MECHANIK NR 7/2016
657
Projekt wstępny układu wykonawczego napędu
sterolotek dla pocisku rakietowego kalibru 72 mm
Preliminary design of the actuators of control surfaces
the missile of calibre 72 mm
MARCIN CHODNICKI
MARCIN CZYŻAK
BOGDAN MACHOWSKI
JANUSZ ROSIAK ADRIAN SZKLARSKI *
Materiały z XX SKWPWiE, Jurata 2016 r.
DOI: 10.17814/mechanik.2016.7.116
Przyjęto założenie, że każdy ster może być napędzany oddzielnym
i niezależnym aktuatorem, natomiast praca cyfrowego kontrolera
pozwala realizować odpowiednim sterom funkcje sterów lub lotek
(ogólnie – sterolotek). Rozwiązanie z pozoru wymagające większego
skomplikowania układu elektronicznego powala wykonać jednak mechanizm sterowy, powtarzalny i realizowalny technicznie. Rozwiązanie
tego typu wykorzystano w modelu pocisku kalibru 72 mm.
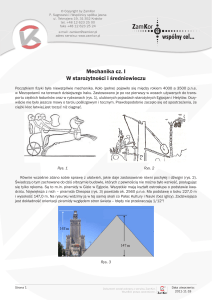
Rys. 1.
Układy:
a) osiowo-symetryczny;
SŁOWA KLUCZOWE: aktuator, pilot automatyczny
Rys.
1. Układy:
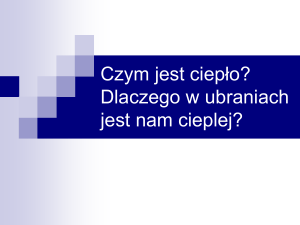
a) osiowo-syme- Rys. 2. Możliwe kierunki siły nośnej zależne
Rys. 2.od
Możliwe
kierunki
b) płasko-symetryczny [4]
wychylenia
sterówsiły
[4] nośnej
tryczny; b) płasko-symetryczny
zależne od wychylenia sterów [4]
It is assumed that each rudder can be driven by a separate and inde[4]
Wypadkowa siła nośna działać będzie w płaszczyźnie odchylonej zarówno od płaszczyzny
pendent actuator and the work of the digital controller can implement
poziomej jak i pionowej, przy czym kierunek jej działania podają schematycznie rysunki
z prawej strony
góry. Każda
para sterów
posiada dwa
możliwe
położenia sterowane
jednym
the appropriate functions rudders and ailerons (general – elevons).
przy uczym
kierunek
jej działania
podają
schematycznie
rysunki
kanałem. z prawej
Przy dwóch
parach
sterówKażda
sterowanych
dwukanałowym
systemem
istnieje
The solution apparently requires greater complexity of the electronics
strony
u góry.
para sterów
posiada
dwa możlimożliwość orientowania wypadkowej siły we wszystkich czterech ćwiartkach, a więc uzyskać
knocks do, however, steering mechanism, repetitive and realizable.
we
położenia
sterowane
jednym
kanałem.
Przy
dwóch
parach
można dowolny kierunek działania siły nośnej, zapewniający przestrzenne sterowanie
This solution was used in the model of the missile of caliber 72 mm.
sterowanych
dwukanałowym
istnieje
możpociskiemsterów
rakietowym.
Sygnały poszczególnych
kanałów sąsystemem
proporcjonalne
do wymaganego
manewru. liwość
Układ sterowania
może wypadkowej
dopuszczać ograniczony
obrót pocisku czterech
dookoła osi
KEYWORDS: actuator, autopilot
orientowania
siły we wszystkich
podłużnej ćwiartkach,
lub może wymagać
zachowania
stałego położenia
powierzchni
nośnych
zgodnie
można
więc uzyskać
dowolny
kierunek
działania
z ich położeniem początkowym na wyrzutni. Zarówno w jednym, jak i w drugim przypadku
Ogólne rozważania dotyczące sposobu rozmieszczania
siły nośnej, zapewniający przestrzenne sterowanie pociskiem
konieczny jest jeszcze jeden element sterowania, mianowicie autopilot stanowiący
powierzchni nośnych i sterowych pocisku rakietowego dają
rakietowym.
Sygnały
poszczególnych
są na
proporcjoautonomiczny
układ na pokładzie
pocisku.
Zadanie takiego kanałów
układu polega
rozdzieleniu
sygnałów nalne
na odpowiednie
pary sterów, zależnie
od ich Układ
chwilowego
położenia względem
w efekcie dwa rodzaje układów konstrukcji płatowców pocido wymaganego
manewru.
sterowania
może
układu nieruchomego
w pociskach
wykonujących
względem
osi podłużnej,
względnie
sków, a mianowicie (rys. 1):
dopuszczać
ograniczony
obrót obrót
pocisku
dookoła
osi podłużnej
na utrzymaniu położenia poszczególnych par sterów zgodnie z ich początkowym położeniem
●● osiowo-symetryczny;
lub może wymagać zachowania stałego położenia powierzchni
na wyrzutni. W tym drugim przypadku autopilot napędza specjalnie do tego celu
●● płasko-symetryczny.
nośnych
z ich
położeniem
początkowym
na wyrzutni.
przewidziane
lotki, zgodnie
które mogą
stanowić
oddzielny
układ powierzchni
sterujących
przechyleniem pocisku lub można wykorzystać do tego celu jedną parę sterów. Napęd takiej
W artykule rozważania ograniczone zostały do konstrukcji
pary sterów
zaopatrzony
jest w dodatkowy mechanizm różnicowego ich wychylenia.
Stery
aerodynamiczne
osiowo-symetrycznej. Układ osiowo-symetryczny stosowany
jest do pocisków rakietowych, od których wymaga się znacznej
Stery aerodynamiczne
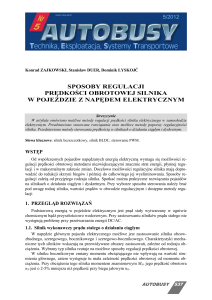
Prosty układ napędowy steru przedstawia rys. 3. Stery rozzdolności manewrowania w przestrzeni. Najważniejszą zaletą
mieszczone
symetrycznie
po3.obu
kadłuba
połączone
Prosty układ
napędowy steru
przedstawia rys.
Sterystronach
rozmieszczone
symetrycznie
po obu
układów osiowo-symetrycznych jest możliwość sterowania
stronach kadłuba,
są rurą ułożyskowaną
w dwóch punktach.
Gniazda
łożysk
są rurąpołączone
ułożyskowaną
w dwóch punktach.
Gniazda
łożysk
przestrzennego za pomocą dwóch sygnałów zmieniających
zamocowane
są do kadłuba.sąDodorury,
łączącej Do
oba rury,
stery na
sztywno,oba
zamocowana
jest
zamocowane
kadłuba.
łączącej
stery na
kąt wznoszenia i kąt kierunku lotu, zwanych często kątami dźwigienka
elenapędzana bezpośrednio przez, w tym przypadku, siłownik. Układ taki pozwala
sztywno,
zamocowana
jest
dźwigienka
napędzana
bezpośredwacji i azymutu. Sposób takiego sterowania można najlepiej
na wychylenie obu sterów w jednakowym kierunku i o jednakowy kąt. W układach osiowonio przez,
w tym
siłownik.
Układ taki
pozwala
symetrycznych
co najmniej
jednaprzypadku,
para sterów posiada
tak rozwiązany
napęd.
Jeśli obiena
pary
wyjaśnić na odpowiednich schematach, które przedstawiono
sterów mają
taki prosty obu
układ sterów
napędu steru,
wówczas pocisk
ma jeszcze
lotki wychylane
wychylenie
w jednakowym
kierunku
i o jednakowy
na rys. 2. Widoczne na tych schematach krawędzie sterów,
różnicowo. W większości przypadków jedna para sterów spełnia rolę równocześnie sterów
kąt. W układach osiowo-symetrycznych co najmniej jedna para
poza głównymi płaszczyznami nośnymi, reprezentują położei lotek.
sterów
posiada
rozwiązany
napęd.
Jeśli obie
pary sterów
nie krawędzi spływu steru.
Napęd takich
sterów
musi tak
zapewniać
możliwość
wychylenia
równoczesnego
sterów
taki
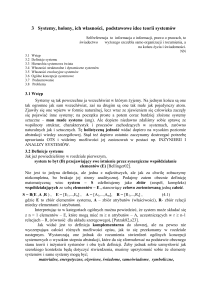
prosty Kinematyczny
układ napędu
steru,
wówczas
ma
w jednym mają
kierunku
i różnicowo.
schemat
różnicowego
napędupocisk
sterów podany
Równoczesne wychylenie sterów poziomych i pionowych
jest na rys.jeszcze
4. Para sterów
różnicowo
1-3, których
osie obrotów oznaczono
b-b, ma
lotkinapędzana
wychylane
różnicowo.
W większości
przypadków
pociąga za sobą zwiększenie lub zmniejszenie kąta natarcia
łożyskowanie niezależne dla każdego steru. Jednoczesne wychylenie sterów 1-3 realizuje
jedna para sterów spełnia rolę równocześnie sterów i lotek.
zależnie od kierunku wychylenia sterów poziomych, z równosiłownik (6) za pomocą dźwigienki i strzemienia (9). Różnicowe wychylenie sterów realizuje
musi zapewniać
możliwość
wychyleczesnym odchyleniem pocisku w lewo lub w prawo, zależnie
siłownik (7) Napęd
za pomocątakich
dźwignisterów
(10). Niezależność
obu ruchów
zapewnia specjalny
węzeł
nia równoczesnego
w jednym
i różnicowo.
(8). Para sterów
2-4 wychylana jest sterów
równocześnie
w jednym kierunku
kierunku, ponieważ
oba stery
od kierunku wychylenia sterów pionowych. Wychylenie sterów
Kinematyczny schemat różnicowego napędu sterów podany
poziomych daje w efekcie pojawienie się składowej pionowej
jest na rys. 4. Para sterów 336
napędzana różnicowo 1÷3, których
siły nośnej, natomiast wychylenie sterów pionowych – skłaosie obrotów oznaczono b-b, ma łożyskowanie niezależne dla
dowej poziomej.
każdego steru. Jednoczesne wychylenie sterów 1÷3 realizuje
Wypadkowa siła nośna działać będzie w płaszczyźnie odsiłownik (6) za pomocą dźwigienki i strzemienia (9). Różnicochylonej zarówno od płaszczyzny poziomej, jak i pionowej,
we wychylenie sterów realizuje siłownik (7) za pomocą dźwigni
* Mgr inż. Marcin Chodnicki – Instytut Techniczny Wojsk Lotniczych; mgr
(10). Niezależność obu ruchów zapewnia specjalny węzeł
inż. Marcin Czyżak – Ministerstwo Obrony Narodowej; dr inż. Bogdan
(8). Para sterów 2÷4 wychylana jest równocześnie w jednym
Machowski ([email protected]) – Wojskowa Akademia Techkierunku, ponieważ oba stery połączone są strzemieniem
niczna, Wydział Mechatroniki i Lotnictwa; mgr inż. Janusz Rosiak (janusz.
na sztywno. Wychylenie sterów realizuje siłownik (5). Innym
[email protected]) – PCO S.A.; mgr inż. Adrian Szklarski (szklarskia@
rozwiązaniem jest przyjęcie założenia, że każdy ster może
witu.mil.pl) – Wojskowy Instytut Techniczny Uzbrojenia
są strzemieniem na sztywno. Wychylenie sterów realizuje
siłownik (5). Innym b)
a)
em jest przyjęcie założenia, że każdy ster może być napędzany oddzielnym
Rys. 7. Silnik BLDC, a) widok, b) rzut boczny [7]
ym aktuatorem, natomiast praca kontrolera pozwala realizować odpowiednim
MECHANIK NR 7/2016
1. Parametry
silnika BLDC[8] b)
kcje sterów658lub lotek (ogólnie – sterolotek). Rozwiązaniea) z Tabela
pozoru
wymagające
Parametr
Wartość [jednostka]
skomplikowania układu elektromechanicznego pozwala wykonać
jednak
Rys.prosty
7. Silnik BLDC, a) widok, b) rzut boczny [7]
Napięcie zasilania
24 [V]
być
napędzany
oddzielnym
i
niezależnym
aktuatorem,
na■
Przekładnia
–typu
w modelu została wykorzystana
plastikowa
sterowy, powtarzalny i realizowalny technicznie. Rozwiązanie
tego
Prąd
znamionowy/rozruchowy
0,62/1,5 [A]
Tabela 1. Parametry
silnika
BLDC[8]
tomiastnapraca
kontrolera
pozwala
realizować
przekładnia
kątowa,
o
przełożeniu
1:120
ne są strzemieniem
sztywno.
Wychylenie
sterów
realizuje odpowiednim
siłownik (5). Innym
Moment rozruchowy
0,022(rys.
[Nm]8). Ze wzglądu
no w modelu
pocisku
kalibru
72
naRozrys. 5.naObroty
Parametr
Wartość
[jednostka] przesterom
funkcje
sterów
lub mm
lotek
(ogólnie
– sterolotek).
demonstracyjny
charakter
plastikowej
aniem
jest przyjęcie
założenia,
że każdy
sterprzedstawionego
może być
napędzany
oddzielnym
znamionowe/ bez
obciążeniaprojektu użycie
3500/6250
[obr/min]
Napięcie
zasilania
24 pocisku
[V]
wiązanie
z pozoru
wymagające
skomplikowania
kładni
jest
wystarczające,
w rzeczywistym
rakietowym
Masa
silnika
0,12
[kg]
eżnym aktuatorem,
natomiast
praca
kontrolera większego
pozwala realizować
odpowiednim
Prąd
znamionowy/rozruchowy
0,62/1,5
[A]
elektromechanicznego
pozwala
wykonaćzjednak
należy
wykorzystać
przekładnię metalową.
Wykorzystany
mounkcje sterówukładu
lub lotek
(ogólnie – sterolotek).
Rozwiązanie
pozoruprosty
wymagające
rozruchowy
0,022
[Nm] kątowa, o przełoc) przekładnia
–Moment
w modelu
została wykorzystana
plastikowa
przekładnia
mechanizm
sterowy,
powtarzalny
realizowalny
technicznie.
del przekładni
posiada
wbudowane
sprzęgło
zabezpieczające
go skomplikowania
układu
elektromechanicznego
pozwala
prosty
połączone
są strzemieniem
na sztywno.
Wychyleniei sterów
realizujewykonać
siłownik
(5).jednak
Innymżeniu
Obroty znamionowe/
obciążenia
3500/6250
1:120 (rys.8).
Ze wzglądu nabez
demonstracyjny
charakter
projektu[obr/min]
użycie plastikowej
jest przyjęcie
założenia,
że każdy
ster może
być Rozwiązanie
napędzany
oddzielnym
Rozwiązanie
tego
typu
wykorzystano
w modelu
pocisku
kaliprzekładnię
przed uszkodzeniem plastikowych
zm sterowy,rozwiązaniem
powtarzalny
i realizowalny
technicznie.
tego typu
Masa silnika
0,12 [kg] zębów.
i niezależnym aktuatorem, natomiast praca kontrolera pozwala realizować odpowiednimprzekładni jest wystarczające, w rzeczywistym pocisku rakietowym należy wykorzystać
brupocisku
72
mmkalibru
przedstawionego
na rys. 5. na rys.
ystano w modelu
72 mm
przedstawionego
5. wymagająceprzekładnię metalową. Wykorzystany model przekładni posiada wbudowane sprzęgło
sterom
funkcje sterów
lub lotek
(ogólnie
– sterolotek). Rozwiązanie
z pozoru
przekładnia
– w modelu przed
została
wykorzystana
plastikowa przekładnia
kątowa, o przełozabezpieczając
przekładnię
uszkodzeniem
zębów.
większego skomplikowania układu elektromechanicznego pozwala wykonać jednak prostyc)
a)
b) plastikowych
mechanizm sterowy, powtarzalny i realizowalny technicznie. Rozwiązanie tego typu
wykorzystano w modelu pocisku kalibru 72 mm przedstawionego na rys. 5.
Prosty układ Rys.
napędu
sterów [4]
3. Prosty układ napędu sterów [4]
żeniu 1:120 (rys.8). Ze wzglądu na demonstracyjny charakter projektu użycie plastikowej
przekładni jest wystarczające, w rzeczywistym pocisku rakietowym należy wykorzystać
przekładnię metalową. Wykorzystany model przekładni posiada wbudowane sprzęgło
zabezpieczając przekładnię przed uszkodzeniem plastikowych zębów.
Rys. 8.różnicowego
Przekładnia: a) widok, b) wymiary przekładni kątowej [8]
Rys. 4. Kinematyczny schemat
Rys. 3. Przekładnia: a) widok, b) wymiary przekładni kątowej [8]
napędu sterów
[4]
a)
b)
Rys. 4. Kinematyczny schemat różnicowego
napędu sterów [4]
■ Ster aerodynamiczny
– model na
steru
został
wykonany
na
3. Prosty układ
napędu
sterów
[4]napędu Rys.
Kinematyczny
schemat
różnicowego
d)różster aerodynamiczny
– model steru został wykonany
podstawie
danych
demonstratora
Rys.
3. Prosty
układ
ste- 4.Rys.
4. Kinematyczny
schemat
pocisku
rakietowego
kalibru
72demonstratora
mma)(rys.
9): b) wymiary
podstawie
danych
pocisku
rakietowego
rów [4]
nicowego
napędu
sterów[4]
[4]
napędu
sterów
Rys. 3.
Przekładnia:
widok,
przekładni
kątowej [8]kalibru
72 mm (rys. 9).
d) ster aerodynamiczny – model steru został wykonany na podstawie danych demonstratora
pocisku rakietowego kalibru 72 mm (rys. 9):
a)
b)
Rys. 5. Model pocisku kalibru 72 mm [1, 2]
Elementy składowe napędu sterów
b)
a)
Elementami składowymi napędu elektrycznego sterów będą: silnik BLDC, przekładnia, ster,
stopień mocy, sterownik elektroniczny. Podstawowe wymagania:
− średnica wewnętrzna kadłuba: ≤ 62 mm,
Rys.
5. Model
pocisku
722]mm [1, 2]
−Rys.
długość
przedziału
sterowania:
255 kalibru
mm,
5. Model
pocisku
kalibru
72 mm [1,
− minimalny moment obrotowy: 1 Nm,
− maksymalny czas wykonania obrotu o 24° (skrajne wychylenia steru): ≤ 0,3 s.
Rys. 5. Model pocisku kalibru 72 mm [1, 2]
ty składowe napędu
sterów
Elementy
składowe napędu sterów
Rys. 9. Ster aerodynamiczny: a) model steru 3D, b) wymiary steru
Rys. 9. Ster aerodynamiczny: a)338
model steru 3D, b) wymiary steru
Rys. 9. Ster aerodynamiczny: a) model steru 3D, b) wymiary steru
a) przedział sterowania (rys. 6):
■■Stopień mocy – w pracy
338został wykorzystany układ pokładowe
napędu
sterów
a)
trójnego
półmostka
typu
H
z tranzystorami typu MOSFET
ami
składowymi
napędu
elektrycznego
sterów
będą:
silnik
BLDC,
przekładnia,
ster,
Elementami składowymi napędu elektrycznego
sterów
b)
(rys. 10). W celu zaoszczędzenia możliwie jak najwięcej miejmocy, sterownik
elektroniczny.
Podstawowe
wymagania:
będą:
silnik BLDC,
przekładnia,
ster, stopień mocy, sterownik
sca został użyty układ
firmy STMicroeletronics L6234
nica
wewnętrzna
kadłuba:
mm,
elektroniczny.
Podstawowe
wymagania:
i składowymi
napędu≤ 62
elektrycznego
sterów będą: silnik BLDC,
ster,scalony
e) stopieńprzekładnia,
mocy – w pracy został
wykorzystany układ potrójnego półmostka typu H
w obudowie
Power
DIP
20.
ość
przedziału
sterowania:
255
mm,
●
●
średnica
wewnętrzna
kadłuba:
≤62
mm,
z wykorzystaniem tranzystorów typu MOSFET (rys. 10). W celu zaoszczędzenia
cy, sterownik elektroniczny. Podstawowe wymagania:
możliwie jak najwięcej miejsca został użyty układ scalony firmy STMicroeletronics
●●obrotowy:
długość przedziału
sterowania: 255 mm,
malny moment
1 Nm,
L6234
asymalny
wewnętrzna
kadłuba:
≤o62
mm,
a) w obudowie Power DIP 20.
b)
●● minimalny
moment
obrotowy:
1 Nm,
czas wykonania
obrotu
24°
(skrajne
wychylenia
steru):
≤
0,3
s.
Rys. 6. Przedział sterowania: a) model, b) wymiary przedziału sterowania
●
●
maksymalny
czas
wykonania
obrotu
o
24°
(skrajne
wychyprzedziału sterowania: 255 mm,
lenia
steru):
edział sterowania
(rys.
6): ≤0,3 s.
337
lny moment obrotowy: 1 Nm,
a) ■ Przedziałobrotu
sterowania
(rys.
6).
malny czas wykonania
o 24°
(skrajne
wychylenia
steru): ≤ 0,3 s.
b)
a)
b)
ał sterowania (rys. 6):
a)
b)
Rys. 6. Przedział sterowania: a) model, b) wymiary przedziału sterowania
Rys. 6. Przedział
sterowania:
model,
b) wymiary
przedziału
sterowania
■ Silnik
BLDC –a)ze
względu
na wymagania
stawiane
napędowi sterów zostanie wykorzystany silnik BLDC DB22L01
Rys. 10. Stopień mocy a) widok, b) schemat układu scalonego L6234 [9]
Rys. 40. Stopień mocy a) widok, schemat układu scalonego L6234[9]
TABLICA II. Parametry układu L6234 [9]
Tabela 2. Parametry układu L6234[9]
Parametr
Wartość
Parametr
Wartość
Napięcie zasilana
Napięcie zasilana
7 –7÷52
52 [V]V
2,82,8
A A
Prąd wyjściowyPrąd wyjściowy
firmy
Nanotec
7).337
b) silnik
BLDC
– ze (rys.
względu
na stawiane wymagania napędowi sterów zostanie
wykorzystany
silnik BLDC DB22L01 firmy Nanotec
a)
b) (rys. 7):
f) sterownik silnika BLDC – na potrzeby projektu został wykonany sterownik trójfazowego
silnika ■BLDC.
Wykorzystano
sterowania.projektu
Właściwezostał
podanie
■Sterownik
silnikatrapezową
BLDC –metodę
na potrzeby
impulsów sterujących na stopień mocy wymaga określenie położenia wału, a co zatem
wykonany
sterownik
trójfazowego
silnika
BLDC.
Wykorzystano
idzie odpowiedniej komutacji. W tym celu zastosowaniu pomiar siły elektromotorycznej
trapezową
metodę
sterowania.
SEM.
Jest to siła wyrażona
różnicą
potencjałówWłaściwe
na zaciskach podanie
źródła prąduimpulsów
w czasie, gdy
obwód
jest otwarty. na
W przypadku
SEM powstaje
w czasiepołożenia
oddziaływania
sterujących
stopień silników
mocy siła
wymaga
określenia
a)
polawału,
magnetycznego
uzwojenia
podczas obrotukomutacji.
wirnika.
a co zanatym
idziesilnika
– odpowiedniej
W tym celu
Rys. 6. Przedział sterowania: a) model, b) wymiary przedziału sterowania
Rys. 7. Silnik BLDC, a) widok, b) rzut boczny [7]
Rys. 7. Silnik BLDC, a) widok, b) rzut boczny [7]
337
TABLICA I. Parametry silnika BLDC [8]
Tabela 1. Parametry silnika BLDC[8]
Parametr
Parametr
Napięcie
zasilania
Napięcie
zasilania
znamionowy/rozruchowy
Prąd Prąd
znamionowy/rozruchowy
Moment rozruchowy
Moment rozruchowy
Obroty znamionowe/ bez obciążenia
Obroty
znamionowe/
bez obciążenia
Masa
silnika
Masa silnika
Wartość
Wartość [jednostka]
24[V]
V
24
0,62/1,5
[A]
0,62/1,5
A
0,022 [Nm]
0,022 Nm
3500/6250 [obr/min]
3500/6250
obr/min
0,12
[kg]
0,12 kg
zastosowano pomiar siły elektromotorycznej SEM. Jest to
siła wyrażona różnicą potencjałów na zaciskach źródła prądu
w czasie, gdy obwód jest otwarty. W przypadku silników siła
SEM powstaje w czasie oddziaływania pola magnetycznego
na uzwojenia silnika podczas obrotu wirnika.
Omawiany sposób sterowania silnikiem BLDC nazywa się
trapezoidalnym ze względu na kształt przebiegu siły SEM na
poszczególnych fazach silnika. Na podstawie podanego wykresu można zauważyć pewien algorytm sterowania silnikiem
c) przekładnia – w modelu została wykorzystana plastikowa przekładnia kątowa, o przełożeniu 1:120 (rys.8). Ze wzglądu na demonstracyjny charakter projektu użycie plastikowej
przekładni jest wystarczające, w rzeczywistym pocisku rakietowym należy wykorzystać
przekładnię metalową. Wykorzystany model przekładni posiada wbudowane sprzęgło
zabezpieczając przekładnię przed uszkodzeniem plastikowych zębów.
Rys. 51. Wzorcowy idealny kształt siły SEM
oraz prądu [6]
Rys. 62. Widok STM Discovery F4
f)
Prąd wyjściowy
2,8 A
sterownik silnika BLDC – na potrzeby projektu został wykonany sterownik trójfazowego
Wykorzystano
metodę
sterowania.
f) silnika
sterownikBLDC.
silnika BLDC
– na potrzebytrapezową
projektu został
wykonany
sterownik Właściwe
trójfazowegopodanie
impulsów
sterujących
na stopień
mocy wymaga
a co zatem
silnika BLDC.
Wykorzystano
trapezową
metodę określenie
sterowania.położenia
Właściwewału,
podanie
impulsów
sterującychkomutacji.
na stopień W
mocy
określenie położenia
wału,elektromotorycznej
a co zatem
idzie
odpowiedniej
tymwymaga
celu zastosowaniu
pomiar siły
idzie odpowiedniej
komutacji. różnicą
W tym celu
zastosowaniu
pomiar siłyźródła
elektromotorycznej
SEM.
JestNR
to siła
wyrażona
potencjałów
na zaciskach
prądu w czasie, gdy
MECHANIK
7/2016
SEM. Jest
siła wyrażona
różnicą potencjałów
źródła prądu
w czasie,
gdy
obwód
jesttootwarty.
W przypadku
silników na
siłazaciskach
SEM powstaje
w czasie
oddziaływania
obwód
jest otwarty. Wnaprzypadku
silników
SEM obrotu
powstaje
w czasie oddziaływania
pola
magnetycznego
uzwojenia
silnikasiła
podczas
wirnika.
pola magnetycznego na uzwojenia silnika podczas obrotu wirnika.
659
●● napięcie zasilające silnik: 24 V,
●● maksymalny prąd silnika: 1,5 A,
●● elementy wykonawcze i mikrokontroler na wspólnej masie,
●● napięcie sygnałów sterujących z mikrokontrolera: 3,3 V,
●● maksymalny prąd sygnałów sterujących: 20 mA,
d) napięcie sygnałów
sterujących
z mikrokontrolera:
3,3V, sygnałów
●● sterownik
musi posiadać
możliwość przenoszenia
PWMsygnałów
do 50 kHz. sterujących: 20mA,
e) maksymalny prąd
noty
aplikacyjnej
układu L6234sygnałów
wszystkie tranzyf) sterownik musi Według
posiadać
możliwość
przenoszenia
PWM do 50 kHz
story można sterować przy napięciu zasilania dla stanu wysokiego
2÷7 V. L6234
Zatem wykorzystany
układ mikroprocesorowy
Według noty aplikacyjnej
układu
wszystkie tranzystory
można sterować przy
spełnia
wymagania.
Przy
zasilaniu
3,3
V
tranzystory
pozwalają
zasilania dla stanu wysokiego od 2V do 7V. Zatem wykorzystany
układ mikropro
Rys. 51. Wzorcowy idealny kształt siły SEM
na uzyskanie prądu drenu ponad 1,5 A, umożliwiając steroRys. 62. Widok STM Discovery F4
Rys.
51.11.
Wzorcowy
idealny
kształtkształt
siły SEM Rys. 12. Widok
oraz prądu
[6]
spełnia
wymagania.
Przy
zasilaniu
3,3V
tranzystory
pozwalają
na
prą
Rys.
Wzorcowy
idealny
STM
Discovery
F4
Rys. 62. Widok STM Discovery F4 wanie kluczami tranzystorowymi, co jest wystarczające uzyskanie
dla
oraz
prądu[6]
[6]
siły SEM oraz
prądu
ponad 1,5A umożliwiając
sterowanie
kluczami
tranzystorowymi,
co
jest
wystarcz
wybranego silnika BLDC.
Podsumowując tak dobrane elementy układu sterowania
wybranego silnika BLDC.
339
silnikiem
BLDC pozwalają
na sterowania
jego bezpieczną
i ciągłą pracę.
BLDC podzielony na sześć części.
Pomiar
sygnału
SEM
dokoPodsumowując tak dobrane elementy
układu
silnikiem
BLDC pozwalaj
339
Oscylogram komutacji silnika BLDC oraz momentu przełączenuje się na fazie, która nie jest aktualniebezpieczną
zasilana. Następnie
i ciągłą pracę. Oscylogram komutacji silnika BLDC oraz momentu prz
nia na kolejną komutację na podstawie sygnału SEM i sumy
porównuje się mierzony sygnał z jednej fazy z sumą sygnałów
na kolejną
komutacjesygnałów
na podstawie
sygnału
przedstawia
rys. SEM
13. i sumy sygnałów przedstawia rys. 1
trzech faz. W momencie przecięcia się następuje
przełączenie
na kolejną komutację.
W projekcie wykorzystano układ firmy STMicroelectronic
STM32F4. Układ ten bazuje na procesorze ARM Cortex M4
o częstotliwości pracy 168 MHz i 1 MB pamięci Flash.
Opis działania napędu sterów
Napęd steru pod względem konstrukcji najczęściej stanowi
jeden zespół, który jest umieszczony w oddzielnym przedziale
kadłuba pocisku plot. Można spotkać rozwiązania, w których
źródła energii są oddzielnymi zespołami. Z zasady źródło
energii, które zasila napęd steru, jest głównym źródłem energii
zasilającym pokładowe urządzenia pocisku.
Na podstawie analizy parametrów silnika BLDC został
dobrany odpowiedni układ półmostka typu H, zbudowany
Rys. 13. Oscylogram komutacji silnika BLDC oraz momentu przełączenia
z dwóch tranzystorów MOSFET na każdą fazę silnika. DoRys. 73. Oscylogram
komutacji
BLDC
oraz
przełączenia na ko
na kolejną
komutację silnika
na podstawie
sygnału
SEMmomentu
i sumy sygnałów
datkowo jedno z wymagań stawianych całemu układowi to
możliwie małe rozmiary. Dlatego został użyty układ scalony komutacje na podstawie sygnału SEM i sumy sygnałów
firmy STM L6234. Przedstawione w poprzednim rozdziale
Podsumowanie
parametry stopnia mocy są wystarczające
do zasilenia silPodsumowanie
nika BLDC. Szczególną uwagę należy zwrócić na napięcie
Napędy z wykorzystaniem silnika BLDC jako elementu wyzasilania (24V – wymagane napięcie zasilania silnika oraz
Uzyskano
parametry
silnika:
szybka
na jest
wymuszenie (
konawczego
znajdują
zastosowanie
tam,odpowiedź
gdzie wymagany
52V – maksymalne napięcie, jakie może
obsłużyć bardzo
stopień dobre
prędkości1,5A,
na żądanym
poziomie
w 0,05 s)
pełnego obrotu
duży
moment obrotowy
(Moraz
= 2,64wykonanie
Nm, z wykorzystaniem
prze- w czasie
mocy), pobierany prąd (silnik pobiera maksymalnie
wekładni),
małe wymiary
długość
105 maksyma
dług noty katalogowej układ scalony wytrzymuje
2,8A,
Zgodnie zdo
założeniami
ster wychyla
się (łączna
o kąt +/12°,silnika
czyli i przekładni:
musi wykonać
mm, szerokość i wysokość: ok. 22 mm) oraz niezawodność
zatem uzyskano około 180% margines bezpieczeństwa dla
o 24°. Obrót ten wykonuje
w 0,00196
s. Przynp.zastosowaniu
przekładni
temperatury 25°C).
(brak wrażliwych
elementów,
szczotek komutatora).
Wła- o przełożen
czas
obrotu
o
24°
wzrasta
do
0,23
s
osiągając
średnią
prędkość
kątową
100°/s.
Ponieważ prędkość obrotowa silnika będzie sterowana syściwości dynamiczne silnika są bardzo dobre w porównaniuokoło
do
gnałem PWM, kolejnym ważnym elementem
jest
pojemność
silników
krokowych
czy
silników
prądu
stałego.
Należy
jednak
Wykonany model działa poprawnie, co świadczy o dobrze dobranych elementach uk
bramki tranzystora. Od tego parametruwłaściwym
zależy: szerokość
że silnikOsiągnięcie
BLDC wymagazamierzonego
bardziej skomplikowanego
sposobiepamiętać,
sterowania.
celu wymagało d
zakresu sterowania prędkością silnika oraz skomplikowanie
układu elektronicznego sterownika, tym bardziej przy wykorzyanalizy
konstrukcji
sterów,
zapoznania
się
z
budową,
zasadą
działania oraz sp
sterownika. Według noty aplikacyjnej L6234 można sterować
staniu bezczujnikowej metody pomiaru kąta położenia wału.
sterowania
silnikami BLDC oraz przeprowadzenia badań na modelu symulacyjn
wewnętrznymi tranzystorami z częstotliwością
do 50 kHz.
Kolejnym etapem jest eliminacja zakłóceń.
Poza fabryczLITERATURA
rzeczywistym.
Napędy
z wykorzystaniem silnika BLDC, jako elementu wykon
nymi elementami stabilizacji napięcia zasilania
znajdującymi
znajdują
zastosowanie
tam,
gdzie wymagany jest duży moment obrotowy (M = 2
1.Baldursson S. „BLDC Motor Modeling and Control – a Matlab/Simulink
się na płytce STM, zastosowano kondensatory 100uF i 0,1uF
z
wykorzystaniem
przekładni),
małe
wymiary
Implementation”,
Sverige,
2005. (łączna długość silnika i przekładni:
podpięte pomiędzy zasilaniem stopnia mocy Vs, a uziemie2.Czyżak
M.
„Demonstrator
napędu
sterów przeciwlotniczego
pocisku
wysokość: około 22 mm) oraz
niezawodność
(brak wrażliwych
eleme
niem GND. W celu odfiltrowania zasilaniaszerokość
sterującegoigórnym
rakietowego”, Praca dyplomowa, WAT, Warszawa 2014.
tranzystorem MOSFET dodatkowo zastosowano
szczotkikondensator
komutatora).3.Chodnicki
Właściwości
dynamiczne
silnika są przeciwlotniczego
bardzo dobre w porów
M. „Demonstrator
pilota automatycznego
220nF. Napięcie odniesienia Vref zostałosilników
sprzężonekrokowych
poprzez
pocisku
rakietowego”,
Pracastałego.
dyplomowa,
WAT, Warszawa
czy
silników
prądu
Należy
jednak2014.
pamiętać, że siln
kondensator 1uF.
4.Dubiel S., Frątczak W. „Konstrukcja pocisków rakietowych: Cz. 3, Konwymaga
bardziej
skomplikowanego
układu
elektronicznego
sterownika,
strukcja podzespołów i wybrane zagadnienia z podstaw projektowania”, tym bard
Sterowanie silnikiem będzie wykorzystywać pomiar siły
Warszawa, WAT
1972. pomiaru kąta położenia wału.
wykorzystaniu
bezczujnikowej
metody
elektromotorycznej SEM, w tym celu należy
zastosować odpo5.Koruba Z., Osiecki J.W. „Budowa, dynamika i nawigacja wybranych
wiedni układ dzielnika napięcia oraz filtracji sygnału. Zostanie
broni precyzyjnego rażenia”, Politechnika Świętokrzyska, Kielce 2006.
wykorzystany filtr dolnoprzepustowy. Pozwala to na właściwe
6.Zawirski K., Deskur J. „Automatyka napędu elektrycznego”, Poznań,
odfiltrowanie zakłóceń układu oraz sygnału PWM.
Wydawnictwo Politechniki Poznańskiej 2012.
Trzecim etapem jest dobór właściwego układu mikropro7.Karta katalogowa firmy Nanotec silnika BLDC DB22L01.
cesorowego do sterownika silnika od którego oczekuje się
8.Karta katalogowa firmy Pololu przekładni Pololu1121.
spełnienia następujących parametrów:
9.Kartka katalogowa firmy STMicroelectronic układu L6234.
■
341