5.
Napór hydrostatyczny i równowaga ciał pływających
Płyn znajdujący się w stanie równowagi oddziaływuje na ściany ograniczające
rozpatrywaną jego objętość i siły te nazywane są naporami hydrostatycznymi. Omawiana
problematyka ma wiele praktycznych zastosowań, przy czym tematykę niniejszego wykładu
ograniczymy do zagadnień dotyczących obliczania naporów na ściany zbiorników
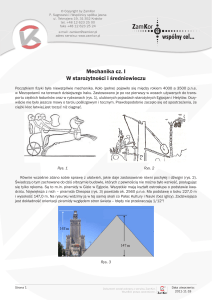
zawierających ciecze jednorodne. Na rys. 5.1 pokazano zbiornik otwarty zawierający ciecz
wywierającą napór, który od strony wewnętrznej jest sumą naporów pochodzących od ciśnień
atmosferycznego i hydrostatycznego, podczas gdy od zewnątrz działa jedynie napór
atmosfery.
II
napór atmosferyczny
III
napór cieczy - wypadkowy
( hydrostatyczny )
napór atmosferyczny
Rys.5.1.
I
Napór hydrostatyczny na ściany zbiornika.
Ponieważ działające z obu stron ściany napory od ciśnienia atmosferycznego
równoważą się, stąd też w dalszych rozważaniach uwzględniać będziemy tylko napór
hydrostatyczny, który jest siłą wypadkową pochodzącą od ciśnienia hydrostatycznego. Biorąc
pod uwagę, że ciśnienie hydrostatyczne zmienia się wraz z głębokością obliczenia naporu
wymagałoby w ogólnym przypadku całkowania naporów elementarnych z uwzględnieniem
wielkości powierzchni i przestrzennej orientacji ścian. Dla uproszczenia rozważymy jednak
trzy oddzielne przypadki, które wydzielić możemy zgodnie z rys. 5.1:
napór na poziome ściany płaskie
napór na ściany płaskie zorientowane dowolnie, przy czym przypadkiem szczególnym
może być napór na pokazaną na rys. 5.1 płaską ścianę pionową
napór na ściany zakrzywione przestrzennie, którego szczególnym przypadkiem może
być ściana z krzywizną w jednej tylko płaszczyźnie (patrz rys. 5.1).
Wyprowadzone w ten sposób zależności pozwolą na obliczenie naporów na ściany o
dowolnym kształcie, w których zawsze wydzielić będziemy mogli jeden lub więcej
powyższych przypadków.
5.1.
Napór cieczy na powierzchnie płaskie poziome
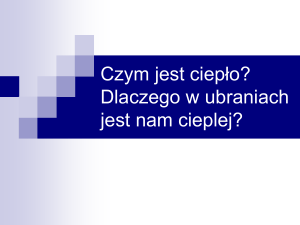
Przypadek ten jest z pewnością najprostszy, gdyż rozpatrywana powierzchnia F
pokazana na rys. 5.2 leży na powierzchni ekwipotencjalnej, co oznacza z kolei, że na całej
powierzchni mamy tę samą wartość ciśnienia hydrostatycznego. Napór hydrostatyczny
wywierany na powierzchnię płaską F przez warstwę cieczy o gęstości ρ i wysokości h
będzie zgodnie z rys. 5.2 równy sile wypadkowej:
N = ρ⋅g ⋅h ⋅F
(5.1)
88
Oznacza to, że napór cieczy na płaskie, poziome dno zbiornika jest równy iloczynowi
ciśnienia hydrostatycznego i pola powierzchni, przy czym wypadkowa siła N tego naporu
jest oczywiście przyłożona w środku geometrycznym (środku ciężkości) powierzchni F i
skierowana pionowo w dół.
pa
ρ
V
h
N
F (powierzchnia)
pa
Rys.5.2.
Napór cieczy na płaską poziomą powierzchnię.
W zależności 5.1 występuje iloczyn
V = F ⋅ h
będący objętością słupa cieczy o polu podstawy równym powierzchni dna i wysokości równej
głębokości zanurzenia powierzchni, co pozwala przekształcić wz. (5.1) do postaci:
N = ρ ⋅ g ⋅ V
(5.2)
która opisuje napór jako ciężar objętości V cieczy znajdującej się nad rozpatrywaną
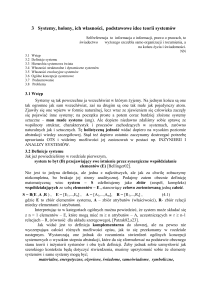
powierzchnią. Błędem byłoby jednak utożsamienie naporu N z ciężarem cieczy znajdującej
się w naczyniu, o czym przekonać może rys. 5.3 przedstawiający trzy różne zbiorniki o tym
samym polu powierzchni dna i napełnione cieczą o gęstości ρ do tej samej wysokości h .
a)
b)
V
V
c)
V
h
F
Rys.5.3.
N1
F
N2
F
N3
Paradoks Stevina dotyczący naporu na dno zbiornika.
Mimo, iż w każdym ze zbiorników mieszczą się różne objętości cieczy, to napór na dno jest w
każdym przypadku jednakowy, tzn.:
N1 = N 2 = N 3 = ρ ⋅ g ⋅ h ⋅ F
Związek ten ilustruje paradoks Stevina o niezależności siły naporu na dno naczynia od ilości
cieczy zawartej w zbiorniku. Zależność (5.2) będzie natomiast poprawnie określać wielkość
siły naporu na dno, jeżeli przez V rozumieć będziemy objętość pozorną cieczy zawartej nad
dnem określoną jako objętość słupa cieczy o polu podstawy równym powierzchni dna i
wysokości równej wysokości napełnienia zbiornika. Objętości pozorne cieczy zaznaczono na
rys. 5.3 przez ich zakreskowanie, przy czym zauważyć można, że na rys. 5.3a objętość
89
pozorna jest równa, na rys. 5.3b mniejsza a na rys. 5.3c większa od rzeczywistej objętości
cieczy zawartej w zbiorniku. Oprócz zatem definicji zapisanej wz. (5.1) można również
wielkość naporu N wyrazić jako ciężar pozornej objętości cieczy zawartej nad dnem, co
zapisano jako wz. (5.2).
5.2.
Napór cieczy na powierzchnie płaskie dowolnie zorientowane
a)
b)
α
N
N
c)
N1
N2
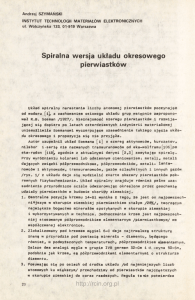
Rys.5.4.
Przykłady prostych i złożonych geometrii płaskich ścian zbiorników.
Zagadnienie określenia naporu na płaską pionową ścianę przedstawione na rys. 5.4a,
jest szczególnym przypadkiem konfiguracji geometrycznej przedstawionej na rys. 5.4b, w
której niewiadomymi są wielkość i miejsce przyłożenia naporu na ścianę płaską dowolnie
zorientowaną. Jeżeli kąt α określający na rys. 5.4b orientację płaskiej ściany oraz kształt i
powierzchnię ściany potraktujemy jako wielkości zmienne, wówczas uzyskane rozwiązanie
będzie mogło być zastosowane do opisu naporów działających zarówno na pojedyncze ściany
płaskie jak i układy takich ścian, czego przykład pokazano na rys. 5.4c.
Dla opisu tego zagadnienia rozważmy powierzchnię F pokazaną na rys. 5.5, gdzie
kartezjański układ współrzędnych x , y, z został wybrany w taki sposób, że płaszczyzna xy
pokrywa się ze swobodną powierzchnią cieczy a oś z skierowana jest zgodnie z kierunkiem
działania sił ciężkości . Powierzchnia F leży w płaszczyźnie x1y tworzącej z płaszczyzną xy
kąt α . Na powierzchni F wybieramy małe otoczenie dF dowolnie położonego punktu A ,
którego głębokość zanurzenia wynosi z . Elementarny napór działający na otoczenie punktu
A wynosi:
→
dN =
→
n ⋅ p ⋅ dF
→
gdzie n jest wersorem powierzchni dF natomiast p jest ciśnieniem hydrostatycznym w
punkcie A , co pozwala zapisać:
→
dN =
→
n ⋅ ρ ⋅ g ⋅ z ⋅ dF
90
(5.4)
i
x
α
=x
α
y=j
n
X1
dN
dF
y
A
x1
F
i=x
n
z
j=y
n
α
α
k
X1
z=k
Rys.5.5.
Sposób wyznaczania naporu hydrostatycznego na ścianę płaską dowolnie
zorientowaną.
Wszystkie napory elementarne działające na otoczenie punktów składające na powierzchnię
F są równoległe do siebie i skierowane w tę samą stronę, co pozwala zapisać napór całkowity
na powierzchnię F jako wypadkową będącą sumą wektorów równoległych, tzn.:
→
→
N = ∫ n ⋅ ρ ⋅ g ⋅ z ⋅ dF
F
lub po przekształceniach:
→
N =
→
ρ ⋅ g ⋅ n ∫ zdF
(5.4)
F
Moduł wypadkowego naporu hydrostatycznego wynosi:
→
N
= N = ρ ⋅ g ∫ zdF
(5.4a)
F
a jego składowe na poszczególne osie współrzędnych są równe:
→ →
N x = ρ ⋅ g ∫ z cos n ; i dF
F
→
→
N y = ρ ⋅ g ∫ z cos n ; j dF
(5.5)
F
→ →
N z = ρ ⋅ g ∫ z cos n ; k dF
F
Wzajemne relacje między poszczególnymi kierunkami pokazane na rys. 5.5 pozwalają
zapisać:
→ →
π
cos n ; i = cos + α = − sin α
2
π
→ →
cos n ; i = cos
= 0
2
→ →
cos n ; k = cos α
co po podstawieniu do wz. (5.5) daje:
N x = ρ ⋅ g ⋅ sin α ∫ zdF
F
91
Ny
= 0
Nz
= ρ ⋅ g ⋅ cos α ∫ zdF
F
Wyrażenie:
∫ zdF
F
jest momentem statycznym pola F względem płaszczyzny xy (zwierciadła cieczy) i może
być zapisane jako:
∫ zdF = z c ⋅ F
F
gdzie z c jest odległością środka geometrycznego (środka ciężkości) pola F od zwierciadła
cieczy, czyli głębokością zanurzenia środka ciężkości pola F . Podstawienie tej zależności do
wzorów określających składowe siły naporu pozwala zapisać:
N x = − ρ ⋅ g ⋅ z c ⋅ F ⋅ sin α
Ny = 0
N z = ρ ⋅ g ⋅ z c ⋅ F ⋅ cos α
co daje następujące wyrażenie na całkowitą siłę naporu:
N =
N 2x + N 2y + N 2z
= ρ ⋅ g ⋅ zc ⋅ F
(5.6)
Oznacza to, że napór hydrostatyczny na dowolnie zorientowaną powierzchnię płaską jest
iloczynem ciśnienia hydrostatycznego panującego w środku ciężkości i pola rozpatrywanej
powierzchni.
a)
b)
N
V
N
zc zN
N
zc
∆z ?
SC
F
SN
F
SC
zN
∆z
SN
Rys.5.6.
Wypadkowy napór hydrostatyczny na powierzchnię płaską a)
przyłożenia b).
i punkt jej
Jeżeli wyobrazimy sobie, że powierzchnia F jest podparta punktowo w środku
ciężkości, wówczas niezależnie od ustawienia powierzchni wielkość siły naporu będzie
niezmienna, bo przecież niezmienne będzie ciśnienie hydrostatyczne w środku ciężkości
(punkt podparcia) i pole powierzchni. W skrajnym przypadku, gdy ustawimy powierzchnię F
poziomo (patrz rys. 5.6a) wówczas otrzymamy wyrażenie identyczne ze wz. (5.2) bo przecież
dla powierzchni poziomej zapisać można:
zc ⋅ F = V
co łatwo sprawdzić przez podstawienie powyższej relacji do (5.6).
Gdy rozpatrywaliśmy napory na powierzchnie płaskie poziome, wówczas punktem
przyłożenia siły wypadkowej był oczywiście środek ciężkości SC zaznaczony na rys. 5.6a.
Dla powierzchni płaskiej nachylonej, wielkość siły naporu liczymy identycznie jak dla
powierzchni poziomej, tzn. jako iloczyn pola powierzchni i ciśnienia hydrostatycznego w
środku ciężkości powierzchni. Dla powierzchni płaskiej dowolnie zorientowanej zależność
(5.6) określająca siłę naporu daje nam wielkość siły wypadkowej jako sumę elementarnych
92
naporów pokazanych na rys. 5.6b, ale z rysunku tego widać, że punkt przyłożenia tej siły
musi leżeć na głębokości z N większej niż wynosi zanurzenie środka ciężkości, tzn.
z N > zc
Jeżeli zatem dla wyznaczania naporu potrzebna jest znajomość ciśnienia w środku ciężkości
SC zanurzonym na głębokości z c , to wypadkową siłę naporu należy przyłożyć w punkcie
SN zwanym środkiem naporu, który zanurzony jest na głębokości z N .
Współrzędne punktu SN wyznaczymy z warunku równowagi momentów w
płaszczyźnie x1y dla której zapisać można następujący związek między głębokością
zanurzenia punktu z i współrzędną x1 (patrz rys. 5.5):
z = x1 sin α
(5.7)
Warunek równowagi momentów przyjmuje postać:
N ⋅ x1N = ∫ ρ ⋅ g ⋅ x1 ⋅ z ⋅ dF
F
a po uwzględnieniu wz. (5.4a) i (5.7):
x1N ⋅ ρ ⋅ g ⋅ sin α ∫ x1dF = ρ ⋅ g ⋅ sin α ∫ x12dF
F
F
skąd ostatecznie otrzymujemy wyrażenie na odległość środka naporu SN od osi y :
2
∫ x1 dF
=
x1 N
F
∫ x1 dF
(5.8)
F
Mianownik tego ułamka jest statycznym momentem pola F względem osi y oznaczanym
zazwyczaj M y , który równy jest iloczynowi pola i odległości jego środka ciężkości od osi y ,
tzn.:
∫ x1dF = M y
F
= F x1c
Wyrażenie występujące w liczniku wz. (5.8) jest geometrycznym momentem bezwładności
pola F względem osi y oznaczanym I y , który zgodnie z twierdzeniem Steinera zapisać
możemy:
2
2
∫ x1 dF = I y = Is + F ⋅ x1c
F
gdzie moment bezwładności względem osi przechodzącej przez środek ciężkości Is może być
zapisany jako iloczyn powierzchni i kwadratu ramienia bezwładności i s , tzn.:
I y = F ⋅ i s2 + F ⋅ x12c
Podstawienie wyrażeń określających geometryczny i statyczny moment pola F do wz. (5.8)
pozwala zapisać odległość środka naporu od osi y następująco:
x1 N
=
F ⋅ i s2 + F ⋅ x12c
F ⋅ x1c
skąd po przekształceniach:
i s2
x1N = x1c +
(5.9)
x1c
Ponieważ drugi człon powyższego wyrażenia będący różnicą rzędnych punktów SN i SC
jest zawsze dodatni, tzn.:
is2
> 0
x1c
stąd też możemy stwierdzić, że punkt przyłożenia środka naporu jest zawsze położony w
większej odległości od osi y niż środek ciężkości.
93
Znacznie łatwiejszym w interpretacji będzie przejście ze współrzędnej x1 na współrzędną z
określającą głębokość zanurzenia punktu naporu, którą obliczyć można jako:
i2
z N = x1N ⋅ sin α = x1c sin α + s sin α
x1c
a po przekształceniach:
i s2
z N = zc +
sin α
(5.10)
zc
Otrzymujemy więc potwierdzenie, że w przypadku ścian płaskich dowolnie zorientowanych
środek naporu położony jest zawsze głębiej niż środek ciężkości rozpatrywanej ściany. Nie
dotyczy to jedynie ścian płaskich poziomych, dla których podstawienie α = 0 do wz. (5.10)
daje:
z N = zc
co stanowi potwierdzenie sformułowanego już wcześniej wniosku o tożsamości punktów
ciężkości i naporu przy rozpatrywaniu naporów na płaskie, poziome dna. Największa różnica
głębokości zanurzenia z N i z c występuje dla ściany pionowej (α = π / 2) , dla której
otrzymujemy:
i2
z N = zc + s
zc
Warto również zauważyć, że chociaż zgodnie ze wz. (5.10) głębokość zanurzenia środka
naporu jest funkcją kąta nachylenia ściany, to jak wynika ze wz. (5.9) punkt ten będzie
pozostawał w stałej odległości od środka ciężkości. Jeżeli bowiem powierzchnię będziemy
przechylać jak na rys. 5.6, tzn. jeżeli położenie środka ciężkości powierzchni F będziemy
zmieniać jak na rys. 5.5, tzn. przez obrót wokół osi y nie przechodzącej przez środek
ciężkości powierzchni F , wówczas zmieniać się będzie zarówno głębokość zanurzenia
środka ciężkości SC jak i środka naporu SN , co łatwo można sprawdzić analizując wzory
(5.9) i (5.10).
Należy jednak wprowadzić tu także bardzo ważne zastrzeżenie, iż wyprowadzone w
niniejszym rozdziale zależności są ważne tylko dla powierzchni symetrycznych względem osi
przechodzących przez środek ciężkości powierzchni F i równoległych do osi x1 , gdyż tylko w
tym przypadku punkty SC i SN będą miały identyczną współrzędną y (patrz rys. 5.5). Jeżeli
warunek ten nie jest spełniony, wówczas należy dodatkowo uwzględnić warunek zerowości
momentów względem osi x1 , a zagadnienie to znaleźć można m.in. w podręcznikach
J.Wysockiego i J.Bukowskiego.
5.3.
Napór cieczy na powierzchnie o dowolnym kształcie.
Najbardziej ogólnym przypadkiem w wyznaczaniu naporów hydrostatycznych jest
obliczanie reakcji nieruchomego płynu na sztywną ścianę o trójwymiarowej krzywiźnie,
czego przykładem może być ściana o powierzchni F pokazana na rys. 5.7. Wszystkie siły
elementarne działające na powierzchnię F tworzą przestrzenny układ sił, który można
sprowadzić do jednej wypadkowej siły:
→
→
= ρ ⋅ g ∫ n zdF
P
(5.11)
F
oraz wypadkowego momentu sił nazywanego niekiedy momentem głównym:
→
→ →
M = ρ ⋅ g ⋅ ∫ r x n zdF
F
→
(5.12)
gdzie r jest promieniem wyznaczającym położenie punktu, którego otoczeniem jest
elementarna powierzchnia dF . Rozwiązanie tego zagadnienia można również uzyskać
znacznie prościej zastępując przestrzenny układ sił trzema odpowiednio rozmieszczonymi
94
składowymi siły wypadkowej, których kierunki pokrywają się oczywiście z osiami przyjętego
układu współrzędnych.
0
x
zcy
cy
z cx
y
Fy
cx
Fx
F
z
Rys.5.7.
krzywiźnie.
Składowe poziome naporu hydrostatycznego na ścianę o trójwymiarowej
Załóżmy, że na krzywoliniowej powierzchni F pokazanej na rys. 5.7 wybierzemy
elementarną powierzchnię dF , na którą działa napór:
→
→
d N = ρ ⋅ g ⋅ z ⋅ n ⋅ dF
który na kierunki x oraz y będzie miał następujące składowe:
→
d Nx
→
d Ny
→ →
= ρ ⋅ g ⋅ z ⋅ cos n ; i dF
→
→
= ρ ⋅ g ⋅ z ⋅ cos n ; j dF
Uwzględniając, że:
→ →
= dF cos n ; i
→ →
dFy = dF cos n ; j
otrzymujemy następujące wyrażenia na składowe poziome naporu:
dN x = ρ ⋅ g ⋅ z ⋅ dFx
dN y = ρ ⋅ g ⋅ z ⋅ dFy
Całkując powyższe wyrażenia na całej powierzchni F można udowodnić, że składowa na
dany kierunek poziomy naporu na rozpatrywaną powierzchnię będzie równa naporowi na
ścianę płaską, której pole jest równe rzutowi powierzchni krzywoliniowej na płaszczyznę
prostopadłą do danego kierunku. Jeżeli zatem rzutami powierzchni krzywoliniowej o polu S
na płaszczyzny y, z oraz x, z będą figury płaskie o polach Fx i Fy (patrz rys. 5.7), wówczas
dFx
zgodnie ze wzorem (5.6) składowe poziome sił naporu będziemy mogli obliczyć następująco:
dN x = ρ ⋅ g ⋅ z cx ⋅ dFx
(5.13)
dN y = ρ ⋅ g ⋅ z cy ⋅ dFy
gdzie z cx oraz z cy oznaczają głębokości zanurzenia środków ciężkości rzutów powierzchni
Fx oraz Fy . Uwzględniając wnioski z rozdz. 5.3 można stwierdzić, że linie działania tych sił
95
przechodzić będą przez środki naporu powierzchni Fx oraz Fy , których głębokość zanurzenia
będzie można obliczyć przyjmując, że dla ścian pionowych α = π / 2 , co daje:
i2
z Nx = z cx + sx
z cx
z Ny
= z cy +
(5.14)
2
i cy
z cy
0
Sz x
y
V
C
z
Rys.5.8.
krzywiźnie.
S
Składowa pionowa naporu hydrostatycznego na ścianę o trójwymiarowej
Inna zasada obowiązywać będzie przy wyznaczaniu składowej pionowej naporu, która równa
jest ciężarowi słupa cieczy zawartego nad powierzchnią S , przy czym objętość tego słupa
cieczy zgodnie z rys. 5.8 ograniczona jest powierzchnią S , jej rzutem Sz na powierzchnię
swobodną oraz tworzącymi pionowymi przechodzącymi przez kontur ograniczający
powierzchnię S , co pozwala zapisać:
Nz = ρ ⋅ g ⋅ V
(5.15)
Ponieważ wszystkie elementarne napory pionowe dN z są do siebie równoległe, więc linia
działania składowej N z naporu przechodzi przez środek ciężkości C rozpatrywanego słupa
cieczy, jak zaznaczono na rys. 5.8.
Należy zauważyć, że pole powierzchni Fx , Fy , Fz a co z tego wynika także i wielkości
składowych naporu N x , N y , N z , nie zależą od kształtu powierzchni S lecz od konturu
obejmującego daną ścianę S i od jej położenia pod swobodną powierzchnią cieczy.
5.4.
Napór na ciała zanurzone w cieczy
Szczególnym przypadkiem naporu na powierzchnie krzywoliniowe jest reakcja
nieściśliwego płynu na powierzchnię zamkniętą, otaczającą pewną bryłę o objętości Vx
pokazaną na rys. 5.9. Podobnie jak poprzednio obieramy kartezjański układ współrzędnych ,
w którym płaszczyzna xy pokrywa się ze swobodną powierzchnią a prostopadła do niej oś z
skierowana jest pionowo w dół. Ponieważ rozpatrujemy napór na powierzchnię zakrzywioną,
→
więc działanie naporu hydrostatycznego sprowadzi się do siły wypadkowej N danej wz.
→
(5.11) oraz głównego momentu sił M opisanego wz. (5.12). Podobnie jak w przypadku
naporu na powierzchnie o dowolnym kształcie zagadnienie to można rozwiązać znacznie
96
prościej, rozpatrując poszczególne składowe naporu na kierunki przyjętego układu
współrzędnych. Dla wyznaczania składowych poziomych naporu zastosujemy zasadę
sformułowaną w rozdziale poprzednim, zgodnie z którą składowe te są równe naporowi na
powierzchnię płaską będącą rzutem powierzchni krzywoliniowej na płaszczyznę prostopadłą
do kierunku działania rozpatrywanej składowej. Jeżeli obliczać będziemy napór w kierunku
osi x , wówczas będzie on tożsamy z naporem na powierzchnię Sx zaznaczoną na rys. 5.9.
x
S
Zcx
y
C
Sx
Rys.5.9.
z
V
Napór hydrostatyczny na ciało zanurzone w płynie.
Zastosujmy metodę przekrojów (patrz rys. 1.10) przecinając bryłę V płaszczyzną równoległą
do płaszczyzny yz w taki sposób, aby przekrój bryły był identyczny z konturem Sx , co
pokazano na rys. 5.9.
a)
b)
S x1
S x2
N x2
Nx1
x
y
x
y
z
z
Rys.5.10.
Napory składowe na powierzchnię ciała zanurzonego w płynie działające w
kierunku osi x.
Otrzymamy wówczas dwie części składowe bryły V o identycznych przekrojach:
Sx1 = Sx 2 = Sx
pokazanych na rys. 5.10, których środki ciężkości rzecz jasna pokrywają się, co pozwala
zapisać:
z cx1 = z cx 2 = z cx
gdzie z cx jest głębokością zanurzenia środka ciężkości przekroju Sx . Wypadkowa naporów
pokazanych na rys. 5.10a ma składową na oś x równą :
N x1 = ρ ⋅ g ⋅ Scx1 ⋅ z cx1 = ρ ⋅ g ⋅ Scx ⋅ z cx
natomiast napór działający na bryłę z rys. 5.10b będzie równy:
N x 2 = − ρ ⋅ g ⋅ Scx1 ⋅ z cx1 = − ρ ⋅ g ⋅ Scx ⋅ z cx
co daje wypadkową naporu na kierunek x :
N x = N x1 − N x 2 = 0
Analogiczne rozumowanie można przeprowadzić dla kierunku y otrzymując ten sam wynik,
tzn.:
97
Ny = 0
co pozwala stwierdzić, że pozioma składowa naporu hydrostatycznego działająca w
dowolnym kierunku na ciało zanurzone w płynie jest równa zeru.
a)
Sz
y
x
V1
C1
S1
Nz1
z
b)
Sz
x
V2
y
Nz2
z
C2
S2
Rys.5.11.
Napory składowe działające w kierunku pionowym na powierzchnię ciała
zanurzonego w płynie.
Jedyną zatem niezerową składową naporu na powierzchnię ciała zanurzonego w
płynie jest składowa pionowa, którą obliczymy wykorzystując zasadę sformułowaną w rozdz.
5.3. Zgodnie z tą zasadą składowa pionowa naporu na powierzchnię krzywoliniową jest
równa ciężarowi cieczy zawartej nad tą powierzchnią, przy czym rozważymy tu osobno
składowe naporu na powierzchnie powstałe po przecięciu bryły o objętości V płaszczyzną
równoległą do swobodnej powierzchni i przechodzącą przez środek ciężkości bryły. Napór na
górną część powierzchni ciała równy ciężarowi bryły o objętości V1 (rys. 5.11a) jest
skierowany pionowo w dół, tzn.:
N z1 = ρ ⋅ g ⋅ V1
i przyłożony jest w środku ciężkości c1 bryły V1 . Napór na dolną część powierzchni ciała
równy ciężarowi bryły o objętości V2 skierowany jest pionowo do góry, tzn.:
N z 2 = − ρ ⋅ g ⋅ V2
i przyłożony w środku ciężkości c 2 bryły V2 , jak pokazano na rys. 5.11b. Wypadkowa siła
naporu będzie zatem równa:
N z = N z1 − N z 2 = −ρ ⋅ g ⋅ (V2 − V1 )
a ponieważ różnica objętości V2 i V1 jest równa objętości bryły V , otrzymujemy
ostatecznie:
N z = −ρ ⋅ g ⋅ V = W
(5.16)
Objętość ciała zanurzonego w płynie jest zatem równa objętości płynu wypartego przez to
ciało co pozwala stwierdzić, iż na ciało zanurzone w płynie działa siła wypadkowa naporu
98
hydrostatycznego W równa ciężarowi cieczy wypartej przez to ciało i skierowana pionowo
do góry. Siła ta nazywana jest wyporem hydrostatycznym i linia jej działania przechodzi
przez środek ciężkości bryły płynu wypartej przez zanurzone ciało, przy czym punkt ten
nazywany jest środkiem wyporu. Zależność (5.16) opisująca wypór hydrostatyczny jest znana
jako prawo Archimedesa.
5.5. Równowaga ciał pływających
→
Na ciało zanurzone w płynie oprócz siły wyporu W działa także siła ciężkości
skierowana w dół i wobec tego stan ciała określony jest przez ich wzajemną zależność, co
zapisać można:
→
→
→
= G−W
P
(5.17)
→
gdzie P jest wypadkową siłą działającą na ciało, a znaki sił ciężkości i wyporu wynikają ze
zwrotu osi z przyjętego układu współrzędnych (patrz rys. 5.10).
Jeżeli wypór ciała równy jest jego ciężarowi:
G = W
(5.18)
wówczas ciało będzie pozostawać w równowadze zanurzone na dowolnej głębokości.
Przyjmując, że gęstość płynu wynosi ρ p a gęstość zanurzonego ciała o objętości V równa
jest ρc , zal. (5.18) zapisać można:
ρ p ⋅ g ⋅ V = ρc ⋅ g ⋅ V
co daje warunek:
ρ p = ρc
(5.18a)
zgodnie z którym równowaga ciała zanurzonego całkowicie w płynie i pozostającego w
spoczynku na dowolnej głębokości możliwa jest wówczas, gdy gęstości ciała i płynu są sobie
równe.
V
Vz
Rys.5.12.
Równowaga ciała częściowo zanurzonego w płynie.
Jeżeli ciężar ciała całkowicie zanurzonego w płynie nie równoważy wyporu, tzn.:
W > G
(5.19)
która to sytuacja zachodzi, gdy:
ρ p > ρc
(5.19a)
wówczas pojawia się siła wypadkowa skierowana pionowo do góry i ciało będzie się
wynurzać do chwili, gdy w płynie zanurzona będzie jedynie objętość płynu Vz (rys. 5.12),
dająca ciężar wypartego płynu równoważący ciężar ciała:
Wz = ρp ⋅ g ⋅ Vz = ρc − g ⋅ V = G
Związek powyższy przekształcić można do postaci
ρc
Vz
(5.19b)
=
ρp
V
skąd wynika, że stosunek objętości zanurzonej ciała do całkowitej objętości będzie określony
przez iloraz gęstości pływającego ciała i płynu.
Najmniej interesującym z punktu widzenia zastosowań praktycznych jest przypadek,
gdy ciężar ciała jest większy od siły wyporu:
99
G > W
(5.20)
zachodzący wówczas, gdy:
ρc > ρ p
(5.20a)
W tym przypadku siła wypadkowa jest skierowana pionowo w dół powodując opadanie ciała
do chwili, gdy spocznie ono na dnie oddziaływując na nie z siłą P .
a)
M
W
W
a
G
G
b)
M=0
W
W
G
G
M
c)
G
G
W
W
a
Rys.5.13.
Równowaga stateczna a), obojętna b) i niestateczna c) ciała pływającego
całkowicie zanurzonego.
W przypadkach określonych zależnościami (5.18) i (5.19) równowaga ciała
pływającego wymaga spełnienia dodatkowych jeszcze warunków, aby można było mówić o
tzw. równowadze trwałej, kiedy ciało pływające nie tylko nie zmienia wysokości swego
środka ciężkości względem stałoprzestrzennego układu współrzędnych (tzn. nie wynurza się i
nie tonie), lecz także utrzymuje stałe położenie. Jeżeli ciało pływające wytrącone ze stanu
równowagi pod wpływem sił zewnętrznych powraca do stanu początkowego z chwilą gdy siły
100
zewnętrzne przestają działać, wówczas mówimy o równowadze statecznej a ciało takie (np.
statek) nazywamy statecznym. Rozpatrzmy najpierw przypadek ciała pływającego całkowicie
zanurzonego, którego równowaga zapisana wz. (5.18) i (5.18a) może obejmować trzy różne
→
→
stany pokazane na rys. 5.13. Ponieważ siły ciężkości G i wyporu W działają w kierunku
pionowym, stąd też pozostawać będą one w równowadze, jeżeli spełniony będzie warunek,
aby środek ciężkości i środek wyporu leżały na osi pionowej zwanej osią pływania, która
musi pokrywać się z osią pionową pływającego ciała.
M
a)
W
W
a
G
G
M=0
b)
W
G
W
G
M
c)
G
W
W
G
a
Rys.5.14.
Równowaga stateczna a), obojętna b) i niestateczna c) ciała pływającego
częściowo zanurzonego.
Spełnienie tego warunku zależy od wzajemnego położenia środków ciężkości i
wyporu na osi pływania, przy czym dla uzyskania równowagi statecznej koniecznym jest, aby
środek wyporu położony był wyżej niż środek ciężkości, co przedstawiono na rys. 5.13a. W
tym przypadku występowanie zakłócenia równowagi i odchylenie osi symetrii ciała od osi
pływania spowoduje, że siły wyporu i ciężkości stworzą parę sił dającą moment M nazywany
momentem prostującym. Moment ten będzie dążył do przywrócenia stanu równowagi i stan
taki nazywany jest równowagą stateczną, a ciało pływające jest stateczne.
Jeżeli środki ciężkości i wyporu pokrywają się, wówczas wytrącenie ciała ze stanu
równowagi nie spowoduje wystąpienia jakiejkolwiek reakcji i pływające ciało nie będzie
101
wykazywać tendencji powrotu do stanu równowagi początkowej Taki stan ciała pływającego
nazywany jest równowagą obojętną a taki typ ciała pływającego pokazany na rys. 5.13b
zaliczany jest w okrętownictwie do grupy obiektów niestatecznych.
Gdy środek ciężkości znajduje się na osi pływania wyżej niż środek wyporu (rys.
5.13c), wówczas wytrącenie ciała ze stanu równowagi powoduje powstanie momentu sił
działającego zgodnie z kierunkiem wychylenia. Moment ten zwany przechylającym powoduje
dalsze wychylenie ciała i uniemożliwia powrót do stanu początkowego a stan taki nazywany
jest równowagą niestateczną a ciało pływające jest obiektem niestatecznym.
W identyczny sposób wyrazić możemy warunki stateczności dla ciał pływających na
powierzchni w stanie częściowo wynurzonym, którego warunki równowagi między siłami
wyporu i ciężkości dane są zw. (5.19) i (5.19b). Jak pokazano na rys. 5.14a jeżeli środek
wyporu położony jest na osi pływania wyżej niż środek ciężkości, wówczas wychylenie ciała
z położenia równowagi powoduje powstanie momentu prostującego, który dąży do
przywrócenia pierwotnego położenia ciała. Taki stan jest zatem równowagą stateczną a ciało
pokazane na rys. 5.14a zaliczyć można do grupy statecznych.
a)
b)
c)
ϕ
−ϕkr ϕkr
W
W
G
G
G
W
d)
−ϕkr ϕkr
Rys.5.15.
obszar stateczności
Krytyczny kąt wychylenia ciała pływającego częściowo wynurzonego
Jeżeli środek ciężkości pokrywa się ze środkiem wyporu (rys.5.14b) mamy do czynienia z
równowagą obojętną gdyż nie pojawia się wówczas moment prostujący i takie ciało
pływające pozostaje w równowadze w każdym położeniu.
Położenie środka ciężkości nad środkiem wyporu (rys. 5.14c) przy każdym odchyleniu od
stanu chwilowej równowagi powoduje powstanie momentu powodującego dalsze pochylenie
ciała co oznacza, że jest to równowaga niestateczna.
W zastosowaniach praktycznych zarówno ciało z rys. 5.14b jak i z rys. 5.14c zaliczane są do
ciał (statków) niestatecznych.
Podsumowując dotychczasowe wnioski stwierdzić można, iż równowaga stateczna
ciał pływających wymaga spełnienia trzech warunków:
po pierwsze ciężar ciała musi być zrównoważony siłą wyporu,
102
-
po drugie punkty przyłożenia obydwu tych sił muszą leżeć na osi pływania
pokrywającej się z osią pionową ciała,
po trzecie punkt przyłożenia siły wyporu musi leżeć wyżej niż środek ciężkości ciała.
Należy jednak zwrócić uwagę, że w przypadku ciał pływających częściowo zanurzonych
spełnienie powyższych warunków (co pokazano na rys. 5.15a) daje równowagę stateczną
jedynie przy takich kątach wychylenia ϕ , przy których para sił W oraz G daje moment
prostujący (patrz rys. 5.15b). Zwiększenie kąta wychylenia powoduje jednak wędrówkę
środka wyporu, który po przekroczeniu krytycznej wartości ϕkr może przemieścić się w taki
sposób, że zamiast momentu prostującego otrzymamy moment pochylający. Zakres kątów
wychylenia:
± ϕkr
określać będzie wówczas tzw. obszar stateczności, w którym występować będzie moment
prostujący, natomiast poza tymi obszarem występować będzie moment pochylający, który
pogłębiać będzie wychylenie.
W trakcie wychylania ciała pływającego częściowo wynurzonego środek ciężkości C
obiektu pływającego nie zmienia swego położenia, natomiast linia działania siły wyporu
przesuwa się w stronę części bardziej zanurzonej, co wynika ze zmiany kształtu objętości
zanurzonej ciała (patrz rys. 5.16). Linia działania siły wyporu przecina wówczas oś pływania
w punkcie M, który nazywamy metacentrum, natomiast odległość od środka ciężkości do
metacentrum mierzona wzdłuż osi pływania i oznaczona na rys. 5.16 jako odcinek m
nazywana jest wysokością metacentryczną. Jeżeli wysokość metacentryczna:
m > 0
co oznacza, że metacentrum położone jest na osi pływania powyżej środka ciężkości,
wówczas ciało pływające znajduje się w równowadze statecznej.
M
m
W
C
G
Rys.5.16.
Metacentrum i wysokość metacentryczna.
W praktyce, dla większości statków wysokość metacentryczna utrzymywana jest w zakresie:
m = 0.15 ÷ 1.3 [m]
zależnie od masy i kształtu kadłuba. Można udowodnić, że okres swobodnych oscylacji
(wahań) statku T związany jest z wysokością metacentryczną następującym związkiem
proporcjonalności:
1
T ~ (m ) 2
co oznacza, że dla większych m otrzymujemy skrócenie okresu oscylacji natomiast małe
wartości m prowadzą do dłuższych okresów, tzn. powolniejszych oscylacji. Doświadczenie
wykazuje, że zwiększenie wysokości metacentrycznej ponad wartości podane powyżej
powoduje, że statek powraca gwałtownie do położenia równowagi, co powoduje powstanie
dużych sił bezwładności mogących uszkodzić statek lub ładunek. Zbyt małe natomiast
wartości m dają co prawda łagodne (powolne) wahania statku, lecz zmniejszają margines
bezpieczeństwa stateczności, gdyż małe błędy w rozmieszczeniu ładunku mogą zmienić na
−
103
tyle położenie środka ciężkości, że statek może znaleźć się w niedopuszczalnym stanie
równowagi obojętnej lub niestatecznej. W okrętownictwie kryteria stateczności oparte są
zatem na wysokości metacentrycznej, jednak temat ten nie będzie w ramach niniejszego
wykładu szerzej rozwijany a zainteresowany Czytelnik znajdzie więcej informacji m.in. w
książkach J.Wysockiego i J.Bukowskiego.
104