Piotr Posmykiewicz – Wykład z fizyki
1
Wykład 18
Pole magnetyczne.
Już przeszło 2000 lat temu Grecy zdawali sobie
sprawę z tego, iż pewien rodzaj kamieni (teraz zwane
Geograficzny biegun
Magnetyczny biegun
północny
południowyKompas
magnetytami) przyciąga kawałki żelaza. Istnieją zapiski,
że w dwunastym wieku używano magnesów w
nawigacji statków.
W 1269 Pierre de Maricourt odkrył, że jeżeli położyd
igłę na naturalny magnetyt posiadający kształt sfery, to
igła ustawi się wzdłuż linii, które przechodzą przez
punkty na przeciwległych koocach sfery. Punkty te
nazwał biegunami magnesu. Jeżeli sztabka magnesu
Magnetyczny biegun
Geograficzny biegun
północny
południowy
lub igła magnetyczna mogą się obracad, to jeden z ich
Rysunek 18.1
kooców ustawi się tak, że będzie wskazywał północ.
Koniec ten nazwano biegunem północnym (N), a drugi koniec – biegunem południowym (S).
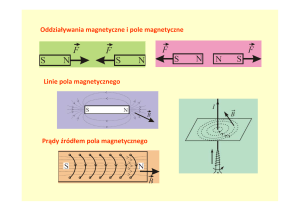
Zaobserwowano również, że jednakowe bieguny odpychają się, a różne przyciągają się nawzajem.
Sama Ziemia jest magnesem. Północny biegun magnetyczny znajduje się blisko południowego
bieguna geograficznego i dlatego igła magnetyczna kompasu wskazuje północ. Rysunek 18.1
przedstawia linie pola magnetycznego Ziemi.
18.1 Siły działające w polu magnetycznym.
Istnienie pola magnetycznego B ( B nosi nazwę wektora indukcji pola magnetycznego) w
dowolnym punkcie przestrzeni można zademonstrowad używając igły kompasu. Jeżeli pole
magnetyczne istnieje, to igła ustawi się w kierunku tego pola.
Piotr Posmykiewicz – Wykład z fizyki
2
Doświadczalnie stwierdzono, że jeżeli ładunek q ma prędkośd v w polu magnetycznym, to działa
na niego siła, która jest proporcjonalna do q i v i do sinusa kąta zawartego między v i B . Siła ta jest
zawsze prostopadła do prędkości ładunku i kierunku pola. Powyższą obserwację doświadczalną
można zapisad następująco:
𝐅 = 𝐪𝐯 × 𝐁
18.1
Siła działająca na ładunek elektryczny.
Ponieważ F jest prostopadłe zarówno do v jak i do B , to jest
prostopadłe również do płaszczyzny utworzonej przez te dwa wektory.
Zwrot siły F określony jest, jak wiadomo, regułą śruby prawoskrętnej
b. Prędkość 𝑣 jest równoległa
do pola magnetycznego 𝐵 .
Siła jest równa zero.
lub regułą prawej dłoni (Rysunek 19.2).
Równanie 18.1 jest jednocześnie definicją pola magnetycznego B .
Jednostką pola magnetycznego w układzie SI jest tesla (T). Ładunek
jednego kulomba poruszający się z prędkością jednego metra na
sekundę w kierunku prostopadłym do pola magnetycznego o wartości
jednej tesla podlega działaniu siły jednego niutona:
1T 1
N/C
1N / A s
m/s
a. v tworzy kąt ϕ z B.
Wartość siły wynosi
F = qvBsinϕ
.
2.
Jest to dośd duża jednostka. Pole magnetyczne Ziemi ma wartośd
mniejszą niż 10-4T. Pole magnetyczne magnesów stałych zawiera się w
przedziale 0,1 do 0,5T, elektromagnesy laboratoryjne i przemysłowe
wytwarzają pole magnetyczne o indukcji magnetycznej od 1 do 2T.
c. 𝑣 jest prostopadła do 𝐵 .
Wartość siły wynosi F = qvB
Rysunek 18.2
Jeżeli przez przewodnik znajdujący się w polu magnetycznym płynie
prąd, to oczywiście na taki przewodnik będzie działad siła będąca sumą . sił działających na
poruszające się ładunki tworzące ten prąd. Rysunek 18.3 przedstawia fragment przewodnika o
przekroju poprzecznym A i długości l przewodzący prąd o natężeniu I. Jeżeli przewodnik ten
znajduje się w polu magnetycznym o indukcji magnetycznej B , to siła działająca na każdy ładunek
jest równa qv d B , gdzie v d jest prędkością unoszenia ładunków (prędkośd dryfu). Ilośd ładunków
Piotr Posmykiewicz – Wykład z fizyki
3
w jednostce objętości jest równa koncentracji ładunków n razy Al. Tak, więc całkowita siła
działająca na odcinek przewodnika z prądem wyniesie:
F (qvd B)nAl
Ponieważ I = nqvdA (patrz wykład 17) F qv B , to:
𝐅 = 𝐈𝐥 × 𝐁
18.2
Siła działająca na przewodnik z prądem. Wzór Ampere’a.
gdzie
l jest wektorem, którego długośd jest równa długości
przewodnika, a zwrot jest taki sam jak kierunek prądu (Rysunek 18.4).
I
Jeżeli kierunek i wartośd pola magnetycznego zmienia się wzdłuż
przewodnika, to równanie 18.2 możemy uogólnid i zapisad w postaci:
dF I(d l B)
I
18.3
Rysunek 18.3
Wzór Ampere’a.
gdzie dl jest bardzo małym (nieskooczenie małym) odcinkiem
przewodnika z prądem, a dF jest siłą działającą na ten odcinek.
Całkowitą siłę działającą na dowolny odcinek przewodnika znajdziemy
sumując (całkując) siły pochodzące od małych odcinków, z których
składa się ten odcinek.
Podobnie jak pole elektryczne E , również pole magnetyczne B
możemy zobrazowad za pomocą linii sił pola magnetycznego. W obu
przypadkach kierunek pola magnetycznego jest określony przez
kierunek linii, a wielkośd indukcji magnetycznej B jest proporcjonalna
do gęstości linii. Istnieją jednak dwie zasadnicze różnice między
polami E i B :
Rysunek 18.4
Piotr Posmykiewicz – Wykład z fizyki
4
1. Linie pola elektrycznego pokrywają się z kierunkiem siły kulombowskiej działającej na
ładunek dodatni, podczas gdy linie pola magnetycznego są prostopadłe do siły
magnetycznej działającej na poruszający się ładunek.
2. Linie pola elektrycznego zaczynają się na ładunku
dodatnim i kooczą na ładunku ujemnym; linie
pola magnetycznego tworzą krzywe zamknięte.
Dlatego też nie istnieją pojedyncze bieguny
magnetyczne i nie istnieją nigdzie w przestrzeni
punkty
gdzie
linie
pola
magnetycznego
zaczynałyby się lub kooczyły.
Rysunek 18.5 przedstawia linie pola magnetycznego na
zewnątrz jak i wewnątrz sztabki magnesu.
Rysunek 18.5
18.2 Ruch ładunku punktowego w polu magnetycznym.
Siła działająca na naładowaną cząstkę poruszającą się w polu
magnetycznym jest zawsze prostopadła do jej prędkości. Siła ta, zatem
zmienia swój kierunek, ale nie wartośd. Zatem siła ta nie wykonuje żadnej
pracy, ani nie powoduje zmiany energii kinetycznej cząstki.
W szczególnym przypadku, gdy prędkośd jest prostopadła do
jednorodnego pola magnetycznego, jak pokazano na Rysunku 18.6,
cząstka porusza się po orbicie kołowej. Siła Lorentza (magnetyczna) jest w
Rysunek 18.6
tym wypadku siłą dośrodkową, nadającą konieczne przyspieszenie
dośrodkowe v2/r w ruchu po okręgu. Można zastosowad drugą zasadę dynamiki i powiązad promieo
orbity i prędkośd cząstki. Jeżeli prędkośd wynosi v , to wartośd siły dośrodkowej jest równa qvB,
ponieważ v i B są prostopadłe. Z II zasady dynamiki otrzymujemy:
F ma m
v2
r
Piotr Posmykiewicz – Wykład z fizyki
5
qvB
mv 2
r
lub
r
mv
qB
18.4
Jeżeli T jest okresem obrotu cząstki, to:
T
2r
v
Podstawiając 5. do powyższego otrzymujemy ostatecznie wzór na okres cyklotronowy:
T
2(mv / qB) 2m
v
qB
18.5
1
qB
T 2m
18.6
Częstotliwośd cyklotronowa to:
f
Należy zwrócid uwagę, że okres i częstośd (równania18.5, 18.6) zależą od stosunku ładunku do
masy q/m, ale nie zależą od promienia r i od prędkości v.
Na bazie powyższej analizy przedyskutujemy dalej kilka ważnych zastosowao ruchu ładunku
elektrycznego we jednorodnym polu magnetycznym.
Selektor prędkości.
Siła magnetyczna działająca na naładowaną cząstkę
𝒒𝒗𝑩𝒏
w jednorodnym polu magnetycznym może byd
zrównoważona
przez
siłę
elektryczną,
jeżeli
odpowiednio dobrad wielkośd i kierunek pola
elektrycznego. Z oczywistych względów, w takiej
sytuacji pole magnetyczne i elektryczne muszą byd
prostopadłe.
𝑬
𝒒
𝒗
𝒒𝑬
𝑩
Rysunek 18.7
Piotr Posmykiewicz – Wykład z fizyki
6
Na Rysunku 18.7 pokazany jest obszar, w którym przecina się pole elektryczne wytworzone przez
kondensator z polem magnetycznym wytworzonym przez magnes (jego bieguny znajdują się nad i
pod rysunkiem). Weźmy cząstkę o ładunku q, która wpada z prawej strony. Wypadkowa siła
działająca na cząstkę jest równa
𝐅 = 𝐪𝐄 + 𝐪𝐯 × 𝐁
18.7
Siła Lorentza.
Jeżeli ładunek q jest dodatni, to siła elektryczna działa do góry, a magnetyczna do dołu. Obie siły
równoważą się, jeżeli qE = vB, czyli gdy
v
E
B
18.8
𝐁
Dla danych wartości E i B, siły równoważą się tylko w
przypadku cząstek posiadających prędkośd daną wzorem 8..
Każda cząstka z taką prędkością będzie poruszad się wzdłuż
kondensatora nie odchylając się od pierwotnego kierunku.
Cząstki o innych prędkościach będą odchylane bądź w gorę
bądź w dół. Takie urządzenie jest używane często jako
segregator cząstek, który pozwala wydzielid z wiązki tylko te
Źródło
Rysunek 18.8.
cząstki mające określoną prędkośd.
Spektroskop masowy.
Spektroskop masowy, wynaleziony w 1919 roku, znalazł zastosowanie jako urządzenie pozwalające
mierzyd masę izotopów. Takie pomiary są istotne, ponieważ pozwalają ustalid zawartośd
procentową izotopów w złożach naturalnych. Na przykład stwierdzono, że złoża magnezu składają
się z 78,7%
24
Mg , 10,1%
25
Mg , 11,2%
26
Mg . Masy tych izotopów w przybliżeniu mają się do
siebie jak 24:25:26.
Rysunek 18.8 przedstawia uproszczony schemat spektroskopu masowego. Jony ze źródła jonów
są przyspieszane w polu elektrycznym, a następnie wpadają w pole magnetyczne. Jeżeli jony
Piotr Posmykiewicz – Wykład z fizyki
7
zaczynają ruch ze stanu spoczynku i przebywają różnicę potencjałów , to ich energia kinetyczna,
kiedy wpadają w pole magnetyczne jest równa stracie energii potencjalnej q :
1
mv 2 q
2
18.9
Jony poruszają się po półkolach o promieniach danych równaniem 5., r = mv/qB i uderzają w płytę
fotograficzną w punkcie P2, w odległości 2r od punktu, w którym wleciały w pole magnetyczne.
W celu znalezienia m/q w funkcji znanych wielkości , B i r należy wyeliminowad prędkośd v
korzystając z równania 18.5 i 18.9 W rezultacie znajdujemy:
m B2 r 2
q 2
18.10
Znając ładunek poruszającego się jonu i rejestrując r możemy wyznaczyd jego masę. Współczesne
spektroskopy masowe umożliwiają pomiar mas izotopów z dokładnością do 1/10000.
Cyklotron.
𝒗
Cyklotron jest urządzeniem służącym do przyspieszania cząstek takich
jak protony czy deuterony do dużych energii kinetycznych. Takie
wysokoenergetyczne cząstki są używane do bombardowania jąder
atomowych. Powoduje to zachodzenie reakcji jądrowych, które
następnie są analizowane i na ich podstawie otrzymuje się informacje
o badanych jądrach. Wysokoenergetycznych protonów i deuteronów
Rysunek 18.9
używa się również do wytwarzania materiałów radioaktywnych i w
celach medycznych.
Zasadę działania cyklotronu
można prześledzid korzystając z jego uproszczonego schematu
przedstawionego na Rysunku 18.9. Między biegunami silnego elektromagnesu umieszczona jest
komora próżniowa, w której znajdują się dwie elektrody (1 i 2) w postaci dwóch pustych
półcylindrów zwanych duantami. Do duant przykłada się zmienne pole elektryczne. Pole
magnetyczne wytwarzane przez elektromagnes jest jednorodne i prostopadłe do duant. Jeżeli
naładowaną cząstkę wprowadzid do środka przerwy między duantami, to zostanie ona
Piotr Posmykiewicz – Wykład z fizyki
8
przyspieszona w polu elektrycznym i następnie jej tor ulegnie zakrzywieniu w polu magnetycznym i
wychodząc z duanty 1 opisze półokrąg. W momencie jej wyjścia z duanty 1 polaryzacja pola zmieni
się na przeciwną i cząstka wpadając w przerwę między duantami znów ulegnie przyspieszeniu i
następnie zatoczy większy półokrąg w duancie 2 itd. Dla ciągłego przyspieszania cząstki należy w
cyklotronie zapewnid warunek synchronizacji – okresy obrotów cząstki i zmian pola elektrycznego
powinny byd jednakowe. Jeżeli warunek ten będzie spełniony, to cząstka będzie poruszad się po
rozkręcającej się spirali, otrzymując przy każdym przejściu między duantami nową porcję energii.
Przy koocu ostatniego zwoju, kiedy energia cząstek osiągnie maksymalną energię zostają one
wyprowadzane z cyklotronu za pomocą odchylającego pola elektrycznego.
Cyklotrony umożliwiają rozpędzenie protonów do energii około 20MeV. Dalsze ich przyspieszanie
w cyklotronie ograniczone jest relatywistycznym wzrastaniem masy wraz z prędkością. Powoduje to
zwiększenie okresu obrotów, który jak widad ze wzoru 6. jest proporcjonalny do masy. Dlatego
cyklotron jest całkowicie nieprzydatny do przyspieszania elektronów (dla E = 0,5MeV m = 2m 0).
Ciężkie cząstki można jednak przyspieszad do wyższych energii dzięki odmianom cyklotronu –
fazotronowi i synchrotronowi, w których to urządzeniach zmienia się albo częstośd pola
elektrycznego,
albo
indukcję
synchronicznie
wraz
z
magnetyczną
wzrastającą
masą
relatywistyczną.
18.3 Momenty sił działające na obwód z
P
prądem i na magnes.
Na obwód z prądem znajdujący się w jednorodnym
polu magnetycznym nie działa wypadkowa siła
magnetyczna, jednak podlega on działaniu momentu
Rysunek 18.10
siły, który próbuje go obrócid. Orientację obwodu w przestrzeni wygodnie jest opisywad, jeżeli
wprowadzimy jednostkowy wektor n , który jest prostopadły do obwodu a zwrot, którego określa
reguła prawej dłoni lub śruby prawoskrętnej (Rysunek 18.10).
Piotr Posmykiewicz – Wykład z fizyki
9
Rysunek 18.11 przedstawia siły wywierane na prostokątny obwód z prądem umieszczony w
jednorodnym polu magnetycznym. Wektor jednostkowy n tworzy z jednorodnym polem
magnetycznym o indukcji magnetycznej B kąt θ. Wypadkowa siła
𝐅𝟐
działająca na obwód jest równa zeru. Siły F1 i F2 mają wartośd: F1 =
𝛍
F2 = IaB.
𝐧
θ
Siły te tworzą parę sił, czyli moment sił jest jednakowy względem
θ
I
𝒃
𝐁
dowolnego punktu. Na rysunku 18.11 wybrano punkt P przyłożenia
siły po środku boku a (Rysunek 18.10). Wielkośd momentu sił
bsinθ
P
wynosi, zatem:
𝐅𝟏
τ = F2bsinθ = IaBbsinθ = IABsinθ
Rysunek 18.11.
gdzie A = ab jest polem powierzchni obwodu. Dla obwodu
składającego się z N zwojów moment siły będzie miał wartośd:
τ = NIABsinθ
Taki moment siły stara się obrócid obwód tak, aby jego płaszczyzna była prostopadła do 𝐁.
Moment siły można wygodnie zapisad posługując się pojęciem magnetycznego momentu
dipolowego 𝛍 (lub krótko momentu magnetycznego) dla obwodu z prądem, który zdefiniowany
jest jako:
𝛍 = 𝐍𝐈𝐀𝐧
18.11
Moment magnetyczny obwodu z prądem.
Uwaga: moment magnetyczny często oznacza się symbolem 𝐩𝐦.
Jednostką momentu magnetycznego jest amper metr2 (Am2).
Ogólnie moment siły działający na obwód z prądem możemy zapisad w postaci:
𝛕=𝛍×𝐁
Moment siły działający na obwód.
18.12
Piotr Posmykiewicz – Wykład z fizyki
10
Równanie 18.12 mimo, iż zostało wyprowadzone dla prostokątnego obwodu, jest prawdziwe dla
płaskiego obwodu o dowolnym kształcie. Dla obwodu o dowolnym kształcie moment magnetyczny
jest liczony jako iloczyn pola powierzchni obwodu i natężenia prądu, a zwrot jest określany tak jak
podaje to równanie 18.12.
Energia potencjalna dipola magnetycznego w polu magnetycznym.
Jeżeli moment sił powoduje obrót, wtedy wykonywana jest praca. Jeżeli dipol obróci się o kąt
dθ, to zostanie wykonana praca:
dW d B sin d
Znak minus oznacza pracę dodatnią, ponieważ moment siły stara się zmniejszyd θ. Porównując
ten przyrost pracy ze zmniejszeniem energii potencjalnej otrzymujemy
dU dW pBsin d ,
a po scałkowaniu
U pBcos U0
Jeżeli wybrad energię potencjalną jako równą zero, gdy θ = 900, to U0 = 0 i energię potencjalną
dipola można zapisad w postaci:
𝐔 = −𝛍𝐁𝐛𝐜𝐨𝐬𝛉 = −𝛍 ∙ 𝐁
18.13
Energia potencjalna dipola magnetycznego.
Jest to wzór na energię potencjalną dipola magnetycznego, gdy moment magnetyczny tworzy kąt θ
z wektorem indukcji pola magnetycznego.
Jeżeli umieścid mały kawałek stałego magnesu np. igłę magnetyczną w polu magnetycznym B , to
pole będzie wywierad moment siły na magnes, tak długo aż ustawi się on wzdłuż pola. Taki sam
efekt zaobserwujemy, gdy umieścimy w polu nienamagnesowany wcześniej opiłek żelaza
(namagnesuje się on pod wpływem przyłożonego pola). Mały magnes jest scharakteryzowany przez
moment magnetyczny 𝛍, skierowany od bieguna południowego do północnego. Zachowuje się on
tak samo jak obwód z prądem. Nie jest to przypadek. Przyczyną powstawania momentu
Piotr Posmykiewicz – Wykład z fizyki
11
magnetycznego w magnesie są prądy mikroskopowe wywołane ruchem elektronów w atomach
magnesu.
18.4 Efekt Halla.
Efektem Halla nazywamy powstanie w metalu lub półprzewodniku, w którym płynie prąd o gęstości
j i który umieszczony jest w polu magnetycznym o indukcji
B, pola elektrycznego w kierunku prostopadłym do B i j.
𝐅
Umieśdmy płytkę metalową z prądem o gęstości j w polu
magnetycznym B prostopadłym do j (Rysunek 18.12). Dla
𝐣
𝒗𝐯
kierunku gęstości j na rysunku, kierunek nośników prądu w
metalu – elektronów jest z prawa na lewo. Elektrony
doznają działania siły Lorentza (siły magnetycznej), która w
𝐁
Rysunek 18.12
tym wypadku skierowana jest do góry. W ten sposób na
górnej powierzchni płytki powstaje podwyższona koncentracja elektronów (ładuje się ona ujemnie),
a na dolnej powierzchni koncentracja elektronów maleje (ładuje się dodatnio).W rezultacie między
powierzchniami płytki powstanie poprzeczne pole elektryczne skierowane do dołu. Kiedy to pole E B
osiągnie wartośd taką, iż będzie równoważyd siłę Lorentza działającą na elektrony, wtedy wytworzy
się stan stacjonarnego rozdzielenia ładunków. Wtedy
eEB e / aevB
lub
vBa
gdzie a – szerokośd płytki, Δφ – poprzeczna różnica potencjałów Halla.
Uwzględniając, że I = jS = nevS (S - pole powierzchni przekroju poprzecznego płytki o grubości d, n –
koncentracja elektronów, v- prędkośd uporządkowanego ruchu elektronów), otrzymujemy
1
1 IB
IB
Ba
R
nead
en d
d
18.14
tzn. różnica potencjałów Halla jest proporcjonalna do Indukcji magnetycznej B, natężenia prądu i
odwrotnie proporcjonalna do grubości płytki. We wzorze 14. występuje stała Halla R = 1/(en)
zależąca od rodzaju materiału. Znając stałą R można 1) - określid koncentrację nośników prądu, 2) –
określid rodzaj przewodnictwa w półprzewodnikach, ponieważ znak stałej Halla pokrywa się ze
znakiem e nośników prądu.
Piotr Posmykiewicz – Wykład z fizyki
I
12
𝒅𝑩
18.5 Prawo Biota – Savarta.
P
Prawo Biota – Savarta dla przewodnika z prądem I, którego odcinek dl
𝒓
wytwarza w pewnym punkcie P (Rysunek 18.13) indukcję magnetyczną
𝒅𝒍
𝐝𝐁 zapisuje się w postaci:
Rysunek 18.13
𝐝𝐁 =
𝛍𝛍𝟎 𝐈𝐝𝐥×𝐫
𝐫𝟑
𝟒𝛑
18.15
Prawo Biota – Savarta
gdzie μ0 – przenikalnośd magnetyczna próżni, μ – względna przenikalnośd magnetyczna. Kierunek
𝐝𝐁 jest prostopadły do 𝐝𝐥 i 𝐫. Zwrot wektora 𝐝𝐁 może byd określony za pomocą reguły śruby
prawoskrętnej: jeżeli ruch postępowy śruby pokrywa się z kierunkiem prądu, to ruch obrotowy
pokrywa się ze zwrotem indukcji 𝐝𝐁. Co do wartości bezwzględnej dB jest równe:
Idl sin
dB 0
4
r2
18.16
gdzie α - kąt między 𝐝𝐥 i 𝐫.
Z doświadczenia wynika, że do pola magnetycznego, tak jak do pola elektrycznego stosuje się
zasada superpozycji:
Pole magnetyczne wytworzone przez kilka prądów lub poruszających się ładunków jest równe
jest równe sumie pól wytwarzanych przez każdy prąd lub poruszający się ładunek oddzielnie. W
rezultacie wektor indukcji magnetycznej w dowolnym punkcie pola wytworzonego przez
przewodnik z prądem I jest równa:
B dB
l
18.17
Piotr Posmykiewicz – Wykład z fizyki
13
gdzie 𝐝𝐁 – indukcja magnetyczna pola, wytworzona przez odcinek przewodnika dl. Całkowanie
zachodzi po całej długości przewodnika l.
Znajdź: 1. Wektor indukcji magnetycznej w odległości R od przewodnika (patrz: Rysunek 18.14a):
B
0 2I
4 R
18.18
R
𝐝𝐁, 𝐁
a)
Rysunek 18.14
b)
Znajdź: 2. Wektor indukcji magnetycznej w centrum okrągłego przewodnika o promieniu R
Rysunek 18.14b:
B 0
I
2R
18.6 Cyrkulacja wektora B pola magnetycznego w próżni. Prawo
Ampere’a.
Rysunek 18.15
Analogicznie do cyrkulacji wektora 𝐄 wprowadza się cyrkulację wektora 𝐁 wzdłuż zamkniętego
konturu L:
𝐋
𝐁𝐝𝐥 =
𝐋
𝐁𝐥 𝐝𝐥
18.19
Piotr Posmykiewicz – Wykład z fizyki
14
gdzie dl – wektor elementarnej długości konturu, skierowany wzdłuż kierunku obchodzenia
konturu, Bl = Bcosϕ – składowa wektora 𝐁 w kierunku stycznej do konturu, ϕ – kąt między
wektorami dl i 𝐁 (Rysunek 18.15).
Prawo Ampere’a: cyrkulacja wektora 𝐁 wzdłuż dowolnego konturu jest równa iloczynowi
przenikalności magnetycznej próżni μ0 i algebraicznej sumy prądów obejmowanych tym
konturem:
𝐋
𝐁𝐝𝐥 =
𝐋
𝐁𝐥 𝐝𝐥 = 𝛍𝟎
𝐧
𝐤=𝟏 𝐈𝐤
18.20
L – jest dowolnym konturem zamkniętym
gdzie – n ilośd przewodników objętych konturem L. Za dodatni
I1
I3
I2
I4
uważa się prąd, którego kierunek związany jest z kierunkiem
obchodzenia konturu zgodnie z regułą śruby prawoskrętnej;
przeciwny kierunek prądu przyjmuje się jako ujemny. Na przykład
dla układu prądów na rysunku 18.16:
I
k 1
k
L
Rysunek 18.16
I1 2I 2 0 I 3 I 4
Wzór 18.19 jest prawdziwy tylko dla pola w próżni, ponieważ dla pola w ośrodku należy
uwzględniad prądy mikroskopowe.
Obliczmy cyrkulację wektora 𝐁 dla pola wytworzonego przez prostoliniowy przewodnik, w
którym płynie prąd I prostopadle do płaszczyzny rysunku (Rysunek 18.17). Weźmy jako
zamknięty kontur okrąg o promieniu r. W każdym punkcie tego obwodu wektor B jest taki sam
co do wartości i styczny do okręgu. W wyniku tego cyrkulacja wektora 𝐁
będzie równa
B dl Bdl B dl B 2r
l
L
L
L
Zgodnie ze wzorem 3.20 otrzymujemy B 2r 0 I , skąd
B
0 I
2r
Rysunek 18.17
Piotr Posmykiewicz – Wykład z fizyki
15
W ten sposób otrzymaliśmy wyrażenie takie samo jak 18.18 wyprowadzone z prawa Biota –
Savarta.
Porównując cyrkulację wektora 𝐁 z cyrkulacją wektora 𝐄 widad zasadniczą różnicę: cyrkulacja
wektora𝐄 jest zawsze równa zero. Pole 𝐁 nazywamy wirowym, a pole 𝐄 bezwirowym.
Pokaż korzystając z prawa o cyrkulacji, że indukcja
magnetyczna wewnątrz
1) solenoidu wynosi:
B 0nI / l
18.21
gdzie n – ilośd zwojów, długośd solenoidu (patrz: Rysunek
16.18) i
Rysunek 18.18
2) toroidu wynosi:
B 0nI / 2r
gdzie r – średni promieo toroidu.
18.7 Strumieo wektora indukcji magnetycznej. Prawo Gaussa dla pola 𝐁.
Strumieniem wektora indukcji magnetycznej przez pole dA. nazywamy skalarną wielkośd
fizyczną równą:
𝑑Φ𝐵 = 𝐵⊥ 𝑑𝐴 = 𝐵𝑐𝑜𝑠𝜙𝑑𝐴 = 𝐵 ∙ 𝑑𝐴
18.22
gdzie 𝐵⊥ = Bcosϕ – rzut wektora 𝐁 na kierunek prostopadłej (normalnej) do powierzchni (ϕ –
kąt między n a B), d𝐴 = dAn– wektor, wartośd którego równa
𝒏
jest polu powierzchni, a zwrot pokrywa się z kierunkiem
normalnej n do powierzchni (Rysunek 16.19). Zwykle strumieo
wektora
𝐁
wprowadza
się,
gdy
wzdłuż
konturu
ograniczającego daną powierzchnię dA płynie prąd. W tym
przypadku dodatni kierunek normalnej do konturu określony
jest regułą śruby prawoskrętnej. W ten sposób, strumieo pola
Rysunek 18.19
magnetycznego obwodu z prądem przez powierzchnię rozpiętą na tym obwodzie jest zawsze
dodatni.
Strumieo wektora indukcji magnetycznej ΦB przez dowolną powierzchnię A
Piotr Posmykiewicz – Wykład z fizyki
𝚽𝐁 =
16
𝐁⊥ 𝐝𝐀 =
𝐁𝐜𝐨𝐬𝛟𝐝𝐀 =
𝐁 ∙ 𝐝𝐀
18.23
Strumieo wektora indukcji magnetycznej ΦB przez dowolną powierzchnię A
W przypadku pola jednorodnego i płaskiej powierzchni położonej prostopadle do B, B n = B =
const i
ΦB = BS
Ze wzoru tego określa się jednostkę strumienia – 1weber (Wb). 1Wb = 1T/1m2.
Prawo Gaussa dla pola B: Strumieo wektora indukcji magnetycznej przez dowolną powierzchnię
𝚽𝐁 =
zamkniętą jest równy zero:
𝐁⊥ 𝐝𝐀 =
𝐁 ∙ 𝐝𝐀 = 𝟎
18.24
Wniosek ten jest uogólnieniem faktu doświadczalnego, mówiącego, że w przyrodzie nie
występują ładunki magnetyczne (monopole) i tym samym, linie indukcji magnetycznej są
zamknięte.
18.8 Praca wykonana podczas przemieszczania przewodnika i konturu z prądem w
polu magnetycznym.
Na przewodnik z prądem w polu magnetycznym działają siły określone wzorem Ampere’a. Jeżeli
przewodnik nie jest umocowany, to pod wpływem siły Ampere’a
będzie się on przesuwad (Rysunek 18.19). W rezultacie pole
magnetyczne będzie wykonywad pracę podczas przemieszczania
dx
I
𝑩
𝑭
przewodnika z prądem.
Rozpatrzmy przewodnik o długości l, w którym płynie prąd I, i
który
może
się
swobodnie
poruszad
umieszczony
w
1
l
2
Rysunek 18.19
jednorodnym polu magnetycznym prostopadłym do rysunku. Dla
zaznaczonych na rysunku 18.19 kierunków siła Ampere’a jest skierowana na prawo i równa
F = IBl
Pod wpływem tej siły przewodnik przesunie się na odległośd dx z położenia 1 do 2. Praca wykonana
przez pole magnetyczne będzie równa
dW Fdx IBldx IBdS Id
18.25
Piotr Posmykiewicz – Wykład z fizyki
17
W ten sposób praca przy przemieszczeniu przewodnika z prądem w polu magnetycznym jest równa
iloczynowi natężenia prądu i strumienia indukcji magnetycznej przez pole zakreślone
przemieszczającym się przewodnikiem. Otrzymana zależnośd jest prawdziwa dla dowolnego
kierunku 𝐁.
Można udowodnid, że w przypadku przemieszczania zamkniętego konturu w zewnętrznym polu
magnetycznym praca przy przemieszczeniu jest równa iloczynowi natężenia prądu i zmianie
strumienia przez powierzchnię rozpiętą na tym konturze:
dW Id'
18.26
18.9 Momenty magnetyczne elektronów i atomów.
Aby opisad własności magnetyczne różnych ośrodków należy
rozpatrzyd najpierw wpływ pola magnetycznego na oddzielne atomy i
cząsteczki substancji.
Doświadczenie pokazuje, że wszystkie ciała umieszczone w polu
magnetycznym ulegają namagnesowaniu. Rozważymy przyczynę tego
𝒏
zjawiska z punktu widzenia budowy atomów i cząsteczek, biorąc pod
uwagę hipotezę Ampere’a zgodnie, z którą w każdym ciele istnieją
mikroskopowe prądy, wywołane ruchem elektronów w atomach i
Rysunek 18.20
cząsteczkach.
W celu jakościowego wyjaśnienia zjawisk magnetycznych wystarczy z dostatecznym
przybliżeniem przyjąd, iż elektron porusza się w atomie po orbitach kołowych. Elektron poruszający
się po jednej z takich orbit jest równoważny kołowemu prądowi i w związku z tym posiada orbitalny
moment magnetyczny 𝛍 = IA𝐧, którego wartośd bezwzględna wynosi
𝜇 = 𝐼𝐴 = 𝑒𝜈𝐴
18.27
gdzie I = eν – natężenie prądu, ν – częstośd obrotu elektronu po orbicie, A – powierzchnia orbity.
Jeżeli elektron obraca się przeciwnie do kierunku wskazówek zegara (Rysunek 18.20), to prąd
skierowany jest zgodnie z kierunkiem wskazówek zegara, a wektor 𝛍 , zgodnie z regułą śruby
prawoskrętnej skierowany jest prostopadle do płaszczyzny orbity do dołu.
Piotr Posmykiewicz – Wykład z fizyki
18
Z drugiej strony, poruszający się po orbicie elektron posiada moment pędu 𝐋 , którego wartośd
bezwzględna jest równa
L mvr 2mA
18.28
gdzie v = 2πrν, πr2 = A. Wektor 𝐋 , którego kierunek także określony jest regułą śruby
prawoskrętnej, nazywa się orbitalnym momentem pędu elektronu.
Z rysunku 18.20 wynika, że kierunki 𝛍 i 𝐋 są przeciwne, dlatego uwzględniając 18.27 i 18.27
otrzymujemy:
𝐞
𝛍 = − 𝟐𝐦 𝐋 = −𝐠𝐋
18.29
Związek między 𝛍 i 𝐋 .
gdzie wielkośd
𝑒
𝑔 = 2𝑚
18.30
nazywa się stosunkiem żyroskopowym momentów orbitalnych. Stosunek ten, ponieważ jest
określony przez e i m, jest jednakowy dla dowolnej orbity, mimo, iż wartości v i r dla różnych orbit
są różne.
Doświadczalne określenie stosunku żyroskopowego pokazało, iż jest on równy
g
e
m
a zatem dwa razy większy niż wielkośd dana wyrażeniem 18.30. W celu wyjaśnienia tej rozbieżności
założono, a później udowodniono, że oprócz momentów orbitalnych, elektron posiada własny
moment pędu Ls, który nazwano spinem. Spinowi odpowiada własny moment magnetyczny
S g S LS
18.31
Wielkośd gs nazywa się stosunkiem żyroskopowym momentu spinowego.
W ogólnym przypadku moment magnetyczny elektronu składa się z orbitalnego i spinowego
momentu magnetycznego. Z kolei moment magnetyczny atomu składa się z sumy momentów
magnetycznych elektronów i momentu magnetycznego jądra. Jednak moment magnetyczny jąder
Piotr Posmykiewicz – Wykład z fizyki
19
jest parę tysięcy razy mniejszy od momentów elektronów, dlatego można go zaniedbad. W
rezultacie całkowity moment magnetyczny atomu (cząsteczki) 𝛍 𝐚 równy jest sumie wektorowej
momentów magnetycznych elektronów wchodzących w skład atomu:
𝜇𝑎 =
𝜇+
𝜇𝑆
18.32
Należy zwrócid uwagę, że rozpatrując momenty magnetyczne posłużyliśmy się teorią klasyczną
nieuwzględniającą ograniczeo nakładanych na ruch elektronów, jakie daje teoria kwantowa. Nie jest
to jednak konieczne do dalszego objaśnienia własności magnetycznych substancji.
18.10 Diamagnetyzm i paramagnetyzm.
Każda substancja jest magnetykiem, oznacza to, że pod wpływem pola
𝐁
magnetycznego powstaje w niej określony moment magnetyczny. W celu
zrozumienia tego mechanizmu należy rozpatrzyd wpływ pola magnetycznego na
poruszające się w atomie elektrony.
𝛍
Dla prostoty załóżmy, że orbity są kołowe. Jeżeli orbita elektronu jest
zorientowana względem wektora 𝐁 w dowolny sposób, tworząc z nim kąt α
(Rysunek 18.21), to można udowodnid, iż zaczyna ona poruszad się w ten
Rysunek 18.21
sposób wokół 𝐁, że wektor momentu magnetycznego 𝛍 zachowując stały kąt α,
obraca się wokół kierunku 𝐁 z pewną prędkością kątową. Ruch taki w mechanice nazywa się
precesją.
W rezultacie orbity elektronowe atomu, pod wpływem zewnętrznego pola magnetycznego,
wykonują ruch precesyjny, który jest równoważny prądowi kołowemu. Ponieważ prąd ten jest
indukowany przez zewnętrzne pole magnetyczne, to zgodnie z regułą Lenza, w atomie pojawi się
składowa pola magnetycznego skierowana przeciwnie do pola zewnętrznego. Indukowane
składowe pól magnetycznych atomów (cząsteczek) dodają się i tworzą pole magnetyczne substancji,
które osłabia zewnętrzne pole magnetyczne. Efekt ten nazywa się diamagnetyzmem, a substancje
magnesujące się w zewnętrznym polu przeciwnie do kierunku pola nazywają diamagnetykami.
Dlatego też substancja diamagnetyczna będzie wypychana z pola magnetycznego.
Piotr Posmykiewicz – Wykład z fizyki
20
Jeżeli nie ma zewnętrznego pola, to diamagnetyk nie wykazuje własności magnetycznych, ponieważ
w tym wypadku momenty magnetyczne elektronów wzajemnie się znoszą i sumaryczny moment
magnetyczny atomu jest równy zeru. Do diamagnetyków zaliczają się liczne metale (na przykład Bi,
Ag, Au, Cu), większośd związków organicznych węgiel itd.
Ponieważ
zjawisko
diamagnetyzmu
jest
uwarunkowane
działaniem
zewnętrznego
pola
magnetycznego na elektrony substancji, to diamagnetyzm jest własnością wszystkich substancji.
Jednak oprócz substancji diamagnetycznych istnieją substancje paramagnetyczne, to jest takie
substancje, które magnesują się zgodnie z kierunkiem pola.
W paramagnetycznych substancjach pod nieobecnośd pola magnetycznego moment magnetyczny
elektronów nie ulega kompensacji i atomy (cząsteczki) posiadają cały czas moment magnetyczny.
Jednak z powodu ruchu cieplnego cząsteczek ich momenty magnetyczne są zorientowane w sposób
nieuporządkowany. Dlatego też paramagnetyki nie posiadają własności magnetycznych. Jeżeli
jednak wprowadzid paramagnetyk w zewnętrzne pole magnetyczne, to ustala się stan, w którym
większośd momentów magnetycznych będzie ustawionych zgodnie z polem. W rezultacie
paramagnetyk magnesuje się, wytwarzając swoje własne pole, pokrywające się z kierunkiem pola
zewnętrznego i wzmacniające je. Zjawisko to nosi nazwę paramagnetyzmu. Do paramagnetyków
zaliczamy pierwiastki ziem rzadkich, Pt, Al., itd. Zjawisko diamagnetyzmu występuje również w
paramagnetykach, jednak jest ono dużo słabsze i nie ma wpływu na własności paramagnetyczne
substancji. Substancje paramagnetyczne są wciągane w pole magnetyczne.
18.11 Namagnesowanie. Pole magnetyczne w materii.
Podobnie do dielektryków (wektor polaryzacji) w do opisania własności magnetycznych substancji
wprowadza się wielkośd wektorową – namagnesowanie, która jest zdefiniowana jako moment
magnetyczny jednostki objętości magnetyka:
𝐌=
gdzie 𝜇𝑐𝑎ł𝑘 =
𝛍𝐜𝐚ł𝐤
𝐕
=
𝛍𝐚𝐭𝐨𝐦
𝐕
18.33
𝜇𝑎𝑡𝑜𝑚 - namagnesowanie (moment magnetyczny magnetyka), będący sumą
wektorową momentów magnetycznych poszczególnych cząsteczek.
Piotr Posmykiewicz – Wykład z fizyki
21
Wektor indukcji magnetycznej 𝐁 charakteryzuje wypadkowe pole wytworzone zarówno przez
prądy makroskopowe jak i prądy mikroskopowe. Do scharakteryzowania pola wytworzonego przez
makroskopowe prądy wprowadza się wektor natężenia pola H. Pole magnetyczne w materii składa
się z dwóch pól: pola zewnętrznego wytwarzanego przez na przykład przez prąd płynący w
uzwojeniu elektromagnesu i pola wytwarzanego przez namagnesowaną substancję. W takim
przypadku wektor indukcji magnetycznej wypadkowego pola w magnetyku można przedstawid jako
sumę indukcji magnetycznej pola zewnętrznego 𝐁𝟎 i pola mikro prądów 𝐁′:
𝐁 = 𝐁𝟎 + 𝐁′
18.34
gdzie 𝐁𝟎 = 𝛍𝟎 𝐇.
W celu opisania pola wytwarzanego przez prądy cząsteczkowe rozpatrzmy magnetyk w postaci
cylindra o polu przekroju A i długości l wprowadzony w jednorodne pole
o indukcji 𝐁𝟎 . Powstające w magnetyku pole pochodzące od prądów
I’
cząsteczkowych będzie skierowane przeciwnie do zewnętrznego pola w
przypadku diamagnetyków i zgodnie z polem dla paramagnetyków.
Płaszczyzny wszystkich prądów cząsteczkowych leżą w płaszczyźnie
prostopadłej do wektora 𝐁𝟎 , ponieważ ich momenty magnetyczne są
albo antyrównoległe do 𝐁𝟎 (w przypadku diamagnetyków), albo
Rysunek 18.22
równoległe do 𝐁𝟎 (w przypadku paramagnetyków). Jeżeli wziąd dowolny
przekrój prostopadły do osi, to w wewnętrznych częściach przekroju magnetyka prądy
cząsteczkowe sąsiednich atomów są skierowane naprzeciw siebie i wzajemnie się znoszą (Rysunek
18.22). Nieskompensowane będą tylko prądy cząsteczkowe, które wychodzą na boczną
powierzchnię cylindra.
Prąd płynący po bocznej części cylindra jest analogiczny z prądem płynącym przez solenoid i
wytwarza on pole magnetyczne o indukcji magnetycznej 𝐁′ o wartości określonej wzorem 18.21 (n
= 1 – solenoid o jednym zwoju)
𝐵′ =
𝜇 0 𝐼′
𝑙
gdzie I’ – natężenie wypadkowego prądu cząsteczkowego.
18.35
Piotr Posmykiewicz – Wykład z fizyki
22
Z drugiej strony I’/l jest gęstością liniową prądu, w związku z tym możemy zapisad jego moment
magnetyczny w postaci:
𝜇=
I’lA
𝑙
=
I’V
𝑙
gdzie V – objętośd magnetyka. Jeżeli μcałk jest całkowitym momentem magnetyka, to μcałk/V jest,
zgodnie z określeniem 18.33, namagnesowaniem M:
𝑀=
𝐼′
18.36
𝑙
Porównując 18.34. i 18.35. otrzymujemy: B′ = μ0 M
lub w postaci wektorowej:
𝐁 ′ = 𝛍𝟎 𝐌
Podstawiając wzory na B0 i na B’ do 18.34 otrzymujemy:
𝐁 = 𝛍𝟎 𝐇 + 𝛍𝟎 𝐌
18.37
Pole magnetyczne wewnątrz magnetyka.
Jak pokazuje doświadczenie, namagnesowanie w niezbyt silnych polach jest wprost
proporcjonalne do natężenia pola powodującego namagnesowanie:
𝐌 = 𝛘𝐇
18.38
gdzie χ – wielkośd bezwymiarowa, zwana podatnością magnetyczną materiału. Dla diamagnetyków
χ jest ujemne, dla paramagnetyków dodatnie.
Wykorzystując wzór 18.38. można związek 18.37. przepisad w formie:
𝐁 = 𝛍𝟎 𝟏 + 𝛘 𝐇
18.39
Bezwymiarowa wielkośd:
𝝁=𝟏+𝝌
18.40
jest względną przenikalnością magnetyczną lub krócej przenikalnością magnetyczną substancji.
Podstawiając 18.40 do 18.39 otrzymujemy:
𝐁 = 𝛍𝟎 𝛍𝐇
18.41
Ponieważ podatnośd magnetyczna dla diamagnetyków i paramagnetyków jest bardzo mała (rzędu
10-4 – 10-6), to wartośd μ niewiele różni się od jedności. Na przykład dla aluminium χ = 2,2 x 10-5
Podsumowując: dla diamagnetyków χ < 0 i μ < 1, dla paramagnetyków χ > 0 i μ > 1.
Piotr Posmykiewicz – Wykład z fizyki
23
18.12 Ferromagnetyki i ich własności.
Oprócz diamagnetyków i paramagnetyków istnieją jeszcze materiały
charakteryzujące się silnymi własnościami magnetycznymi zwane
ferromagnetykami. Ferromagnetyki charakteryzują się polaryzacją
a. Brak pola
spontaniczną, która występuje nawet jeżeli nie ma zewnętrznego pola
magnetycznego. Polega ona na silnym oddziaływaniu momentów
dipolowych atomów między sobą, co powoduje, że ulegają one
uporządkowaniu
b. Słabe pole
w
stosunkowo
dużych
obszarach
zwanych
domenami magnetycznymi. Wewnątrz domeny prawie wszystkie
momenty magnetyczne są równoległe.
Kiedy nie ma zewnętrznego pola, wtedy orientacja domen jest
c. Silne pole
Rysunek 18.23
całkowicie przypadkowa. Jednak w przypadku pojawienia się
zewnętrznego pola magnetycznego 𝐇, domeny starają się ustawid
równolegle
do
pola.
Oprócz
tego
granice
domen
ulegają
przemieszczeniom tak, że domeny zorientowane wzdłuż pola rozrastają się koszem domen
zorientowanych inaczej(Rysunek 18.23). Do ferromagnetyków,
oprócz ich głównego przedstawiciela – żelaza, zaliczamy kobalt,
M
Mnas
nikiel, gadolin i ich stopy i związki.
Ferromagnetyki posiadają jeszcze jedną własnośd różniącą je od
innych magnetyków. Podczas gdy zależnośd 𝐌 od 𝐇 dla
H
Rysunek 18.24
diamagnetyków i paramagnetyków jest liniowa, to dla ferromagnetyków zależnośd ta ma charakter
złożony (Rysunek 18.24). W miarę wzrastania H namagnesowanie M na początku rośnie szybko,
potem wolniej, i na koniec osiąga stan nasycenia Mnas, który nie zależy już od wartości H. Taki
charakter zależności M od H można wyjaśnid tym, że w miarę zwiększania pola magnesującego
zwiększa się stopieo orientacji cząsteczkowych momentów magnetycznych wzdłuż pola, jednak
proces ten ulega spowolnieniu w miarę jak zostaje coraz mniej momentów magnetycznych, które
nie są jeszcze uporządkowane, aż na koniec, kiedy wszystkie momenty są zorientowane wzdłuż
pola, J przestaje wzrastad i ferromagnetyk osiąga stan nasycenia. Indukcja magnetyczna B = μ0( H +
Piotr Posmykiewicz – Wykład z fizyki
B
24
M) rośnie szybko, jeżeli natężenie pola H jest małe, a dla dużych
wartości H wzrasta liniowo, ponieważ druga składowa jest stała
(M = MNAS) (Rysunek 18.25).
Ważną cechą szczególną ferromagnetyków, oprócz dużej
H
Rysunek 18.25
wartości względnej przenikalności magnetycznej – μ (dla żelaza
– 5000) jest zależnośd μ od H (Rysunek 18.26). Początkowo μ rośnie wraz ze wzrostem H, następnie,
po osiągnięciu wartości maksymalnej, zaczyna maled dążąc
μ
dla silnych pól do 1 (μ = B/( μ0H) = 1+M/H, dlatego przy M =
MNAS, wraz ze wzrostem H stosunek M/H 0, a μ 1).
Charakterystyczną cechą ferromagnetyków jest również to, że
zależnośd M od H (a zatem B od H) jest określona
1
niejednoznacznie, a zależy od historii ferromagnetyka.
H
Rysunek 18.26
Zjawisko to nosi nazwę histerezy magnetycznej. Jeżeli
namagnesowad ferromagnetyk do stanu nasycenia (punkt 1 na rysunku 18.27), a następnie zacząd
zmniejszad natężenie H, to jak pokazuje doświadczenie, zmniejszanie M opisane jest krzywą 1-2,
leżącą wyżej niż krzywa 0-1. Dla H = 0 M jest różne od 0 – w ferromagnetyku obserwuje się
namagnesowanie resztkowe Mre. Z występowaniem namagnesowania resztkowego związane jest
istnienie magnesów stałych. Namagnesowanie osiąga wartośd zero pod wpływem pola Hkoe,
mającego kierunek przeciwny do pola powodującemu namagnesowanie. Hkoe nazywa się polem
koercji. Dalsze zwiększanie pola powoduje przemagnesowanie ferromagnetyka (krzywa 3-4) i przy H
= -Hnas jest osiągany punkt nasycenia. Następnie ferromagnetyk można ponownie rozmagnesowad
(krzywa 4-5-6) i przemagnesowad do stanu nasycenia (krzywa 6-1).
W ten sposób, przy przykładaniu do ferromagnetyka zmiennego pola namagnesowanie M zmienia
się wzdłuż krzywej 1-2-3-4-5-6-1, która nazywa się pętlą
M
histerezy (od greckiego słowa „opóźnianie”).
Mnas
Różne ferromagnetyki dają różne pętle histerezy (Rysunek
2
1
Mre
18.28). Ferromagnetyki o małym (w przedziale od tysięcznych
części do 1-2A/cm) polu koercji Hkoe nazywamy miękkimi, o
dużym (od kilkudziesięciu do kilku tysięcy amperów na
-Hnas -Hkoe 3
6
0
Hkoe Hnas
centymetr) polu koercji Hkoe nazywamy twardymi. Wielkości
-Mre
4
5
-Mnas
Rysunek 18.27
H
Piotr Posmykiewicz – Wykład z fizyki
25
Hkoe, Mre, i μ0 determinują takie lub inne zastosowanie ferromagnetyków. Tak na przykład
ferromagnetyki twarde (stale węglowe lub wolframowe) wykorzystuje się do budowy magnesów
stałych, a ferromagnetyki miękkie (miękkie żelazo, stop żelaza z niklem), są wykorzystywane do
budowy rdzeni transformatorów.
Ferromagnetyki posiadają jeszcze jedną własnośd: dla każdego ferromagnetyka istnieje określona
temperatura zwana punktem Curie, przy której traci on swoje magnetyczne własności. Podczas
ogrzewania
powyżej
punktu
ferromagnetyk
się
próbki
w
M
M
M
Curie
zmienia
zwykły
H
H
H
paramagnetyk. W stanie
tym
jego
podatnośd
magnetyczna opisywana
jest
prawem
Curie
b. Ferromagnetyk łatwiejszy
c. Ferromagnetyk twardy,
trudny do rozmagnesowania. do rozmagnesowania.
–
a. Ferromagnetyk miękki
łatwy do rozmagnesowania.
Rysunek 18.28
Weisa:
𝐂
𝛘 = 𝐓−𝐓
𝐂
18.42
gdzie C – stała Curie, charakterystyczna dla danego materiału, TC – temperatura Curie. Przejściu
substancji ze stanu ferromagnetyka w paramagnetyk nie towarzyszy pochłanianie ani wydzielanie
ciepła. Mówimy o takim przejściu jako o przejściu drugiego rodzaju.