przyjmuje wartości całkowite
Należy przy tym zauważyć, że nie wszyscy autorzy wymagają spełnienia obu punktów,
a na przykład van Kampenn dodaje do powyższej definicji jeszcze własność stacjonarności.
Najczęściej wymaga się jednak spełnienia tylko drugiej własności - w takim ujęciu łańcuch Markowa jest procesem Markowa z dyskretnym czasem. Badania nad tym niezwykle
ważnym dla fizyki, nowym typem procesu stochastycznego, A. A. Markov rozpoczął już
w 1907.
Zdefiniujmy proces stochastyczny z czasem dyskretnym t1 < t2 < . . . < tn , dla układu
ze skończoną liczbą możliwych stanów σ1 , σ2 , σ3 , . . . , σN . Zmienna losowa Xt opisuje stan
układu w chwili t. Warunkowe prawdopodobieństwo na to, że Xtn = σin można zapisać:
P (Xtn = σin |Xtn−1 = σin−1 , Xtn−2 = σin−2 , ..., Xt1 = σi1 ),
(9.5)
zakładając, że w poprzednim czasie zmienna losowa Xtn−1 była w stanie σin−1 , i etc.
Dla procesu Markowa, w którym prawdopodobieństwo warunkowe jest zależne tylko od
poprzedniego stanu:
P (Xtn = σin |Xtn−1 = σin−1 , ..., Xt1 = σi1 ) = P (Xtn = σin |Xtn−1 = σin−1 ).
(9.6)
Powyższe prawdopodobieństwo warunkowe może być interpretowane jako prawdopodobieństwo przejścia ze stanu i do stanu j
Wij = W (σi → σj ) = P (Xtn = σj |Xtn−1 = σi ).
(9.7)
Wij ­ 0,
Wij = 1,
(9.8)
Spełnia ono warunki:
X
j
które są wymagane dla prawdopodobieństwa przejścia. Możemy zatem, w przypadku łańcucha Markowa, zapisać prawdopodobieństwo P (Xtn = σj ) tego, że w czasie tn układ
znajdzie się w stanie σj jako:
P (Xtn = σj ) = P (Xtn = σj |Xtn−1 = σi )P (Xtn−1 = σi ) = Wij P (Xtn−1 = σi ).
47
(9.9)
Równanie master opisuje dynamikę takiego układu, czyli zmianę prawdopodobieństwa
P w czasie t (przy założeniu, że interwały czasowe są nieskończenie małe możemy przejść
do postaci ciągłej P (Xtn = σj ) = P (σj , t)):
X
X
dP (σj , t)
=−
Wji P (σj , t) +
Wij P (σi , t).
dt
i
i
(9.10)
Równanie to jest zwane także równaniem bilansu czy równaniem fundamentalnym.
Zgodnie z wcześniej wymienionymi postulatami fizyki statystycznej żądamy aby P (σj , t)
osiągnęło rozkład równowagowy Gibbsa:
Peq (σj ) = Z −1 e−E(σj )/T .
(9.11)
Takie żądanie narzuca naturalnie pewne ograniczenia na prawdopodobieństwa przejścia
Wij . Zwykle zakładamy, że prawdopodobieństwa te powinny spełniać warunek równowagi szczegółowej (inaczej warunek mikroodwracalności):
Wji Peq (σj ) = Wij Peq (σi ).
(9.12)
W ogólności układ może nie osiągać stanu równowagowego, lecz jedynie stan stacjonarny,
tzn.
dP (σj , t)
= 0.
(9.13)
dt
W takim przypadku, z równanie fundamentalnego:
X
Wji Pstady state (σj ) =
i
X
Wij Pstady state (σi ).
(9.14)
i
Powyższy warunek nosi nazwę warunku stacjonarności. Naturalnie warunek równowagi szczegółowej jest znacznie silniejszym warunkiem niż warunek stacjonarności, jednak
żaden z nich nie definiuje jednoznacznie prawdopodobieństw przejścia Wij . W przypadku
zastosowania metody Monte Carlo w zespole kanonicznym, warunek równowagi szczegółowej spełnia np. funkcja Metropolisa
Wij = min(1, exp(−β∆H)).
9.2
(9.15)
Model Isinga i dynamika Glaubera
Rozważmy układ spinów Isinga Si = ±1, i = 1, 2, ..., N , gdzie Si oznacza stan i-tego spinu. Jak wspominałam, w takim przypadku wygodnie będzie jako zmienną losową wybrać
stan układu σ. Początkowo układ znajduje się w pewnym określonym stanie (na przykład
wszystkie spiny ”‘w dół”’), ale pod wpływem zadanego procesu, w kolejnych chwilach
czasu t może się znaleźć w innych stanach σ z prawdopodobieństwem P (σ, t). Ewolucja czasowa prawdopodobieństw P (σ, t) zadana jest, zgodnie z poprzednim rozdziałem,
równaniem fundamentalnym, które w postaci dyskretnej ma postać:
P (σ, t + 1) − P (σ, t) =
X
[P (σ 0 , t)w(σ 0 → σ) − P (σ, t)w(σ → σ 0 )] .
σ0
48
(9.16)
Prawa strona równania opisuje bilans ’zysków i strat’, tzn. różnicę pomiędzy przejściami
ze stanów σ 0 do interesującego nas stanu σ i przejściami z σ do innych stanów σ 0 , a
w(σ 0 → σ) i w(σ → σ 0 ) określają częstości tych przejść. Jak już wspomniałam, w fizyce
statystycznej żądamy, żeby P (σ, t) osiągnęło po pewnym czasie rozkład równowagowy:
lim P (σ, t + 1) = P (σ, t) = Peq (σ).
(9.17)
t→∞
Wobec tego z równania fundamentalnego (9.16):
X
[Peq (σ 0 )w(σ 0 → σ) − Peq (σ)w(σ → σ 0 )] = 0.
(9.18)
σ0
Powyższy warunek jest warunkiem stacjonarności. W praktyce, jak już wspomniałam,
zakłada się zwykle dużo silniejszy warunek równowagi szczegółowej:
Peq (σ 0 )w(σ 0 → σ) − Peq (σ)w(σ → σ 0 ) = 0.
(9.19)
Ponieważ rozkład równowagowy w fizyce statystycznej zadany jest rozkładem Gibbsa
(9.2), więc dodatkowo otrzymujemy warunek na prawdopodobieństwa przejścia:
w(σ → σ 0 )
= exp(−β(E(σ 0 ) − E(σ)))
w(σ 0 → σ)
(9.20)
Oczywiście, jak już wspomniałam, powyższy warunek nie określa jednoznacznie prawdopodobieństw przejścia w(σ → σ 0 ), w(σ 0 → σ) i rzeczywiście jest wiele możliwych wyborów, które spełniają równanie (9.20). Jednym z możliwych wyborów jest tzw. dynamika
Glaubera.
W przypadku tej dynamiki zmiana stanu układu polega na obróceniu pojedynczego
spinu i wówczas:
i
Xh
d
P (σ, t) =
w(σ i → σ)P (σ i , t) − w(σ → σ i )P (σ, t) ,
dt
i
(9.21)
gdzie σ i oznacza konfigurację otrzymaną z σ poprzez obrócenie i-tego spinu, a w(σ →
σ i ) jest prawdopodobieństwem przejścia ze stanu σ do σ i , zdefiniowanym w przypadku
dynamiki Glaubera w następujący sposób:
α
1
w(σ → σ ) =
1 − γSi (Si−1 + Si+1 ) ,
2
2
i
(9.22)
gdzie Si−1 , Si , Si+1 oznaczają stany spinów indeksowanych jako i − 1, i, i + 1, α jest stałą
definiującą skalę czasową, a γ = tanh (2J/kB T ). Tak zdefiniowane prawdopodobieństwa
przejścia zapewniają, że spełnione są dwa warunki:
1. warunek równowagi szczegółowej,
2. P (σ, t) osiąga po pewnym czasie rozkład równowagowy Gibbsa.
Jeżeli przyjmiemy, że krok czasowy α = 1 i interesować nas będzie przypadek temperatury
T = 0, który jest przedmiotem niniejszej rozprawy, wówczas:
(0)
Wi (σ)
i
≡ w(σ → σ )T =0
1
1
=
1 − Si (Si−1 + Si+1 ) .
2
2
49
(9.23)
Zauważmy, że:
(0)
Si−1 Si Si+1 Wi (σ)
↑ ↑ ↑
0
↓ ↓ ↓
0
↓ ↑ ↓
1
↑ ↓ ↑
1
↓ ↑ ↑
1/2
↑ ↑ ↓
1/2
↓ ↓ ↑
1/2
↑ ↓ ↓
1/2
(9.24)
co oznacza, że przejścia ↑↓↑→↑↑↑, ↓↑↓→↓↓↓, dla których następuje spadek energii realizowane są w T = 0 z prawdopodobieństwem 1, natomiast przejścia przy których energia
jest zachowana zachodzą z prawdopodobieństwem 1/2.
50
51
Rozdział 10
Skalowanie
Jak wam się wydaje jakie skutki miałoby skonstruowanie słonia nadnaturalnych rozmiarów 1 ? Natura nie tworzy raczej takich dziwactw, ale człowiek bardzo chętnie. Inżynierowie
budują coraz wyższe domy i coraz dłuższe mosty. Większy dom musi mieć jednak mocniejsze fundamenty i grubsze ściany. O ile grubsze? Tu przychodzi nam z pomocą skalowanie.
Zanim przejdziemy do skalowania w naturze i technice zacznijmy jednak od najprostszego
ze skalowań - izometrii, czy inaczej geometrycznego podobieństwa. Weźmy dla przykładu
dwa sześciany różnej wielkości - pierwszy o boku L1 , drugi o boku L2 = kL1 . Powiedzmy,
że interesuje nas stosunek objętości obu sześcianów, oczywiście:
V1 = L31 , V2 = L32 = (kL1 )3 = k 3 L31 = k 3 V1
(10.1)
Stosunek objętości sześcianów nie jest więc taki sam jak stosunek liniowy, ale odpowiada
wartości współczynnika podniesionej do potęgi trzeciej. Przytoczmy tu dobrze znane fakty:
S ∼ L2
V ∼ L3
S ∼ V 2/3 .
(10.2)
Jak by to wyglądało gdybyśmy spróbowali przedstawić którąkolwiek z tych zależności w
skali podwójnie logarytmicznej? Zauważmy, że:
y = axb
log(y) = log(axb )
log(y) = log(a) + blog(x)
y 0 = log(a) + bx0 .
(10.3)
Czyli w skali podwójnie logarytmicznej otrzymamy prostą, której nachylenie da nam wykładnik potęgi.
Żywe stworzenia nie są izometryczne, ale mimo to ich wymiary zmieniają się zgodnie z prawami potęgowymi. Na przykład zależność tempa metabolizmu od masy ciała
u ssaków wyraża się prawem potęgowym o wykładniku 0.74, masa jaja od masy ciała
ptaków prawem potęgowym o wykładniku b = 0.77. Takie skalowanie w biologii nazywamy allometrycznym. Więcej przykładów skalowania w biologii, geologii, literaturze znajdą
1
Dla zainteresowanych polecam książkę Knuta Schmidt Nielsena ’Dlaczego tak ważne są rozmiary
zwierząt? Skalowanie’
52
Państwo w prezentacji PPT zamieszczonej w materiałach do wykładu. Okazuje się, że prawem potęgowym opisane jest większość katastrof: rozkład huraganów, deszczów, trzęsień
Ziemi, epidemii itd. opisane jest prawem potęgowym. Jak fizyk szuka prawa potęgowego?
Jak już wspomniałam wizualizując dane w skali podwójnie logarytmicznej. Jeżeli ukaże
się mu prosta, wtedy oznacza, że ma do czynienia z prawem potęgowym.
Dlaczego o skalowaniu mówimy w przypadku funkcji potęgowej, a przy wykładniczej
już nie? Eksponenta jest również powszechna, ale nie daje skalowania (czy inaczej niezależności od skali). Nie wierzycie? To bardzo łatwo pokazać. Załóżmy, że mamy dwie różne
skale a0 (np. centymetry) i a1 = na0 (np. metry, w tym przypadku a1 = 100a0 ). Pewna
wielkość (np. objętość) dana jest przez funkcję f . Jeżeli f jest potęgowa wówczas:
x b
a0
b
b
b
x
x
x
x
x
f
=
=
= n−b
= n−b f
a1
a1
na0
a0
a0
f
x
a0
=
(10.4)
Mamy więc do czynienia z tą samą funkcją tylko przemnożoną przez czynnik n−b . Co by
było gdyby f było eksponentą? Wówczas:
x
x
= exp
f
a0
a
0
x
x
x
= exp
= exp
f
a1
a1
na0
(10.5)
W tym przypadku czynnik skali nie może być wyłączony i zmienia się zależność funkcyjna,
nie mamy więc do czynienia ze skalowaniem.
10.1
Hipoteza skalowania w teorii przejść fazowych
Pełna teoria ciągłych przejść fazowych powinna pozwolić wyznaczyć temperaturę krytyczną jako funkcję parametrów modelu, oraz określić charakter krytycznych osobliwości
tzn. wyliczyć wartości indeksów krytycznych. Hipoteza skalowania pozwala znaleźć odpowiedź na nieco inne pytania: czy zachowania krytyczne różnych wielkości fizycznych są
niezależne, albo innymi słowy czy wszystkie indeksy krytyczne są niezależne czy może
istnieje jakaś niewielka liczba indeksów, przy pomocy których możemy wyrazić wszystkie
pozostałe.
Rushbrooke (1963), Griffiths (1965), Josephson (1967) i Fisher (1969) pokazali, że
sześć wykładników krytycznych spełnia 4 nierówności, a tym samym nie jest nie
Pierwszą konsekwentną próbą znalezienia odpowiedzi na to pytanie była Hipoteza
Widoma oparta na założeniu o uogólnionej jednorodności funkcji termodynamicznych.
Zgodnie z definicją funkcja n zmiennych f (x1 , x2 , ....xn ) jest jednorodną funkcją stopnia
p jeżeli spełniona jest równość:
f (λx1 , λx2 , . . . , λxn ) = λp f (x1 , x2 , . . . , xn ).
53
(10.6)
Taką funkcją jest na przykład energia wewnętrzna. Jeżeli przez s i v oznaczymy odpowiednio entropię i objętość na jedną cząstkę s = S/N, v = V /N to
E(N s, N v) = N f (s, v),
(10.7)
a więc jest funkcją jednorodną pierwszego stopnia.
Hipoteza Widoma wymaga jednorodności w pewnym ogólniejszym sensie, a mianowicie
f (λa1 x1 , λa2 x2 , . . . , λan xn ) = λp f (x1 , x2 , . . . , xn ).
(10.8)
Funkcja spełniająca ten ostatni warunek nosi nazwę uogólnionej funkcji jednorodnej.
Zgodnie z hipotezą Widoma taką funkcją jest energia swobodna, która w przypadku układu magnetycznego zależy od temperatury i pola magnetycznego F (T, H). Wprowadzając
zmienne zredukowane:
τ = (T − Tc )/Tc , h = H/Tc ,
(10.9)
hipotezę o uogólnionej jednorodności energii swobodnej możemy zapisać w postaci równości:
f (λy τ, λx h) = λp f (τ, h),
(10.10)
która musi być spełniona dla dowolnej wielkości λ. Zróżniczkujmy to równanie obustronnie
względem h:
∂f (τ, h)
τ, λx h)
= λp
.
x
∂λ h
∂h
x ∂f (λ
λ
y
(10.11)
ale zgodnie z definicją:
∂f (τ, h)
= −m
∂h
(10.12)
czyli:
m(λy τ, λx h) = λp−x m(τ, h)
(10.13)
Zachowanie magnetyzacji w okolicy punktu krytycznego opisują dwa indeksy krytyczne:
β, opisujący zachowanie się m dla h = 0 i τ → 0, oraz δ dla τ = 0 i h → 0. Dla h = 0
m(τ, 0) ∼ (−τ )β
(10.14)
m(λy τ ) = λp−x m(τ ) ⇒ (−λy τ )β = λp−x (−τ )β
(10.15)
λyβ τ β = λp−x τ β ⇒ λyβ = λp−x .
(10.16)
a z ostatniego równania
czyli:
Ponieważ ta równość ma być spełniona dla dowolnego λ, więc yβ = p − x i ostatecznie:
β=
p−x
.
y
54
(10.17)
Dla τ = 0, m(0, h) ∼ h1/δ , a z równania skalowania dla magnetyzacji mamy:
m(λx h) = λp−x m(h) ⇒ (λx h)1/δ = λp−x h1/δ .
Stąd podobnie jak poprzednio:
δ=
x
.
p−x
(10.18)
(10.19)
Podobnie, różniczkując obustronnie równanie skalowania dla namagnesowania (10.13)
otrzymujemy równanie skalowania dla podatności izotermicznej:
τ, λx h)
p−x ∂m(τ, h)
=
λ
.
∂λx h
∂h
x ∂m(λ
λ
y
(10.20)
Ponieważ podatność magnetyczna:
χ=
∂m
,
∂h
(10.21)
więc otrzymujemy:
λx χ(λy τ, λx h) = λp−x χ(τ, h).
(10.22)
Wiemy, że w pobliżu punktu krytycznego:
χ ∼ τ −γ ,
(10.23)
czyli:
λx (λy τ )−γ = λp−x τ −γ
λx λ−yγ τ −γ = λp−x τ −γ
x − yγ = p − x → γ =
2x − p
.
y
(10.24)
Dwukrotne zróżniczkowanie równania skalowanie dla energii swobodnej (10.10) względem
temperatury pozwala na wyznaczenie indeksów krytycznych dla ciepła właściwego:
f (λy τ, λx h)
y
x
y ∂f (λ τ, λ h)
λ
∂λy τ
2
∂ f (λy τ, λx h)
λ2y
∂(λy τ )2
λ2y c(λy τ, λx h)
= λp f (τ, h)
∂f (τ, h)
= λp
∂τ
2
∂
f
(τ, h)
= λp
∂τ 2
= λp c(τ, h).
(10.25)
Ponieważ w pobliżu punktu krytycznego:
c ∼ τ −α → λ2y (λy τ )−α = λp τ −α .
(10.26)
Ostatecznie otrzymujemy kolejny, czwarty już związek pomiędzy indeksem krytycznym a
x, y, p:
λ2y−yα = λp → α =
55
2y − p
.
y
(10.27)
Podsumowując, otrzymaliśmy następujące związki:
p−x
y
x
δ =
p−x
2x − p
γ =
y
2y − p
α =
.
y
β =
(10.28)
(10.29)
(10.30)
(10.31)
Można łatwo pokazać, że powyższe związki prowadzą do zależności:
α + 2β + γ = 2,
α + β(δ + 1) = 2,
znanych jako prawa Rushbrooke’a i Griffithsa.
56
(10.32)
(10.33)
57
Rozdział 11
Grupa Renormalizacyjna (GR)
W poprzednim rozdziale zapoznaliśmy się z jedną z metod analizowania problemów fizycznych, w których istnieje konieczność uwzględnienia dużej liczby stopni swobody - metodą
pola średniego. Jak widzieliśmy nie zawsze daje ona poprawne wyniki - np. otrzymujemy
przejście fazowe tam, gdzie go wcale nie ma. Inną, bardziej wyrafinowaną metodą, jest
grupa renormalizacyjna.
W większości problemów w fizyce, a w szczególności wtedy gdy badamy zjawiska krytyczne, mamy do czynienia z olbrzymią liczbą stopni swobody. Typowy układ makroskopowy zawiera co najmniej 1023 cząstek, np. elektronów, a każda współrzędna, każdego
elektronu jest stopniem swobody. W najprostszym nietrywialnym modelu - modelu Isinga,
każda cząstka - ”spin”, ma tylko dwa stopnie swobody ±1, co i tak daje niewyobrażalną
23
liczbę 210 stopni swobody dla całego układu. Zazwyczaj ogromna liczba stopni swobody
może być w istotny sposób ograniczona bez straty istoty rzeczy badanego zjawiska i rozważenie bardzo małej mikroskopowej części makroskopowego układu pozwala na poprawne
odtworzenie jego własności. Biorąc pod uwagę ekstensywny charakter energii można się
spodziewać, że znając np. energię układu zbudowanego z kilku tysięcy spinów znamy
energię dowolnie dużego układu. Powstaje jednak pytanie czy jest jakieś graniczna wartość rozmiaru układu, poniżej której jego redukcja może prowadzić do istotnych błędów.
Takim granicznym, minimalnym rozmiarem, który powinno się uwzględnić przy analizie
zjawiska jest rozmiar rzędu promienia korelacji ξ. Promień korelacji zależy oczywiście od
stanu układu i w korzystnych, z punktu widzenia teoretycznego opisu, warunkach jest on
rzędu jednej lub kilku stałych sieci. Kiedy promień korelacji jest taki mały istnieje wiele
metod, opartych na prostej redukcji liczby stopni swobody, pozwalających badać interesujący nas układ. Najprostsze i jednocześnie najbardziej popularne to metody oparte
na idei pola średniego, a więc np. teoria pola molekularnego Weissa czy metoda HartreeFocka. Wszystkie tego typu metody oparte są na wspólnym założeniu, że własności całego
układu są jednoznacznie określone przez własności małego klastra.
W szczególnych przypadkach promień korelacji jest wielokrotnie większy od stałej
sieci, tzn., że w zakresie rzędu promienia korelacji mamy bardzo dużo stopni swobody.
Przy czym bardzo dużo oznacza tysiące czy miliony, a w granicznym przypadku nieskończenie dużo stopni swobody. Metoda grupy renormalizacyjnej (RG) dostarcza narzędzia
umożliwiającego badanie układów z bardzo dużą liczbą stopni swobody w zakresie rzędu
promienia korelacji, poprzez redukcję opartą jednakże nie na prostym ograniczeniu rozmiarów próbki rozważanego układu. Redukcja stopni swobody wykonywana jest w wielu
krokach i może być realizowana na kilka sposobów. W istocie sposoby te można podzielić
58
na dwie klasy. Do pierwszej należą te oparte bezpośrednio na konstrukcji Kadanoffa, w
których redukcja odbywa się w przestrzeni rzeczywistej i noszą one nazwę renormalizacji
w przestrzeni rzeczywistej (Real Space RG), a do drugiej metody oparte na podejściu
teorio-polowym, gdzie redukcja odbywa się w przestrzeni odwrotnej (Momentum Space
RG). Wprawdzie to drugie podejście zostało zaproponowane wcześniej, ale zaczniemy od
pierwszego, które zarówno pojęciowo jak i rachunkowo jest prostsze. Jak pokażemy dalej
RSRG jest przydatna raczej do opisu układów niskowymiarowych, podczas gdy MSRG
do układów trój- lub więcej wymiarowych.
11.1
Renormalizacja w przestrzeni rzeczywistej.
Rozważmy układ spinów isingowskich S0 = ±1 rozmieszczonych na sieci o stałej sieci a0 .
Podzielmy nasz układ na komórki o rozmiarach liniowych La0 . Przyporządkujmy każdej
takiej komórce efektywną zmienną spinową S1 = ±1. Te nowe zmienne spinowe tworzą
sieć o stałej sieci a1 = La0 . Powtarzając tę procedurę otrzymujemy sieć o stałej sieci
a2 = La1 = L2 a0 , następnie a3 = L3 a0 , itd. Oczywiście w każdym kroku redukcji istnieje
konieczność skonstruowania (wyznaczenia) efektywnego oddziaływania pomiędzy efektywnymi stopniami swobody. Tego typu procedura może być prowadzona aż do momentu gdy
w zakresie rzędu promienia korelacji znajduje się już tylko kilka stopni swobody. Innymi
słowy w każdym kroku redukcji promień korelacji mierzony w efektywnych stałych sieci
zmniejsza się dwukrotnie, czyli:
ξ1 =
1
1
1
1
ξ0 , ξ2 = ξ1 = 2 ξ0 , . . . , ξn = ξn−1
L
L
L
L
(11.1)
Jeżeli układ możemy opisać przy pomocy hamiltonianu, jak ma to miejsce na przykład w przypadku modelu Isinga, to procedurę redukcji stopni swobody możemy uznać za
transformację Hamiltonianu w przestrzeni jego parametrów. Jeżeli oznaczymy tę transformację przez R to przejście od układu oryginalnych spinów na sieci o stałej a0 , opisanego
Hamiltonianem H0 do układu efektywnych spinów na sieci o stałej a1 , opisanego Hamiltonianem H1 można symbolicznie zapisać jako:
R(H0 ) = H1 , R(H1 ) = H2 , . . . , R(Hn−1 ) = Hn .
(11.2)
Rozważmy układ spinów Isinga Sr z oddziaływaniem pomiędzy najbliższymi sąsiadami J. Hamiltonian jest w tym przypadku funkcjonałem zależnym od układu zmiennych
dynamicznych Sr i parametru oddziaływania J. Wprowadzając oznaczenie K = J/T , oraz
zakładając, że w każdym kroku transformacji będziemy mieli do czynienia ze zmiennymi
dynamicznymi o tym samym charakterze, możemy przyjąć, że Hamiltonian jest jednoznacznie zdefiniowany poprzez wielkość K.
Przy takim założeniu transformacja Hamiltonianu oznacza zmianę K:
R(H0 ) = H1 → K1 = f (K0 )
R(H1 ) = H2 → K2 = f (K1 )
...
R(Hn−1 ) = Hn → Kn = f (Kn−1 )
59
(11.3)
Jeżeli mamy transformację R, która jest powtarzana wielokrotnie to najprostszą rzeczą,
która może się zdarzyć jest to, że ciąg Hamiltonianów osiąga punkt stały transformacji,
który oznaczymy przez H ∗ (i odpowiednio K ∗ ):
R(H ∗ ) = H ∗ → K ∗ = f (K ∗ )
(11.4)
Okazuje się, że punkt stały ma związek z punktem krytycznym. Jaki? Jak już wspomniałam przy transformacji renormalizacji o czynnik L promień korelacji zmienia się
zgodnie z relacją:
ξn =
1
ξn−1 .
L
(11.5)
Oczywiście zmiana promienia korelacji zależy od zmiany K. Jeżeli oznaczymy ξn ≡ ξ(Kn ),
wówczas możemy powyższą relację skalowania zapisać jako:
ξ(Kn ) =
1
ξ(Kn−1 ) → ξ(Kn−1 ) = Lξ(Kn ).
L
(11.6)
W punkcie stalym transformacji mamy Kn−1 = Kn = K ∗ , czyli:
ξ(K ∗ ) = Lξ(K ∗ ).
(11.7)
Ponieważ L > 1, to powyższe równanie ma tylko dwa rozwiązania ξ = 0, które odpowiada
układowi, w którym nie ma żadnych korelacji fluktuacji, oraz ξ = ∞, co zgodnie z definicją
oznacza punkt krytyczny.
W najprotszym przypadku możemy mieć dwa punkty stałe przyciągające, opowiadające zachowaniu się układu w temperaturze T = 0 i T = ∞. Oba te punkty odpowiadają
promieniowi korelacji ξ = 0. Każdy z tych punktów ma swój obszar przyciągania. Obszary
przyciągania tych punktów rozdzielone są punktem stałym odpychającym odpowiadającym temperaturze krytycznej (w tym przypadku ξ = ∞).
11.2
Zastosowanie idei GR do polityki
Pod koniec lat 90-tych francuski fizyk Serge Galam zaproponował model oparty na idei
GR do opisu procesów politycznych. Załóżmy, że mamy grupę ludzi – część z nich oznaczymy literką A - zwolennicy jednej partii, a drugą część przez B - zwolennicy partii
opozycyjnej do A. Powiedzmy, że społeczeństwo składa się w części p1 z osób typu A, a
w części 1 − p1 z osób typu B. Losujemy grupy po 3 osoby i wybieramy ich reprezentanta (może to odpowiadać wyborom na najniższym poziomie). Jeżeli w grupie znajdą się
3 osoby A to reprezentant będzie również A, jeżeli będą 2A i B to reprezentant będzie
też A, w pozostałych przypadkach reprezentantem grupy będzie B. Taka procedura jest
zgodna z ideą wyborów demokratycznych. Następnie głosowanie odbywa się na wyższym
szczeblu. W drugim kroku iteracji z grupy reprezentantów losujemy grupy po 3 osoby i
wybieramy ich reprezentanta itd. Odpowiada to dokładnie procedurze GR. Interesuje nas
kto wygra. Jeżeli na najniższym szczeblu mamy p1 osób A to ile będzie ich na szczeblu
2, 3 itd. Ostatni, najwyższy szczebel mógłby odpowiadać prezydenturze. Obliczmy jakie
jest prawdopodobieństwo p2 osób typu A na szczeblu drugim:
p2 = p31 + 3p21 (1 − p1 ).
60
(11.8)
Ogólnie:
pn+1 = p3n + 3p2n (1 − pn ).
(11.9)
Takie odwzorowanie ma 3 punkty stałe:
1
p = p3 + 3p2 (1 − p) → p = 0, 1, .
2
(11.10)
Dwa pierwsze są przyciągające, a trzeci jest odpychający. Oznacza to, że jeżeli na najniższym poziomie p1 < 1/2 to wówczas ostatecznie osiągniemy punkt p = 0, który odpowiada
brakowi osób typu A. Natomiast dla p1 > 1/2 ostatecznie osiągniemy punkt p = 1, który odpowiada brakowi osób typu B. Oczywiście sprawa się komplikuje, jeżeli wybieramy
grupy nie trzech, ale na przykład 4 osób. Co zrobić jeżeli w danej grupie znajdą się dwie
osoby typu A i dwie typu B? Galam założył, że w takim przypadku wybrana zostanie
osoba z partii, która jest u władzy. Jeżeli więc u władzy jest B, to wówczas:
p2 = p41 + 4p31 (1 − p1 ).
(11.11)
Można wyliczyć, że w takim przypadku mamy następujące
√ punkty stałe: jak zwykle dwa
trywialne przyciągające p = 0, 1 i trzeci krytyczny p = 1+6 13 ≈ 0.77. Oznacza to, że musi
być więcej niż 77% zwolennikow A na najniższym poziomie (w społoczeństwie), żeby A
mógł być wybrany na prezydenta.
11.3
Transformacja GR i Model Isinga
W najogólniejszym przypadku transformację GR można zapisać w postaci:
exp[H 0 (σ)] = T rP (σ, S) exp[H(S)],
(11.12)
gdzie P (σ, S) jest operatorem rzutowania przestrzeni oryginalnych spinów S na przestrzeń
jakiś efektywnych spinów σ. Można też traktować P (σ, S) jako pewną operację prowadzącą
do redukcji stopni swobody poprzez transformację oddziaływań pomiędzy oryginalnymi
zmiennymi a efektywnymi. Wybór tej operacji (operatora) jest pierwszym krokiem w
technice GR. Mówiąc, że nie można napisać książki kucharskiej na temat GR, twórcy tej
metody mieli na myśli przede wszystkim to, że nie ma jednoznacznej metody wyboru
operatora P . Istnieją jednak pewne naturalne kryteria wyboru takie jak:
1. P musi być tak wybrane, aby nie zmieniała się suma stanów badanego układu.
2. Transformacja GR musi zachowywać wszystki symetrie badanego układu.
Oczywiście te kryteria i tak pozostawiają ogromną dowolność wyboru.
11.3.1
Decymacja w jednowymiarowym modelu Isinga
Najprostszą transformacją GR jest tak zwana decymacja, z którą mieliśmy już do czynienia w modelu perkolacji bond. W przypadku modelu Isinga metode tą można jednak
efektywnie stosować tylko w przypadku jednowymiarowym. Decymacja polega na kolejnym wykonywaniu częściowej sumy stanów względem tylko niektórych stopni swobody,
61
a więc eliminowaniu np. co drugiego spinu. Rozważmy zamknięty łańcuch spinów Isinga
opisany bezwymiarowym hamiltonianem:
H=
f
−β H
=K
N
X
Si Si+1 ,
(11.13)
i=1
gdzie K = βJ. Transformacja, a więc działanie operatora P polegać będzie na podzieleniu
wszystkich spinów na dwie grupy, co drugi nazwiemy S, a pozostałe σ i wykonaniu sumy
jedynie względem stopni swobody spinów S:
exp[H 0 (σ)] = T rS exp[H(σ, S)] = T rS exp K[σ1 S2 + S2 σ3 + . . . + Sn σn+1 ] (11.14)
= T rS exp[Kσ1 S2 ] exp[KS2 σ3 ] . . . exp[KSn σn+1 ]
(11.15)
= T rS2 exp[KS2 (σ1 + σ3 )] + . . . + T rSn exp[KSn (σn−1 + σn+1 )](11.16)
Wykonanie śladu oznacza podstawienie za Si ich możliwych wartości, a więc w tym przypadku ±1. Zakładając dodatkowo cykliczne warunki brzegowe σn+1 = σ1 otrzymujemy:
exp[H 0 (σ)] = exp[K(σ1 + σ3 )] + exp[−K(σ1 + σ3 )] + . . .
= 2 cosh[K(σ1 + σ3 )] + . . . + 2 cosh[K(σn−1 + σn+1 )]
(11.17)
(11.18)
Czyli efektywny hamiltonian:
H 0 (σ) = ln {2 cosh[K(σ1 + σ3 )] + . . . + 2 cosh[K(σn−1 + σn+1 )]}
(11.19)
Ale z drugiej strony efektywny hamiltonian powinien mieć postać wyjściowego, czyli dla
pary spinów i, j:
H 0 (σ) = G + K 0 σi σj .
(11.20)
Otrzymujemy więc następującą równość:
G + K 0 σi σj = ln {2 cosh[K(σi + σj )]} ,
(11.21)
która w istocie jest układem dwóch równań:
σi = σj → ln {2 cosh[2K]}
σi = −σj → ln 2 = G − K 0 .
Rozwiązując te równania znajdziemy łatwo:
1
K 0 = ln {cosh[2K]}
2
1
1
G = K 0 + ln 2.
2
2
(11.22)
(11.23)
(11.24)
(11.25)
Pierwsze wyrażenie jest równaniem rekurencyjnym na stałą oddziaływania. Żeby znaleźć
ewentualny punkt krytyczny musimy jak zwykle znaleźć punkty stałe transformacji, tzn:
1
K ∗ = ln {cosh[2K∗]} →, K ∗ = 0, K ∗ = ∞.
(11.26)
2
Nasza transformacja ma więc tylko dwa trywialne punkty stałe - jeden w temperaturze
T = 0K ∗ = ∞, a drugi dla nieskończenie wysokich temperatur K ∗ = 0. Można zuważyć,
że K > K1 > K2 > K3 > . . . > Kn , czyli K ∗ = 0 jest stabilnym (przyciągającym punktem
stałym), a K ∗ = ∞(T = 0) niestabilnym. Oznacza to, że układ w trakcie transformacji
będzie się przesuwał do fazy nieuporządkowanej. Zgodnie z oczekiwaniami trzymaliśmy
więc wynik, że w jednowymiarowym modelu Isinga nie ma punktu kryrtycznego.
62
11.3.2
Transformacja blokowa w dwuwymiarowym modelu Isinga
W poprzednich rozdziałach wykorzystywaliśmy transformację typu decymacji, gdzie część
węzłow była usuwana. Ogólniejszą metodą jest metoda blokowa, w której sieć dzielona
jest na bloki składające się z kilku spinów i każdemu takiemu blokowi przypisywany jest
efektywny spin. Na tej metodzie oparty był również poznany już model wyborów politycznych Galama. Pierwszym krokiem w przypadku metody blokowej jest renormalizacja sieci,
przy czym sieć efektywna powinna być izomorficzna z oryginalną siecią. Drugim krokiem
procedury jest wybór projektora. Jeżeli przez ZS i Zσ oznaczymy odpowiednio sumę stanów dla problemu wyjściowego (węzłów) i efektywnego (komórek) to żeby transformacja
GR nie zmieniała fizyki musi zachodzić:
ZS = Zσ
(11.27)
ZS = T rS exp[H(S)]
Zσ = T rσ exp[H 0 (σ)]
(11.28)
(11.29)
exp[H 0 (σ)] = T rS P (σ, S) exp[H(S)],
(11.30)
Zσ = T rσ exp[H 0 (σ)]
= T rσ T rS P (σ, S) exp[H(S)]
= T rS exp[H(S)]T rσ P (σ, S).
(11.31)
(11.32)
(11.33)
gdzie:
Ponieważ:
więc:
Czyli aby ZS = Zσ musi zachodzić:
T rσ P (σ, S) = 1.
(11.34)
Jeżeli potrafilibyśmy rozwiązać ściśle równanie:
exp[H 0 (σ)] = T rS P (σ, S) exp[H(S)],
(11.35)
dla każdego projektora spełniającego warunek
T rσ P (σ, S) = 1.
(11.36)
oraz zachowującego wszystkie symetrie problemu to otrzymalibyśmy poprawne wyniki.
Niestety nie jest to zwykle możliwe. Jak już wcześniej wspominaliśmy nie ma przepisu
na transformację GR, jednak w przypadku modelu Isinga na sieci trójkątnej wybór zaproponowany przez Niemejera i Van Leuvena w 1974 wydaje się bardzo naturalny. Jest
on oparty na tak zwanej majority rule (regule większości). Metode tą poznaliśmy przy
okazji socjofizycznego modelu Galama. Metoda ta mówi, że kierunek wypadkowego spinu
jest taki jak kierunek większości spinów w komórce. W ekonofizyce popularna jest również
inna reguła, tzw. minority (mniejszość), która jest oczywiście przeciwieństwem majority.
Taka reguła używana jest do budow tak zwanych minority games, w których sukces
63
zapewnia zachowanie przeciwne do większości (typu - wszyscy kupują, więc ja powinienem sprzedać). Wracając do majority rule dla modelu Isinga na sieci trójkątnej zapiszmy
projektor w postaci:
Y
1
(11.37)
P (σ, S) =
pα , pα = (1 + σα Mα ),
2
gdzie M = ±1 jest spinem wypadkowym komórki. Jeżeli σM = 1 to pα = 1 i taki stan
daje wkład do efektywnej sumy stanów, natomiast dla σM = −1 mamy pα = 0. Spin
wypadkowy ma natomiast postać:
1
Mα = (S1 + S2 + S3 − S1 S2 S3 ).
2
(11.38)
Można łatwo sprawdzić, że M ma żądane własności, tzn. równa sie +1 jeżeli przynajmiej dwa spiny są równe +1 i −1 gdy przynajmiej dwa spiny są równe −1. Znalezienie
sumy stanów i energii dla pojedyńczej komórki jest wprawdzie łatwe, ale już wyznaczenie ścisłych równań rekurencyjnych jest niemożliwe. Stosuje się wobec tego różne metody
przybliżone, najczęściej rozwinięcie kumulantowe lub przybliżenie klastrowe. Metody te
nie będą jednak przedmiotem tego wykładu.
64