CZUJNIKI I PRZETWORNIKI - LABORATORIUM
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
Grupa
E2ISE1
Podgrupa
Numer ćwiczenia
Lp.
Nazwisko i imię
Ocena
Data wykonania
1.
Piróg Ilona
ćwiczenia
2.
Rępalska Marta
Podpis prowadzącego
3.
Rusin Maciej
zajęcia
4.
Data oddania
5.
sprawozdania
POMIARY PARAMETRÓW POLA MAGNETYCZNEGO
Temat
3
12.12.2012
1. Spis przyrządów
Lp.
Nazwa przyrządu
Typ przyrządu
Producent
Numer fabr.
1.
Teslomierz cyfrowy
5180
E.W.Bell
0852153
2.
Czujnik Halla
STH17-0404
E.W.Bell
05610073
3.
Zasilacz stabilizowany
DF1730SB5A
NdN
4.
Sonda prądowa
i30s
Fluke
9037
5.
Miernik laboratoryjny
APPA207
APPA
8857
6.
Oscyloskop cyfrowy
DSO-X-2002A
Agilent
2. Stanowisko pomiarowe 1 (rys. 1)
a = 00
a = 900
A
a
V
Czujnik
Halla
teslomierz
2.1
Czujnik
Halla
teslomierz
Pomiar parametrów pola magnetycznego w funkcji kąta położenia czujnika
względem źródła pola (pomiar składowych)
Napięcie zasilające cewkę U = 14 V = const.
Lp.
a [º]
B [mT]
H [kA/m]
μ [H/m]
1
2
3
4
5
6
7
8
9
10
11
0
15
30
45
60
90
180
270
300
315
330
-0,08
-0,08
-0,05
0,06
0,78
1,29
-0,24
-1,68
-1,11
-0,28
-0,16
-0,07
-0,045
-0,03
0,05
0,61
1,01
-0,19
-1,32
-0,89
-0,22
-0,14
11,43·10-7
*17,78·10-7
*16,67·10-7
12,00·10-7
12,79·10-7
12,77·10-7
12,63·10-7
12,73·10-7
12,47·10-7
12,73·10-7
11,43·10-7
* wyniki nie uwzględnione przy wyznaczaniu μśr
Strona 1 z 7
μśr = 12,33·10-7
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
a – kąt obrotu cewki (położenie wyjściowe 00 jak na rys. 1)
B – indukcja magnetyczna mierzona teslomierzem połączonym z czujnikiem Halla
H – natężenie pola magnetycznego mierzone teslomierzem połączonym z czujnikiem Halla
– przenikalność magnetyczna wyznaczona z zależności = B/H
Przykładowe obliczenia:
B 1,29 10 3
12,77 10 7 [H/m].
H
1,01 10 3
V s
T
2
V
s
H
μ m
A
A m m
A
m
m
Charakterystyka natężenia pola magnetycznego H w funkcji położenia a cewki
względem czujnika Halla
(U = 14 V = const., gdzie U – napięcie zasilające cewkę – odczytane z zasilacza stabilizowanego)
H = f( a )
1,50
H [kA/m]
1,00
0,50
0,00
0
90
180
270
360
-0,50
-1,00
-1,50
O
a[ ]
Charakterystyka indukcji magnetycznej B w funkcji położenia a cewki względem czujnika
Halla (U = 14 V = const.)
B = f( a )
1,50
1,00
B [mT]
0,50
0,00
-0,50
0
90
180
-1,00
-1,50
-2,00
O
a[ ]
Strona 2 z 7
270
360
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
Charakterystyka indukcji magnetycznej B w funkcji natężenia pola magnetycznego H
B = f(H)
0,0015
0,0010
H [A/m]
0,0005
0,0000
-1500
-1000
-500
0
500
1000
1500
-0,0005
-0,0010
y = 12,70·10-7x + 5,9·10-6
R2 = 9,999E-01
-0,0015
-0,0020
B [T]
2.2
Pomiar indukcji magnetycznej w funkcji napięcia zasilającego cewkę
Pomiary wykonano przy położeniu cewki a = 900 (rys. 1)
Lp.
U [V]
B [mT]
H [kA/m]
μ [H/m]
1
2
3
4
5
6
7
8
9
10
11
14,5
14
12
10
8
6
4
3
2
1
0
3,55
3,47
2,94
2,43
1,92
1,37
0,87
0,65
0,38
0,12
-0,13
2,80
2,77
2,34
1,93
1,52
1,09
0,71
0,52
0,31
0,10
-0,09
12,68·10-7
12,53·10-7
12,56·10-7
12,59·10-7
12,63·10-7
12,57·10-7
12,25·10-7
12,50·10-7
12,26·10-7
12,00·10-7
*14,44·10-7
μśr = 12,46·10-7
* wyniki nie uwzględnione przy wyznaczaniu μśr
Charakterystyka natężenia pola magnetycznego H w funkcji napięcia U zasilającego
cewkę (a = 900 = const.)
H = f(U)
3,00
2,50
H [kA/m]
2,00
1,50
1,00
0,50
0,00
0
1
2
3
4
5
6
7
8
-0,50
U [V]
Strona 3 z 7
9
10
11
12
13
14
15
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
Charakterystyka indukcji magnetycznej B w funkcji napięcia U zasilającego cewkę
(a = 900 = const.)
B = f(U)
4,00
3,50
3,00
B [mT]
2,50
2,00
1,50
1,00
0,50
0,00
-0,50
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
U [V]
3. Stanowisko pomiarowe 2 (rys. 2)
A
a = 900
autotransformator
Czujnik
Halla
Sonda
prądowa
oscyloskop
teslomierz
kanał 2
kanał 1
a) a = 900 = const.
I [A]
Uo1 [mV]
B [mT]
U o1 [mV]
0,4940
49,86
2,72
238,15
0,2799
28,31
1,37
133,55
I – wskazanie amperomierza
B – wskazanie teslomierza
Uo1 – wskazanie oscyloskopu kanał 1
Uo2 – wskazanie oscyloskopu kanał 2
Strona 4 z 7
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
I = 0,5 A
I = 0,28A
b) I = 0,2799 A = const.
Uo1 [mV]
a [0]
B [mT]
Uo2 [mV]
28,331
90
1,37
133,35
28,237
70
0,43
42,09
I – wskazanie amperomierza
B – wskazanie teslomierza
Uo1 – wskazanie oscyloskopu kanał 1
Uo2 – wskazanie oscyloskopu kanał 2
Strona 5 z 7
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
a = 900
a = 700
4. Wnioski:
a.
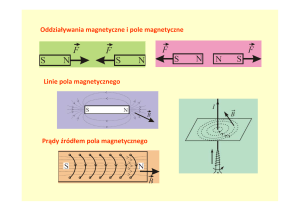
W pierwszej części ćwiczenia dokonywany był pomiar pola magnetycznego
pochodzącego od cewki zasilanej prądem stałym, stanowiącej źródło pola. Ze względu na
niezmienne parametry zasilania pole to było stałe, lecz zmieniało się jego położenie
względem czujnika Halla przez obrót cewki. Czujnik umożliwia pomiar indukcji, gdy jej wektor
skierowany jest prostopadle do kierunku jego prądu polaryzującego. Z związku z tym
mierzona jest składowa wektora indukcji prostopadła do czujnika. Największe wartości
składowej B zostały uzyskane przy położeniu cewki względem czujnika Halla równym 900
oraz 2700. Czujnik znajduje się wówczas w obszarze zamykających się linii sił pola
magnetycznego, którego źródłem jest cewka, a styczny do nich wektor indukcji przecina
prostopadle płaszczyznę czujnika. Znak „–” dla położenia 2700 wynika z przeciwnego zwrotu
wektora indukcji B względem czujnika, w stosunku do położenia 900. W pozostałych
położeniach cewki, wartość indukcji były mniejsze, gdyż wraz z obrotem malej wartość
mierzonej składowej wektora indukcji B, prostopadłej to czujnika.
Wskazania natężenia pola magnetycznego H są analogiczne jak indukcji B, gdyż wektory
te mają zgodne kierunki a wielkości te wiąże liniowa zależność. Wyznaczona stała wiążąca B
i H różni się od wartości doświadczalnej (μ =μoμr) mniej niż 2 %. Pomiar B i H dokonywany
Strona 6 z 7
CZUJNIKI I PRZETWORNIKI - LABORATORIUM
był tym samym przyrządem, zetem wyznaczana wartość przenikalności jest parametrem
wprowadzanym jako przelicznik przez stosowany teslomierz. Źródłem błędu pomiaru
parametru pola jest czujnik, dla którego deklarowana przez producenta dokładność wynosi
± 2%, a także sam teslomierz posiada błąd na poziomie 1 %.
Uzyskane liniowe zależności B = f(U) oraz H = f(U) świadczą, iż indukcja pola
magnetycznego jest proporcjonalna do napięcia zasilającego cewkę.
b.
Zgodnie z rysunkiem 2 sygnał kanału 1 oscyloskopu obrazuje prąd przepływający przez
cewkę, a z kanału 2 odpowiada indukcji mierzonej przez teslomierz.
Przy zmianie wartości prądu w obwodzie i stałym położeniu cewki względem czujnika na
oscyloskopie obserwujemy zmianę sygnału w kanale 2 (mierzonej indukcji), odpowiadającej
zmianom sygnału w kanale 1 (prądu I w obwodzie). Przy mniejszej wartości prądu
zasilającego spada wartość indukcji magnetycznej. (Amplitudy obu sygnałów zmieniają się w
ten sam sposób).
Przy odchylaniu cewki z położenia 90° do położenia 70° względem czujnika, przy stałej
wartości prądu w obwodzie, obserwujemy spadek amplitudy sygnału w kanale 2,
a teslomierz wskazuje mniejszą wartość indukcji. Analogicznie, jak w pierwszej części
ćwiczenia, po odchyleniu cewki od położenia 90° maleje wartość mierzonej składowej
indukcji prostopadłej do czujnika.
Przy zasilaniu układu prądem przemiennym widać, iż sygnał indukcji magnetycznej jest tej
samej częstotliwość co prąd płynący w cewce, stanowiącej źródło tego pola magnetycznego.
Strona 7 z 7