Politechnika Poznańska
Wydział Elektroniki i Telekomunikacji
Katedra Telekomunikacji
Multimedialnej i Mikroelektroniki
Agnieszka Ligocka
Wpływ indukcyjności na propagację
sygnału w połączeniach układów VLSI
Rozprawa doktorska
Promotor: dr hab. inż. Wojciech Bandurski, prof. PP
Poznań, 2008
Podziękowania
Dla Pana Profesora Wojciecha Bandurskiego za pomoc,
zaangażowanie i cierpliwość
Dla moich Rodziców za wspaniałe dzieciństwo i pewność, że zawsze
mogę na Nich liczyć
Dla Krzysztofa za mobilizację, cierpliwość i wparcie
4
Streszczenie
Rozprawa doktorska poświęcona jest zagadnieniom modelowania i symulacji połączeń w
układach VLSI. W szczególności prezentuje metodę obliczania odpowiedzi skokowej oraz
odpowiedzi na zbocze narastające oraz czas przejścia przez próg dla połączeń o znacznej
indukcyjności. Metoda oparta jest na analitycznym wyprowadzeniu odpowiedzi skokowej z
równań linii transmisyjnej RLC za pomocą metody wielu skal, wykorzystując uproszczenia
związane z takimi cechami połączenia jak mała rezystancja i duża indukcyjność. Dla
wyprowadzonych zależności przeprowadzono analizę wrażliwości, zwracając szczególną
uwagę na wpływ indukcyjności na wyprowadzone parametry
Abstract
The dissertation is dealing with modeling and simulation of interconnects in VLSI systems. It
presents the method of calculating the step and ramp responses and the threshold crossing
times for high-inductive interconnects. The method is based on analytical calculation of step
response. The step response is derived from RLC transmission line equation using multiple
scales method and assumptions of low losses and high inductance. There is presented the
sensitivity analysis of derived parameters, with particular attention to inductance influence.
5
6
Wprowadzenie
Spis treści
1. WPROWADZENIE .............................................................................................. 9
1.1.
Układy scalone o znacznej skali integracji ............................................. 9
1.2.
Cel i teza pracy.................................................................................... 13
1.3.
Przegląd pracy .................................................................................... 15
2. POŁĄCZENIA O DUŻEJ WARTOŚCI INDUKCYJNOŚCI ............................17
2.1.
Charakterystyka połączeń w układach scalonych ................................ 17
2.2.
Modelowanie ..................................................................................... 20
2.3.
Symulacja ........................................................................................... 24
2.3.1.
Linia transmisyjna RLC ........................................................................................................................ 27
2.3.2.
Równania linii transmisyjnej............................................................................................................... 27
2.3.3.
Obliczanie odpowiedzi połączenia ..................................................................................................... 35
2.3.4.
Obliczenia czasów opóźnień ............................................................................................................... 37
3. PROPAGACJA SYGNAŁU W POŁĄCZENIACH UKŁADÓW VLSI............45
3.1.
Obliczanie odpowiedzi pojedynczego połączenia ................................ 45
3.1.1.
Odpowiedź skokowa .......................................................................................................................... 55
3.1.2.
Odpowiedź na zbocze narastające. .................................................................................................... 68
3.2.
Analiza odpowiedzi dla połączeń sprzężonych .................................... 71
7
Wprowadzenie
4. OBLICZANIE CZASÓW PRZEJŚCIA PRZEZ PRÓG .................................... 81
4.1.
Czas przejścia przez próg dla odpowiedzi skokowej ............................. 81
4.1.1.
Zgrubne obliczenie czasu przejścia przez próg dla odpowiedzi skokowej .......................................... 82
4.1.2.
Obliczanie czasu przejścia przez próg odpowiedzi skokowej metodą iteracyjną ............................... 89
4.2.
Czas przejścia przez próg dla odpowiedzi na zbocze narastające.......... 92
4.2.1.
Zgrubne obliczenie czasu przejścia przez próg dla odpowiedzi na zbocze narastające . .................... 94
4.2.2.
Obliczanie czasu przejścia przez próg na zbocze narastające metodą iteracyjną. ............................. 98
5. ANALIZA WRAŻLIWOŚCI, WPŁYW INDUKCYJNOŚCI POŁĄCZEŃ .. 101
5.1.
Wrażliwość odpowiedzi skokowej ..................................................... 102
5.1.1.
Wrażliwość na parametry określające straty i parametry we/wy .................................................... 102
5.1.2.
Wrażliwość na parametry R i C ......................................................................................................... 113
5.1.3.
Wrażliwość na indukcyjność połączeń .............................................................................................. 118
5.1.4.
Wrażliwość na parametry geometryczne połączeń .......................................................................... 124
5.2.
Wrażliwość odpowiedzi na zbocze narastające .................................. 129
5.2.1.
Wrażliwość na parametry określające straty i parametry we/wy .................................................... 129
5.2.2.
Wrażliwość na parametry R i C ......................................................................................................... 145
5.2.3.
Wrażliwość na indukcyjność połączeń .............................................................................................. 148
5.2.4.
Wrażliwość na parametry geometryczne połączeń .......................................................................... 152
5.3.
Wrażliwość czasu przejścia przez próg w odpowiedzi na zbocze
narastające ................................................................................................. 154
5.3.1.
Wrażliwość na parametry modelu połączenia.................................................................................. 155
5.3.2.
Wrażliwość na parametry geometryczne połączeń .......................................................................... 173
6. PODSUMOWANIE. ........................................................................................ 177
7. LITERATURA ................................................................................................. 181
8
Wprowadzenie
1. Wprowadzenie
1.1. Układy scalone o znacznej skali integracji
Intensywny rozwój układów scalonych umożliwił informatyzację społeczeństwa. W celu
sprostania coraz większym wymaganiom aplikacji co do szybkości działania, zmniejszania
rozmiarów oraz zużycia energii, konieczny jest stały rozwój i miniaturyzacja układów
scalonych. W roku 1965 Gordon Moore na podstawie obserwacji tempa rozwoju układów
scalonych, sformułował zasadę, zwaną prawem Moora, mówiącą w oryginalnym
sformułowaniu, że ekonomicznie optymalna liczba tranzystorów w układzie scalonym
podwaja się co 18-24 miesiące [68]. Prawo to obowiązuje do dziś, a firmy zajmujące się
produkcją
mikroprocesorów
prześcigają
się
w
rozwiązaniach
technologicznych
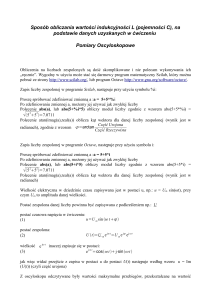
umożliwiających taki wzrost upakowania tranzystorów (Rys. 1.1). Podstawą, która umożliwia
ten wzrost jest stosowanie coraz mniejszych elementów w procesie wytwarzania tranzystora.
Zmniejszanie
rozmiarów
elementów
czynnych
w
układach
scalonych
wymaga
równoczesnego skalowania długości połączeń pomiędzy nimi. Wraz ze wzrostem scalenia,
pojawiły się też nowe zjawiska pasożytnicze związane z połączeniami. Zjawiska te,
generowane są przez zmniejszenie rozmiarów poprzecznych połączeń (zwiększenie strat),
odległości pomiędzy połączeniami (sprzężenia magnetyczne i pojemnościowe pomiędzy
9
Wprowadzenie
ścieżkami, powodujące przeniki) oraz poprzez zwiększenie liczby elementów czynnych,
powodujące konieczność zwiększenia liczby połączeń. W wielu typach układów scalonych,
takich jak układy mikrofalowe monolityczne MMIC (ang. Monolitythic Microwave Integrated
Circuits), czy tranzystory ze złączem metal-przewodnik GaAs MESFET (ang. MEtalSemiconductor Field Effect Transistor), technologia oparta na układach bipolarnych i arsenku
galu CaAs, w zastosowaniu do wielkich częstotliwości, daje bardzo dobre rezultaty. Jednak w
układach o wielkiej i ultrawielkiej skali integracji VLSI (ang. Very Large Scale of
Integration) lub ULSI (ang. Ultra Large Scale of Integration), ze względu na problemy
technologiczne i relatywnie duże straty mocy, technologia materiałów wymaga ciągłych
unowocześnień [48]. Obecnie wytwarza się układy scalone głównie w technologiach 90 i
65nm, na początku roku 2007 Intel wprowadził technologię 45nm, jest też zapowiedź Intela, o
wprowadzeniu technologii 32nm w 2009 roku. Układy produkowane w technologii 90nm i
65nm, są oparte na technologii dwutlenku krzemu SiO2, a najnowocześniejsze układy 45nm
na zastosowaniu podłoża opartego na hafnie [98].
Rys. 1.1. Rozwój technologii układów scalonych z uwzględnieniem skalowania różnych typów połączeń [50]
Szczególną rolę w miniaturyzacji spełnia problem przesyłania sygnału pomiędzy elementami,
związany z miniaturyzacją i zapewnieniem prawidłowego działania połączeń. Jednym ze
sposobów rozwiązania problemu połączeń, jest stworzenie dodatkowych warstw połączeń, o
różnych parametrach geometrycznych, które umożliwią przesyłanie sygnału na różne
odległości. Taka warstwowa struktura przedstawiona jest na Rys. 1.2.
10
Wprowadzenie
Rys. 1.2. Przekrój przez hierarchiczną strukturę MPU [37]
Dodatkowym problemem związanym z miniaturyzacją, jest takie zaprojektowanie połączeń,
aby sygnał przesyłany był jak najmniej zniekształcony. Dynamiczny rozwój technologii
produkcji układów scalonych spowodował w ostatnich latach gwałtowne zainteresowanie
metodami symulacji dużych obwodów. Zmiany wprowadzane w celu przyspieszenia działania
układów oraz zmniejszenia ich rozmiarów doprowadziły do sytuacji, w której niemożliwe
stało się analizowanie układu elektronicznego bez uwzględnienia wpływu połączeń [5], [19],
[41]. Są one odpowiedzialne za powstawanie zjawisk pasożytniczych, takich jak opóźnienia,
zniekształcenia, odbicia i przeniki. Nieuwzględnienie wpływu połączeń już na etapie
projektowania może doprowadzić do tego, że powstały układ nie będzie spełniał prawidłowo
swojej funkcji, ze względu na efekty pasożytnicze połączeń, pociągające za sobą degradację
sygnału. Dlatego na przestrzeni ostatnich dwudziestu lat, można zaobserwować szerokie
zainteresowanie modelowaniem i symulacją połączeń. W ostatnich latach, szczególnym
zainteresowaniem cieszą się metody obliczania czasów opóźnień dla pojedynczego połączenia
lub układu połączeń sprzężonych. Jak wcześniej wspomniano, często jest to jedyna
możliwość sprawdzenia właściwego funkcjonowania danego połączenia przed wykonaniem
11
Wprowadzenie
układu scalonego. Szczególnym przypadkiem są połączenia wyższych warstw układu (Rys.
1.2), w których ze względu na dużą długość połączenia, stosuje się metody zmniejszające
straty, np. zwiększenie przekroju połączenia, co skutkuje zmniejszeniem rezystancji
połączenia, a co za tym idzie, zbliża analizę takiego połączenia do analizy połączenia
bezstratnego. W takim przypadku prawdziwe staje się założenie:
Rt
<1
Z0
(1.1)
gdzie Rt to całkowita rezystancja połączenia, Z0 impedancja charakterystyczna linii
transmisyjnej bezstratnej modelującej to połączenie.
W artykule dotyczącym połączeń długich Deutsch [25] przyjmuje, że w analizie połączeń
długich to ograniczenie należy przyjąć bardziej restrykcyjnie i można założyć, że połączenia
długie w szybkich układach scalonych można określić, jako spełniające warunek:
Rt
<1
2Z 0
(1.2)
Połączenia wyższych warstw cechują się również większą indukcyjnością. W sygnale
cyfrowym, który można traktować jako złożenie dwóch, przesuniętych względem siebie,
skoków jednostkowych, decydujące znaczenie, z punktu widzenia widma sygnału, ma czas
narastania Tr, który w idealnym przypadku wynosi zero. W praktyce, czas Tr jest różny od
zera, dlatego często wykorzystuje się algorytmy, znajdujące odpowiedź układu na skok
jednostkowy oraz na sygnał narastający. Indukcyjność połączeń wpływa znacząco na kształt
odpowiedzi skokowej lub odpowiedzi na zbocze narastające i powoduje, że w odpowiedzi
skokowej wystąpi przeskok powyżej wartości ustalonej, już dla pierwszej fali wędrownej,
jeśli rezystancja wyjściowa bramki zasilającej nie jest większa od rezystancji połączenia.
Pozwala to uprościć analizę takich połączeń do analizy pierwszej fali wędrownej.
Przykładowy przebieg napięcia dla takiego połączenia przedstawiony jest na Rys. 1.3. Można
zaobserwować, że przejście sygnału przez wartość ustaloną u = 1V następuje dla t = 65ps, a
czas opóźnienia sygnału na połączeniu to T = LC = 44,7 ps . Pierwsza fala wędrowna trwa
na wyjściu połączenia w zakresie T < t < 3T i analiza pierwszej fali wędrownej, w celu
ustalenia opóźnień występujących w połączeniu, będzie w tym przypadku wystarczająca.
12
Wprowadzenie
Rys. 1.3. Przykładowy przebieg napięcia na wyjściu modelu połączenia długiego.
Ponieważ w podobny sposób będą zachowywały się wszystkie połączenia o dużej
indukcyjności i małostratne, a technologia produkcji układów wielkiej częstotliwości przy
połączeniach wyższych warstw takie właśnie połączenia tworzy, praktycznie zawsze przy
połączeniach długich, możemy mówić o przypadku przechodzenia pierwszej fali wędrownej
przez wartość ustaloną sygnału. Technologia tworzenia bramek dopasowanych do impedancji
linii zakłada bardzo często, że Rw < R [25], gdzie Rw jest rezystancją wyjściową bramki.
1.2. Cel i teza pracy
Gwałtowny rozwój technologii produkcji układów VLSI oraz wykorzystanie nowych
materiałów [35], [36], [37] stymuluje zapotrzebowanie na nowe efektywne metody symulacji
obwodów. Współcześnie ujawnił się bardzo duży wpływ połączeń w układach scalonych na
zniekształcenia i opóźnienia sygnału, zatem uwzględnienie ich wpływu staje się niezbędnym
elementem modelowania i symulacji układów cyfrowych o wielkiej skali integracji [41], [14],
[75], [76], [97]. Dodatkowo, bardzo często zamodelowanie połączenia za pomocą
pojedynczego elementu czy czwórnika RC jest niewystarczające i konieczne jest
modelowanie połączenia, za pomocą układu o parametrach rozłożonych. Małostratne
materiały oraz duży stopień scalenia powodują stosunkowo duże wartości jednostkowej
indukcyjności połączeń, która musi zostać uwzględniona w modelu. Najczęściej stosuje się
model w postaci linii transmisyjnej RLC. Kryteria decydujące o konieczności stosowania
takiego modelu można znaleźć między innymi w [76], [39], [26].
13
Wprowadzenie
Celem pracy jest opracowanie nowych technik wyznaczania parametrów związanych z
propagacją sygnału w połączeniach nowoczesnych układów scalonych VLSI.
Wydaje się, że badanie istniejących modeli połączeń oraz stworzenie nowego modelu
uwzględniającego wpływ indukcyjności na propagację sygnału w połączeniach może wnieść
istotny wkład do prac nad modelowaniem i symulacją. W związku z tym sformułowano
następującą tezę:
„Indukcyjność połączeń ogrywa dużą rolę w propagacji sygnału w układach VLSI. Przy
modelowaniu połączeń, konieczne jest korzystanie z modeli uwzględniających
indukcyjności
pasożytnicze
linii
transmisyjnej.
Istnieje
możliwość
stworzenia
efektywnego modelu, opartego na linii transmisyjnej RLC i wyznaczenie wzorów o
zwartej formie, określających napięcie na końcu połączenia oraz czas przejścia przez
napięcie progowe.”
Teza zostanie zweryfikowana za pomocą badań symulacyjnych. Zostaną opracowane metody
obliczania odpowiedzi skokowej i parametrów czasowych pojedynczych i sprzężonych
połączeń, uwzględniających indukcyjność w modelu połączenia oraz przeanalizowany wpływ
indukcyjności połączeń na parametry takie jak:
czasy narastania, osiągania progów napięciowych odpowiadających progom
logicznym,
powstawanie oscylacji sygnału na wejściu bramki obciążającej,
powstawanie przeników w liniach sprzężonych.
Opracowanie rozwiązania będzie polegało na teoretycznym obliczeniu odpowiedzi skokowej
oraz na sygnał narastający, a następnie opracowaniu metody obliczania na jej podstawie
parametrów czasowych.
W szczególności zostaną przeanalizowane metody pozwalające na oszacowanie:
kształtu sygnału na pojemności wejściowej bramki obciążającej, określanego za
pomocą odpowiedzi skokowej,
14
czasu przejścia przez próg napięcia (ang. threshold crossing time) 50% ,
Wprowadzenie
przeników w połączeniach,
wrażliwości odpowiedzi skokowej oraz czasu przejścia przez napięcie progowe, na
zmiany parametrów połączeń.
W rozprawie przedstawione zostaną następujące metody:
wyprowadzenie zależności opisującej rozchodzenie się sygnału w połączeniach,
bezpośrednio z cząstkowych równań różniczkowych opisujących propagację fal prądu
i napięcia w linii transmisyjnej, za pomocą metod perturbacyjnych rozwiązywania
równań różniczkowych,
obliczanie wrażliwości na podstawie zależności na odpowiedź na skok jednostkowy
oraz sygnał narastający,
obliczanie wrażliwości na czas przejścia przez próg napięciowy.
W zależności od właściwości, przedstawione metody zostaną zastosowane w obliczeniach
układu bramka – połączenie – bramka, lub w układach połączeń sprzężonych.
Wyniki otrzymane za pomocą powyższych metod zostaną porównane z efektem działania
programu symulacyjnego PSpice oraz z wynikami przedstawionymi w literaturze.
1.3. Przegląd pracy
Praca podzielona została na 6 rozdziałów. Rozdział 1 zawiera wprowadzenie do analizy i
symulacji szybkich układów cyfrowych oraz problemów związanych z połączeniami w takich
układach. Przedstawiono w nim także cel i tezę rozprawy.
Rozdział 2 prezentuje charakterystykę połączeń w układach scalonych, ich modelowanie i
symulację ze szczególnym zwróceniem uwagi na połączenia o dużej wartości indukcyjności.
Rozdział 3 zawiera analityczne wyprowadzenia odpowiedzi skokowej i na zbocze narastające,
proponowane jako efektywna metoda modelowania odpowiedzi połączenia. W rozdziale
przedstawione zostały też wyniki symulacji i porównanie wyników uzyskanych na podstawie
wyprowadzonej zależności z wynikami uzyskanymi w programie PSpice.
15
Wprowadzenie
Rozdział 4 przedstawia nową metodę obliczania czasów przejścia przez próg dla odpowiedzi
skokowej i na zbocze narastające oraz porównanie wyników uzyskanych z wyprowadzonych
wzorów z wynikami symulacji i wynikami prezentowanymi w literaturze.
Rozdział 5 poświęcony jest zagadnieniom analizy wrażliwości. Przedstawiono wrażliwość
odpowiedzi napięciowej oraz wrażliwość czasu przejścia przez próg napięciowy na parametry
modelu linii transmisyjnej, parametry bramek zasilającej i odbiorczej oraz parametry
geometryczne połączenia.
W rozdziale 6 sformułowano wnioski końcowe oraz przedstawiono podsumowanie
otrzymanych wyników.
16
Połączenia o dużej wartości indukcyjności
2. Połączenia o dużej wartości indukcyjności
2.1. Charakterystyka połączeń w układach scalonych
Technology Roadmap of Semiconductors z 2005 roku [32] przewidywała, że w 2008 roku,
na chipie będzie wytwarzanych do 16 warstw połączeń, a w roku 2017, liczba ta zwiększy się
do 18. Wiele prac poświęconych zagadnieniom technologii, modelowania i symulacji
układów scalonych, przedstawia połączenia, jako kluczowy element projektowania [32],
[33], [78], [89]. W procesach CMOS, używa się kilka (typowo 4-8) warstw metalu, aby
stworzyć połączenia pomiędzy tranzystorami i aby rozprowadzić zasilanie, linie sygnału i
zegara na powierzchni chipu. Dostępność wielowarstwowej struktury połączeń elektrycznie
odizolowanych od siebie za pomocą dielektryka (Si02), umożliwia większą skalę integracji
dla realizacji złożonych struktur, poprzez dodanie trzeciego wymiaru, który może zostać
bardzo dobrze wykorzystany w projektowaniu [48].
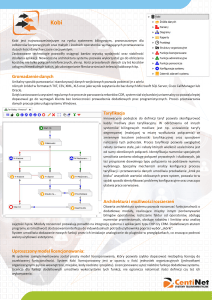
W zadaniach projektowania zintegrowanych układów scalonych typu SOC (ang. System-onChip) można wyróżnić kilka abstrakcyjnych poziomów (Rys. 2.1), z których każdy ma
krytyczny wpływ na ostateczne działanie układu. W rozprawie przedstawione są zagadnienia
związane z poziomem obwodowym.
17
Połączenia o dużej wartości indukcyjności
Rys. 2.1. Zagadnienia projektowania układów scalonych
Szczególne problemy wynikające ze wzrostu szybkości układów scalonych są związane z
czterema
podstawowymi
aspektami:
taktowaniem,
zakłóceniami,
zasilaniem
oraz
niezawodnością działania [19]. W zagadnieniach związanych z taktowaniem podczas
skalowania układów można wyróżnić następujące problemy:
wzrost częstotliwości,
wzrost czasu przejścia przez połączenia, przy jednoczesnym skróceniu czasu
przełączania bramek,
przewaga wartości sprzężeń pojemnościowych pomiędzy połączeniami, nad
pojemnością
pojedynczego
połączenia
(bardzo
duże
wartości
sprzężeń
pojemnościowych pomiędzy połączeniami),
wzrost wpływu indukcyjności na opóźnienia i zniekształcenia sygnału (oscylacje ang. ringing),
18
Połączenia o dużej wartości indukcyjności
wzrost wrażliwości przesunięć czasowych w impulsach zegarowych (ang. clock skew)
na parametry połączenia, a co za tym idzie dokładność procesu wytwarzania.
Autorzy wielu prac próbują rozwiązać powyższe problemy, albo przynajmniej zbadać ich
wpływ na sygnał, w celu dalszej analizy i optymalnego projektowania np. [1],[13],[88].
Szczególne znaczenie, w tego typu badaniach, ma analiza wpływu indukcyjności połączeń.
Wzrost indukcyjności wymaga bowiem zmiany istniejących modeli połączeń na takie, które
będą uwzględniały indukcyjność. Zmiana modelu z kolei, pociąga za sobą zmianę opartych na
starych modelach schematów obliczeń różnych parametrów. Efekty wpływu indukcyjności,
wynikają między innymi z tego, że niektóre połączenia, takie jak globalne linie sygnału i
zegara, w górnych warstwach połączeń, mają większe szerokości i grubości w celu redukcji
opóźnień. To zmniejsza rezystancję tych połączeń, co z kolei powoduje, że wartość reaktancji
indukcyjnej staje się porównywalna do rezystancji. Wpływ indukcyjności zwiększa się też
dzięki temu, że wraz ze wzrostem częstotliwości i zmniejszaniem czasu narastania, sygnał
elektryczny zawiera coraz więcej składowych wielkoczęstotliwościowych [96]. Dodatkowo,
im większe są rozmiary układów scalonych, tym więcej połączeń ma znaczne długości (w
przypadku połączeń na płytce drukowanej nawet powyżej kilku cm) i są rozmieszczone
równolegle względem siebie, co skutkuje wzrostem indukcyjności wzajemnej i przenikami
indukcyjnymi. Również wprowadzanie nowych niskorezystancyjnych materiałów, w celu
zmniejszenia tłumienia w połączeniach, zwiększa wpływ wartości indukcyjności na przebieg
sygnału. Na rysunku (Rys. 2.2) przedstawiono zależność rezystancji i reaktancji
indukcyjnościowej połączeń dla częstotliwości 1GHz dla różnych wymiarów geometrycznych
połączeń.
W przypadku rozważania połączeń wewnątrz układu scalonego (ang. on-chip interconnects),
konieczne jest zwrócenie uwagi na kilka ważnych aspektów, różniących te połączenia od
połączeń na płytkach drukowanych (PCB), lub połączeń wyprowadzających przy obudowach
układów scalonych. W przypadku połączeń wewnątrz układu scalonego, konieczne jest
uwzględnienie
wewnętrznej
indukcyjności,
związanej
z
występowaniem
zjawiska
naskórkowego. Sprzężenia pomiędzy połączeniami wewnątrz układu występują nawet dla
dalej od siebie położonych połączeń i w bardzo niewielkim stopniu zależą od zwiększania
odległości pomiędzy połączeniami. Dodatkowo indukcyjność połączeń „on-chip” nie jest
skalowalna wraz długością połączenia.
19
Połączenia o dużej wartości indukcyjności
Rys. 2.2 Porównanie rezystancji i reaktancji indukcyjnościowej [64] (w-szerokość ścieżki)
2.2. Modelowanie
Dla wielkich częstotliwości, czas potrzebny do przesłania sygnału z jednej części obwodu do
innej części, jest często dłuższy niż czas narastania sygnału, a czasem nawet dłuższy niż czas
trwania impulsu danych. Ze względu na zadania, jakie spełniają w układzie scalonym,
zazwyczaj dzieli się połączenia na połączenia lokalne (ang. local wires) i globalne (ang.
global wires). Połączenia lokalne łączą bramki wewnątrz bloku, i wraz ze rozwojem
technologii polegającym na zmniejszaniu bramek, stają się coraz krótsze. Połączenia globalne
łączą bloki między sobą i zwykle pokrywają znaczącą część układu scalonego. Nie
zmniejszają się wraz ze zmniejszaniem bramek, a nawet wykazują tendencję do zwiększania
długości wraz ze zwiększaniem rozmiarów układu scalonego. Można wyróżnić trzy typy
połączeń: połączenia elektrycznie krótkie, średnie i długie [26]. Warunki pozwalające
zaklasyfikować je do danego typu połączeń, przedstawiono w tabeli poniżej (Tabela 2.1).
20
Połączenia o dużej wartości indukcyjności
Tabela 2.1 Rodzaje połączeń w układach VLSI (R,L,C - rezystancja, indukcyjność i pojemność połączenia, d długość połączenia, λ - długość fali składowej o najwyższej uwzględnianej częstotliwości, Tr-czas
narastania napięcia zasilającego)
Połączenia krótkie
Ω
cm
d << λ
d
<< π T
r
LC
R > 500
Połączenia średnie
Ω
cm
d <λ
R < 500
d
< π Tr
LC
Połączenia długie
Ω
cm
d ≈λ
R < 100
d
≈ π Tr
LC
Większość połączeń w układzie scalonym to połączenia krótkie, o maksymalnych długościach
1-3mm. Takie połączenia mają minimalne, z punktu widzenia technologicznego, rozmiary i są
zasilane z bramek o dużej impedancji wyjściowej, porównywalnej do impedancji
charakterystycznej połączenia. Połączenie tego typu można modelować jako skupioną
pojemność [14], [26]. W połączeniach krótkich można też zauważyć bardzo silne sprzężenia
pojemnościowe pomiędzy ścieżkami. Wraz ze wzrostem szybkości działania obwodów,
opóźnienia wnoszone przez połączenia zaczynają przekraczać opóźnienia generowane przez
bloki logiczne, gdyż niewielkie przekroje połączenia powodują występowanie bardzo dużych
rezystancji połączeń, dlatego większość połączeń w układzie scalonym jest reprezentowana
przez modele RC. Dla połączeń bardzo krótkich, zwykle wystarczy pojedyncza sekcja RC
[19]. Jeżeli długość połączenia jest jednak większa, a sygnał zawiera wyższe składowe
harmoniczne, konieczne staje się modelowanie połączenia, jako kilku sekcji połączonych
łańcuchowo. Połączenia oznaczone w tabeli (Tabela 2.1) jako średnie, w celu zwiększenia
maksymalnej użytecznej długości, są szersze niż połączenia krótkie, co zmniejsza ich
rezystancję i umożliwia przesyłanie sygnału na większe odległości. W przypadku połączeń
średnich, zwykle wystarcza modelowanie za pomocą obwodu RC o parametrach rozłożonych.
Uwzględnienie indukcyjności z reguły nie wpływa znacząco na zgodność wyników
modelowania z pomiarami. W połączeniach sprzężonych wartości sprzężeń są mniejsze niż w
połączeniach lokalnych, należy też wziąć pod uwagę sprzężenia indukcyjne, aby zapobiec
niedoszacowaniu zakłóceń [26]. Do połączeń długich należą zasadniczo trzy kategorie:
połączenia rozprowadzające sygnał zegara, szyny danych i kontroli. Linie kontrolne są
pojedynczymi połączeniami i mogą być dłuższe niż szerokość układu scalonego. Mogą też
mięć bardzo duże obciążalności wyjściowe (ang. fan-out). Linie danych łączą jednostkę
centralną z pamięcią podręczną i mają zazwyczaj długość ok. połowy szerokości układu
scalonego, z reguły są obciążone odbiornikami o małych wartościach obciążenia. Stanowią
21
Połączenia o dużej wartości indukcyjności
one niewielki procent wszystkich połączeń w układzie scalonym, w związku z tym mogą być
umieszczone na najwyższych i najgrubszych warstwach połączeń. Linie zegarowe są
pojedynczymi rozgałęziającymi się liniami rozprowadzającymi sygnał od centralnie
ulokowanego buforu do brzegów układu scalonego [100]. Idealna struktura gwarantująca
jednakowe opóźnienia we wszystkich punktach, do których dochodzi sygnał zegara,
przedstawiona jest na Rys. 2.3. Pojedyncza gałąź może mieć długość równą połowie rozmiaru
układu scalonego.
Rys. 2.3. Struktura połączeń prowadzących sygnał zegarowy w kształcie drzewa (H-tree). [48]
Przy modelowaniu połączeń zegarowych, jak i pozostałych połączeń długich konieczne jest
wykorzystanie rozproszonego modelu RLC. Korzystanie z modelu RC może powodować 3742% [64] błąd w stosunku do najlepszego modelu, jakim jest model RLC z parametrami RLC
zależnymi od częstotliwości. Wartości konduktancji z ogólnego modelu RLCG można
pominąć jako małe [99]. Korzystanie z modelu RLC jest konieczne, szczególnie przy
połączeniach o większym przekroju, które wykazują zachowanie podobne do linii bezstratnej
LC. Połączenia najwyższych warstw można traktować jako linie paskowe (ang. microstrip)
(Rys. 2.4). W technologii 65nm połączenia globalne mogą być nawet kilkakrotnie szersze niż
połączenia lokalne (Tabela 2.2).
22
Połączenia o dużej wartości indukcyjności
Rys. 2.4. Linia paskowa z zaznaczonymi parametrami [10]
Tabela 2.2. Rozmiary połączeń dla technologie 65nm i 90nm [10]
Technologia 65nm
Lokalne
Średnie
Globalne
szerokość w
(um)
0.10
0.14
0.45
odległość s
(um)
0.10
0.14
0.45
grubość h
(um)
0.20
0.35
1.20
wysokość H
(um)
0.20
0.20
0.20
kILD
2.2
2.2
2.2
Technologia 90nm
Lokalne
Średnie
Globalne
szerokość w
(um)
0.15
0.20
0.50
odległość s
(um)
0.15
0.20
0.50
grubość h
(um)
0.30
0.45
1.20
wysokość H
(um)
0.30
0.30
0.30
kILD
2.8
2.8
2.8
Przy omawianiu zagadnienia modelowania połączeń, konieczne jest poruszenie zagadnienia
modelowania bramek nadających oraz odbierających sygnał (Rys. 2.5).
Bramki, są jak wiadomo elementami nieliniowymi, mimo to, zazwyczaj ich modelowanie dla
uproszczenia analizowanej struktury, ogranicza się do uwzględnienia rezystancji wyjściowej
bramki nadajnika i pojemności wejściowej bramki odbiornika [89]. Wartości rezystancji
bramek, stosowanych do zasilania połączeń długich, osiągają wartości rzędu: Z drv < Z 0 [26],
natomiast wartości pojemności obciążających są z reguły mniejsze niż wartość pojemności
połączenia [41], [47].
23
Połączenia o dużej wartości indukcyjności
Rys. 2.5. Układ bramka-połączenie-bramka
Modelowanie parametrów RLC zależy od struktury połączenia. W pracy autorka zajmuje się
połączeniami typu linia mikropaskowa (Rys. 2.6). Wyznaczenie parametrów RLC, na
podstawie analitycznych zależności na parametry geometryczne można znaleźć m.in. w [42],
[19]. Szczególnie dużo prac zostało poświęconych analizie indukcyjności własnej i
wzajemnej pomiędzy połączeniami [4], [12], [29]. W rozprawie, w celu badania wrażliwości
na parametry geometryczne ( rozdziały 5.1.4, 5.2.4 5.3.2), zostały wykorzystane zależności z
[42].
Rys. 2.6. Linia mikropaskowa z zaznaczonymi parametrami geometrycznymi.
2.3. Symulacja
Dynamiczny rozwój technologii produkcji układów scalonych spowodował w ostatnich latach
gwałtowne
zainteresowanie
metodami
symulacji
dużych
obwodów.
Zagadnienie
modelowania i symulacji połączeń obejmuje dwie podstawowe grupy problemów: dotyczące
24
Połączenia o dużej wartości indukcyjności
ekstrakcji parametrów połączenia, np. [4], [77], [97] w celu zbudowania modelu oraz szeroko
pojęte problemy związane z symulacją, zarówno pojedynczego połączenia, jak i systemu
elektronicznego VLSI [6], [7], [16], [24]. Z teoretycznego punktu widzenia, zespoły połączeń
całego układu scalonego, propagując sygnał, generują pole elektromagnetyczne, które
wpływa na pracę pozostałych połączeń, a tym samym na pracę układu. Z reguły jednak,
połączenia znacznie oddalone od siebie nie oddziałują na siebie nawzajem na tyle, by zakłócić
pracę. Rozważając zachowanie całego układu, lub jego większej części konieczne jest
skorzystanie z metod umożliwiających symulację dużych układów metodami analitycznymi,
lub bazującymi na symulacji elektromagnetycznej 3D [24], [73]. Duża część prac
poświęconych obliczeniom odpowiedzi połączenia bazuje na metodach numerycznych [31],
[63], [72], opierających się na podzieleniu linii na sekcje i wyznaczaniu odpowiedzi w
kolejnych węzłach sieci. Techniki oparte na metodach numerycznych zwykle potrzebują
dużych mocy obliczeniowych i trwają stosunkowo długo. Metody numeryczne korzystają
m.in. z obliczeń funkcji splotu, wykorzystując parametry rozproszenia [6], [81], [85], metod
opartych na zmiennych stanu [81] oraz metod redukcji, bazujących na aproksymacji Padego,
np. AWE (ang. Asymptotic Waveform Evaluation) – metoda asymptotycznego oszacowania
przebiegu [14], [20], [74]. Rozwiązania algorytmów, umożliwiających obliczanie odpowiedzi
skokowej, często są udoskonalane, lub modyfikowane w taki sposób, by były jak najmniej
złożone obliczeniowo. Jednak opracowywanie modelu całościowego takiego układu,
uwzględniającego wpływ wszystkich połączeń, generuje modele matematyczne, których
rozmiary przekraczają możliwości istniejących programów symulacyjnych. W praktyce
okazuje się, że w takim przypadku, dobrą metodą jest wydzielanie fragmentów obwodu
i poddawanie ich szczegółowej analizie. W związku z tym, potrzebne są efektywne metody
analizy dla pojedynczego połączenia, lub kilku najbliżej sąsiadujących połączeń sprzężonych.
W przypadku połączeń długich, będą to metody oparte na modelu linii transmisyjnej RLC
[17], [23], [24], [38], [44], [45]. Analiza połączeń często opiera się na odpowiedzi skokowej,
na podstawie której wyznaczane są parametry czasowe. Powstają też metody rozszerzające
otrzymane wyniki dla wymuszenia skokiem jednostkowym na inne rodzaje wymuszeń, w
szczególności na sygnał narastający. W przypadku modelowania pojedynczego połączenia
szczególnie przydatne są modele w postaci zwartych formuł (wzorów). Problematykę analizy
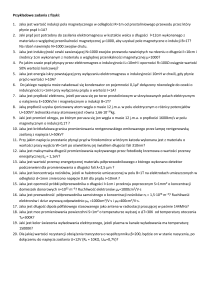
i symulacji połączeń w nowoczesnych układach scalonych ilustruje schemat na rys. 2.6.
W ostatnich latach, szczególnym zainteresowaniem cieszą się metody obliczania czasów
opóźnień dla pojedynczego połączenia, lub układu połączeń sprzężonych, oparte na prostych
25
Połączenia o dużej wartości indukcyjności
wzorach, zależnych od parametrów połączenia. Jak wcześniej wspomniano, często jest to
jedyna możliwość sprawdzenia właściwego funkcjonowania danego połączenia przed
wykonaniem układu scalonego.
Symulacja połączeń w nowoczesnych
obwodach VLSI
Symulacja dużych struktur
połączeń – automatyczne
metody redukcji
Symulacja pojedynczego
połączenia w układzie:
Symulacja układów połączeń
sprzężonych
• Analiza wpływu sprzężeń
między połączeniami na
przebieg sygnału
• Analiza przeników
bramka – połączenie - bramka
• Analiza zniekształceń sygnału po
przejściu przez połączenie
• Analiza opóźnień
• Estymacja czasu osiągnięcia
progów sygnału
• Estymacja czasu opóźnienia
• Przeregulowanie odpowiedzi
skokowej
• Badanie wrażliwości odpowiedzi
skokowej na zmiany parametrów
połączeń
Obszar tematyczny pracy
Rys. 2.7. Zagadnienia symulacji układów scalonych
Wydaje się, że najbardziej przydatne są metody spełniające następujące wymagania dotyczące
postaci wzorów:
26
prosta, zwarta forma (closed-form formula), łatwa do implementacji,
zależne od kilku krytycznych parametrów obwodu,
właściwe dla szerokiego zakresu stałych czasowych i węzłów obwodu,
zastosowanie zarówno dla odpowiedzi skokowej, jak i na zbocze narastające..
Połączenia o dużej wartości indukcyjności
Powyższe warunki zostały sformułowane w [2] w zastosowaniu do obliczania opóźnień w
układach rozgałęziających się drzewiasto dla połączeń zegarowych modelowanych za pomocą
układów RC.
Spełnienie powyższych warunków przy tworzeniu algorytmów analizy pojedynczych
połączeń, połączeń sprzężonych, zarówno opartych na modelach RC, jak i RLC pozwala na
efektywniejsze ich wykorzystanie. W kolejnych podrozdziałach przedstawiony zostanie
wykorzystany model linii transmisyjnej RLC, zasadnicze cechy tego modelu oraz
proponowane w literaturze metody obliczania odpowiedzi skokowej i na zbocze narastające
oraz metody obliczania czasów opóźnień.
2.3.1. Linia transmisyjna RLC
2.3.2. Równania linii transmisyjnej
W przypadku prostych połączeń, do modelowania najczęściej stosuje się model linii
transmisyjnej jednorodnej, co wiąże się z przyjęciem idealizacji warunków rzeczywistych,
polegającej na założeniu, że parametry są równomiernie rozłożone wzdłuż linii. Linię
jednorodną możemy przedstawić, jako N połączonych ze sobą szeregowo, nieskończenie
małych elementów, o długości dx, z których każdy ma rezystancję czynną R ⋅ d x ,
indukcyjność L ⋅ d x , konduktancję czynną G ⋅ d x oraz pojemność C ⋅ d x , gdzie R , L , G , C
są parametrami linii jednorodnej, odniesionymi do jednostki jej długości, a x oznacza
odległość od początku linii do bieżącego elementu jej długości (Rys. 2.8) [71], [73].
Rys. 2.8. Model linii transmisyjnej jednorodnej o parametrach rozłożonych
27
Połączenia o dużej wartości indukcyjności
Równania linii transmisyjnej w ogólnej postaci można zapisać jako [87]:
−
∂v
∂i
= R⋅i + L⋅
∂x
∂t
(2.1)
−
∂i
∂v
= G⋅v +C ⋅
∂x
∂t
(2.2)
Po przyjęciu określonych warunków początkowych i brzegowych, układ równań (2.1) - (2.2)
pozwala na wyznaczenie prądu i napięcia w funkcji położenia względem początku linii oraz
czasu.
Przyjmując modelowanie bramki wejściowej i wyjściowej, jako rezystancję wyjściową i
obciążenie pojemnością wejściową, możemy przedstawić model połączenia jak na Rys. 2.9.
Ze względu na to, że idealny sygnał cyfrowy reprezentujący 1 bit można traktować jako
złożenie dwóch skoków jednostkowych przesuniętych w czasie, dla uproszczenia rachunków
zwykle przyjmuje się zasilanie w postaci skoku jednostkowego, lub dla modelowania lepiej
odwzorowującego rzeczywiste sygnały, wymuszenie zboczem narastającym (Rys. 2.10) [65].
Rys. 2.9 a) schemat blokowy układu bramka-połączenie-bramka, b) model obwodowy tego układu
W zależności od wartości parametrów linii transmisyjnej, modelującej połączenie, możemy
mówić o połączeniach stratnych (muszą zostać uwzględnione wszystkie parametry RLC) oraz
bezstratnych (wartość rezystancji jest pomijalnie mała). Analizując współczesne połączenia,
często mówi się o liniach małostratnych, w których wartość rezystancji nie jest pomijalna,
jednak ze względu na dużą wartość indukcyjności, impedancja charakterystyczna linii
bezstratnej jest większa niż rezystancja.
28
Połączenia o dużej wartości indukcyjności
Rys. 2.10. Modelowanie sygnałów cyfrowych
Poniżej przedstawione zostaną rozważania dotyczące linii transmisyjnej bezstratnej i stratnej,
w celu porównania z linią małostratną i sformułowania wniosków przydatnych w dalszej
części pracy. Na podstawie równań linii transmisyjnej (2.1) - (2.2) oraz warunków
brzegowych, można wyprowadzić równanie [71] określające napięcie na końcu połączenia:
V2 ( s ) =
(1 + ρ 0 (s) )e −γ ( s ) d
E0 Z c ( s )
s Rs + Z c ( s ) 1 − ρ 0 ( s ) ρ w ( s ) e − 2 γ ( s ) d
(2.3)
gdzie:
Z c (s) =
γ (s) =
R + sL
- impedancja charakterystyczna linii,
sC
(R + sL )sC - współczynnik propagacji,
1
− Z c (s)
sC0
ρ 0 (s) =
- współczynnik odbicia od zacisków wtórnych,
1
+ Z c (s)
sC0
ρ w (s) =
Rs − Z c ( s )
- współczynnik odbicia od zacisków pierwotnych.
Rs + Z c ( s )
Wzór (2.3) można zapisać, jako szereg postaci:
V2 ( s ) = ∑ U n ( s ) ,
∞
n =0
(2.4)
gdzie:
29
Połączenia o dużej wartości indukcyjności
U n ( s) = U 0 ( s) ⋅ H ( s) n
U 0 (s) =
H (s) =
oraz α =
E0
s
(2.5)
,
s +α
2e −T s ( s+α )
,
s + α + β s 1 + τ s( s + α )
β s − s + α 1 − τ s ( s + α ) − 2T
e
β s + s + α 1 + τ s(s + α )
s ( s +α )
(2.6)
,
(2.7)
R
R
L
, β = s , Z0 =
, T = Ct Lt , τ = Z 0C0 , Lt = L ⋅ d , Ct = C ⋅ d .
L
Z0
C
Napięcie u0(t) odpowiada sygnałowi wyjściowemu dla 0 ≤ t ≤ 3T , u0(t)+u1(t) dla 0 ≤ t ≤ 5T ,
N
natomiast
v2 N (t ) = ∑ u n (t )
0 ≤ t ≤ ( 2 N + 3)T ,
dla
co
odpowiada kolejnym
falom
n=0
wędrownym.
Obliczenie odwrotnej transformaty Laplace’a przy takiej konfiguracji nie jest proste i
zasadniczo wymaga procedur numerycznych. Jest jednak możliwa analiza wartości
granicznych oraz analityczne obliczenie napięcia u0(t) przy pewnych założeniach
upraszczających.
Dla linii bezstratnej parametr R≡0 (α=0) można w prosty sposób obliczyć napięcie v2(t).
Charakterystyczne wartości tego sygnału (wartość ustalona poszczególnych fal oraz
nachylenie w punkcie t=T) dane są zależnościami:
un (2n + 1)T + = lim sU n (s)e s (2 n+1)T = 0 ,
(2.8)
β − 1)n
(
un (∞ ) = lim sU n ( s ) = 2 E0
,
s →0
(β + 1)n+1
(2.9)
du (t )
2 E0 (β − 1)
Dn = n
=
(−1) n .
n +1
τ (β + 1)
dt t =( 2 n+1)T +
(2.10)
(
)
s→∞
n
30
Połączenia o dużej wartości indukcyjności
Można łatwo zauważyć, że dla n=0 u n (∞ ) =
2 E0
> 0 oraz D0>0. Dla n>0 znak u0(∞) zależy
β +1
od wartości parametru β i n. Kolejne fale wędrowne un(∞) zmniejszaj
niejszają sukcesywnie swoją
wartość, gdyż
(β − 1) < 11.
(β + 1)
Dla β=1, czyli w sytuacji dopasowania na wejściu linii,
v2(t) = u0(t). Znak pochodnej fali napięciowej zależy również od wartości β. Dla β <1 jest
zawsze dodatni, dla β>1 jest dodatni dla parzystych
parzystych n, natomiast dla nieparzystych jest
ujemny. Wyniki powyższych rozważań zostały przedstawione na poglądowych wykresach
(Rys. 2.11, Rys. 2.12). Lini
inią ciągłą zaznaczono fragmenty, które można wyliczyć z podanych
zależności, natomiast linią przerywaną hipotetyczny przebieg sygnału.
Rys. 2.11. Napięcie
ęcie zerowej fali w
wędrownej u0(t) dla różnych wartości
ści parametru β
Rys. 2.12. Napięcie
ęcie pierwszej fali wędrownej u0(t) dla różnych wartości
ści parametru β
31
Połączenia o dużej wartości indukcyjności
Po obliczeniu v2(t) [71] otrzymamy:
v2 (t ) = ∑ u n (t ) ,
(2.11)
∞
n =0
gdzie:
u 0 (t ) =
−
2 E0
1− e
β +1
t −T
τ
⋅ 1(t − T ) .
(2.12)
W ogólności:
2 E0
u n (t ) =
( β + 1) ⋅ τ
β −1
⋅ ϕ (t − (2n + 1)T , n) ,
β + 1
(2.13)
2 x −τ dx
,
e
τ
(2.14)
n
n = 0, 1, 2, …, natomiast
t
ϕ (t , n ) = (− 1)n ∫ Ln
0
x
gdzie Ln(x) – wielomiany Laguerra.
Inaczej:
n −r
t − (2n + 1)T
t −( 2 n +1)T n
−
τ
un (t ) = 1 + e τ ∑ A(n, r )
(n − r )!
r =0
n
2 E0 β − 1
⋅ ( β + 1) β + 1 1(t − (2n + 1)T ) ,
(2.15)
1 for r = 0
Gdzie A(n, r ) =
.
(−1) r +1 n n r
− 2 n ⋅
⋅
(
k
−
i
)
∑ ∏
r! k =0 k i=1
Sumując przebiegi z wykresów Rys. 2.11 oraz Rys. 2.12 dla różnych wartości β można
przedstawić hipotetyczny przebieg sygnału (Rys. 2.13).
32
Połączenia o dużej wartości indukcyjności
β<1
β=1
β>1
Rys. 2.13. Przebieg vout(t) w linii bezstratnej dla różnych wartości β
Dla linii stratnych można przeprowadzić podobne jak poprzednio rozważania dotyczące
wartości charakterystycznych.
u n ( 2 n + 1)T + = 0 ,
(
(2.16)
)
u n (∞ ) = lim sU n ( s ) = 2 E0 (− 1) ,
(2.17)
n
s →0
(
)
Dn = un(1) (2n + 1)T + =
2 E0 (1 − β ) −(2 n+1) 2
e
.
τ (β + 1)n+1
n
αT
(2.18)
Na podstawie powyższych zależności można przeprowadzić podobne rozważania jak dla linii
bezstratnej. Wartość napięcia każdej fali dąży do ustalonej wartości równej ±2E0. Kolejne fale
αT
mają nachylenia o wartości malejącej e
−( 2 n +1)
2
krotnie. u1(t) zmienia znak na ujemny tylko raz
dla β<1, jednak jak wynika z przeprowadzonych w PSpice symulacji dla β>1 przecina oś zero
dwukrotnie. Wyniki przedstawiono na wykresach (Rys. 2.14 oraz Rys. 2.15).
33
Połączenia o dużej wartości indukcyjności
Rys. 2.14. Przebieg uo(t) w linii stratnej
Rys. 2.15. Przebieg u1(t) w linii stratnej
W ogólnym przypadku nie jest
st możliwe wyznaczenie odpowiedzi czasowej. Jest to możliwe
tylko przy założeniu pewnych uproszczeń. W przypadku linii małostratnej wydaje się być
poprawne przyjęcie następującego założenia [62]:
s + α = s 1+
α
s
F ( p) = 1 +
= s F ( p) ,
(2.19)
1
,
p
(2.20)
p = s / α - znormalizowana zmienna zespolona.
34
Połączenia o dużej wartości indukcyjności
Funkcję F(p) można aproksymować np. korzystając z dwóch pierwszych wyrazów
rozwinięcia dwumianowego:
F ( p) ≅ 1 +
1
.
2p
(2.21)
Zastosowanie takiego przybliżenia jest ograniczone [26] do przypadków spełniających
warunek:
R < ω g L , ωg =
0.34
2π ,
Tr
(2.22)
gdzie Tr jest czasem narastania sygnału na wejściu. W przypadku idealnym, dla skoku
jednostkowego Tr =0, ale w praktyce jest równy ok. (50-100)ps, co daje ωg=(4,4-8,8)·1010
rad/s [26].
W takim przypadku un(∞) oraz Dn=un((2n+1)T może być przedstawione jako:
ατ
1 −
αT
2 −(2 n+1) 2
u n (∞ ) = 2 E0
e
n +1
ατ
1 +
2
n
Dn = u
(1)
n
((2n + 1)T )
+
(2.23)
2 E0 (1 − β ) −(2 n+1) 2
=
e
τ (β + 1)n+1
n
αT
(2.24)
Powyższe zależności pokazują, że linia małostratna stanowi dobre przybliżenie dla stratnej
linii dla początku trwania sygnału, szczególnie dla dużych częstotliwości, ponieważ wzory
określające nachylenie w momencie pojawienia się sygnału na wyjściu są takie same. Różni
się natomiast stan ustalony kolejnych fal wędrownych, błąd aproksymacji narasta wraz ze
zwiększaniem się czasu.
2.3.3. Obliczanie odpowiedzi połączenia
Wielu autorów [30], [81], [88] zajmuje się obliczaniem odpowiedzi skokowej połączenia,
znając odpowiedź, można bowiem wyznaczyć parametry czasowe, takie jak czas opóźnienia
sygnału, czas narastania, przeregulowanie (przeskok sygnału ponad wartość ustaloną) oraz
35
Połączenia o dużej wartości indukcyjności
przy uwzględnieniu wzajemnych parametrów pasożytniczych, również zakłócenia pomiędzy
połączeniami. Poniżej zostanie przedstawionych kilka metod obliczania odpowiedzi
połączenia, przedstawionego na Rys. 2.9, dla modelu w postaci stratnej linii transmisyjnej
RLC.
Dla układu linii transmisyjnej RLC obciążonej pojemnością C0 i zasilanej ze źródła o
rzeczywistej rezystancji wewnętrznej Rw, jak wcześniej wspomniano, nie jest możliwe
analityczne wyznaczenie odpowiedzi napięciowej. W związku z tym, metody analityczne
oparte są na pewnych uproszczeniach modelu linii transmisyjnej. Część prac poświęconych
temu zagadnieniu aproksymuje odpowiedź skokową na podstawie uproszczeń w transmitancji
linii transmisyjnej. Do innego typu modelowania można zaliczyć pracę [17], w której autorzy
obliczają dokładną odpowiedź linii transmisyjnej rozwartej, wykorzystującą funkcje Bessla,
tak modyfikując wcześniej parametry RLC, aby uwzględniały wpływ pojemności
obciążającej. Modyfikacja parametrów opiera się na dopasowaniu transmitancji obwodu
uproszczonego w taki sposób, aby odpowiadała transmitancji układu oryginalnego. W celu
uzyskania dodatkowych uproszczeń umożliwiających wyznaczenie parametrów czasowych na
podstawie odpowiedzi układu, autorzy przybliżają otrzymaną zależność krzywą fragmentami
liniową (model PWL). Autorzy rozszerzają też wyprowadzenie w taki sposób, aby umożliwić
obliczenie odpowiedzi na zbocze narastające . W pracy [95] zaproponowano metodę
obliczania odpowiedzi układu połączenia na podstawie układu RLC o stałych rozłożonych.
Metoda opiera się na redukcji modelu w przestrzeni stanu. Autorzy prezentują wyniki
pozwalające na redukcję ilości rozważanych sekcji RLC o ponad połowę. Układ można za
pomocą zaprezentowanej metody zredukować nawet do jednej sekcji RLC, jednak powstały
błąd jest stosunkowo duży. Inną metodę proponują autorzy w [28]. Aproksymują oni
odpowiedź skokową w dziedzinie częstotliwości, w celu zredukowania funkcji odpowiedzi
tak, aby zawierała trzy bieguny. Dodatkowo autorzy wprowadzają modelowanie narastania
uwzględniające propagację fal wędrownych modyfikując rozwiązanie dla układu linii
transmisyjnej RC. W pracy [30] zaproponowano model obliczeń odpowiedzi na zbocze
narastające. Metoda polega na wykorzystaniu odpowiedzi dla linii transmisyjnej rozwartej o
skończonej długości. Aby metoda mogła być wykorzystana w obliczeniach opóźnień
pojemność na obciążeniu połączenia musi być mała w stosunku do pojemności połączenia.
Metodę obliczania odpowiedzi dla układu z obciążeniem pojemnościowym zaproponowano w
[92]. W tym celu wykorzystano rozwiązanie dla linii transmisyjnej o nieskończonej długości.
36
Połączenia o dużej wartości indukcyjności
Zmodyfikowano współczynnik odbicia zapisując go w postaci szeregu. Rozwiązanie to
można rozszerzyć na zbocze narastające [93].
Na podstawie założenia o małej stratności linii transmisyjnej, jak podano wcześniej, można
założyć pewne uproszczenie (2.20). W rezultacie pierwsza fala wędrowna w postaci
operatorowej będzie miała postać:
α
(2.25)
β − 1 s + α1− α 2− − s −sT
⋅
⋅
⋅e
β + 1 s + α 1+ α 2+ + s
(2.26)
αT
−
s+
− sT
2 E0 ⋅ e 2
2 ⋅ e
U 0 ( s) =
⋅
τ (β + 1)s s + α1+ s + α 2+
H ( s ) = e −αT ⋅
gdzie α 1+ =
2 − ατ
2 + ατ
α
α
, α 1− =
, α 2− =
, α 2+ =
.
2τ
2τ
2(β + 1)
2(β − 1)
Obliczenie odwrotnej transformaty Laplace'a funkcji (2.25) pozwala na otrzymanie zależności
na pierwszą falę wędrowną [62] w postaci czasowej:
α (t − T )
2α (β + 1)
2τβ (β + 1) − 2(β +1)
2 E 0 ⋅ e 2 ατ + 2 − ατβ + 2(β + 1) e
⋅1(t − T )
u 0 (t ) =
.
τ (β + 1)
(ατ + 2 )(t −T )
−
2τ
+ 4τ (β + 1)e
−
αT
(2.27)
2.3.4. Obliczenia czasów opóźnień
Najprostszą formą oceny działania układów scalonych jest analiza opóźnień. Elmore [27]
wprowadził w 1948r metodę obliczania opóźnień dla obwodów wzmacniaczy, które Penfield i
Rubinstain [14] jako pierwsi użyli do analizowania drzew RC. Opóźnienie Elmora (ang.
Elmore Delay) jest prostą metodą obliczania czasów opóźnień w połączeniach modelowanych
układami RC, polegającą na przybliżeniu opóźnienia pierwszym momentem odpowiedzi
impulsowej. Ponieważ odpowiedź skokowa jest całką odpowiedzi impulsowej, 50procentowe opóźnienie, określone jako czas, po którym napięcie na kondensatorze
obciążającym osiągnie poziom E0/2 dla odpowiedzi skokowej, o wartości wymuszenia E0, jest
czasem τ wynikającym z zależności:
37
Połączenia o dużej wartości indukcyjności
τ
∫ h(t )dt = 0.5
0
(2.28)
Elmore zaproponował, aby aproksymować wartość τ, rozumianą jako opóźnienie odpowiedzi
skokowej, wynikające z czasu narastania sygnału na wyjściu, średnią odpowiednich
nieujemnych odpowiedzi impulsowych funkcji h(t). Traktując nieujemną odpowiedź
impulsową, jako funkcję gęstości prawdopodobieństwa, średnia zdefiniowana jest przez
pierwszy moment odpowiedzi impulsowej. W związku z powyższym, oznaczając jako TD
opóźnienie Elmora, otrzymamy:
∞
d
TD = ∫ t ⋅ h(t )dt = − H ( s )
= − m1
ds
0
s =0
(2.29)
Obliczanie opóźnień, korzystając z powyższej zależności, jest szczególnie przydatne w
zagadnieniach drzew RC, ze względu na to, że opóźnienia pomiędzy wejściem i dowolnym
punktem obwodu jest sumą stałych czasowych RC [14], wg zależności:
TD =
N
∑ RkiCk
(2.30)
k =1
Gdzie i jest numerem węzła, w którym chcemy obliczyć opóźnienie, a N jest liczbą sekcji
obwodu.
Korzystając z klasycznej definicji opóźnienia Elmore’a można wyprowadzić czas opóźnienia
dla aproksymacji biegunów dominujących, jako ok. 0.639 wartości podanej w zależności [99].
Jednak dość trudno jest jednoznacznie stwierdzić, która z wartości bardziej odpowiada
wartości rzeczywistej. Dlatego wielu autorów próbowało rozwijać zagadnienie opóźnienia
Elmora, korzystając z różnych aproksymacji, uwzględniając dwa dwóch pierwsze momenty
[1], [2], [49], trzy momenty [91], lub większą ilości momentów wyższych rzędów [40] dla
przypadków odpowiedzi na sygnał skoku jednostkowego, lub zbocze narastające.
Rozwinięcie tego tematu można znaleźć w [14]. Wraz z rozwojem technologii i koniecznością
stosowania modeli połączeń, opartych na liniach RLC, nastąpił kolejny etap w symulacji.
Jednym ze sposobów przybliżania wartości opóźnienia obwodu stały się modyfikacje
opóźnienia Elmora, uwzględniające wpływ indukcyjności [40].
38
Połączenia o dużej wartości indukcyjności
W pracy [23] przedstawiono zależność na opóźnienie połączenia modelowanego linią RLC,
jako rozszerzenie podejścia zaprezentowanego w [84] dla linii RC. Zależność na 50procentowe opóźnienie, przedstawiona w pracy [23], ma postać:
TD = 0.693Rtr Cd + 0.377 RCd 2 dla
TD =
4Z 0
R
lub Rtr < 3Z 0
≥ 2 ln
Z0
Rtr + Z 0
4Z 0
R
d
i Rtr < 3Z 0
≤ 2 ln
dla
Z0
R
Z
+
LC
0
tr
(2.31)
(2.32)
Dodatkowo autorzy w [93] przedstawili połączony model dla obliczania czasu 50procentowego opóźnienia na odpowiedź skokową, uwzględniający model RC i RLC jako:
(
)
TD = max d LC ,0.377 RCd 2 + 0.639 Rs Cd + 0.639C0 (Rd + 0.65 Rs + 0.36Z 0 )
(2.33)
oraz na odpowiedź na sygnał zbocze narastające:
Rd
R
TD = max d LC + 0.15
Tr ,0.377 RCd 2 + 0.693Rs Cd + 0.251 + s Tr +
Z0
Z0
+ 0.639C0 (Rd + 0.65 Rs + 0.36 Z 0 )
(2.34)
W [41] rozważany jest model połączenia z parametrami rozproszonymi RLC, w celu
uzyskania efektywnej metody estymacji opóźnienia odpowiedzi skokowej połączenia. Do
transmitancji stratnej linii transmisyjnej obciążonej pojemnością i zasilanej źródłem z
niezerową wartością rezystancji wprowadzono skalowanie, tak aby wartość tej transmitancji
zależała tylko od trzech zmiennych bezwymiarowych:
ζ = ζ line
RT + CT + RT CT + 0.5
R
C
, RT = w , CT = 0 ,
Rt
Ct
1 + CT
(2.35)
ζ line =
Rt
2
Ct
, ωn =
Lt
1
,
Lt (Ct + C0 )
zależnych od parametrów połączenia i przedstawiono ją, jako szereg zmodyfikowanej
zmiennej zespolonej s’.
39
Połączenia o dużej wartości indukcyjności
Odpowiedź skokowa będzie wtedy również funkcją tych trzech zmiennych, a czas opóźnienia
może zostać wyznaczony na podstawie równania:
Vout (t ' pd , ζ , RT , CT ) = 0.5
(2.36)
Gdzie t' pd jest skalowanym czasem opóźnienia i ma wartość bezwymiarową. Ostatecznie czas
opóźnienia modelu linii RCL będzie miał wartość:
t pd =
t ' pd
ωn
(2.37)
Ta sama wartość skalowanego czasu opóźnienia może występować dla różnych parametrów
linii transmisyjnej zasilanych skokiem jednostkowym ze źródła z rezystancją wewnętrzną i
obciążonych pojemnością. Wartość t' pd pozostaje stała tak długo, jak długo nie zmieniają się
wartości stałych ζ , RT , CT . Autorzy, korzystając z tej właściwości, przeprowadzili szereg
symulacji dla różnych parametrów połączeń dla zakresu zmian 0 < ζ < 2 ,
0 < RT < 5 ,
0 < CT < 5 . Wartość t' pd w bardzo niewielkim stopniu zależy od RT i C T . Dlatego dla
zakresu 0 < RT < 1 , 0 < CT < 1 , który odpowiada parametrom długich połączeń globalnych
wyższych warstw, autorzy rozważali t' pd jako zależność jednej zmiennej ζ . W celu
uzyskania zależności pozwalającej na obliczanie czasu 50-procentowego opóźnienia,
przeprowadzono szereg symulacji dla różnych parametrów i wykorzystując metodę
dopasowania krzywej otrzymano eksperymentalną zależność:
T50% =
e −2.9ζ
1.35
+ 1.48ζ
ωn
(2.38)
W omawianym artykule przedstawiono szereg wyników dla różnych parametrów połączenia
oraz porównanie uzyskanych wyników z analizą pomijającą wpływ indukcyjności.
Przedstawiona powyżej metoda daje dobre rezultaty dla szerokiego zakresu parametrów i
pozwala na efektywne obliczanie czasu przejścia przez próg. Jest jednak metodą
heurystyczną, a wyprowadzona zależność (2.38), zależy od parametrów połączeń w
przeprowadzonych wcześniej symulacjach. Można też znaleźć wartości parametrów,
znajdujące się wewnątrz podanego zakresu stosowalności, które generują nieakceptowalne
błędy. Zaletą metody jest jej prostota oraz fakt, że dla L=0 wzór upraszcza się do znanego w
literaturze [14] od dawna wzoru na 50-procentowe opóźnienie:
40
Połączenia o dużej wartości indukcyjności
T50% RC = 0.74Rt Ct (RT + CT + RT CT + 0.5)
(2.39)
Wyniki uzyskane z zależności (2.38) zostaną przedstawione szerzej w rozdziale 4, jako
porównanie dla wyników uzyskanych w tej pracy.
Rys. 2.16. Czas przejścia przez próg 50% dla odpowiedzi skokowej połączenia o parametrach: R=76Ω,
L=5.3nH/cm, C=2.6pF/cm, Zdrv=50Ω, CT=0.385, RT=0.658, ς=1.284. TIsm oznacza czas przejścia przez
próg wyznaczony z zależności (2.38)
Do obliczenie czasu przejścia przez próg 50% odpowiedzi na skok jednostkowy, można
wykorzystać znaną z teorii linii transmisyjnych [55] zależność:
1
U 2 ( s) = H ( s ) ,
s
(2.40)
gdzie
H (s) =
Z 0 ( s)
(1 + ρ o ( s)) exp(−γ (s)d ) ,
⋅
Z 0 ( s ) + Rw 1 − ρ o ( s ) ρ w ( s ) xp (−2γ ( s )d )
(2.41)
ρw(s), ρo(s) – współczynniki odbicia, określone wcześniej we wzorze (2.3),
γ(s) – współczynnik propagacji.
Obliczając czas opóźnienia, będący sumą czasu opóźnienia T i pewnego czasu narastania,
można powyższą zależność uprościć do:
41
Połączenia o dużej wartości indukcyjności
H 0 (s) =
Z 0 (s)
Z 0 ( s ) + Rw
(1 + ρ o (s) ) exp(−γ ( s)d ) ,
(2.42)
zależność (2.42) odpowiada (2.41) w czasie 0<t<3T, co jest wystarczające do obliczenia T50%.
Podobnie jak w pracy Ismail'a, Friedman'a [41] zostanie wprowadzona skalowana
częstotliwość zespolona p = s/ωn oraz parametry RT, CT, ζline:
−p
2e
U20 ( p) =
gdzie F ( p) = 1 +
1+CT
p
exp −
(
F( p) −1)
1+ C
T
2R C ζ
CT
2R ζ
p1+ p T T line + pF( p)
+ T line
F( p)
1+ CT
1+ CT
2ζ line 1 + CT
p
,
(2.43)
.
Rozwijając (2.43) w szereg otrzymamy:
U 2a ( p) = e
−p
1+ CT
(2.44)
1
1
1
a0 + a1 p + a2 p 2 + a3 p 3 K ,
kolejne stałe, będące n-tymi momentami funkcji U 20 ( p) [55] przyjmą wartości:
an =
1 d nU 2 a ( z )
n! d z n z =0
z=
1
.
p
(2.45)
Po obliczeniu odwrotnej transformaty Laplace’a dla (2.44) otrzymamy dla n=4 pierwszych
wyrazów:
1
u2a (τ ) = 2a2 τ −
1+ CT
a3
+ τ − 1
2
1+ CT
2
a4
+ τ − 1
6
1+ CT
3
.
(2.46)
przyrównując otrzymaną wartość do progu 50%:
0.5 = u2a (τ ) ,
możemy wyznaczyć czas przejścia przez próg jako:
42
(2.47)
Połączenia o dużej wartości indukcyjności
τ dn +
Tan50% =
gdzie τ
n
d
1
1 + CT
ωn
,
(2.48)
jest rozwiązaniem równania (2.46), do trzeciego rzędu wyznaczalnego analitycznie,
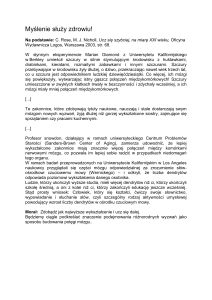
powyżej tylko numerycznie. Na wykresie (Rys.
(
2.17)) pokazano przebieg sygnału dla
przykładowych parametrów i porównanie wyników uzyskanych metodami przedstawionymi
powyżej (2.48) oraz (2.38)..
Rys. 2.17. Napięcie
cie na pojemności
pojemnoś C0, parametry: RT=0.5, CT=0.01, R=1=25 Ω,, k=0.01, Rw=12.5 Ω, ζ=0.282,
Ta50%=44.96ps, T50%=45.34ps,
=45.34 T1/2=45ps (czas T1/2 jest czasem otrzymanym z symulacji w programie
PSpice)
Poniżej zamieszczono tabelę (Tabela 2.3) przedstawiającą wartości błędu dla metod (2.48)
oraz (2.38). Wartości błędów zostały obliczone wg zależności:
δ Ta 50% =
δ T 50% =
T1 / 2 − Ta50%
,
T1 / 2
(2.49)
T1 / 2 − T50%
.
T1 / 2
(2.50)
Zzaznaczono
zaznaczono wyniki o mniejszym błędzie porównując metody. We wzorze
wzorz (2.48)
zmniejszenie błędu jest możliwe poprzez zwiększenie liczby momentów. Obliczanie
odpowiedzi na podstawie większej liczby momentów jest jednak mało efektywne, a
analityczne wyznaczanie czasu na podstawie odpowiedzi z większą liczb
czbą wyrazów nie jest
możliwe.
43
Połączenia o dużej wartości indukcyjności
RW [Ω]
12,5
12,5
12,5
25
25
25
25
25
25
25
25
25
25
50
50
CT
0,1
0,5
1
0,01
0,01
0,01
0,02
0,05
0,1
0,1
0,5
0,5
1
0,1
0,1
RT
0,5
0,5
0,5
0,1
0,5
1
0,01
0,5
0,1
0,5
0,1
0,5
0,5
0,5
2
Tabela 2.3 Wyniki symulacji
Rt [Ω]
25
25
25
250
50
25
2500
50
250
50
250
50
50
100
25
T50% [ps]
46
56,5
70
115
45
45
993
47
134
48,5
308
70
98
83
50
δTa50%
2,89
2,91
2,533
60
0,463
1,48
1,2
0,308
60,6
2,1
69
3,97
10,7
37
14,1
δT50%
2,92
0,8
5,114
2
9,59
2,83
86,6
8,409
1,9
9,26
2,11
1,595
1,87
3,1
16,9
Przedstawione powyżej rozwiązania pozwalają na obliczanie czasów przejścia przez progi
napięciowe. Wraz ze wzrostem szybkości układów scalonych konieczne jest jednak
opracowywanie nowych, bardziej efektywnych i dokładniejszych metod, szczególnie dla
połączeń małostratnych, o znacznej indukcyjności, dla których modele nie uwzględniające
dużych wartości indukcyjności są niewystarczające. W kolejnych rozdziałach zaprezentowana
zostanie autorska propozycja wyznaczania odpowiedzi skokowej oraz na zbocze narastające
dla połączeń o znacznej indukcyjności z wykorzystaniem metody wielu skal. Na podstawie
odpowiedzi połączenia zostanie wyznaczony czas przejścia przez próg napięciowy.
Zaprezentowana zostanie też analiza wrażliwościowa otrzymanych zależności.
44
Propagacja sygnału w połączeniach układów VLSI
3. Propagacja sygnału w połączeniach układów VLSI
Połączenia w nowoczesnych układach scalonych, jak już wcześniej wspomniano,
charakteryzuje znaczny pasożytniczy wpływ na czas i kształt sygnału pomiędzy bramką
źródłową, a bramką odbiorczą. Dodatkowo można zauważyć znaczący wpływ jednego
połączenia na propagację sygnału w innym połączeniu. Dlatego modelowanie i symulacja
połączeń jest bardzo ważnym elementem projektowania układów scalonych. Zastosowanie
odpowiednich modeli połączeń, a następnie odpowiednich metod symulacji nastręcza
inżynierom wielu problemów, związanych w szczególności z ogromną ilością połączeń,
znajdujących się w układach najnowocześniejszych generacji.
3.1. Obliczanie odpowiedzi pojedynczego połączenia
W praktyce inżyniersko-konstruktorskiej często pierwszym podejściem do projektowania jest
wstępne oszacowanie, czy dane połączenie będzie spełniało wymagania przyjęte w projekcie.
W tym celu, opracowuje się metody umożliwiające proste obliczanie podstawowych
parametrów czasowych, takich jak czas opóźnienia, czas narastania, czas przejścia przez
dowolny próg napięcia oraz wartości maksymalnej sygnału, a także parametrów związanych z
przenikami sygnału do połączeń sąsiednich. Parametry te można obliczyć znając odpowiedź
45
Propagacja sygnału w połączeniach układów VLSI
połączenia na zadane wymuszenie. Do tego typu zastosowań stosuje się układ obejmujący
pojedyncze połączenie, lub kilka połączeń sprzężonych. W starszych układach scalonych,
o mniejszych szybkościach przesyłu danych i większych rezystywnościach ścieżek oraz
w nowoczesnych połączeniach, przy bardzo krótkich połączeniach, wystarcza modelowanie
połączenia za pomocą modelu linii transmisyjnej RC. Dla dłuższych połączeń (globalnych
i pośrednich), konieczne jest jednak uwzględnienie wpływu indukcyjności połączeń,
w związku z czym niezbędne jest modelowanie połączenia linią transmisyjną RLC (Rozdział
2.2). Model pojedynczego połączenia z uwzględnieniem bramek wejściowej i wyjściowej,
modelowanych kolejno przez źródło z rezystancją wyjściową dla bramki zasilającej oraz
pojemność wejściową dla bramki odbiorczej, przedstawiono na Rys. 2.9. Modelowanie za
pomocą linii transmisyjnej umożliwia zastosowanie do obliczania odpowiedzi połączenia
równań telegrafistów. W przypadku analizy pojedynczego połączenia, przy założeniu
zerowych warunków początkowych (3.2), układ równań będzie zawierał układ dwóch równań
różniczkowych (3.1) oraz dwa równania (3.3), określające warunki brzegowe na początku i
końcu połączenia, związane z parametrami bramek. Wprowadzenie równań (3.1) – (3.3)
znajduje się w rozdziale (2.3.2)
∂i
∂v
− ∂x = Ri + L ∂t ,
− ∂i = C ∂v ,
∂x
∂t
(3.1)
i ( x , 0 ) = 0, v ( x , 0 ) = 0,
(3.2)
e(t ) − R s i (0, t ) = v (0, t ),
i(d , t ) = C 0
∂v ( d , t )
,
∂t
(3.3)
gdzie
R, L, C – parametry linii, C0 – pojemność wejściowa bramki, Rw – rezystancja wyjściowa
bramki, i(x,t), v(x,t) – prąd i napięcie w linii, d – długość połączenia, t, x – zmienne czasu i
zmienne przestrzenne.
Układu równań przedstawionego powyżej nie da się rozwiązać, stosując dokładne metody
analizy matematycznej. W literaturze można spotkać różne podejścia do analizy połączenia
modelowanego przez linię transmisyjną RLC, bazujące zarówno na analitycznym obliczaniu
46
Propagacja sygnału w połączeniach układów VLSI
odpowiedzi układu (3.1), jak i na heurystycznym wyznaczaniu odpowiedzi na podstawie
symulacji połączeń, o parametrach podobnych do analizowanego połączenia. Przykładowe
podejścia stosowane w literaturze przedstawiono w rozdziale 2.3.3.
Przedstawiona poniżej autorska propozycja opiera się na przybliżonym rozwiązaniu układu
równań (3.1), wykorzystując metodę wielu skal (ang. Multiple-Scales Method). Metoda wielu
skal jest nazywana w polskiej literaturze [83] również metodą wielu skali i należy do klasy
metod perturbacyjnych.
Metody perturbacyjne pozwalają na rozwiązanie pewnych klas równań różniczkowych, dla
których można przyjąć założenie, że jeden ze składników równania można potraktować jako
zaburzenie, czyli że jego wartość jest stosunkowo mała w porównaniu do innych elementów
równania.
Dla
wielu
równań
nieposiadających
rozwiązań
analitycznych,
metody
perturbacyjne dają bardzo dobre rezultaty. W wyniku metody perturbacji, zmienia się
dynamiczny rząd układu, jako rezultat pominięcia niektórych elementów, lub też wykonania
kilku upraszczających założeń [94]. Układ równań wyjściowych jest nazywany układem
pełnowymiarowym,
nieuproszczonym
albo
oryginalnym,
natomiast
powstały
po
uproszczeniach, układem zredukowanym albo uproszczonym. W wyniku obliczania układu
zredukowanego otrzymuje się rozwiązanie przybliżone. W zależności od dokładności z jaką
oblicza się dany układ, można wprowadzić rozwinięcie funkcji rozwiązania do określonego
rzędu. Metoda ta jest szczególnie przydatna w układach, gdzie klasyczne metody
perturbacyjne zawodzą, ze względu na wzbudzanie się rezonansów, wynikających z istnienia
tzw. wyrazów sekularnych (ang. secular terms). Wyrazy sekularne, powodujące
występowanie członów narastających, mogą pojawić się w zredukowanym układzie, na
skutek uproszczeń, nawet jeśli rozwiązanie oryginalnego układu jest ograniczone.
W związku z tym, że praca obejmuje badania nad połączeniami górnych warstw
nowoczesnych układów scalonych, cechujących się dużą wartością indukcyjności i małymi
stratami (rozdział 2.2) przyjmuję, że wartość rezystancji R jest mała, w stosunku do
impedancji linii bezstratnej.
Układ (3.1) można przeskalować do postaci:
47
Propagacja sygnału w połączeniach układów VLSI
∂v~
∂i
,
= εi +
∂y
∂τ
∂i ∂v~
.
−
=
∂y ∂τ
−
(3.4)
Z warunkami brzegowymi:
~
e (τ ) − β i (0,τ ) = v~ (0,τ ),
1 ∂v~ (1,τ )
i (1,τ ) =
.
α ∂τ
(3.5)
W przekształceniu zastosowano następujące zależności skalujące:
y=
x
,τ=
d
Ct ~
Ct
Ct
C
v, e =
e, β =
Rs , α = t .
, v~ =
Lt
Lt
Lt
C0
Lt C t
t
(3.6)
Jest to równoznaczne z wprowadzeniem znormalizowanego czasu i przestrzeni (w pierwszym
przypadku dokonane poprzez podzielenie przez czas opóźnienia, po którym sygnał dotrze do
końca linii, w drugim przez długość połączenia). Dodatkowo dokonano skalowania zmiennej
napięciowej, SEM wymuszającej oraz wartości rezystancji wejściowej (rezystancji
wyjściowej bramki zasilającej) przez impedancję charakterystyczną linii bezstratnej (parametr
ten jest w dalszej części pracy oznaczany jako Z0 ). Wartość pojemności wyjściowej została
przeskalowana względem pojemności linii. Wynikiem skalowania jest przedstawienie
pojemności obciążenia i rezystancji źródła w postaci bezwymiarowej, a zmiennych
napięciowej i prądowej w Amperach.
Wprowadzając do równań (3.1) parametr
ε=
Ct
R
Rt = t < 1 ,
Lt
Z0
(3.7)
( Rt = R ⋅ d , Ct = C ⋅ d , Lt = L ⋅ d ),
który wskazuje na wartość strat w stosunku do impedancji charakterystycznej linii bezstratnej,
a w przypadku połączeń małostratnych będzie przyjmował małe wartości, możemy zauważyć,
że powstałe równanie (3.4), można traktować jako równanie różniczkowe z małym
48
Propagacja sygnału w połączeniach układów VLSI
parametrem ε . Takie przekształcenie układu (3.1) umożliwia więc zastosowanie do
rozwiązania równań linii transmisyjnej małostratnej, metod analizy perturbacyjnej. W
przypadku klasycznych metod perturbacyjnych, wprowadza się rozwinięcie funkcji
rozwiązania w względem małego parametru:
v~ ( y,τ ) = v~0 ( y,τ ) + ε ⋅ v~1 ( y,τ ) + ε 2 ⋅ v~2 ( y,τ ) + ... + ε n ⋅ v~n ( y,τ ),
i( y,τ ) = i0 ( y,τ ) + ε ⋅ i1 ( y,τ ) + ε 2 ⋅ i2 ( y,τ ) + ... + ε n ⋅ in ( y,τ ).
(3.8)
Rozwiązując równania metodami perturbacyjnymi ogranicza się tylko do kilku pierwszych
wyrazów, czyli z dokładnością O( ε n ). Często rozwiązanie ogranicza się tylko do rzędu O( ε ).
Wtedy po odcięciu wyrazów wyższych rzędów mamy:
v~ ( y,τ ) = v~0 ( y,τ ) + ε ⋅ v~1 ( y,τ ),
i ( y,τ ) = i0 ( y,τ ) + ε ⋅ i1 ( y,τ ),
(3.9)
a układ równań (3.1) przyjmie postać:
∂ (v~0 ( y,τ ) + ε ⋅ v~1 ( y,τ ) )
∂ (i ( y,τ ) + ε ⋅ i1 ( y,τ ) )
= ε ⋅ (i0 ( y,τ ) + ε ⋅ i1 ( y,τ ) ) + 0
,
∂y
∂τ
∂ (i ( y,τ ) + ε ⋅ i1 ( y,τ ) ) ∂ (v~0 ( y,τ ) + ε ⋅ v~1 ( y,τ ) )
− 0
=
.
∂y
∂τ
−
(3.10)
Porównując wyrazy przy takich samych potęgach ε , układ ten można zapisać jako dwa
niezależne układy równań dla kolejnych rzędów rozwinięcia ε :
O(1)
−
∂v~0 ( y, τ ) ∂i0 ( y,τ )
=
,
∂y
∂τ
∂i ( y ,τ ) ∂v~0 ( y,τ )
− 0
=
,
∂y
∂τ
(3.11)
e~ (τ ) − β ⋅ i0 (0,τ ) = v~0 (0,τ ),
∂v~ (1,τ )
α ⋅ i0 (1,τ ) = 0
,
∂τ
(3.12)
49
Propagacja sygnału w połączeniach układów VLSI
O( ε )
∂ v~1 ( y , τ )
∂i ( y ,τ )
= i0 ( y , τ ) + 1
,
∂τ
∂y
∂ i ( y , τ ) ∂ v~1 ( y , τ )
− 1
=
,
∂y
∂τ
−
− β ⋅ i1 (0,τ ) = v~1 (0,τ ),
∂v~ (1,τ )
α ⋅ i1 (1,τ ) = 1
,
∂τ
(3.13)
(3.14)
W układzie (3.11) – (3.14) w rozwiązaniu pierwszego rzędu O( ε ) pojawią się wyrazy
sekularne, powodujące w pewnych sytuacjach (dla dużych czasów), liniowe narastanie
sygnału i brak stabilności, nie pojawiające się w oryginalnym układzie. Wyrażenia sekularne
są wynikiem występowania w układzie pierwszego rzędu (3.13) wyrażenia i0 ( y,τ ) , w którym
występują te same częstotliwości własne, co w rozwiązaniu pierwszego rzędu.
W pracy zastosowano metodę skal wielokrotnych, która poprzez wprowadzenie dodatkowych
zmiennych niezależnych (tzw. zmiennych skalowanych, lub krótko skal) pozwala
wyeliminować problem występowania wyrazów sekularnych. W równaniach różniczkowych
z warunkami początkowymi, stosuje się skalowanie zmiennej czasu [86]. Rozważany przeze
mnie problem, jest jednak zagadnieniem brzegowym, dlatego zastosowałam rozwinięcie skali
zmiennej przestrzennej. Rozwinięcie to przyjmie postać:
y0 = y ,
y1 = ε ⋅ y ,
y 2 = ε 2 ⋅ y , ... y n = ε n ⋅ y .
(3.15)
Ograniczenie metody do aproksymacji drugiego rzędu wymaga wprowadzenia tylko dwóch
zmiennych:
y0 = y ,
y1 = ε ⋅ y ,
(3.16)
Ponieważ zmienna czasu jest w postaci niezmienionej można przekształcić układ równań
(3.1) do postaci operatorowej:
50
Propagacja sygnału w połączeniach układów VLSI
~
∂V ( y, p )
= εI ( y, p ) + pI ( y, p ),
∂y
∂I ( y, p )
~
−
= pV ( y, p ),
∂y
−
~
~
E ( p) − βI (0, p) = V (0, p),
~
αI (1, p) = pV (1, p).
(3.17)
(3.18)
Zmienna p oznacza w tym przypadku znormalizowaną zmienną zespoloną:
p=
s
.
Lt Ct
(3.19)
Normalizacja wynika z wprowadzenia bezwymiarowej zmiennej czasu. Wprowadzenie
zmiennych (3.16) do układu równań (3.17) – (3.18), przy uwzględnieniu zasady
różniczkowania postaci:
∂ / ∂y = ∂ / ∂y0 + ε ⋅ ∂ / ∂y1
(3.20)
prowadzi do uzyskania dwóch układów równań postaci:
O(1)
~
∂V0 ( y0 , y1, p )
−
= pI 0 ( y0 , y1 , p ),
∂y0
∂I ( y , y , p )
~
− 0 0 1
= pV0 ( y0 , y1 , p )
∂y0
~
~
E ( p) − βI 0 (0,0, p) = V0 (0,0, p),
~
αI 0 (1, ε , p) = pV0 (1, ε , p),
(3.21)
(3.22)
O( ε )
~
~
∂V1 ( y0 , y1 , p )
∂V0 ( y0 , y1, p )
−
= p ⋅ I1 ( y0 , y1 , p ) + I 0 ( y0 , y1 , p ) +
,
∂y0
∂y1
∂I ( y , y , p )
∂I ( y , y , p )
~
− 1 0 1
= p ⋅ V1 ( y0 , y1, p ) + 0 0 1
∂y0
∂y1
(3.23)
51
Propagacja sygnału w połączeniach układów VLSI
~
− β ⋅ I1 (0,0, p) = V1 (0,0, p),
~
α ⋅ I1 (1, ε , p) = s ⋅ V1 (1, ε , p).
(3.24)
W powyższych układach równań, równania (3.22) i (3.24) stanowią warunki brzegowe,
określające sposób zasilania na początku i obciążenie na końcu rozważanego połączenia.
Rozwiązanie układu (3.21) z uwzględnieniem warunków brzegowych (3.22), względem
zmiennych y0 , p , jest znanym rozwiązaniem linii transmisyjnej bezstratnej, zasilanej
źródłem z rezystancją wewnętrzną, a obciążonej kondensatorem. Uwzględnienie zależności
od y1 , wymaga ustalenia rozwiązań ogólnych dla układu (3.23) - (3.24) oraz skonstruowania
na tej podstawie warunków sekularnych. Rozwiązania ogólne na równania zerowego rzędu
(3.21), przyjmują zgodnie z teorią linii transmisyjnych [71] postać:
~
V0 = A00 ( y1 , p)e− py0 + A01 ( y1 , p)e py0 ,
I 0 = A00 ( y1 , p )e − py0 − A01 ( y1 , p )e py0 ,
(3.25)
gdzie A00 i A01 są stałymi zależnymi od zmiennych y1 i p. Zależność od y1 zostanie
wyznaczona z warunków sekularnych [9]. W równaniach pierwszego rzędu występuje
wymuszenie w postaci prądu rzędu zerowego, co uniemożliwia wyznaczenie rozwiązania
ogólnego postaci (3.25). Rozwiązania ogólne zostaną ustalone na podstawie niezależnych
równań drugiego rzędu na prąd i napięcie. Poprzez obustronne zróżniczkowanie równania
(3.23) względem y0 powstaje układ równań:
~
~
∂ 2V1 ( y0 , y1 , p )
∂I1 ( y0 , y1 , p) ∂I 0 ( y0 , y1 , p) ∂ 2V0 ( y0 , y1 , p)
−
= p⋅
+
+
,
∂y02
∂y0
∂y0
∂y1∂y0
~
∂ 2 I1 ( y0 , y1 , p)
∂V1 ( y0 , y1 , p ) ∂ 2 I 0 ( y0 , y1 , p)
−
=
p
⋅
+
,
∂y02
∂y0
∂y1∂y0
(3.26)
z którego poprzez proste przekształcenia otrzymujemy równania różniczkowe drugiego rzędu
na prąd i napięcie, w których występują wymuszenia prądami i napięciami zerowego rzędu
(rozwiązania O(1)):
52
Propagacja sygnału w połączeniach układów VLSI
~
∂ 2V0
∂I
~ ∂I
− p 2V1 = 0 p −
− 0,
∂y1
∂y0 ∂y1 ∂y0
(3.27)
~
∂V0
∂2I0
− p I1 = pI 0 +
p−
.
∂y1
∂y0 ∂y1
∂y02
(3.28)
~
∂ 2V1
∂y02
∂ 2 I1
2
Rozwiązanie ogólne równań na prąd i napięcie przyjmie postać:
~
V1 = A10 ( y1 , p)e− py0 + A11( y1 , p)e py0 ,
(3.29)
I1 = A12 ( y1 , p )e − py0 + A13 ( y1 , p )e py0 ,
(3.30)
gdzie A10 , A11 , A12 i A13 są zależne od zmiennych y1 i p oraz muszą spełnić układ równań
przybliżenia pierwszego rzędu (3.23). W tym przypadku, da się wyprowadzić zależności
pomiędzy stałymi dla prądu i napięcia, jak w przypadku linii bezstratnej, wstawiając
wyrażenia (3.29) oraz (3.30) do układu (3.23). Rozwiązanie to zostanie przedstawione w
dalszej części rozdziału. W związku z tym, że w rozwiązaniach na przybliżenie pierwszego
rzędu, podobnie jak w rozwiązaniach zerowego rzędu pojawiają się te same częstotliwości
własne, a rozwiązania zerowego rzędu i ich pochodne stanowią wymuszenia w (3.29) oraz
(3.30), konieczne jest usunięcie wyrażeń zerowego rzędu o częstotliwościach własnych, jako
wyrazów sekularnych, w celu zapewnienia stabilności rozwiązania, względem zmiennej
przestrzennej [43]. W związku z tym, warunki sekularne można sformułować w następujący
sposób:
~
∂ 2V0 ∂I 0
∂I
−
p + 0 = 0,
∂y0∂y1 ∂y1
∂y0
(3.31)
~
∂V
1 ∂ 2 I0
− I 0 − 0 = 0.
p ∂y0 ∂y1
∂y1
(3.32)
Niezależnie od tego, który warunek sekularny zostanie wykorzystany do wyznaczenia
zależności funkcji prądu i napięcia w przybliżeniu zerowego rzędu od zmiennej y1 ,
rozwiązanie przyjmuje dokładnie taką samą postać. Oznacza to, że warunki (3.31) oraz (3.32)
53
Propagacja sygnału w połączeniach układów VLSI
są równoważne. W pracy zostanie wykorzystany warunek (3.31). Wstawiając ogólne
rozwiązania na prąd i napięcie zerowego rzędu (2.23) do (3.31), otrzymujemy:
−p
∂A00 ( y1 , p ) − py0
∂A ( y , p ) py0
e
+ p 01 1
e − pA00 ( y1 , p )e − py0 − pA01 ( y1 , p )e py0
∂y1
∂y1
∂A ( y , p ) − py0
∂A ( y , p ) py0
− p 00 1
e
+ p 01 1
e = 0.
∂y1
∂y1
(3.33)
Porównując wyrażenia przy tych samych potęgach funkcji wykładniczej, otrzymuje się dwa
niezależne równania różniczkowe na stałe A00 i A01 względem y1 :
2 A00' + A00 = 0,
'
2 A01
− A01 = 0,
(3.34)
(3.35)
∂Akj
gdzie Akj' =
.
∂y1
Powyższe równania (3.36) i (3.37) mają rozwiązania:
A00 ( y1 , p ) = B00 ( p )e −0.5 y1 ,
A01 ( y1 , p ) = B01 ( p )e 0.5 y1 ,
(3.36)
(3.37)
gdzie B00 i B01 są stałymi niezależnymi od zmiennych przestrzennych.
Po uwzględnieniu zależności (3.36) i (3.37) rozwiązania ogólne na prąd i napięcie
przybliżenia rzędu zerowego przyjmą postać:
(3.38)
I 0 = B00 e −0.5 y1 e − py0 − B01e 0.5 y1 e py0 ,
stałe B00 i B01 zostaną wyznaczone w dalszej części rozdziału.
54
(3.39)
Propagacja sygnału w połączeniach układów VLSI
3.1.1. Odpowiedź skokowa
W zagadnieniach modelowania i symulacji układów liniowych, bardzo ważnym aspektem
jest analiza przebiegów sygnałów. W praktyce inżynierskiej sygnały cyfrowe są
przedstawiane w postaci impulsów prostokątnych, co można zredukować do analizy
odpowiedzi na skok jednostkowy. Takie podejście znacznie ułatwia analizę, a przyjęcie czasu
narastania sygnału w bramce wejściowej, jako nieskończenie krótkiego, nie generuje w
układach modelowanych linią transmisyjną RC zbyt dużych błędów. W połączeniach o dużej
indukcyjności i małej rezystancji, kiedy czas narastania sygnału na wyjściu jest zazwyczaj
bardzo krótki, uwzględnienie czasu narastania sygnału wejściowego ma zdecydowanie
większe znaczenie. W pracy, odpowiedź na sygnał z czasem narastania różnym od zera,
zostanie obliczona na podstawie odpowiedzi skokowej. Dodatkowo odpowiedź skokowa
będzie traktowana jako pierwsze przybliżenie odpowiedzi układu i zostanie wykorzystana do
porównania prezentowanego rozwiązania z metodami stosowanymi w literaturze.
W celu obliczenia odpowiedzi skokowej przyjmujemy wymuszenie postaci:
e(t ) = E0 ⋅ 1(t ),
(3.40)
~
~
e (τ ) = E0 ⋅1(τ ),
(3.41)
~
E0
~
E ( p) =
,
p
(3.42)
czyli po przeskalowaniu:
w postaci operatorowej:
Stałe B00 i B01 zostaną obliczone z warunków brzegowych. Podstawiając równania (3.38) i
(3.39) do warunków brzegowych (3.22), otrzymuje się następujące zależności dla początku
(3.43) i dla końca (3.44) linii:
~
E ( p) − β (B00 − B01 ) = B00 + B01,
α ⋅ (B00 e −0.5ε e − p − B01e 0.5ε e p ) = p ⋅ (B00 e −0.5ε e − p + B01e 0.5ε e p ).
(3.43)
(3.44)
55
Propagacja sygnału w połączeniach układów VLSI
Rozwiązanie powyższego układu równań pozwala wyznaczyć stałe B00 i B01:
B00 ( p ) =
B01 ( p ) = −
~
E0
p ⋅ (β + 1) 1 −
~
E0
p ⋅ (β + 1)
1
p −α
p +α
e −ε e − 2 p
p −α − ε − 2 p
e e
p +α
p −α
1 − p +α e − ε e − 2 p
(3.45)
,
(3.46)
,
Po wstawieniu stałych B00 i B01 do rozwiązań ogólnych uzyskamy postać operatorową
przybliżenia zerowego rzędu na prąd i napięcie:
~
V0 =
I0 =
~
E0
p ⋅ (β + 1) 1 −
~
E0
p ⋅ (β + 1) 1 −
1
p −α
p +α
e −ε e − 2 p
1
p −α
p +α
−ε − 2 p
e e
− 0.5 y1 − py 0 p − α 0.5 y1 −ε p( y 0 − 2 )
e
,
e
⋅e
−
⋅e
p +α
(3.47)
− 0.5 y1 − py 0 p − α 0.5 y1 −ε p( y 0 − 2)
e
.
⋅e
+
⋅e
e
p +α
(3.48)
Rozwiązanie można zapisać w postaci sumy fal wędrownych:
~
V0 ( y0 , y1, p) =
=
∑( )
∞
~
p −α n −(ε n+0.5 y1 ) − p( 2n+ y0 )
E ⋅
e
p +α e
β +1
n =0
−
( )
+
( )
I 0 ( y0 , y1 , p ) =
=
( )
∞
~
p −α n − (ε n + 0.5 y1 ) − p ( 2n + y 0 )
E ⋅
e
p +α e
β +1
n = 0
∑
(3.49)
p −α n+1 −ε ( n+1)+0.5 y1 − p ( 2( n+1)− y0 )
e
e
,
p +α
p −α n +1 − ε ( n +1) + 0.5 y1 − p ( 2 ( n +1) − y 0 )
e
e
.
p +α
(3.50)
W celu analizy sygnału na wejściu bramki odbiorczej, rozważamy sygnał na końcu
połączenia, dla x = d , czyli dla y0 = 1, y1 = ε . Napięcie i prąd na końcu linii mają postać:
~
V0 =
56
~
E0
p ⋅ (β + 1) 1 −
p −α
p +α
1
2α −0.5ε1 − p
e
⋅e ,
−ε − 2 p
e e
p +α
(3.51)
Propagacja sygnału w połączeniach układów VLSI
I0 =
~
E0
p ⋅ (β + 1)
2 p −0.5ε
e
⋅ e− p
p +α
⋅
p −α
1 − p +α e − ε e − 2 p
.
(3.52)
Po rozpisaniu na fale wędrowne:
~
V0 (1, ε , p) =
I 0 ( y, p) =
( )
∞
~
p −α n −ε ( n + 0.5) − p ( 2 n +1)
E ⋅
e
p +α e
β +1
n = 0
∑
∑( )
∞
~
p −α n −ε ( n + 0.5) − p ( 2 n +1)
E ⋅
e
p +α e
β +1
n = 0
( )
( )
−
+
p −α n +1 − ε ( n + 0.5) − p ( 2 n +1)
e
e
,
p +α
p −α n +1 −ε ( n + 0.5) − p ( 2 n +1)
e
e
.
p +α
(3.53)
(3.54)
Analiza linii o znacznej indukcyjności i małych stratach, przedstawiona w rozdziale 2.3.2,
pozwala założyć, że sygnał na końcu połączenia osiągnie (a nawet przekroczy) wartość
sygnału ustalonego już w czasie trwania pierwszej fali wędrownej. W związku z tym
analizując odpowiedź sygnału dla pierwszej fali, będzie można wyznaczyć czasy przejścia
przez progi napięciowe. Wykorzystując ten efekt, rozważanie ograniczę do analizy pierwszej
fali wędrownej, która dotarła do obciążenia.
~
V01 =
I 01 =
~
E0
2α − 0.5ε − p
e
⋅e ,
p ⋅ (β + 1) p + α
~
E0
2 p − 0.5ε − p
e
⋅e .
p ⋅ (β + 1) p + α
⋅
(3.55)
(3.56)
Postać czasowa dla przybliżenia rzędu pierwszego, pierwszej fali wędrownej napięcia i prądu
przyjmą więc postać:
~
2 E0 ⋅ e −0.5ε
~
v01 (1, τ ) =
1 − e −α (τ −1) ⋅ 1(τ − 1) ,
β +1
(3.57)
~
E0 ⋅ e −0.5ε −α (τ −1)
i01(1,τ ) =
e
⋅ 1(τ − 1).
β +1
(3.58)
(
)
57
Propagacja sygnału w połączeniach układów VLSI
Po przeskalowaniu do oryginalnych zmiennych równań (3.57) i (3.58), otrzymamy:
2 E0 ⋅ e − 0.5ε
v01 (d , t ) =
β +1
α
1 − e − T (t −T ) ⋅ 1(t − T ),
α
E ⋅ e − 0.5ε − T (t −T )
i01 ( d , t ) = 0
e
⋅ 1(t − T ).
Z 0 ⋅ (β + 1)
(3.59)
(3.60)
Dla przedstawionych powyżej zależności można, podobnie jak w rozdziale 2.3.2 wyznaczyć
wartości graniczne:
2E0 ⋅ e −0.5ε
lim (v01(d , t ) ) =
,
t →∞
β +1
(3.61)
lim (i01 (d , t ) ) = 0,
(3.62)
t →∞
Dv101 ( d ,t )
2 E0 ⋅ e −0.5ε α
=
,
β +1 T
(3.63)
E0 ⋅ e −0.5ε α
.
Z 0 ⋅ (β + 1) T
(3.64)
Di101 (d , t ) = −
Zależności opisujące wartość ustaloną pierwszej fali wędrownej, przy wykładniczym
charakterze tej zależności pozwalają potwierdzić celowość rozważań jedynie pierwszej fali
wędrownej, w celu wyznaczenia wartości przejścia przez dowolny próg napięcia (0-100%
wartości E0 ), dla małostratnych połączeń o dużych wartościach indukcyjności.
Wykresy funkcji opisujących kształt przebiegu prądu i napięcia przedstawiono na Rys. 3.1
oraz Rys. 3.2.
58
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.1 Pierwsze przybliżenie przebiegu prądu na końcu połączenia małostratnego dla pierwszej fali wędrownej
(3.60) z zaznaczonymi wartościami granicznymi
Rys. 3.2 Pierwsze przybliżenie przebiegu napięcia na końcu połączenia małostratnego dla pierwszej fali
wędrownej (3.59) z zaznaczonymi wartościami granicznymi
Zależność (3.59) można uznać za pierwsze przybliżenie odpowiedzi skokowej dla połączeń
małostratnych. Poniżej, na Rys. 3.3 oraz Rys. 3.4 przedstawiono porównanie napięcia
obliczonego przy użyciu wzoru (3.59) oraz wyników uzyskanych w symulacji programem
PSpice. Porównanie pokazuje, że zastosowanie zerowego rzędu przybliżenia dla metody
wielu skal, daje dobre odwzorowanie odpowiedzi skokowej, szczególnie w przypadkach gdy
rezystancja jest mała. Dodatkowo przedstawiono także tabelę, zestawiającą maksymalny błąd
odpowiedzi skokowej w przedziale T<t<3T dla pewnego zestawu parametrów, typowego dla
linii o dużej indukcyjności. Parametry połączeń zostały zaczerpnięte z pracy [41]. Rys. 3.3
59
Propagacja sygnału w połączeniach układów VLSI
oraz Rys. 3.4 przedstawiają kolejno wykresy, dla których błąd w tabeli poniżej (Tabela 3.1)
jest największy i najmniejszy. Błąd przedstawiony w tabeli obliczono z zależności:
vSPICE ( d , ti ) − v01 ( d , ti )
100%
vSPICE ( d , ti )
δ 01 = max
(3.65)
gdzie vSPICE (d , ti ) - wartość napięcia otrzymanego w symulacji programu PSpice, ti - próbki
czasu z zakresu (T,3T). Przy obliczaniu błędów pomijano kilka początkowych próbek
wyników z PSpice, ze względu na to, że dla bardzo małych wartości napięcia (rzędu nV)
pojawiał się bardzo duży błąd (wynikający z dzielenia przez bardzo małe wartości napięcia),
który jest nieistotny z punktu widzenia symulacji. Dodatkowo trudno przewidzieć dokładność
symulacji w PSpice w pierwszych chwilach trwania napięcia na końcu połączenia dokładność procedur numerycznych zależy w dużym stopniu od długości kroku symulacji,
PSpice posługuje się zmiennym krokiem symulacji, który dla pierwszych kilku próbek może
nie zostać optymalnie dobrany. W tabeli zaznaczono zestawy parametrów dla których błąd
wynosi mniej niż 10%.
Rys. 3.3 Porównanie wyników uzyskanych dla (3.59) dla przykładowych parametrów z tabeli poniżej (Tabela
3.1) R=50Ω, Rw=25Ω, L=5nH, C=1pF, C0=0.1pF a-symulacja w programie PSpice, b - Pierwsze przybliżenie
przebiegu napięcia (3.59)
60
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.4 Porównanie wyników uzyskanych dla (3.59) dla przykładowych parametrów z tabeli poniżej (Tabela
3.1) R=25Ω, Rw=25Ω, L=10nH, C=1pF, C0=0.5pF a-symulacja w programie PSpice, b - Pierwsze przybliżenie
przebiegu napięcia (3.59)
Tabela 3.1 Maksymalny procentowy błąd odpowiedzi (3.59)
[%]
R=50Ω
L[nH]
(β)
2
(0.559)
5
(0.354)
8
(0.28)
10
(0.25)
C0[pF] (α)
R=25Ω
C0[pF] (α)
0.1
(10)
0.5
(5)
1
(1)
3,4
0.559
15,3
5,5
3,6
4,1
5,7
0.354
7,6
2,2
4,2
10,9
3,2
6,3
0.28
5,1
2,1
4,2
9
3,3
6,4
0.25
4,1
2,1
4,1
0.1
(10)
0.5
(5)
1
(1)
1.118
28,8
14,3
0.707
15,6
0.559
0.5
ε
ε
Aby zmniejszyć wartości błędów i uzyskać lepsze przybliżenie wartości rzeczywistej
odpowiedzi połączenia, można wykorzystać układ pierwszego rzędu przybliżenia i
wyprowadzić poprawkę do (3.59), korzystając z układu równań (3.23) - (3.24).
Uwzględniając występowanie wyrazów sekularnych, rozwiązania ogólne układu równań
(3.23) mają postać (3.29) i (3.30), a równania (3.27), (3.28) stają się równaniami
jednorodnymi. Aby ustalić zależności pomiędzy stałymi w równaniach dla prądu (3.29) i
napięcia (3.30), konieczne jest skorzystanie z układu równań pierwszego rzędu (3.23). Po
wstawieniu rozwiązań ogólnych (3.29) i (3.30) (jako prądy i napięcia zerowego rzędu dla
61
Propagacja sygnału w połączeniach układów VLSI
uproszczenia zapisu wstawiono również równania ogólne (3.25), ze znanymi, obliczonymi
wcześniej stałymi) do równań (3.23) otrzymamy układ równań postaci:
O( ε )
−
(
)
+ B00e
−
(
)
∂ A10e − py0 + A11e py0
= p ⋅ A12e − py0 + A13e py0 +
∂y0
− 0.5 y1 − py 0
(
e
)
− B01e
0.5 y1 py 0
e
(
)
∂ B00e − 0.5 y1 e − py0 + B01e 0.5 y1 e py0
+
,
∂y1
)
(3.67)
pA10e − py0 − pA11e py0 = pA12e − py0 + pA13e py0 + B00e −0.5 y1 e − py0 − B01e0.5 y1 e py0 +
(3.68)
(
) (
(3.66)
∂ A12 e − py 0 + A13e py 0
∂ B00 e −0.5 y1 e − py 0 − B01e 0.5 y1 e py 0
= p ⋅ A10 e − py 0 + A11e py 0 +
.
∂y 0
∂y1
Po zróżniczkowaniu:
− 0.5 B00e − 0.5 y1 e − py0 + 0.5B01e0.5 y1 e py0 ,
pA12e − py0 − pA13e py0 = pA10e − py0 + pA11e py0 +
− 0.5B00e − 0.5 y1 e − py0 − 0.5B01e0.5 y1 e py0 .
(3.69)
Porównanie stałych przy funkcjach wykładniczych e py0 oraz e − py0 wyznacza układ czterech
równań, z których można wyznaczyć zależność pomiędzy stałymi w równaniach na prąd i
napięcie:
pA10 = pA12 + B00 e −0.5 y1 − 0.5 B00 e −0.5 y1 ,
− pA11 = pA13 − B01e 0.5 y1 + 0.5 B01e 0.5 y1 ,
pA12 = pA10 − 0.5 B00 e −0.5 y1 ,
− pA13 = pA11 − 0.5 B01e 0.5 y1 .
(3.70)
(3.71)
(3.72)
(3.73)
Jako stałe wyznaczone z równań (3.70) – (3.73), wybrano stałe występujące w równaniu
prądowym. Pozwoli to zapisać równanie napięciowe, którego otrzymanie jest ostatecznym
celem obliczeń, w bardziej zwarty sposób, niż równanie prądowe.
62
Propagacja sygnału w połączeniach układów VLSI
Z równań (3.70) oraz (3.72) otrzymamy identyczną zależność na A12 :
(3.74)
A12 = A10 − 21p B00e −0.5 y1 ,
A z równań (3.71) oraz (3.73) na stałą A13
(
(3.75)
)
A13 = − A11 − 21p B01e0.5 y1 .
Ostatecznie rozwiązania ogólne na prąd i napięcie, uwzględniające zależności pomiędzy tymi
zmiennymi przyjmą postać:
(3.76)
~
V1 = A10 e − py 0 + A11e py 0 ,
(
)
(
(3.77)
)
I1 = A10 − 21p B00e − 0.5 y1 e − py 0 − A11 − 21p B01e 0.5 y1 e py0 .
Podstawiając równania (3.76) i (3.77) do warunków brzegowych (3.24) otrzymamy
zależności, z których można obliczyć stałe A10 oraz A11 :
((
) (
)e
e
))
(3.78)
− β ⋅ A10 − 21p B00 − A11 − 21p B01 = A10 + A11 ,
α ⋅ ((A10 − 21p B00
−0.5ε
−p
(
) )
− A11 − 21p B01e 0.5ε e p = s ⋅ (A10 e − p + A11e p ).
Ostatecznie po rozwiązaniu powyższego układu równań stałe w przybliżeniu pierwszego
rzędu przyjmą postać:
A10 =
A11 = −
B00
β −1 p −α − 2 p
e
p +α
1 + β +1
B00
1+
β −1 p −α − 2 p
e
β +1 p +α
β 1 β
β +1 2 p + β +1
p −α 1 −ε
e
p +α 2 p
α
β
− 0.5ε
+ β +1
( p +α )2 e
β −1
− β +1
p −α 1 − 2 p
e
p +α 2 p
α
e− 0.5ε
( p +α )2
β
+ β +1
( p −α )2
( p +α )2
(3.79)
e− 2 p ,
1 e −ε e − 4 p .
2p
(3.80)
Podobnie jak w przypadku przybliżenia zerowego rzędu, w pracy podane zostanie jedynie
napięcie i prąd na końcu linii. Po podstawieniu stałych (3.79) i (3.80) do równań (3.76) oraz
(3.77) i uwzględnieniu y0 = 1, y1 = ε , otrzymamy:
63
Propagacja sygnału w połączeniach układów VLSI
~
V1 (1, ε , p ) =
B00
1+
β −1 p −α
β +1 p + α
e
−2 p
+ β +1
( p + α )2
p −α
β
I1 (1, ε , p) =
p
β −1
e −ε − β +1
α
( p + α )2
β α 1
β +1 p p +α
e − p +
(3.81)
e − 0.5ε e − 3 p ,
α
β
− 0.5ε
+ β +1 p +1α e − p +
( p +α )2 e
+ β p −α e −ε − β −1 α e − 0.5ε e − 3 p
β +1 ( p +α )2
β +1 ( p +α )2
B00
1+
α
− 0.5ε
α
+
− ( p +α )2 e
β −1 p −α − 2 p
e
β +1 p +α
− 21p B00e − 0.5ε e − p + 21p B01e 0.5ε e p .
(3.82)
Dodatkowo uwzględniając zależność na B00 (3.45)oraz B01 (3.46), otrzymamy:
~
V1 =
~
E0
1
p ⋅ (β + 1) 1 −
p −α
p +α
−ε − 2 p
e e
1+
− β +1
e −ε +
2
α
p
+
(
)
β
I1 =
~
E0
p ⋅ (β + 1) 1 −
p −α
β −1 α
β +1 ( p +α )2
1
p −α
p +α
− 0.5ε
α
+
− ( p +α )2 e
1
β −1 p −α
β +1 p +α
e
−2 p
e e
1+
e − p +
e − 0.5ε e − 3 p ,
β
β +1
1
−ε − 2 p
β α 1
β +1 p p +α
β −1 p −α
β +1 p +α
e
−2 p
1
p +α
−
p
( p +α )2
e − 0.5ε e − p +
p −α
β
β −1
+ β +1
e − ε − β +1 α 2 e − 0.5ε e − 3 p .
2
( p +α )
( p +α )
(3.83)
(3.84)
Traktując wyrażenia na prąd i napięcie pierwszego rzędu przybliżenia, jako sumę szeregu
geometrycznego, pierwszy wyraz szeregu dla napięcia będzie miał wartość:
a1 V~ =
1
~
E0
−α
2
p ⋅(β +1)
( p +α )
e − 0.5ε +
β α 1
β +1 p p + α
e − p −
((
β p −α ) α − ε
e
β +1 p
+
β −1
α e − 0.5ε
β +1
)(
e −3 p
p + α )2
(3.85)
oraz dla prądu:
a1 I1 =
~
E0
β 1
p ⋅( β +1)
β +1 p + α
−
(
β ( p −α )
e − 0.5ε e − p + β +1 e −ε −
( p +α )
p
2
β −1
α e − 0.5ε
β +1
)(
e −3 p
.
p + α )2
(3.86)
Natomiast ilorazem szeregu będzie, zarówno dla prądu, jak i dla napięcia, wyrażenie:
q12 =
64
p −α
p +α
e −ε e − 2 p −
β −1 p −α
β +1 p + α
e−2 p −
( )
β −1 p −α 2 − ε − 4 p
e e
.
β +1 p + α
(3.87)
Propagacja sygnału w połączeniach układów VLSI
Po rozłożeniu powyższych wzorów na fale wędrowne, otrzymamy nieskończony szereg
wartości odbitych napięć i prądów:
(3.88)
∞
a1V~
~
n
1
V1 =
= ∑ a1V~ ⋅q12
,
1 − q12 n = 0 1
I1 =
a1 I 1
1 − q12
=
∞
∑ a1 I
n=0
1
(3.89)
n
⋅q12
.
Obliczając, podobnie jak poprzednio, wyrażenie na pierwszą falę wędrowną, rozważany jest
tylko wyraz sumy dla n = 0 , ponieważ każde następne składniki zawierają opóźnienia
większe niż 2T, co w połączeniu z opóźnieniami zawartymi w wyrażeniach a1 V~ i a1 I1 , daje
1
opóźnienie 3T.
Ostatecznie pierwsza fala wędrowna dla napięcia i prądu dla przybliżenia pierwszego rzędu
na końcu połączenia ( y0 = 1, y1 = ε ):
~
E0α β 1
1
1
1
~
V11 (1, ε , p ) =
−
e − 0.5ε
2
(β + 1) β + 1 p p + α p ( p + α )2
~
E0α β 1 1
1
I11 (1, ε , p ) =
−
e − 0.5ε
2
(β + 1) β + 1 p p + α ( p + α )
(3.90)
−p
e ,
(3.91)
−p
e .
Przechodząc na postać czasową:
~
E
v~11 (1, ε ,τ ) = (β +01)
[
β
β +1
]
(τ − 1) + (τ − 1)e − 0.5ε e −α (τ −1) − α1 (ββ+1 + e − 0.5ε )(1 − e −α (τ −1) ) ,
~
E
i11 (1, ε ,τ ) = (β +01)
[
β 1
β +1 α
(1 − e α (τ ) )−(τ − 1)e
−
−1
− 0.5ε −α (τ −1)
e
(3.92)
(3.93)
].
Po przeskalowaniu do zmiennych t i x otrzymuje się:
E
−α t −T
β
v11 ( d , t ) = (β +01) β +1 t −TT + t −TT e − 0.5ε e T − α1
(
β
+ e − 0.5ε
β +1
)1 − e
−α t −TT
,
(3.94)
65
Propagacja sygnału w połączeniach układów VLSI
i11 ( d , t ) =
E0
β 1
Z 0 ⋅(β +1)
β +1 α
1 − e −α t −TT
(3.95)
− t −T e − 0.5ε e −α t −TT .
T
Po uwzględnieniu przybliżenia drugiego rzędu otrzymamy ostateczną zależność na napięcie i
prąd:
vs ( d , t ) = v01 ( d , t ) + ε v11 ( d , t ) =
=
E0
ε
β +1
⋅ e − 0.5ε
t −T
T
e
−α t −TT
−
((
ε
α
)
− 2 e − 0.5ε +
β ε
β +1 α
)⋅ 1 − e
−α t −TT
+ ε
β t −T
β +1 T
⋅ 1(t − T ),
is (d , t ) = i01 ( d , t ) + ε i11 ( d , t ) =
=
β ε 1 − e −α t −TT − t −T ε e − 0.5ε e −α t −TT + e − 0.5ε e −α t −TT ⋅ 1(t − T ).
T
Z 0 ⋅ (β + 1) β +1 α
E0
(3.96)
(3.97)
Ponieważ w dalszej części pracy, ze względu na zastosowanie w obliczaniu czasów przejścia
przez próg, rozważane będzie tylko napięcie na bramce obciążającej zostanie ono zapisane w
postaci ułatwiającej dalszą analizę:
vs (d , t ) = v01 (d , t ) + ε v11 (d , t ) =
α
α
− (t −T )
E0 t − T − T (t −T )
t −T
T
=
A
e
− B2 ⋅ 1 − e
+ C2
⋅ 1(t − T ),
β + 1 2 T
T
gdzie A2 = ε ⋅ e −0.5ε , C2 = ε
(3.98)
β ε
ε
, B2 = − 2 e −0.5ε +
.
β +1
β +1 α
α
β
Uzyskany wzór może zostać wykorzystany zarówno w analizie pojedynczego połączenia, jak
i przy analizie kilku połączeń sprzężonych. Zależność może zostać wykorzystana do
wyznaczenia czasu przejścia przez próg napięciowy, co zostanie zaprezentowane w
rozdziale 4. Poniżej przedstawiono wykres dla typowych parametrów połączeń o dużych
wartościach indukcyjności otrzymany na podstawie zależności (3.98) .
66
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.5 Odpowiedź skokowa dla typowych parametrów połączenia o dużej wartości indukcyjności [41].
Parametry linii transmisyjnej użyte w tej symulacji: Rt=25Ω, Lt=8nH, Ct=1pF, C0=0.1pF, Rw=25Ω, a –
symulacja w programie PSpice, b – symulacja z wykorzystaniem wzoru (3.98)
Rys. 3.6 Odpowiedź skokowa dla typowych parametrów połączenia o dużej wartości indukcyjności [41].
Parametry linii transmisyjnej użyte w tej symulacji: Rt=50Ω, Lt=10nH, Ct=1pF, C0=1pF, Rw=25Ω, a –
symulacja w programie PSpice, b – symulacja z wykorzystaniem wzoru (3.98)
gdzie vSPICE (d , ti ) jest wynikiem symulacji odpowiedzi na skok jednostkowy w programie
PSpice, a vs (d , ti ) jest obliczone za pomocą wzoru (3.98).
Tabela 3.2 przedstawia maksymalne błędy uzyskane przy symulacjach układu pojedynczego
połączeniach o parametrach typowych dla połączeń o małych stratach i dużych wartościach
67
Propagacja sygnału w połączeniach układów VLSI
indukcyjności [41]. Błąd obliczono podobnie jak wcześniej na podstawie porównania
wyników z obliczeń zaprezentowaną metodą oraz wyników symulacji w programie PSpice:
(3.99)
vSPICE ( d , ti ) − vs ( d , ti )
100%
v SPICE (d , ti )
δ 01 = max
gdzie vSPICE (d , ti ) jest wynikiem symulacji odpowiedzi na skok jednostkowy w programie
PSpice, a vs (d , ti ) jest obliczone za pomocą wzoru (3.98).
Tabela 3.2. Maksymalny procentowy błąd odpowiedzi (3.98)
[%]
R=50Ω
L[nH]
(β)
2
(0.559)
5
(0.354)
8
(0.28)
10
(0.25)
C0[pF] (α)
R=25Ω
C0[pF] (α)
0.1
(10)
0.5
(5)
1
(1)
0.1
(10)
0.5
(5)
1
(1)
1.118
14,5
9,6
4,4
0.559
3,5
1,5
0,65
0.707
2,4
1,6
3,1
0.354
4,4
0,6
1,2
0.559
1,6
1,8
3,3
0.28
3,4
0,6
1
0.5
0,82
1,9
3,1
0.25
2,6
0,6
0,9
ε
ε
Dla lepszej oceny jakości metody, w tabeli zaznaczono komórki, odpowiadające wartościom
błędów mniejszych niż 5%. Dodatkowo na czerwono zaznaczono wartości mniejsze niż 1%.
Symulacje potwierdzają, że metoda daje bardzo dobre rezultaty dla połączeń o małych
wartościach rezystancji, wraz ze wzrostem wartości rezystancji skuteczność pogarsza się,
zasadniczo jednak, gdy ε nie przekracza wartości 1, błąd w zakresie 0<t<3T nie przekracza
kilku procent.
3.1.2. Odpowiedź na zbocze narastające.
Odpowiedzią na zbocze narastające (ang. ramp response), będę w dalszej części pracy
nazywać wymuszenie, będące złożeniem dwóch wymuszeń liniowych (Rys. 3.7). Takie
wymuszenie można stosować jako model wymuszenia rzeczywistego [89].
68
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.7. Wymuszenie rzeczywiste impulsu jako złożenie dwóch wymuszeń o charakterze liniowym
Model analityczny wymuszenia przyjmie postać:
E
E
~
e (t ) = 0 t ⋅ 1(t ) − 0 (t − Tr ) ⋅ 1(t − Tr ),
Tr
Tr
(3.100)
~
~
E0
E0
~
e (τ ) =
T ⋅ τ ⋅ 1(τ ) −
T (τ − τ r ) ⋅ 1(τ − τ r ),
(3.101)
po normalizacji:
τr
τr
gdzie: τ r = Tr T .
W celu obliczenia odpowiedzi na zbocze narastające, zostanie wykorzystana odpowiedź
skokowa – poprzez scałkowanie wyrażenia analitycznego na odpowiedź połączenia na skok
jednostkowy. W związku z tym, konieczne jest rozważenie dwóch przedziałów czasu – czyli
odpowiedzi obliczanej w czasie trwania sygnału narastającego 0<t<Tr oraz odpowiedzi
obliczanej po zakończeniu narastania sygnału wejściowego t>Tr. Odpowiedź na zbocze
narastające na końcu połączenia oznaczone zostanie jako vr (t , d ) i obliczone wg zależności:
t
∫ vs (τ , d ) dτ dla t ≤ Tr
0
.
v r (t , d ) = t
∫ vs (τ , d )dτ dla t > Tr
t −Tr
(3.102)
W praktyce v r (t , d ) można obliczyć np. poprzez scałkowanie wyrażenia (3.98). Dla
t ≤ T + Tr po uwzględnieniu opóźnienia T otrzymujemy:
69
Propagacja sygnału w połączeniach układów VLSI
t
v r (t , d ) = ∫ vs (τ , d )dτ =
T
α
α
− (t −T )
E0 t − T − T (t −T )
+ C t − T ⋅ 1(t − T ) =
T
=∫
A
e
−
B
⋅
1
−
e
2
2
2
T
T
β + 1
T
t
t
α
α
− (t −T ) B
− (t −T )
E0 A2
0.5t 2 − Tt
2
T
T
(αt − αT + T )e
−
−
⋅ αt + Te
+ C2
=
T
β + 1 α 2
α
T
(3.103)
α
2
E0T 1 t − T
t −T
A2 − T (t −T )
C2
=
−
B
−
K
+
e
+
K
2
2
2 .
(β + 1)Tr 2 T
α
T
Dla czasów większych niż czas narastania wygodniej niż liczyć całkę jest zastosować
równanie:
(3.104)
er 2 (t ) = er1 (t ) − er1 (t − Tr ),
gdzie er 2 (t ) oznaczałoby wymuszenie dla czasów większych niż Tr natomiast er1 (t ) dla
czasów mniejszych niż Tr. Takie podejście, ze względu na liniową zależność odpowiedzi od
wymuszenia:
(3.105)
vr 2 (t ) = vr1 (t ) − vr1 (t − Tr ),
gdzie podobnie jak poprzednio vr 2 (t ) będzie oznaczało odpowiedź na zbocze narastające dla
czasów większych niż Tr, natomiast vr1 (t ) dla czasów mniejszych niż Tr. Ostatecznie
zależność na odpowiedź na zbocze narastające przyjmie postać:
E0
vr (t ) =
(β + 1)Tr
C
2
2
( )
t −T 2
T
− B2 t −TT
+
(
K1 t −TT
t −T
−α
t
−
T
T T + C ⋅T
2
2 r
E0 K1 T e
vr (t ) =
(β + 1)Tr C2 ⋅ Tr2
− B ⋅ Tr
−
2
dla t − T ≥ Tr ,
70
)
− K2 e
t −T
T
(
−α
t −T
T
+ K 2 , dla t − T ≤ Tr ,
αTr
− K 2 ⋅ T2 − K1 ⋅ Tr e
)e
−α
t −T
T
,
(3.106)
Propagacja sygnału w połączeniach układów VLSI
K1 = −
B − K1
αT
, K2 = 2
, T2 = 1 − e r .
α
α
A2
(3.107)
Podobnie jak poprzednio, otrzymaną zależność poddano szczegółowym badaniom
symulacyjnym i porównaniu z wykresami otrzymanymi w programie typu PSpice. Poniżej
przedstawiono wykres ilustrujący przykładową symulację dla typowych parametrów połączeń
o znacznych indukcyjnościach, symulacja została przeprowadzona dla czasu pierwszej fali
wędrownej czyli 0<t<3T.
Rys. 3.Odpowiedź połączenia na zbocze narastające dla typowych parametrów połączenia o dużej wartości
indukcyjności [41]. Parametry linii transmisyjnej użyte w tej symulacji: Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.1pF,
Rw=25Ω, Tr=30ps, a – symulacja w programie PSpice, b – symulacja z wykorzystaniem wzoru (3.106).
3.2. Analiza odpowiedzi dla połączeń sprzężonych
Na podstawie pojedynczego połączenia, możliwe jest określenie odpowiedzi dwóch lub
więcej połączeń sprzężonych w stosunkowo prosty sposób, o ile takie połączenia
charakteryzują się macierzą parametrów, dla której możliwa jest diagonalizacja, za pomocą
dwóch rzeczywistych macierzy. Taka sytuacja zachodzi wtedy, gdy rozważamy połączenia
bezstratne sprzężone, lub połączenia o pewnej określonej symetrii [67].
Równanie dla takich linii sprzężonych [73] przyjmie postać:
71
Propagacja sygnału w połączeniach układów VLSI
∂
∂
V( x, t ) = −R ⋅ I( x, t ) − L I( x, t ),
∂x
∂t
(3.108)
∂
∂
I( x, t ) = −G ⋅ V ( x, t ) − C V( x, t ),
∂x
∂t
gdzie V ( x, t ), I ( x, t ) oznaczają odpowiednio wektory prądów i napięć na kolejnych
połączeniach, a R , L, C, G odpowiednio macierze rezystancji, indukcyjności, pojemności i
konduktancji. W przypadku połączeń w układach scalonych, można przyjąć macierz G jako
pomijalnie małą (dla układu przedstawionego na Rys. 3.1 jest to różnica dla pojedynczego
połączenia rzędu R=10Ω w stosunku do 1/G=10^8Ω). Po zapisaniu równań w bardziej zwartej
formie i uwzględnieniu G=0, otrzymamy:
0 R V ( x, t ) 0 L ∂ V ( x, t )
∂ V ( x, t )
= −
−
∂x I ( x, t )
0 0 I ( x, t ) C 0 ∂t I ( x, t )
(3.109)
W pracy zostanie przedstawiony przykład dwóch połączeń sprzężonych, o parametrach RLC
(uwzględnione sprzężenia pojemnościowe i indukcyjne), o jednakowych parametrach obu
połączeń
sprzężonych.
Przykład
z
uwzględnieniem
parametrów
przestrzennych
przedstawiony jest na rysunku Rys. 3.8.
Rys. 3.8. Symetryczna struktura układu dwóch połączeń sprzężonych. Wymiary geometryczne: W1= 1µm,
S=2µm, T1=300µm, T2=3µm, T3=1µm, długość d=5mm, parametry materiałowe: εSi=11.9, εSi02=4.2,
σSi=10000S/m oraz σCu= 2.73e+7S/m
W przypadku dwóch jednakowych połączeń sprzężonych, możemy zastosować model
sprzężonych linii transmisyjnych, w którym uwzględniamy indukcyjność wzajemną linii M
oraz pasożytniczą pojemność, występującą pomiędzy liniami Cm, przedstawiony na rysunku
poniżej (Rys. 3.9):
72
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.9. Model połączeń sprzężonych oparty na linii transmisyjnej
Jeżeli obie linie cechują się jednakowymi parametrami geometrycznymi i materiałowymi, to
również model linii transmisyjnej RLC dla obu linii będzie miał takie same parametry. Dla
dwóch jednakowych sprzężonych połączeń, macierze z (3.109) parametrów przyjmą postać:
R 0
L
R=
, L=
0 R
M
M
C + C M
, C=
L
C
C
,
C + CM
(3.110)
R , L , C są w tym przypadku parametrami pojedynczego połączenia, C M i M - pojemnością i
indukcyjnością pasożytniczą, występującą pomiędzy dwoma połączeniami.
W celu wykorzystania wyników obliczeń dla pojedynczego połączenia do układów połączeń
sprzężonych, konieczne jest zdiagonalizowanie macierzy parametrów, tak aby można było je
rozpatrywać, jako połączenia rozprzężone, a następnie wykorzystać obliczone dla nich
odpowiedzi, do wyznaczenia odpowiedzi połączeń sprzężonych. Wyprowadzonej powyżej
metody wielu skal, nie udało się zastosować bezpośrednio w rozwiązywaniu równań
macierzowych linii transmisyjnej małostratnej, ze względu na niemożliwość skonstruowania
spełnialnych warunków sekularnych.
Układ równań (3.108), w sytuacji gdy macierze R i G są pomijalnie małe, czyli układ równań
bezstratnych można w łatwy sposób zdiagonalizować [79]. W przypadku analizy połączeń
stratnych, diagonalizacja jest możliwa, jeśli układ ma pewną określoną strukturę symetrii tak,
że macierze parametrów RLC odpowiadają symetrycznej trójdiagolnalnej macierzy
Toeplitz'a. Taka zależność zachodzi [22], gdy macierze R, L, C i G mają zachowaną
strukturę:
73
Propagacja sygnału w połączeniach układów VLSI
(3.111)
Taka struktura odpowiada połączeniom, w których wszystkie linie są jednakowe, a sprzężenia
występują tylko pomiędzy dwoma sąsiadującymi ze sobą połączeniami. Macierz T
diagonalizująca macierze RLCG [67] będzie miała wartości zgodne z równaniem:
!"
= $" Φ!&' (−2 cos ,j
π
12 345 6, 7 = 1,2, … , 9,
n+1
gdzie Φ! (>) = >Φ!&' (>) − Φ!&? (>)345 6 = 2, … , 9, Φ@ (>) = 1, Φ' (>) = >,
(3.112)
(3.113)
oraz $" arbitralnie przyjętym współczynnikiem, który może zostać w celu znormalizowania
wektorów własnych macierzy.
W przypadku macierzy dwuwymiarowej (dla dwóch linii sprzężonych, dla których można
pominąć macierz konduktancji G oraz wartość rezystancji pomiędzy przewodami), można
wykorzystać [5] macierz:
S=
1 1 1
,
2 1 − 1
(3.114)
po rozprzężeniu:
C d = S ⋅ C ⋅ S −1 , L d = S ⋅ L ⋅ S −1 , R d = S ⋅ R ⋅ S −1 ,
(3.115)
(macierze Cd , L d , R d oznaczają macierze diagonalne dla linii rozprzężonych) otrzymamy
parametry dla pojedynczych linii (indeksy przy symbolach parametrów oznaczają kolejne
linie rozprzężone): R1=R2=R, L1=L+M, L2=L+M, C1=C, C2=C+2Cm, e1(t)=e2(t)=e(t), Rw1=
Rw2=Rw, C01= C02=C0.
Po obliczeniu wartości napięć i prądów dla pojedynczych linii rozprzężonych, korzystając z
zależności na odpowiedź skokową (3.98), lub na zbocze narastające (3.106), można wrócić do
układu połączeń sprzężonych, korzystając z tej samej macierzy diagonalizacji:
74
Propagacja sygnału w połączeniach układów VLSI
v (t ) 1 v (t ) + v2 (t )
v (t ) = S ⋅ v d (t ) = S ⋅ 1 = 1
,
v2 (t ) 2 v1 (t ) − v2 (t )
(3.116)
i (t ) 1 i (t ) + i2 (t )
i (t ) = S ⋅ i d (t ) = S ⋅ 1 = 1
.
i2 (t ) 2 i1 (t ) − i2 (t )
(3.117)
Gdzie wektory v (t ) oraz i (t ) oznaczają odpowiednio wektor napięć i prądów w liniach
sprzężonych, natomiast wektory v d (t ) oraz i d (t ) oznaczają wektory napięć i prądów dla linii
rozprzężonych oznaczonych kolejno indeksami 1 i 2, dla których parametry przedstawiono
we wzorze (3.115). Za napięcia v1 (t ) oraz v 2 (t ) można podstawić zarówno wyrażenia na
odpowiedź skokową (3.98), jak i na zbocze narastające (3.106).
Na Rys. 3.10 oraz Rys. 3.11 przedstawione zostały kolejno odpowiedź na skok jednostkowy i
zbocze narastające, dla tego samego przykładu dwóch połączeń sprzężonych, o liniach o
jednakowych parametrach. Dla przedstawionych przykładów widać bardzo dobrą zbieżność
wyników z symulacji w programie PSpice z wynikami otrzymanymi za pomocą metody wielu
skal.
Rys. 3.10. Odpowiedź skokowa dla układu jednakowych połączeń sprzężonych. Parametry linii transmisyjnych
zostały wzięte jako parametry typowych linii małostratnych [41], wartości: Rt=25Ω, Lt=8nH, Ct=1pF, Mt=3,2nH,
Cmt=0.1pF, C0=1pF, Rw=25Ω, a – symulacja w PSpice agresora, b – symulacja w PSpice ofiary, c – odpowiedź
agresora obliczona z zależności (3.116) i (3.98), d – odpowiedź ofiary obliczona z (3.116) i (3.98)
75
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.11. Odpowiedź na zbocze narastające (Tr=50ps) dla układu jednakowych połączeń sprzężonych.
Parametry linii transmisyjnych zostały wzięte jako parametry typowych linii małostratnych [41], wartości:
Rt=25Ω, Lt=8nH, Ct=1pF, Mt=3,2nH, Cmt=0.1pF, C0=1pF, Rw=25Ω, a – symulacja w PSpice agresora, b –
symulacja w PSpice ofiary, c – odpowiedź agresora obliczona z zależności (3.116) i (3.106), d – odpowiedź
ofiary obliczona z (3.116) i (3.106)
Kolejnym przykładem weryfikującym przydatność metody w analizie połączeń sprzężonych o
dużej wartości indukcyjności, jest symulacja odpowiedzi dla struktury przedstawionej na Rys.
3.8. Parametry RLC dla tej struktury zostały obliczone otrzymana w programie symulacji
rozkładu pola elektromagnetycznego IE3D firmy ZELAND Software. Poniżej w celu
lepszego zaprezentowania przykładu z Rys. 3.8, przedstawiono macierze oryginalnego układu
oraz macierze parametrów po rozprzężeniu Rys. 3.12. Dodatkowo, przedstawiono wartości
czasów opóźnień dla linii rozprzężonych oraz wartości parametru perturbacji. Zostaną
przedstawione i omówione dwie symulacje: symulacja odpowiedzi na zbocze narastające o
Tr=10ps (Rys. 3.13) oraz symulacja odpowiedzi na zbocze narastające o Tr=50ps (Rys. 3.14).
76
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.12. Parametry linii transmisyjnych dla struktury z Rys. 3.8. Niebieskim kolorem zaznaczono oryginalne
macierze parametrów linii, zielonym parametry RLC linii po rozprzężeniu, na czerwono wynikające z linii
rozprzężonych czas opóźnienia i epsilon
Rys. 3.13. Odpowiedź na zbocze narastające (Tr=10ps) dla układu jednakowych połączeń sprzężonych ze
struktury przedstawionej na Rys. 3.8. Parametry linii transmisyjnych otrzymano na podstawie symulacji w
programie IE3D, wartości: Rt=84Ω, Lt=8,76nH, Ct=0,3pF, Mt=5,1nH, Cmt=76fF, C0=0.1pF i Rw=84Ω, a –
symulacja w PSpice agresora, b – symulacja w PSpice ofiary, c – odpowiedź agresora obliczona z zależności
(3.116) i (3.106), d – odpowiedź ofiary obliczona z (3.116) i (3.106).
77
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.14. Odpowiedź na zbocze narastające (Tr=50ps) dla układu jednakowych połączeń sprzężonych ze
struktury przedstawionej na Rys. 3.8. Parametry linii transmisyjnych otrzymano na podstawie symulacji w
programie IE3D, wartości: Rt=84Ω, Lt=8,76nH, Ct=0,3pF, Mt=5,1nH, Cmt=76fF, C0=0.1pF i Rw=84Ω, a –
symulacja w PSpice agresora, b – symulacja w PSpice ofiary, c – odpowiedź agresora obliczona z zależności
(3.116) i (3.106), d – odpowiedź ofiary obliczona z (3.116) i (3.106).
Czas pojawienia się sygnału na końcu połączenia dla przykładu z Rys. 3.8 jest związany z
wartością czasu opóźnienia, dla linii rozprzężonej o mniejszym czasie opóźnienia, i dla tego
też czasu należy wyznaczyć granice stosowalności wzoru (3.116), jeśli do wyrażenia na
napięcie wstawimy (3.98), lub (3.106). Jest to związane z tym, że powyżej 3Tx, gdzie Tx jest
czasem opóźnienia linii o mniejszym opóźnieniu, wzory (3.98) i (3.106) nie są prawidłowe,
dlatego też przekształcenia na nich oparte będą dawać nieprawidłowy wynik.
Na rysunku Rys. 3.15 przedstawiono sygnały v1(t) oraz v2(t), które po odpowiednich
przekształceniach (sumowaniu lub odejmowaniu) dają sygnały w liniach sprzężonych. Na
wykresie zaznaczono czasy opóźnienia obliczone dla linii rozprzężonej pierwszej (T0), linii
rozprzężonej drugiej (T1) oraz pojedynczego połączenia (oryginalnego) bez uwzględniania
sprzężenia (Tbs).
78
Propagacja sygnału w połączeniach układów VLSI
Rys. 3.15. Graficzne przedstawienie sygnałów tworzących odpowiedź na zbocze narastające (Tr=10ps) dla
układu jednakowych połączeń sprzężonych (Rys. 3.13). a – wartość napięcia pierwszej linii rozprzężonej, b –
wartość napięcia drugiej linii rozprzężonej, c – odpowiedź agresora obliczona z zależności (3.116) na podstawie
wykresów a i b, d – odpowiedź ofiary obliczona z (3.116) na podstawie wykresów a i b.
79
Propagacja sygnału w połączeniach układów VLSI
80
Obliczanie czasów przejścia przez próg
4. Obliczanie czasów przejścia przez próg
Czas przejścia przez próg napięcia w danym węźle obwodu, związany z charakterystyką
połączenia, które doprowadziło sygnał do tego węzła oraz parametrami bramki odbiorczej jest
parametrem przydatnym w symulacji i projektowaniu obwodów. Wielu autorów próbuje
znaleźć efektywną metodę, pozwalającą na obliczanie czasu przejścia przez dowolny próg, za
pomocą w miarę prostego wzoru, umożliwiającego uniknięcie symulacji i obliczenie czasu,
tylko na podstawie parametrów. Dotychczasowe wyniki otrzymane w tej dziedzinie
omówiono w rozdziale 2.3.4. W kolejnych podrozdziałach zostanie zaprezentowana nowa
metoda obliczania czasów przejścia przez dowolny próg napięcia, oparta na obliczaniu
odpowiedzi skokowej i na zbocze narastające, przedstawionej w rozdziale 3.1.
4.1. Czas przejścia przez próg dla odpowiedzi skokowej
Obliczanie czasu przejścia sygnału przez dowolny próg napięcia (ang. threshold crossing
time, w pracy dla uproszczenia zapisu, będzie niekiedy stosowane określenie czas progowy),
dla dowolnej odpowiedzi można wykonać numerycznie poprzez procedury optymalizacji
błędu. W przypadku wyrażeń danych analitycznie, w pewnych przypadkach możliwe jest
także uzyskanie analitycznego wzoru określającego czas przejścia przez próg. Metoda wielu
81
Obliczanie czasów przejścia przez próg
skal, umożliwiła obliczenie napięcia na końcu połączenia w postaci analitycznej w funkcji
czasu (3.98). Uzyskana zależność jest stosunkowo dokładna dla połączeń małostratnych i
zostanie z niej wyznaczony czas przejścia przez próg. W tym celu, rozwiążemy poniższe
równanie, ze względu na zmienną ~t = (t − T ) / T (dla ułatwienia obliczeń w rozważaniach
wykorzystamy skalowanie czasu oraz zostanie pominięty czas opóźnienia – przyjmiemy, że
początkiem skali czasu jest ~t = 0, t = T ).
ρ=
Symbol ρ =
(
(
))
~
~
1
C2 ⋅ ~
t + A2 ⋅ ~
t ⋅ e −α t − B2 1 − e −α t ,
β +1
(4.1)
Ex
oznacza znormalizowany próg napięcia ( 0 ÷1 ⇒ 0 ÷100% wartości E0, Ex –
E0
wartość progu w [V]).
Przedstawione równanie nie ma rozwiązania analitycznego. W związku z tym w pracy
zastosowano dwa podejścia, umożliwiające uzyskanie wartości czasu przejścia napięcia przez
próg. W pierwszym podejściu, nazwanym zgrubnym obliczaniem czasu przejścia przez próg,
sprawdzono wpływ pominięcia wyrażenia liniowego C ⋅ ~t na wartość progu napięcia dla
2
parametrów linii małostratnych, a następnie rozwiązano (4.1) przy C 2 =0. Założenie, że
wpływ składnika liniowego jest pomijalnie mały, umożliwia wyznaczenie analitycznej
zależności na wartość czasu progowego. W drugim podejściu wykorzystano metody
numeryczne rozwiązywania równań nieliniowych, otrzymując po kilku – kilkunastu
iteracjach, wartość czasu bliską rzeczywistej wartości przecięcia wyrażenia na napięcie (3.98)
z wartością progu.
4.1.1. Zgrubne obliczenie czasu przejścia przez próg dla odpowiedzi
skokowej
~
W pierwszej części podrozdziału zostanie omówiony wpływ wyrażenia liniowego C ⋅ t na
wartość wyrażenia (3.98) oraz oszacowane zostaną warunki stosowalności uproszczenia do
obliczania czasu przejścia przez próg. W drugiej części podrozdziału zostanie natomiast
zaprezentowany sposób analitycznego obliczania czasu progowego, a następnie zostaną
zaprezentowane wyniki uzyskane za pomocą zgrubnego obliczenia czasu progowego. Poniżej
przedstawiono przykładowy wykres odpowiedzi skokowej, zawierającej składnik liniowy, w
82
Obliczanie czasów przejścia przez próg
porównaniu do odpowiedzi uproszczonej, bez składnika liniowego, wyznaczonej na
podstawie zależności:
(
(
))
~
E
~
~ ~
vsu ( d , t ) = 0 A2 t e −α t − B2 ⋅ 1 − e −α t .
β +1
(4.2)
Rys. 4.1. Porównanie dokładności obliczania odpowiedzi skokowej. a – symulacja w PSpice, b – wartość
napięcia obliczona wg (3.98), c – wartość napięcia obliczona wg (4.2). Parametry połączenia jak w przykładzie z
Rys. 3.10
Na wykresie zaznaczono dodatkowo wartości progu 0.5 (typowo przyjmowanego w
obliczeniach opóźnienia sygnału – opóźnienie Elmor'a) oraz progu 1 – dla wartości
wymuszenia. W obu przypadkach zaprezentowanego przykładu, różnice pomiędzy
obliczeniami zgrubnymi i obliczonymi bezpośrednio z metody wielu skal, nie są duże (dla
ρ=0.5 błąd procentowy (4.3) wartości napięcia wynosi 2.25%, dla ρ=1 wynosi 3.34%,
natomiast największy błąd, na końcu przedziału7.23%).
δ s % (t ) =
v s (d , t ) − v su (d , t )
100%,
v s (d , t )
(4.3)
gdzie v s (d , t ) dane jest zależnością (3.98), a v su (d , t ) zależnością (4.2).
Poniżej przedstawiono tabelę zawierającą wartości błędu na końcu przedziału, dla wybranych
wartości parametrów α , β , ε . Na żółto zaznaczono pola, dla których błąd nie przekroczył
10%, natomiast na czerwono zaznaczono wartości błędów, dla których β > 1 .
83
Obliczanie czasów przejścia przez próg
Tabela 4.1. Wartości procentowe błędu (4.3) powstałego poprzez zastosowanie uproszczonej formuły na
odpowiedź skokową połączenia dla końcu przedziału stosowalności wzoru (3.98). Parametry
niezmienne dla wszystkich symulacji: Rw=25Ω, C=1pF
β=ε
ε
α
1
2
3
4
5
6
7
8
9
10
0.1
0.2
0.3
1.137
0.989
0.966
0.96
0.957
0.955
0.954
0.953
0.952
0.952
4.459
3.821
3.701
3.658
3.636
3.622
3.612
3.604
3.599
3.594
9.794
8.256
7.921
7.789
7.717
7.67
7.637
7.612
7.593
7.578
0.4
0.5
0.6
0.7
0.8
0.9
16.918
14.013
13.315
13.022
12.858
12.752
12.678
12.623
12.58
12.546
25.548
20.785
19.561
19.029
18.73
18.537
18.401
18.301
18.223
18.162
35.362
28.263
26.353
25.508
25.032
24.725
24.51
24.351
24.229
24.133
46.012
36.154
33.42
32.198
31.509
31.067
30.758
30.531
30.356
30.218
57.147
44.193
40.529
38.884
37.959
37.366
36.953
36.65
36.418
36.234
68.44
52.161
47.5
45.404
44.227
43.475
42.954
42.571
42.277
42.046
0.6
0.7
0.8
0.9
12.415
7.664
6.187
5.519
5.165
4.96
4.834
4.754
4.701
4.664
17.141
10.562
8.513
7.581
7.085
6.795
6.616
6.5
6.422
6.367
22.699
13.96
11.231
9.986
9.318
8.926
8.681
8.52
8.41
8.331
29.109
17.866
14.346
12.734
11.864
11.349
11.024
10.808
10.659
10.552
β=0.5ε
ε
α
1
2
3
4
5
6
7
8
9
10
0.1
0.2
0.3
0.4
0.5
0.322
0.2
0.163
0.146
0.137
0.133
0.13
0.128
0.127
0.126
1.303
0.809
0.657
0.589
0.554
0.534
0.523
0.516
0.511
0.509
2.973
1.844
1.495
1.339
1.258
1.212
1.185
1.168
1.157
1.15
5.36
3.32
2.688
2.405
2.256
2.172
2.121
2.089
2.069
2.055
8.498
5.255
4.249
3.795
3.556
3.419
3.336
3.284
3.25
3.226
β=2ε
ε
α
1
2
3
4
5
6
7
8
9
10
84
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
2.598
2.239
2.074
1.979
1.917
1.874
1.841
1.816
1.796
1.779
8.316
7.565
7.113
6.829
6.637
6.498
6.393
6.312
6.247
6.194
15.205
14.445
13.759
13.286
12.951
12.704
12.516
12.369
12.251
12.156
22.318
21.927
21.115
20.49
20.028
19.681
19.414
19.204
19.037
18.902
29.227
29.454
28.615
27.884
27.321
26.889
26.554
26.289
26.079
25.911
35.756
36.717
35.921
35.125
34.485
33.985
33.593
33.284
33.038
32.843
41.855
43.561
42.845
42.01
41.313
40.76
40.323
39.978
39.705
39.489
47.524
49.918
49.292
48.435
47.695
47.1
46.628
46.254
45.959
45.727
52.789
55.773
55.228
54.355
53.581
52.952
52.452
52.055
51.742
51.498
Obliczanie czasów przejścia przez próg
Analizując tabelę (Tabela 4.1) można zauważyć zasadniczą tendencje – wartości błędu maleją
wraz ze zmniejszaniem się ε oraz zasadniczo rosną wraz ze zmniejszaniem się α (za
wyjątkiem kilku przypadków dla β=2ε, gdzie dla α<2 zależność nie jest prawdziwa).
Dodatkowo, wartości na końcu przedziału czasu są największe, więc dla momentu, gdzie
nastąpi przekroczenie progu (zwykle obliczenia wartości progu stosuje się dla opóźnienia
50%), zazwyczaj są znacznie mniejsze. Jako przykład, poniżej przedstawiono wykres dla
zestawu parametrów z tabeli, który daje największy błąd (β=2ε, α=2, ε=0.9). W tym
przypadku wartość progu 0.5 nie została osiągnięta dla napięcia, obliczonego ze wzoru
uproszczonego, więc dla takich parametrów nie można zastosować wzoru uproszczonego do
oszacowania czasu przejścia przez próg.
Rys. 4.2. Porównanie dokładności obliczania odpowiedzi skokowej. a – wartość napięcia obliczona wg (3.98), b
– wartość napięcia obliczona wg (4.2). Parametry połączenia – najgorszy przypadek z tabeli (Tabela 4.1) (β=2ε,
α=10, ε=0.9)
Uproszczony wzór na odpowiedź skokową (4.2) będzie generował stosunkowo małe błędy,
gdy składnik liniowy w (3.98) będzie stosunkowo mały, w porównaniu do pozostałych
składników, w rozważanym przedziale czasu (0<t<3T). Ten warunek można wyrazić jako:
2C2 << −B2 oraz (2 A + B )e−2α ≈ 0.
2
2
(4.4)
85
Obliczanie czasów przejścia przez próg
Na tej podstawie przyjmując 1 ≤ α ≤ 10 oraz 0 ≤ β ≤ 1 , można oszacować graniczną wartość
parametru ε pozwalającego na stosowanie wzoru (4.2) jako dobrego przybliżenia odpowiedzi
skokowej:
0 ≤ ε ≤ 0.3
(4.5)
Najgorszy przypadek spełniający warunek (4.5) (β=2ε, α=10, ε=0.3) przedstawiono na Rys.
4.3. Dla czasu odpowiadającego 50% wartości ustalonej sygnału, błąd aproksymacji napięcia
wynosi około 9% co jest równoważne błędowi aproksymacji czasu przejścia przez próg 4,3%.
Rys. 4.3. Porównanie dokładności obliczania odpowiedzi skokowej dla przypadku β=2ε, α=1, ε=0.3. a – wartość
napięcia obliczona wg (3.98), b – wartość napięcia obliczona wg (4.2)
Ponieważ dla wielu parametrów nowoczesnych połączeń, uproszczenie polegające na
usunięciu składnika liniowego z zależności (3.98), daje dobre przybliżenie, poniżej
wyprowadzona zostanie analityczna zależność na czas przejścia przez próg napięciowy, którą
można traktować w praktyce inżynierskiej jako zgrubne oszacowanie, a w przypadku
spełnienia warunków (4.4), z dużą dokładnością jako czas przejścia przez próg.
Wartość czasu przejścia przez próg obliczona zostanie z zależności
t ρ s u = (~
t + 1)⋅ T ,
~
t natomiast wynika z rozwiązania z nieliniowego równania:
86
(4.6)
Obliczanie czasów przejścia przez próg
ρ=
(
(
))
~
~
1
A2 ⋅ ~
t ⋅ e −α t − B2 1 − e −α t .
β +1
(4.7)
W celu rozwiązania powyższego równania, przekształcone zostanie ono do postaci:
(ρ ⋅ (β + 1) + B2 )α = ( A2α ⋅ ~t + B2α ) ⋅ e −α~t ,
(4.8)
Bα
z (~
t ) = − α ~
t + 2
A2
(4.9)
A2
A2
przyjmując:
oraz
a11 = −
(4.10)
B2 + ρ ⋅ (β + 1)
⋅α.
A2
Równanie (4.8) można zapisać:
~
(4.11)
B2α
z ( t )− A
2
a11 = z ( ~
t ) ⋅ e
,
ostatecznie po przyjęciu:
−
B + ρ ⋅ (β + 1)
a1 = − 2
⋅α ⋅ e
A2
równanie można zapisać w postaci:
ze z = a1,
B 2α
A2
,
(4.12)
(4.13)
rozwiązanie powyższego równania można wyrazić przez znaną funkcją W Lamberta np. [8].
W powyższym równaniu, tylko lewa strona zależy od czasu przejścia przez próg, który jest
niewiadomą równania, prawa natomiast jest kombinacją stałych, znanych parametrów modelu
połączenia. Pozwala to na określenia rozwiązania równania za pomocą funkcji W Lamberta
jako:
z = W ( a1 ),
ostatecznie:
(4.14)
87
Obliczanie czasów przejścia przez próg
1
B
t ρ s u = − W (a1 ) − 2 + 1T .
A2
α
(4.15)
Funkcja W Lamberta jest znaną funkcją specjalną, służącą do rozwiązywania nieliniowych
równań postaci (4.13) [21].. W niektórych programach matematycznych
matematycznych, np. w
MATHEMATICA, funkcja została zaimplementowana jako funkcja wbudowana. Wartości
funkcji nie są zależne od wartości parametrów w funkcji z, a parametr a1 określa miejsce
odczytu wartości funkcji na osi z ((Rys. 4.4).
Rys. 4.4. Funkcja W Lamberta [15]
Funkcję W Lamberta można także aproksymować za pomocą funkcji analitycznych.
alitycznych. Jest
stosunkowo dużo prac poświęconych właśnie temu zagadnieniu, np. [8], [15],
[15] badających
aproksymację za pomocą różnych funkcji
funkcji, dla różnych przedziałów argumentu funkcji. W
przedstawianym
ianym w pracy zastosowaniu
zastosowaniu, najdogodniejsza do zastosowania wydaje się być
aproksymacja funkcji W (4.16), zaczerpnięta z pracy [8].
z
2z
W + ( z ) = C ⋅ ln1.2
− C7 ln
, z>0
0
1
ln (1 + 2 z )
z
ln 2.4
ln (1 + 2.4 z )
W ( z) =
2 1+ e ⋅ z
W − ( z ) =
− 1, z ≤ 0
0
1 + e ⋅ z ⋅ C5 − C 6 1 + e ⋅ z
1+
C3 − C4 1 + e ⋅ z
(
)
gdzie C1=1.459, C3=10.243, C4=4.214, C5=4.83, C6=1.16, C7=0.459.
88
(4.16)
Obliczanie czasów przejścia przez próg
Wyniki symulacji dla czasów obliczonych na podstawie wzoru (4.15), przedstawiono w
następnym podrozdziale, jako porównanie z metodą iteracyjną obliczania czasu przejścia
przez próg.
4.1.2. Obliczanie czasu przejścia przez próg odpowiedzi skokowej
metodą iteracyjną
W przypadku, kiedy pominięcie składnika liniowego nie jest możliwe, konieczne jest
numeryczne obliczenie wartości czasu przejścia przez próg. Można zastosować metody
optymalizacyjne, poprzez znalezienie przecięcia funkcji napięcia z wartością równą 0.5E0.
Możliwe jest także zastosowanie metod iteracyjnych rozwiązywania równań nieliniowych. W
najprostszym przypadku można równanie (4.1) rozważać jako równanie postaci:
(4.17)
x = F (x ),
które może zostać rozwiązane za pomocą procedury iteracyjnej [11].
Równanie (4.1), podobnie jak poprzednio równanie (4.2), przekształcimy do postaci
zawierającej funkcję ze z :
(4.18)
a2 − K ⋅ z = ze z .
W tym celu równanie (4.1) przekształcimy w następujący sposób:
(4.19)
ρ (β + 1) + B 2 = C 2 ⋅ ~t + ( A2 ⋅ ~t + B 2 ) ⋅ e −α t ,
~
−
−
α
A2
α
A2
(4.20)
(ρ (β + 1) + B2 ) = − α ⋅ C2 ⋅ ~t + − α ⋅ ~t − αB2 ⋅ e −α t ,
(ρ (β + 1) + B2 )e
A2
−
αB2
A2
=−
α ⋅ C2
A2
−
e
αB2
A2
A2
~
αB
αB2 −α~t − A22
~
~
⋅e e
⋅ t + − α ⋅ t −
,
A2
(4.21)
podstawiając:
αB
z = − α ⋅ ~
t − 2 ,
A2
(4.22)
89
Obliczanie czasów przejścia przez próg
otrzymamy
−
α
A2
(ρ (β + 1) + B2 )e
−
αB2
A2
=−
α ⋅ C2
A2
−
e
αB2
A2
~
⋅ t + z ⋅ ez ,
B2
(4.23)
2
B ⋅ C −α
C −α
jest to równanie (4.18), gdzie: a2 = a1 − α 2 2 2 e A2 , K = 2 e A2 .
A2
A2
B
Zgodnie z procedurą iteracyjną z ( n +1) otrzymamy wtedy z zależności:
z (n+1) = W a2 − K ⋅ z (n) dla n=0,1,2…,
(
)
(4.24)
gdzie z jest funkcją czasu, a z ( 0 ) jest wartością początkową, np. równą zero z (0) = 0 .
Ostatecznie, czas przejścia sygnału przez wartość progu, dany jest zależnością:
1
B
t ρ( ns ) = − z ( n ) − 2 + 1T dla n=0,1,2…
A2
α
(4.25)
Symulacje pokazują, że dla typowych wartości parametrów połączeń małostratnych, liczba
iteracji nie musi być duża (z reguły ok. 5-10 iteracji do osiągnięcia ustalonego błędu
aproksymacji). W obliczeniach można zastosować inne, bardziej wyrafinowane sposoby
rozwiązania równania nieliniowego [11], jednak prosta metoda przedstawiona powyżej, daje
w tym zastosowaniu bardzo dobre rezultaty, nie wydaje się więc uzasadnione stosowanie
metod bardziej złożonych.
Poniżej przedstawiono tabelę zawierającą porównanie wyników przedstawionych metod
obliczania czasu przejścia przez próg (metody uproszczonej i iteracyjnej), z czasami przejścia
przez próg obliczonymi za pomocą PSpice. W tabeli umieszczono także względny
procentowy błąd (w odniesieniu do czasu uzyskanego z symulacji w programie PSpice).
Odczytywanie w programie PSpice wartości przejścia przez próg wiąże się zawsze z pewnym
błędem odczytu, czego unika się stosując metody analityczne obliczania czasu przejścia przez
próg.
90
Obliczanie czasów przejścia przez próg
Tabela 4.2. Porównanie wyników obliczeń czasu przejścia przez próg dla odpowiedzi skokowej z wynikami
uzyskanymi w programie PSpice oraz w pracy [41]
CT=1/α=0.1 –C0=0.1pF
RT=Rw/Rt
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
RT
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
RT
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
(n)
Lt
Z0
TSpice[ps]
tρsu [ps]
(4.15)
tρs [ps]
(4.25)
2
5
8
10
2
5
8
10
44,7
70,7
89
100
44,7
70,7
89
100
51
77
96
107
49
75
95
106
51,17
76,26
95,26
106,04
48,47
74,88
94,07
104,91
49,95
53
75,59
76
94,66
95
105,47
106
48,11
49
74,627
75
93,89
95
104,76
106
CT=0.5 – C0=0.5pF
tρs [ps]
(4.25)
tρISM [ps]
[41]
błąd[%]
dla tρsu
(n)
tρISM [ps]
[41]
błąd[%]
dla tρsu
0,33
0,96
0,77
0,9
1,08
0,16
0,98
1,03
błąd[%]
(n)
dla tρs
(4.25)
2,06
1,83
1,4
1,43
1,82
0,5
1,17
1,17
błąd[%]
(n)
dla tρs
błąd[%]
dla tρISM
3,92
1,3
1,04
0,93
0
0
0
0
Lt
Z0
TSpice[ps]
tρsu [ps]
(4.15)
2
44,7
71
-
-
71
-
-
0
5
70,7
95
106,37
95,15
92
12
0,16
3,16
8
89
115
125,81
115,25
112
9,4
0,22
2,61
10
100
126
137,57
126,92
124
9,18
0,73
1,59
2
44,7
61
68,88
61,54
60
12,9
0,89
1,64
5
70,7
88
96,24
89,87
88
9,36
2,13
0
8
89
110
117,59
111,07
110
6,9
0,97
0
10
100
121
129,74
124
123,13
CT=1 – C0=1pF
7,22
1,76
2,48
Lt
Z0
TSpice[ps]
tρsu [ps]
(4.15)
tρs [ps]
(4.25)
tρISM [ps]
[41]
błąd[%]
dla tρsu
(n)
(4.25)
błąd[%]
(n)
dla tρs
(4.25)
błąd[%]
dla tρISM
błąd[%]
dla tρISM
2
44,7
98
-
-
96
-
-
2,04
5
70,7
117
-
121,44
114
-
3,79
2,56
89
140
142,14
134
18,4
1,53
4,29
10
100
152
180,46
154,61
146
18,7
1,72
3,95
2
44,7
78
92,35
78,98
75
18,4
1,26
3,85
5
70,7
108
127,5
109,09
103
18,1
1,01
4,63
8
89
131
151,74
132,5
128
15,8
1,15
2,29
10
100
144
166,07
145,93
143
15,3
1,34
0,69
8
165,7
Wyniki uzyskane na podstawie szeregu symulacji pokazują, że dla małych wartości
pojemności obciążeń, możliwe jest przyjęcie zależności (4.15), jako wzoru określającego
czas przejścia przez próg. W przypadku większych pojemności, takie zgrubne oszacowanie,
powoduje powstawanie kilkunastoprocentowych błędów. W tabeli znajdują się 3 zestawy
parametrów dla których nie udało się obliczyć czasu przejścia przez próg 50% wartości
91
Obliczanie czasów przejścia przez próg
napięcia. W tych przypadkach niemożliwe było obliczenie funkcji zależności na czas
korzystając z funkcji (4.15).
4.2. Czas przejścia przez próg dla odpowiedzi na zbocze
narastające
Rozważania przedstawione w rozdziale 4.1 można powtórzyć dla odpowiedzi na sygnał
narastający. W tym przypadku, zagadnienie obliczenia analitycznej zależności, można
dodatkowo podzielić na sytuacje, w których czas przejścia przez próg mieści się w przedziale
0 < t ρ < Tr + T i sytuacje, w których t ρ > Tr + T .
Symulacje pokazują, że przyjmując czas narastania ok. 10% wartości czasu opóźnienia T,
zasadniczo możemy ograniczyć się do rozważania wzoru na napięcie dla t>Tr. Poniżej (Rys.
4.5 – Rys. 4.8), przedstawiono kilka przykładowych wykresów, które dodatkowo pokazują, że
nawet jeśli czas narastania Tr jest większy, to funkcja reprezentująca czasy większe niż Tr
przyjęta jako odniesienie do obliczeń czasu przekroczenia progu napięcia, w tym zakresie nie
wprowadza dużego błędu. Szczególnie widać to na wykresie z Rys. 4.8.
Rys. 4.5. Złożenie odpowiedzi na zbocze narastające z przebiegu dla czasu trwania narastania wymuszenia
(0<t<Tr) i czasu trwania wartości ustalonej wymuszenia (t>Tr), dla przykładowych parametrów połączeń o dużej
wartości indukcyjności (Rt=50Ω, Lt=8nH, Ct=1pF, C0=0.5pF i Rw=25Ω,) . a – wartość napięcia obliczona wg
(3.106) dla przedziału 0<t<Tr, b – wartość napięcia obliczona wg (3.106) dla przedziału t>Tr, c – symulacja
odpowiedzi w PSpice
92
Obliczanie czasów przejścia przez próg
Rys. 4.6. Złożenie odpowiedzi na zbocze narastające z przebiegu dla czasu trwania narastania wymuszenia
(0<t<Tr) i czasu trwania wartości ustalonej wymuszenia (t>Tr), dla przykładowych parametrów połączeń o dużej
wartości indukcyjności (Rt=50Ω, Lt=2nH, Ct=1pF, C0=0.1pF i Rw=25Ω,) . a – wartość napięcia obliczona wg
(3.106) dla przedziału 0<t<Tr, b – wartość napięcia obliczona wg (3.106) dla przedziału t>Tr, c – symulacja
odpowiedzi w PSpice
Rys. 4.7. Złożenie odpowiedzi na zbocze narastające z przebiegu dla czasu trwania narastania wymuszenia
(0<t<Tr) i czasu trwania wartości ustalonej wymuszenia (t>Tr), dla przykładowych parametrów połączeń o dużej
wartości indukcyjności (Rt=50Ω, Lt=10nH, Ct=1pF, C0=0.1pF i Rw=25Ω,) . a – wartość napięcia obliczona wg
(3.106) dla przedziału 0<t<Tr, b – wartość napięcia obliczona wg (3.106) dla przedziału t>Tr, c – symulacja
odpowiedzi w PSpice
93
Obliczanie czasów przejścia przez próg
Rys. 4.8. Złożenie odpowiedzi na zbocze narastające z przebiegu dla czasu trwania narastania wymuszenia
(0<t<Tr) i czasu trwania wartości ustalonej wymuszenia (t>Tr), dla przykładowych parametrów połączeń o dużej
wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.1pF i Rw=25Ω,) . a – wartość napięcia obliczona wg
(3.106) dla przedziału 0<t<Tr, b – wartość napięcia obliczona wg (3.106) dla przedziału t>Tr, c – symulacja
odpowiedzi w PSpice
Biorąc pod uwagę powyższe rozważania, wzór na czas przejścia przez próg, można obliczyć z
~
zależności (4.26), rozwiązując równanie ze względu na t
(
)
~
~
C T2
K1T2 ~
t e −α t + C2Tr ~
t − e −α t K 2T2 − K1Tr eαTr − 2 r − B2Tr
2
.
ρ=
(β + 1)Tr
(4.26)
Podobnie jak poprzednio, równanie (4.26) zostanie rozwiązane w sposób numeryczny,
poprzez kilkakrotne iterowanie oraz w sposób przybliżony, poprzez pominięcie wyrażenia
liniowego.
4.2.1. Zgrubne obliczenie czasu przejścia przez próg dla odpowiedzi na
zbocze narastające .
We wzorze (4.26) występuje, podobnie jak dla odpowiedzi skokowej składnik
~
uniemożliwiający analityczne rozwiązanie równania, ze względu na zmienną t , zawierający
liniową zależność od czasu. Składnik ten, wynika z poprawki do wyznaczonego w zerowym
przybliżeniu O(1) wyrażenia napięcia, które często jest wystarczającym przybliżeniem
stosowanym w metodzie skal wielokrotnych. Podobnie jak poprzednio, przeprowadzone
94
Obliczanie czasów przejścia przez próg
symulacje potwierdzają sensowność pominięcia wyrażenia liniowego. Przykładowy wykres
ilustrujący wpływ składnika liniowego przedstawiony jest na Rys. 4.9.
Rys. 4.9. Porównanie odpowiedzi na zbocze narastające obliczone ze wzoru (3.106) oraz ze wzoru (3.106) bez
składnika liniowego, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=8nH,
Ct=1pF, C0=0.5pF i Rw=50Ω,) . a – symulacja odpowiedzi w PSpice, b – wartość napięcia obliczona wg (3.106),
c – wartość napięcia obliczona wg (3.106) z pominięciem składnika liniowego (dla przedziału t>Tr)
W celu lepszego porównania i oceny powstania możliwych błędów, poprzez obliczanie czasu
ze wzoru przybliżonego, poniżej przedstawiono tabelę (Tabela 4.3) oraz kilka wykresów
ilustrujących najmniej korzystne sytuacje, dla stosowania uproszczenia, wytypowane na
podstawie tabeli.
Po założeniu, że wartość narastania liniowego jest pomijalnie mała w stosunku do wartości
pozostałych składników wzoru, otrzymamy postać napięcia, analogiczną do (4.2) przy
wymuszeniu skokowym:
(
)
~
~
C T2
K1T2 ~
t e −α t − e −α t K 2T2 − K1Tr eαTr − 2 r − B2Tr
2
.
ρ=
(β + 1)Tr
(4.27)
Przekształcając zależność (4.27), podobnie jak w przypadku odpowiedzi skokowej,
otrzymamy:
ρ (β + 1)Tr + C 2T + BTr
2
2 r
K1T2
(
K T − K1Tr eαTr
= ~
t − 2 2
K1T2
) ⋅ e
−α ~
t
.
(4.28)
95
Obliczanie czasów przejścia przez próg
Tabela 4.3 Procentowy błąd odpowiedzi na końcu przedziału stosowalności [%]
β =ε
ε
α
1
2
3
4
5
6
7
8
9
10
0.1
0.2
0.3
1.137
0.989
0.966
0.96
0.957
0.955
0.954
0.953
0.952
0.952
4.459
3.821
3.701
3.658
3.636
3.622
3.612
3.604
3.599
3.594
9.794
8.256
7.921
7.789
7.717
7.67
7.637
7.612
7.593
7.578
0.4
0.5
0.6
0.7
0.8
0.9
16.918
14.013
13.315
13.022
12.858
12.752
12.678
12.623
12.58
12.546
25.548
20.785
19.561
19.029
18.73
18.537
18.401
18.301
18.223
18.162
35.362
28.263
26.353
25.508
25.032
24.725
24.51
24.351
24.229
24.133
46.012
36.154
33.42
32.198
31.509
31.067
30.758
30.531
30.356
30.218
57.147
44.193
40.529
38.884
37.959
37.366
36.953
36.65
36.418
36.234
68.44
52.161
47.5
45.404
44.227
43.475
42.954
42.571
42.277
42.046
0.5
0.6
0.7
0.8
0.9
11.506
8.418
7.61
7.3
7.151
7.066
7.011
6.972
6.942
6.918
14.244
9.546
8.183
7.615
7.335
7.181
7.088
7.027
6.984
6.952
17.28
10.703
8.661
7.737
7.247
6.962
6.787
6.673
6.597
6.543
20.645
11.928
9.111
7.765
7.003
6.529
6.217
6.003
5.852
5.743
24.375
13.248
9.576
7.767
6.702
6.009
5.528
5.178
4.917
4.716
β=0.5ε
ε
α
1
2
3
4
5
6
7
8
9
10
0.1
0.2
0.3
0.4
2.475
2.41
2.389
2.379
2.372
2.368
2.365
2.363
2.362
2.36
4.664
4.376
4.295
4.257
4.234
4.219
4.208
4.2
4.193
4.189
6.785
5.955
5.765
5.682
5.634
5.602
5.58
5.563
5.55
5.54
9.035
7.256
6.842
6.683
6.599
6.547
6.511
6.484
6.463
6.446
β=2ε
ε
α
1
2
3
4
5
6
7
8
9
10
96
0.1
8.208
7.979
7.905
7.869
7.848
7.833
7.823
7.816
7.81
7.805
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
13.61
12.699
12.443
12.319
12.246
12.198
12.164
12.138
12.119
12.103
18.044
15.709
15.152
14.904
14.76
14.667
14.6
14.551
14.513
14.483
22.372
17.823
16.72
16.281
16.047
15.899
15.796
15.719
15.661
15.614
26.913
19.56
17.593
16.814
16.428
16.203
16.054
15.947
15.866
15.802
31.803
21.212
18.111
16.796
16.135
15.762
15.531
15.376
15.264
15.18
37.128
22.928
18.503
16.488
15.41
14.776
14.379
14.118
13.939
13.81
42.966
24.787
18.904
16.088
14.49
13.493
12.833
12.378
12.054
11.818
49.404
26.837
19.387
15.715
13.553
12.145
11.166
10.455
9.922
9.512
Obliczanie czasów przejścia przez próg
Oznaczając:
T3 =
2 ρ (β + 1)Tr + C2Tr2 + 2B2Tr
,
2K1T2
(4.29)
K 2T2 − K1Tr eαTr
,
K1T2
(4.30)
T4 =
uzyskamy zależność (4.27) przekształconą do postaci:
~
~
T3 = τ~ ⋅ e −α ⋅τ − e −α ⋅τ ⋅ T4 .
(4.31)
Mnożąc obustronnie przez − αeα ⋅T4
~
− αT3eα ⋅T4 = (− α τ~ + αT4 ) ⋅ e −α ⋅τ eα ⋅T4
(4.32)
z (τ~ ) = −α τ~ + αT4 ,
(4.33)
oraz przyjmując:
ar1 = −αT3eαT4 ,
(4.34)
otrzymamy podobnie jak przy analizie odpowiedzi skokowej funkcję:
ar1 = z ⋅ e z ,
(4.35)
której rozwiązaniem jest funkcja W Lamberta, omówiona w rozdziale 4.1.1.
z (τ~ ) = W (a r1 ).
(4.36)
Otrzymamy w ten sposób uproszczoną zależność na czas przejścia przez próg napięcia w
postaci:
W (ar1 )
+ T4 .
τ~ρ ru = −
α
(4.37)
97
Obliczanie czasów przejścia przez próg
Po przeskalowaniu do zmiennej czasu t otrzymamy
W (ar1 )
t ρ ru = −
+ T4 + 1 ⋅ T .
α
(4.38)
Wyniki przedstawiające skuteczność obliczeń czasu przejścia przez próg ze wzoru (4.38)
przedstawiono w tabeli w drugiej części rozdziału 4.2.2 (Tabela 4.3).
4.2.2. Obliczanie czasu przejścia przez próg na zbocze narastające
metodą iteracyjną.
W celu obliczenia czasu przejścia przez próg w przypadku bardziej ogólnym, z
uwzględnieniem składnika liniowego, równanie (4.26) można zapisać:
~
~
C τ~
T3 = τ~ ⋅ e −α ⋅τ + 2 − e −α ⋅τ ⋅ T4 .
K1T2
(4.39)
z (τ~ ) = −α (τ~ − T4 ),
(4.40)
z
τ~ = − + T4 ,
α
(4.41)
Przyjmując
czyli
możemy zapisać:
T3 = z e z − α
C2τ r z
αT
− + T4 e 4 .
K1T2 α
(4.42)
Przenosząc stałe na lewą stronę i wprowadzając oznaczenie:
ar 2 = ar1 +
Kr =
98
C2TrT4 αT4
e ,
T2 K1
C2Tr αT4
e ,
K1T2α
(4.43)
(4.44)
Obliczanie czasów przejścia przez próg
można zależność (4.42) przekształcić do postaci:
(4.45)
ar 2 − K r z = z e z .
Powyższą zależność można rozwiązać iteracyjnie, jako równanie nieliniowe postaci x=f(x),
jako:
(
)
z ( n +1) = W ar 2 − K r z ( n) .
(4.46)
Ostatecznie uzyskamy wzór iteracyjny na czas przejścia przez próg napięciowy postaci:
1
t ρ( nr) = − z ( n) − T4 T ,
α
(4.47)
gdzie z (n ) obliczane jest z zależności (4.46), a jeśli jako pierwsze przybliżenie z ( 0 ) zostanie
wybrana wartość 0, to z (1) = W (ar 2 ) .
Przedstawione podejście zostało przetestowane dla zbioru danych mieszczących się w
zakresie opisanym w literaturze [26], [41], jako połączenia małostratne o znacznym wpływie
indukcyjności (Tabela 4.4). Wyniki symulacji przedstawiono w tabeli (Tabela 4.4). Błąd
obliczeń został odniesiony do czasu przejścia przez próg otrzymanego z programu PSpice.
Otrzymane wyniki dają bardzo dobre rezultaty (dla wzoru iteracyjnego w przypadku Rw=Rt
poniżej jednego procenta, dla pozostałych danych błąd nie przekraczał kilku procent). Wzór
przybliżony można stosować, gdy pojemność na końcu połączenia przyjmuje nieduże
wartości. W tabeli zaznaczono wyniki, w których błąd jest mniejszy od 1%.
99
Obliczanie czasów przejścia przez próg
Tabela 4.4. Wyniki symulacji
RT=Rw/Rt
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
RT
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
RT
RT=0,5
Rt=50Ω
RT=1
Rt=25Ω
100
Lt
2
5
8
10
2
5
8
10
Z0
44,7
70,7
89
100
44,7
70,7
89
100
TSpice[ps]
53,66
79,8
98,97
109,76
53,73
79,87
99,04
109,74
Lt
2
5
8
10
2
5
8
10
Z0
44,7
70,7
89
100
44,7
70,7
89
100
TSpice[ps]
66,61
94,42
115,27
127,26
66,61
94,42
115,27
127,27
Lt
2
5
8
10
2
5
8
10
Z0
44,7
70,7
89
100
44,7
70,7
89
100
TSpice[ps]
83,87
113,7
136,57
149,67
83,87
113,6
136,57
149,65
CT=1/α=0.1 – C0=0.1pF
(10)
tρru [ps]
tρt [ps]
54,28
55,79
80,21
81,17
99,25
100,13
110,225
110,89
58
54,0
81,361
80,21
100,12
99,35
111,01
110,18
CT=0.5 – C0=0.5pF
(10)
tρru [ps]
tρt [ps]
57,66
83,92
100,26
103,46
120,26
114,75
132,01
70,1
66,72
86,47
94,99
105,32
116,17
116,04
128,22
CT=1 – C0=1pF
(10)
tρru [ps]
tρt [ps]
109,15
119,07
125,77
140,42
147,16
153,47
159,66
83,32
162,5
114,16
159,14
137,55
168,36
150,98
(10)
błąd tρru
1,16
0,51
0,28
0,42
7,95
1,87
1,09
1,16
błąd tρt [%]
3,969
1,719
1,169
1,028
0,51
0,427
0,316
0,401
błąd tρru
13,4
11,1
10,2
9,83
5,24
8,42
8,63
8,82
błąd tρt [%]
6,19
4,326
3,736
0,167
0,603
0,777
0,743
błąd tρru
30,1
4,72
2,82
2,54
43
16,5
12,5
błąd tρt [%]
10,62
7,756
6,671
0,657
0,49
0,718
0,887
(10)
(10)
Analiza wrażliwości, wpływ indukcyjności połączeń
5. Analiza wrażliwości, wpływ indukcyjności połączeń
Wrażliwość określa wpływ, jaki ma zmiana wartości parametru na działanie systemu. Analiza
wrażliwościowa pozwala ocenić, które z parametrów bardziej oddziałują na układ. Z punktu
widzenia projektowania układów VLSI, pozwala na zidentyfikowanie ilości zmiennych, które
mają krytyczny wpływ na pracę układu. Do wykonania analizy wrażliwościowej można
wykorzystać metody numeryczne. Zmieniając wartości różnych zmiennych w systemie
określa się wtedy ważność i wpływ każdej zmiennej układu [32]. W zagadnieniu analizy
wrażliwości dla pojedynczego połączenia, lub kilku połączeń sprzężonych można wyróżnić
pracę [101], w której autorzy proponują efektywną metodę optymalizacji pozwalającą na
dobór szerokości ścieżki w taki sposób, aby zminimalizować opóźnienia. Metoda oparta jest
na obliczeniu wrażliwości opóźnienia z wykorzystaniem metody momentów. Autorzy [18]
również wykorzystują wrażliwość odpowiedzi układu do optymalizacji parametrów. Analiza
wrażliwościowa jest wykonywana w dziedzinie częstotliwości. Jedną z podstawowych prac
dotyczących analizy wrażliwościowej jest [66] Autorzy wyprowadzają równania określające
wrażliwość z równań linii transmisyjnej i budują model do symulacji wrażliwości w
dziedzinie czasu. W tym rodziale zostanie przedstawiona analiza wrażliwości oparta na
wyprowadzonych wcześniej zależnościach określających napięcie na wyjściu połączenia.
101
Analiza wrażliwości, wpływ indukcyjności połączeń
5.1. Wrażliwość odpowiedzi skokowej
Wrażliwość odpowiedzi skokowej, podobnie jak wrażliwość odpowiedzi na zbocze
narastające na dowolny parametr λ , ze względu na istnienie analitycznego wzoru, może
zostać wyznaczona [70] bezpośrednio z definicji wrażliwości (5.1).
Svλ =
λ ∂v
v ∂λ
(5.1)
Wrażliwość napięcia na parametr λ będzie w pracy oznaczana jako Svλ . Symbol v jest
napięciem na końcu połączenia (w tej pracy identyfikowanym jako pierwsza fala odpowiedzi
skokowej lub na zbocze narastające obliczonym z wykorzystaniem metody skal
wielokrotnych), i będzie oznaczany odpowiednio vs dla odpowiedzi skokowej i vr dla
odpowiedzi na sygnał narastający, natomiast λ jest dowolnym parametrem, od którego to
napięcie zależy i będzie w dalszej części pracy zastępowane symbolem parametru, na który
wrażliwość będzie liczona. W rozdziale zostanie zaprezentowana wrażliwość napięcia
zarówno na zespół parametrów określających ogólne cechy obwodu, takie jak parametr
perturbacji ε związany bezpośrednio ze stratnością połączenia, parametry α , β związane z
parametrami zasilania i obciążenia, jak i parametry dotyczące samego modelu RLC oraz
parametry związane ze strukturą geometryczną połączenia. Korzystając z definicji (5.1) i
obliczając odpowiednie pochodne (po odpowiednich parametrach) można uzyskać zależność
czasową wrażliwości połączeń dla konkretnych parametrów połączeń. Podstawiając do
otrzymanej zależności analitycznej konkretny czas (np. czas przejścia przez próg, czas równy
2T lub 3T, gdzie T jest czasem opóźnienia) możliwe jest wyznaczenie zależności w danej
chwili czasowej i uzależnienie obliczonej zależności od innego parametru. W kolejnych
podrozdziałach przedstawiono obliczenia umożliwiające wyznaczenie wartości wrażliwości
na różne parametry połączeń. Załączono także przykładowe wykresy modułu wrażliwości
ilustrujące zmiany wrażliwości w czasie.
5.1.1. Wrażliwość na parametry określające straty i parametry we/wy
Metoda skal wielokrotnych opiera się na założeniu niedużej wartości współczynnika
perturbacji ε . Sytuacja taka ma miejsce, gdy rezystancja połączenia jest nieduża, a
indukcyjność linii duża, czyli dla połączeń małostratnych o dużych wartościach
102
Analiza wrażliwości, wpływ indukcyjności połączeń
indukcyjności. W pierwszej części rozdziału zostanie pokazana wrażliwość odpowiedzi
skokowej
połączenia
małostratnego
wartość
na
współczynnika
perturbacji
oraz
przeanalizowany wpływ tej zależności na wartość wyników otrzymanych metodą wielu skal.
Zmiana tego parametru przy niezmienionych pozostałych parametrach oznacza zmianę
rezystancji połączenia o taką samą wartość procentową.
S vεs =
(
(
)
(5.2)
)
~
ε ∂v s ε ∂ E 0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t ,
vs ∂ε vs ∂ε β + 1
gdzie ~t = (t − T ) / T w celu uproszczenia zapisu do obliczeń. Wzór na wrażliwość odpowiedzi
skokowej na parametr perturbacji przyjmie więc postać:
(
(
~
S vεs
A2′ ε =
B2′ ε =
∂B2
∂
=
∂ε
∂ε
)
)
(5.3)
~
E
A′ ~
t e −α t − B2′ ε ⋅ 1 − e −α t + C 2′ ε ~
t
= 0 ε 2ε ~ −α ~t
~
~ ,
β +1
A2 t e
− B2 ⋅ 1 − e −α t + C 2 t
(
(5.4)
)
∂A2
∂
=
ε ⋅ e − 0.5ε = (1 − 0.5ε )e −0.5ε ,
∂ε ∂ε
ε
β ε 1
− 2 e − 0.5ε +
=
β + 1 α α
α
C2′ ε =
(5.5)
β
− 0.5ε
−
,
(1 + α − 0.5ε )e
β + 1
(5.6)
∂C 2
∂
β
β
=
ε
=
.
∂ε
∂ε β + 1 β + 1
Podstawiając zależności (5.4) – (5.6) do (5.3) otrzymamy:
(1 − 0.5ε )e −0.5ε ~t e −α t
~
Svεs
E
= 0
β +1
−
~ ~
e − 0.5ε t e −α t −
[(1 + α − 0.5ε )e
α
1
((
1
α
)
− 0.5ε
β
](
~
)
β
− β +1 ⋅ 1 − e −α t + β +1 ~
t
)(
)
~
β ~
β
− ε2 e − 0.5ε + β +1 α1 ⋅ 1 − e −α t + β +1 t
.
(5.7)
Poniżej przedstawiono porównanie wyników uzyskanych z zależności (5.7) z wrażliwością
otrzymaną w programie PSpice (Rys. 5.1). Wrażliwość w programie PSpice obliczono
metodą przyrostową jako funkcję:
103
Analiza wrażliwości, wpływ indukcyjności połączeń
S vλ =
(v(t , λ ) − v(t , λ + ∆λ ) ) ⋅ λ + wrz ≅
v (t , λ ) ⋅ ∆λ
v (t , λ ) − v (t , λ ⋅ 1.01)
λ
≅
100 = S vSPICE
.
v (t , λ )
(5.8)
Gdzie wrz – wyrazy wyższych rzędów, które zostały pominięte w dalszych rozważaniach.
Przyrost wartości λ został do celów symulacji wybrany jako zmiana 1%. Symulacje
prowadzone dla każdego z parametrów potwierdzają, że dla większości obliczeń (za
wyjątkiem L i C, których zmiana wpływa na czas opóźnienia, co zostanie dokładniej
przeanalizowane później) wartość 1% jest odpowiednia dla otrzymania prawidłowych
wyników na wrażliwość.
Rys. 5.1. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr perturbacji otrzymanej z
zależności (5.7) z wrażliwością wyrażoną (5.8), dla przykładowych parametrów połączeń o dużej wartości
indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=1pF i Rw=25Ω, co oznacza ε=0.354, α=10, β=0.354), a –
wrażliwość obliczona w programie PSpice, b – wrażliwość obliczona z zależności (5.7).
Korzystając z zależności (5.7) możemy także przedstawić zależność wrażliwości na parametr
ε dla wybranego zestawu parametrów (Rys. 5.2 – Rys. 5.4). Wykresy przedstawiono dla
~
zmiennej znormalizowanej t w celu łatwiejszego porównywania wykresów o różnych
parametrach stałych czasowych w dalszej części pracy.
104
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.2. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr perturbacji, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom rezystancji
połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla parametru
perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d – wrażliwość dla
parametru perturbacji ε=0.708 => R=50Ω
Rys. 5.3. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr perturbacji, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom pojemności
obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 => C0=0.5pF, c –
wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
105
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.4. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr perturbacji, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom rezystancji
wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość dla
parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω, d –
wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
Z wykresów (Rys. 5.2 – Rys. 5.4) widać, że dla małych czasów wrażliwość na parametr
perturbacji rośnie, dla czasów bliskich 3T natomiast maleje. Zasadniczo na wartość
wrażliwości mają wpływ wszystkie parametry połączenia, największe wrażliwości dają duże
wartości rezystancji (Rys. 5.2), pojemności obciążenia (małe α) (Rys. 5.3) oraz małe wartości
rezystancji wejściowej (Rys. 5.4). Dla rozważanego zestawu parametrów w najgorszym
przypadku uzyskano wartość wrażliwości 0.8, dla ε=1, α=1, β=0.1.
Kolejnym parametrem, na który zostanie zbadana wrażliwość jest parametr związany z
bramką na końcu połączenia, α , zawierający pojemność wejściową bramki obciążającej.
Zmiana tego parametru, przy niezmienionych pozostałych parametrach, oznacza odpowiednią
zmianę pojemności bramki. Zależność ta jest odwrotnie proporcjonalna, dwukrotne
zwiększenie α , jest równoważne dwukrotnemu zmniejszeniu C0. Rozważając bezpośrednio
wrażliwość na C0 musimy uwzględnić następującą zależność:
3BC EBC EF EBC EG EBC EH
=
+
+
,
3D@ EF ED@ EG ED@ EH ED@
ponieważ:
106
(5.9)
Analiza wrażliwości, wpływ indukcyjności połączeń
EF
D
= − ?,
ED@
D@
EG
= 0,
ED@
EH
= 0,
ED@
(5.10)
pochodna odpowiedzi skokowej otrzyma postać:
K
BCI
=
J
3BC
D EBC
D K
=− ?
= − ? BCL
3D@
D@ EF
D@
(5.11)
oraz wrażliwość:
MNOJ = −
I
K
K
D BCL
BCL
= −F
= MNLO .
D@ BC
BC
(5.12)
Podobnie jak dla parametru perturbacji, zależność na wrażliwość napięcia na zbocze
narastające na parametr F można obliczyć z wzoru:
Svαs =
(
(
)
)
~
α ∂v s α ∂ E 0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t ,
vs ∂α vs ∂α β + 1
(5.13)
gdzie ~t = (t − T ) / T . Wzór na wrażliwość odpowiedzi skokowej na parametr perturbacji
przyjmie więc postać:
S vαs
(
(
)
)
~
~
~
~
E0α A2′ α ~
t e −α t − A2α ~
t 2 e −α t − B2′ α 1 − e −α t − B2α ~
t e −α t + C 2′ α ~
t
=
,
~
~
~
~
−
α
t
−
α
t
β +1
A2 t e
− B2 ⋅ 1 − e
+ C2 t
(5.14)
a pochodne A2′α B2α C2′α są określone zależnościami (5.4) - (5.6).
Porównanie wyników otrzymanych w PSpice i z zależności (5.14) potwierdza przydatność
zastosowanej metody w obliczeniach wrażliwości, a błędy są w przypadku wrażliwości na
parametr α mniejsze niż w przypadku wrażliwości na parametr perturbacji.
107
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.5. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr α otrzymany z zależności (5.7) z
wrażliwością otrzymaną w programie PSpice, dla przykładowych parametrów połączeń o dużej wartości
indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=1pF i Rw=25Ω, co oznacza ε=0.354, α=10, β=0.354), a –
wrażliwość obliczona w programie PSpice, b – wrażliwość obliczona z zależności (5.7)
Zależność wrażliwości na parametr α, pod kątem wpływu innych parametrów, przedstawiono
na wykresach (Rys. 5.6 – Rys. 5.8). Podobnie jak poprzednio wykresy przedstawiono dla
~
zmiennej znormalizowanej t .
Rys. 5.6. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr α, dla przykładowych parametrów
połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354,
α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom rezystancji połączenia. a –
wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla parametru perturbacji ε=0.354
R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d – wrażliwość dla parametru
perturbacji ε=0.708 => R=50Ω
108
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.7. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr α, dla przykładowych parametrów
połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354,
α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom pojemności obciążenia. a –
wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 => C0=0.5pF, c – wrażliwość dla
parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
Rys. 5.8. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr α, dla przykładowych parametrów
połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354,
α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom rezystancji wyjściowej źródła. a –
wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość dla parametru perturbacji β=0.354
=> Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω, d – wrażliwość dla parametru
perturbacji β=0.708 => Rw=50Ω
Wrażliwość na parametr α w bardzo niewielkim stopniu zależy od zmian rezystancji
wejściowej (Rys. 5.8), silnie zależy natomiast od zmian pojemności obciążającej (Rys. 5.7)
Wartość wrażliwości w momencie pojawienia się sygnału na wyjściu połączenia jest zawsze
109
Analiza wrażliwości, wpływ indukcyjności połączeń
taka sama, równa wartości 1, natomiast na końcu trwania pierwszej fali jest zdecydowanie
niższa (bliska zeru), dla połączeń obciążonych bardzo małymi pojemnościami. Zależność od
zmian rezystancji połączenia (Rys. 5.6) jest zdecydowanie mniejsza niż w przypadku
obciążenia, jednak daje się zauważyć tendencja, że wraz ze wzrostem rezystancji (ε rośnie)
rośnie wartość wrażliwości.
Omówię teraz zależność wrażliwości odpowiedzi skokowej na parametr związany z bramką
wejściową β. Parametr ten jest wprost proporcjonalny do rezystancji wyjściowej bramki
zasilającej, a wrażliwość na niego może zostać obliczona z wzoru:
S vβ =
s
(
(
)
)
~
β ∂v s β ∂ E 0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t ,
vs ∂β vs ∂β β + 1
(5.15)
gdzie ~t = (t − T ) / T .
Ponieważ:
PK?Q =
EP?
= 0,
EG
(5.16)
wzór na wrażliwość odpowiedzi skokowej na β przyjmie postać:
(
~
−α t
)
~
− B2′ β 1 − e
+ C2′ β t
β E0 1
,
Sv =
− ~ −α ~t
~
s
(β + 1) β + 1 A2 t e − B2 ⋅ 1 − e −α t + C2 ~t
β
gdzie
K
R?Q
=
K
D?Q
=
(
)
ER? H
1
=
,
EG
F (G + 1)?
ED?
1
=H
.
(G + 1)?
EG
(5.17)
(5.18)
(5.19)
Dodatkowo na podstawie (5.17) można wyprowadzić bezpośrednią zależność na wrażliwość
na rezystancję wejściową. Uwzględniając:
3BC
EBC EF
EBC EG
EBC EH
=
+
+
,
3ST
EF EST EG EST EH EST
110
(5.20)
Analiza wrażliwości, wpływ indukcyjności połączeń
EF
EG
EH
1
= 0,
= 0,
=
,
EST
EST
EST U@
(5.21)
otrzymamy wzór na pochodną napięcia postaci
K
BCV
=
W
3BC
EBC 1
1 K
=
= BCQ
,
3ST EG U@ U@
(5.22)
oraz zależność na wrażliwość postaci:
MNOW =
V
1 K ST G K
Q
BCQ
= BCQ = MNO .
U@
BC
BC
(5.23)
Poniżej przedstawiono wykres (Rys. 5.9) obrazujący przykładowy przebieg wrażliwości
obliczonej z (5.17) dla typowych parametrów połączeń o dużej wartości indukcyjności. Dla
porównania przedstawiono również przebieg otrzymany z programu PSpice. Można
zauważyć, że wrażliwość wyznaczona na podstawie wzoru na odpowiedź skokową,
otrzymanego metodą wielu skal, która jest metodą przybliżoną, różni się od metody
przyrostów wyznaczonej na podstawie przebiegów symulowanych w PSpice. Przedstawiono
także wykresy (Rys. 5.10 - Rys. 5.12) ilustrujące zmiany wrażliwości dla różnych parametrów
połączeń.
Rys. 5.9. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr β otrzymany z zależności (5.17) z
wrażliwością otrzymaną w programie PSpice, dla przykładowych parametrów połączeń o dużej wartości
indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=1pF i Rw=25Ω, co oznacza ε=0.354, α=10, β=0.354), a –
wrażliwość obliczona w programie PSpice, b – wrażliwość obliczona z zależności (5.17)
111
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.10. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom rezystancji
połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla parametru
perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d – wrażliwość dla
parametru perturbacji ε=0.708 => R=50Ω
Rys. 5.11. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom pojemności
obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 => C0=0.5pF, c –
wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
112
Analiza wrażliwości, wpływ indukcyjności połączeń
0.5
τr
0.5
1
wrazliwosc
0.4
0.3
0.2
a
b
c
d
0.1
0
0
0.5
1
1.5
2
znormalizowany czas
Rys. 5.12. Porównanie wpływu wrażliwości odpowiedzi skokowej na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom rezystancji
wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość dla
parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω, d –
wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
Przy zastosowaniu metody przyrostów z wykorzystaniem analitycznej metody obliczeń,
wynik będzie taki sam, jak przy definicyjnym różniczkowaniu w celu uzyskania wrażliwości.
W związku z tym, należy podejrzewać, że metoda obliczania wrażliwości jest obarczona
pewną niedużą niepewnością, nawet jeśli odpowiedź skokowa wykazuje bardzo dużą
zgodność z symulacjami.
Wrażliwość na parametr β, czy też na Rw, w chwili pojawienia się sygnału na wejściu osiąga
najwyższą wartość zależną od wartości Rw (β) (Rys. 5.12) i osiąga wartość maksymalną 0.41
dla Rw=50Ω (w rozważanym w pracy przedziale parametrów). W zależności od wartości
parametrów α oraz ε (Rys. 5.11 i Rys. 5.10) zmienia się szybkość zmniejszania się tej
wartości. Najszybsza zmiana wrażliwości w czasie trwania sygnału jest dla małych
pojemności obciążających i dużych wartości rezystancji.
5.1.2. Wrażliwość na parametry R i C
Zagadnienie wrażliwości na zmiany parametrów RLC wiąże się z dokładnością metod
ekstrakcji parametrów połączeń. Wzory, które mogą być wykorzystywane do obliczeń
parametrów RLC są przedmiotem wielu badań prowadzonych w ośrodkach naukowych na
113
Analiza wrażliwości, wpływ indukcyjności połączeń
świecie [34], [77], [82]. W związku z dynamicznym rozwojem technologii szczególnym
zainteresowaniem cieszy się w ostatnich czasach analiza wpływu indukcyjności. Im mniej
układ jest wrażliwy na niewielkie zmiany parametrów, tym większa może być niedokładność
wykonania ścieżek, ale także określenia modelu analitycznego czy na podstawie symulacji.
Wrażliwość odpowiedzi skokowa na rezystancję połączenia wyrażona wzorem:
S vRs =
(
(
)
)
R ∂v s R ∂ E 0
~ −α ~t
~
−α ~
t
=
−
⋅
−
+ C2 t ,
A
t
e
B
1
e
2
2
vs ∂R vs ∂R β + 1
(5.24)
może zostać wyrażona poprzez pochodną cząstkową uwzględniając zależność zmiennych
równania (5.24) od R:
3BC EBC EF EBC EG EBC EH
=
+
+
.
3S
EF ES EG ES EH ES
(5.25)
EF
EG
EH
1
= 0,
= 0,
=
,
ES
ES
ES U@
(5.26)
Ponieważ:
wrażliwość można wyznaczyć znając wrażliwość na parametr ε (wyznaczony w punkcie
5.1.1).
Otrzymamy wzór na pochodną napięcia:
K
BCV
=
3BC EBC 1
1 K
=
= BCX
3S
EH U@ U@
(5.27)
oraz zależność na wrażliwość na parametr perturbacji:
MNVO =
1 K S
G K
BCX = BCX
= MNXO .
U@
BC BC
(5.28)
Z zależności (5.28) wynika, że zależność na wrażliwość odpowiedzi skokowej na rezystancję
jest równoważna wyznaczonej w punkcie 5.1.1.
Obliczenie wrażliwości odpowiedzi skokowej na zmiany pojemności połączenia z definicji
wrażliwości, będzie polegało na wyznaczeniu pochodnej:
114
Analiza wrażliwości, wpływ indukcyjności połączeń
S vCs =
(
(
)
)
~
C ∂v s C ∂ E0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t .
vs ∂C vs ∂C β + 1
(5.29)
Chcąc skorzystać bezpośrednio z definicji, konieczne jest uwzględnienie, że znormalizowany
czas jest również funkcją pojemności połączenia. Wynika z tego, że obliczenie należy
wykonać z wzoru zawierającego czas nieznormalizowany, który nie zależy od pojemności:
SvCs (t ) =
C ∂vs (t )
=
vs (t ) ∂C
t − LC
t − LC
−α
C ∂ E0 t − LC −α LC
LC
=
e
− B2 ⋅ 1 − e
A2
vs (t ) ∂C β + 1
LC
t − LC
+ C2
LC
(5.30)
.
W celu uproszczenia obliczeń i wykorzystania wzorów na wrażliwości odpowiedzi połączenia
na parametry α, β, ε można zastosować podobne podejście jak przy obliczaniu wrażliwości na
rezystancję. W tym przypadku oprócz parametrów α, β, ε należy dodatkowo uwzględnić
zależność skalowanego czasu ~t od pojemności:
(t − T ) t
t
~
t =
= −1 =
−1 ⇒ ~
t = f (L, C ).
T
T
L ⋅C
(5.31)
W związku z tym, wzór na pochodną napięcia po pojemności połączenia można zapisać:
3BC EBC EF EBC EG EBC EH EBCYZ E[̃
=
+
+
+
,
3D
EF ED EG ED EH ED
E[̃ ED
(5.32)
EF
1 EG
ST EH
S
= ,
=
,
=
,
ED D@ ED 2√^D ED 2√^D
(5.33)
E[̃
^[
^√^D([̃ + 1)
[̃ + 1
=−
=−
=−
.
c
c
ED
2D
2√^D
2√^D
(5.35)
kolejne pochodne:
EBCYZ
1
K
= vCY
`D + P? a &LYZ − FP? [̃a &LYZ − FR? a &LYZ b,
Z =
E[̃
G+1 ?
(5.34)
Ostatecznie pozwala to zapisać wrażliwość na pojemność w postaci:
115
Analiza wrażliwości, wpływ indukcyjności połączeń
̃
1 K
1
K [+1 D
K
K
MdIO ([̃) = e vCL
+
fST vCQ
+ SvCX
g − vCY
h =
Z
D@
2D vC
2√^D
1 Q
[̃ + 1
= MNLO + ,MNO + MdXO 1 −
,
2
vC 2
K
vCY
Z
(5.36)
lub
1 Q
vK Z t
MdIO ([) = MNLO (t) + ,MNO ([) + MdXO ([)1 − CY
.
2
vC 2√^D
(5.37)
Na kolejnych wykresach przedstawiono zależność wrażliwości odpowiedzi skokowej na pojemność wyznaczoną
dla modelu linii transmisyjnej połączenia. Wykres na Rys. 5.13 przedstawia porównanie wrażliwości uzyskanej
w programie PSpice i obliczonej z zależności (5.36). Na dodatkowym wykresie przedstawiono powiększenie osi
przedstawiającej wrażliwość od 0 do 0.5. Wrażliwość na pojemność jest w początkowym czasie trwania sygnału
bardzo duża i dla czasu [ →
osiąga wartość nieskończoną. W przypadku analizy wrażliwości metodą
przyrostową, w zakresie bardzo małych czasów analiza wprowadza błąd związany z wartością przyrostu
parametru i wyznaczonego na tej podstawie czasu opóźnienia T. Dla wszystkich wartości czasu pomiędzy
= √^D a
= j^D(1 + 3k) (3k jest wartością przyrostu parametru, w tym przypadku wartością przyrostu
pojemności C) przyjmie stałą wartość równą 1⁄3k, zostało to zaprezentowane na
Rys. 5.14.
Rys. 5.13. Wrażliwości odpowiedzi skokowej na wartość pojemności połączenia, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) a – wrażliwość obliczona w programie PSpice, b – wrażliwość otrzymana z
zależności (5.37)
116
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.14. Wrażliwości odpowiedzi skokowej na wartość pojemności połączenia, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) a – wrażliwość obliczona w programie PSpice (dC=0.01), b - wrażliwość
otrzymana metodą przyrostów z wyrażenia (3.98) dla dC=0.01, c - wrażliwość otrzymana metodą przyrostów z
wyrażenia (3.98) dla dC=0.05
Metoda korzystająca z obliczania wrażliwości ma w przypadku wrażliwości na pojemność
większą dokładność niż metoda przyrostów dla bardzo małych czasów. Dla czasów
większych niż j^D(1 + 3k) widać bardzo dobrą zgodność wyników otrzymanych metodami
symulacyjnymi i metodą korzystającą z analitycznie wyznaczonej odpowiedzi skokowej. Na
wykresach Rys. 5.16 - Rys. 5.17 przedstawiono zależność wrażliwości odpowiedzi skokowej
na pojemność połączenia. Wrażliwość maleje w funkcji czasu, jest też coraz mniejsza wraz ze
zmniejszaniem się indukcyjności.
117
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.15. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość pojemności połączenia, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości pojemności połączenia C. a – wrażliwość dla
C=1pF, b – wrażliwość dla C=0.5pF, c – wrażliwość dla C=0.2pF, d – wrażliwość dla C=0.1pF
Rys. 5.16. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość pojemności połączenia, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości indukcyjności połączenia L. a – wrażliwość
dla L=5nH, b – wrażliwość dla L=10nH, c – wrażliwość dla L=2.5nH d – wrażliwość dla L=8nH
5.1.3. Wrażliwość na indukcyjność połączeń
Indukcyjność połączeń rozumiana jako indukcyjność modelu linii transmisyjnej połączenia
jest dla połączeń z wyższych warstw połączeń, bardzo ważnym elementem, którego
pominięcie może się wiązać z powstaniem dużych błędów symulacji. W rozdziale 2.2
118
Analiza wrażliwości, wpływ indukcyjności połączeń
przestawiono podstawowe założenia dotyczące uwzględniania indukcyjności w modelowaniu
połączeń. W związku z dużą wagą problemu wpływu indukcyjności na przebieg sygnału,
zagadnienie wrażliwości na indukcyjność połączeń wydaje się być istotnym elementem
analizy połączeń wyższych warstw. Wrażliwość odpowiedzi skokowej na indukcyjność
połączenia można zgodnie z definicyjną zależnością zapisać jako:
S vLs =
(
(
)
(5.38)
)
~
L ∂v s
L ∂ E0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t .
vs ∂L vs ∂L β + 1
Podobnie jak w przypadku pojemności połączeń, znormalizowany czas jest funkcją
indukcyjności, dlatego zgodnie z definicją zależność (5.38) należałoby zapisać jako:
SvLs (t ) =
L ∂vs (t )
=
vs (t ) ∂L
t − LC
t − LC
−α
L ∂ E0 t − LC −α LC
LC
=
e
− B2 ⋅ 1 − e
A2
vs (t ) ∂L β + 1
LC
t − LC
+ C2
LC
(5.39)
.
Podobnie jak poprzednio możliwe jest jednak wykorzystanie poprzednich zależności
określającej wrażliwość na α, β, ε, wyprowadzone dla znormalizowanego czasu jako:
wiedząc, że:
pochodna
3BC EBC EF EBC EG EBC EH EBCYZ E[̃
=
+
+
+
,
3^
EF E^ EG E^ EH E^
E[̃ E^
(5.40)
EF
EG
1 ST D EH
1S D
m ,
m ,
= 0,
=−
=−
E^
E^
2 ^ ^ E^
2^ ^
(5.41)
EBCYZ
K
= vCY
Z,
E[̃
(5.42)
jest wyrażona zależnością (5.34) oraz:
E[̃
D[
D√^D([̃ + 1)
[̃ + 1
=−
=−
=−
,
c
c
E^
2^
2√^D
2√^D
(5.43)
119
Analiza wrażliwości, wpływ indukcyjności połączeń
otrzymamy:
MdnO ([̃) = o−
̃
11 D
K [+1 ^
K
K
m fST vCQ
+ SvCX
g − vCY
p =
Z
2^ ^
2^ vC
K ̃
1 Q
vCY
Z[+1
X
= − ,MNO + MdO 1 −
,
2
vC 2
(5.44)
dla nieznormalizowanego czasu:
MdnO ([)
K
1 Q
vCY
t
Z
X
= − ,MNO ([) + MdO ([)1 −
.
2
vC 2√^D
(5.45)
Zależność (5.45) można przedstawić graficznie na wykresie oraz dokonać jej porównania z
wrażliwością obliczoną w programie PSpice (Rys. 5.17). Wrażliwość obliczona analitycznie
potwierdza wyniki obliczone z symulacji. Wrażliwość w programie PSpice została obliczona
metodą przyrostów, dlatego w chwili t=T będzie zawsze miała wartość 1/3k, gdzie 3k jest
przyrostem dla jakiego obliczamy funkcję wrażliwości. W rzeczywistości funkcja w t=T
przyjmie wartość nieskończoną (Rys. 5.18). Nieprawidłowa wartość wrażliwości w programie
PSpice będzie obliczana dla czasów √^D < [ < j^D(1 + 3k).
Rys. 5.17. Wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla przykładowych
parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) a –
wrażliwość obliczona w programie PSpice, b – wrażliwość otrzymana z zależności (5.70)
Na kolejnych wykresach (Rys. 5.18 - Rys. 5.24) przedstawiono zależność wrażliwości
odpowiedzi skokowej na indukcyjność połączeń dla różnych wartości parametrów modelu
połączenia R, L, C, Rw, C0.
120
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.18. Wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla przykładowych
parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) a –
wrażliwość obliczona w programie PSpice (dC=0.01), b – wrażliwość otrzymana z zależności (5.70), c wrażliwość otrzymana metodą przyrostów z wyrażenia (3.98) dla dC=0.01, c - wrażliwość otrzymana metodą
przyrostów z wyrażenia (3.98) dla dC=0.05
Rys. 5.19. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości pojemności połączenia C. a – wrażliwość dla C=1pF, b – wrażliwość dla
C=0.5pF, c – wrażliwość dla C=0.2pF, d – wrażliwość dla C=0.1pF
121
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.20. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości indukcyjności połączenia L. a – wrażliwość dla L=5nH, b – wrażliwość dla
L=10nH, c – wrażliwość dla L=2.5nH d – wrażliwość dla L=8nH
Rys. 5.21. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości rezystancji połączenia R. a – wrażliwość dla R=12.5Ω, b – wrażliwość dla
R=25Ω, c – wrażliwość dla R=37.5Ω, d – wrażliwość dla R=50Ω
122
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.22. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości rezystancji na wejściu połączenia Rw. a – wrażliwość dla Rw=12.5Ω, b –
wrażliwość dla Rw=25Ω, c – wrażliwość dla Rw=37.5Ω, d – wrażliwość dla Rw=50Ω
Rys. 5.23. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość inducyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości pojemności obciążającej połączenie, a – wrażliwość dla C0=0.1pF, b –
wrażliwość dla C0=0.2pF, c – wrażliwość dla C0=0.5pF, d – wrażliwość dla C0=1pF.
123
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.24. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla równoczesnych zmian R i Rw, a – wrażliwość dla R=Rw=12.5Ω, b – wrażliwość dla R=Rw=25Ω, c –
wrażliwość dla R=Rw=37.5Ω, d – wrażliwość dla R=Rw=50Ω.
Analiza wrażliwości odpowiedzi skokowej, dla której przykładowe wykresy przedstawiono
powyżej, pozwala sformułować wniosek, że wrażliwość odpowiedzi skokowej na
indukcyjność połączenia w początkowym okresie trwania sygnału jest bardzo duża, jednak po
upływie czasu T (czyli 2 T z punktu widzenia załączenia sygnału) jest w rozważanym
zakresie parametrów mniejsza od jeden. Bardzo duże wartości wrażliwości dla czasów
bliskich T są związane z wpływem indukcyjności na wartość T i dla punktu na osi czasu
równym t=T osiągają wartość nieskończoną. W dalszym przebiegu sygnału zmiana czasu
opóźnienia spowodowana zmianą indukcyjności połączenia nie ma już takiego znaczenia. W
związku z tym, z punktu widzenia wyznaczania czasów przejścia przez próg napięciowy,
prawidłowe określenie indukcyjności modelu, wydaje się bardzo istotne.
5.1.4. Wrażliwość na parametry geometryczne połączeń
Ważnym zagadnieniem w projektowaniu obwodów drukowanych jest wrażliwość odpowiedzi
na zmianę parametrów geometrycznych połączeń. W przypadku linii mikropaskowej
przedstawionej na Rys. 2.6 możliwe jest uzależnienie wartości modelu RLC od wartości
parametrów geometrycznych, takich jak szerokość W, grubość paska h, długość L oraz
odległość od płaszczyzny masy H.
Zależność wrażliwości na szerokość linii mikropaskowej można wyrazić wzorem:
124
Analiza wrażliwości, wpływ indukcyjności połączeń
S vWs =
(
(
)
)
~
W ∂v s W ∂ E 0
~ ~
~
=
A2 t e −α t − B2 ⋅ 1 − e −α t + C2 t ,
vs ∂W v s ∂W β + 1
(5.46)
w którym stałe G, F, P? , R? , D? , [̃, jako zmienne zależne od parametrów RLC, są też zależne od
rozmiarów geometrycznych połączeń. Znając zależności analityczne na wrażliwość na
parametry RLC możemy obliczyć wrażliwość na parametry geometryczne np. szerokość
ścieżki W, korzystając z zależności na pochodną napięcia postaci:
3BC EBC ES EBC E^ EBC ED
=
+
+
.
3s ES Es E^ Es ED Es
(5.47)
Kolejne pochodne przyjmą postać:
ES
∂ ρd
ρd
=
u x=− ? ,
Es ∂W Wh
W h
yz
y{
}&
= |} oε
|
+
?
(5.48)
p = dla s ≥ ℎ2
' , ?1
(5.49)
lub
h
ε
π
,1
−
0.0543
1
EC
∂ W
2H
+
=
+ 1.47 = dla s < ℎ2
Es ∂W H
H
2H 2H 2H
ln 1 +
+
, + 21
h
h h
(5.50)
oraz
E^
E
=
o5.0832 ∙ 10& 3
Es Es
8
∙ ln
+
1.25ℎ
4s
s + ,1 + ln
1
ℎ
s+
1.25ℎ
4s
,1 + ln ℎ 1p.
4
(5.51)
125
Analiza wrażliwości, wpływ indukcyjności połączeń
Ostatecznie:
?
12.57s
0.4ℎ
s + 0.4ℎ ,ln ,
1 + 11 − 32ℎ?
&
5.0832
∙
10
3
,
+
11
ℎ
E^
s
=
.
?
Es s + 0.4ℎ ,ln ,12.57s 1 + 11
12.57s
s + 0.4ℎ ,ln ,
1 + 11 + 32ℎ?
ℎ
ℎ
Pochodne
(5.40).
yNO
yV
,
,
yNO yNO
yI
yn
(5.52)
, są natomiast określone odpowiednio zależnościami (5.27), (5.32) i
W związku z powyższym wzór na wrażliwość połączenia na szerokość ścieżki przyjmie
postać:
Sd} =
3BC s
EBC ES EBC E^ EBC ED s
=u
+
+
x
3s BC
ES Es E^ Es ED Es BC
(5.53)
Poniżej przedstawiono przykładowy wykres (Rys. 5.25) ilustrujący wrażliwość odpowiedzi
skokowej na szerokość połączenia. Największą wrażliwość na parametry połączenia ma
sygnał w początkowym czasie trwania. W dalszej części przebiegu wrażliwość znacznie
maleje. Jest to spowodowane zmianami indukcyjności i pojemności połączenia wraz ze
zmianą parametrów geometrycznych. Zmiany L i C natomiast wpływają na czas opóźnienia
sygnału (czas po którym sygnał pojawi się sie na bramce obciążającej).
Rys. 5.25. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na szerokość ścieżki, dla
przykładowych parametrów połączeń a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2mm, b-
C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=600µm, d=2mm, c- C0=0.5pF i Rw=25Ω, W=4µm, h=1µm, H=300µm,
d=2mm, d- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2.4mm.
126
Analiza wrażliwości, wpływ indukcyjności połączeń
Kolejnym parametrem geometrycznym na który zbadano wrażliwość jest odległość ścieżki od
płaszczyzny masy H:
Pochodne
yNO
yV
Sd =
,
,
yNO yNO
yI
yn
3BC
EBC ES EBC E^ EBC ED
=u
+
+
x .
3 BC
ES E E^ E ED E BC
(5.54)
, są określone odpowiednio zależnościami (5.27), (5.32), (5.40),
natomiast pochodne parametrów modelu po parametrach geometrycznych:
ES
∂ ρd
=
u x = 0.
E ∂H Wh
lub
(5.55)
h
EC
∂ ¡W − 2
2π
¤
ℎ
=
ε
+
£ , dla s ≥ 2
E ∂H H
2H 2H 2H
ln 1 +
+
, + 21
h
h h
¢
1
h 2π 2 2H ,2H + 21 + 4H
+2
h
h h
h ¤
h?
EC ¡ W − 2
= ε −
−
£
?
E
H
M
¢
dla s ≥ ℎ2,
h
π ,1 − 0.0543 2H1
∂ W
EC
+
=
+ 1.47 dla s < ℎ2 ,
E ∂H H
2H 2H 2H
ln 1 +
+
, + 21
h
h h
gdzie M= ¨ , ¨ + 21 ,1 + ¨ 1 + , ¨ + ¨ 1 ln 1 +
? ?
?
©
©
?
¨
+
,
? ?
¨
¨
+ 21
(5.56)
(5.57)
(5.58)
?
127
Analiza wrażliwości, wpływ indukcyjności połączeń
h
2H 2H 2H
0.0543 ? ln 1 +
+
, + 21
h
h h
2H
EC
W
= −
+
?
Es H ?
2H 2H 2H
ln 1 +
+
, + 21
h
h h
h
4H
1
2 2H 2H
π ,1 − 0.0543 1 , + 21 + 2 + 2
2H h h h
h
h
dla s < ℎ2
−
M
(5.59)
oraz
E^
E
=
o5.0832 ∙ 10& 3
Es Es
8
∙ ln
+
1.25ℎ
4s
s + ,1 + ln
1
ℎ
s+
1.25ℎ
4s
,1 + ln ℎ 1p.
4
(5.60)
Ostatecznie:
E^
= 5.0823 ∙ 10& 3
E
1.25ℎ
4s
s + ,1 + ln
1
8
ℎ
−
?
1.25ℎ
4s
4
s + ,1 + ln ℎ 1
∙
.
1.25ℎ
4s
s
+
,1
+
ln
1
8
ℎ
+
1.25ℎ
4s
4
s + ,1 + ln ℎ 1
128
(5.61)
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.26. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające odległość pomiędzy ścieżką a
płaszczyzną masy dla przykładowych parametrów połączeń a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm,
H=300µm, d=2mm, b- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=600µm, d=2mm, c- C0=0.5pF i Rw=25Ω,
W=4µm, h=1µm, H=300µm, d=2mm, d- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2.4mm
Wrażliwość odpowiedzi na odległość pomiędzy ścieżką, a płaszczyzną masy przyjmuje małe
wartości (do ok 2%) i największe wartości przyjmuje dla czasów t=T (Rys. 5.26). Analizując
zależności wrażliwości od parametrów można powiedzieć, że zależność zmienia się w
niewielkim stopniu przy zmianie parametrów.
5.2. Wrażliwość odpowiedzi na zbocze narastające
Podobnie jak w przypadku odpowiedzi na skok jednostkowy, dla odpowiedzi na zbocze
narastające wrażliwość można obliczać ze wzoru na definicję wrażliwości (5.1). W kolejnych
podrozdziałach zostanie omówiona wrażliwość połączeń względem różnych parametrów
połączeń, ze szczególnym zwróceniem uwagi na wpływ indukcyjności.
5.2.1. Wrażliwość na parametry określające straty i parametry we/wy
Podobnie jak dla odpowiedzi skokowej, w pierwszej części rozdziału, zostanie pokazana
wrażliwość odpowiedzi skokowej połączenia małostratnego na wartość współczynnika
perturbacji:
129
Analiza wrażliwości, wpływ indukcyjności połączeń
S vε =
r
ε
Sv
r
ε ∂v r ε ∂ E 0
=
v r ∂ε v r ∂ε (β + 1)Tr
~
C2 ~ 2
~
~
−α t
+ K 2
2 t − B2 t + (K1 t − K 2 ) e
dla ~
t ≤ Tr / T ,
~
~
~
K1~
t e −α t T2 + C 2 ⋅ Tr t − K 2 ⋅ T2 − K1 ⋅ Tr eαTr e −α t
E0
ε ∂
2
=
⋅
C
T
2
r
v r ∂ε (β + 1)Tr −
− B2 ⋅ Tr
2
~
dla t > Tr / T ,
(
)
(5.62)
gdzie ~t = (t − T ) / T . Wzór na wrażliwość odpowiedzi skokowej na parametr perturbacji
przyjmie więc postać:
S vεr =
E0
C2′ ε ~ 2
~ ( ′ ~
−α ~
t
′
′
)
t
−
B
t
+
K
t
−
K
e
+ K 2′ ε
2
1
2
ε
ε
ε
vr (β + 1)Tr 2
~
dla t ≤ Tr / T ,
ε
lub
S vεr
~
~ ~
~
K1′ε ~
t e −α t T2 + K1t e −α t T2′ε + C2′ ε Tr t +
E0
ε
=
2
~
′
C
T
vr (β + 1)Tr − K ′ T + K T ′ − K ′ ⋅ T eαTr e −α t − 2ε r − B′ T
2ε 2
2 2ε
1ε
r
ε r
2
~
dla t > T / T ,
(
)
(5.63)
r
gdzie:
K1′ε = −
A2′ ε
α
,
B′ − K1′ε
K 2′ ε = 2ε
,
α
T2′ε = 0.
Natomiast A2′ε , B2′ε , C2′ε są odpowiednio dane zależnościami (5.4) – (5.6).
Podstawiając zależność (5.66) otrzymamy:
130
(5.64)
(5.65)
(5.66)
Analiza wrażliwości, wpływ indukcyjności połączeń
S vεr =
~
E0
C2′ ε ~ 2
~
~
t − B2′ ε t + (K1′ε t − K 2′ ε ) e −α t + K 2′ ε
vr (β + 1)Tr 2
~
dla t ≤ Tr / T ,
ε
lub
~
S vεr
(
)
~
~
K1′ε ~
t e −α t T2 + C 2′ ε Tr t − K 2′ ε T2 − K1′ε ⋅ Tr eαTr e −α t
E0
ε
=
2
vr (β + 1)Tr − C2′ ε Tr − B′ T
2ε r
2
dla ~
t > Tr / T .
(5.67)
Poniżej (Rys. 5.27 - Rys. 5.28) przedstawiono porównanie wyników uzyskanych z zależności
(5.67) z wrażliwością otrzymaną w programie PSpice, obliczoną podobnie jak dla odpowiedzi
skokowej.
Wykresy (Rys. 5.27 oraz Rys. 5.28) pokazują dużą zgodność wrażliwości obliczonej metodą
przyrostową w PSpice oraz bezpośrednio z definicji, opierając się na przybliżonym wzorze na
odpowiedź na zbocze narastające . Metoda przyrostowa daje wyniki pokrywające się z
wykresem obliczonym z definicji. Stąd wniosek, że różnica pomiędzy wykresami ze PSpice i
z obliczeń odpowiedzi z wykorzystaniem metody wielu skal nie wynika z różnicy obliczania
wrażliwości, tylko z metody obliczania napięcia na wyjściu połączenia.
Rys. 5.27. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr perturbacji
otrzymany z zależności (5.67) z wrażliwością otrzymaną w programie PSpice, dla przykładowych parametrów
połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=1pF i Rw=25Ω, co oznacza ε=0.354,
α=10, β=0.354), a – wrażliwość obliczona w programie PSpice, b – wrażliwość obliczona z zależności (5.67)
131
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.28. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr perturbacji
otrzymany z zależności (5.67) z wrażliwością otrzymaną w programie PSpice, dla przykładowych parametrów
połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354,
α=2, β=0.354), a – wrażliwość obliczona w programie PSpice, b – wrażliwość obliczona z zależności (5.67)
Korzystając z zależności (5.7) możemy także przedstawić zależność wrażliwości na parametr
ε dla wybranego zestawu parametrów (Rys. 5.29 – Rys. 5.31). Wykresy przedstawiono dla
~
zmiennej znormalizowanej t w celu łatwiejszego porównywania wykresów o różnych
parametrach stałych czasowych w dalszej części pracy.
Rys. 5.29. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr perturbacji, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom
rezystancji połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla
parametru perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d –
wrażliwość dla parametru perturbacji ε=0.708 => R=50Ω
132
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.30. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr perturbacji, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom
pojemności obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 =>
C0=0.5pF, c – wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
Rys. 5.31. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr perturbacji, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom
rezystancji wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość
dla parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω,
d – wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
Z wykresów (Rys. 5.29–Rys. 5.31) widać jak przedstawia się zależność wrażliwości na
parametr perturbacji w zależności od przyjętych parametrów obwodu. Widać, że wartość
wrażliwości nie przekracza 0.4 oraz wrażliwość na parametr perturbacji wzrasta im większa
133
Analiza wrażliwości, wpływ indukcyjności połączeń
jest rezystancja (Rys. 5.29), większe jest obciążenie (Rys. 5.30) lub mniejsza jest rezystancja
wyjściowa źródła (Rys. 5.31).
Kolejnym parametrem na który zostanie zbadana wrażliwość odpowiedzi na sygnał
narastający, podobnie jak przy odpowiedzi skokowej jest parametr α , zawierający
pojemność wejściową bramki obciążającej. Podobnie jak dla rezystancji połączenia zależność
na wrażliwość napięcia na zbocze narastające można obliczyć z wzoru:
Svεr =
ε
Sv r
ε ∂vr ε ∂ E0
=
vr ∂ε vr ∂ε (β + 1)Tr
~
C2 ~ 2
~
~
−α t
−
+
−
+
t
B
t
(
K
t
K
)
e
K
2
1
2
2
2
~
dla t ≤ Tr / T ,
~
~
K1~
t e −α t T2 + C2 ⋅ Tr ~
t − K 2 ⋅ T2 − K1 ⋅ Tr eαTr e −α t
E0
ε ∂
=
2
C
⋅
T
vr ∂ε (β + 1)Tr − 2 r − B ⋅ T
r
2
~
dla t > Tr / T .
(
)
(5.68)
gdzie ~t = (t − T ) / T . Wzór na wrażliwość odpowiedzi skokowej na parametr perturbacji
przyjmie więc postać:
Svαr =
E0 C2′ α ~ 2
~ ( ′ ~
~( ~
t
t
−α ~
−α ~
′
′
)
)
t
−
B
t
+
K
t
−
K
e
−
t
K
t
−
K
e
+ K 2′ α
2
1
2
1
2
α
α
α
vr (β + 1)Tr 2
~
dla t ≤ Tr / T ,
α
lub
Svαr
~
~
~
K1′α ~
t e −α t T2 − ~
t K1~
t e −α t T2 + K1~
t e −α t T2′α + C2′ α Tr ~
t +
~
E0
α
=
− K 2′ α T2 + K 2T2′α − K1′α Tr eαTr − Tr K1Tr eαTr e −α t +
vr (β + 1)Tr
C2′ α Tr2
+ ~
αTr −α~t
e
−
− B2′ α Tr
t K 2T2 − K1Tr e
2
~
dla t > Tr / T ,
(
(
)
)
(5.69)
gdzie:
K1′α = −
134
A2′ α α − A2α
α2
,
(5.70)
Analiza wrażliwości, wpływ indukcyjności połączeń
K 2′ α =
(B2′ α − K1′α )α − (B2 − K1 ) ,
α2
T2′ε = Tr eαTr ,
(5.71)
(5.72)
natomiast A2′α , B2′α C2′α są odpowiednio dane zależnościami (5.4) - (5.6).
Porównanie wrażliwości otrzymanej ze wzoru (5.69) oraz symulacji wykonanych w
programie PSpice pozwala potwierdzić właściwość stosowania przybliżonego wzoru na
napięcie wyjściowe do obliczeń wrażliwości (Rys. 5.32). Na kolejnych wykresach (Rys. 5.33
– Rys. 5.35) przedstawiono wpływ zmian parametrów na wrażliwość odpowiedzi na α.
Rys. 5.32. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr α, związany
bezpośrednio z pojemnością bramki wyjściowej, otrzymany z zależności (5.69) z wrażliwością otrzymaną w
programie PSpice, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354), a – wrażliwość obliczona w programie
PSpice, b – wrażliwość obliczona z zależności (5.69)
135
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.33. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr α, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom
pojemności obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 =>
C0=0.5pF, c – wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
Rys. 5.34. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr α, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom
rezystancji połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla
parametru perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d –
wrażliwość dla parametru perturbacji ε=0.708 => R=50Ω
136
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.35. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr α, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom
rezystancji wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość
dla parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω,
d – wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
Z przedstawionych wykresów wynika, że wrażliwość na α najbardziej zależy od wartości α i
jest największa, dla najmniejszych wartości parametru, czyli dla największych wartości
pojemności obciążenia (Rys. 5.33). W skrajnym przypadku (dla C0=1p, czyli C0=C) wartość
dla przedziału czasu odpowiadająca pierwszej fali wędrownej nie spada poniżej 0.4 dla
danych przedstawionych na wykresie oraz osiąga najmniejszą wartość 0.544 w najgorszym
przypadku: α=1, β=1, ε=1, Tr=0.5T. Najmniejsza zależność wrażliwości od zmian parametru
widoczna jest na wykresie Rys. 5.35, czyli dla zmian rezystancji wejściowej wyznaczanej
przez zmianę parametru β. Zależność wrażliwości na parametr α od parametru perturbacji ε
(Rys. 5.34) pokazuje, że im większa rezystancja połączenia tym wrażliwość jest większa.
W kolejnej części rozdziału zostanie zbadana wrażliwość odpowiedzi na sygnał narastający,
na parametry bramki wejściowej – rezystancję wyjściową bramki Rw oraz czas narastania Tr.
Zmiany rezystancji bramki odpowiadają wprost proporcjonalnie zmianom parametru β, który
można potraktować jak Rw skalowane przez impedancję linii bezstratnej Z0, dla ułatwienia
zapisu zostanie więc przedstawiona zależność wrażliwości na ten parametr. Zależność na
wrażliwość napięcia na zbocze narastające na parametr β można obliczyć bezpośrednio z
wzoru:
137
Analiza wrażliwości, wpływ indukcyjności połączeń
Svβ =
r
~
β ∂vr β ∂ E0 C2 ~ 2
=
t − B2 ~
t + (K1~
t − K 2 ) e −α t + K 2
(
vr ∂β vr ∂β β + 1)Tr 2
dla ~
t ≤ Tr / T ,
Svβ
r
(
)
~ −α~t
E0
C T2
β ∂
~
αT −α ~t
=
− 2 r − B2Tr
K1t e T2 + C2Tr t − K 2T2 − K1Tr e r e
vr ∂β (β + 1)Tr
2
(5.73)
dla ~
t > Tr / T ,
gdzie ~t = (t − T ) / T . Wzór na wrażliwość odpowiedzi skokowej na parametr perturbacji
przyjmie więc postać:
Svβ
r
S vβ
r
~
C2′ β ~ 2
~
~
t − B2′ β t + K1′β t − K 2′ β e −α t + K 2′ β
β E0 2
+
=
(β + 1)
vr Tr
~
C2 ~ 2
t − B2 ~
t + (K1~
t − K 2 ) e −α t + K 2
2
−
2
(β + 1)
dla ~
t ≤ Tr / T ,
(
)
(
)
C2′ β Tr2
~
~
αTr −α ~t
−α ~
t
′
′
′
′
−
− B2′ β Tr
β E0 K1β t e T2 + C2 β Tr t − K 2 β T2 − K1β Tr e e
2
=
+
vr Tr
(β + 1)
C2Tr2
~ −α~t
~
αTr −α ~t
K1t e T2 + C2Tr t − K 2T2 − K1Tr e
e
−
− B2Tr
2
−
2
(β + 1)
~
dla t > Tr / T ,
(
(5.74)
)
gdzie:
K1′β = −
K 2′ β =
138
A2′ β
α
,
(B2′ β − K1′β ) ,
α
(5.75)
(5.76)
Analiza wrażliwości, wpływ indukcyjności połączeń
(5.77)
T2′β = 0,
natomiast A2′ β , B2′ β , C2′ β są odpowiednio dane zależnościami (5.18) - (5.19).
Porównując wrażliwość otrzymaną w PSpice i ze wzoru (5.74) widać bardzo dobrą zgodność
dla czasów znajdujących się w obszarze t-T<Tr, zmniejszającą się wraz ze wzrostem czasu.
Ponieważ obliczenia dla wzoru na napięcie z wykorzystaniem metody wielu skal metodą
przyrostów pokrywają się z analitycznym wyznaczeniem wrażliwości poprzez obliczenie
pochodnej napięcia, można wnioskować, że różnice w obliczonej wrażliwości wynikają z
przybliżeń w zastosowanej metodzie perturbacji. Wrażliwość na β osiąga największą wartość
na początku przedziału czasu i nieznacznie maleje wraz ze wzrostem czasu (Rys. 5.36 – Rys.
5.39). Największy spadek można zanotować dla największych wartości rezystancji
połączenia. Wrażliwość na β najmniej zależy od zmian wartości parametru α (Rys. 5.38), przy
czym w obu przypadkach wartość początkowa wrażliwości (dla t=T) nie zależy od tych
parametrów. Wartość początkowa zależy natomiast od zmian (Rys. 5.37) i jest większa im
większe Rw, w bardzo małym stopniu natomiast dla różnych Rw różni się szybkość z jaką
wartość wrażliwości maleje. Dla rozważanego w symulacjach przedziału danych największa
wrażliwość (dla t=T oraz Rw=50Ω) wynosi 0.41.
0.3
wrazliwosc
a
b
0.2
0.1
0
0
53.033
106.066
159.099
212.132
czas [ps]
Rys. 5.36. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr β, związany
bezpośrednio z rezystancją bramki wejściowej, otrzymany z zależności (5.74) z wrażliwością otrzymaną w
programie PSpice, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354), a – wrażliwość obliczona w programie
PSpice, b – wrażliwość obliczona z zależności (5.74)
139
Analiza wrażliwości, wpływ indukcyjności połączeń
0.5
τr
0.5
1
wrazliwosc
0.4
0.3
0.2
a
b
c
d
0.1
0
0
0.5
1
1.5
2
znormalizowany czas
Rys. 5.37. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β, odpowiadającym zmianom rezystancji
wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 => Rw=12.5Ω, b – wrażliwość dla
parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru perturbacji β=0.631 => Rw=37.5Ω, d –
wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
Rys. 5.38. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α, odpowiadającym zmianom pojemności
obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b – wrażliwość dla parametru α =2 => C0=0.5pF, c –
wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość dla parametru α =10 => C0=0.1pF
140
Analiza wrażliwości, wpływ indukcyjności połączeń
wrazliwosc
0.3
τr
1
0.2
0.1
0
a
b
c
d
0
0.5
1
1.5
2
znormalizowany czas
Rys. 5.39. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na parametr β, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε, odpowiadającym zmianom rezystancji
połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 => R=12.5Ω, b – wrażliwość dla parametru
perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji ε=0.631 => R=37.5Ω, d – wrażliwość dla
parametru perturbacji ε=0.708 => R=50Ω
Dodatkowym parametrem zależnym od bramki wejściowej jest czas narastania sygnału
wejściowego. Zależność na wrażliwość napięcia na zbocze narastające na parametr Tr można
obliczyć z wzoru:
~
Tr ∂vr Tr ∂ E0
C2 ~ 2
~
~
−α t
=
t
−
B
t
+
(
K
t
−
K
)
e
+
K
2
1
2
2
(
vr ∂Tr vr ∂Tr β + 1)Tr 2
~
dla t ≤ Tr / T ,
~
~
αTr −α ~t
−α t
K1~
t
e
T
+
C
T
t
−
K
T
−
K
T
e
e
2
2 r
2 2
1 r
Tr ∂ E0
=
2
vr ∂Tr (β + 1)Tr − C2Tr − B T
2 r
2
~
dla t > Tr / T .
SvTr =
r
SvTr
r
(
)
(5.78)
gdzie ~t = (t − T ) / T . Wzór na wrażliwość odpowiedzi skokowej na parametr perturbacji
przyjmie więc postać:
141
Analiza wrażliwości, wpływ indukcyjności połączeń
~
v
C2 ~ 2
~
~
−α t
+ K 2 = − r = −1
2 t − B2 t + (K1t − K 2 ) e
vr
~
dla t ≤ Tr / T ,
~
~
αTr −α ~t
−α t
K ~
t
e
T
+
C
T
t
−
K
T
−
K
T
e
e
1
2
2
r
2
2
1
r
1
+
T C2Tr2
− B2Tr
E0
1
r −
=
2
vr (β + 1)Tr
α Tr
αTr −α ~t
t
−α ~
K ~
t e T2′Tr − K 2T2′Tr − K1e
− αK1Tr e
e
+ 1
~
−C T − B +C t
2 r
2
2
~
dla t > Tr / T ,
SvTr = −
r
1 E0
vr (β + 1)Tr
(
SvTr
r
(
)
)
(5.79)
gdzie:
T2′Tr = −αeαTr
(5.80)
Rys. 5.40. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na czas narastania sygnału
wejściowego Tr, otrzymany z zależności (5.79) z wrażliwością otrzymaną w programie PSpice, dla
przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i
Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354), a – wrażliwość obliczona w programie PSpice, b – wrażliwość
obliczona z zależności (5.79)
Wrażliwość na czas narastania, w przedziale czasu odpowiadającej narastaniu sygnału
wymuszenia jest stała i równa 1. Następnie spada do wartości bliskich zero. Na wykresie
przedstawionym na Rys. 5.40, widać dobrą zgodność dla wrażliwości obliczonej ze wzoru
(5.79) i w programie PSpice. Z przedstawionych wykresów wynika więc, że wrażliwość
sygnału na zmianę czasu narastania jest szczególnie istotna w tym przedziale, dla większych
142
Analiza wrażliwości, wpływ indukcyjności połączeń
czasów wpływ czasu narastania na zmiany sygnału są znacznie mniejsze. Na kolejnych
wykresach przedstawiono zależność zmian wrażliwości na czas narastania, w zależności od
wartości pozostałych parametrów obwodu (Rys. 5.42 – Rys. 5.44).
Rys. 5.41. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na czas narastania sygnału
wejściowego Tr, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru Tr,
odpowiadającym zmianom czasom narastania napięcia na wejściu połączenia. a – wrażliwość dla Tr =0.5ps, b –
wrażliwość dla Tr =10ps, c – wrażliwość dla Tr =20ps, d – wrażliwość dla Tr=50ps
Rys. 5.42. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na czas narastania sygnału
wejściowego Tr, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru β,
odpowiadającym zmianom rezystancji wyjściowej źródła. a – wrażliwość dla parametru perturbacji β=0.177 =>
Rw=12.5Ω, b – wrażliwość dla parametru perturbacji β=0.354 => Rw=25Ω, c – wrażliwość dla parametru
perturbacji β=0.631 => Rw=37.5Ω, d – wrażliwość dla parametru perturbacji β=0.708 => Rw=50Ω
143
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.43. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na czas narastania sygnału
wejściowego Tr, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru α,
odpowiadającym zmianom pojemności obciążenia. a – wrażliwość dla parametru α =1 => C0=1pF, b –
wrażliwość dla parametru α =2 => C0=0.5pF, c – wrażliwość dla parametru α =4 => C0=0.25pF, d – wrażliwość
dla parametru α =10 => C0=0.1pF
Rys. 5.44. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na czas narastania sygnału
wejściowego Tr, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH,
Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości parametru ε,
odpowiadającym zmianom rezystancji połączenia. a – wrażliwość dla parametru perturbacji ε=0.177 =>
R=12.5Ω, b – wrażliwość dla parametru perturbacji ε=0.354 R=25Ω, c – wrażliwość dla parametru perturbacji
ε=0.631 => R=37.5Ω, d – wrażliwość dla parametru perturbacji ε=0.708 => R=50Ω
Na wykresach (Rys. 5.42 i Rys. 5.44) widać, że wrażliwość na czas narastania sygnału
wejściowego praktycznie nie zależy od wartości parametru perturbacji oraz parametru β, co
oznacza, że jest niezależna od zmian rezystancji połączenia oraz zmian rezystancji
144
Analiza wrażliwości, wpływ indukcyjności połączeń
wyjściowej bramki zasilającej połączenie. Zależność od parametru α przebiega w taki
sposób, że im mniejsza pojemność obciążająca połączenie, tym szybciej zmniejsza się
wrażliwość na czas narastania.
5.2.2. Wrażliwość na parametry R i C
Podobnie jak dla odpowiedzi skokowej, wyznaczona zostanie wrażliwość na parametry
modelu linii transmisyjnej. Wrażliwość odpowiedzi na zbocze narastające na rezystancję
połączenia wyrażona jest wzorem:
S vRr =
R ∂vr
vr ∂R
(5.81)
i może, w celu uniknięcia dodatkowych obliczeń zostać wyrażona poprzez pochodną
cząstkową uwzględniając zależność F, G, H od R
3Bª EBª EF EB« EG EB« EH
=
+
+
.
3S
EF ES EG ES EH ES
(5.82)
Pochodne F, G, H po R wyznaczone zostały w równaniu (5.26), i w związku z tym wrażliwość
na rezystancję połączenia przyjmie postać:
MNV¬ =
1 K S
G K
BªX = BªX
= MNX­ .
U@
B« B«
(5.83)
Z zależności (5.83) wynika, że zależność na wrażliwość odpowiedzi narastającej na
rezystancję jest równoważna wrażliwości na parametr perturbacji. Wykresy i wnioski z
rozdziału 5.2.1 dla wrażliwości na parametr perturbacji odpowiadają więc bezpośrednio
wrażliwości na rezystancję połączenia.
Obliczenie wrażliwości odpowiedzi na zbocze narastające na zmiany pojemności połączenia
można wyznaczyć z definicji:
SvCs =
C ∂vs
.
vs ∂C
(5.84)
Jeśli podobnie jak w analizie odpowiedzi skokowej, będziemy korzystać ze skalowanego
czasu, to konieczne jest uwzględnienie zależności czasu opóźnienia, przez który został
145
Analiza wrażliwości, wpływ indukcyjności połączeń
przeskalowany czas, od pojemności. W związku z tym wzór na pochodną napięcia po
pojemności połączenia można zapisać:
3B« EB« EF EB« EG EB« EH EB«YZ E[̃
=
+
+
+
.
3D
EF ED EG ED EH ED
E[̃ ED
(5.85)
Pochodne F, G, H, [̃ po C zostały wyznaczone we wzorze (5.33) oraz (5.35), natomiast
pochodne napięcia na F, G, H, odpowiednio w rozdziale poprednim.
Ostatecznie wrażliwość na pojemność można zapisać w postaci:
̃
1 K
1
K [+1 D
K
K
MdI¬ ([̃) = e vCª
+
fST vªQ
+ SvªX
g − v«Y
h =
Z
D@
2D v«
2√^D
1 Q
[̃ + 1
= MNL­ + ,MN¬ + MdX¬ 1 −
,
2
v« 2
K
vªY
Z
(5.86)
lub
MdI¬ ([)
=
MNL­ (t)
K
1 Q
v«Y
t
Z
X
+ ,MN­ ([) + Md­ ([)1 −
.
2
vª 2√^D
(5.87)
Rys. 5.45. Wrażliwości odpowiedzi na zbocze narastające na wartość pojemności połączenia, dla przykładowych
parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) a – wrażliwość obliczona w programie PSpice, b – wrażliwość otrzymana z
zależności (5.87)
146
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.46. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość pojemności
połączenia, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF,
C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości pojemności połączenia C. a –
wrażliwość dla C=0.1pF, b – wrażliwość dla C=0.2pF, c – wrażliwość dla C=0.5pF, d – wrażliwość dla C=1pF.
Rys. 5.47. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość pojemności
połączenia, dla przykładowych parametrów połączeń o dużej wartości indukcyjności (Rt=25Ω, Lt=5nH, Ct=1pF,
C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2, β=0.354) dla różnych wartości indukcyjności połączenia L. a –
wrażliwość dla L=2.5nH, b – wrażliwość dla L=5nH, c – wrażliwość dla L=8nH d – wrażliwość dla L=10nH.
Wrażliwość odpowiedzi połączenia na pojemność połączenia przedstawiono na wykresach
powyżej. Wrażliwość bardzo silnie zależy od parametrów połączenia i jest bardzo duża w
początkowym okresie trwania sygnału.
147
Analiza wrażliwości, wpływ indukcyjności połączeń
5.2.3. Wrażliwość na indukcyjność połączeń
Rzeczywiste obwody zasilane są ze źródeł, które można modelować sygnałem narastającym,
co zmniejsza nachylenie sygnału wyjściowego. Z drugiej strony duża indukcyjność połączeń
przyspiesza czas osiągnięcia wartości równej sygnałowi wymuszającemu. W rozdziale dla
odpowiedzi na zbocze narastające zaprezentowany zostanie sposób obliczenia wrażliwości na
indukcyjność połączenia, wnioski płynące z analizy wrażliwości oraz przykładowe wykresy
dla typowych parametrów połączeń. Wzór definicyjny na wrażliwość odpowiedzi połączenia
na indukcyjność ma postać:
SvLr =
L ∂vr
.
vr ∂L
(5.88)
Pochodna napięcia wyjściowego po czasie może zostać wyznaczona z zależności:
3Bª EB« EF EBª EG EB« EH EB«YZ E[̃
=
+
+
+
,
3^
EF E^ EG E^ EH E^
E[̃ E^
pochodne F, G, H, [̃ po L są dane zależnościami (5.41) i (5.35).
(5.89)
Ostatecznie wrażliwość na indukcyjność połączeń przyjmie postać:
Mdn¬ ([̃) = o−
̃
11 D
K [+1 ^
K
K
m fST vªQ
+ SvªX
g − vªY
p =
Z
2^ ^
2^ v«
1 Q
v K Z [̃ + 1
= − ,MN­ + MdX­ 1 − ªY
,
2
v« 2
(5.90)
dla nieznormalizowanego czasu:
1 Q
vK Z t
Mdn­ ([) = − ,MN¬ ([) + MdX¬ ([)1 − ªY
.
2
v« 2√^D
(5.91)
Poniżej przedstawiono przykładowe wykresy ilustrujące wpływ wartości parametrów modelu
połączenia R, L, C, Rw, C0, na zależność wrażliwości odpowiedzi skokowej na indukcyjność
połączeń.
148
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.48. Wrażliwości odpowiedzi na zbocze narastające na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) a – wrażliwość obliczona w programie PSpice, b – wrażliwość otrzymana z zależności (5.70)
Rys. 5.49. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość indukcyjności
połączenia, dla przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości pojemności połączenia C. a – wrażliwość dla C=0.1pF, b –
wrażliwość dla C=0.2pF, c – wrażliwość dla C=0.5pF, d – wrażliwość dla C=1pF.
149
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.50. Porównanie wpływu wrażliwości odpowiedzi skokowej na wartość indukcyjności połączenia, dla
przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co oznacza ε=0.354, α=2,
β=0.354) dla różnych wartości indukcyjności połączenia L. a – wrażliwość dla L=2.5nH, b – wrażliwość dla
L=5nH, c – wrażliwość dla L=8nH d – wrażliwość dla L=10nH
Rys. 5.51. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość indukcyjności
połączenia, dla przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości rezystancji połączenia R. a – wrażliwość dla R=12.5Ω, b –
wrażliwość dla R=25Ω, c – wrażliwość dla R=37.5Ω, d – wrażliwość dla R=50Ω
150
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.52. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość indukcyjności
połączenia, dla przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości rezystancji na wejściu połączenia Rw. a – wrażliwość dla
Rw=12.5Ω, b – wrażliwość dla Rw=25Ω, c – wrażliwość dla Rw=37.5Ω, d – wrażliwość dla Rw=50Ω
Rys. 5.53. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość inducyjności
połączenia, dla przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354) dla różnych wartości pojemności obciążającej połączenie, a – wrażliwość dla
C0=0.1pF, b – wrażliwość dla C0=0.2pF, c – wrażliwość dla C0=0.5pF, d – wrażliwość dla C0=1pF
151
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.54. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na wartość indukcyjności
połączenia, dla przykładowych parametrów połączeń (Rt=25Ω, Lt=5nH, Ct=1pF, C0=0.5pF i Rw=25Ω, co
oznacza ε=0.354, α=2, β=0.354, T=71ps) dla zmian czasu narastania Tr, a – wrażliwość dla Tr =10ps, b –
wrażliwość dla Tr =20ps, c – wrażliwość dla Tr =30ps, d – wrażliwość dla Tr =50ps
5.2.4. Wrażliwość na parametry geometryczne połączeń
Zależność wrażliwości odpowiedzi na zbocze narastające na szerokość linii mikropaskowej
można wyrazić wzorem:
S vWr =
W ∂vr
,
vr ∂W
(5.92)
w którym zmienne związane z modelem RLC, są zależne od rozmiarów geometrycznych
połączeń. Zależności na wrażliwość na parametry geometryczne można obliczyć
wykorzystując wcześniej obliczone wrażliwości na parametry RLC. Wrażliwość na szerokość
ścieżki linii mikropaskowej będzie miała postać:
Sd}­ =
3Bª s
EBª ES EBª E^ EBª ED s
=u
+
+
x .
3s Bª
ES Es E^ Es ED Es Bª
(5.93)
Wzory na pochodne występujące we wzorze (5.93) zostały wyznaczone w rozdziale 5.1.4.
Poniżej przedstawiono przykładowe wykresy ilustrujące wrażliwość odpowiedzi na zbocze
narastające na szerokość połączenia.
152
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.55. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające na szerokość ścieżki, dla
przykładowych parametrów połączeń a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2mm, b-
C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=600µm, d=2mm, c- C0=0.5pF i Rw=25Ω, W=4µm, h=1µm, H=300µm,
d=2mm, d- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2.4mm
Wrażliwość na odległość paska od płaszczyzny masy oznaczonej symbolem H można wyrazić
wzorem, w którym pochodne po zmiennych określających parametry geometryczne
połączenia zostały wyznaczone wcześniej przy analizie odpowiedzi skokowej (rozdział 5.1.4):
Sd­ =
3B«
EBª ES EB« E^ EB« ED
=u
+
+
x .
3 B«
ES E E^ E ED E B«
(5.94)
Rys. 5.56. Porównanie wpływu wrażliwości odpowiedzi na zbocze narastające odległość pomiędzy ścieżką a
płaszczyzną masy dla przykładowych parametrów połączeń a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm,
H=300µm, d=2mm, b- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=600µm, d=2mm, c- C0=0.5pF i Rw=25Ω,
W=4µm, h=1µm, H=300µm, d=2mm, d- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=2.4mm
153
Analiza wrażliwości, wpływ indukcyjności połączeń
Wrażliwość napięcia dla sygnału narastającego ma bardzo podobny charakter do wrażliwości
napięcia na analogiczne parametry dla odpowiedzi skokowej. Dlatego w dalszej części
zostaną przedstawione wyniki prac tylko dla wrażliwości sygnału narastającego na parametry
obwodu.
5.3. Wrażliwość czasu przejścia przez próg w odpowiedzi na zbocze
narastające
Wrażliwość czasu przejścia przez próg napięcia na parametry połączenia, odpowiada
względnej zmianie napięcia na zmianę tego parametru. W tym rozdziale zostaną
zaprezentowane wyniki prac poświęconych analizie wrażliwości czasu przejścia przez próg
napięcia na parametry związane zarówno bezpośrednio z połączeniem (wymiary
geometryczne, parametry modelu RLC), ale również na parametry związane z obciążeniem i
rezystancją wejściową połączenia, czyli parametry związane z bramką zasilającą i bramką
obciążającą.
Czas osiągnięcia napięcia progowego, co zostało przedstawione w rozdziale 4.2, można
wyznaczyć w większości przypadków połączeń małostratnych o dużych wartościach
indukcyjności w zakresie czasu Tr<t<3T. W związku z tym wartość progu wyznaczona jest z
zależności (4.26). Wrażliwość połączenia na parametry można z definicji obliczyć z
zależności:
MY¯®¬ =
E[°ª k
.
Ek [°ª
(5.95)
W połączeniach, dla których można zastosować zgrubne wyznaczenie czasu przejścia przez
próg (rozdział 4.2.1) możliwe jest skorzystanie bezpośrednio z zależności (5.95). W
przypadku ogólnym jednak, kiedy konieczne jest wykorzystanie iteracyjnego wzoru na
wyznaczenie czasu przejścia przez próg (4.47), obliczenia wrażliwości bezpośrednio ze wzoru
nie jest możliwe. Konieczne jest zatem stworzenie metody, która umożliwi wyznaczenie
wrażliwości na podstawie zależności na czas przejścia przez próg. Zaproponowana metoda
opiera się na obustronnym zróżniczkowaniu równania:
±(G + 1)²ª = ³' ²a &L´
154
?
+ D? ²ª ² − a &L´ (³?
?
1
− ³' ²ª a L´¬ ) − D? ²ª? − R? ²ª
2
(5.96)
Analiza wrażliwości, wpływ indukcyjności połączeń
i na tej podstawie obliczenia wrażliwości. Szczegółowe wzory i obliczenia zostaną
zaprezentowane w kolejnych podrozdziałach.
5.3.1. Wrażliwość na parametry modelu połączenia
W związku z tym, że w pracy większość parametrów została przeskalowana jako pierwsza
zostanie omówiona wrażliwość na parametry skalowane: parametr perturbacji ε związany ze
stratami oraz parametry związane z obciążeniem α i zasilaniem β oraz Tr. Wyznaczenie
wrażliwości na parametr ε wymaga zróżniczkowania (5.96) po parametrze ε uwzględniając,
̃ = f[°ª − √^Dg/√^D i jest zgodnie z zależnością uproszczoną lub iteracyjną zależny
że [°ª
od ε. W związku z tym (5.96) po zróżniczkowaniu będzie miało postać:
0=
E³'
̃ a &LYZ®¬
[°ª
EH
̃
E[°ª
a &LYZ®¬
EH
?
̃ a &LYZ®¬ (−F)
+ ³' [°ª
̃
E[°ª
EH
?
̃
̃
E[°ª
E[°ª
(³? ? − ³' ²ª a L´¬ )
+ Fa &LYZ®¬
EH
EH
E³?
E³'
1 ED? ? ER?
− a &LYZ®¬ u
²ª a L´¬ x −
² −
² .
?−
EH
EH
2 EH ª
EH ª
+ D? ²ª
K
Oznaczając ²°ªX
=
K
²°ªX
=
+ ³'
?
a &LYZ®¬ ,
yYZ®¬
E³?
EH
³' a &LYZ®¬
yX
oraz rozwiązując równanie liniowe ze względu na
ED?
² [̃
EH ª °ª
yYZ®¬
yX
(5.97)
otrzymamy:
E³'
E³ ̃
ED? ̃
1 ED
ER
² a L´¬ − ' [°ª
+ 2 ? ²ª? + ? ²ª
? 1 − EH ²ª [°ª
EH ª
EH
EH
EH , (5.98)
Z®¬
Z®¬
&LY
&LY
L´
̃ a
(−F) ? + D? ²ª + Fa
(³? ? − ³' ²ª a ¬ )
? + ³' [°ª
?
−
gdzie:
natomiast pochodne
+
E³'
1 P? E³? 1 R? 1 P?
=−
,
=
+
,
EH
F EH EH
F EH F ? EH
,
µ ¶ yI
yX yX
,
yX
(5.99)
zostały zdefiniowane wcześniej.
H
.
̃
[°ª
Wrażliwość na ε będzie więc określona wzorem:
MYX®¬ · [̃′°ªX
(5.100)
155
Analiza wrażliwości, wpływ indukcyjności połączeń
Wrażliwość czasu przejścia przez próg dla odpowiedzi narastającej na parametr ε jest
równoważny wrażliwości na rezystancję połączenia. Można to udowodnić korzystając z
zależności:
̃
̃ EF E[°ª
̃ EG E[°ª
̃ EH
3[°ª
E[°ª
=
+
+
,
3S
EF ES
EG ES
EH ES
(5.101)
podobnie jak w rozdziale 5.1.2 wyznaczając pochodne kolejnych zmiennych po rezystancji
otrzymamy:
3[¹ ±º
1 E[¹±º
1
=
= [¹ ′±ºH,
3S
U0 EH
U0
1 K S
H K
= [°ªX
=
[°ªX = MYX®¬ .
U@
[°ª [°ª
[¹′±ºS =
MYV®¬
(5.102)
(5.103)
Na wykresach (Rys. 5.57 - Rys. 5.59) przedstawiono zależność wrażliwości czasu przejścia
przez próg 50% napięcia, na parametr perturbacji (na rezystancję połączenia) dla
przykładowych zmian wartości parametrów połączenia.
Rys. 5.57. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na parametr perturbacji ε w funkcji zmian
indukcyjności połączenia L. Wrażliwość została wykreślona dla parametrów: Rt=25Ω, Ct=1pF, C0=0.1pF i
Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, b-wartości otrzymane na podstawie zależności
(5.100).
156
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.58. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na parametr perturbacji ε (5.100) w funkcji
zmian indukcyjności połączenia L dla różnych wartości rezystancji połączenia. Wrażliwość została wykreślona
dla parametrów: a - Rt=12.5Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, c -
Rt=50Ω, Ct=1pF, C0=0.1pF i Rw=25Ω.
Rys. 5.59. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na parametr perturbacji ε (5.100) w funkcji
zmian indukcyjności połączenia L dla 3 wartości pojemności obciążenia. Wrażliwość została wykreślona dla
parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.5pF i Rw=25Ω, c - Rt=25Ω,
Ct=1pF, C0=1pF i Rw=25Ω.
Z symulacji wynika, że wrażliwość czasu narastania na rezystancję połączenia w bardzo
niewielkim stopniu zależy od pojemności połączenia oraz czasu narastania sygnału
wejściowego, największy wpływ na wrażliwość ma indukcyjność połączenia oraz pojemność
obciążająca. Duże wartości pojemności połączenia w połączeniu z małą indukcyjnością,
157
Analiza wrażliwości, wpływ indukcyjności połączeń
powodują największą wrażliwość na rezystancję (Rys. 5.59). Większą wrażliwość mają
połączenia bardziej stratne (Rys. 5.58), podobny wpływ można także zauważyć, gdy
połączenie zasilane jest z bramki o większej rezystancji wyjściowej. Analiza wrażliwości dla
zmian indukcyjności połączenia, pozwala sformułować wniosek, że im większa indukcyjność,
tym mniejsza jest wrażliwość na straty w połączeniu określone przez parametr ε.
Wrażliwość czasu przejścia przez próg odpowiedzi na zbocze narastające na parametr β
można wyznaczyć różniczkując równanie (5.96) po β:
±²ª = ³'
̃
E[°ª
a &LYZ®¬
EG
E[̃
ED?
̃ + D? ²ª °ª
²ª [°ª
EG
EG
̃
E[°ª
E³?
(³? ? − ³' ²ª a L´¬ ) − a &LYZ®¬ u
+ Fa &LYZ®¬
− 0x
EG
EG ?
1 ED? ? ER?
−
² −
²
2 EG ª
Eβ ª,
̃ (−F)
? + ³' [°ª
̃
E[°ª
a &LYZ®¬
EG
?+
(5.104)
pochodna czasu przejścia przez próg napięciowy zostanie określona wzorem
K
²°ªQ
=
ED? ̃
E³
1 ED
ER
² [ + a &LYZ®¬ ? ? + 2 ? ²ª? + ? ²ª
EG ª °ª
EG
EG
EG
,
Z®¬
Z®¬
&LY
&LY
̃ Fa
(³? ? − ³' ²ª a L´¬ )
? − ³' [°ª
? + D? ²ª + Fa
±²ª −
³' a &LYZ®¬
R? P?
E³? E , F + F ? 1 1 ER?
=
=
.
EG
EG
F EG
gdzie
Znając (5.105) można wyznaczyć wrażliwość na G postaci:
MY®¬ · [̃′°ªQ
Q
G
.
[°ª
(5.105)
(5.106)
(5.107)
Na podstawie wrażliwości na β można wyznaczyć wrażliwość na rezystancję wejściową Rw.
Korzystając z własności: EF ⁄EST = 0, EH⁄EST = 0, EG⁄EST = 1⁄U@ otrzymujemy:
[¹′±ºS¼ =
MYZ®¬W =
V
3[¹±º E[¹±º 1
1
=
= [¹ ′±ºG ,
3S¼
EG U0 U0
1 K ST
G K
Q
̃
[°ªQ
=
[̃
= MYZ®¬ .
̃
̃ °ªQ
U@
[°ª
[°ª
(5.108)
(5.109)
Otrzymane zależności pozwalają na otrzymanie wartości wrażliwości na rezystancję bramki
wejściowej dla konkretnych parametrów połączenia. Wyniki zostały porównane z wynikami
158
Analiza wrażliwości, wpływ indukcyjności połączeń
symulacji w programie PSpice. Przykładowe wartości parametrów przedstawiono na wykresie
Rys. 5.60.
Rys. 5.60. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na parametr β (rezystancję bramki
zasilającej) w funkcji zmian indukcyjności połączenia L. Wrażliwość została wykreślona dla parametrów:
Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, b-wartości
otrzymane na podstawie zależności (5.107)
Symulacje wykonane w celu sformułowania wniosków dotyczących wpływu parametrów
modelu połączenia, w szczególności indukcyjności połączeń, na wrażliwość czasu przejścia
przez dany próg wartości napięcia, potwierdzają, że im wyższa indukcyjność połączeń i
mniejsza rezystancja tym wrażliwość na rezystancję bramki zasilającej jest mniejsza. Można
też zauważyć, że czas narastania sygnału oraz pojemność połączenia mają niewielki wpływ,
jeśli parametry spełniają warunki połączenia małostratnego. Na wykresach (Rys. 5.61, Rys.
5.62) zamieszczono przykładowe wartości wrażliwości na rezystancję bramki zasilającej dla
wybranych parametrów połączeń ilustrujące zakres zmian i tendencję wrażliwości na zmiany
parametrów R oraz Rw.
159
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.61. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość rezystancji bramki zasilającej
(5.107) w funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji połączenia. Wrażliwość została
wykreślona dla parametrów: a - Rt=12.5Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i
Rw=25Ω, c - Rt=50Ω, Ct=1pF, C0=0.1pF i Rw=25Ω
Rys. 5.62. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość rezystancji bramki zasilającej
(5.107) w funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji bramki zasilającej. Wrażliwość
została wykreślona dla parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=12.5Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i
Rw=25Ω, c - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=50Ω
Wrażliwość czasu przejścia przez próg napięcia, na obciążenie na końcu połączenia,
rozumiane jako pojemność bramki odbiorczej, zostanie wyznaczona z zależności na
parametr α:
160
MYL®¬ · [̃′°ªL
F
[°ª
(5.110)
Analiza wrażliwości, wpływ indukcyjności połączeń
̃
̃
3[°ª
D E[°ª
D
=− ?
= − ? [̃′°ªL
3D@
D@ EF
D@
D K D@
F K
̃
̃
= − ? [°ªL
=
[°ªL
= MYZL®¬
̃
̃
[°ª [°ª
D@
[̃′°ªVIJ =
J
MYZ®¬
I
(5.111)
(5.112)
gdzie MYZL®¬ można wyznaczyć poprzez różniczkowanie (5.96) i wyznaczenie pochodnej czasu
̃
E[°ª
E[̃
̃ ? a &LYZ®¬ ? − ³' [°ª
̃ a &LYZ®¬ °ª
a &LYZ®¬ ? − F³' [°ª
EF
EF
̃
E[
E
°ª
?
̃ a &LYZ®¬
̃ (³? ? − ³' ²ª a L´¬ )
+ ³' [°ª
+ D? ²ª
+ a &LYZ®¬ [°ª
EF
EF
̃
E[°ª
(³? ? − ³' ²ª a L´¬ )
+ a &LYZ®¬ F
EF
E³?
E ? E³'
ER?
− a &LYZ®¬ u
−
²ª a L´¬ − ³' ²ª? a L´¬ x −
² .
? + ³?
EF
EF
EF
EF ª
przejścia przez próg po α. Po zróżniczkowaniu obustronnym otrzymamy zależność:
0=
E³'
̃ a &LYZ®¬
[°ª
EF
? + ³'
?
(5.113)
̃ po α wyrażona jest wzorem:
Wartość pochodnej [°ª
̃K =
[°ªL
E³?
E
E³
E³ ̃
+ ³? ? − ' ²ª a L´¬ − ³' ²ª? a L´¬ − ' [°ª
?1
EF ?
EF
EF
EF
̃ g1 + D? [°ª
̃
a &LYZ®¬ ,F(³? ? − ³' ²ª a L´¬ )+³' ? f1 − F³' [°ª
a &LYZ®¬ ,
+
gdzie:
ª
(5.114)
ER?
²ª
EF
,
̃ g1 + D? [°ª
̃
a &LYZ®¬ ,F(³? ? − ³' ²ª a L´¬ )+³' ? f1 − F³' [°ª
̃
a &LYZ®¬ ³' [°ª
?
?
̃
− ³' [°ª
E ?
̃ (³?
− [°ª
EF
?
− ³' ²ª a L´¬ ) +
ª
E³' P?
= ?,
EF
F
(5.115)
ER?
ER?
F − R? −P? 2F
F − R? 2P?
E³?
EF
EF
=
+
=
− c.
EF
F?
F©
F?
F
(5.117)
E ?
= −²ª a L´¬ ,
EF
(5.116)
Wrażliwość na pojemność obciążenia dla rozważanego przedziału danych parametrów
połączeń jest największa dla dużych wartości pojemności obciążenia i maksymalnie osiągała
wartość 0.5. Znaczący wpływ na zwiększanie się wrażliwości, mają także duże wartości
rezystancji, małe wartości pojemności i indukcyjności połączenia oraz duże wartości
161
Analiza wrażliwości, wpływ indukcyjności połączeń
rezystancji wejściowej. Porównanie wrażliwości otrzymanych prezentowaną metodą
analityczną, z wynikami symulacji w programie PSpice przedstawiono na Rys. 5.63. Na
wykresach z Rys. 5.64 oraz Rys. 5.65 przedstawiono przykładowe wyniki obliczeń dla
wrażliwości na pojemność bramki na wyjściu połączenia dla wybranych parametrów
ilustrujących wpływ wartości tych parametrów na wrażliwość.
Rys. 5.63. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na parametr α (pojemność bramki obciążenia)
w funkcji zmian indukcyjności połączenia L. Wrażliwość została wykreślona dla parametrów: Rt=25Ω, Ct=1pF,
C0=0.1pF i Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, wartości otrzymane na podstawie
zależności (5.112)
Rys. 5.64. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość pojemności bramki obciążenia
(5.112) w funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji połączenia. Wrażliwość została
wykreślona dla parametrów: a - Rt=12.5Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i
Rw=25Ω, c - Rt=50Ω, Ct=1pF, C0=0.1pF i Rw=25Ω
162
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.65. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość pojemności bramki obciążenia
(5.112) w funkcji zmian indukcyjności połączenia L dla 3 wartości pojemności połączenia. Wrażliwość została
wykreślona dla parametrów: a - Rt=25Ω, Ct=0.5pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i
Rw=25Ω, c - Rt=25Ω, Ct=2pF, C0=0.1pF i Rw=25Ω
Wrażliwość czasu przejścia przez próg na ostatni z parametrów określających własności
we/wy, czyli wrażliwość na czas narastania sygnału wejściowego, można wyznaczyć na
podstawie pochodnej czasu przejścia przez próg po zmiennej określającej czas narastania.
Różniczkujące obustronnie równanie (5.96):
±(G + 1) = ³'
̃
E[°ª
a &LYZ®¬
E²ª
̃ (−F)
? + ³' [°ª
̃ + D? ²ª
+ D? [°ª
− a &LYZ®¬ u³?
̃
E[°ª
a &LYZ®¬
E²ª
̃
̃
E[°ª
E[°ª
(³
+ Fa &LYZ®¬
E²ª
E²ª ?
?
?
̃ a &LYZ®¬
+ ³' [°ª
− ³' ²ª a L´¬ )
E ?
E²ª
E ?
1
− ³' a L´¬ − ³' ²ª Fa L´¬ x − D? 2²ª − R? ,
E²ª
2
(5.118)
po wyznaczeniu pochodnej:
̃K ¬
[°ª´
=
̃ g + R? + a &LYZ®¬ a L´¬ fP? f²ª − [°ª
̃ g − R? g
±(G + 1) + D? f²ª − [°ª
D? ²ª + a &LYZ®¬ fR?
?
̃ F
− ³' [°ª
?
− F³' ²ª a L´¬ g
,
(5.119)
163
Analiza wrażliwości, wpływ indukcyjności połączeń
otrzymamy zależność na wrażliwość w postaci:
¬
̃K
MY®¬
· [°ª´¬
´
²ª
.
[°ª
(5.120)
Wrażliwość na czas narastania sygnału zasilającego określona wyrażeniem (5.120) w dość
niewielkim stopniu zależy od parametrów modelu połączenia, szczególnie dla zmian wartości
rezystancji oraz rezystancji wyjściowej bramki zasilającej (Rys. 5.66). Wraz ze wzrostem
indukcyjności, wartość wrażliwości maleje, podobnie dla zmian pojemności oraz pojemności
bramki obciążającej połączenie (Rys. 5.67). Najsilniejsza zależność wrażliwości jest dla
zmian czasu narastania, i dla czasów narastania równych 70% wartości czasu opóźnienia
może osiągać wartość 0.6, gdy dla 10% przy tym samym połączeniu wrażliwość jest równa
0.15.
Rys. 5.66. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość czasu narastania sygnału
wejściowego (5.120) w funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji bramki wejściowej.
Wrażliwość została wykreślona dla parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=12.5Ω, b - Rt=25Ω,
Ct=1pF, C0=0.1pF i Rw=25Ω, c - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=50Ω
164
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.67. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość czasu narastania sygnału
wejściowego (5.120) w funkcji zmian indukcyjności połączenia L dla 3 wartości pojemności połączenia.
Wrażliwość została wykreślona dla parametrów: a - Rt=25Ω, Ct=0.5pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω,
Ct=1pF, C0=0.1pF i Rw=25Ω, c - Rt=25Ω, Ct=2pF, C0=0.1pF i Rw=25Ω
Wrażliwość na próg napięcia można wyznaczyć ze wzoru:
̃K
MY®¬ · [°ª°
°
±
,
[°ª
(5.121)
̃ K jest pochodną czasu przejścia przez próg dla wymuszenia narastającego obliczoną
gdzie [°ª°
po zmiennej określającej wartość progu, dla którego ten czas został wyznaczony, pochodna
wyznaczona zostanie z równania powstałego po zróżniczkowaniu (5.96) względem ρ:
(G + 1)²ª = ³'
̃
E[°ª
a &LYZ®¬
E±
̃ a &LYZ®¬
? −F³' [°ª
̃
E[°ª
+F
a &LYZ®¬ (³?
E±
?
− ³' ²ª a
̃
E[°ª
E±
L´¬ ).
? + D? ²ª
̃
E[°ª
E±
(5.122)
Wrażliwość będzie więc wyznaczona wzorem:
MY®¬ ·
°
(G + 1)²ª
±
.
[°ª D ² + a &LYZ®¬ ,R
L´¬ + [̃
−
F³
f²
a
g1
? ª
? ?
' ª
°ª ?
(5.123)
Wrażliwość na czas narastania sygnału zasilającego określona wyrażeniem (5.123), w dość
znacznym stopniu zależy od parametrów modelu połączenia. Zależność od indukcyjności nie
165
Analiza wrażliwości, wpływ indukcyjności połączeń
ma charakteru malejącego, ale dla małych wartości indukcyjności maleje, dla dużych
nieznacznie rośnie. Wrażliwość na czas narastania cechuje się bardzo dużą zależnością od
parametru C0, określającego pojemność bramki na wyjściu połączenia, i dla większych
wartości obciążenia przy małych wartościach indukcyjności (np. C0=1pF, L=2nH), osiąga
wartość 1.4. Podobnie jak przy wrażliwości czasu narastania na wcześniej omówione
parametry wzrost rezystancji powoduje wzrost wrażliwości, podobną zależnością cechują się
zmiany rezystancji wejściowej (Rys. 5.68). Zmiany pojemności połączenia natomiast, dla
małych wartości indukcyjności powodują, wzrost wrażliwości, dla dużych spadek
wrażliwości (Rys. 5.69).
Rys. 5.68. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość czasu narastania sygnału
wejściowego (5.120) w funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji bramki wejściowej.
Wrażliwość została wykreślona dla parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=12.5Ω, b - Rt=25Ω,
Ct=1pF, C0=0.1pF i Rw=25Ω, c - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=50Ω
166
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.69. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na wartość czasu narastania sygnału
wejściowego (5.120) w funkcji zmian indukcyjności połączenia L dla 3 wartości pojemności połączenia.
Wrażliwość została wykreślona dla parametrów: a - Rt=25Ω, Ct=0.5pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω,
Ct=1pF, C0=0.1pF i Rw=25Ω, c - Rt=25Ω, Ct=2pF, C0=0.1pF i Rw=25Ω
Wrażliwość czasu przejścia przez próg napięcia na pojemność połączenia można wyznaczyć
korzystając z przedstawionych wcześniej zależności na wrażliwość na parametry α, β, ε:
½YZ®¬
½I
gdzie:
natomiast
,
yQ
,
yX
yYZ®¬ yL
yL
+
yI
yYZ®¬ yQ
yQ
+
yI
yYZ®¬ yX
yX yI
,
EF
1 EH
S EG
ST
= ,
=
,
=
,
ED D@ ED 2√^D ED 2√^D
yYZ®¬ yYZ®¬ yYZ®¬
yL
=
(5.124)
(5.125)
są wyrażone kolejno zależnościami (5.114), (5.105) oraz (5.98).
Na wykresie poniżej (Rys. 5.70) przedstawiono porównanie wyniku otrzymanego metodą
analityczną zaprezentowaną powyżej z wynikami symulacji wykonanymi w programie PSpice
dla kilku przykładowych parametrów połączeń.
Wrażliwość czasu przejścia przez próg napięcia na końcu połączenia przyjmuje stosunkowo
duże wartości w rozważanym zakresie parametrów (ok 0.4) i w bardzo małym stopniu zależy
od zmian wartości parametrów, jeśli mieszczą się one w zakresie stosowalności metody.
Najsilniejszy wpływ mają wartości pojemności obciążającej (Rys. 5.72) oraz pojemności
167
Analiza wrażliwości, wpływ indukcyjności połączeń
połączenia (Rys. 5.71). W niewielkim stopniu wrażliwość zależy też od wartości progu (dla
większych progów wartości wrażliwości są mniejsze).
Rys. 5.70. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na pojemność modelu połączenia C w funkcji
zmian indukcyjności połączenia L. Wrażliwość została wykreślona dla parametrów: Rt=25Ω, Ct=1pF, C0=0.1pF
i Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, b-wartości otrzymane na podstawie
zależności (5.112).
Rys. 5.71. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na pojemność modelu połączenia C w funkcji
zmian indukcyjności połączenia L dla 3 wartości pojemności połączenia. Wrażliwość została wykreślona dla
parametrów: a - Rt=25Ω, Ct=0.5pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, c - Rt=25Ω,
Ct=2pF, C0=0.1pF i Rw=25Ω.
168
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.72. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na pojemność modelu połączenia C w funkcji
zmian indukcyjności połączenia L dla 3 wartości pojemności obciążenia. Wrażliwość została wykreślona dla
parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.5pF i Rw=25Ω, c - Rt=25Ω,
Ct=1pF, C0=1pF i Rw=25Ω.
Podobnie jak wrażliwość na pojemność połączenia, można wyznaczyć wrażliwość czasu
przejścia przez próg napięcia na końcu połączenia, na indukcyjność połączenia L:
gdzie:
natomiast
̃
̃ EF E[°ª
̃ EG E[°ª
̃ EH
3[°ª
E[°ª
=
+
+
,
3^
EF E^
EG E^
EH E^
(5.126)
EF
EH
1 S D EG
1 ST D
m ,
m ,
= 0,
=−
=−
E^
E^
2 ^ ^ E^
2 ^ ^
(5.127)
|¾Z¿­ |¾Z¿­ |¾Z¿­
|À
,
|Á
,
|
są wyrażone zależnościami (5.114), (5.105) oraz (5.98).
169
Analiza wrażliwości, wpływ indukcyjności połączeń
Na wykresie z
Rys. 5.73 przedstawiono porównanie wyników analitycznych określającą wrażliwość czasu
przejścia sygnału przez próg napięcia na indukcyjność połączenia z wynikami symulacji w
programie PSpice. Wyniki analizy wrażliwości dla różnych wartości parametrów pozwalają
stwierdzić, że największy wpływ na wartość wrażliwości maja wartość pojemności
obciążenia. Ponieważ analiza indukcyjności połączeń jest głównym tematem tej pracy, na
kolejnym wykresie (Rys. 5.74) przedstawiono porównanie wrażliwości w funkcji zmian tego
parametru z wynikami otrzymanymi w PSpice.
Rys. 5.73. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na indukcyjność modelu połączenia L w
funkcji zmian indukcyjności połączenia L. Wrażliwość została wykreślona dla parametrów: Rt=25Ω, Ct=1pF,
C0=0.1pF i Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, b - wartości otrzymane na
podstawie zależności (5.112)
170
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.74. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na indukcyjność modelu połączenia L w
funkcji zmian pojemności obciążenia C0. Wrażliwość została wykreślona dla parametrów: Rt=25Ω, Ct=1pF,
C0=0.1pF i Rw=25Ω, a-wartości wrażliwość wyznaczone z programu PSpice, b - wartości otrzymane na
podstawie zależności (5.112)
Na kolejnych wykresach przedstawiono wartości wrażliwości dla różnych zestawów
parametrów połączeń ilustrujące wpływ tych wartości na wrażliwość.
Rys. 5.75. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na indukcyjność modelu połączenia L w
funkcji zmian indukcyjności połączenia L dla 3 wartości pojemności obciążenia połączenia. Wrażliwość została
wykreślona dla parametrów: a - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.5pF i Rw=25Ω,
c - Rt=25Ω, Ct=1pF, C0=1pF i Rw=25Ω
171
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.76. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na indukcyjność modelu połączenia L w
funkcji zmian indukcyjności połączenia L dla 3 wartości pojemności połączenia. Wrażliwość została wykreślona
dla parametrów: a - Rt=25Ω, Ct=0.5pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, c -
Rt=25Ω, Ct=2pF, C0=0.1pF i Rw=25Ω
Rys. 5.77. Wrażliwość czasu przejścia przez próg 50% napięcia E0 na indukcyjność modelu połączenia L w
funkcji zmian indukcyjności połączenia L dla 3 wartości rezystancji połączenia. Wrażliwość została wyznaczona
dla parametrów: a - Rt=12.5Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, b - Rt=25Ω, Ct=1pF, C0=0.1pF i Rw=25Ω, c -
Rt=50Ω, Ct=1pF, C0=0.1pF i Rw=25Ω
Analiza wartości wrażliwości na różne parametry pozwala na sformułowanie pewnych
wniosków ogólnych. Wrażliwość na większość parametrów maleje wraz ze wzrostem
indukcyjności i zmniejszaniem się rezystancji. Z punktu widzenia analizy wrażliwości,
niekorzystne są także duże wartości pojemności obciążającej. Wyprowadzone zależności na
funkcje wrażliwości pozwalają na szybkie obliczenia wrażliwości dla konkretnych
parametrów połączeń, bez wykonywania żmudnych symulacji odpowiedzi, a następnie na ich
172
Analiza wrażliwości, wpływ indukcyjności połączeń
podstawie, korzystając z metod przyrostowych wyznaczania wrażliwości. Przedstawiona
metoda analityczna, której dokładność została potwierdzona symulacyjnie, ma zastosowanie
w analizie połączeń wyższych warstw układów VLSI, przy założeniu, że straty połączenia są
nieduże i można potraktować je jako parametr perturbacyjny.
5.3.2. Wrażliwość na parametry geometryczne połączeń
Wrażliwość czasu przejścia przez próg napięciowy na parametry geometryczne zostanie
wyznaczona podobnie jak wrażliwość odpowiedzi skokowej i odpowiedzi na zbocze
narastające (rozdziały 5.1.4 i 5.2.4).
Dla wrażliwości czasu przejścia przez próg na szerokość ścieżki W oraz na odległość ścieżki
od płaszczyzny masy H, wzory określające tę zależność przyjmą odpowiednio postać:
SY}®¬ =
3[°ª s
E[°ª ES E[°ª E^ E[°ª ED s
=
+
+
,
3s [°ª
ES Es
E^ Es
ED Es [°ª
SY®¬ =
3[°ª
E[°ª ES E[°ª E^ E[°ª ED
=
+
+
,
3 [°ª
ES E
E^ E
ED E [°ª
(5.128)
(5.129)
gdzie odpowiednie pochodne czasu przejścia przez próg po parametrach połączenia zostały
określone zależnościami (5.102), (5.124), (5.126), natomiast pochodne parametrów modelu
połączenia RLC po parametrach geometrycznych zależnościami: (5.48) - (5.52) oraz (5.55) (5.61). Na kolejnych wykresach przedstawiono wrażliwość czasu przejścia przez próg na
szerokość ścieżki połączenia, oraz grubość podłoża dla różnych parametrów geometrycznych
połączenia. Można zauważyć, że wrażliwość na szerokość ścieżki, szczególnie dla ścieżek o
małym przekroju jest duża, natomiast wrażliwość na grubość podłoża jest zdecydowanie
mniejsza, szczególnie dla ścieżek szerokich i zasilanych ze źródeł o niewielkich rezystancjach
wyjściowych bramek.
173
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.78. Porównanie wrażliwości czasu przejścia przez dany próg napięciowy na szerokość ścieżki dla różnych
wartości długości ścieżki oraz odległości pomiędzy ścieżką a płaszczyzną masy dla przykładowych parametrów
połączeń (ρ=0.5 ilość iteracji N=10) a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, d=2mm, b- C0=0.5pF i Rw=25Ω,
W=2µm, h=1µm, d=3mm, c- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, H=300µm, d=4mm
Rys. 5.79. Porównanie wrażliwości czasu przejścia przez dany próg napięciowy na szerokość ścieżki dla różnych
wartości rezystancji obciążenia oraz szerokości ścieżki dla przykładowych parametrów połączeń (ρ=0.5 ilość
iteracji N=10) a - C0=0.5pF i Rw=12.5Ω, H=300µm, W=2µm, h=1µm, d=2mm, b- C0=0.5pF i Rw=25Ω, W=2µm,
h=1µm, d=2mm, c- C0=0.5pF i Rw=50Ω, W=2µm, h=1µm, d=3mm, d- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm,
H=300µm, d=2mm
174
Analiza wrażliwości, wpływ indukcyjności połączeń
Rys. 5.80. Porównanie wrażliwości czasu przejścia przez dany próg napięciowy na grubość podłoża dla różnych
wartości długości ścieżki oraz odległości pomiędzy ścieżką a płaszczyzną masy dla przykładowych parametrów
połączeń (ρ=0.5 ilość iteracji N=10) a - C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, d=2mm, b- C0=0.5pF i Rw=25Ω,
W=2µm, h=1µm, d=2mm, c- C0=0.5pF i Rw=25Ω, W=2µm, h=1µm, d=3mm, d- C0=0.5pF i Rw=25Ω, W=2µm,
h=1µm, H=300µm, d=4mm
Rys. 5.81. Porównanie wrażliwości czasu przejścia przez dany próg napięciowy na grubość podłoża dla różnych
wartości rezystancji obciążenia oraz szerokości ścieżki dla przykładowych parametrów połączeń (ρ=0.5 ilość
iteracji N=10) a - C0=0.5pF i Rw=12.5Ω, H=300µm, W=2µm, h=1µm, d=2mm, b- C0=0.5pF i Rw=25Ω, W=2µm,
h=1µm, d=2mm, c- C0=0.5pF i Rw=50Ω, W=2µm, h=1µm, d=3mm
Przedstawione powyżej zależności, umożliwiają analityczne obliczanie wrażliwości w
połączeniach małostratnych na parametry geometryczne, takie jak szerokość ścieżki i
wysokość podłoża. Zaprezentowana metoda obliczania wrażliwości może łatwo zostać
rozszerzona do obliczania wrażliwości czasu przejścia przez próg na pozostałe parametry
175
Analiza wrażliwości, wpływ indukcyjności połączeń
geometryczne, a także na parametry materiałowe. Dokładność metody jest przede wszystkim
uzależniona od tego czy połączenie mieści się w granicach określonych w pracy jako
połączenia małostratne (S < 1/2U@ ) i od dokładności wzorów określających parametry RLC
na podstawie parametrów geometrycznych i materiałowych.
176
Podsumowanie.
6. Podsumowanie.
Praca poświęcona jest zagadnieniom modelowania i symulacji układów VLSI. Głównym
celem pracy było stworzenie efektywnych technik obliczania parametrów, związanych z
propagacją sygnału w połączeniach, znajdujących się w wyższych warstwach układów
scalonych. Takie połączenia cechują się stosunkowo małymi wartościami rezystancji oraz
dużymi wartościami indukcyjności. Dlatego stworzona metoda musiała uwzględniać wpływ
indukcyjności na propagację sygnału w połączeniu. Pierwsza część tezy mówi, że
indukcyjność połączeń odgrywa dużą rolę w propagacji sygnału w układach VLSI. Przy
modelowaniu połączeń, konieczne jest korzystanie z modeli uwzględniających indukcyjności
pasożytnicze linii transmisyjnej. Potwierdzenie tej części tezy uzyskano na podstawie analizy
literaturowej oraz szeregu symulacji, których wyniki zostały przedstawione w rozdziale 2.3.
Dodatkowo przeprowadzono obszerną analizę wrażliwości odpowiedzi napięciowej połączeń
oraz czasu przejścia przez próg 50% wartości napięcia, ze szczególnym uwzględnieniem
wrażliwości na indukcyjność połączeń (rozdział 5). Druga część tezy, powiązana jest z celem
pracy i mówi, że istnieje możliwość stworzenia efektywnego modelu, opartego na linii
transmisyjnej RLC i wyznaczenie wzorów o zwartej formie, określających napięcie na końcu
połączenia oraz czas przejścia przez napięcie progowe. W celu potwierdzenia tezy, autorka
opracowała metodę opartą na analitycznym wyprowadzeniu odpowiedzi z równań linii
177
Podsumowanie.
transmisyjnej RLC dla wymuszenia skokiem jednostkowym (rozdział 0). Obliczenie
odpowiedzi na końcu połączenia, uzyskane zostało przy użyciu metody wielu skal, która
należy do perturbacyjnych metod rozwiązywania równań różniczkowych. Następnie autorka
rozszerzyła rozwiązanie na odpowiedź na zbocze narastające (rozdział 3.1.2). Na podstawie
analitycznych wzorów na odpowiedź skokową i odpowiedź na zbocze narastające,
wyprowadziła analityczne wzory, umożliwiające obliczanie czasu przejścia przez dowolne
progi napięciowe tylko i wyłącznie na podstawie parametrów obwodu (rozdział 4). W ten
sposób autorka udowodniła, że możliwe jest uzyskanie analitycznych wzorów określających
napięcie i czas przejścia przez próg dla połączenia opartego na modelu linii transmisyjnej
RLC w przypadku połączeń o dużych wartościach indukcyjności pasożytniczych.
Efektywność metody została potwierdzona przez szereg symulacji w zakresie parametrów
odpowiednich dla wyższych warstw połączeń [25], [41], a wyniki zostały porównane z
wynikami symulacji w programie PSpice oraz z wynikami wcześniejszych prac dotyczących
symulacji i modelowania połączeń [41]. Wyprowadzone zależności analityczne pozwalają w
prosty sposób wyznaczyć wrażliwość na parametry związane z połączeniem (R, L, C),
parametry
związane
z
bramkami:
zasilającą
i
obciążającą
oraz
z
parametrami
geometrycznymi połączenia (rozdział 5). Dodatkowo, w prosty sposób można rozszerzyć
rozwiązanie na kilka jednakowych połączeń sprzężonych, takich, w których można
uwzględnić jedynie wpływ sprzężeń pomiędzy dwoma najbliżej sąsiadującymi ze sobą
połączeniami.
Cząstkowe wyniki badań nad uzyskaniem efektywnej metody symulacji połączeń
małostratnych, o dużych wartościach indukcyjności zaprezentowano na kilku konferencjach
zagranicznych, poświęconych modelowaniu i analizie układów scalonych [54], [57], [58],
[59], [60], [61], w tym na konferencji Workshop on Signal Propagation on Interconnect
poświęconej w całości zagadnieniom połączeń w układach scalonych [51], [53], [55], [56],
[62]. Został także przygotowany artykuł [52] do czasopisma IEEE Transaction on Advanced
Packaging, który po uzyskaniu pozytywnych recenzji został przyjęty do publikacji.
Najważniejszym oryginalnym osiągnięciem przedstawionym w rozprawie jest analityczne
wyprowadzenie wzoru na obliczanie czasu przekroczenia progu napięciowego (ang. threshold
crossing time) dla połączeń małostratnych, o dużych wartościach indukcyjności w układzie
bramka-połączenie-bramka, przy wymuszeniu sygnałem skoku jednostkowego lub sygnałem
narastającym.
178
Podsumowanie.
Metoda polega na zastosowaniu metody wielu skal do wyznaczeniu odpowiedzi skokowej
oraz odpowiedzi na zbocze narastające . Na podstawie obliczonych zależności wyznaczony
został czas przejścia przez próg. W rozprawie zaprezentowano uproszczenie, dzięki któremu
czas przejścia przez próg może zostać zapisany w postaci zwartego wzoru oraz wzór
umożliwiający obliczenie czasu przejścia przez próg z nieuproszczonej zależności na
napięcie. Podobne rozważania zostały przeprowadzone zarówno dla odpowiedzi skokowej jak
i dla odpowiedzi na zbocze narastające. Wyznaczony wzór na czas przejścia przez próg
napięciowy stał się podstawą do dalszej analizy.
Dodatkowymi osiągnięciami prezentowanymi w pracy są:
•
wyznaczenie wartości napięcia na końcu układu bramka-połączenie-bramka, przy
wymuszeniu sygnałem skoku jednostkowego lub sygnałem narastającym,
•
rozszerzenie obliczeń napięcia na układ połączeń sprzężonych,
•
analiza wrażliwości napięcia na końcu połączenia na parametry R, L, C i
geometryczne połączenia oraz na parametry bramek zasilającej i obciążającej,
•
obliczenie i analiza wrażliwości czasu przejścia przez wybrany próg napięciowy na
parametry R, L, C i geometryczne połączenia oraz na parametry bramek zasilającej i
obciążającej.
Prezentowane rozwiązania zostały porównane z symulacjami w programie PSpice i wykazują
się stosunkowo niewielkimi błędami w analizowanym przedziale parametrów (poniżej 10%
dla czasów przejścia przez próg, obliczanych metodą iteracyjną dla R<Z0 i poniżej 1% dla
R<0.5Z0). Wykonana analiza wyników wykazała, że stosowanie modelu połączenia
uwzględniającego wartości indukcyjności, do obliczania odpowiedzi połączenia oraz czasu
przejścia przez próg napięciowy jest możliwe i daje dobre rezultaty w analizie połączeń.
Wyprowadzone zależności pozwalają na obliczanie na ich podstawie wrażliwości połączeń i
dzięki temu umożliwiają analizę wpływu zmian parametrów na sygnał oraz stanowią bazę do
obliczeń optymalizacyjnych, np. dla czasów opóźnień związanych z narastaniem sygnału na
wyjściu połączenia.
179
Podsumowanie.
180
Literatura
7. Literatura
[1]
Agarwal K., Sylvester D., Blaauw D., “Simple metrics for slew rate of RC
circuits based on two circuit moments”, Proc. IEEE/ACM Design Automation
Conf., 2003, pp. 950–953.
[2]
Alpert C. J., Devgan A., Kashyap C., “A two moment RC delay metric for
performance optimization”, Proc. Int. Symp. Phys. Design,2000, pp. 69–74.
[3]
Alpert C.J., Liu F., Kashyap C.V., Devgan A., “Closed-form delay and slew
metrics made easy”, IEEE Tran. On CAD of Integr. Circuits and Syst.,, vol. 23,
Issue 12, Dec. 2004 pp. 1661–1669.
[4]
Azadpour M.A., Kalkur T.S., "VLSI Interconnect Modeling at Multi-GHz
Frequencies Incorporating Inductance" Proc. Southwest Symposium on
Mixed-Signal Design, 2003, pp. 54 - 59.
[5]
Bandurski W., "Metody analizy i symulacji połączeń w szybkich układach
cyfrowych", Wydawnictwo Politechniki Poznańskiej, Poznań, 2006.
181
Literatura
[6]
Bandurski W., “Simulation of single and coupled transmission lines using timedomain scattering parameters”, IEEE Tran. CAS-I, vol.47, No. 8, August 2000,
pp.1224-1234.
[7]
Banerjee K., Mehrotra A., “Analysis on-chip inductance effects for distributed
RLC interconnects”, IEEE Tran. On CAD of Integr. Circuits and Syst., vol.16,
No. 8, august 2002, pp. 904-915.
[8]
Barry D. A., Parlange J., Li L., Prommer H., Cunningham C. J., Stagnitti F.
“Analytical approximations for real values of the Lambert W-function”. Math.
Comput. Simul. 53, 1-2, Aug. 2000, pp. 95-103.
[9]
Bender C.M., Orszag S. A., "Advanced Mathematical Methods for Scientists
and Engineers: Asymptotic Methods and Perturbation Theory", Springer,
1999.
[10]
Berkeley
predictive
technology
model.
http://www.eas.asu.edu/~ptm/interconnect.html, 10/2008.
[11]
Bjoerck A., Dalquist G., “Numerical Methods”, Prentice-Hall, Englewood Cliffs,
NJ, 1974.
[12]
Bueno M.A., Assis A.K.T., "A new method for inductance calculation", J. Phys.
D: Appl. Phys. 28, 1995.
[13]
Caputa P., "Efficient High-Speed On-Chip Global Interconnects", dissertation,
Electronic Devices, Linkoping University, Sweden, 2006.
[14]
Celik M., Pileggi L., Odabasioglu A., “IC Interconnect Analysis”, Boston,
Kluwer Academic Publishers, 2002.
[15]
Chapeau-Blondeau F., Monir A., “Numerical evaluation of the Lambert W
function and application to generation of generalized Gaussian noise with
exponent 1/2” IEEE Trans. Signal Processing, vol. 50, Sept. 2002.
[16]
Chen B., Young H., Luo R., Wang H., “A novel method for worst-case
interconnect estimation”, IEEE CAS-I, vol. 50, No.6, June 2003, pp. 778-781.
182
Literatura
[17]
Chen J., He L., “Piecewise linear model for transmission line with capacitive
loading and ramp input”, IEEE Tran. On CAD of Integr. Circuits and Syst.,
vol.24 No.6, June 2005, pp. 928-937.
[18]
Cheng J., Cangellaris A.C., Yaghmour A.M., Prince J.L., ”Sensitivity analysis
of multiconductor transmission lines and optimization for high-speed
interconnect circuit design" IEEE Trans. on Advanced Packaging, vol. 23,
Issue 2, May 2000, pp.132 - 141.
[19]
Cheng Ch., Lillis J., Lin S., Chang N., “Interconnect Analysis and Synthesis”,
Wiley & Sons, 2000.
[20]
Chirpout E., "Asymptotic waveform evaluation and moment matching for
interconnect analysis", Kluwer Academic Publishers, 1994.
[21]
Corless R. M., Gonnet G. H., Hare D. E. G., Jeffrey D. J., Knuth D. E., "On the
Lambert W Function", Advances in Computational Mathematics, 5, 1996.
[22]
Corti A., Maffucci G., Miano T., Verolino L., "Time-domain two-port
representations
of
a
lossy
line",
Electrical
Engineering
(Archiv
fur
Elektrotechnik), vol. 80, Number 4, 1997.
[23]
Davis J.A., Meindl J.D., "Compact distributed RLC interconnect models - Part
I: Single line transient, time delay and overshoot expressions", IEEE Trans.
Elect. Dev., Nov 2000, pp. 2068--2077.
[24]
Davis J.A., J.D.Meindl “Compact distributed RLC interconnect models—Part II:
Coupled line transient expressions and peak crosstalk in multilevel
interconnect networks", IEEE Trans. Electron Devices, vol. 47, pp. 2078–
2087, Nov. 2000.
[25]
Deutsch A. et al., “Effects of noise on timing or data-pattern dependent delay
variation when transmission-line effects are taken into account for on-chip
wiring”,
Proc.
11th
of
IEEE Workshop
on
Signal
Propagation
On
Interconnects, May 2007, Genova, pp. 7-11.
183
Literatura
[26]
Deutsch A. et al., “When are transmission-line effects important for on-chip
inerconnections”, IEEE Trans. on MTT., vol. 45, No. 10, Octob.1997, pp. 18361846.
[27]
Elmore W.C., "The Transient Analysis of Damped Linear Networks with
Particular Regard to Wideband Amplifiers", J. Applied Physics, vol. 19(1),
1948.
[28]
Eo Y., Shim J., Eisenstadt W.R., "A Traveling-Wave-Based Waveform
Approximation Technique for the Timing Verification of Single Transmission
Lines", IEEE Tran. On CAD of Integr. Circuits and Syst., vol. 21, No. 6, June
2002.
[29]
Escovar R., Ortiz S., Suaya R., "An Improved Long Distance Treatment for
Mutual Inductance" IEEE Tran. On CAD of Integr. Circuits and Syst., vol. 24,
No. 5, May 2005.
[30]
Escovar R., Suaya R., “Optimal design of clock trees for multigigahertz
applications", IEEE, Trans-CAD, vol. 23, No. 3, 2004, pp. 329-345.
[31]
Gustavsen B., Semyen A., “Rational approximation of frequency domain
responses by vector fitting", IEEE Trans-PWD, vol. 14, No. 3, 1999, pp. 10521061.
[32]
Hall S.H., Hall G.W., McCall J.A., "High Speed Digital System Design",
Hoboken, NJ, John Wiley and Sons, 2000.
[33]
Hastings A. "The Art of Analog Layout", Upper Saddle River, NJ, Prentice. Hall,
2001.
[34]
He L., Chang N., Lin S., Nakagawa O. S., “An efficient inductance modeling
for on-chip interconnects", in Proc. Custom Integrat. Circuits Conf., 1999, pp.
457–460.
[35]
International
Technology
Roadmap
for
Semiconductors
Semiconductor Industry Assoc., San Jose, CA, 2003.
184
(ITRS),
Literatura
[36]
International
Technology
Roadmap
for
Semiconductors
(ITRS),
Semiconductor Industry Assoc., San Jose, CA, 2005.
[37]
International
Technology
Roadmap
for
Semiconductors
(ITRS),
Semiconductor Industry Assoc., San Jose, CA, 2007.
[38]
Ismail Y. I., Friedman E. G., Neves J. L., “Equivalent elmore delay for RLC
trees”, IEEE Trans. CAD, vol. 19, no. 1, 2000, pp.83–97.
[39]
Ismail Y. I., Friedman E. G., Neves J. L., “Figures of merit to characterize the
importance of on-chip inductance”, IEEE Transactions on VLSI Systems, vol.
7, No. 4, December 1999, pp. 442 - 449.
[40]
Ismail Y.I., Amin Ch.S., “Computation of signal-threshold crossing times
directly from higher order moments”, IEEE, Trans-CAD, vol. 23, No. 7, 2004,
pp. 1264-1276.
[41]
Ismail Y.I, Friedman E.G., “Effects of inductance on the propagation delay and
repeater insertion in VLSI circuits”, IEEE Tran. VLSI Sys., vol. 8, No. 2, April
2000, pp. 195-206
[42]
Johnson H.W., Graham M., "High-Speed Digital Design, A Handbook of Black
Magic", Pretience Hall, New Jersey, 1993.
[43]
Johnson, R. S., "Singular Perturbation Theory Mathematical and Analytical
Techniques with Applications to Engineering", New York, Springer, 2004.
[44]
Kahng A.B., Muddu S., “An analytical delay model for RLC interconnects”,
IEEE Trans. on CAD of Integr. Circuits and Syst., vol.16, Dec. 1997, pp.15071514.
[45]
Kahng A.B., Masuko K., Muddu S., "Analytical delay models for VLSI
interconnects under ramp input", IEEE/ACM International Conference on
Computer-Aided Design, 1996. ICCAD-96. Digest of Technical Papers., 10-14
Nov. 1996, pp. 30 - 36.
185
Literatura
[46]
Kahng A.B., Masuko K., Muddu S., "Delay models for MCM interconnects when
response is nonmonotone", Multi-Chip Module Conference, MCMC '97., 4-5
Feb. 1997, pp. 102 – 107.
[47]
Kahng A.B., Muddu S., "Delay analysis of coupled transmission lines", Circuits
and Systems, 1996., IEEE Asia Pacific Conference on 18-21 Nov. 1996. pp.
81–84.
[48]
Kang S.M., Leblebici Y., "CMOS Digital Integrated Circuits: Analysis and
Design", McGraw-Hill Publishing Co., New York, 2003.
[49]
Kay R., Pileggi L., “PRIMO: Probability interpretation of moments for delay
calculation”, Proc. IEEE/ACM Design Automation Conf., 1998, pp. 463–469.
[50]
Klingenstein W., "Semiconductors Technology Roadmap Information" Society
Technologies for Broadband Europe, Romania, Bucharest, October 9-11,
2002.
[51]
Ligocka A., Bandurski, W., "The Low-Loss Interconnects Simulation by
Perturbation Methods", Proc. of the 11th IEEE Workshop on Signal
Propagation on Interconnects, May 2007.
[52]
Ligocka A., Bandurski, W., "Multiple Scales Method in Calculation of VLSI
Interconnects Threshold Crossing Time", IEEE Trans. on Advanced
Packaging, artykuł zrecenzowany, w edycji.
[53]
Ligocka A., Bandurski W., "Using Multiple Scales Method to calculate
threshold crossing time for the ramp response for high inductance VLSI
interconnects", Proc. of the 12th IEEE Workshop on Signal Propagation on
Interconnects, May 2008.
[54]
Ligocka A., Bandurski W., Rydlichowski P., "A New Approach to Analysis and
Simulation of Single and Coupled Low-Loss Interconnects", Proc. of ECCTD
2007, Sevilla, August 26 - 30, 2007.
186
Literatura
[55]
Ligocka A., Bandurski W., "Computation of Signal -Threshold Crossing
Times", 9th IEEE Workshop on Signal Propagation on Interconnects, SPI'05,
Garmisch PartenKirchen (Germany), 2005.
[56]
Ligocka A., Bandurski W., "Effect of Inductance on Interconnect Propagation
Delay in VLSI Circuits", 8th IEEE Workshop on Signal Propagation on
Interconnects -SPI'04, Hanover (Germany), 2004.
[57]
Ligocka A., Bandurski W., "Estimation of Interconnect Propagation Delay in
VLSI Circuits", International Conference on Signals and Electronic Systems
ICSES'04, Poznan, 2004, pp. 477-480.
[58]
Ligocka A., Bandurski W., "Application of multiple scales in estimation the
crossing time in highly inductive interconnects", Proc. of the International
Conference on Signals and Electronic Systems, ICSES '06, September 2006,
pp. 457-460
[59]
Ligocka A., Bandurski W., "Sensitivity analysis of VLSI interconnect output
signal, Mixed Design of Integrated Circuits and Systems", 15th International
Conference on MIXDES 2008, 19-21 June 2008, pp. 437 - 441.
[60]
Ligocka A., Bandurski W., "Sensitivity analysis of ramp response of VLSI
interconnects", International Conference on Signals and Electronic Systems,
2008, ICSES '08, 14-17 Sept. 2008, pp. 537 - 540.
[61]
Ligocka A., Bandurski W., "Estimation Of Threshold Crossing Time In Lowloss Interconnects", Mixed Design of Integrated Circuits and System, MIXDES
2006, Proc. of the International Conference, June 2006, pp. 469 - 474.
[62]
Ligocka A., Bandurski W., "Modeling and Simulation of Highly Inductive OnChip Interconnects", Proc. of the 10th IEEE Workshop on Signal Propagation
on Interconnects, May 2006.
[63]
Lin Ch.A., Wu Ch-H., „Second Order Approximations for RLC Trees“ IEEE
trans on Comp. Aid. Design on Circuits and Systems, vol.23, No.7, July 2004,
pp. 1124-1128.
187
Literatura
[64]
Lin S., "On-Chip Inductance and Coupling Effects", ASIC/SOC 2000
Interconnect Modeling and Design for Giga-Hertz Circuits and Systems, by
Hewlett Packard Labs, http://eda.ee.ucla.edu/pub/asic.pdf.
[65]
Maichen W., "When Digital Becomes Analog-Interfaces in High Speed Test",
12th Workshop on Signal Propagation on Interconnect, Avignon, France,
2008.
[66]
Mao Jun-Fa, Kuh E.S., "Fast simulation and sensitivity analysis of lossy
transmission lines by the method of characteristics", IEEE Trans. on Circuits
and Systems I: Fundamental Theory and Applications, vol. 44, Issue 5, May
1997, pp. 391 - 401.
[67]
Miano G., Maffucci A., "Transmission Lines and lumped circuits", Academic
Press, New York, 2001.
[68]
Moore G., “Cramming more Components into Integrated Circuits”, Electronics,
vol. 38, Nr 8, April 1965.
[69]
Niknejad A.M., "Electromagnetics for High-Speed Analog and Digital
Communication Circuits", Cambridge University Press, 2007.
[70]
Ogrodzki J., "Komputerowa analiza układów elektronicznych", Warszawa,
Wydaw. Nauk. PWN, 1994.
[71]
Osiowski J., "Zarys rachunku operatorowego", Wydawnictwa NaukowoTechniczne, Warszawa, 1972.
[72]
Palita A.K., Anheier W., Schloeffel J., “Estimation of signal integrity loss
through reduced order interconnect model”, Proc. of 7th Workshop on Signal
Propagation on Interconnects, Siena, Italy, 11-14 May 2003, pp.163-166.
[73]
Paul C.R., "Analysis of Multiconductor Transmission Lines", John Wiley &
Sons, 1994.
[74]
Pillage L.T., Rohrer R.A., “Asymptotic waveform evaluation for timing
analysis”, IEEE Trans. on CAD of Integr. Circuits and Syst, vol. 9, Issue 4,
Apr. 1990, pp. 352 – 366.
188
Literatura
[75]
Piwowarska E., “Propagation problems in VLSI circuits”, Proc. of 10th
International Conference Mixed Design of Integrated Circuits and Systems
MIXDES, Łódź, 2003.
[76]
Piwowarska E., “Simulation of on-chip interconnection effects in CMOS
circuits”, Proc. of the 6th International Conference The Experience of
Designing and Application of CAD Systems in Microelectronics, 2001.
[77]
Qi X., et al., “On-Chip inductance modeling and RLC extraction of VLSI
interconnects for circuit simulation”, Proc. Custom Integrat. Circuits Conf.,
2000.
[78]
Rabaey J.M., Chandrakasan A., Nikolic B., "Digital Integrated Circuits",
Prentice Hall, NJ, 2003.
[79]
Romeo
F.,
Santomauro
M.,
“Time-domain
simulation of
n coupled
transmission lines”, IEEE Trans. Microwave Theory and Techniques, vol.
MTT-35, Feb. 1987.
[80]
Roychowdhury J.S., Newton A.R., Pederson D.O., "Algorithms for the transient
simulation of lossy interconnect", IEEE Trans. on CAD of Integr. Circuits and
Syst., vol. 13, Issue 1, Jan. 1994, pp. 96 – 104.
[81]
Roychowdhury J.S., Pederson D.O., "Efficient transient simulation of lossy
interconnect", Design Automation Conference 1991, June 17-21, 1991, pp. 740
– 745.
[82]
Ruehli A.E., “Inductance calculations in a complex integrated circuit
environment”, IBM J. Res. Dev., Sept. 1972, pp. 470–480.
[83]
Sado D., Gajos K., "Analiza drgań dynamicznego układu z podwójnym
wahadłem o trzech stopniach swobody", Journal of Theoretical and Applied
Mechanics 2008, vol. 46 nr 1, s. 141 -- 156.
[84]
Sakurai T., “Closed-form expressions for interconnection delay, coupling, and
crosstalk in VLSI’s”, IEEE Trans. Electron Devices, vol. 40, no. 1, Jan. 1993,
pp. 118-124.
189
Literatura
[85]
Schutt-Aine J.E., Mittra R., "Scattering parameter transient analysis of transmission
lines loaded with nonlinear terminations", IEEE Trans. on Microwave Theory and
Techniques, vol. 36, Issue 3, March 1988, pp. 529 – 536.
[86]
Shivamoggi
B.K.,
“Perturbation
Methods
for
Differential
Equations”,
Birkhauser, Boston 2003.
[87]
Siebert W.McC. „Circuits, Signals, and Systems” The MIT Press Cambridge,
Massachusetts, 1986.
[88]
Signal Propagation on Interconnects, edited by Grabinski H, Nordholz P.,
Kluwer Academic Publishers, 1998.
[89]
Swaminathan M., Ege Engin A., "Power Integrity Modeling and Design for
Semiconductors and Systems", Prentice Hall, N.J., 2008.
[90]
Tummala R.R., Swaminathan, M., “Introduction to System-on-Package (SOP).
Miniaturization of the Entire System”, McGraw Hill, 2008.
[91]
Tutuianu B., Dartu F., Pileggi L., “An explicit RC-circuit delay approximation
based on the first three moments of the impulse response", Proc. IEEE/ACM
Design Automation Conf., 1996, pp. 611–616.
[92]
Venkatesan R., Davis J. A., Meindl J. D., “A physical model for the transient
response of capacitively loaded distributed rlc interconnects”, Proc. 39th
ACM/IEEE Design Automation Conf., 2002, pp. 763–766.
[93]
Venkatesan R., Davis J. A., Meindl J. D., “Compact distributed RLC
interconnect models—Part IV: Unified models for time delay, crosstalk and
repeater insertion”, IEEE Trans. Electron Devices, vol. 50, Apr. 2003, pp.
1094–1102.
[94]
Vidyasagar M., "Nonlinear Systems Analysis", SIAM, Philadelphia, 2002.
[95]
Wang S.G., Wang B., "An Example of Balanced Truncation Method and Its
Surprising Time Domain Performance", IEEE Conference on Cybernetics and
Intelligent Systems, 21-24 Sept. 2008, pp. 823 - 828.
190
Literatura
[96]
Weston D. A., "Electromagnetic Compatibility: Principles and Applications",
CRC Press, 2001.
[97]
Wong S-C., Lee G-Y., Ma D-J., "Modeling of Interconnect Capacitance, Delay
and Crosstalk in VLSI", IEEE Trans. on Semicond. Manufact., vol. 13, Febr.
2000, pp. 108-111.
[98]
www.intel.com/research/silicon
[99]
Wyatt J.L., "Circuit Analysis, Simulation and Design", Elsevier, North-Holland,
Amsterdam, 1987.
[100] Xiu L., "VLSI Circuit Design Methodology Demystified", John Wiley & Sons,
New Jersey, 2007.
[101] Xue T., Kuh E. S., Yu Q., “A sensitivity-based wiresizing approach to
interconnect optimization of lossy transmission line topologies”, Proc. IEEE
Multi-Chip Module Conf., Jan. 1996, pp. 117–121.
191