XXI Sympozjum PTZE, Lubliniec 2011
POLSKIE TOWARZYSTWO ZASTOSOWAŃ ELEKTROMAGNETYZMU
Współorganizatorzy:
POLITECHNIKA CZĘSTOCHOWSKA, WYDZIAŁ ELEKTRYCZNY
POLSKO-JAPOŃSKA WYŻSZA SZKOŁA TECHNIK KOMPUTEROWYCH
ZASTOSOWANIA
ELEKTROMAGNETYZMU
W NOWOCZESNYCH TECHNIKACH
I INFORMATYCE
ZAMEK LUBLINIEC, 5-8 czerwca 2011
Patronat Honorowy Konferencji:
Pani Anna Streżyńska – Prezes Urzędu Komunikacji Elektronicznej
Pan Edward Maniura – Burmistrz Lublińca
Patronat medialny:
proAtom – Magazyn Energetyki Jądrowej
Warszawa 2011
1
XXI Sympozjum PTZE, Lubliniec 2011
Sympozjum zorganizowano przy finansowej pomocy Ministerstwa Nauki i Szkolnictwa Wyższego
Sponsorem Sympozjum jest operator sieci komórkowej PLUS
ERA
© Copyright by Polskie Towarzystwo Zastosowań Elektromagnetyzmu
Warszawa 2011
ISBN 83-88131-99-0
POLSKIE TOWARZYSTWO ZASTOSOWAŃ ELEKTROMAGNETYZMU
2
XXI Sympozjum PTZE, Lubliniec 2011
XXI SYMPOZJUM ŚRODOWISKOWE
ZASTOSOWANIA ELEKTROMAGNETYZMU
W NOWOCZESNYCH TECHNIKACH I INFORMATYCE
ZAMEK LUBLINIEC, 5-8 czerwca 2011
Komitet naukowy
Przewodniczący
Andrzej Rusek
Członkowie
Liliana Byczkowska-Lipińska
Katarzyna Ciosk
Aleksander Dackiewicz
Krzysztof Kluszczyński
Romuald Kotowski
Andrzej Krawczyk
Roman Kubacki
Jerzy Paweł Nowacki
Anna Pławiak-Mowna
Andrzej Wac-Włodarczyk
Komitet organizacyjny
Ewa Łada-Tondyra – przewodnicząca
Agnieszka Byliniak
Barbara Grochowicz
3
XXI Sympozjum PTZE, Lubliniec 2011
PROGRAM XXI SYMPOZJUM PTZE Lubliniec 2011
PROGRAMME OF 21st SYMPOSIUM PSAE Lubliniec 2011
NIEDZIELA / SUNDAY (05.06.2011)
16:00 – Rejestracja uczestników / Registration
19:00 – Kolacja / Dinner
PONIEDZIAŁEK / MONDAY (06.06.2011)
9:00 – Otwarcie Sympozjum / Opening ceremony
9:15 – 11:00
SESJA I
SESJA OTWIERAJĄCA / OPENING SESSION
(Chairman: Lidija Petkovska, Andrzej Wac-Włodarczyk)
Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako ANALIZA POLA
ELEKTROMAGNETYCZNEGO ŁADUNKU ELEKTRYCZNEGO PORUSZAJĄCEGO SIĘ
ZE STAŁYM PRZYSPIESZENIEM
Ivo Dolezel, Petr Kropik, Bohus Ulrych MONOLITHIC MODEL OF INDUCTION HEATING
OF A THIN CONDUCTIVE PLATE WITH RESPECTING THERMOELASTICITY
Andrzej Krawczyk, Ewa Łada-Tondyra THE EVOLUTION OF ELECTROMAGNETIC FIELD
LIMITATION IN ICNIRP’S STANDARDS
Miklós Kuczmann PARALLEL FINITE ELEMENT METHOD
Stefan Sieradzki, Damian Kardas NOWOCZESNE TECHNIKI PROJEKTOWANIA
I WYTWARZANIA MASZYN ELEKTRYCZNYCH I TRANSFORMATORÓW
Mitsuhiko Toho DAMAGES OF ELECTRIC POWER FACILITIES CAUSED BY THE 2011
EASTERN JAPAN GREAT EARTHQUAKE AND TSUNAMI – A BRIEF SURVEY
11:00 – 11:30 – Przerwa na kawę / Coffee break
11:30 – 13:30
S E S J A II
ZASTOSOWANIA PEM W MEDYCYNIE I / MEDICAL APPLICATIONS OF EMF I
(Chairman: Eugeniusz Kurgan, Liliana Byczkowska-Lipińska)
4
XXI Sympozjum PTZE, Lubliniec 2011
Arkadiusz Miaskowski, Andrzej Krawczyk MAGNETIC FLUID HYPERTHERMIA
FOR CANCER THERAPY
Remigiusz Rydz ZASTOSOWANIA TELEMEDYCYNY*)
Jaromir Sobiech, Jarosław Kieliszek, Wanda Stankiewicz ODWZOROWANIE STANOWISKA
PRACY W NUMERYCZNEJ OCENIE NARAŻENIA NA POLE ELEKTROMAGNETYCZNE
NA PRZYKŁADZIE OPERATORÓW RADIOSTACJI PLECAKOWYCH
Wanda Stankiewicz, Marek J. Dąbrowski, Jarosław Kieliszek, Jaromir Sobiech, Paweł Bodera,
Andrzej Krawczyk, Maciej P. Dąbrowski IMMUNOMODULACYJNE DZIAŁANIE POLA
900MHZ
Adam Świtoński, Romualda Mucha, Dariusz Danowski, Monika Mucha, Grzegorz Cieślar
Andrzej Polański, Konrad Wojciechowski, Aleksander Sieroń DIAGNOSTYKA PATOLOGII
RUCHU NA PODSTAWIE ZREDUKOWANYCH DANYCH KINEMATYCZNYCH
Adam Świtoński, Romualda Mucha, Dariusz Danowski, Grzegorz Cieślar, Andrzej Polański,
Konrad Wojciechowski, Aleksander Sieroń IDENTYFIKACJA OSOBY NA PODSTAWIE
KINEMATYKI JEJ CHODU
13:30 – Obiad / Lunch
14:30 – 18:30
S E S J A III
SESJA PLAKATOWA / POSTER SESSION
(Chairman: Miralem Hadziselimovic, Katarzyna Ciosk)
Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako O WŁASNOŚCIACH
I ZASTOSOWANIU W ELEKTRODYNAMICE FUNKCJI DELTA DIRACA O
ZESPOLONYM ARGUMENCIE
Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako ROZPRASZANIE FALI
ELEKTROMAGNETYCZNEJ WYSOKIEJ CZĘSTOTLIWOŚCI
NA TRÓJŚCIENNYM NAROŻU PRZEWODZĄCYM
Krzysztof Bareła, Liliana Byczkowska-Lipińska, Henryk Małecki GŁĘBOKOŚĆ WNIKANIA
PROMIENIOWANIA ELEKTROMAGNETYCZNEGO W OBIEKTY BIOLOGICZNE
Marcin Basiaga, Zbigniew Paszenda, Witold Walke BADANIA WŁASNOŚCI
ELEKTROCHEMICZNYCH WARSTW WĘGLOWYCH STOSOWANYCH NA WYROBACH
MEDYCZNYCH
Karol Bednarek BADANIA ELEKTROMAGNETYCZNYCH ODDZIAŁYWAŃ URZĄDZEŃ
SILNOPRĄDOWYCH
Borys Borowik ODKSZTAŁCENIE WSADÓW RUROWYCH WYBRANYCH
MATERIAŁÓW W PROCESIE ELEKTRODYNAMICZNEGO FORMOWANIA METALI
5
XXI Sympozjum PTZE, Lubliniec 2011
Katarzyna Ciosk SEPARACJA CZĄSTEK METODĄ DIELEKTROFOREZY
Agnieszka Duraj, Andrzej Krawczyk DOBÓR MIAR ODLEGŁOŚCI W HIERARCHICZNYCH
METODACH WYKRYWANIA WYJĄTKÓW
Piotr Gas THE HISTORY OF HYPERTHERMIA AND THE ATTEMPTS OF UTILIZING
IT IN ELECTROTHERAPY
Aleksander Gąsiorski, Zdzisław Posyłek TRANSMISYJNA SYMETRYCZNA LINIA
PASKOWA JAKO UKŁAD WYMUSZAJĄCY JEDNORODNE POLE ELEKTRYCZNE
W ZAKRESIE CZĘSTOTLIWOŚCI RADIOWYCH
Dalibor Igrec, Amor Chowdhury, Miralem Hadņiselimović, Bojan Ńtumberger
ENVIRONMENTAL VALUES DETECTION MEASURING CELL FOR EXPLOITATION
OF WIND AND SOLAR RENEWABLE ENERGY
Andrzej Jąderko STANOWISKO Z SILNIKIEM SYNCHRONICZNYM Z MAGNESAMI
TRWAŁYMI PMSM DO BADANIA UKŁADÓW NAPĘDOWYCH Z ELEMENTEM
SPRĘŻYSTYM
Marcin Kaczmarek, Witold Walke, Zbigniew Paszenda ZASTOSOWANIE
ELEKTROCHEMICZNEJ SPEKTROSKOPII IMPEDANCYJNEJ DO OCENY ODPORNOŚCI
KOROZYJNEJ STOPU Ni-Ti
Pavel Karban, Frantińek Mach, Ivo Dolezel MONOLITHIC MODEL OF INDUCTION
HEATING OF CYLINDRICAL NONMAGNETIC BILLETS ROTATING IN A SYSTEM
OF PERMANENT MAGNETS
Wojciech Kołton, Tomasz Trawiński BADANIA DRGAŃ SILNIKÓW WRZECIONOWYCH
PAMIĘCI MASOWYCH
Lucjan Kurzak ŚWIATOWE TENDENCJE WYKORZYSTANIA ENERGII
FOTOWOLTAICZNEJ
Arkadiusz Miaskowski, Sławomir Cięszczyk TWO-STEP INVERSE PROBLEM ALGORITHM
FOR GROUND PENETRATING RADAR TECHNIQUE
Andrzej Popenda ANALYSIS AND INVESTGATIONS INTO SENSORLESS CONTROL
SYSTEM BASED ON DOUBLY FED MACHINE WORKING AS A GENERATOR
Andrzej Rusek A GENERAL MATHEMATICAL MODEL OF DRIVE SYSTEM
FOR POLYMERIZATION REACTOR BASED ON ASYNCHRONOUS INDUCTION
MOTOR WITH PIPE BODY
Andrzej Rusek DETERMINATION OF PARAMETERS TO DEFINE A RESULTANT
INERTIAL MOMENT OF THE DRIVE SYSTEM FOR POLYMERIZATION REACTOR
BASED ON ASYNCHRONOUS INDUCTION MOTOR WITH A PIPE BODY
6
XXI Sympozjum PTZE, Lubliniec 2011
Joanna Michałowska, Arkadiusz Miaskowski, Andrzej Wac-Włodarczyk METODY
WSPOMAGAJĄCE I UZUPEŁNIAJĄCE DETEKCJĘ RAKA GRUCZOŁU PIERSIOWEGO
Bojan Ńtumberger, Miralem Hadņiselimović FLUX-WEAKENING PERFORMANCE OF
FRACTIONAL-SLOT PERMANENT MAGNET SYNCHRONOUS MOTORS WITH
CONCENTRATED WINDINGS
Janusz Szewczenko, Magdalena Pochrząst, Witold Walke OCENA WŁASNOŚCI
ELEKTROCHEMICZNYCH ZMODYFIKOWANEGO POWIERZCHNIOWO STOPU
TI-6AL-4V ELI
Krzysztof Szewczyk, Rafał Golisz , Tomasz Walasek, Zygmunt Kucharczyk WPŁYW
SZCZELINY POWIETRZNEJ WOKÓŁ MAGNESU STAŁEGO NA PRACĘ
KONCENTRATORA STRUMIENIA NABIEGUNNIKA W WIRNIKU SILNIKA
SYNCHRONICZNEGO Z MAGNESAMI STAŁYMI Z WEWNĘTRZNYM OBWODEM
MAGNETYCZNYM
Zygmunt Szymański NOWOCZESNE METODY IDENTYFIKACJI LOKALIZACJI LUDZI
W PODZIEMNYCH WYROBISKACH KOPALNIANYCH ORAZ W JASKINIACH
I TUNELACH KOMUNIKACYJNYCH
Janusz Tykocki WPŁYW PRZEWODNOŚCI CIEPLNEJ GRUNTU NA ROZKŁAD POLA
TEMPERATURY W UKŁADACH KABLOWYCH 110 kV
Agnieszka Wantuch OCHRONA KATODOWA PODZIEMNYCH ZBIORNIKÓW
Bogusław Wisz POJEMNOŚCI SPRZĘGAJĄCE W DWUSTRONNYCH STRUKTURACH
MIKROUKŁADU Z WARSTWĄ DIELEKTRYKA
Mykhaylo Zagirnyak, T. Korenkova, I. Alieksieieva ENHANCEMENT OF INSTANTANEOUS
POWER METHOD IN THE PROBLEMS OF ESTIMATION OF ELECTROMECHANICAL
COMPLEXES POWER CONTROLLABILITY
Wojciech Zając WYDAJNA TRANSMISJA DANYCH WIZYJNYCH PRZEZ ŁĄCZA
RADIOWE O MAŁEJ PRZEPUSTOWOŚCI
15:30 – Walne Zgromadzenia Członków PTZE / General Assembly of the PTZE Members
19:30 – kolacja grillowa / barbecue dinner
WTOREK / TUESDAY (07.06.2011)
9:00 – 10:30
S E S J A IV
ZASTOSOWANIA PEM W MEDYCYNIE II / MEDICAL APPLICATIONS OF EMF II
(Chairman: Ivo Dolezel, Karol Bednarek)
Paweł Bodera, Bożena Antkowiak, Wanda Stankiewicz, Jarosław Kieliszek, Jaromir Sobiech,
Andrzej Krawczyk, Andrzej Wojdas THE INDIRECT SUPPRESSIVE EFFECT OF THE
7
XXI Sympozjum PTZE, Lubliniec 2011
ELECTROMAGNETIC FIELD (EMF) ON ANALGESIC EFFECT OF THE OPIOID DRUG
(TRAMADOL)
Liliana Byczkowska-Lipińska, Agnieszka Wosiak ANALIZA METADANYCH OBRAZÓW
MEDYCZNYCH W DIAGNOSTYCZNYCH SYSTEMACH KOMPUTEROWYCH
Eugeniusz Kurgan NUMERICAL STUDY OF NANOPARTICLE HYPERTHERMIA
Eugeniusz Kurgan, Piotr Gas USE OF RF HYPERTHERMIA FOR TREATMENT OF
TUMORS LOCATED IN THE HUMAN THIGH
Maciej Łopucki, A. Nowakowski, W. Rogowska, Stanisław Pietruszewski THE IMPACT
OF 50HZ OSCILLATING ELECTROMAGNETIC FIELD ON HSP90 EXPRESSION
IN HUMAN PLACENTA COTYLEDON PERFUSED IN VITRO
Anna Pławiak-Mowna, Andrzej Krawczyk REMOTE TRANSMISSION OF CARDIAC
IMPLANT PATIENTS DATA
10:30-11:00 – Przerwa na kawę / Coffee break
11:00 – 13:00
SESJA V
MASZYNY I URZĄDZENIA ELEKTRYCZNE / ELECTRICAL MACHINES AND DEVICES
(Chairman: Mykhaylo Zagirnyak, Roman Kubacki)
Goga Cvetkovkski, Paul Lefley, Lidija Petkovska, Saeed Ahmed A NEW DESIGN OF LOW
COST ENERGY EFFICIENT SINGLE PHASE BRUSHLESS DC MOTOR
Mihail Digalovski, Lidija Petkovska IMPACT OF THE THREE-PHASE TRANSFORMER
TOPOLOGY ON THE LEAKAGE INDUCTANCE
Miralem Hadņiselimović, Matic Blaznik, Bojan Ńtumberger MAGNETICALLY NONLINEAR
DYNAMIC MODEL OF A SERIES WOUND DC MOTOR
Marek Lis A COMPARISON OF MAGNETO-MECHANICAL DEPENDENCIES OF A
BRUSHLEES MOTOR WITH PERMANENT MAGNET EXCITATION IN BLDC AND
PMSM MODES
Lidija Petkovska, Goga Cvetkovski ASSESSMENT OF TORQUES FOR A PERMANENT
MAGNET BRUSHLESS MOTOR USING FEA
Bojan Ńtumberger, Miralem Hadņiselimović DESIGN OF PERMANENT MAGNET
SYNCHRONOUS MACHINE FOR MICRO-HYBRID ELECTRIC VEHICLE OPERATION
Tomasz Trawiński, Krzysztof Kluszczyński MODEL OBWODOWY DWUUZWOJENIOWEGO
SILNIKA VCM DLA SYSTEMÓW POZYCJONOWANIA GŁOWIC DYSKÓW TWARDYCH
8
XXI Sympozjum PTZE, Lubliniec 2011
Peter Virtiĉ VARIATIONS OF PERMANENT MAGNETS DIMENSIONS IN AXIAL FLUX
PERMANENT MAGNET SYNCHRONOUS MACHINE
13:00 – Obiad / Lunch
14:30 – 16:00
S E S J A VI
POLE ELEKTROMAGNETYCZNE W ŚRODOWISKU / ELECTROMAGNETIC FIELD IN ENVIRONMENT
(Chairman: Mitsuhiko Toho, Krzysztof Kluszczyński)
Barbara Atamaniuk, Hanna Rothkaehl ELECTROMAGNETIC AND PLASMA
ENVIRONMENT IN THE MOON SPACE
Paweł Bieńkowski, Hubert Trzaska AN INTEGRATED EXPOSURE SYSTEM
Paweł Bieńkowski, Bartłomiej Zubrzak ŹRÓDŁA POLA ELEKTROMAGNETYCZNEGO W
ŻYCIU CODZIENNYM CZŁOWIEKA
Aleksander Gąsiorski, Zdzisław Posyłek IDENTYFIKACJA POLA
ELEKTROMAGNETYCZNEGO W PRZESTRZENI POMIAROWEJ KOMORY GTEM
Zygmunt J. Grabarczyk UKŁAD DO POMIARU WARTOŚCI ŁADUNKU
ELEKTRYCZNEGO TRANSFEROWANEGO W CZASIE WYŁADOWAŃ
ELEKTROSTATYCZNYCH, DLA POTRZEB OCHRONY PRZECIWWYBUCHOWEJ
Jarosław Kieliszek, Jaromir Sobiech, Wanda Stankiewicz NOWY KIERUNEK W OCENIE
NARAŻENIA NA POLE ELEKTROMAGNETYCZNE W ŚRODOWISKU PRACY. PROJEKT
DOZYMETRU MIKROFALOWEGO
Andrzej Wac-Włodarczyk, Paweł A. Mazurek, Angelika Błażejewska, Grzegorz Masłowski,
Tobiasz Parys, Katarzyna Przytuła, Łukasz Ziętek POMIARY EMISJI
ELEKTROMAGNETYCZNEJ W.CZ. W BUDYNKACH KAMPUSU POLITECHNIKI
LUBELSKIEJ
Joanna Wyszkowska, Maria Stankiewicz POLE ELEKTROMAGNETYCZNE – ATRAKTANT
CZY REPELENT DLA OWADÓW?
16:00 – 16:30 – Przerwa na kawę / Coffee break
16:30 – 18:00
S E S J A VII
ELEKTROMAGNETYZM I MATERIAŁY / ELECTROMAGNETICS AND MATERIALS
(Chairman: Miklos Kuczman, Wanda Stankiewicz)
Antoni Cieśla WYSOKOGRADIENTOWY SEPARATOR MAGNETYCZNY
W ZASTOSOWANIU DO ROZDZIELANIA I WZBOGACANIA GAZÓW
9
XXI Sympozjum PTZE, Lubliniec 2011
Roman Kubacki, Jarosław Ferenc, R. Przesmycki SKUTECZNOŚĆ EKRANOWANIA
NANOKRYSTALICZNEGO PROSZKU STOPU FE SI B CU NB W ZAKRESIE
MIKROFALOWYM
Marek Kuchta, Marek Szulim ELEKTRONICZNY ZESTAW POMIAROWY DO BADAŃ
DIAGNOSTYCZNYCH PROTEZ ZĘBOWYCH PRZY WYMUSZENIACH
DYNAMICZNYCH
Eugeniusz Kurgan FORCE CALCULATION IN AC DIELECTROPHORESIS
Paweł A. Mazurek ANALIZA ZABURZEŃ PROMIENIOWANYCH REAKTORA
PLAZMOWEGO TYPU GLIDARC
Mariusz Najgebauer ZJAWISKO GIGANTYCZNEJ MAGNETOIMPEDANCJI W
ZASTOSOWANIACH PRAKTYCZNYCH
Paweł Surdacki WPŁYW WARUNKÓW PRACY NA PARAMETRY ZANIKANIA
NADPRZEWODZENIA W PRZEWODZIE NADPRZEWODNIKOWYM MgB2/Cu
Andrzej Wac-Włodarczyk, Andrzej Kaczor WPŁYW PODSTAWOWYCH PARAMETRÓW
PRACY REAKTORA PLAZMOWEGO TYPU GLIDARC NA WARTOŚCI ZABURZEŃ
PRZEWODZONYCH
19:30 – Obiad konferencyjny / Conference dinner
ŚRODA / WEDNESDAY (08.06.2011)
9:00 – 10:30
S E S J A VIII
SYMULACJE KOMPUTEROWE I / COMPUTER SIMULATIONS I
(Chairman: Barbara Atamaniuk, Konrad Wojciechowski)
Karol Bednarek, Leszek Kasprzyk, Andrzej Tomczewski APLIKACJE WIELOWĄTKOWE W
OBLICZENIACH ELEKTROMAGNETYCZNYCH I OPTYMALIZACYJNYCH UKŁADÓW
ELEKTRYCZNYCH
Barbara Grochowicz, Witold Kosiński LAGRANGE'S METHOD FOR DERIVATION AND
SOLVING LONG LINE EQUATIONS
Dariusz Kusiak, Zygmunt Piątek, Tomasz Szczegielniak WPŁYW ODLEGŁOŚCI MIĘDZY
PRZEDOWODAMI A EKRANEM NA POLE MAGNETYCZNE EKRANOWANEGO
DWUPRZEWODOWEGO BIFILARNEGO TORU WIELKOPRĄDOWEGO
Tomasz Rymarczyk, Stefan F. Filipowicz SOLVING INVERSE PROBLEM IN EIT BY
LEVENBERG–MARQUARDT LEVEL SET METHOD
10
XXI Sympozjum PTZE, Lubliniec 2011
Adam Świtoński, Tomasz Błachowicz, Marcin Zieliński, Marta Misiuk-Hojto, Konrad
Wojciechowski DIAGNOSTYKA PRZEDNIEGO I TYLNEGO ODCINKA GAŁKI OCZNEJ Z
WYKORZYSTANIEM OBRAZOWANIA WIELOSPEKTRALNEGO
Mykhaylo Zagirnyak, A. Kalinov, M. Maliakova AN ALGORITHM FOR THE ELECTRIC
CIRCUITS CALCULATION ON THE BASIS OF INSTANTANEOUS POWER
COMPONENTS BALANCE
10:30 – 11:00 – Przerwa na kawę / Coffee break
11:00 – 12:30
S E S J A IX
SYMULACJE KOMPUTEROWE II / COMPUTER SIMULATIONS II
(Chairman: Anna Pławiak-Mowna, Romuald Kotowski)
Paweł Bieńkowski, Bartłomiej Zubrzak OPTYMALIZACJA ALGORYTMÓW
WYZNACZANIA CHARAKTERYSTYK METROLOGICZNYCH CZUJNIKÓW POLA
ELEKTROMAGNETYCZNEGO
Konstanty M. Gawrylczyk INVERSE TASKS OF ELECTROMAGNETIC FIELD UTILIZING
SENSITIVITY ANALYSIS IN THE TIME DOMAIN
Paweł Jabłoński APPROXIMATE BEM ANALYSIS OF THIN MAGNETIC SHIELD
OF VARIABLE THICKNESS
Eugeniusz Kurgan, Agnieszka Wantuch MODELLING OF THE CURRENT
AND POTENTIAL DISTRIBUTION IN CAVITY CORROSION
Michał Łanczont APROKSYMACYJNY MODEL PĘTLI HISTEREZY DLA MODELI
NUMERYCZNYCH OBWODÓW NIELINIOWYCH
12:30 – Zakończenie konferencji / Closing Cremony
13:00 – Obiad / Lunch
11
XXI Sympozjum PTZE, Lubliniec 2011
SPIS REFERATÓW
Wprowadzenie .................................................................................................................................... 18
1. Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako ANALIZA POLA
ELEKTROMAGNETYCZNEGO ŁADUNKU ELEKTRYCZNEGO PORUSZAJĄCEGO
SIĘ ZE STAŁYM PRZYSPIESZENIEM .................................................................................... 20
2. Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako WŁASNOŚCIACH
I ZASTOSOWANIU W ELEKTRODYNAMICE FUNKCJI DELTA DIRACA
O ZESPOLONYM ARGUMENCIE .......................................................................................... 21
3. Stanisław Apanasewicz, Stanisław Pawłowski, Jolanta Plewako ROZPRASZANIE FALI
ELEKTROMAGNETYCZNEJ WYSOKIEJ CZĘSTOTLIWOŚCI NA TRÓJŚCIENNYM
NAROŻU PRZEWODZĄCYM .................................................................................................. 22
4. Barbara Atamaniuk, Hanna Rothkaehl ELECTROMAGNETIC AND PLASMA
ENVIRONMENT IN THE MOON SPACE ............................................................................... 25
5.
Krzysztof Bareła, Liliana Byczkowska-Lipińska, Henryk Małecki GŁĘBOKOŚĆ WNIKANIA
PROMIENIOWANIA ELEKTROMAGNETYCZNEGO W OBIEKTY BIOLOGICZNE
Krzysztof Bareła, Liliana Byczkowska-Lipińska, Henryk Małecki ........................................... 26
6. Marcin Basiaga, Zbigniew Paszenda, Witold Walke BADANIA WŁASNOŚCI
ELEKTROCHEMICZNYCH WARSTW WĘGLOWYCH STOSOWANYCH
NA WYROBACH MEDYCZNYCH ......................................................................................... 31
7. Karol Bednarek, Leszek Kasprzyk, Andrzej Tomczewski APLIKACJE WIELOWĄTKOWE
W OBLICZENIACH ELEKTROMAGNETYCZNYCH I OPTYMALIZACYJNYCH
UKŁADÓW ELEKTRYCZNYCH ............................................................................................. 34
8. Karol Bednarek BADANIA ELEKTROMAGNETYCZNYCH ODDZIAŁYWAŃ
URZĄDZEŃ SILNOPRĄDOWYCH ......................................................................................... 39
9. Paweł Bieńkowski, Hubert Trzaska AN INTEGRATED EXPOSURE SYSTEM ...................... 42
10. Paweł Bieńkowski, Bartłomiej Zubrzak OPTYMALIZACJA ALGORYTMÓW
WYZNACZANIA CHARAKTERYSTYK METROLOGICZNYCH CZUJNIKÓW POLA
ELEKTROMAGNETYCZNEGO .............................................................................................. 44
11. Paweł Bieńkowski, Bartłomiej Zubrzak ŹRÓDŁA POLA ELEKTROMAGNETYCZNEGO
W ŻYCIU CODZIENNYM CZŁOWIEKA ................................................................................ 49
12. Paweł Bodera, Bożena Antkowiak, Wanda Stankiewicz, Jarosław Kieliszek, Jaromir Sobiech,
Andrzej Krawczyk, Andrzej Wojdas THE INDIRECT SUPPRESSIVE EFFECT OF THE
ELECTROMAGNETIC FIELD (EMF) ON ANALGESIC EFFECT OF THE OPIOID DRUG
(TRAMADOL) ............................................................................................................................ 53
13. Borys Borowik ODKSZTAŁCENIE WSADÓW RUROWYCH WYBRANYCH
MATERIAŁÓW W PROCESIE ELEKTRODYNAMICZNEGO FORMOWANIA
METALI ...................................................................................................................................... 57
14. Liliana Byczkowska-Lipińska, Agnieszka Wosiak ANALIZA METADANYCH OBRAZÓW
MEDYCZNYCH W DIAGNOSTYCZNYCH SYSTEMACH KOMPUTEROWYCH ............. 60
15. Antoni Cieśla WYSOKOGRADIENTOWY SEPARATOR MAGNETYCZNY
W ZASTOSOWANIU DO ROZDZIELANIA I WZBOGACANIA GAZÓW ........................... 62
12
XXI Sympozjum PTZE, Lubliniec 2011
16. Katarzyna Ciosk SEPARACJA CZĄSTEK METODĄ DIELEKTROFOREZY ....................... 65
17. Goga Cvetkovkski, Paul Lefley, Lidija Petkovska, Saeed Ahmed A NEW DESIGN
OF LOW COST ENERGY EFFICIENT SINGLE PHASE BRUSHLESS DC MOTOR ........... 67
18. Venco Ĉorluka, Ņeljko Hederić, Miralem Hadņiselimović MOISTURE MEASUREMENT
IN SOLID SAMPLES USING RAMAN SPECTROSCOPY ..................................................... 70
19. Mihail Digalovski, Lidija Petkovska IMPACT OF THE THREE-PHASE TRANSFORMER
TOPOLOGY ON THE LEAKAGE INDUCTANCE .................................................................. 73
20. Ivo Dolezel, Petr Kropik, Bohus Ulrych MONOLITHIC MODEL OF INDUCTION
HEATING OF A THIN CONDUCTIVE PLATE WITH RESPECTING
THERMOELASTICITY ............................................................................................................. 76
21. Agnieszka Duraj, Andrzej Krawczyk DOBÓR MIAR ODLEGŁOŚCI
W HIERARCHICZNYCH METODACH WYKRYWANIA WYJĄTKÓW ............................. 79
22. Piotr Gas THE HISTORY OF HYPERTHERMIA AND THE ATTEMPTS OF UTILIZING
IT IN ELECTROTHERAPY ....................................................................................................... 81
23. K.M. Gawrylczyk INVERSE TASKS OF ELECTROMAGNETIC FIELD UTILIZING
SENSITIVITY ANALYSIS IN THE TIME DOMAIN ............................................................. 83
24. Aleksander Gąsiorski, Zdzisław Posyłek IDENTYFIKACJA
POLA ELEKTROMAGNETYCZNEGO W PRZESTRZENI POMIAROWEJ
KOMORY GTEM ...................................................................................................................... 86
25. Aleksander Gąsiorski, Zdzisław Posyłek TRANSMISYJNA SYMETRYCZNA LINIA
PASKOWA JAKO UKŁAD WYMUSZAJĄCY JEDNORODNE POLE ELEKTRYCZNE
W ZAKRESIE CZĘSTOTLIWOŚCI RADIOWYCH................................................................ 89
26. Zygmunt J. Grabarczyk UKŁAD DO POMIARU WARTOŚCI ŁADUNKU
ELEKTRYCZNEGO TRANSFEROWANEGO W CZASIE WYŁADOWAŃ
ELEKTROSTATYCZNYCH, DLA POTRZEB OCHRONY
PRZECIWWYBUCHOWEJ ....................................................................................................... 93
27. Barbara Grochowicz, Witold Kosiński LAGRANGE'S METHOD FOR DERIVATION
AND SOLVING LONG LINE EQUATIONS ........................................................................... 96
28. Miralem Hadņiselimović, Matic Blaznik, Bojan Ńtumberger MAGNETICALLY
NONLINEAR DYNAMIC MODEL OF A SERIES WOUND DC MOTOR ............................. 97
29. Dalibor Igrec, Amor Chowdhury, Miralem Hadņiselimović, Bojan Ńtumberger
ENVIRONMENTAL VALUES DETECTION MEASURING CELL FOR EXPLOITATION
OF WIND AND SOLAR RENEWABLE ENERGY ................................................................ 100
30. Paweł Jabłoński APPROXIMATE BEM ANALYSIS OF THIN MAGNETIC SHIELD
OF VARIABLE THICKNESS .................................................................................................. 102
31. Andrzej Jąderko STANOWISKO Z SILNIKIEM SYNCHRONICZNYM
Z MAGNESAMI TRWAŁYMI PMSM DO BADANIA UKŁADÓW NAPĘDOWYCH
Z ELEMENTEM SPRĘŻYSTYM ............................................................................................ 105
13
XXI Sympozjum PTZE, Lubliniec 2011
32. Marcin Kaczmarek, Witold Walke, Zbigniew Paszenda ZASTOSOWANIE
ELEKTROCHEMICZNEJ SPEKTROSKOPII IMPEDANCYJNEJ
DO OCENY ODPORNOŚCI KOROZYJNEJ STOPU NI-TI................................................... 108
33. Pavel Karban, Frantińek Mach, Ivo Dolezel MONOLITHIC MODEL OF INDUCTION
HEATING OF CYLINDRICAL NONMAGNETIC BILLETS ROTATING
IN A SYSTEM OF PERMANENT MAGNETS ....................................................................... 110
34. Jarosław Kieliszek, Jaromir Sobiech, Wanda Stankiewicz NOWY KIERUNEK
W OCENIE NARAŻENIA NA POLE ELEKTROMAGNETYCZNE W ŚRODOWISKU
PRACY. PROJEKT DOZYMETRU MIKROFALOWEGO .................................................... 113
35. Wojciech Kołton, Tomasz Trawiński BADANIA DRGAŃ SILNIKÓW
WRZECIONOWYCH PAMIĘCI MASOWYCH ..................................................................... 116
36. Andrzej Krawczyk, Ewa Łada-Tondyra THE EVOLUTION OF ELECTROMAGNETIC
FIELD LIMITATION IN ICNIRP’S STANDARDS ................................................................ 118
37. Roman Kubacki, Jarosław Ferenc, R. Przesmycki SKUTECZNOŚĆ EKRANOWANIA
NANOKRYSTALICZNEGO PROSZKU STOPU FE SI B CU NB W ZAKRESIE
MIKROFALOWYM ................................................................................................................. 121
38. Marek Kuchta, Marek Szulim ELEKTRONICZNY ZESTAW POMIAROWY
DO BADAŃ DIAGNOSTYCZNYCH PROTEZ ZĘBOWYCH
PRZY WYMUSZENIACH DYNAMICZNYCH ...................................................................... 124
39. Miklós Kuczmann PARALLEL FINITE ELEMENT METHOD ............................................ 127
40. Eugeniusz Kurgan FORCE CALCULATION IN AC DIELECTROPHORESIS .................... 129
41. Eugeniusz Kurgan, Agnieszka Wantuch MODELLING OF THE CURRENT
AND POTENTIAL DISTRIBUTION IN CAVITY CORROSION .......................................... 132
42. Eugeniusz Kurgan NUMERICAL STUDY OF NANOPARTICLE HYPERTHERMIA.......... 136
43. Eugeniusz Kurgan, Piotr Gas USE OF RF HYPERTHERMIA FOR TREATMENT
OF TUMORS LOCATED IN THE HUMAN THIGH .............................................................. 141
44. Lucjan Kurzak ŚWIATOWE TENDENCJE WYKORZYSTANIA ENERGII
FOTOWOLTAICZNEJ ............................................................................................................. 144
45. WPŁYW ODLEGŁOŚCI MIĘDZY PRZEDOWODAMI A EKRANEM NA POLE
MAGNETYCZNE EKRANOWANEGO DWUPRZEWODOWEGO BIFILARNEGO
TORU WIELKOPRĄDOWEGO Dariusz Kusiak, Zygmunt Piątek, Tomasz Szczegielniak .... 147
46. Marek Lis A COMPARISON OF MAGNETO-MECHANICAL DEPENDENCIES
OF A BRUSHLEES MOTOR WITH PERMANENT MAGNET EXCITATION
IN BLDC AND PMSM MODES .............................................................................................. 150
47. Michał Łanczont APROKSYMACYJNY MODEL PĘTLI HISTEREZY
DLA MODELI NUMERYCZNYCH OBWODÓW NIELINIOWYCH ................................... 152
48. Maciej Łopucki, A. Nowakowski, W. Rogowska, Stanisław Pietruszewski THE IMPACT
OF 50HZ OSCILLATING ELECTROMAGNETIC FIELD ON HSP90 EXPRESSION
IN HUMAN PLACENTA COTYLEDON PERFUSED IN VITRO ......................................... 154
14
XXI Sympozjum PTZE, Lubliniec 2011
49. Paweł A. Mazurek ANALIZA ZABURZEŃ PROMIENIOWANYCH REAKTORA
PLAZMOWEGO TYPU GLIDARC ......................................................................................... 157
50. Arkadiusz Miaskowski, Andrzej Krawczyk MAGNETIC FLUID HYPERTHERMIA
FOR CANCER THERAPY ...................................................................................................... 160
51. Arkadiusz Miaskowski, Sławomir Cięszczyk TWO-STEP INVERSE PROBLEM
ALGORITHM FOR GROUND PENETRATING RADAR TECHNIQUE .............................. 162
52. Joanna Michałowska, Arkadiusz Miaskowski, Andrzej Wac-Włodarczyk METODY
WSPOMAGAJĄCE I UZUPEŁNIAJĄCE DETEKCJĘ RAKA
GRUCZOŁU PIERSIOWEGO .................................................................................................. 164
53. Mariusz Najgebauer ZJAWISKO GIGANTYCZNEJ MAGNETOIMPEDANCJI
W ZASTOSOWANIACH PRAKTYCZNYCH ........................................................................ 166
54. Lidija Petkovska, Goga Cvetkovski ASSESSMENT OF TORQUES FOR
A PERMANENT MAGNET BRUSHLESS MOTOR USING FEA ......................................... 169
55. Anna Pławiak-Mowna, Andrzej Krawczyk REMOTE TRANSMISSION
OF CARDIAC IMPLANT PATIENTS DATA ......................................................................... 173
56. Andrzej Popenda ANALYSIS AND INVESTGATIONS INTO SENSORLESS
CONTROL SYSTEM BASED ON DOUBLY FED MACHINE WORKING
AS A GENERATOR ................................................................................................................ 174
57. Andrzej Rusek A GENERAL MATHEMATICAL MODEL OF DRIVE SYSTEM
FOR POLYMERIZATION REACTOR BASED ON ASYNCHRONOUS
INDUCTION MOTOR WITH PIPE BODY ............................................................................ 177
58. Andrzej Rusek DETERMINATION OF PARAMETERS TO DEFINE
A RESULTANT INERTIAL MOMENT OF THE DRIVE SYSTEM
FOR POLYMERIZATION REACTOR BASED ON ASYNCHRONOUS
INDUCTION MOTOR WITH A PIPE BODY ......................................................................... 180
59. ZASTOSOWANIE TELEMEDYCYNY Remigiusz Rydz ....................................................... 183
60. Tomasz Rymarczyk, Stefan F. Filipowicz SOLVING INVERSE PROBLEM
IN EIT BY LEVENBERG–MARQUARDT LEVEL SET METHOD...................................... 185
61. Stefan Sieradzki, Damian Kardas NOWOCZESNE TECHNIKI PROJEKTOWANIA
I WYTWARZANIA MASZYN ELEKTRYCZNYCH I TRANSFORMATORÓW ................ 188
62. Jaromir Sobiech, Jarosław Kieliszek, Wanda Stankiewicz ODWZOROWANIE
STANOWISKA PRACY W NUMERYCZNEJ OCENIE NARAŻENIA NA POLE
ELEKTOMAGNETYCZNE NA PRZYKŁADZIE OPERATORÓW RADIOSTACJI
PLECAKOWYCH ..................................................................................................................... 200
63. Wanda Stankiewicz, Marek J. Dąbrowski, Jarosław Kieliszek, Jaromir Sobiech,
Paweł Bodera, Andrzej Krawczyk, Maciej P. Dąbrowski IMMUNOMODULACYJNE
DZIAŁANIE POLA 900MHZ ................................................................................................... 203
64. Bojan Ńtumberger, Miralem Hadņiselimović DESIGN OF PERMANENT MAGNET
SYNCHRONOUS MACHINE FOR MICRO-HYBRID ELECTRIC VEHICLE
OPERATION............................................................................................................................. 206
15
XXI Sympozjum PTZE, Lubliniec 2011
65. Bojan Ńtumberger, Miralem Hadņiselimović FLUX-WEAKENING PERFORMANCE
OF FRACTIONAL-SLOT PERMANENT MAGNET SYNCHRONOUS MOTORS
WITH CONCENTRATED WINDINGS ................................................................................... 208
66. Paweł Surdacki WPŁYW WARUNKÓW PRACY NA PARAMETRY ZANIKANIA
NADPRZEWODZENIA W PRZEWODZIE NADPRZEWODNIKOWYM MgB2/Cu .......... 211
67. Adam Świtoński, Romualda Mucha, Dariusz Danowski, Monika Mucha, Grzegorz Cieślar,
Andrzej Polański, Konrad Wojciechowski, Aleksander Sieroń DIAGNOSTYKA
PATOLOGII RUCHU NA PODSTAWIE ZREDUKOWANYCH
DANYCH KINEMATYCZNYCH ............................................................................................ 213
68. Adam Świtoński, Tomasz Błachowicz, Marcin Zieliński, Marta Misiuk-Hojto,
Konrad Wojciechowski DIAGNOSTYKA PRZEDNIEGO I TYLNEGO ODCINKA
GAŁKI OCZNEJ Z WYKORZYSTANIEM OBRAZOWANIA
WIELOSPEKTRALNEGO ....................................................................................................... 217
69. Adam Świtoński, Romualda Mucha, Dariusz Danowski, Grzegorz Cieślar, Andrzej Polański,
Konrad Wojciechowski, Aleksander Sieroń IDENTYFIKACJA OSOBY
NA PODSTAWIE KINEMATYKI JEJ CHODU ..................................................................... 220
70. Janusz Szewczenko, Magdalena Pochrząst, Witold Walke OCENA WŁASNOŚCI
ELEKTROCHEMICZNYCH ZMODYFIKOWANEGO POWIERZCHNIOWO
STOPU TI-6AL-4V ELI ............................................................................................................ 223
71. Krzysztof Szewczyk, Rafał Golisz , Tomasz Walasek, Zygmunt Kucharczyk WPŁYW
SZCZELINY POWIETRZNEJ WOKÓŁ MAGNESU STAŁEGO NA PRACĘ
KONCENTRATORA STRUMIENIA NABIEGUNNIKA W WIRNIKU SILNIKA
SYNCHRONICZNEGO Z MAGNESAMI STAŁYMI Z WEWNĘTRZNYM OBWODEM
MAGNETYCZNYM ................................................................................................................. 225
72. Zygmunt Szymański NOWOCZESNE METODY IDENTYFIKACJI LOKALIZACJI
LUDZI W PODZIEMNYCH WYROBISKACH KOPALNIANYCH ORAZ
W JASKINIACH I TUNELACH KOMUNIKACYJNYCH ..................................................... 227
73. Mitsuhiko Toho DAMAGES OF ELECTRIC POWER FACILITIES CAUSED
BY THE 2011 EASTERN JAPAN GREAT EARTHQUAKE AND TSUNAMI –
A BRIEF SURVEY ................................................................................................................... 228
74. Tomasz Trawiński, Krzysztof Kluszczyński MODEL OBWODOWY
DWUUZWOJENIOWEGO SILNIKA VCM DLA SYSTEMÓW POZYCJONOWANIA
GŁOWIC DYSKÓW TWARDYCH ......................................................................................... 230
75. Janusz Tykocki WPŁYW PRZEWODNOŚCI CIEPLNEJ GRUNTU
NA ROZKŁAD POLA TEMPERATURY W UKŁADACH KABLOWYCH 110 kV ............ 232
76. Peter Virtiĉ VARIATIONS OF PERMANENT MAGNETS DIMENSIONS
IN AXIAL FLUX PERMANENT MAGNET SYNCHRONOUS MACHINE ......................... 235
77. Andrzej Wac-Włodarczyk, Paweł A. Mazurek, Angelika Błażejewska, Grzegorz Masłowski,
Tobiasz Parys, Katarzyna Przytuła, Łukasz Ziętek POMIARY EMISJI
ELEKTROMAGNETYCZNEJ W.CZ. W BUDYNKACH KAMPUSU
POLITECHNIKI LUBELSKIEJ ............................................................................................... 238
78. Andrzej Wac-Włodarczyk, Andrzej Kaczor WPŁYW PODSTAWOWYCH PARAMETRÓW
PRACY REAKTORA PLAZMOWEGO TYPU GLIDARC NA WARTOŚCI ZABURZEŃ
PRZEWODZONYCH ............................................................................................................... 241
16
XXI Sympozjum PTZE, Lubliniec 2011
79. Agnieszka Wantuch OCHRONA KATODOWA PODZIEMNYCH ZBIORNIKÓW .............. 244
80. Bogusław Wisz POJEMNOŚCI SPRZĘGAJĄCE W DWUSTRONNYCH
STRUKTURACH MIKROUKŁADU Z WARSTWĄ DIELEKTRYKA ................................. 247
81. Joanna Wyszkowska, Maria Stankiewicz POLE ELEKTROMAGNETYCZNE –
ATRAKTANT CZY REPELENT DLA OWADÓW? .............................................................. 250
82. Mykhaylo Zagirnyak, A. Kalinov, M. Maliakova AN ALGORITHM
FOR THE ELECTRIC CIRCUITS CALCULATION ON THE BASIS
OF INSTANTANEOUS POWER COMPONENTS BALANCE ............................................. 253
83. Mykhaylo Zagirnyak, T. Korenkova, I. Alieksieieva ENHANCEMENT
OF INSTANTANEOUS POWER METHOD IN THE PROBLEMS OF ESTIMATION
OF ELECTROMECHANICAL COMPLEXES POWER CONTROLLABILITY ................... 256
84. Wojciech Zając WYDAJNA TRANSMISJA DANYCH WIZYJNYCH PRZEZ ŁĄCZA
RADIOWE O MAŁEJ PRZEPUSTOWOŚCI ........................................................................... 259
17
XXI Sympozjum PTZE, Lubliniec 2011
WPROWADZENIE
Tegoroczne XXI Sympozjum PTZE odbywa się w Lublińcu, mieście leżącym onegdaj na granicy
polsko-pruskiej czy w XX wieku polsko-niemieckiej. Tradycją spotkań PTZE jest to, że organizowane
są w różnych ciekawych miejscach Polski – mamy nadzieję, że takim ciekawym miejscem okaże się
dla uczestników Lubliniec. Miasto sięga czasów kiedy władali nim książęta opolscy i istnieją budowle
i miejsca przypominające jego historię. Ale Lubliniec jest miastem, z którym związana jest mocno
kultura i nauka europejska. Jest sprawą dla miasta bardzo ważną, że upodobała je sobie na wakacyjne
wypady do dziadków Edyta Stein, wielka filozofka, święta Kościoła Katolickiego, ofiara Holokaustu.
Samuel Courant, lubliniecki handlowiec i jego żona Adelajda byli dziadkami Edyty i to do nich
właśnie przyjeżdżała z rodzinnego Wrocławia (Breslau) Edyta. Doceniając i dziadków Courantów
i upodobania Edyty do ich odwiedzania mieszkańcy Lublińca uczynili ją w 2008 roku Patronką
Miasta. Dom Courantów stoi na tym samym miejscu, a zatem można go zobaczyć, a od kilku lat
również obejrzeć w nim muzeum poświęcone Edycie Stein.
Ale Courantowie i Lubliniec mogą się szczycić również drugim wielkim wnukiem i obywatelem,
a mianowicie Richardem Courantem, wielkim matematykiem, kuzynem Edyty, który przyszedł tamże
na świat w 1888 roku i przez 3 lata był mieszkańcem Lublińca. Potem rodzice Richarda przenieśli się
do Kłodzka (Glatzu), a potem do Wrocławia, gdzie Richard podjął studia matematyczne. Zachęcony
opiniami o działalności Davida Hilberta w Getyndze przeniósł się tam i dalsze jego losy jako
matematyka w dużej mierze związały się z Hilbertem. W 1933 roku w obliczu zbliżającego się
szaleństwa nazistowskiego Courant udał się do Stanów Zjednoczonych Ameryki Północnej gdzie
kontynuował swoją karierę matematyka. Pracował na uniwersytecie w Nowym Jorku gdzie stworzył
silny ośrodek badawczy w matematyce stosowanej. Zmarł w 1972 roku.
Najciekawszym dla uczestników XXI Sympozjum PTZE jest nie tylko życiorys Richarda Couranta,
ale to, że część jego twórczości matematycznej ściśle wiąże się z obszarem naszej działalności. Otóż,
Richard Courant był twórcą, tak przynajmniej uważa wielu historyków nauki, metody elementów
skończonych. Każdy, kto zetknął się z symulacjami komputerowymi, wie jaką rolę
w elektromagnetyzmie obliczeniowym odegrała ta metoda analizy numerycznej, i nadal odgrywa.
Richard Courant zastosował do rozwiązania zagadnienia brzegowego metodę wariacyjną, którą
zalgorytmizował poprzez wprowadzenie podziału obszaru na elementy trójkątne. Ale żeby jeszcze
bardziej Couranta wpleść w nasze Sympozjum to podajmy jeszcze, ze ojcem drugiej żony Couranta,
Neriny, był Carl Runge, słynny matematyk od metody Rungego-Kutty, metody iteracyjnego
rozwiązywania układów równań różniczkowych. Ale żeby zadowolić też tych uczestników
sympozjum, którzy nie prowadzą symulacji komputerowych a badają procesy elektromagnetyczne
i biologiczne trzeba dodać, że dziadkiem Nelly, teściem Carla, był słynny fizjolog Emil Du BoisReymond, niemiecki lekarz i zoolog, prekursor eksperymentalnej elektrofizjologii, badacz
elektryczności zwierząt.
Może z tego właśnie powodu XXI Sympozjum PTZE przyciągnęło uwagę wielu badaczy, zgłoszono
bowiem nadzwyczajnie dużą liczbę uczestników, chyba rekordową w historii naszych spotkań. Jak
zwykle referaty dotyczą wielu dziedzin zastosowań elektromagnetyzmu, a wyróżniające się grupy
tematyczne to elektromagnetyzm w inżynierii elektrycznej, elektromagnetyzm w środowisku
bioelektromagnetyzm) i elektromagnetyzm obliczeniowy. Cechą spotkań PTZE jest właśnie owa
różnorodność tematyczna, co czyni te spotkania zupełnie wyjątkowymi na mapie konferencyjnej
kraju, i nie tylko; gromadzą one badaczy z rozmaitych obszarów, od inżynierii elektrycznej poprzez
fizykę do biologii i medycyny. Drugą cechą spotkań PTZE jest prawie równoliczny udział młodych
badaczy oraz kadry profesorskiej. Przynosi to korzyści zarówno tym młodym – mogą korzystać
z doświadczenia i wiedzy profesorskiej, jak i tym starszym – uzyskują ciekawe i twórcze inspiracje ze
strony młodzieży naukowej. Obecne sympozjum jest doskonałą ilustracją obu tych cech.
18
XXI Sympozjum PTZE, Lubliniec 2011
Sympozjum współorganizowane jest przez Wydział Elektryczny Politechniki Częstochowskiej oraz
Polsko-Japońską Wyższą Szkołę Technik Komputerowych. W tym miejscu chciałbym podziękować
Władzom obydwu instytucji, Panu Dziekanowi Andrzejowi Ruskowi i Panu Rektorowi Jerzemu
Pawłowi Nowackiemu za ich wkład w zorganizowanie konferencji.
Materiały po-konferencyjne zostaną wydane w Przeglądzie Elektrotechnicznym oraz Acta Technica
CSAV w normalnej procedurze wydawniczej. Tutaj też chcę podziękować wydawcom tych pism,
Panu Profesorowi Sławomirowi Tumańskiemu i Panu Profesorowi Ivo Dolezelovi za ich pomoc
w realizacji materiałów po-konferencyjnych.
W imieniu organizatorów XXI Sympozjum PTZE życzę wszystkim jego uczestnikom owocnych
obrad, budowania twórczych kontaktów interdyscyplinarnych i między instytucjami, ale też życzę
twórczego wykorzystania atmosfery Lublińca, miasta Edyty Stein i Richarda Couranta.
Andrzej Krawczyk, Prezes PTZE
19
XXI Sympozjum PTZE, Lubliniec 2011
ANALIZA POLA ELEKTROMAGNETYCZNEGO ŁADUNKU
ELEKTRYCZNEGO PORUSZAJĄCEGO SIĘ ZE STAŁYM
PRZYSPIESZENIEM
Stanisław Apanasewicz1, Stanisław Pawłowski1, Jolanta Plewako2
1
Politechnika Rzeszowska
Katedra Elektrodynamiki i Układów Elektromaszynowych
2
Katedra Energoelektroniki i Elektroenergetyki
W pracy wykorzystano wzory Liénarda-Wiecherta do obliczenia pola elektromagnetycznego
ładunku elektrycznego poruszającego się ze stałym przyspieszeniem a. Zakłada się, że ruch
ładunku odbywa się pod wpływem stałej siły, tzn. jest opisywany w przybliżeniu
nierelatywistycznym. Przedstawiono pełny opis pola elektromagnetycznego zarówno w
strefie bliskiej jak i dalekiej. Istotnym osiągnięciem pracy jest otrzymanie uogólnionych
transformat Lorentza, czasowo-przestrzennych, wiążących współrzędne (x, t) w układzie
inercjalnym ze współrzędnymi (x’, t’) w układzie poruszającym się ze stałym
przyspieszeniem. Przekształcenia te mają postać:
x'
gdzie:
c2
a
a
t 1
c
c2 a
x t ' 1
a c
c
xa
t ' 1 2 t
a c
c
x' a
t 1 2 t
a
c
2a
2a
1 2 x ct , 1 2 x'ct ' .
c
c
(1)
(2)
Innym ważnym wynikiem pracy jest wykazanie, że prędkość światła w układzie
przyspieszonym jest mniejsza od prędkości światła w układach inercjalnych c. Problem
prędkości światła w układach nieinercjalnych jest dotychczas mało zbadany.
Przedstawione uogólnione przekształcenia Lorentza dla układu przyspieszonego wiążą tylko
współrzędne czasoprzestrzenne (x, t) z (x’, t’), natomiast nie udało się dotychczas otrzymać
przekształceń wiążących składowe pola elektromagnetycznego. W przypadku przejścia
między układami inercjalnymi przekształcenia takie (transformacje Lorentza dla pól)
otrzymuje się korzystając z zasady równoważności, tj. z faktu, że równania Maxwella
w każdym układzie inercjalnym mają taką samą postać. Przy przechodzeniu do układu
nieinercjalnego zasada ta nie obowiązuje i stąd pojawiają się trudności w znalezieniu
analogicznych wzorów transformacyjnych.
20
XXI Sympozjum PTZE, Lubliniec 2011
O WŁASNOŚCIACH I ZASTOSOWANIU
W ELEKTRODYNAMICE
FUNKCJI DELTA DIRACA O ZESPOLONYM ARGUMENCIE
Stanisław Apanasewicz1, Stanisław Pawłowski1, Jolanta Plewako2
1
Politechnika Rzeszowska
Katedra Elektrodynamiki i Układów Elektromaszynowych
2
Katedra Energoelektroniki i Elektroenergetyki
Zagadnienie dyfrakcji fali elektromagnetycznej na narożu przewodzącym (rys. 1). można
rozwiązać stosując transformaty Liebiediewa-Kontorowicza (z jądrem w postaci funkcji
Bessela z urojonym wskaźnikiem) [1]. W trakcie obliczeń pojawia się problem wyznaczania
shSt
wartości całek postaci:
cos tdt , gdzie: S , S0, – wielkości niezależne od zmiennej
shS 0t
0
całkowania t. Dla S < S0 całka ta jest zbieżna w normalnym sensie (Riemanna) [2], dla S = S0
mamy: cos t d , natomiast dla S > S0 jest ona rozbieżna. Jak się okazuje, ten ostatni
0
przypadek odpowiada opisowi pola fali ugiętej w obszarze cienia (por. rys. 1), stanowi więc
istotny i trudny problem obliczeniowy. Autorzy znaleźli sposób jego rozwiązania na drodze
uogólnienia funkcji delta Diraca na dziedzinę liczb zespolonych, tzn.:
x jy, j 2 1 . Pozwala to na nadanie poprawnego sensu całkom rozbieżnym typu:
0
0
0
t
e cos t dt ,
sh t sint dt i
podobnym. Otrzymujemy na przykład:
cieo
,
ch t cos t dt ,
sh t sint dt 2 j j j .
0
W pracy przedstawiono szereg własności
uogólnionej w ten sposób funkcji delta
Diraca i podano przykładowe jej
zastosowania w teorii pola elektromagnetycznego.
fala padająca
Rys. 1. Dyfrakcja płaskiej fali elektromagnetycznej
na narożu przewodzącym
Literatura
[1] S. Apanasewicz, S. Pawłowski, J. Plewako,: The study of the flat waves’ diffraction on the sharp corner,
Przegląd Elektrotechniczny (Electrical Review), str. 87 – 90, 5/2010
[2] J. S. Gradstein, J. M. Rizhikh, Tables of Integrals, Series, Sums and Products, Moscov, 1962, str. 518
21
XXI Sympozjum PTZE, Lubliniec 2011
ROZPRASZANIE FALI ELEKTROMAGNETYCZNEJ
WYSOKIEJ CZĘSTOTLIWOŚCI
NA TRÓJŚCIENNYM NAROŻU PRZEWODZĄCYM
Stanisław Apanasewicz1, Stanisław Pawłowski1, Jolanta Plewako2
1
Politechnika Rzeszowska
Katedra Elektrodynamiki i Układów Elektromaszynowych
2
Katedra Energoelektroniki i Elektroenergetyki
Wstęp
Wyznaczanie rozkładów pól elektromagnetycznych w układach zawierających ciała
przewodzące z krawędziami i narożami o małym promieniu krzywizny stwarza szereg
rożnego rodzaju trudności obliczeniowych. Wiążą się one głównie z tym, iż w pobliżu
krawędzi i naroży pole doznaje gwałtownych zmian na małych odległościach, czyli funkcje
pola stają się mało regularne. W przypadku stosowania typowych numerycznych metod
obliczeniowych, jak MES, czy MRS, szczegółowe uwzględnienie tych zmian wymaga
zastosowania bardzo gęstej dyskretyzacji obszarów w pobliżu takich powierzchni, co
prowadzi do znacznego powiększenia numerycznego modelu zagadnienia. Dodatkowe
trudności pojawiają się w przypadkach gdy obszar stanowiący otoczenie ciała przewodzącego
jest nieograniczony, jak np. w zagadnieniach rozpraszania fali elektromagnetycznej na ciele
przewodzącym. Problemy te stają się szczególnie uciążliwe w przypadku zagadnień
trójwymiarowych. W tej sytuacji dość powszechną praktyką jest ignorowanie efektów
występujących w sąsiedztwie krawędzi i naroży wskutek niedostosowania siatki
dyskretyzacyjnej do zmienności funkcji pola. Rozwiązania takie obarczone są dużymi
błędami lokalnymi; trudno też ocenić w jakim stopniu te błędy mogą wpływać na poprawność
określenia rozkładu pola w pozostałej części rozpatrywanego obszaru.
Nadrzędnym przedsięwzięciem autorów niniejszej pracy jest, z jednej strony, zbadanie na
drodze symulacji numerycznych efektów fizycznych w bliskim sąsiedztwie krawędzi i naroży
ciał przewodzących oraz z drugiej, dokonanie oceny w jakim stopniu ignorowanie tych
efektów może wpływać na dokładność obliczeń rozkładu pola w pozostałej części obszaru.
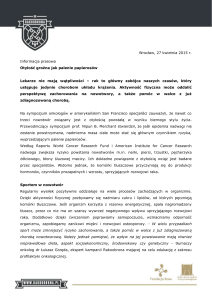
Celem niniejszej pracy jest analiza zagadnienia rozproszenia fali elektromagnetycznej
wysokiej częstotliwości na typowych narożach
występujących w miejscu styku trzech wzajemnie
prostopadłych
ścian
(rys.1)
jednorodnego
i izotropowego ciała przewodzącego o stałych
parametrach materiałowych. W celu uniknięcia
trudności
związanych
z
nieograniczonością
powierzchni granicznych do analizy przyjęto obszar
przewodzący
mający
kształt
sześcianu
z zaokrąglonymi krawędziami i wierzchołkami (rys. 2)
o boku kilkukrotnie większym od długości fali.
Parametry materiałowe obszaru przewodzącego
Rys. 1. Naroże trójścienne
przyjęto jak dla aluminium oraz typowej stali
konstrukcyjnej (w liniowym zakresie krzywej
22
XXI Sympozjum PTZE, Lubliniec 2011
magnesowania). Jako pole wzbudzające przyjęto płaską falę elektromagnetyczną o
częstotliwości 10 GHz i polaryzacji równoległej do jednej z krawędzi naroża.
Sformułowanie zagadnienia
Rozpatrywane zagadnienie dotyczy więc analizy rozkładu harmonicznego pola
elektromagnetycznego wewnątrz i w otoczeniu ciała przewodzącego o kształcie sześcianu z
zaokrąglonymi krawędziami i wierzchołkami,
oddziaływującego z zewnętrznym polem płaskiej fali
elektromagnetycznej. Geometrię układu wraz z
przyjętym układem współrzędnych kartezjańskich
ilustruje rys. 2. Początek O układu współrzędnych
przyjęto w geometrycznym środku sześcianu, zaś
orientację osi równolegle do jego krawędzi. Pole
wzbudzające jest falą płaską rozchodzącą się w
kierunku równoległym do osi OX spolaryzowaną
równolegle do osi OY
Przy poczynionych założeniach, zespolone amplitudy
E i H wektorów natężeń pól elektrycznego
i magnetycznego spełniają równania:
Rys. 2. Analizowany układ
rotH n E
divH 0
rotE n H
divE 0
gdzie: n n jn , n jn , n 1, 2 , - przewodność elektryczna, - przenikalność elektryczna, µ - przenikalność magnetyczna, n – numer ośrodka. Składowe pola
elektromagnetycznego muszą ponadto spełniać klasyczne warunki brzegowe na powierzchni
granicznej:
H ||I H ||II ,
E||I E||II ,
1 H I 2 H II ,
1 EI 2 EII ,
gdzie symbole || i oznaczają styczną i normalną (odpowiednio) składową pola do
powierzchni brzegowej, górny indeks I dotyczy składowych pola od strony otoczenia
sześcianu, zaś II – od strony jego wnętrza.
Metoda rozwiązania
W celu rozwiązania sformułowanego zagadnienia zastosowano iteracyjno-brzegową metodę
numeryczną szczegółowo opisaną w [1]. Jej główna idea polega na aproksymacji
poszukiwanych funkcji pola indukowanego za pomocą kombinacji liniowej rozwiązań
fundamentalnych układu zespolonych równań Maxwella. Rozwiązania te można
interpretować jako superpozycję pola emitowanego przez nieskończenie krótką antenę
dipolową oraz pola emitowanego przez nieskończenie małą antenę pętlową. Współczynniki
sumy aproksymacyjnej obliczane są w taki sposób, aby w każdym kroku iteracyjnym
zminimalizować funkcjonał błędu brzegowego rozwiązania. Iteracyjno-brzegowy charakter
metody pozwala radykalnie ograniczyć wielkość modelu numerycznego i czas obliczeń oraz
23
XXI Sympozjum PTZE, Lubliniec 2011
pozwala uniknąć konieczności sztucznego ograniczania obszarów otwartych występujących w
analizowanym układzie (tutaj – przestrzeni otaczającej sześcian).
Literatura
[1] Pawłowski S.: Iteracyjno-brzegowa metoda analizy trójwymiarowych zagadnień quasi-stacjonarnych
zagadnień elektrodynamiki, Oficyna Wydawnicza Politechniki Rzeszowskiej, Rzeszów, (2009)
[2] Pawłowski S., Plewako J.: Application of iterative boundary method in determination of 3D harmonic
electromagnetic field induced by current ducts. Przegląd Elektrotechniczny, 86 (2010), No 12, 109-112.
24
XXI Sympozjum PTZE, Lubliniec 2011
ELECTROMAGNETIC AND PLASMA ENVIRONMENT
IN THE MOON SPACE
Barbara Atamaniuk, Hanna Rothkaehl
Space Research Centre of the Polish Academy of Sciences, Warsaw
Investigation of electromagnetic and plasma environment around the lunar surface and the
near-moon space is of great importance from the viewpoints of science, technology, and
manned explorations in the near future. One of the remarkable features of the lunar
environment is charging up of the surface of the moon; above all, the lunar surface on the
night side occasionally charges strongly negative, and upward-accelerated electrons by a large
potential difference between the surface and the spacecraft can be measured in the near-moon
space. However, accurate estimation of the lunar surface potential has been difficult, because
the spacecraft itself should have an unknown electrostatic potential relative to the ambient
plasma.
Plasma, photons, micrometeorites and energetic particles constantly bombard the lunar
surface, producing a tenuous exosphere and a dynamic wake region, and charging the surface
to electrostatic potentials reaching kilovolts, producing surface electric fields large enough to
affect lunar ions and dust. Meanwhile, plasma interacts directly with crustal magnetic fields,
producing perhaps the smallest magnetospheres in the solar system.
Lunar dust can exhibit unusual behavior {due to electron photoemission via solar-UV
radiation the lunar surface represents a complex plasma {―dusty plasma"). The dust grains and
lunar surface are electrostatically charged by the Moon's interaction with the local plasma
environment and the photoemission of electrons due to solar UV and X-rays. This e_ect
causes the like-charged surface and dust particles to repel each other, and creates a nearsurface electric_field. Lunar dust must be treated as a dusty plasma. Using analytic (kinetic
(Vlasov) and magnetohydrodynamic theory) and numerical modeling we show physical
processes related to levitation and transport dusty plasma on the Moon. These dust grains
could a_ect the lunar environment for radio wave and plasma diagnostics and interfere with
exploration activities.
This research is supported by grant O N517 418440
25
XXI Sympozjum PTZE, Lubliniec 2011
GŁĘBOKOŚĆ WNIKANIA PROMIENIOWANIA
ELEKTROMAGNETYCZNEGO W OBIEKTY BIOLOGICZNE
Krzysztof Bareła, Liliana Byczkowska-Lipińska, Henryk Małecki
Wyższa Szkoła Informatyki, Łódź
W pracy rozpatrzono oddziaływanie niejonizującego pola elektromagnetycznego PEM na
organizmy biologiczne. W wyniku oddziaływania pola część mocy padającego strumienia
ulega odbiciu od powierzchni a część wchodząca do ośrodka ulega absorpcji. W wyniku
absorpcji natężenie wiązki pola PEM w ośrodku maleje wykładniczo. W tabeli 1 i 2 podano
wartości współczynnika odbicia dla skóry, tłuszczu i mięśni w funkcji częstotliwości. Dla
wszystkich analizowanych tkanek wartość współczynnika odbicia maleje ze wzrostem
częstotliwości osiągając wartość maksymalną w ośrodku powietrze-skóra. W tabeli 3 i 4
podano głębokości wnikania pola PEM w tkanki biologiczne. Głębokość wnikania dla
rozpatrywanego zakresu częstotliwości maleje z jej wzrostem.
Dla częstotliwości 100 MHz głębokość wnikania PEM w skórę wynosi 3,8 cm, a dla 1,1 1015
Hz głębokość wnikania wynosi 0,06 mm. Ze wzrostem częstotliwości energia fotonów
wzrasta co powoduje zwiększenie prawdopodobieństwa oddziaływania fotonu.
Z tego powodu promieniowanie podczerwone stosunkowo głęboko penetruje poszczególne
tkanki biologiczne, co pozwala stosować je w fotolecznictwie.
Intensywne badania efektów biologicznych ekspozycji pola elektromagnetycznego PEM na
organizmy żywe trwają już kilkadziesiąt lat. Istnieje bardzo wiele, zarówno udowodnionych,
jak i przypuszczalnych mechanizmów działania pola PEM na obiekty biologiczne.
Mechanizmy tych oddziaływań są ciągle nieznane. Przedstawiono na ten temat szereg
hipotez, lecz wymagają one dalszego badania. Próby wytłumaczenia fizycznych
mechanizmów biologicznego oddziaływania PEM i wyznaczenia minimalnych natężeń, przy
których PEM może działać na obiekty biologiczne zwykle oceniane są na podstawie analizy
wzajemnych energetycznych oddziaływań pola PEM z tymi obiektami. Szeroko zakrojone
badania dotyczyły fizyczno - chemicznych procesów zachodzących w żywych tkankach pod
działaniem pola PEM oraz zależności tego oddziaływania od makroskopowych parametrów
obiektów biologicznych
W pewnych zakresach częstotliwości tkanki biologiczne, dla których wymiary liniowe R
(ciała człowieka i dużych, a tym bardziej małych zwierząt) są małe w porównaniu
z długością fali (=30m), można traktować jak ośrodek przewodzący. Do tych zakresów
częstotliwości można zaliczyć częstotliwości PEM poniżej 10MHz.
Dla zakresu częstotliwości większych od 100MHz (=3m) wymiary liniowe R ciała
ludzkiego i większych zwierząt są porównywalne z długością fali lub też większe (R >).
W tym zakresie częstotliwości tkanki biologiczne nie mogą być traktowane jako. ośrodek
przewodzący jednorodny pod względem własności elektrycznych.
Oznacza to, że warunek quazistacjonarności R<< nie jest spełniony i pole
elektromagnetyczne należy rozpatrywać, jako strumień promieni, których część odbija się od
powierzchni ciała, a reszta stopniowo jest pochłaniana przez niejednorodne elektrycznie
tkanki.
26
XXI Sympozjum PTZE, Lubliniec 2011
Po uwzględnieniu współczynnika odbicia, moc PEM pochłaniana przez powierzchnię obiektu
(moc efektywna Pe) wynosi
Pe = P0 (1 - ),
(1)
gdzie: P0 – gęstość strumienia mocy padającego na powierzchnię ciała,
– współczynnik odbicia.
Na podstawie danych z literatury [2, 3, 6, 7] przedstawiono, wartości współczynnika odbicia i
głębokość wnikania pola PEM w głąb, dla różnych tkanek biologicznych (tabele 1,2,3,4).
Promieniowanie elektromagnetyczne przechodząc przez ośrodek materialny ulega osłabieniu.
Strumień promieniowania w takiej wiązce, przechodząc przez warstwę pochłaniającą w
kierunku osi x ulega osłabieniu według wzoru:
Φ Φ0 exp[( ( ) x)] ,
(2)
gdzie:0 – jest strumieniem promieniowania elektromagnetycznego dla x = 0.
( ) – jest współczynnikiem osłabienia, przyjmuje wartości nieujemne i ma wymiar
odwrotności długości. Jego wartość określa stopień osłabienia wiązki promieniowania w
miarę przesuwania się w głąb ośrodka. Współczynnik osłabienia podobnie jak współczynnik
załamania, zależy od długości fali elektromagnetycznej. Współczynnik osłabienia
( ) zależy od rodzaju ośrodka, przez który przechodzi promieniowanie.
Osłabienie wiązki promieniowania elektromagnetycznego niejonizującego przechodzącego
przez warstwę pochłaniającą wywołane jest przez dwa zjawiska [1]:
właściwe pochłanianie (absorpcję) ( ) ,
rozpraszanie (odbicie dyfuzyjne) ( ) .
Łączne działanie obu tych zjawisk wywołuje ekstynkcję (osłabienie promieniowania):
(3)
( ) ( ) ( ) .
Oba te współczynniki określają zmianę strumienia lub natężenia promieniowania I, po
przebyciu pewnej odległości x w ośrodku, spowodowaną absorpcją i rozpraszaniem, zgodnie
z zależnością wynikającą z równania (2):
I I 0 e ( ) x .
(4)
W sposób ścisły współczynniki te definiuje się, jako:
( ), ( )
d I ,
Id x
,
(5)
gdzie: I , – zmiana natężenia promieniowania na drodze dx, spowodowana absorpcją lub
rozpraszaniem [1, 2].
Na podstawie zależności (4) określa się średnią głębokość wnikania promieniowania do
ośrodka, jako głębokość, na której natężenie promieniowania maleje e-krotnie i stanowi miarę
głębokości wnikania promieniowania w ośrodek.
Pomiędzy współczynnikiem pochłaniania ( ) a współczynnikiem ekstynkcji (osłabienie
promieniowania) ( ) istnieje ścisła zależność [3]:
λ
α(λ)
μ(λ) ,
(6)
4π
gdzie: – długość fali w próżni.
Jeżeli przez λ1 oznaczy się długość fali w ośrodku, to współczynnik ekstynkcji dla tego
ośrodka można określić zależnością:
λ
α1(λ) 1 μ(λ1 ) .
(7)
4π
27
XXI Sympozjum PTZE, Lubliniec 2011
Z zależności
a ekstynkcją:
(6) i
(7) otrzymuje
n
związek między współczynnikami
(λ )
1 ( λ1 )
załamania
.
(8)
Po przekształceniu równania (4) otrzymuje się zależność:
1
I
x
ln .
( ) I 0
(9)
Znając ( ) dla określonej długości fali można doświadczalnie wyznaczyć natężenie
promieniowania I oraz I0 i obliczyć głębokość wnikania promieniowania
elektromagnetycznego.
Dla ośrodków takich jak: woda, szkło, złoto i tym podobne, stosunkowo prosto można
wyznaczyć parametry charakteryzujące ekstynkcję promieniowania elektromagnetycznego i
głębokość wnikania promieniowania w ośrodek [3].
Inaczej wygląda problem dla ośrodka zawierającego różne substancje. Dla takiego ośrodka
równanie (4) można zapisać następująco:
I I0 e ( 1 ( ) 2 ( ) ...) x I0 e ( ) x ,
(10)
n
gdzie: (λ ) αi( ) .
i 1
Najbardziej złożonymi obiektami są organizmy biologiczne. Zagadnieniem odbicia
i wnikania fali elektromagnetycznej w różne tkanki poświęcono wiele prac teoretycznych i
doświadczalnych.
Wartości współczynnika ( ) odbicia PEM od różnych tkanek przy różnych
częstotliwościach przedstawiono w tabeli 1 [3].
Tabela. 1. Współczynniki odbicia PEM od różnych tkanek przy różnych częstotliwościach.
Granica
rozdziału
100
MHz
200
MHz
400
MHz
1 000
MHz
3 000
MHz
10 000
MHz
24 000
MHz
Powietrze –
skóra
Skóra –
tłuszcz
Tłuszcz –
mięśnie
0,758
0,684
0,623
0,570
0,550
0,530
0,470
0,340
0,227
-
0,231
0,190
0,230
0,320
0,355
0,352
0,300
0,261
-
-
-
Należy zwrócić uwagę, że przy przejściu PEM z powietrza (próżnia) do skóry współczynnik
odbicia ( ) w porównaniu z innymi tkankami (np. skóra – tłuszcz) jest dwukrotnie większy
dla każdego zakresu częstotliwości PEM. Jak wynika z danych zawartych w tabeli 1 wartość
współczynników odbicia ( ) na granicy dwóch ośrodków maleje ze wzrostem częstotliwości
pola PEM.
Dla ośrodka powietrze – skóra wynosi on 0,758 (dla 100MHz) i 0,470 (dla częstotliwości 24
GHz). Ta tendencja zmniejszania się współczynnika ( ) odbicia pola PEM od powierzchni
skóry przejawia się także dla PEM w obszarze UV (tabela 2) [7].
28
XXI Sympozjum PTZE, Lubliniec 2011
Przeciętną zdolność skóry ludzkiej do odbijania promieniowania UV dla różnych
częstotliwości zestawiono w tabeli 2.
Tabela 2. Współczynnik ( ) odbicia promieniowania UV od powierzchni skóry w zależności od częstotliwości
[7]
f 1015 Hz
( )
0,75
0,154
0,79
0,120
0,83
0,058
0,88
0,045
0,94
0,038
1,00
0,027
1,10
0,012
Jak wynika ze wzoru (1) im mniejszy jest współczynnik odbicia ( ) tym większy jest
strumień mocy przenikający w głąb tkanek.
Głębokość wnikania energii PEM w głąb tkanek (głębokość, na której natężenie PEM jest
mniejsze e razy) zestawiono w tabeli 3 dla różnych tkanek w funkcji częstotliwości [3].
Tabela 3. Głębokość wnikania fal elekromagnetycznych w różne tkanki, cm
Tkanka
Szpik kostny
Mózgowie
Soczewka oczna
Ciało szkliste
Tłuszcz
Mięśnie
Krew
Skóra
100
MHz
200
MHz
400
MHz
1000
MHz
3000
MHz
22,9
3,56
9,42
2,17
20,45
3,451
2,86
3,765
20,66
4,132
4,39
1,69
12,53
2,32
2,15
2,78
18,73
2,072
4,23
1,41
8,52
1,84
1,787
2,18
11,9
1,933
2,915
1,23
6,42
1,456
1,40
1,638
9,924
0,476
0,500
0,535
2,45
0,78
0,646
10
000
MHz
0,34
0,168
0,179
0,195
1,1
0,314
0,148
0,189
24 000
MHz
35 000
MHz
0,145
0,075
0,0706
0,045
0,342
0,0598
0,0722
0,073
0,0378
0,0378
0,0314
0,0272
-
Głębokość przenikania promieniowania UV w funkcji częstotliwości podana jest w tabeli 4 [7].
Tabela 4. Średnia głębokość wnikania promieniowania UV o różnej częstotliwości w skórę człowieka
Częstotliwość f
1015 Hz
x [mm]
0,75
0,79
0,83
0,88
0,94
1,00
1,10
0,27
0,25
0,22
0,18
0,12
0,08
0,06
Z danych zawartych w tabeli 3 i 4 wynika, że wzrostem częstotliwości fali czyli ze wzrostem
energii fotonów promieniowania elektromagnetycznego głębokość wnikania pola PEM
maleje.
Energię fotonów promieniowania elektromagnetycznego łatwo można obliczyć ze wzoru:
E = h f,
(11)
gdzie: h = 6,631034 Js jest stałą Plancka,
f – częstotliwość promieniowania.
Wartości energii fotonów dla kilku zakresów częstotliwości podano w tabeli 5.
Tabela 5. Energia fotonów dla wybranych częstotliwości PEM
Długość fali
(100 – 400) nm
(400 - 750) nm
750 nm – 1 mm
Częstotliwość f
(3 – 0,75)1015 Hz
(0,75 – 0,4)1015 Hz
0.41015 Hz – 300 GHz
Energia fotonów E
(12,5 – 3) eV
(3 – 16) eV
(1,6 – 0,0012) eV
Należy zwrócić uwagę na fakt, że przy częstotliwości około 2 GHz współczynnik odbicia
PEM powietrze-skóra wynosi, około 0,56 czyli ponad 50 % padającego promieniowania
29
XXI Sympozjum PTZE, Lubliniec 2011
zostaje odbita od powierzchni skóry (tab. 1). Ta część strumienia promieniowania wchodząca
do skóry dla wyżej wymienionych częstotliwości zostaje osłabiona e – krotnie przy wnikaniu
na głębokość około 0,6 cm (tab. 3).
Na podstawie danych w tabelach można sądzić, że nadmierne obawy społeczeństwa przed
promieniowaniem elektromagnetycznym PEM pochodzącym od telefonii komórkowej nie są
w pełni uzasadnione.
Literatura
[1]
[2]
[3]
[4]
[5]
[6]
[7]
J.W. Kane, M.M. Sternheim. Physics, New York 1998
A. Cader, J. Jankowski. Zagrożenia fizyczne i biologiczne. ISBN 83-88261-05-3
A.S. Presman. Elektromagnitnyje polja i żiwaja priroda. Izdatielstwo, Nauka, Moskwa 1998
M. Villee. Biologia. OW, Warszawa 2000
Henry H. Sherk. Lasers in orthopaedics. London 2008
G. Straburzyński. Fizjoterapia. ISBN 83-200-1283-X
A. Cader, J. Jankowski. Reflection of UV – radiation from different skin types. Health Phys 74, 169 – 172,
1998
30
XXI Sympozjum PTZE, Lubliniec 2011
BADANIA WŁASNOŚCI ELEKTROCHEMICZNYCH
WARSTW WĘGLOWYCH STOSOWANYCH
NA WYROBACH MEDYCZNYCH
Marcin Basiaga, Zbigniew Paszenda, Witold Walke
Politechnika Śląska, Instytut Materiałów Inżynierskich i Biomedycznych, Gliwice
Wstęp
Warstwy węglowe stosowane są w wielu dziedzinach życia, odznaczając się wieloma
interesującymi własnościami, które w sposób bezpośredni wynikają z zastosowanych
parametrów procesu oraz metody ich wytwarzania. W zależności od rodzaju wytworzonej
warstwy oraz użytego podłoża stosuje się je w tak odmiennych dziedzinach jak obróbka
skrawaniem, elektronika czy medycyna. W ostatnich latach pojawiają się coraz częstsze
doniesienia o korzystnym wpływie warstw węglowych na własności użytkowe implantów
oraz narzędzi chirurgicznych. Wykorzystywanie warstw węglowych w zastosowaniach
medycznych jest szczególnie zalecane, ponieważ charakteryzują się one wysoką biotolerancją
co czyni je ważnym materiałem na pokrycia implantów. Z kolei duża twardość oraz
odporność na ścieranie to cechy wykorzystywane w przypadku narzędzi chirurgicznych.
W literaturze obserwuje się ciągły wzrost ilości publikacji dotyczących wykorzystania warstw
węglowych jako perspektywicznych materiałów na wyroby medyczne. Jednakże niewiele
miejsca poświęca się zagadnieniom elektrochemicznym tych warstw. Dlatego też w pracy
przeprowadzono badania potencjodynamiczne oraz impedancyjne w celu określenia
własności elektrochemicznych wytworzonych warstw węglowych.
Materiał i metody
Materiał do badań stanowiły stal austenityczna Cr-Ni-Mo (typu 316 LVM) oraz stal
martenzytyczna X39Cr13 w postaci krążków o średnicy d=14 mm i grubości 2 mm. Próbki
poddawano obróbce powierzchniowej obejmującej realizację następujących procesów:
bębnowania w wodnej zawiesinie zawierającej kształtki ceramiczne, pasywacji chemicznej
oraz nanoszenia warstw węglowych. Proces nanoszenia warstw realizowano
z wykorzystaniem metod rozkładu węglowodorów w plazmie wzbudzonej w polu wysokiej
częstotliwości RF PACVD oraz magnetronowej RMS. Dla oceny własności
elektrochemicznych powłok przeprowadzono badania odporności korozyjnej metodą
potencjodynamiczną oraz impedancyjną. Badania prowadzono w roztworze fizjologicznym
Tyrode'a w temperaturze T = 37 ±1C. Pomiary realizowano z wykorzystaniem systemu
pomiarowego AutoLab PGSTAT 302N wyposażonego w moduł FRA2 (Frequency Response
Analyser). Elektrodę odniesienia stanowiła nasycona elektroda kalomelowa NEK typu KP113, natomiast jako pomocniczą stosowano elektrodę platynową typu PtP-201.
Wyniki
Na podstawie przeprowadzonych badań potencjodynamicznych stwierdzono, że potencjał
korozyjny dla próbek bębnowanych przyjmował wartości z zakresu Ekor = -409 -395 mV
(dla stali X39Cr13) i Ekor = -158 -124 mV (dla stali Cr-Ni-Mo). Polaryzacja próbek
31
XXI Sympozjum PTZE, Lubliniec 2011
spowodowała gwałtowny wzrost natężenia prądu anodowego przy potencjałach z zakresu
Enp= +85 ÷ +142 mV (dla stali X39Cr13) i Enp = +710 ÷ +715 mV (dla stali Cr-Ni-Mo). Po
osiągnięciu wartości prądu anodowego równiej 1 mA/cm2 zmieniano kierunek polaryzacji
próbek, co pozwoliło na zarejestrowanie krzywej powrotnej. Zarejestrowane w ten sposób
krzywe polaryzacji anodowej charakteryzowały się obecnością pętli histerezy, świadczącej
o przebiegu korozji wżerowej. Dodatkowo na podstawie metody Sterna wyznaczono wartości
oporu polaryzacyjnego i gęstości prądu korozyjnego, które wynosiły odpowiednio R p = 9,3 ÷
11,8 kcm2 (dla stali X39Cr13) i Rp = 202 ÷ 334 kcm2 (dla stali Cr-Ni-Mo) oraz ikor = 2,20
÷ 2,79 µA/cm2, ikor = 0,03 ÷ 0,12 µA/cm2. Badania przeprowadzone na próbkach
z naniesionymi warstwami węglowymi (po procesie bębnowania i pasywacji chemicznej)
wykazały, że wartości potencjałów korozyjnych i przebicia były większe w odniesieniu do
próbek jedynie bębnowanych. Przykładowo dla stali Cr-Ni-Mo wartości te wynosiły
odpowiednio: Ekor= +143 ÷ +185 mV i Enp = +1304 ÷ +1319 mV - metoda magnetronowa;
Ekor= +39 ÷ +43 mV i Enp = +1252 ÷ +1300 mV - metoda RF PACVD. Również wartości
pozostałych parametrów wskazują na poprawę odporności korozyjnej próbek z naniesioną
warstwą węglową. Na podstawie analizy uzyskanych wyników zarówno dla próbek ze stali
X39Cr13 jak i Cr-Ni-Mo można stwierdzić, że najkorzystniejszym rozwiązaniem jest
wytworzenie na powierzchni próbek bębnowanych i spasywowanych warstwy węglowej
z wykorzystaniem metody magnetronowej.
W pracy przeprowadzono również badania z wykorzystaniem elektrochemicznej
spektroskopii impedancyjnej, które są liniowym pomiarem elektrycznej odpowiedzi badanego
materiału metalowego na pobudzenie elektromagnetycznym sygnałem w szerokim paśmie
częstotliwości. W ramach badań zarejestrowano wykresy przedstawiające zależności |Z|=f1(ω)
i Ф=f2(ω) gdzie Z(ω)=ZjФ (wykres Nyquista) oraz Z’=f(Z’’), gdzie Z(ω)=Z’+jZ’’ (wykres
Bode'ego). Uzyskane wyniki stanowiły istotną informację o własnościach
elektrochemicznych wytworzonych warstw powierzchniowych. Dla próbek bębnowanych nie
zależnie od rodzaju materiału najlepsze dopasowanie wyznaczonych eksperymentalnie widm
impedancyjnych uzyskuje się stosując elektryczny obwód równoważny z dwiema stałymi
czasowymi - R(QR)(QR). Naniesienie warstwy węglowej metodą RF PACVD na próbki ze
stali X39Cr13 spowodowało pojawienie się w układzie dodatkowego elementu - impedancji
Wartburga - R(QR)(Q[RW]), która odwzorowuje wpływ reagentów na proces korozji. Z kolei
w przypadku warstwy węglowej naniesionej metodą magnetronową struktura warstwy
powierzchniowej charakteryzowana była tak jak w przypadku próbek bębnowanych
elektrycznym obwodem z dwiema stałymi czasowymi - R(QR)(QR). Na podstawie
wyznaczonych wartości parametrów elementów elektrycznego obwodu zastępczego, które
charakteryzują procesy zachodzące w badanych układach stwierdzono, że najkorzystniejszym
wariantem jest naniesienie warstwy węglowej metodą magnetronową na powierzchnię próbek
ze stali Cr-Ni-Mo - tab. 1.
Tabela 1. Wyniki elektrochemicznej spektroskopii impedancyjnej
Sposób przygotowania powierzchni
Rs,
Ωcm2
Rct,
kΩcm2
CPEdl
Ydl,
Ω-1cm−2s−n
n1
Rp,
kΩcm2
CPEp
Yp,
Ω-1cm−2s−n
n2
W,
µΩ
C1,
µF
Stal X39Cr13
bębnowanie
51
1
0,1759e-3
0,81
1
0,1277e-1
0,94
-
-
bębnowanie + pasywacja
bębnowanie + pasywacja
+ warstwa C (met. magnetronowa)
bębnowanie + pasywacja
+ warstwa C (met. RF PACVD)
59
-
-
-
4
0,1079e-3
0,83
-
-
55
13 820
0,3816e-6
0,73
80 000
0,3365e-6
0,88
-
-
61
3 600
0,2151e-4
0,76
132
0,3225e-5
0,99
13
-
bębnowanie
57
-
130
0,2020e-3
0,79
-
158
Stal Cr-Ni-Mo
16
-
32
XXI Sympozjum PTZE, Lubliniec 2011
Sposób przygotowania powierzchni
bębnowanie + pasywacja
bębnowanie + pasywacja
+ warstwa C (met. magnetronowa)
bębnowanie + pasywacja
+ warstwa C (met. RF PACVD)
n1
Rp,
kΩcm2
-
CPEdl
Ydl,
Ω-1cm−2s−n
-
-
593
58
80 300
0,5066e-6
0,71
2 212
0,1406e-6
50
102
0,3521e-5
0,91
7 700
0,6302e-5
Rs,
Ωcm2
Rct,
kΩcm2
60
33
CPEp
Yp,
n2
Ω-1cm−2s−n
0,6576e-4 0,88
W,
µΩ
C1,
µF
-
-
0,80
-
-
0,83
-
-
XXI Sympozjum PTZE, Lubliniec 2011
APLIKACJE WIELOWĄTKOWE W OBLICZENIACH
ELEKTROMAGNETYCZNYCH I OPTYMALIZACYJNYCH
UKŁADÓW ELEKTRYCZNYCH
Karol Bednarek, Leszek Kasprzyk, Andrzej Tomczewski
Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej
Wprowadzenie
W dobie ukształtowanej gospodarki rynkowej wytwarzane produkty muszą spełniać
w najlepszy sposób wiele różnego typu kryteriów oraz ograniczeń o charakterze technicznym
i ekonomicznym. Z jednej strony bardzo istotnym elementem jest oszczędność surowców
oraz energii w procesach produkcji i eksploatacji obiektów, z drugiej natomiast należy wziąć
również pod uwagę względy ekologiczne, trwałość, niezawodność oraz bezpieczeństwo
użytkowania urządzeń i systemów czy efekty estetyczne, równomierność rozkładu wielkości
fizycznych itp. Projektowanie układów elektrycznych przy uwzględnieniu wymienionych
wymagań wiąże się z prawidłowością realizacji obliczeń elektromagnetycznych, a w wielu
przypadkach również z właściwym przeprowadzeniem procesu wielowymiarowej
optymalizacji ich konstrukcji. Aparat matematyczny zarówno w przypadku obliczeń
elektromagnetycznych, jak i optymalizacyjnych staje się coraz bardziej rozbudowany
i skomplikowany. Wydłuża się przez to czas ich trwania. Pomocnym w takich przypadkach
było zastosowanie obliczeń równoległych, a w najnowszych generacjach komputerów
osobistych jest wykorzystanie wielordzeniowych jednostek przetwarzających (procesorów)
i realizacja obliczeń z zastosowaniem aplikacji wielowątkowych.
Wielowątkowość jako element zrównoleglenia obliczeń
Podstawowym kierunkiem działań w zakresie podwyższania mocy obliczeniowej
współczesnych komputerów jest jednoczesne stosowanie mechanizmu wielowątkowości i
wielordzeniowej konstrukcji procesorów. Pełne wykorzystanie możliwości systemów
wielordzeniowych klasy PC wymaga zastosowania zaawansowanych technik programowania
i związanych z nimi specjalistycznych bibliotek. Jedną z technologii programistycznych
udostępniających wymienione elementy jest platforma .NET, której integralną częścią jest
biblioteka TPL (ang. Task Parallel Library). Zawiera ona rozwiązania umożliwiające
wykorzystanie architektury wielordzeniowej procesora w zakresie zrównoleglenia procedur
obliczeniowych oraz procedur obsługi baz danych. Z jej zastosowaniem można efektywnie
wykorzystać moc współczesnych procesorów posiadających od 2 do 6 rdzeni i obsługujących
co najmniej dwa wątki na każdym z nich. Programowa ingerencja w proces rozdzielania
zadań obliczeniowych przypisanych poszczególnym rdzeniom i ich wątkom pozwala
efektywniej zarządzać wykorzystaniem mocy jednostek przetwarzających, w porównaniu z
rozdziałem automatycznym, realizowanym przez system operacyjny.
Najpowszechniej stosowaną techniką wykorzystania procesorów wielordzeniowych jest
tworzenie i obsługa wielu wątków (klasa Theard) oraz sterowanie ich przebiegiem z
zastosowaniem tzw. semaforów (obiekty klasy Semaphor). Poprzez czasowe blokowanie
34
XXI Sympozjum PTZE, Lubliniec 2011
dostępu do wybranych obiektów (mechanizmy zamka) możliwa jest realizacja algorytmów z
elementami synchronizacji wątków. Obniżenie efektywności wymienionej metody związane
jest z narzutami czasowymi wynikającymi z tworzenia wymienionych struktur w pamięci
operacyjnej. W przypadku zadań, dla których nie jest istotna kolejność realizacji wątków,
klasa Parallel udostępnia wersje zrównoleglonych pętli typu for i foreach
prowadzących do równomiernego obciążenia wszystkich rdzeni procesora, bez możliwości
sterowania kolejnością wykonywanych iteracji.
Obliczenia elektromagnetyczne i optymalizacyjne torów wielkoprądowych
Analizy optymalizacyjne torów wielkoprądowych (szynoprzewodów elektroenergetycznych),
a szczególnie wyznaczanie wartości wielkości ograniczających (temperatury, siły
elektrodynamiczne, naprężenia elektryczne, straty mocy) włączonych do funkcji kryterialnej
związane są z realizacją obliczeń elektromagnetycznych. Ponieważ parametrami
najintensywniej wpływającymi na kształtowanie konstrukcji szynoprzewodów są straty mocy
i czynniki cieplne, zatem podstawą obliczeń elektromagnetycznych jest wyznaczanie rozkładu
gęstości prądu w przewodach fazowych i ich osłonie. Wykorzystano w tym celu metodę
równań całkowych, a układ równań Fredholma na rozkład gęstości prądu w przewodach ma
postać:
J(r,) J(rO ,O )
3
jωO γC J(r',')K(r',',r,) K(r',',rO ,O ) dr' d' 0
4π
S
J(r',')r' dr' d' I
S
(1)
(2)
gdzie: I – natężenie prądu w przewodzie fazowym, c – konduktywność materiału przewodu,
(ro ,o ) – punkt odniesienia, K(r',',r,) – jądro równania całkowego. Analogiczną zależność
zapisuje się dla osłony. Po rozwiązaniu tych równań uzyskuje się rozkład gęstości prądu w
przewodach i ich osłonie, a na tej podstawie wyznaczane są w dalszych procedurach straty
mocy czynnej, temperatury przewodów i osłony oraz siły elektrodynamiczne działające w
stanie ustalonym i stanie zwarcia. Realizowane są ponadto analizy wytrzymałości
elektrycznej w układzie. Aparat matematyczny tych obliczeń oraz współczynniki występujące
w zależnościach przedstawiono w pracach [1,3,4]. Jako metodę optymalizacyjną zastosowano
algorytm genetyczny, dzięki czemu w przypadku funkcji wielomodalnych algorytm nie utyka
w optimum lokalnym, lecz uzyskuje się optimum w sensie globalnym. Zrównoleglenie
obliczeń optymalizacyjnych polega na rozdziale zadań obliczania funkcji przystosowania dla
poszczególnych osobników w danym pokoleniu na poszczególne rdzenie procesora i
uruchamiane na nich wątki.
Obliczenia rozkładu strumienia świetlnego i optymalizacja złożonych
systemów oświetleniowych
Realizacja zadań obliczeniowych związanych z analizą pola świetlnego w obiektach
wnętrzowych wymaga wyznaczenia rozkładu strumienia świetlnego. Do rozwiązania tego
typu zadań można wykorzystać metodę równań Fredholma, uwzględniającą zjawisko
wielokrotnych odbić. Zakłada się wówczas, że analizowane wnętrze jest fragmentem
35
XXI Sympozjum PTZE, Lubliniec 2011
przestrzeni otoczonej powierzchnią S ograniczającą rozchodzenie się strumienia
świetlnego. Strumień świetlny padający na powierzchnię bezpośrednio ze źródeł światła ulega
wielokrotnemu odbiciu, na skutek czego całkowita jego wartość na dowolnej powierzchni
analizowanego obiektu jest równa sumie składowej bezpośredniej ’ i pośredniej ‖.
Składową pośrednią wyznaczyć można wykorzystując definicję współczynnika sprzężenia f
dla poszczególnych powierzchni elementarnych analizowanego obiektu. Uwzględniając
wszystkie elementy dyskretne, zapisać można układ równań liniowych, w którym
niewiadomymi są całkowite wartości strumienia świetlnego:
ρ 2 f 21 ρ 2 f 2N
1 ρ1f1N
ρ f ρ f
1 ρ 2 f 2N
1 12 1 1N
...
...
1- ρ2
1 - ρ1
.. ρ N f N1 1 Φ1 Φ1' Φ 'N
.. ρ N f N2 1 Φ 2 Φ '2 Φ 'N
..
... ... ...
.. 1 - ρ N Φ N Φ src
(3)
gdzie: i - współczynnik odbicia i-tego elementu powierzchni, fki - współczynnik
wykorzystania i-tego i k-tego elementu powierzchniowego, ’i – składowa bezpośrednia
strumienia świetlnego na i-tej powierzchni elementarnej src – całkowity strumień świetlny
źródeł światła w analizowanym obiekcie. Szczegóły dotyczące powyższego modelu
matematycznego przedstawiono w pracach [2,3].
Podstawowym celem optymalizacji złożonych systemów oświetleniowych jest wyznaczenie
konfiguracji sprzętu oświetleniowego minimalizującej wskaźnik jakości o charakterze
ekonomicznym, przy jednoczesnym spełnieniu zbioru ograniczeń o charakterze technicznym
(głównie normatywnym). Ze względu na dużą liczbę zmiennych decyzyjnych, występowanie
ekstremów lokalnych, rozbudowany zbiór ograniczeń oraz postać funkcji przystosowania o
wysokiej złożoności obliczeniowej wymienione zadanie zrealizowano z wykorzystaniem
metody algorytmu genetycznego. Najbardziej czasochłonnymi obliczeniami wymienionego
zadania optymalizacyjnego jest wyznaczenie wartości przystosowania osobników oraz
ustalenie członów kar dla poszczególnych zmiennych decyzyjnych. Z tego powodu wskazane
jest wykonanie rozproszenia zadań, przydzielając obliczenia poszczególnych osobników do
niezależnych procesów.
Wyniki obliczeń
Na podstawie analizy przedstawionych w niniejszej pracy zadań obliczeniowych
wykorzystujących analizę pola elektromagnetycznego, przygotowano i zaimplementowano
przykładowe zadanie testowe obejmujące optymalizację systemu oświetleniowego. Realizacja
zadania wymaga przeprowadzenia analizy pola elektromagnetycznego z zakresu widzialnego
przy wyznaczaniu wartości przyjętej funkcji celu o charakterze ekonomicznym. Zadanie
zrealizowano na czterordzeniowym komputerze klasy PC z procesorem i7–950, 3.06 GHz,
6 GB RAM z zainstalowaną platformą .NET w wersji 4.0. Rozproszeniem elementów
optymalizacji wykorzystującej algorytm genetyczny objęto wyznaczanie wartości funkcji
przystosowania osobników w kolejnych pokoleniach. Dokonano porównania efektywności
zrównoleglenia obliczeń zrealizowanych trzema metodami: z zastosowaniem wątków, pętli
równoległych Parallel.For lub Parallel.ForEach. Na rysunku 1 przedstawiono zależność
uzyskanego przyspieszenia w funkcji wielkości zadania obliczeniowego.
36
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 1. Wartość przyspieszenia w funkcji wielkości zadania obliczeniowego
Przedstawiono również analizę charakterystyki obciążenia rdzeni i ich wątków w przypadku
uruchomienia algorytmu w wersji sekwencyjnej i zrównoleglonej (z zastosowaniem wątków).
Uzyskane wyniki przedstawiono na rysunku 2.
b) obliczenia zrównoleglone (wątki)
a) obliczenia sekwencyjne
Rys. 2. Charakterystyka obciążenia procesora
Uwagi i wnioski
Właściwe uwzględnienie oddziaływań elektromagnetycznych w urządzeniach i układach
elektrycznych umożliwia prawidłowe określenie zależności w nich występujących
i opracowanie systemów optymalnych ze względów technicznych i ekonomicznych.
Wykorzystując techniki programowe udostępnione w bibliotece TPL platformy .NET
możliwe jest skrócenie czasu analizy optymalizacyjnej przy zastosowaniu metody algorytmu
genetycznego, realizowanej na komputerach wielordzeniowych klasy PC.
Ze względu na udostępnianą w procesorach wielowątkowość rdzeni uzyskiwane
przyspieszenia mogą być wyższe od liczby procesorów. Dla zadania testowego
zrealizowanego na procesorze czterordzeniowego i7-950, uzyskano przyspieszenie
przekraczające wartość 4. Wykazano także, że wartość przyspieszenia obliczeń uzależniona
37
XXI Sympozjum PTZE, Lubliniec 2011
jest od wielkości zadania (rys. 1). W zaprezentowanym przykładzie dziesięciokrotny wzrost
złożoności obliczeniowej zadania powoduje przyrost przyspieszenia o 24%.
Literatura
[1] Kasprzyk L., Tomczewski A., Bednarek K., Efektywność oraz aspekty ekonomiczne w obliczeniach
elektromagnetycznych i optymalizacyjnych układów elektrycznych, Przegląd Elektrotechniczny, nr 12,
2010, s. 57-60.
[2] L. Kasprzyk, R. Nawrowski, A. Tomczewski, Application of a Parallel Virtual Machine for the Analysis of
a Luminous Field, Proc. EuroPVMMPI 2002, Vol. 2474, Springer-Verlang Berlin – Heilderberg – New
York 2002, pp. 122-129.
[3] Kasprzyk L., Bednarek K.: Speeding up of electromagnetic and optimization calculations by the use of the
parallel algorithms, Electrical Review, No 12, 2009, p. 65-68.
[4] K. Bednarek, Parametry cieplne w trójfazowych torach wielkoprądowych, Przegląd Elektrotechniczny,
nr 12, 2005, s. 106-108.
38
XXI Sympozjum PTZE, Lubliniec 2011
BADANIA ELEKTROMAGNETYCZNYCH ODDZIAŁYWAŃ
URZĄDZEŃ SILNOPRĄDOWYCH
Karol Bednarek
Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej
Wprowadzenie
Pole elektromagnetyczne (PEM) towarzyszy funkcjonowaniu wszelkich urządzeń
elektrycznych, a związane jest z nagromadzeniem bądź ruchem ładunków elektrycznych,
czyli występowaniem napięcia oraz przepływem prądu. W części przypadków wytwarzane
jest świadomie, w celu uzyskania określonych efektów użytkowych takich jak przesył
informacji, radiolokacja, w medycynie działania diagnostyczne bądź terapeutyczne itp. W
wielu jednak sytuacjach powstaje niezamierzenie, jako skutek uboczny funkcjonowania
urządzeń elektrycznych. Szczególnym, a jednocześnie stosunkowo powszechnie
występującym, przypadkiem są PEM generowane przez urządzenia silnoprądowe, związane
z wytwarzaniem, przesyłem i przetwarzaniem energii elektrycznej. Są polami
wolnozmiennymi, a zatem rozpatruje się je jako oddziaływania w strefie bliskiej (indukcji).
Odrębnie analizowane są wówczas składowa magnetyczna i elektryczna pola
elektromagnetycznego. Pewne problemy mogą pojawić się, jeśli w przestrzeni występowania
silnych pól elektrycznych bądź magnetycznych będą rozlokowani ludzie, usytuowane będą
urządzenia wrażliwe na takie oddziaływania albo będą występowały elementy z materiału
ferromagnetycznego [1-4].
W świetle przedstawionych zagadnień wyjątkowej wagi nabiera problematyka właściwej
identyfikacji oddziaływań tych pól. Szczególną uwagę należy zwrócić w takich przypadkach
na specyficzne obszary, gdzie oddziaływania są nietypowe, pola nakładają się i następuje ich
wzmocnienie, albo w układach skompensowanych na miejsca, w których kompensacja nie
występuje.
Opis analizowanych układów
Urządzeniami, w których generowane jest silne wolnozmienne pole magnetyczne są
elektroenergetyczne urządzenia silnoprądowe takie jak generatory, transformatory, urządzenia
rozdzielcze oraz przesyłowe, elektryczne obiekty hutnicze itp. Rozkłady pola magnetycznego
wokół tych urządzeń zależą od wartości przewodzonego prądu, ale także od miejsca
oddziaływania (odległości od źródła pola) oraz rozwiązania konstrukcyjnego układu.
Elementami systemu elektroenergetycznego, które najczęściej pojawiają się i oddziałują
elektromagnetycznie
na
otoczenie
są
tory
wielkoprądowe
(szynoprzewody
elektroenergetyczne), wśród których wyróżnia się następujące rozwiązania konstrukcyjne:
trójfazowe tory wielkoprądowe osłonięte; w rozwiązaniu tym wszystkie przewody
fazowe rozmieszczone są symetrycznie wewnątrz wspólnej cylindrycznej osłony,
czynnikiem izolującym jest najczęściej powietrze,
trójfazowe tory jednobiegunowe ekranowane (osłonięte); każdy przewód fazowy
umieszczony jest w indywidualnej osłonie, czynnikiem izolującym jest powietrze, SF6
lub mieszanina N2 oraz SF6,
39
XXI Sympozjum PTZE, Lubliniec 2011
trójfazowe tory wielkoprądowe pracujące w układzie płaskim (osłonięte lub
nieosłonięte); czynnikiem izolującym jest powietrze,
szynoprzewody w izolacji stałej (z żywic epoksydowych bądź z tworzyw sztucznych,
np. poliestrowej), pracujące w układzie płaskim,
tory wielkoprądowe pracujące w układzie bifilarnym; jest to rozwiązanie
sześcioprzewodowe, w którym w rozmieszczonych obok siebie przewodach płyną
prądy w przeciwnym kierunku (występuje silna kompensacja oddziałującego pola).
Przy pomiarach pola magnetycznego wokół tych urządzeń uwagę należy zwrócić szczególnie
na miejsca zagięć, rozgałęzień, punkty połączeń elektrycznych, miejsca braku bądź słabej
kompensacji pola, fragmenty urządzeń nieekranowane itp.
Wyniki pomiarów PEM w układach fizycznych
W celu zobrazowania różnic w oddziaływaniach elektromagnetycznych w różnych obszarach
wokół szynoprzewodów elektroenergetycznych dokonano pomiarów pola magnetycznego w
otoczeniu trójfazowego osłoniętego toru wielkoprądowego (przy prądzie fazowym I = 5 kA),
w którym występowało zagięcie pod kątem 90˚. Indukcję magnetyczną mierzono w trzech
obszarach: od wewnętrznej oraz zewnętrznej strony zagięcia szynoprzewodu i w środkowej
części odcinka prostoliniowego. Wyniki pomiarów zamieszczono na rys. 1.
B [ mT ]
0,800
Bs
Bzz
Bzw
0,600
0,400
0,200
0,000
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
l[m]
Rys. 1. Rozkłady indukcji magnetycznej w otoczeniu trójfazowych szynoprzewodów osłoniętych w układzie z
zagięciem toru
Bs – pomiary dla środkowej części toru, Bzw – pomiary w obszarze wewnętrznej części zagięcia szynoprzewodu,
Bzz – pomiary przy zewnętrznej części zagięcia toru
Z uzyskanych rezultatów wynika, że nietypowym obszarem oddziaływania pola jest zagięcie
toru. W rejonie wewnętrznej części zagięcia indukcja magnetyczna ma znacznie większe
wartości niż przy środkowym punkcie odcinka prostoliniowego, natomiast najmniejsze jej
wartości występują w obszarze zewnętrznym zagięcia toru.
Uwagi i wnioski
Najważniejszym czynnikiem, umożliwiającym wykrywanie i eliminację negatywnego
wpływu PEM na usytuowane w przestrzeni ich oddziaływania obiekty, jest znajomość
40
XXI Sympozjum PTZE, Lubliniec 2011
rozkładu pola w otoczeniu wytwarzającego dane pole źródła. Najlepszym sposobem na
wyznaczenie rozkładu pola wokół generującego je źródła jest przeprowadzenie pomiarów
wielkości charakteryzującej dane pole, czyli odpowiednio indukcji magnetycznej, natężenia
pola elektrycznego, a przy wysokich częstotliwościach gęstości mocy promieniowania.
Bardzo istotnym elementem analizy oddziaływań elektromagnetycznych jest uwzględnienie
specyficznych obszarów, gdzie oddziaływania są nietypowe, a zatem powstające zagrożenia
mogą zostać niedostrzeżone, co w efekcie może prowadzić do powstania niepożądanych
skutków.
Literatura
[1] Bednarek K., Electromagnetic field generated by heavy-current equipment and its effects on the
environment, Electrical Review, No 12, 2010, p. 9-12.
[2] Bednarek K., Oddziaływania elektromagnetyczne torów wielkoprądowych, Przegląd Elektrotechniczny,
nr 12, 2003, s. 897-899.
[3] Bednarek K., Normative and legal conditions pertaining to the effects of electromagnetic fields on human
organism, Academic Journals, Electrical engineering, No 52, Poznan Uniwersity of Technology, Poznań
2006, s. 91-101.
[4] Turowski J., Elektrodynamika techniczna, WNT, Warszawa 1993.
41
XXI Sympozjum PTZE, Lubliniec 2011
AN INTEGRATED EXPOSURE SYSTEM
Paweł Bieńkowski, Hubert Trzaska
Wroclaw University of Technology
EM Environment Protection Lab.
Introduction
Standard work of a mobile communication personal terminal causes a field generation in three
frequency ranges, namely: HF carrier radiated by the device antenna, magnetic field static or
alternating, generated by wiring connecting device’s PA with its power source and wideband
noise generated by control system. All the radiations may affect an operator as a result of the
devices physical contact with one’s body. Unfortunately, in biomedical studies only presence
of HF radiation is taken into account while the others are neglected with no regard to wide
application of similar signals in electro- and magnetotherapy. All the radiations were
measured in different conditions and an exposure system that allows complete exposure of an
object under test is proposed.
Radiations
We will not to discuss radiation of the device antenna; however, we only remind two
phenomena that are usually forgotten:
In many cases a size of the device casing is not enough to play a role of a counterpoise
and the role must be even partly transferred to the operator’s body. The hand (lips)
current is of the same nature that these induced by EMF radiated by the antenna [1,2].
A presence of nonlinear properties of cell walls lead to the carrier wave envelope
detection and propagation of LF currents through the body.
Apart of the above there are in a terminal two important sources of radiation. These are:
A wiring connecting power amplifier of the device with a power source.
Radiation from processor & control system.
Notice: Contrary to HF, attenuated at the ―depth of penetration‖ LF currents induced in a part
of the body freely propagate through the whole body. In order to confirm the phenomenon
series of experiments were performed in set as shown in Fig.1. Results of measurements are
shown in Fig.2.
10.00
Vout
[mV]
1.00
Out
0.10
In
0.01
Fig.1. LF transmittance measurements
1k
1M
f [Hz]
1E+8 1G
Fig.2. Results of measurements
42
XXI Sympozjum PTZE, Lubliniec 2011
The LF fields, that of nature similar to the envelope of HF carrier, are generated, due to BiotSavart’s law, by wires connecting devices PA with its power source. Estimated values of the
current intensity for several types of handheld terminals are set-up in Table1[3].
Measured H-field and E-field spectrum, radiated by mobile phone, is shown in Fig. 3 and 4.
Normalized Amplitude
1
A
0
0
4000
8000
Hz 12000
Fig. 3 LF H-field spectrum
9kHz
50kHz
Fig. 4 LF-MF field spectrum
A time ago the EMF generated by video display terminals and computing devices were of
concern. The issue was abandonned while flat screens were developed and they replaced
cathode-ray technique. In the case of portable terminals the problem should be taken into
account till now, because the radiations appear close to the operator body, even with galvanic
coupling with the body. Presence of the both spectra (shown in Fig. 3 and 4) should not be
omitted in biomedical studies as they are located within range of natural and
well as within frequency range widely applied in electro- and magnetotheray that would
suggest their biological activity.
Proposed solution
In order to make it possible the bioeffects investigations due to presence of all the radiations
presented close to a portable terminal we would like to propose set similar to that shown in Fig.
5. The system allows an exposure to arbitrary selected combination of radiated field
components and, as a result, possible presence of synergetic or similar phenomena.The system
includes a pulse generator that replaces real terminal due to a possibility of its damage during
continous work with full power. Real terminal, controlled by a simulator, allows signals
proportional to wideband noise, even working with reduced output power. HF power, detected
envelope and wideband noise are fed trouhgt a sumator to a typical exposure set, e.g. a TEM
chamber.
43
XXI Sympozjum PTZE, Lubliniec 2011
HF pulse
Generator
Base Station
Simulator
Obiect under
EMF exposure
ML
LPF
TRX
ML
Fig. 5 Block diagram of an integrated exposure system
Summary
There are known from the literature differences in laboratory and epidemiological studies
regarded to possible bioeffects caused by mobile telephony. The authors suppose that the
difference may be a result of taking into account only HF radiation in laboratory studies while
an real operator is exposed to wide range of radiations. Thus: integrated exposure, although
more difficult in realization, should be applied instead the present sets. Proposed system
permits separate exposure to any of the radiation and to selected combination of all of them,
that leads to studies of possible synergetic effects
Acknowledgement
Presented analyses are a part of the research within frames of Polish Ministry of Science and
Higher Education grant Nr 1765/B/T02/2009/37, and 3923/B/T02/2010/38.
References
[1] H. Trzaska, Limitations in the SAR Use. Environmentalist. 2005 vol. 25, nr 2-4, s. 181-185
[2] P. Bieńkowski, H. Trzaska, Operator's body role in mobile radiotelephony. Radioelektronika 2002. 12th
International scientific conference, Bratislava, May 14-16, 2002. s. 226-229
[3] P. Bieńkowski, Pole elektromagnetyczne radiotelefonów doręcznych. Przegląd Elektrotechniczny. 12/2004
nr 12, s. 1231-1233
44
XXI Sympozjum PTZE, Lubliniec 2011
OPTYMALIZACJA ALGORYTMÓW WYZNACZANIA
CHARAKTERYSTYK METROLOGICZNYCH CZUJNIKÓW
POLA ELEKTROMAGNETYCZNEGO
Paweł Bieńkowski, Bartłomiej Zubrzak
Politechnika Wrocławska, Instytut Telekomunikacji, Teleinformatyki i Akustyki
Pracownia Ochrony Środowiska Elektromagnetycznego
Wstęp
Wyznaczanie charakterystyk metrologicznych (zwane także wzorcowaniem) czujników pola
elektromagnetycznego jest procesem długotrwałym, wymagającym szeregu pomiarów [1].
Istotną rolę odgrywa w nim czynnik ludzki, który sam w sobie stanowi dodatkowe źródło
niepewności mogące w znaczny sposób wpłynąć na wyniki wzorcowania. Automatyzacja tej
czasochłonnej procedury ma na celu skrócenie czasu jej realizacji, a także ograniczenie
wpływ człowieka jako źródła potencjalnych błędów pomiarowych. Realizuje się to przez
opracowanie odpowiednich algorytmów wzorcowania i oprogramowania realizującego te
algorytmy na stanowisku pola wzorcowego. Podstawowym zadaniem algorytmu jest
możliwie szybkie i dokładne ustalenie zadanej w procedurze wzorcowania wartości natężenia
PEM lub określonego sygnału wyjściowego czujnika.
1. Zasady wzorcowania czujników PEM
Według [2] wzorcowanie to „proces techniczny – zbiór operacji ustalających, w określonych
warunkach, relację między wartościami wielkości mierzonej wskazanymi przez przyrząd
pomiarowy (...) a odpowiednimi wartościami realizowanymi przez wzorce
jednostki miary”. W przypadku wzorcowania czujników PEM jako wzorzec
jednostki miary rozuRys. 1. Schemat stanowiska wzorcowego PEM z anteną tubową
miemy odpowiedni układ
ekspozycyjny, w obrębie którego występuje PEM o zadanych parametrach. Źródłem
podstawowych wytycznych dotyczących zagadnień związanych z kalibracją czujników PEM
przedstawionych w dalszej części pracy są [3], [4] i [5], a także doświadczenie autorów w tej
dziedzinie.
Rysunek 1 przedstawia schemat podstawowego stanowiska wzorcowego PEM
z anteną tubową. Generator mocy stanowi źródło sygnału harmonicznego, który jest
wzmacniany przez wzmacniacz i poprzez sprzęgacz doprowadzony do anteny tubowej.
Sprzęgacz służy do pomiaru mocy na wejściu anteny z uwzględnieniem strat na drodze
generator – antena wynikających ze strat przewodów oraz złączy. W uproszczeniu wyznaczenie
jednego punktu charakterystyki polega na ustaleniu PEM o zadanych parametrach oraz
wykonaniu pomiaru sygnału wyjściowego czujnika. Cały cykl powtarza się dwa razy w celu
eliminacji błędów grubych.
45
XXI Sympozjum PTZE, Lubliniec 2011
2. Algorytmy ustalania zadanych wartości w układzie ze sprzężeniem zwrotnym
Ze powodu tego, że parametry poszczególnych elementów toru sygnałowego generatorantena zależą od częstotliwości generowanego sygnału a także (zwłaszcza w zakresie bardzo
wysokich częstotliwości) od mechanicznej konfiguracji kabli łączących urządzenia,
powtarzalności tłumienia przełączników, zmian parametrów wzmacniaczy pod wpływem
temperatury itp. bardzo trudnym byłoby opracowanie gotowych, „sztywnych‖ nastaw
generatora, tak by na wejściu anteny uzyskiwać określone wartości.. W związku z
powyższym najlepszym rozwiązaniem jest dynamiczne ustalanie zadanej wartości z
wykorzystaniem sprzężenia zwrotnego między miernikiem mocy a generatorem. Zadaniem
każdego z algorytmów jest znalezienie wartości zadanej z dopuszczalną tolerancją
Przeprowadzone testy pokazały, że ze względu na stabilność poszczególnych elementów
zestawu oraz rozdzielczość nastaw trudno jest uzyskać w zakresie mikrofal tolerancję na
lepszą niż 1%, co w przypadku wzorcowania czujników PEM można uznać za wartość w
pełni akceptowalną. Poniżej przedstawione zostaną różne algorytmy opracowane i
przetestowane na potrzeby wzorcowania czujników PEM.
Algorytm liniowy – to najprostsza i najmniej efektywna koncepcja. Polega ona na
zwiększaniu wartości generowanego sygnału z określonym skokiem k do momentu, w którym
uzyskamy pożądaną wartość emitowanego pola. Na początku jego działania amplituda
generowanego sygnału równa jest minimalnej. Następuje pomiar sygnału na sprzęgaczu. Jeśli
zmierzona wartość mieści się w granicach tolerancji oczekiwanego poziomu, to proces jest
zakończony, w przeciwnym przypadku – następuje zwiększenie amplitudy generowanego
sygnału i procedura powtarza się.
Algorytm próbkujący – polega na wykonaniu kilku pomiarów kontrolnych, których
zadaniem jest zbadanie przyrostu sygnału na wejściu anteny przy określonym stałym skoku k
poziomu sygnału z generatora. Po zebraniu 4 próbek następuje przeliczenie, dla jakiej
wartości sygnału z generatora osiągnięta zostanie wartość najbliższa oczekiwanej przy
założeniu, że charakterystyka tłumienia całego toru jest liniowa (niezależna od amplitudy
generowanego przebiegu). Po podaniu tej wartości na wyjście generatora dokonuje się
sprawdzenia, czy uzyskany poziom odpowiada pożądanemu – jeśli nie, następuje dostrojenie
do wartości oczekiwanej metodą liniową.
Algorytm próbkujący z pamięcią – to wersja algorytmu próbkującego, wzbogacona
o informacje z rezultatów wcześniej wykonanych pomiarów. Założeniem dodatkowym jest
narastające uszeregowanie kolejnych punktów wyznaczanej charakterystyki (tj. 1,2,3,5,8,10
etc.). Pierwszy pomiar wykonywany jest tak samo, jak w przypadku algorytmu próbkującego,
jednak przy kolejnych pomiarach wykorzystywana jest informacja zwrotna w postaci
poziomu sygnału, który był wymagany do otrzymania pożądanego sygnału w pomiarze
poprzedniej wartości , jako poziom początkowy przy kolejnym uruchomieniu algorytmu.
Jako, że przy określaniu charakterystyk ciąg danych jest narastający (np. 1,2,3,5..), niemal
pewnym jest, że poziom wymagany przy kolejnym pomiarze będzie wyższy od poziomu
ustalonego w pomiarze bieżącym. Pozwala to na rozpoczęcie pomiaru przyrostowego według
algorytmu próbkującego znacznie bliżej wartości pożądanej, a tym samym lepsze
dopasowanie poziomu zadanego, co stanowi o przewadze tego algorytmu nad algorytmem
próbkującym.
46
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 2. Zestawienie czasu realizacji algorytmów w zależności od szukanej
wartości natężenia PEM (f = 10 GHz, metoda stałego wskazania)
Algorytm kwantujący – polega na rekurencyjnym podziale całego zakresu, jakim
dysponujemy, do momentu odnalezienia odpowiednio małego przedziału, który zostaje
szczegółowo przebadany przy użyciu algorytmu liniowego. Algorytm wyznacza wielkość
zakresu, z którego może podawać wartości na wyjście generatora. Dokonywany jest podział
na 4 podzakresy. Następuje próbkowanie ich granic i na tej podstawie w procesie decyzyjnym
stwierdzane jest, w którym podzakresie znajduje się wynik. Tym sposobem wytypowany
podzakres zostaje poddany podziałowi drogą rekurencji następuje podział do momentu, gdy
badany przedział będzie odpowiednio wąski (definiują to parametry algorytmu), by przebadać
go precyzyjnie metodą liniową zaprezentowaną w pierwszym z opisywanych algorytmów.
Algorytm kwantujący z pamięcią – to wersja poprzedniego algorytmu wzbogacona
o informacje z rezultatów wcześniej wykonanych pomiarów. Pierwszy pomiar wykonywany
jest tak samo, jak w przypadku algorytmu kwantującego, jednak przy kolejnych pomiarach
wykorzystane są wyniki wcześniejszych pomiarów – na ich podstawie ustalany jest początek
przedziału poddawanego kwantowaniu.
3. Test i porównanie algorytmów
Testowanie polegało na wykonaniu procedury dojścia do zadanych parametrów PEM dla różnych
scenariuszy wzorcowania. W trakcie trwania testu gromadzono statystyki pomiarowe w postaci
czasu wykonania algorytmu oraz ilości operacji potrzebnych do jego realizacji. Należy przez to
rozumieć wykonanie operacji porównania przy użyciu operatorów „=‖, „<‖ lub „>‖.
Na rys. 2 przedstawiono przykładowe, reprezentatywne wyniki pomiarów dla realizacji
wyznaczania liniowości czujnika (charakterystyki dynamicznej) dla stałej częstotliwości. Na
wykresie nie uwzględniono algorytmu liniowego, ponieważ czasy jego realizacji były o rząd
dłuższe niż algorytmów optymalizowanych. Analizując wszystkie zebrane dane można
ocenić osobliwe cechy poszczególnych rozwiązań oraz dokonać wzajemnego porównania ich
wydajności.
47
XXI Sympozjum PTZE, Lubliniec 2011
4. Podsumowanie
Dla realizacji wyznaczania parametrów metrologicznych czujników PEM opracowano szereg
algorytmów pozwalających na optymalizację procesu. Bardzo ciekawie wypada porównanie
czasu wzorcowania przy użyciu zaproponowanych algorytmów do wzorcowania w pełni
ręcznego, gdzie elementem sprzężenia zwrotnego jest osoba wykonująca wzorcowanie.
Okazuje się, że przy prostym wzorcowaniu człowiek uzyskuje przewagę na automatem, ale
przy dłuższej pracy nawet mniej wydajne algorytmy pozwalają na szybsze i pewniejsze
wykonanie wzorcowania na stanowisku zautomatyzowanym. Przeanalizowane wyniki testów
pozwalają wyciągnąć wniosek, że najlepszym z algorytmów okazał się algorytm kwantujący z
pamięcią. Czasy jego realizacji są najkrótsze i jest on najmniej wrażliwy na poziom
zadawanych wartości. Jednocześnie algorytm ten jest najbardziej zbliżony do naturalnego
algorytmu, jakim posługują się autorzy przy wzorcowniach ręcznych.
Opisane w pracy algorytmy i stanowisko pomiarowe, które je wykorzystuje są rozwijane
i wykorzystywane w bieżących wzorcowniach realizowanych w Laboratorium Wzorców
i Metrologii Pola Elektromagnetycznego.
Praca zrealizowana w ramach projektu: „Czujniki i sensory do pomiarów czynników stanowiących
zagrożenia w środowisku – modelowanie i monitoring zagrożeń” (Umowa o dofinansowanie nr
POIG.01.03.01-02-002/08-00)
Literatura
[1] P. Bieńkowski: Wybrane charakterystyki metrologiczne mierników PEM i metody ich wyznaczania.
W: Zastosowania elektromagnetyzmu w nowoczesnych technikach i informatyce: [XIX Sympozjum
Środowiskowe PTZE], Worliny 2009. s. 31-33
[2] International vocabulary of metrology — Basic and general concepts and associated terms (VIM), 2.39
(6.11), JCGM 200:2008
[3] Basic standard for the calculation and measurement of electromagnetic field strength and SAR related to
human exposure from radio base stations and fixed terminal stations and fixed terminal stations for wireless
telecommunication systems (110 MHz – 40 GHz), EN 50383, August 2002, p.26, 36
[4] IEEE 1309 Calibration of Electromagnetic Field Sensors and Probes, Excluding Antennas, from 9 kHz to
40 GHz
[5] PN-EN 50383:2002 - Obliczenia i pomiary intensywności pola elektromagnetycznego i swoistego tempa
pochłaniania energii związanego z ekspozycją ludzi w polach elektromagnetycznych o częstotliwościach
od 110 MHz do 40 GHz, wytwarzanych przez radiowe stacje bazowe i stałe stacje końcowe
bezprzewodowych systemów telekomunikacyjnych. Norma podstawowa.
48
XXI Sympozjum PTZE, Lubliniec 2011
ŹRÓDŁA POLA ELEKTROMAGNETYCZNEGO
W ŻYCIU CODZIENNYM CZŁOWIEKA
Paweł Bieńkowski, Bartłomiej Zubrzak
Pracownia Ochrony Środowiska Elektromagnetycznego
Instytut Telekomunikacji, Teleinformatyki i Akustyki Politechnika Wrocławska
1. Wstęp
Wiek XX określany był mianem wieku pary i elektryczności, w wiek XXI weszliśmy z hasłem wieku
technik informatycznych. Wiąże się to z dynamicznym rozwojem przede wszystkim elektroniki oraz
pokrewnych gałęzi tej dziedziny, które powstawały wraz z jej rozwojem. W dość krótkim czasie
nastąpił ogromny postęp w technologii związanej z wytwarzaniem urządzeń elektronicznych i
teleinformatycznych, a łatwa dostępność i malejące ceny przesądziły o ich ogromnej popularności.
Obecnie ciężko wyobrazić sobie życie bez np. telewizji czy kuchni mikrofalowej, ale także bez pilota
do centralnego zamka w samochodzie. Elektroniczne gadżety na tyle zdominowały nasze życie, że już
praktycznie nie zwracamy na nie uwagi, czasami tylko zastanawiając się nad poziomami pola
elektromagnetycznego (PEM) wytwarzanego przez te urządzenia. Przegląd źródeł PEM w środowisku
życia człowieka oraz wyniki pomiarów natężenia PEM w otoczeniu wybranych źródeł przedstawiono
w niniejszej pracy.
2. Źródła PEM w środowisku
Różnorodność źródeł i specyfika ich pracy powoduje, że do środowiska emitowane jest PEM o bardzo
szerokim widmie, poczynając od kilkunastu Hz, a kończąc na wysokich mikrofalach o częstotliwości
kilkudziesięciu GHz. Dla uporządkowania wykorzystania widma elektromagnetycznego, określono
pasma częstotliwości przeznaczone dla stosowania w różnych dziedzinach. Najszerszy zakres
częstotliwości przewidziano na potrzeby radiokomunikacji (co jest zrozumiałe), ale wydzielono
również tzw. pasma ISM (ang. Industrial, Scientific, Medical) przeznaczone dla zastosowań
gospodarczych, przemysłowych, medycznych i naukowych. Rys. 1 przedstawia umowny podział
widma elektromagnetycznego oraz reprezentatywne urządzenia będące źródłami PEM w
poszczególnych zakresach. Ograniczono się do urządzeń stosowanych w gospodarstwach domowych
oraz życiu codziennym, całkowicie pomijając urządzenia medyczne, przemysłowe i profesjonalne
systemy radiokomunikacyjne, w tym telefonię komórkową, ponieważ te źródła nie są przedmiotem
niniejszego opracowania.
Chronologicznie najwcześniej pojawiły się źródła związane z elektroenergetyką. W tym zakresie
dominuje składowa magnetyczna PEM o częstotliwości 50 Hz i jej harmoniczne. Podstawowym
źródłem pola są transformatory zasilające różne urządzenia. Analizując pole rozproszone od
transformatorów, można zauważyć pewną pozytywną prawidłowość: im transformator jest większej
mocy, tym jego konstrukcja minimalizuje pole rozproszone. Wynika to z chęci ograniczenia strat, a
przy okazji ogranicza się emisje PEM do środowiska. Wraz z rozwojem techniki impulsowej, w latach
80-tych XX wieku rozpoczęło się zastępowanie zasilaczy transformatorowych zasilaczami
impulsowymi. Początkowo zasilacze impulsowe pracowały z częstotliwościami przełączania ok. 20
kHz, obecnie częstotliwość ta wzrosła nawet do kilkuset kiloherców. Zastosowanie wyższych
częstotliwości pracy pozwoliło na zmniejszenie wielkości transformatorów, co zmniejszyło pole
rozproszone, a konieczność spełnienia wymagań kompatybilności elektromagnetycznej dodatkowo
przyczyniła się do ograniczenia emisji PEM. Efektem rozpowszechnienia techniki impulsowej jest
49
XXI Sympozjum PTZE, Lubliniec 2011
również pojawienie się tzw. świetlówek energooszczędnych, w otoczeniu których dominuje składowa
elektryczna PEM z zakresu VLF.
Rys. 1. Podział widma elektromagnetycznego wraz z przykładowymi urządzeniami pracującymi
w poszczególnych pasmach
Kolejną dziedziną, w której energia elektromagnetyczna odgrywa coraz większą rolę, jest
„grzejnictwo kuchenne‖. Popularne niegdyś kuchenki elektryczne zastąpiły ceramiczne płyty grzejne,
ale zasada pracy pozostała niezmieniona – oparta na grzałce oporowej. Pod koniec lat 90-tych do
kuchni wkroczyły kuchenki mikrofalowe pracujące w paśmie 2,45 GHz, a ostatnie lata to coraz
większy wzrost popularności kuchenek indukcyjnych. W tym przypadku pasmo pracy zawiera się
między 20 a 80 kHz.
Odbiorniki telewizyjne oraz monitory ekranowe to grupa urządzeń, której rozwój pod kątem redukcji
emisji pola elektromagnetycznego poszedł dwutorowo: w przypadku monitorów komputerowych już
pod koniec lat 80-tych wprowadzono ostre normy pod ogólnym hasłem „low radiation‖ [1,2] i ze
względów komercyjnych bardzo szybko większość monitorów dostępnych na rynku normy te
spełniało. Odbiorniki telewizyjne tym normom nie podlegają, co widać w wynikach pomiarów
telewizorów. Podstawowym źródłem PEM w telewizorach i monitorach jest układ odchylania
poziomego o częstotliwości podstawowej od 15,5 kHz dla odbiorników telewizyjnych do ponad 100
kHz dla monitorów komputerowych. Problem ostatecznie rozwiązało wprowadzenie na rynek
monitorów i telewizorów LCD, w otoczeniu których natężenia PEM jest znacznie mniejsze niż dla
odbiorników kineskopowych.
W paśmie radiofal i mikrofal w powszechnym użyciu dominują dwa rodzaje urządzeń: analogowe
telefony bezprzewodowe starszej generacji lub nowsze cyfrowe pracujące w standardzie DECT oraz
radiotelefony - popularnie określane mianem „walkie-talkie”. Najnowsze mikrofalowe źródła PEM
związane są z systemami transmisji danych. Stanowią je lokalne bezprzewodowe sieci komputerowe
w standardzie Wi-Fi oraz system Bluetooth zastępujący coraz częściej kable połączeniowe między
różnymi urządzeniami, np. pomiędzy telefonem komórkowym a słuchawką bezprzewodową. Zmiany
w technologiach stosowanych w telefonii komórkowej pozwoliły operatorom na oferowanie dostępu
do Internetu przez sieć GSM/UMTS i rozwiązanie to, zwłaszcza ze względu no wygodę użytkowania,
zyskuje na popularności, a modem radiowy przyłączony do komputera staje się kolejnym źródłem
PEM w gospodarstwie domowym.
Osobną klasą urządzeń są elektroniczne systemy antykradzieżowe (EAS – Electronic Article
Surveillance) powszechnie stosowane w większości sklepów. Wykorzystują rozmaite rozwiązania i
pracują w różnych zakresach częstotliwości. Bez względu na użytą technologię, ich budowa pozostaje
niezmienna: bramka montowana przy wyjściu (np. sklepu) emitująca pole elektromagnetyczne oraz
specjalne transpondery mocowane na produktach, które umieszczone w polu bramki zmieniają jego
parametry, co prowadzi do detekcji i wywołania sygnału alarmowego.
50
XXI Sympozjum PTZE, Lubliniec 2011
3. Poziomy PEM w otoczeniu wybranych źródeł
Wyniki pomiarów w otoczeniu niektórych źródeł PEM występujących w środowisku komunalnym
można znaleźć w literaturze [3,4,5,6]. Wyniki własnych pomiarów, zwłaszcza urządzeń, które
niedawno pojawiły się w powszechnym użyciu, przedstawiono w Tabeli 1. Wynikiem pomiaru jest
wartość skuteczna natężenia składowej elektrycznej E lub magnetycznej H pola elektromagnetycznego
odniesiona do całego cyklu pracy urządzenia. Pomiary wykonywano w takich warunkach pracy
urządzeń (zgodnych z instrukcją obsługi), aby uzyskać największą emisję PEM. Pomiar podstawowy
wykonywano w odległości 15 cm od obudowy urządzeń lub w odległości, przy której natężenie PEM
osiągało wartość dopuszczalną zgodnie z [8], pomiar uzupełniający w takiej odległości, przy której
natężenie pola osiągało wartość 0,25 A/m dla składowej magnetycznej z zakresu ELF oraz 1 V/m dla
zakresu radio- i mikrofal.
4. Podsumowanie
Dynamiczny rozwój techniki spowodował, że w środowisku komunalnym i gospodarstwach
domowych występuje ogromna liczba źródeł pola elektromagnetycznego. Generalnie, jak wynika z
literatury i z przedstawionych w niniejszej pracy przykładów, pole elektromagnetyczne w otoczeniu
tych urządzeń nie przekracza wartości dopuszczalnych polskimi przepisami dotyczącymi ochrony
środowiska. Należy jednak pamiętać o prawidłowej eksploatacji źródeł PEM. Na przykład
niewskazane jest uruchamianie pustej kuchenki mikrofalowej – w takim przypadku natężenie PEM w
jej otoczeniu może być nawet 4 razy większe niż przy pracy kuchenki choćby ze szklanką wody lub
innym wsadem. Działając zgodnie z zasadą ALARA (As Low As Reasonably Achievable) można
zalecić zwracanie uwagi na ograniczanie ekspozycji na PEM pochodzące od źródeł w gospodarstwie
domowym, np. zasilaczy transformatorowych nie umieszczać przy łóżku, bazę telefonu DECT
umieścić z dala od miejsc, gdzie się najczęściej przebywa, nie przyglądać się z bliska pracującej
kuchence mikrofalowej, jeżeli to możliwe, korzystać z przewodowych sieci komputerowych, nie
używać niehomologowanych i przerabianych urządzeń będących źródłami PEM.
Tabela 1. Wyniki pomiarów w otoczeniu wybranych źródeł PEM
Pasmo
Częstotliwość
Składowa PEM
Natężenie – odległość
od źródła
Zasilacz
ELF
50 Hz
H 2 A/m – 15 cm
transformatorowy małej
H 0,25 A/m – 35 cm
mocy – „wtyczkowy‖
Ceramiczna płyta
ELF
50 Hz
H 4-6 A/m – 15 cm nad polem grzejnym
grzejna
H <0,8 A/m – 15 cm przed płytą grzejną
Płyta grzejna indukcyjna
VLF
20 – 80 kHz
H 0,65 – 0,85 A/m – 15 cm nad polem grzejnym
(maleje ze
0,45 – 0,8 A/m – 15 cm przed płytą grzejną,
wzrostem
H małe i duże pole grzejne
mocy)
Telewizor z kineskopem
VLF
15,5 kHz
H 0,35 A/m -15 cm przed ekranem
29’
H 0,9 A/m – 15 cm nad obudową (nad cewkami
odchylania)
E 20-40 V/m – 15 cm przed ekranem
Telewizor LCD 32’
VLF
33 kHz
E < 10 V/m, H< 0,1 A/m w okolicy zasilacza
impulsowego
Świetlówka
VLF
22 – 45 kHz
H <0,02 A/m – 15 cm od obudowy
kompaktowa
E 20-30 V/m – 15 cm od obudowy
„energooszędna‖
Pilot zdalnego
Radiofale 27 MHz,
E 3-5 V/m – 15 cm od anteny
sterowania zabawek
40 MHz
Źródło
51
XXI Sympozjum PTZE, Lubliniec 2011
Źródło
Pasmo
Pilot od autoalarmu,
sterowania bramą itp.
Walkie – Talkie
(moc znamionowa 0,5
W)
Mikrofalowa czujka
ruchu, np. przy drzwiach
otwieranych
automatycznie
Telefon DECT
Mikrofale
Bluetooth
Mikrofale
Częstotliwość
315 MHz,
433 MHz
446 MHz
Mikrofale
0,86 GHz
lub
2,4 GHz
Mikrofale
1,9 GHz
Mikrofale
2,4 GHz
Składowa PEM
E
Natężenie – odległość
od źródła
0,4 – 1 V/m – 15 cm od obudowy
E
E
E
E
E
10 V/m – 15 cm od anteny
7 V/m – 20 cm od anteny
1 V/m – 130 cm od anteny
3 V/m – 15cm od czujki
1 V/m – 40 cm od czujki
E
E
E
E
1 V/m – 15cm od słuchawki
4 V/m – 15 cm od bazy telefonu
1 V/m – do 80 cm od bazy telefonu
< 0,8 V/m – 15 cm – transmisja danych
między telefonami komórkowymi
< 0,4 V/m – 15 cm od słuchawki
bezprzewodowej Bluetooth telefonu
komórkowego
4 V/m – 15 cm od obudowy laptopa,
1V/m - wartość maksymalna wzdłuż osi ciała
osoby korzystającej z laptopa
5 V/m – 15 cm od anteny domowego routera
Wi-Fi
1 V/m – 50-70cm od anteny domowego
routera Wi-Fi
5-10 V/m – 15 cm od obudowy kuchenki
1 V/m – do 170 cm od obudowy kuchenki
56 A/m – 15 cm od obudowy kuchenki
0,25 A/m – do 150 cm od obudowy kuchenki
E
Wi-Fi
Mikrofale
2,4 GHz
E
E
E
E
Kuchenka mikrofalowa
(z wsadem 0,5 litra
wody)
Mikrofale
2,45 GHz
E
E
H
H
ELF
Literatura
[1]
[2]
[3]
[4]
[5]
[6]
[7]
MPR National Board for Measurement and Testing, Sweden. Report MPR 1990:8, Test methods for Visual Display
Units 1990.12.10, MPR 1990:10, Users Handbook for Evaluating Visual Dispray Units, 1990.12.31
TCO’99 Certification – TCO The Swedish Confederation of Professional Employees. Report No. 1. Requirements and
test methods for environmental labeling of displays (CRTA); Report No. 2. Requirements and test methods for
environmental labeling of display (flat), Stockholm, 20.07.1998.
P. Mamrot, M. Zmyslony, P. Politanski, H. Aniołczyk, Ocena bezpieczeństwa zabawek - ze szczególnym
uwzględnieniem bezpieczeństwa elektromagnetycznego - w świetle obowiązujących przepisów - badania wstępne. MP,
2005; 56(1):19-24
H. Aniołczyk (red.), Pola elektromagnetyczne: źródła - oddziaływanie - ochrona, IMP im. prof. J. Nofera, Łódź, 2000
K. Gryz, J. Karpowicz, Pola elektromagnetyczne w środowisku pracy. Seria Zarządzanie bezpieczeństwem i higieną
pracy. Red. nauk. D. Koradecka, Warszawa, CIOP 2000
S. Marzec, Pole elektromagnetyczne elektrycznych źródeł światła – Warsztaty IMP, Łódź 2010
Rozporządzenie Ministra Środowiska z 30.10.2003 r. w sprawie dopuszczalnych poziomów pól elektromagnetycznych
w środowisku oraz sposobów sprawdzania dotrzymania tych poziomów (Dz.U. z 2003 Nr 192, poz. 1883)
52
XXI Sympozjum PTZE, Lubliniec 2011
THE INDIRECT SUPPRESSIVE EFFECT
OF THE ELECTROMAGNETIC FIELD (EMF)
ON ANALGESIC EFFECT OF THE OPIOID DRUG
(TRAMADOL)
Paweł Bodera1, Bożena Antkowiak1, Wanda Stankiewicz1, Jarosław Kieliszek1,
Jaromir Sobiech1, Andrzej Krawczyk2, Andrzej Wojdas3
1
Wojskowy Instytut Higieny i Epidemiologii
Politechnika Częstochowska, Wydział Elektryczny
3
Wojskowy Instytut Medyczny, Klinika Otolaryngologii,
2
Streszczenie. Celem pracy doświadczalnej było przedstawienie nowego modelu badawczego służącego do oceny
modyfikacji działania opioidowego leku przeciwbólowego (tramadol) pod wpływem czynnika fizycznego, jakim
jest pole elektromagnetyczne. Mechanizm działania zastosowanego leku polega na powinowactwie do receptora
opioidowego μ oraz pośrednim oddziaływaniu na kanały jonowe np. wapniowe.
Abstract. Our research work is dedicated to describing a new investigational model concerning the influence of a
physical factor (electromagnetic field) on the mode of action of analgesic opioid drug (tramadol). The used drug
has affinity to mu-opioid receptors, by the indirect influence on some ion receptors eg. Calcium channels.
Keywords: electromagnetic field, calcium channels, inflammation, pain perception, tramadol
Słowa kluczowe: pole elektromagnetyczne, kanały wapniowe, stan zapalny, odczuwanie bólu, tramadol
Introduction
It is well known that a biological system exposed to a physical stimulus is able to detect its
presence and to modify its own biological activity depending on the characteristics of the
applied stimulus such as mechanic, electric or magnetic. From a physical point of view, EMFs
can be classified according to their frequency/ wavelength along the spectrum of
electromagnetic radiation. Despite growing and consistent evidence some form of
magnetotherapy may be effective in treating pain [1].
There is no assertion in the available literature that the RF electromagnetic field can directly
influence the molecular equilibrium among ionotropic transmembrane receptors.
The understanding of cytokine action on neuronal excitability in pain processing is currently
still emerging. Our understanding of this issue is that the external influence on ion channels
(EMF) would be reflected by an elevated cytokine level, which could be easily investigated in
an irradiated rats model, where the inflammation is artificially generated (CFA). We take into
account that cytokine action on neuronal excitability depends on their action on ion channels.
Cytokine action can be acute, by modulation of posttranslational modification and immediate
activity of ion channels subunits or sustained, by modulation of expression of specific genes.
Being aware that cytokines regulate the acute and long-term changes in voltage-gated and
ligand-gated ion channels, we would like to posit a new idea that there is a feedback between
these cytokines and the subunits of ion channels.
53
XXI Sympozjum PTZE, Lubliniec 2011
Material and Methods
Animals
Experiments were performed on male Wistar rats weighing 220-250g purchased from Center
of Experimental Medicine (Medical University of Bialystok, Poland). Animals were housed
in cages on a standard 12:12 h light/dark cycle. Water and food were available ad libitum
until rats were transported to the laboratory approximately 1 h before experiments.
All behavioral testing was performed between 9:00 am and 4:00 pm and the animals were
used only once. Animal care and handling procedures were in accordance with the guidelines
of the International Association for the Study of Pain (IASP) on the use of animals in pain
research and the protocol was approved by the IV Local Ethics Committee for Animal
Experimentation in Warsaw.
Thermal nociception
Assessment of thermal nociception was performed using plantar test by Hargreaves method
(Hargreaves et al., 1988). To measure paw withdrawal response to noxious heat stimuli, each
animal was placed in a Plexiglas chamber on a glass plate located above a light box. Radiant
heat from a Model 336 Analgesia Meter (IITC, Inc./Life Science Instruments, Woodland
Hills, CA, USA) was applied by aiming a beam of light through a hole in the light box
through the glass plate to the middle of the plantar surface of each hind paw [2].
When the animal lifted its foot, the light beam was turned off. The length of time between the
start of the light beam and the foot lift was defined as the paw withdrawal latency (PWL).
Each trial was repeated 2 times at 5-min intervals for each paw. A cut-off time of 20 s was
used to avoid paw tissue damage.
Drugs
Complete Freund’s Adjuvant (CFA; heat killed Mycobacterium tuberculosis suspended in
paraffin oil, 1 mg/ml) was purchased from Sigma-Aldrich. Tramdol hydrochloride (Tramal,
Grünenthal, Germany) was used in the form of injectable solution in aqua pro injectione.
Tramadol is an analgesic drug that is used broadly worldwide, but its mechanisms of action
have not been fully elucidated [3].
Experimental procedures
Rats were exposed in pairs at the frequency of 1500 MHz and field strength of 90 V/m. The
propagation vector of the incident wave was parallel to the long axis of the animal’s body.
Each pair was given 15 minutes exposure. The same number of rats were sham-exposed with
no voltage applied to the field generator.
In order to assess the influence of electromagnetic field (EMF) exposure on pain threshold to
thermal stimulus and thermal hyperalgesia, PWLs were measured in control saline-treated
animals and after inflammatory state induction (n=10). Persistent inflammation was elicited
with CFA injected into the plantar surface of the left hind paw in 0.1 ml volume 24 hours
before testing. EMF in 1.5 and GHz frequency and 90V/m intensity was applied once for 15
minutes. During particular EMF exposure two rats were placed in Plexiglas enclosures
positioned centrally, 1 meter from the EMF source. Immediately before EMF exposure rats
were inraperitoneally injected with tramadol (TRAM) in the 20 mg/kg dose or vehicle in the 1
ml/kg volume. Left PWLs to thermal stimulus were measured 30 and 60 minutes after TRAM
injection.
54
XXI Sympozjum PTZE, Lubliniec 2011
Fig. 1. Paw withdrawal latency to thermal stimulus in control group (control) and with paw inflammation
(CFA), after 30 and 60 minutes after tramadol injection in 20mg/kg dose (CFA+TRAM), before and after
electromagnetic field exposure (CFA+EMF) alone or together with tramadol injection (CFA+TRAM+EMF).
Results
PWLs in healthy rats
EMF exposure did not markedly influence nociceptive threshold to thermal stimulus in
healthy animals. Although antinociceptive effect at 30 min of TRAM injection was reduced,
there was no significant difference in PWLs between TRAM treated rats with and without
EMF exposure (Fig. 1).
PWLs in rats with paw inflammation
CFA injection elicited thermal hyperalgesia and PWLs reduction by 47,4 (p<0.001) and 41%
(p<0.001) in the first and second measurement, respectiely. EMF exposure did not influence
PWLs in rats with paw inflammation. Application of TRAM induced marked antihyperalgesic
effect. PWLs in both measurements did not significantly differ from basic results and those
from control group.
55
XXI Sympozjum PTZE, Lubliniec 2011
Statistics
Statistical calculations were designed to compare all investigated groups among themselves as
well as with the control group. R language and environment for statistical computing and
graphics was used to performing all presented calculations [4].
Conclusion
Electromagnetic field exposure in 1,5GHz frequency and 90V/m intensity did not markedly
influence nociceptive threshold to thermal stimuli both in normal and pathological state,
however it decreased efficacy of tramadol by shortening the duration of its antihyperalgesic
action in conditions of tissue inflammation.
References
[1] Wolsko P.M., Eisenberg D.M., Simon L.S., Davis R.B., Walleczek J., Mayo-Smith M., Kaptchuk T.J.,
Phillips R.S. Double-blind placebo-controlled trial of static magnets for the treatment of osteoarthritis of
the knee: results of a pilot study. Altern Ther Health Med 2004;10: 36–43.
[2] Hargreaves K, Dubner R, Brown F, Flores C, Joris J. A new and sensitive method for measuring thermal
nociception in cutaneous hyperalgesia. Pain.1988; 32:77–88.
[3] Minami K., Uezono Y., Ueta Y. Pharmacological Aspects of the Effects of Tramadol on G-Protein Coupled
Receptors, Journal of Pharmacological Sciences. 2007; 103, 3,253-260
[4] R: language and environment for statistical computing and graphics. http://www.r-project.org/
56
XXI Sympozjum PTZE, Lubliniec 2011
ODKSZTAŁCENIE WSADÓW RUROWYCH WYBRANYCH
MATERIAŁÓW W PROCESIE ELEKTRODYNAMICZNEGO
FORMOWANIA METALI
Borys Borowik
Politechnika Częstochowska, Instytut Technologii Maszyn i Automatyzacji Produkcji
Wstęp
W przypadku kształtowania przewodzącego wsadu rurowego impulsowe pole magnetyczne
jest polem zewnętrznym w stosunku do rury ma jedną składową wzdłuż osi z
H zew ( t ) 1z H zzew ( t ) , w którym składowa natężenia pola magnetycznego wzdłuż osi z
H zzew ( t ) H 0 e t sin( t ) 1( t )
(1)
Przy kształtowaniu metali impulsowym polem magnetycznym i liczeniu odkształcenia
zasadniczym problemem jest wyznaczenie rozkładu czasowo – przestrzennego rozkładu
natężenia pola magnetycznego HIII(r,t) w kształtowanym elemencie[1,2].
Odkształcenie
Po wyznaczeniu pola magnetycznego i ciśnienia[3-9], odkształcenie x liczone od powierzchni
wsadu do jego środka wyraża się wzorem p0 e 2 t sin 2 t d x( t ) p p , gdzie
x( t )
pp
p0
[ e 2 t sin 2 t
]
d
p0
(2)
Stąd prędkośc odkształcenia
cos 2t sin 2t e 2 t
pp
xw ( t )
t
2
2
p
4 1 2
4 1 2 0
(3)
oraz odkształcenie
2
xw ( t )
2 2 4
3
1 cos2t 2
sin 2t
2 2 4
3
2
8 2
2
1
2
2
e 2 t
1 3
2
8 2
2
2
2
1
2
2
Względna gęstośc powierzchniowa energii wyraża się wzorem
57
2
4 1 2
t
1 pp 2 2
t (4)
2 p0
XXI Sympozjum PTZE, Lubliniec 2011
cos 2t sin 2t e 2 t
pp
ekw ( t )
t
p0
2
4 1 2
2
(5)
Przy określonej energii ek0 wyznaczy się tym samym energię ek(tR), która jest jednocześnie
energią kinetyczną po odkształceniu plastycznym 2R w kierunku promieniowym. Gdyby
wtedy układ wsad – matryca został pozbawiony matrycy, to energia ta spowodowałaby dalsze
odkształcanie wsadu o odkształcenie plastyczne 2r zgodnie ze wzorem
ek ( t R )
p d
Rsr
2r p p 2r , 2r
e k ( t R )
pp
(7)
Zatem odkształcenie całkowite w takim przypadku (formowanie swobodne) określone jest
następującym wzorem
x 2 R 2 r
(8).
Wnioski
Przyjmując następujące wartości wielkości startowych: odkształcenie plastyczne – 2ΔR =
2·10-3 m, grubość ścianki wsadu rurowego – d = 2·10-3 m, promień wewnętrzny wsadu
rurowego – R1 = 2·10-2 m, masa właściwa aluminium – ρ = 3·103 kg·m-3 ,naprężenie na
granicy plastyczności dla aluminium – ζp = 4,5·108 Pa, masa właściwa miedzi – ρ = 8,92·103
kg·m-3 ,naprężenie na granicy plastyczności dla miedzi – ζp = 0,57·108 Pa i zmieniając
wielkość pola magnetycznego i pulsacji otrzymujemy:
H0 [A·m-1]
1,5·107
1,8·107
1,2·107
1,5·107
1,5·107
Aluminium
ω [rad·s-1]
η [s-1]
4
5·10
5·103
4
5·10
5·103
5·104
5·103
4
8·10
5·103
4
10·10
5·103
Δx [m]
3,6·10-3
12,9·10-3
2,9·10-3
2,7·10-3
2,2·10-3
H0 [A·m-1]
1,4·107
1,2·107
107
1,4·107
1,4·107
Miedź
ω [rad·s-1]
η [s-1]
4
5·10
5·103
4
5·10
5·103
5·104
5·103
4
8·10
5·103
4
10·10
5·103
Δx [m]
29,3·10-3
17,5·10-3
8,6·10-3
18,3·10-3
14,9·10-3
Literatura
[1] Dobrogowski J., Kołaczkowski Z., Tychowski F., Tłoczenie metali impulsowym polem magnetycznym,
PWN, Warszawa Poznań 1979
[2] Batygin Y. V., Daehn. G. S., The pulse magnetic fields for progressive technologies. Ohio State
University., Kharkov – Columbus 1999
[3] Krakowski M., Elektrotechnika Teoretyczna Tom 2. pole elektromagnetyczne, PWN, Warszawa 1995
[4] Piątek Z., Power emited inside a conducting cylinder placed in longitudinal uniform transient magnetic
field, Acta Techn. CSAV, 2004 pp. 347-364
[5] Piątek Z., Borowik B., Electromagnetic field in a cylindrical conductor in the process of metal forming
using impulse magnetic field., XXVII IC SPETO, 2005 pp. 43-46
[6] Borowik B., Pole elektromagnetyczne, siły ponderomotoryczne, ciśnienie, energia i moc w rurowych
wsadach przewodzących w procesie kształtowania impulsowym polem magnetycznym, rozprawa
doktorska, Częstochowa 2006
[7] Tegopoulos J. A., Kriezis E. E,, Eddy Currents in Linear Conducting Media. Elsevier., New York 1985
58
XXI Sympozjum PTZE, Lubliniec 2011
[8] Osiowski J., Zarys rachunku operatorowego, WNT, Warszawa 1965
[9] McLachlan N., Funkcje Bessela dla inżynierów, PWN, Warszawa 1964
[10] Leroy M., Renaud J. Y.: Formage électromagnétique. Techniques de l’Ingénieur, Traité Mécanique et
Chaleur, B 7582 (0), 1980,
[11] Derski W., Podstawy teorii sprężystości. PWN, Warszawa 1964
59
XXI Sympozjum PTZE, Lubliniec 2011
ANALIZA METADANYCH OBRAZÓW MEDYCZNYCH
W DIAGNOSTYCZNYCH SYSTEMACH KOMPUTEROWYCH
Liliana Byczkowska-Lipińska, Agnieszka Wosiak
Politechnika Łódzka, Instytut Informatyki
Zastosowanie technologii informatycznych w medycynie znacząco wpłynęło na poprawę stanu opieki
zdrowotnej. Początkowo systemy informatyczne w służbie zdrowia stanowiły pomoc dla czynności
administracyjnych, dopiero w dalszej kolejności wdrażano systemy diagnostyczne. Obecnie, dzięki
środkom informatycznym, dokumentacja medyczna dotycząca pacjentów może być na bieżąco
dostępna wszystkim autoryzowanym użytkownikom w postaci systemów EMR (Electronic Medical
Record), EHR (Electronic Health Record) oraz PHR (Personal Health Record).
Specyficznym typem dokumentacji medycznej są obrazy medyczne pochodzące między innymi z
badań. tomograficznych (CT), rezonansu elektromagnetycznego (MRI) oraz ultrasonografii.
Pozyskanie informacji z obrazów medycznych może znacząco poprawić jakość diagnozy medycznej,
co sprawia, że implementacja funkcji związanych z obrazowaniem medycznym w komputerowych
systemach diagnostyki medycznej jest wskazana, a nawet konieczna. Gromadzenie i przechowywanie
obrazów z badań obecnie nie stanowi problemu przy zastosowaniu niemal dowolnego systemu
bazodanowego, jednak analiza tego typu informacji jest zagadnieniem złożonym, które wymaga
znacznie bardziej zaawansowanych technik informatycznych.
Popularność technik multimedialnych w różnych dziedzinach życia, w szczególności obrazowanie
medyczne w systemach diagnostycznych, spowodowała rozwój multimedialnych baz danych.
Zastosowanie rozwiązań, jakie dają multimedialne bazy danych, może ułatwić implementację modułu
obsługującego obrazowanie medyczne. W praktyce w dalszym ciągu wiele systemów zarządzania
relacyjnymi bazami danych nie stosuje wbudowanych typów i metod dających możliwość
projektowania multimedialnych baz danych. Wymusza to na użytkownikach implementację własnych
rozwiązań [1, 3, 6]. Również nie wszystkie urządzenia medyczne stosowane w służbie zdrowia,
dostosowane są do standardu DICOM, co utrudnia pracę w ramach komputerowych systemów
diagnostyki medycznej. Rozwiązania, wdrażane w ramach systemów informatycznych diagnostyki
medycznej, uwzględniają zarówno rożne podejścia do przechowywania obrazów medycznych, jak i
ich niejednolity standard. Stanowią wsparcie dla poszczególnych ośrodków, jednak w dalszym ciągu
nie pozwalają na globalne zarządzanie zgromadzoną dokumentacją medyczną.
Przeszukiwanie i porównywanie obiektów multimedialnych, w szczególności obrazów medycznych,
wymaga pozyskania informacji o zawartości przechowywanej w obiekcie graficznym (metadanych).
Ilość i rodzaj metadanych zależy od typu rozpatrywanych obiektów graficznych [7, 8]. Standard
DICOM (Digital Imaging and Communications in Medicine) wydany przez National Electrical
Manufacturers Association (NEMA), definiuje sposób przechowywania bitów danych składających się
na obraz, jak również około 2000 znaczników określających metadane związane z samym obrazem
oraz informacjami dodatkowymi (m. in. dane pacjenta, studium przypadku). Ujednolicenie formatu
metadanych zapewnia szybki dostęp do podstawowych informacji dotyczących obiektu graficznego.
W pracy przedstawione zostały możliwości zastosowania w systemach diagnostyki medycznej
wbudowanych w system zarządzania bazą danych typów, metod i funkcji, co znacząco ułatwia zarządzanie
oraz analizę obrazów medycznych. Dane w standardzie DICOM mogą być przechowywane w tabelach,
których kolumny stanowią: miniatura obrazu w formacie JPEG oraz dokumenty XML odpowiadające
metadanym. Zapis metadanych obrazów DICOM w postaci typu XML oraz kolumn atrybutów, pozwala
zastosować w odniesieniu do tych obiektów również inne mechanizmy bazodanowe: indeksy B-drzew,
zapytania XPath oraz przeszukiwanie tekstowe i łączenie w ontologie. Analiza możliwości
przeprowadzona została z zastosowaniem narzędzi Oracle Database [2, 5].
60
XXI Sympozjum PTZE, Lubliniec 2011
Literatura
[1] CURTISE K. C. NG., ZHONGHUA SUN: Development of an online automatic computed radiography
dose data mining program: a preliminary study, Computer methods and programs in biomedicine, vol. 97,
pp: 48-52, 2009 Elsevier Ireland Ltd
[2] GETTYS B., MAURO J.: Oracle Database 10g Release 2 DICOM Medical Image Support, An Oracle
White Paper, October 2005
[3] GUTIERREZ – MARTINEZ J., NUNEZ – GAONA M. A., AGUIRRE – MENESES H., DELGADO –
ESQUERRA R.E.: Design and Implementation of a Medical Image Viewing System Based on Software
Engineering at Instituto Nacional de Rehabilitacion, PAHCE Conference, Mexico 2009
[4] National Electrical Manufacturers Association: Digital Imaging and Communications in Medicine
(DICOM), 2009
[5] Oracle® Multimedia DICOM Developer's Guide 11g Release 2 (11.2), Oracle Database Documentation
Library
[6] PREVEDELLO L., ANDIROLE K., HANSON R., KELLY P., KHORASANI R.: Bussiness Intelligence
Tools for Radiology: Creating a Prototype Model Using Open – Source Tools, Journal of Digital Imaging,
vol. 23 No 2, April 2010
[7] PRYCZEK M., TOMCZYK A., SZCZEPANIAK P. S.: Active Partition Based Medical Image
Understanding with Self-Organised Competitive Spatch Eduction, Journal of Applied Computer Science,
Vol. 18, No. 2, 2010, pp. 67–78
[8] STASIAK B., YATSYMIRSKYY M.: Frequency Domain Methods for Content-Based Image Retrieval in
Multimedia Databases, Methods and Supporting Technologies for Data Analysis, D. Zakrzewska,
E. Menasalvas, L. Byczkowska-Lipinska (Eds), Springer 2009, pp. 137 – 166.
61
XXI Sympozjum PTZE, Lubliniec 2011
WYSOKOGRADIENTOWY SEPARATOR MAGNETYCZNY
W ZASTOSOWANIU DO ROZDZIELANIA
I WZBOGACANIA GAZÓW
Antoni Cieśla
Katedra Elektrotechniki i Elektroenergetyki AGH
Kraków
Streszczenie Separacja gazów to jedna z podstawowych technik uzyskiwania czystych gazów niezbędnych
w wielu procesach przemysłowych. Czyste gazy stosowane są praktycznie we wszystkich obszarach związanych
z ochroną środowiska, produkcją, spalaniem i tp. Separacja magnetyczna to jeden ze sposobów wydzielania
danego gazu z ich mieszaniny, przy pomocy niejednorodnego pola magnetycznego. Wykorzystuje się zatem siłę
magnetoforezy działającą na poszczególne składniki gazu, które charakteryzują się różnymi właściwościami
magnetycznymi.
1. Wprowadzenie
Z uwagi na duże zapotrzebowanie na czyste gazy poszukuje się ciągle nowych rozwiązań
mających na celu obniżenie kosztów ich pozyskiwania. Niektóre gazy można uzyskać
bezpośrednio z powietrza atmosferycznego. Jedną z metod pozwalających na zrealizowanie
tego celu jest separacja magnetyczna bazująca na wykorzystaniu silnie niejednorodnego pola
magnetycznego na składniki gazu różniące się właściwościami magnetycznymi. Przykładem
takich gazów jest tlen (paramagnetyk) i azot (diamagnetyk) [1].Cząstki tlenu powinny być
zatem wciągane w obszar niejednorodnego pola, zaś diamagnetyki (cząstki azotu) –
wypychane z tego obszaru. Powinien nastąpić zatem zamierzony efekt wzbogacania
powietrza w tlen.
2. Wysokogradientowy separator magnetyczny (OGMS) w zastosowaniu do separacji
gazów
Dla osiągnięcia postawionego celu: separacji gazów, można wykorzystać magnetyczne separatory
odchylające. W obszarze działania silnie niejednorodnego pola wytwarzanego przez różnego typu
uzwojenia (np. uzwojenia kwadrupolowe, walcowe itp.), następuje proces separacji. Zasadę
działania tego typu separatora przedstawiono schematycznie na rysunkach 1a, 1b oraz rysunku 2.
Przedmiotem analizy jest wysokogradientowy separator odchylający (w literaturze anglosaskiej
ten typ separatora nazwano OGMS – Open Gradient Magnetic Separator).
62
XXI Sympozjum PTZE, Lubliniec 2011
a)
b)
Fm
x
obszar pola magnetycznego
θ
z
Fg
Rys.1. Działanie separatora odchylającego (a),
idea odchylania cząstek o określonych właściwościach magnetycznych
siłami pola magnetycznego (b),
Rysunek 3 przedstawia schematycznie ideę rozdzielania
właściwościach magnetycznych w separatorze odchylającym.
Rys.2. Schemat ideowy
separatora odchylającego
składników
o
różnych
x
y
Rys. 3. Schemat przepływu strumienia gazu przez
niejednorodne pole magnetyczne
Rys. 4. Projekt stanowiska do badań separacji gazów
Analiza sił działających na drobiny gazu (siła magnetyczna, dynamicznego oporu ośrodka),
prowadzi do wyznaczenia odchylenia cząstek paramagnetycznych ze strugi przepływającego
gazu [2]:
x v x t
2 R 2 Bx2
t
9
2
0
(1)
gdzie: R – promień cząsteczki, – średnia podatnością cząstek magnetycznych, Bx –
składowa wektora indukcji pola magnetycznego, – dynamiczna lepkość ośrodka (gazu),
0 – przenikalność magnetyczna, t – czas przeznaczony na przejście cząsteczki magnetycznej
przez pole magnetyczne.
Z równania (1) wynika, że odchylenie od początkowej drogi jest proporcjonalne do kwadratu
indukcji magnetycznej i czasu t. Regulując tymi dwoma zmiennymi, możliwe jest
kontrolowanie migracji cząstek magnetycznych w kanale, a więc skuteczne prowadzenie
procesu separacji. Na rysunku 4 pokazano projekt stanowiska do prowadzenia badań
mających na celu wzbogacenie powietrza w tlen. Stanowisko wyposażone będzie w czujniki
mierzące przepływ powietrza, jego temperaturę, ciśnienie, prąd zasilania elektromagnesu,
poziom ciekłego helu (w przypadku elektromagnesu nadprzewodnikowego).
63
XXI Sympozjum PTZE, Lubliniec 2011
3. Podsumowanie
Przedmiotem rozważań artykułu jest aplikacja separatora odchylającego (OGMS) do separacji
gazów, a w szczególności wzbogacania powietrza w tlen. Analizując właściwości składników
gazu (powietrza) można postawić tezę, że proces taki jest możliwy przy stworzeniu
odpowiednich warunków: laminarny przepływ strugi gazu z określoną prędkością przez
obszar pola magnetycznego, duża wartość indukcji pola magnetycznego i duża jego
niejednorodność. Projekt stanowiska do prowadzenia stosownych badań przedstawiono na
rysunku 4.
Literatura
[1] Romer R.: Miernictwo przemysłowe, PWN Warszawa 1970
[2] Oh-Taek Son, Jong Wook Roh, Suk-Heung Song, Jae-Sung Park, Wooyoung Lee, Hyo-ll Jung:
Continuous Micro-Magnetophoretic Separation using a Dipole Magnetic Field, Biochip Journal, Vol. 2,
No. 3, pp. 186 – 191, September 2008
64
XXI Sympozjum PTZE, Lubliniec 2011
SEPARACJA CZĄSTEK METODĄ DIELEKTROFOREZY
Katarzyna Ciosk
Politechnika Świętokrzyska, Wydział Elektrotechniki, Automatyki i Informatyki
Dielektroforeza (DEP) jest zjawiskiem ruchu cząstek dielektrycznych pod wpływem
niejednorodnego pola elektrycznego. Nie naładowane cząstki dielektryczne umieszczone w
polu elektrycznym ulegają polaryzacji stając się dipolami. Wartość i kierunek tych
indukowanych dipoli zależy od parametrów pola elektrycznego, wymiarów i struktury cząstki
oraz właściwości dielektrycznych cząstki i ośrodka [1]. W jednorodnym polu elektrycznym
cząstka nie porusza się ze względu na równowagę sił po obu stronach cząstki, natomiast w
niejednorodnym polu powstaje siła wprawiająca cząstkę w ruch. Zjawisko to jest
obserwowane
w
polach
wytworzonych
zarówno
prądem
stałym
jak
i zmiennym. Niejednorodność może dotyczyć wartości pola lub fazy.
Siła DEP działająca na cząstkę w polu elektrycznym można obliczyć za pomocą wzoru [5]:
FDEP (t ) (m(t ) ) E(t )
(1)
gdzie m(t) jest momentem dipolowym, a E wartością wektora pola elektrycznego.
W klasycznej dielektroforezie wywołanej gradientem pola średnia wartość siły wynosi:
FDEP
1
m Re( f CM ) E 2
2
(2)
gdzie m jest przenikalnością ośrodka, wspólczynnikiem zależnym od geometrii cząstki, a
fCM współczynnikiem Clausius-Mossottiego (CM). Współczynnik fCM jest liczbą zespoloną i
dla jednorodnej sferycznej cząstki ma postać:
f CM
p m
p 2 m
(3)
p jest zespoloną przenikalnością cząstki. Siła DEP zależy od gradientu pola. Pole
o odpowiednim gradiencie wytwarza się za pomocą elektrod o różnych wymiarach
i kształtach. Cząstki w takim polu mogą być przyciągane w kierunku elektrody (pDEP) lub
odpychane (nDEP).
Termin DEP został wprowadzony w 1951 roku przez Pohla po zaobserwowaniu ruchu
cząsteczek grafitu i niklu w polu elektrycznym pomiędzy dwiema koncentrycznymi
cylindrycznymi elektrodami [1]. Od tamtej pory trwają badania nad DEP. W ciągu ostatnich
10 lat około 2000 publikacji poświecono teorii, technologii i najnowszym zastosowaniom
dielektroforezy. Obecnie około trzech czwartych spośród 300 publikacji naukowych
dotyczących DEP publikowanych co roku jest ukierunkowane na zastosowania praktyczne.
Dielektroforeza ma potencjalnie szeroki obszar zastosowań, zwłaszcza w mikroskali. Obecnie
teoria i technologia są na tyle zaawansowane, aby dielektroforeza mogła być stosowana
zarówno w przemyśle np. do oddzielania cząstek mineralnych, mikro-polerowania,
65
XXI Sympozjum PTZE, Lubliniec 2011
manipulacji i montażu mikro-komponentów, jak i w dziedzinach biomedycznych:
biosensorów, terapii komórkowej, leków, diagnostyki medycznej, do transportu i segregacji
komórek. Możliwość stosowania DEP jako narzędzia do manipulowania nanocząstkami
wykorzystuje
się
w
biologii,
medycynie
i mikroelektronice [2]. Ciągły postęp w technologii obejmuje rozwój skomplikowanych
kształtów elektrod, nowych materiałów (np. polimery silikonowe) oraz metod wytwarzania.
Większą siłę DEP można uzyskać przez zmianę kształtu i zmniejszenie wielkości elektrody.
Możliwość wytwarzania elektrod rzędu mikronów, uczyniła DEP bardziej praktyczną,
ponieważ napięcie konieczne do uzyskania użytecznych sił działających na małe cząstki
zmniejszyło się z kilkudziesięciu kilowoltów do kilku woltów. Do zasilania elektrod zwykle
stosuje się napięcie zmienne o częstotliwości radiowej.
Za pomocą dielektroforezy można separować cząstki. Siły DEP mogą być wykorzystane do
przechwytywania i uwalniania cząstek w systemach skali mikro. Jeden ze sposobów oparty
jest na pDEP, w którym wybrane cząsteczki są zatrzymywane za pomocą sił na elektrodach, a
pozostałe cząstki przedostają się dalej przez kanał i gromadzone są w zbiorniku [4, 5].
Częściej jednak do separacji cząstek wykorzystuje się połączenie sił DEP i
hydrodynamicznych sił oporu tak, by
cząstki były odpychane od elektrod
i unoszone w kanale. Na różne cząsteczki działają siły różnej wielkości i lewitują one na
różnych wysokościach. Dodatkowo różne cząstki poruszają się z różną prędkością. Wszystko
to daje możliwość oddzielania różnych typów cząstek w jednym procesie. Technika ta znana
jest jako FFF [5]. Bardzo ważnym zagadnieniem jest separacja komórek. Obecnie,
najbardziej powszechnie stosowane metody separacji komórek są uzależnione od istnienia
specyficznych antygenów na powierzchni komórek oraz sond do tych antygenów.
Nieodwracalne mocowanie znaczników do komórek może wpływać na zachowanie komórek.
W celu uniknięcia możliwych zakłóceń lub w przypadku braku znacznika, niezbędne do
identyfikacji komórek i manipulacji nimi są metody alternatywne. Otwiera to potencjalnie
ważne zastosowania DEP jako narzędzia w badaniach nad komórkami [3, 4]. Siła DEP zależy
od rozmiarów komórek oraz własności wewnętrznych. Również wiek komórek, skażenie
chemiczne, wzrost temperatury prowadzi do wyraźnych różnic w ich ruchu pod wpływem
DEP. DEP ma wiele zalet w zastosowaniach biomedycznych.
Stosując ją można:
separować komórki w celu ich identyfikacji,
separować komórki bez konieczności oznakowania biochemicznego lub modyfikacji,
separować rzadkie komórki unikając utraty komórek,
separować żywe komórki bez uszkodzeń biologicznych lub przy minimalnym
uszkodzeniu,
szybko tworzyć próbki posortowanych komórek.
Literatura
[1] Pohl H. A.: Dielectrophoresis, Cambridge Univesty Press, 1978
[2] Pethig R.: Dielectrophoresis: Status of the theory, technology, and applications, Biomicrofluidics 4, 2010
[3] Pethig R., Menachery A., Pells S., De Sousa P .: Dielectrophoresis: A Review of Applications for Stem Cell
Research, Journal of Biomedicine and Biotechnology, Volume 2010
[4] Ya n g F.a t a l : Dielectrophoretic separation of colorectal cancer cells, Biomicrofluidics 4, 2010
Zang C. at al: Dielectrophoresis for manipulation of micro/nano particles in microfluidic systems, Analytical
and bioanalytical chemistry, vol. 396, no. 1, pp. 401-420.
66
XXI Sympozjum PTZE, Lubliniec 2011
A NEW DESIGN OF LOW COST ENERGY EFFICIENT
SINGLE PHASE BRUSHLESS DC MOTOR
Goga Cvetkovkski1, Paul Lefley2, Lidija Petkovska1, Saeed Ahmed2
1
Ss. Cyril and Methodius University, Faculty of Electrical Engineering & Information Technologies,
Skopje, Macedonia
2
University of Leicester, Department of Electrical Engineering, Leicester, UK
Introduction
The problem of design optimisation of motors sometimes arises because of the stiff
competition among manufacturers to produce a motor giving the same performance but at
a reduced cost. Sometimes the application requires a motor of certain weight or shape that has
to satisfy given requirements. In general the optimal design of electrical machines is
a complex multi-variable, non-linear and constrained optimisation problem. The non-linear
nature of the active materials, together with the discreteness of some design parameters,
renders the task of optimisation a mixed real number programming problem. A reasonably
simplified form of the design procedure may be attacked by various approaches accumulated
into two main topics: classical optimisation techniques (deterministic methods) versus genetic
algorithm (stochastic methods). Researchers have used classical (usually gradient based)
optimisation techniques for this task for a long time. However, recently, evolutionary
computation techniques such as Genetic Algorithms (GA) have been used for optimisation
procedures. These methods are claimed to be more successful in converging to a global
maximum/minimum, whilst avoiding the local ones. Also, they avoid the problem of starting
the search from a suitable feasible solution, often encountered in classical optimisation
techniques. Therefore, in this study, the authors of the paper decided to use the genetic
algorithm as a search tool in the optimal design of a single phase brushless DC motor –
SPBLDCM. The optimal design programme GA-ODEM (Genetic Algorithm for Optimal
Design of Electrical Machines) [1] uses the Genetic Algorithm as an optimisation tool. The
design variables are presented as vectors of floating-point numbers. The search starts from a
randomly created population of strings representing the chromosomes and reaches the
optimum solution after a certain number of generations by applying genetic operations. The
search can continue indefinitely. Therefore, a stopping rule is necessary 'to tell' the algorithm
when it is time to stop. This is achieved in many different ways and is also user and problem
dependent. Some of the possible methods are; to fix the number of generations and to use the
best individual of all generations as the optimum result; or, to fix the time elapsed and to
select the optimum result similarly; or to let the entire population converge on to an average
fitness within some error margin. The stopping rule applied in the GA-ODEM programme is
the number of generations.
Genetic Algorithm Optimal Design Motor Model Description
The efficiency of the motor is selected as an objective function of the optimisation, because
efficiency and energy saving are topics of current interest. The motor efficiency is calculated
analytically in the optimisation process. The general aim of the single phase brushless DC
motor optimal design is to obtain a motor with maximised efficiency while satisfying certain
performance, as magnetic and geometric constraints. The design optimisation is performed on
67
XXI Sympozjum PTZE, Lubliniec 2011
a prototype, with previously defined topology of a four pole single phase brushless DC motor
with rated voltage, 300 V, and speed, 1500 rpm [2]. The motor is with concentrated windings
mounted on the asymmetrical stator poles and has 4 permanent magnets with Br=1.13 T
mounted on the rotor. A 2D partial cross-section presentation of the prototype motor and
some of the optimisation parameters is shown in Figure 1. It should be mentioned that the
motor has an asymmetrical air gap, which is made by modifying the small stator poles, and
the rotor permanent magnets.
According to the design characteristics of the SPBLDCM, some of the parameters are chosen
to be constant and some to be variable, such as: outside radius of the rotor iron core Rro,
permanent magnet radial length lm, air-gap between the rotor PM and stator poles g, opening
between the stator poles bso, axial length of the motor L, and radius of the stator winding
single wire rcu. All the other geometrical parameters are determined as function of the
optimisation parameters.
The efficiency of the motor, as an objective function of the optimisation can be presented with
the following equation:
efficiency
T m
T m PCu PFe Ps
(1)
where: T-rated torque, ωm-rated speed, PCu-ohmic power losses, PFe-core losses and Ps-other
constant losses calculated from no load test of the machine. The optimal design process of the
single phase brushless DC motor is a maximisation problem of the objective function, where
the torque is one of the constraints. The convergence of the efficiency of the motor as an
objective function during the GA optimisation search for 15000 generations is shown in Fig. 2.
Fig. 1. SPBLDCM optimisation parameter
presentation
Fig. 2. GA search efficiency change during
generations
Optimisation Results
The values of the optimisation parameters including the efficiency of the basic and the
optimised motor solution are presented in Table 1 in order to be able to compare the two
solutions some specific parameters of the prototype and of the GA optimal solution are shown
in Table 2.
68
XXI Sympozjum PTZE, Lubliniec 2011
Table 1. Comparative Data of the Two Models
Optimisation
parameters
Rro (m)
lm (m)
g (m)
bso (m)
L (m)
rcu (m)
Efficiency (/)
Basic Model
0.0380
0.0020
0.0010
0.0023
0.1080
0.0004
0.8828
GA SPBLDCM
Solution
0.0357
0.0022
0.0009
0.0040
0.1089
0.0005
0.9048
Table 2. Initial motor and GA solution data comparison
Parameters
N (/)
Xn (m)
Xc (m)
Xp (m)
Rso (m)
Iph (A)
Rph (ohm)
PCu (W)
PFe (W)
(/)
Description
total number of turns of
stator winding
gap between the pole
shoe and the stator
inner radius
stator pole shoe
thickness, stator back
iron thickness
stator pole width
stator outside radius
phase current
phase resistance
ohmic losses
iron losses
efficiency
Initial
Motor
GA
Solution
648
644
0.00757
0.0117
0.014
0.0133
0.028
0.0766
3.30
6.987
91.38
32.06
0.8828
0.0266
0.0771
3.37
4.328
59.73
31.81
0.9048
In the full version of the paper a more detailed presentation of the GA optimisation procedure
will be presented. The comparison analysis of the optimised solution and the basic model is
going to be based on the values of the optimisation objective function, on the values of the
optimisation parameters, and on a sample of electric and magnetic parameters of the motor.
The change of the value of the objective function and the optimisation parameters through the
optimisation procedure is will also be presented. Finally the optimised solution and the
prototype using the results of the 2D FEM magnetic field calculation are going to be analysed
and compared. Performance characteristics, as magnetic field and air gap flux density
distribution will be presented and analysed.
References
[1]
[2]
G. Cvetkovski, L. Petkovska, S. Gair, "Genetic Algorithm Applied in Optimal Design of PM Disc Motor
Using Specific Power as Objective", Chapter 13 of the Book Studies in Computational Intelligence Computational Methods for the Innovative Design of Electrical Devices, Springer, 2010, pp.245-266.
S. Ahmed and P. Lefley, "Development of a Single Phase PM BLDC Motor from a Novel Generic Model",
in Proc. 2009 11th Spanish Portuguese Conference on Electrical Engineering–11CHLIE, Zaragoza, Spain,
2009, pp. 1-6.
69
XXI Sympozjum PTZE, Lubliniec 2011
MOISTURE MEASUREMENT IN SOLID SAMPLES
USING RAMAN SPECTROSCOPY
Venco Čorluka1, Željko Hederić1, Miralem Hadžiselimović2
1
Josip Juraj Strossmayer University of Osijek, Faculty of Electrical Engineering,
Croatia
2
University of Maribor, Faculty of Energy Technology,
Slovenia
The main problem of this paper is to develop a device for measuring moisture in the
near infrared region and explore opportunities of reflective method of measuring the solid
samples. There are several equally used methods for measure of moisture content in solids
and one with the most practical real-time usage is Raman spectroscopy. That is a
spectroscopic technique used to provide information about vibrational, rotational and other
low frequency transitions in molecules. It relies on inelastic scattering of monochromatic
light, usually from a laser in the visible, near infrared, or near ultraviolet range. Inelastic
scattering means that the frequency of photons in monochromatic light changes upon
interaction with a sample. Photon of the laser light are absorbed by the sample and then
reemitted with frequency shifted up or down in comparison with original monochromatic
frequency, which is called the Raman effect. Method of direct measurement of the
characteristic frequency is based on fact that if the sample is irradiated with infrared light,
then those frequencies which correspond to the energy of the vibrational modes are absorbed.
This absorption is what infrared absorption spectroscopy measure. For Raman scattering the
sample is irradiated with visible light, and a very small proportion is scattered inelastically. In
this case the incident photon gives up a small part of its energy to a vibrational mode, and the
difference between the incident and inelastically scattered radiation gives information about
the energies of the vibrational modes.
Fig. 1. Vibrational modes of water – the water molecule possesses two mirror vertical planes and one axis
The Raman effect can be understood as a scattering process of photons on molecules. If the
scattering occurs without change in the energy of the incident photon, the interaction is called
elastic or Rayleigh scattering16, and if it involves a change of this energy, inelastic or Raman
scattering. The change in the kinetic energy of the molecule caused by the scattering process is:
h( o ')
M
(1)
2( o '2 )
The photon energy of the scattered light may be smaller, equal to or larger than that of the
incident radiation. If the energy is smaller - this implies that the initial energy level was lower
than the final level. The difference energy is used to induce a transition from the vibrational
level k to level m. This corresponds to the Stokes lines in the Raman spectrum. If the photon
energy does not change - it means that the energy levels of the molecule before and after the
70
XXI Sympozjum PTZE, Lubliniec 2011
collision are the same, and Rayleigh scattering occurs. Finally, if the photon energy increases
– the additional energy is due to a transition from a higher vibrational level k to a lower level
m, and the process contributes to the anti-Stokes lines. Due to its unique advantages over
other analytical techniques make Raman spectroscopy an ideal tool for chemical analysis. It
requiring no special sample preparation and it is a nondestructive and noncontacting method
of obtaining the fingerprint spectrum of materials, because it can analyze samples via sample
plastic bags, glass vials, and in aqueous solution. It does not require a large amount of a
sample to do analysis; the sample can be as small as 1–2 µm across. A short amount of
measuring time, normally a few seconds, is required to obtain a Raman spectrum. Thus, it can
be used to monitor chemical reactions in real time. There are four basic components of what a
typical Raman system consists (Fig. 2): an excitation source, optics for sample illumination,
double monochromator and a signal processing system.
Fig. 2. Schematic of a Raman system
Measured Raman spectrums of the soil sample (Fig. 3), furthermore, have to be compared to
norm spectrum of water (Fig. 4). As it is shown on vibrational modes of water (Fig. 1), in
Raman spectrum of water it is noticeable the bands of symmetric stretching
(ν1 =3652 cm-1), an asymmetric stretching (ν3 =3756 cm-1) and a symmetric bending
(ν2 =1595 cm-1). The complete Raman spectrum of the soil sample that has been tested has
three bands in the region 1003500 cm-1 (Fig. 3). Two OH bands are observed at 3355 and
3583 cm-1. The band at 3355 cm-1 is assigned as an OH vibrational mode in their samples,
which contain only 16% moisture.
Fig. 3 Raman spectrum of soil sample with 16%
moisture that has been tested in the region
1003500 cm-1
Fig. 4. Raman spectrum of water is norm spectrum
The method selected for measurements in this work depends on a variety of factors such as
accuracy, cost, and ease of use. In opposite to those classical methods of monitoring soil
moisture, the best advantage of Raman spectroscopy is real time measurement that gives
digital spectrum which is easy to process and convert in any suitable format and the best
example of that is newest lunar exploration, which will be presented in the full paper.
71
XXI Sympozjum PTZE, Lubliniec 2011
References
[1] Lee, W. S., Sanchez, J. F., Mylavarapu, R. S., Choe, J. S. Estimating Chemical properties of Florida soils
using spectral reflectance. Agricultural and Biological Engineering Department University of Florida,
Gainesville, Florida, Trans. ASAE 46(5), pp. 1443-1453, (2003).
[2] Long, D. A. Raman Spectrometry. London, McGraw-Hill International Book Company, (1977).
[3] Svanberg, S. Atomic and molecular spectroscopy – Basic aspects and practical applications. Springer
Verlag, Heidelberg, (2004).
72
XXI Sympozjum PTZE, Lubliniec 2011
IMPACT OF THE THREE-PHASE TRANSFORMER
TOPOLOGY ON THE LEAKAGE INDUCTANCE
Mihail Digalovski, Lidija Petkovska
Ss. Cyril and Methodius University, Faculty of Electrical Engineering and Information Technologies,
Macedonia
Introduction
In the paper is presented an analysis of the impact of the transformer topology on the leakage
inductance, by using the 2D electromagnetic field analysis. For an existing three-phase
transformer, several simulation models with variable topology are developed, and the
respective leakage inductance is numerically calculated. The obtained results are presented in
Tables and on graphs, which are afterward analysed.
The object of study is a three phase distribution transformer from the production programme
of 'EMO' transformers factory (Ohrid, Macedonia), type ETN 50-10/0.4, with winding
configuration Yzn5; in the paper it is aceepted as original model. The rated data of the
transformer are:
Sn=50 kVA; U1/U2=10/0,4 kV; I1/I2=2,89/72,2 A; ukn=4 %; fn=50 Hz; p=±2x2,5 %; Yzn5.
Methodology
At the beginning, the original topology of the three-leg core-type transformer is studied. The
proposed methodology is developed basing on the application of the Finite Element Method
(FEM) in two-dimensional domain. For numerical calculations of the magnetic field of the
transformer, it is used FEMM 4.2 code. The corresponding simulation FEM model, by
matching the transformer geometry and the properties of the used materials, is developed.
Two new topologies from the original transformer model are derived; they are subject to the
following requests: to keep same volume of the magnetic core; induced back EMF in
windings to remain unchanged. The first request is satisfied by a simultaneous change of the
yoke length and leg height of the transformer core. Keeping the same value of the induced
back EMF means to retain the same number of turns per phase winding, without changing the
leg cross-section. However, in order to avoid problems of placing the windings, the window
openings where they are laid, should remain the same as in the original model; hence, the
shape of the winding's coils in the new developed topologies will be accordingly changed. If
the height of the transformer core is increased, its width has to be decreased, and vice-versa;
wider core will mean lower legs.
In the magnetic field theory, there exist several approaches to inductance calculation. In the
paper, computational procedure for determination the leakage inductance Lζ of the
transformer windings is based on the magnetic energy stored in the regions carrying currents,
i.e. in the winding domains. The following expression is derived:
L
A J dV
V
(H)
I2
73
(1)
XXI Sympozjum PTZE, Lubliniec 2011
The computed FEM results, for the leakage inductance of the original transformer model, are
compared with the experimentally obtained ones from the testing protocol; thus the accuracy
of simulation model is verified. Once the model is accepted as correct and accurate, it will be
implemented for simulations of new developed topologies, without any need results to be
proved by measurements; hence, the determined values of the leakage inductance are
considered as relevant.
In order to check the leakage reactance values in all three models, starting from the widely
accepted equation in the transformer design
X 7.9 10 9 f
ab
2
W1
hn
3
P
() ,
(2)
for this particular object, it is derived the expression for calculation the leakage inductance as
a function of only two variables Xζ = f(H,W), where H is the height, and W is the width of
windings.
X 2,59928
W 2 146,25 W 1518,75
H
() .
(3)
The procedure will be elaborated in detail, in the full manuscript.
Results
The numerical FEM calculations are carried out by using the 2D FEM software. Actually, the
problem is more 3D than 2D, and the three-dimensional effects of the transformer topology
have to be taken into consideration when developing the FEM transformer model. The 2D
planar model, shown in Fig. 1, is the best fitted to the transformer geometry. The timeharmonic FEM approach, at rated frequency fn=50 Hz, is employed. The description of the
transformer model will be presented in the full paper. The leakage inductance of the windings
is calculated from the operating regime at bolted short circuit at transformer terminals. The
3D domain of the transformer is included by field calculations across two mutually
orthogonal planes X-Y and Z-Y. The corresponding magnetic flux distribution in the both
planes is presented in Fig. 2 and Fig. 3. The measured leakage inductance, together with the
numerically determined from eq. (1), including the two components is presented in Table 1.
The results show very good agreement.
Fig. 1. FEM model of the transformer
Fig. 2. Leakage fluxes in X-Y plane
74
XXI Sympozjum PTZE, Lubliniec 2011
Leakage Reactance= f (Width ; Height)
180
Xs - Leakage Reactance
160
140
120
100
80
60
40
20
0
300
280
260
240
220
200
180
160
140
120
100
10
12
H - Height of winding
Fig. 3. Leakage fluxes in Z-Y plane
14
16
18
20
22
24
26
28
30
W - Width of winding
Fig. 4. Three-dimensional graph of function Xζ=f(H,W)
In Fig. 4 is presented the dependence Xζ=f(H,W), calculated from eq. (3), whilst in Table 2
are given comparatively, the values of Xζ for the three analysed transformer topologies.
Considering the results for the original model in the first row of Table 2, and comparing them
with the measured ones from the Table 1, it is obvious that not only the FEM methodology,
but also the derived analytical expression for determination the leakage reactance, eq. (3),
show very close results. More details on these issues, including the conclusions, will be
presented in the full paper.
Table.1. Comparison of leakage inductance
in the original model of the transformer
Value
Method
Measured
FEMM
LζX-Y
(H)
/
0.109
LζZ-Y
(H)
/
0.1135
Lζ=LζX-Y+LζX-Y
(H)
0.2236
0.2225
Table.2. Computational results for
Xζ=2πfLζ
(Ω)
70.22
69.87
Xζ
Method
FEMM Analytical Deviation
Value/Model
Xζ (Ω) - I model
69,87
70,14
0,38 %
(original TR)
Xζ (Ω) - II model 106,32 116,14
8,45 %
Xζ (Ω) - III model 37,37
34,2
-9,27 %
References
[1] Mihail Digalovski, Lidija Petkovska, "Finite Element Analysis of Electromagnetic Phenomena in a Small
Three Phase Transformer", Proceedings of XII International Conference on Electrical Machines, Drives
and Power Systems – ELMA'2008, Vol. 1, pp. 14–19, Sofia, Bulgaria, 2008.
[2] Meeker, D. Finite Element Method Magnetics_FEMM. User’s Manual. V 4.2, 2007: http://femm.fostermiller.net
75
XXI Sympozjum PTZE, Lubliniec 2011
MONOLITHIC MODEL OF INDUCTION HEATING
OF A THIN CONDUCTIVE PLATE
WITH RESPECTING THERMOELASTICITY
Ivo Dolezel, Petr Kropik, Bohus Ulrych
University of West Bohemia, Faculty of Electrical Engineering
Czech Republic
The process of induction heating is mostly modeled by the spatial and temporal distributions
of magnetic vector potential A and temperature T . This approach, however, can fail when
solving electro-thermal problems characterized by geometrically incommensurable
dimensions of some structural elements. This is typical for selected planar structures such as
thin plates and pipes. The authors published [1] an alternative model of the problem based on
electric vector potential T . This work improves the model (all nonlinearities are taken into
account) and includes also the effect of thermoelasticity influencing geometry of the
investigated plate.
Consider a nonferromagnetic, electrically conductive plate of surface 1 and boundary ,
whose thickness 0 and electrical conductivity is el . The plate is locally (in an area
2 1 ) exposed by a time variable external magnetic field Bext t , see Fig. 1.
Bext(t)
z
el
y
P n
2
1
Jind(t)
x
0
Fig. 2. Basic arrangement of the investigated system
The basic equation for electric vector potential T in the plate reads [1]
1
T Bext
curl curl T 0
t
t
el
whose right-hand side is known. The currents induced in the plate are characterized by
density
Jind curl T
and density of the corresponding volumetric losses are expressed by the formula
wJ Jind / el .
2
76
(1)
(2)
(3)
XXI Sympozjum PTZE, Lubliniec 2011
The nonstationary temperature field produced by the heat losses wJ is generally described by
the equation
T
div grad T c
wJ
(4)
t
denotes the thermal conductivity, stands for the specific mass and c is the specific heat.
The solution of the thermoelastic problem is described by the Lamé equation in the form
grad div u u 3 2 T grad T f
0,
(5)
where 0, 0 are coefficients associated with material parameters by the relations
E
E
,
.
(6)
2 1
1 1 2
Here E denotes the modulus of elasticity and is the Poisson coefficient of the transverse
contraction. Finally u represents the displacement vector, T is the coefficient of the linear
thermal dilatability of material and f stands for the vector of the internal volumetric forces
(for example of electromagnetic or gravitational origin).
The computations were carried out by own software. The coupled partial differential
equations describing the electromagnetic and temperature fields are solved by the finite
2
difference method using explicit approximations of accuracy O r t .
The algorithm was tested on a circular aluminum disk of radius r2 0.1 m that is exposed in a
circular region of smaller radius r1 0.02 by external harmonic magnetic field
Bext r , t z 0 Bz,ext r , t . Here Bz ,ext t B0 sin 2πft , where B0 and frequency f may
vary within some range.
For illustration, Fig 2 shows the dependence of the radial displacement ur on the amplitude
B0 of the external magnetic field. The thin lines show its time evolution at radius r1 (for
B0 0.50, 0.75, 1.00 T); the thick lines depict the same quantity at radius r2 .
25
–5
ur (10 m)
20
15
I.
II.
III.
IV.
V.
VI.
10
5
0
0
30
60
90
120
150
180
t (s)
ur on amplitude B0 of the external magnetic field
( r1 0.02 m, 0.001 m, f 50 Hz): I. B0 0.50 T, r r1 , II. B0 0.75 T, r r1 ,
Fig. 17. Dependencies of radial displacements
77
XXI Sympozjum PTZE, Lubliniec 2011
B0 1.00 T, r r1 , I. B0 0.50 T, r r2 , II. B0 0.75 T, r r2 , VI. B0 1.00 T, r r2
Acknowledgment
III.
This work was supported by the European Regional Development Fund and Ministry of
Education, Youth and Sports of the Czech Republic (project No. CZ.1.05/2.1.00/03.0094:
Regional Innovation Centre for Electrical Engineering – RICE) and by Grant projects GACR
P102/11/0498 and GACR 102/09/1305.
References
[1] I. Dolezel, P. Kropik, B. Ulrych: T-Potential Based Model of Induction Heating of Thin Conductive Plates
in Hard-Coupled Formulation. Przeglad Elektrotechn. 87(3), 2011, pp. 41–44.
78
XXI Sympozjum PTZE, Lubliniec 2011
DOBÓR MIAR ODLEGŁOŚCI
W HIERARCHICZNYCH METODACH
WYKRYWANIA WYJĄTKÓW
Agnieszka Duraj1, Andrzej Krawczyk2
1
Politechnika Łódzka, Instytut Informatyki
Politechnika Częstochowska, Wydział Elektryczny
2
W procesie podejmowania decyzji opieramy się na przybliżonych zasadach działania –
zachowania się obiektów. Znamy naturę zjawisk, pewne zależności heurystyczne. Zbieranie
wszelkiego rodzaju informacji oraz gromadzenie danych ma duże znaczenie, jest to bowiem
wstęp do zdobywania wiedzy. Obecnie człowiek jest zalewany strumieniami informacji,
których nie jest w stanie szybko przeanalizować. Pozyskiwaniem wiedzy z dużych baz
danych zajmuje się dziedzina wiedzy zwana eksploracją danych (ang. Data mining), która ma
charakter interdyscyplinarny obejmujący zagadnienia związane zarówno z teorią informacji,
uczeniem maszynowym, jak i lingwistyką, czy też statystyką. Obejmuje ona kierunki badań
dotyczące choćby reguł asocjacyjnych, klasyfikowania, grupowania, regresji, analizy
szeregów czasowych a także wykrywania wyjątków.
Metody wykrywania wyjątków w zbiorach danych, traktowane jako różnego rodzaju
anomalie, powstałe np. z powodu mechanicznego uszkodzenia, zmiany w zachowaniu
systemu, czy choćby poprzez naturalny błąd człowieka, są stosowane już od wielu lat. Jak się
jednak wydaje, ten problem badawczy jest bardzo istotny i nadal aktualny. Wykrycie
wyjątków może zidentyfikować defekty, usunąć zanieczyszczenia danych a przede wszystkim
stanowi podstawę w procesach podejmowania decyzji. Zjawisko detekcji szczególnych cech
obiektu – wyjątków, jako problem badawczy, dotyczy wielu dziedzin życia np. finansów i
bankowości, medycyny i biomedycyny, ubezpieczeń, przemysłu telekomunikacyjnego,
różnych działów gospodarki (marketingu i produkcji), itp. i obejmuje szerokie spektrum
technik. Zobacz choćby prace [1,2], które stanowią krótki przegląd tych metod.
W niniejszym opracowaniu zajmujemy się detekcją wyjątków w oparciu o zagadnienie
grupowania danych (ang. Clusters Analysis). Grupowanie danych, zgodnie z [3], jest to
identyfikacja naturalnych grup, w których obiekty podobne do siebie są umieszczane w jednej
grupie, natomiast obiekty znacznie się różniące w różnych grupach. Grupowanie, jako
uczenie bez nadzoru, stanowi pierwszy krok do lepszego poznania danego zbioru obserwacji.
Biorąc pod uwagę kryterium sposobu przetwarzania danych metody grupowania można
podzielić na:
Metody optymalizacyjno-iteracyjne. Są to np. np. algorytm K-średnich (ang. K-means)
oraz K-mediana (ang. K-medoids).
Metody hierarchiczne, w których w zależności od sposobu tworzenia hierarchii
wyróżnia się metody aglomeracyjne i deglomeracyjne (podziałowe).
Metody analizy skupień.
Metody oparte o teorię grafów,
Metody oparte o sieci neuronowe
Metody oparte o algorytmy genetyczne.
W niniejszym opracowaniu autorzy omawiają hierarchiczne aglomeracyjne metody
grupowania danych, które polegają na tworzeniu nowych klastrów poprzez łączenie klastrów
79
XXI Sympozjum PTZE, Lubliniec 2011
już istniejących w oparciu o odległości między nimi. Zgodnie z powyższą uproszczoną
definicją wymagają one zdefiniowania funkcji miary odległości (miary bliskości), oznaczonej
d(x,y). Najczęściej wykorzystywanymi miarami w literaturze przedmiotu są m.in.: miara
euklidesowa, Manhatan, Minkowskiego, Czebyszewa ale także Mahalanobiusa, Sebestyena,
itd. Autorzy wielu prac stosując wybrane algorytmy grupowania nie podają warunków
wyboru miary odległości. Zastosowanie różnych miar może spowodować uzyskanie innych
wyników grupowania, czy też klasyfikacji. Jest to związane z współmonotonicznością miar.
Własność ta powoduje, iż odległość między obiektami pomierzona na dwa sposoby nie jest
proporcjonalna. Oczywistym wydaje się także fakt, iż podniesienie do kwadratu miary
odległości (d2(x,y)) powoduje zwiększenie różnicy między bardziej odległymi obiektami
w stosunku do różnic między bliskimi obiektami, zaś zastosowanie
odwrotnie.
W pracy podajemy wyniki przeprowadzonych badań własnych związanych z doborem funkcji
odległości.
Literatura
[1] Duraj A., Krawczyk A., Finding outliers for large medical datasets, Przegląd Elektrotechniczny (Electrical
Review), ISSN 0033-2097, R. 86 NR 12/2010, pp.188-191
[2] Hodge V.J., Austin J., A Survey of Outlier Detection Methodologies, Artificial Intelligence Review,
Volume 22, 2004, pp. 85-126
[3] Jain A. K., Murty M. N., Flynn P. J., Data clustering: a review, ACM Computing Surveys, 31(3):264–323,
1999
80
XXI Sympozjum PTZE, Lubliniec 2011
THE HISTORY OF HYPERTHERMIA
AND THE ATTEMPTS OF UTILIZING IT
IN ELECTROTHERAPY
Piotr Gas
AGH University of Science and Technology
Department of Electrical and Power Control Engineering
Kraków
Hyperthermia as a method of treating cancer has a long history, dating back to around 3000
B.C. The so-called Edwin Smith papyrus states that ancient Egyptians used hot blades and
sticks to treat breast cancer [14]. Many physicians from ancient Greece and Rome shared a
belief that knowing how to control the human body temperature could allow them to cure all
diseases, including malignant tumors, which were well-known and described in that time [9].
For example, Hippocrates (460-370 B.C.), the Greek philosopher and scientist, postulated that
a disease that cannot be cured with iron, can be cured with fire, and Celsius (1st century
A.D.), the Roman physician, described hot baths to be helpful against many illnesses [10].
The first paper on hyperthermia was published in 1886 by a German surgeon W. Bush. He
described the case of a 43-year-old woman with sarcoma that developed on her face and
disappeared after fever caused by erysipelas [2]. The same observation was made by a young
American surgeon W. B. Coley in 1891, who thereupon developed a toxin with bacteria
which causes erysipelas with its typical fever [3]. He is thereby called the father of the
modern use of hyperthermia. Next was F. Westermark, who tried to treat an inoperable cancer
of the cervix uterine by using high-temperature circulating water [15].
The first electromagnetic cancer treatment was performed as early as the beginning of the
19th century. The first use of electric-field heating for controlling the cancer took place in
1800 [13]. Since that time there was considerable competition among contemporary
researches for recognition as being the first to apply electricity for heating tissue. However,
the most famous person who established the basis for capacitive and inductive heating of
tissue was a French physicist and physiologist Jacques-Arsene d'Arsonvel. Devices which he
developed were very popular at the turn of the 19th and 20th century and widely used against
many diseases [5].
In the early 20th century, due to an inadequate development of heating methods and
temperature measurement techniques, as well as the lack of positive clinical results, the
consent for treatment using hyperthermia was withdrawn. Since that time, traditional surgical
methods as well as radiotherapy and chemotherapy began to dominate in the treatment of
tumors [11]. In 1909 G. Schwarz described and in 1910 Muller performed thermopenetration
that was heating the tissue without destroying it in order to increase its blood supply [9]. Then
Schwartz observed that hyperthermia in combination with radiotherapy is beneficial. Because
of these results the revival of interest in hyperthermia was observed after Word World II.
Technical revolution in the heat therapy occurred when the microwave heating techniques
have been developed and applied in medicine. They were the better options in the local
heating of tumors, including ones located deep in the human body.
81
XXI Sympozjum PTZE, Lubliniec 2011
Worldwide interest in hyperthermia had become the starting point for organizing the
International Symposium on Cancer Therapy by Hyperthermia and Radiation in Washington,
D.C. (USA) in 1975. Other similar congresses took place in Essen (Germany) in 1977, and in
Fort Collins (Colorado, USA) in 1980. Since then, the International Symposium on
Hyperthermic Oncology has been held every four years. In 1981 the North American
Hyperthermia Society was created and two years later the European Hyperthermia Institute
was formed. In Japan, hyperthermia research started in 1978 and the Japanese Society of
Hyperthermia Oncology was established in 1984. In 1985 the North American Hyperthermia
Society, together with the European Society for Hyperthermic Oncology and the Japanese
Society of Hyperthermic Oncology cooperatively founded the International Journal of
Hyperthermia and adopted it as their official journal. Currently, it is the most important
periodical devoted to hyperthermia [6]. In 1988, by combining hyperthermia with modern
knowledge of bioelectromagnetism and human physiology, a new direction in the fight
against cancer called oncothermia was created, which is still being developed [1]. It is worth
noting that in 2010 the First International Symposium Oncothermia took place in Cologne
(Germany) and the first issue of the Oncothermia Journal was published [7].
Since 1979 heating tissue for controlling cancer has become a widely used method in
oncology clinics, hospitals, and cancer research centers. Clinical studies conducted in recent
years confirm the effectiveness of hyperthermia, especially in combination with radiotherapy
and/or chemotherapy [4, 12]. Scientists are still looking for new techniques that will make
hyperthermia a simpler, safer, more effective and widely available method for patients. The
use of nanotechnology in hyperthermia treatment e.g., magnetic fluid hyperthermia, which is
currently under experimentation, seems particularly promising [8].
References
[1] Andocs G, Szasz O, Szasz A., Oncothermia treatment of cancer: from the laboratory to clinic, Electromagn
Biol Med., 2009, 28(2):148-65.
[2] Bush W., Über den Finfl uss wetchen heftigere Eryspelen zuweilen auf organisierte Neubildungen dusuben.
Verh Natruch Preuss Rhein Westphal 1886; 23: 28–30.
[3] Coley W.B., The treatment of malignant tumors by repeated inoculations of erysipelas with a report on ten
original cases, Am J Med Sci, 1893; 105:487-511.
[4] Falk MH, Issels RD. Hyperthermia in oncology. Invited review. Int J Hyperthermia 2001; 17:1-18.
[5] Geddes L.A., Retrospectroscope. d'Arsonval, physician and inventor, IEEE Engineering in Medicine and
Biology, 1999, Vol. 18, No. 4., pp. 118-122.
[6] http://informahealthcare.com/hth
[7] http://www.oncothermia-journal.com/journal/
[8] Johannsen M., Clinical hyperthermia of prostate cancer using magnetic nanoparticles: Presentation of a
new interstitial technique, Int. J. Hyperthermia, 2005, pp. 1–11.
[9] Kapp D.S., Hahn G.M., Carlson R.W., Principles of hyperthermia. In: Bast R.C. Jr., Kufe D.W., Pollock
R.E., Weichselbaum R.R., Holland J.F., Frei E.F., Editors. Cancer Medicine. Hamilton: Decker, 2000.
[10] Kleef R., Jonas W.B., Knogler W., Stenzinger W., Fever, cancer incidence and spontaneous remissions,
Neuroimmunomodulation 2001
[11] Vander Vorst A, Rosen A, Kotsuka Y., RF/Microwave Interaction with Biological Tissues, Wiley–IEEE
Press, 2006.
[12] Van der Zee J., Heating the patient: a promising approach?, Ann Oncol 2002; 13: 1173–1184.
[13] A. Volta, On the electricity excited by the mere contact of conducting substances, Philos. Trans., 1800.
[14] Watmough D.J., Ross W.M., Hyperthermia: Clinical and scientific aspects, Blackie and Son, Glasgow
1986.
[15] Westermark F., Über die Behandlung des ulcerirenden Cervix carcinoma mittels Knonstanter Warme,
Zentralbl Gynkol 1898; 1335–1339.
82
XXI Sympozjum PTZE, Lubliniec 2011
INVERSE TASKS OF ELECTROMAGNETIC FIELD
UTILIZING SENSITIVITY ANALYSIS IN THE TIME DOMAIN
Konstanty M. Gawrylczyk
Higher School of Technology and Economics in Szczecin
Poland
Abstract: In last years, the methods for material structure recognition using the modern CAD technology have
made remarkable progress in achieving automatically optimum designs. The recognition and optimization of
structure, are done in order to fine tune the optimum layout. For this aim, the measurements of desired field
quantity for sufficient number of points have to be undertaken. Next, the inverse task, consisting in fact of
repeated forward tasks, should be defined. In the simplest case, the gradient-free minimization problem, e.g.
Hooke-Jeeves pattern search, may be posed. However, the calculation cost of the multiplied goal function
evaluations is very high, and so we prefer gradient-based methods, ensuring much better convergence. The paper
describes inverse task of recognition of electrical conductivity distribution, utilizing finite element method and
sensitivity analysis for obtaining of Jacobian. Two methods of sensitivity evaluation are shown, basing on usual
time-stepping and on semi-discrete analysis in the time-domain.
Keywords Electromagnetism, Finite element analysis, Numerical analysis
Problem definition
Figure 1. Conductive area, where the conductivity will be evaluated
Magnetic field, exciting eddy-currents in conductive area, is caused by the coil powered with
impulse current. The measurement coil may be translated to different positions, registering the
shape of induced voltage. Time-discretization of this voltage, done for different positions
provides large number of measurement data, which may be utilized by the optimizing
algorithm. Using non-harmonic excitation currents, we dispose with redundant number of
measurement data. From this reason, the algorithms for solution of over-determined equations
systems have to be adopted. Because of measurement errors, the task is often ill-posed. In this
case we propose application of regularization with singular value decomposition (SVD) of
equations matrix. As result we obtain conductivity distribution in finite elements of
83
XXI Sympozjum PTZE, Lubliniec 2011
conductive area. While the conductivity value inside finite elements remains constant,
exactness of the recognition depends strongly from mesh refinement.
Iterative algorithm
In order to clarify the iterative algorithm, suppose the inverse task is to identify the structure
of conductive material, and to that end with each of the C eddy current transducers were made
N measurements. Number N will mean number of discrete time moments for which there was
measured the transducer voltage with pulse excitation of a different shape. For the objective
function we can then use the following definition of quadratic error:
1
2
C
N
un(c ) un(c )
c 1
n 1
2
1
2
CN
2
uv uv ,
v 1
where index v replaces indices c and n: v = (c 1)·N + n .
To determine the corrections vector, the sensitivity analysis is used. We define the following
matrix called the sensitivity matrix S (obtaining of this matrix will be explained in full version
of paper):
In the simplest case, the matrix S may be a square matrix with
u1
u1
number of columns M = C·N. This condition is practically easy to
...
M meet, because we can always choose the appropriate number of
1
S ...
...
... frequencies or the number of discretization time points. Usually,
u
uC N taking into account the frequencies or time discretization points, is
C N ...
left to the methods of solving of over-determined equation systems,
M providing an excess of measurement data and resulting in the
1
matrix S in a rectangular form M < C·N.
The vector of conductivity corrections δγ can therefore be determined from the system of
equations:
S T S δγ S T u u , or from: S δγ u u u.
The first of these formulas, is a system of M linear equations with M unknowns, while the
second, system of C·N equations with M unknowns, ie over-determined system.
Recognition of conductivity distribution nearby crack
This example shows the exploitation of sensitivity knowledge to identify the conductivity
distribution inside the pipe wall. The eddy-current probe, consisting of three coils, moves
inside the pipe with increments of 2.5 mm. In each position, the probe is excited and the
voltage impulse in the measurement coil registered. For the purposes of simulation, this is
equivalent to 17 locations for the probe (q = 17). The measurement was simulated with the
help of FEM adding random 1% relative error. The search area consisted of 64 elements with
a conductivity of γ = 2·107 S/m (Fig. 2a). This means that, in every iteration step, there were
17 · 64 · 100 = 108 800 sensitivity values calculated providing gradient information for
iterative Gauss-Newton with TSVD algorithm. The conductivity distribution, as well as crack
shape, was correctly identified after 8 iterations.
84
XXI Sympozjum PTZE, Lubliniec 2011
Figure 2. Identification process: a) assumed distribution of conductivity,
b) initial distribution of conductivity, f) distribution after 8th iteration
References
[1] Gawrylczyk K.M., Kugler M. (2006) ―Time domain sensitivity analysis of electromagnetic quantities
utilizing FEM for the identification of material conductivity distributions‖, COMPEL, vol. 25, No. 3, pp.
589-598.
[2]
Gawrylczyk K.M., Kugler M. (2007), ―Sensitivity analysis of electromagnetic quantities by means of
FETD and semi-discrete method‖, XII International Symposium on Electromagnetic Fields in Mechatronics,
Electrical and Electronic Engineering (ISEF 2007), Prague, Czech Republic.
85
XXI Sympozjum PTZE, Lubliniec 2011
IDENTYFIKACJA POLA ELEKTROMAGNETYCZNEGO
W PRZESTRZENI POMIAROWEJ KOMORY GTEM
Aleksander Gąsiorski, Zdzisław Posyłek
Politechnika Częstochowska, Wydział Elektryczny
Komora GTEM (ang. Gigahertz Tranverse Electro-Magnetic) jest uniwersalnym narzędziem służącym między
innymi do prowadzenia badań w obszarach o równomiernym polu elektromagnetycznym typu TEM do
częstotliwości przekraczającej kilka GHz oraz do badania emisyjności urządzeń elektronicznych
i elektrycznych. Znajduje szczególne zastosowanie w badaniach z zakresu kompatybilności elektromagnetycznej.
W pracy przeprowadzono identyfikację pola elektromagnetycznego w przestrzeni pomiarowej komory GTEM
stosując metody obliczeniowe i pomiary praktyczne. Dla obliczenia wartości natężenia pola elektrycznego w
przestrzeni pomiarowej została zastosowana metoda stałego natężenia pola zalecana przez nomy. Znormalizowana
wartość składowej pionowej pola elektrycznego fali TEM w przestrzeni pomiarowej komory GTEM jest
wyznaczana z równania, gdzie wartość ta zależy od wymiarów geometrycznych komory i jej impedancji falowej.
Identyfikację pola w przestrzeni pomiarowej komory można przeprowadzić również pomiarowo. W pracy wyniki
obliczeń teoretycznych porównano z pomiarami praktycznymi i przeliczono na równoważne wyniki badań
poligonowych.
Jednoportowa komora TEM zwana komorą GTEM (ang. Gigahertz Transverse ElektroMagnetic) przeznaczona jest do badania emisyjności urządzeń elektronicznych i elektrycznych
oraz oddziaływania pola elektromagnetycznego na urządzenia elektryczne i elektroniczne w
zakresie częstotliwości przekraczającej kilka GHz. Została zaprojektowana w końcu lat
osiemdziesiątych przez Koenigsteina i Hansena [1] i stanowi rozwinięcie komory TEM, ze
względu na ograniczenia tej ostatniej w zakresie częstotliwości mikrofalowych. Jest ona
faktycznie współosiowym przewodnikiem o przekroju prostokątnym rozchodzącym się w
kształcie piramidy z punktu w wierzchołku którego, umieszczono wejście pomiarowe. Rolę
ekranu pełni metalowa obudowa komory, natomiast znajdująca się wewnątrz obudowy pozioma
płyta metalowa (zwana „septum”) pełni rolę przewodu wewnętrznego. Pomiędzy „septum” a
dolną ścianą obudowy komory znajduje się przestrzeń robocza, w której umieszczane są obiekty
poddawane testom. Podstawowym rodzajem pola elektromagnetycznego w takiej komorze jest
fala typu TEM (ang. Transverse Electro-Magnetic), w której wektor natężenia pola
elektrycznego E i wektor natężenia pola magnetycznego H są do siebie prostopadłe oraz
prostopadłe do kierunku rozchodzenia się fali [2,3]. Przy propagacji fali TEM w komorze GTEM,
składowa wektora pola elektrycznego wzdłuż osi y jest określone pomiędzy „septum” a podłogą
(obudową) komory z równania: Ey= U/h [V/m], gdzie h jest wysokością „septum” w miejscu
położenia środka badanego obiektu (EUT – ang. Equipment Under Test), U jest napięciem
zasilającym komorę.
Obciążenie 50 Ω
Przestrzeo
Ekran
y
y pomiarowa
Przewodnik
wewnętrzny
Port
zewnętrzny
(obudowa)
(septum)
EUT
x
Przestrzeo pomiarowa
Rys. 1. Schemat komory GTEM
86
Absorber
z
XXI Sympozjum PTZE, Lubliniec 2011
W konstrukcji komory zawarty został kompromis związany z rozdzieleniem rodzajów
obciążenia dla różnych zakresów częstotliwości. Dla niższych częstotliwości jako obciążenie
zastosowano specjalną matrycę rezystorową o wypadkowej rezystancji równej 50 []. Dla
wyższych częstotliwości rolę obciążenia pełni materiał absorpcyjny (piramidalne
absorbery) pokrywający tylną ścianę komory. Absorbery pochłaniają energię
promieniowaną przez badane urządzenie, eliminując tym samym zjawisko odbicia
płaskiej fali elektromagnetycznej od tylnej ściany komory.
Zgodnie z przyjętymi normami [6] badania obiektów promieniujących w komorach
GTEM sprowadza się do pomiaru mocy na wejściu komory dla kilku (zwykle trzech)
położeń obiektu badanego w jej wnętrzu czyli pomiędzy „septum” a dolną ścianą
obudowy. Pole elektromagnetyczne badanych urządzeń określa się najczęściej poprzez
ustawienie rzeczywistych obiektów badanych w co najmniej trzech różnych, wzajemnie
prostopadłych położeniach. Pozwala to na wyznaczenie pełnych charakterystyk
promieniowania elektromagnetycznego badanych obiektów.
Badanie urządzeń elektrycznych i elektronicznych poddawanych działaniu pola
elektromagnetycznego wysokiej częstotliwości przeprowadzane jest również w komorze
GTEM, która wtedy służy jako źródło pola elektrycznego wysokiej częstotliwości. Wtedy
dla komory GTEM określana jest przestrzeń pomiarowa wewnątrz komory przy założeniu
dokładności badawczej (zmiany wartości składowej pionowej wektora natężenia pola
elektrycznego). Fizycznie przestrzeń badawcza uzależniona jest od wielkości komory jak i
założonego dopuszczalnego spadku (zmiany) wartości składowej pionowej wektora natężenia
pola elektrycznego [5]. Znormalizowana wartość (to jest odniesiona do wartości pola
elektrycznego generowanego przez 1W mocy wejściowej) składowej pionowej y pola
elektromagnetycznego można w przybliżeniu wyznaczyć za pomocą zależności [4]:
m
cosh(
y)
2
2a cos( m x) sin( m ) J ( m y )
e0 y
Zc
0
m
a
2a
2
2a
m 1, 3, 5 sinh(
m
b)
2a
gdzie: m 1,3,5..., , [1/ m]; 2a [m] jest szerokością poprzecznego przekroju komory; b [m]
jest szerokością szczeliny (między „septum” a ścianą komory); x, y – położenie środka
badanego obiektu (EUT) dla określonej wartości z, [m]; Zc jest impedancją charakterystyczną,
J 0 x jest funkcją Bessela zerowego rzędu.
100
0,6
90
0,5
80
100MHz
0,4
Emax(dBuV/m)
Odległość od osi x
Obszar pomiarowy komory o zadanej dokładności eoy :
1dB
2dB
3dB
0,3
0,2
0,1
0
-0,24
-0,18
-0,12
-0,06
0
0,06
0,12
0,18
50
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0,5
Odległość od osi y
Odległość od osi y (oś symetrii septum) w metrach
Rys. 2. Obliczone granice obszaru komory
o określonym rozkładzie dokładności natężenia pola
30MHz
60
40
-0,5
0,24
60MHz
70
Rys. 3. Obliczony rozkład maksymalnego natężenia
pola w komorze przy mocy 0,1 W na jej wejściu
Wartość e0y jest to znormalizowana (to jest odniesiona do wartości pola elektrycznego
generowanego przez 1W mocy wejściowej) składowa wzdłuż osi y pola elektrycznego fali
87
XXI Sympozjum PTZE, Lubliniec 2011
TEM w przestrzeni pomiarowej. Znormalizowaną wartość składowej pionowej y pola
elektromagnetycznego można określić eksperymentalnie poprzez pomiar składowej pola
elektrycznego Ey [V/m] dla pustej komory w położeniu (x, y), odpowiadającemu położenia
środka badanego obiektu (EUT), przy znanej mocy Pi [W] na wejściu komory:
E ( x, y )
y
e0 y
,
m
P
i
Otrzymane wyniki pomiarowe powinny zostać odniesione do badań poligonowych [6], co
realizowane jest za pomocą kłopotliwych procedur przeliczeniowych. Przeliczone wielkości
pola elektromagnetycznego (komora – poligon) pozwalają porównać wartości otrzymane z
pomiarów w komorze z wielkościami pola elektromagnetycznego określanymi w normach [5].
90
80
Emax [dB(uV/m)]
70
60
50
40
Polar. pozioma
30
Polar. pionowa
20
10
0
0
10
20
30
40
50
60
70
80
90
100 110 120 130 140 150
Częstotliwość w MHz
Rys 4. Przeliczenie wartości Emax uzyskanych w komorze GTEM na wartości poligonowe dla różnych
polaryzacji fali elektromagnetycznej.
Wyniki identyfikacji pola elektrycznego generowanego w komorze GTEM przyprowadzone
za pomocą metody stałego natężenia pola oraz za pomocą metody pomiarowej dały zbliżone
wartości dla całego zakresu mierzonych częstotliwości.
Literatura
[1] Koenigstein D., Hansen D.; A new family of TEM-cells with enlarged bandwidth and optimized working
volume, 7th International Symposium and Technical Exhibition on Electromagnetic Compatibility, Zurich,
Switzeland, Mar. 1987, p. 127-132.
[2] Więckowski T. W.; Badanie kompatybilności elektromagnetycznej urządzeń elektrycznych i
elektronicznych, Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław 2001.
[3] Więckowski T.W., Jóskiewicz Z.M.; GTEM Cell in EMC Measurements, Summary, Proc. of the 13 th
International Symposium on EMC, Wrocław 1996, p. 390-393.
[4] Wilson P., Ma M.; Shielding measurements with a dual TEM cell, IEEE Trans. on Electromagnetic
Compatibility, vol. EMC-27, no. 3 Aug. 1985, p. 137-142.
[5] Woźnica T.; Wstępny pomiar zaburzeń radioelektrycznych w komorze GTEM z zastosowaniem analizatora
widma: Przegląd Elektrotechniczny, R. 86, 2010,Nr 3, s. 179-181.
[6] PN-EN 61000-4-20: 2007 Kompatybilność elektromagnetyczna (EMC), Metody badań i pomiarów,
Badania zaburzeń i odporności w falowodach TEM.
88
XXI Sympozjum PTZE, Lubliniec 2011
TRANSMISYJNA SYMETRYCZNA LINIA PASKOWA
JAKO UKŁAD WYMUSZAJĄCY JEDNORODNE
POLE ELEKTRYCZNE W ZAKRESIE CZĘSTOTLIWOŚCI
RADIOWYCH
Aleksander Gąsiorski, Zdzisław Posyłek
Politechnika Częstochowska, Wydział Elektryczny
W pracy przedstawiony został model transmisyjnej symetrycznej linii paskowej służącej do propagacji
poprzecznej fali elektromagnetycznej (TEM) generującej jednorodne pole elektryczne o ściśle określonej
wartości w celu prowadzenia wybranych badań kompatybilnościowych układów elektronicznych. Zastosowanie
dwuwymiarowego modelu obliczeniowego linii umożliwiło analizę pola elektromagnetycznego w sposób
uproszczony. Wychodząc z równań Maxwella wyprowadzono zależność na impedancję z uwzględnieniem
wszystkich składowych pojemności jednostkowej symetrycznej linii paskowej. Wyprowadzone zależności
posłużyły do budowy rzeczywistego modelu badawczego w postaci komory TEM w celu pomiarowej weryfikacji
wyznaczonych teoretycznie wartości składowej pola elektrycznego.
Obowiązujące ustawy związane z kompatybilnością elektromagnetyczną [7, 8] narzucają
producentom przeprowadzanie między innymi badanie układów elektronicznych oraz
urządzeń radiowych i telekomunikacyjnych oddziaływania zewnętrznego pola
elektromagnetycznego (o wartościach podanych w przepisach normujących). Najprostszym w
konstrukcji i najtańszym w produkcji urządzeniami generującymi równomiernie pole
elektromagnetyczne TEM są prowadnice falowe takie jak symetryczne trójprzewodowe linie
paskowe lub komory TEM. Ścisłe rozwiązanie zagadnienia symetrycznej linii paskowej dla
skończonych wymiarów jest stosunkowo trudne [1,3]. W symetrycznej linii paskowej (rys.1),
doskonale przewodzące zewnętrzne długie płyty metalowe umieszczone są równolegle
względem siebie w stałej odległości d[m]. W geometrycznym środku między płytami
zewnętrznymi umieszczono płaski, idealnie przewodzący przewód metalowy (elektrodę) o
szerokości w[m] i grubości t[m] otoczony dielektrykiem o przenikalności dielektrycznej
ε=ε0εr[F/m]. Tak zbudowany transmisyjny tor o parametrach rozłożonych stanowi linię
bezstratną.
y
C b/4
d
w
t płytaz
przewodząca
C p/2
C b/4
x
przewodnik
(elektroda)
Rys.1. Przekrój
poprzeczny symetrycznej
dielektryk
linii paskowej.
Rys.2. Pojemności jednostkowe cząstkowe
C b/4
C p/2
C /4
występujące
w schemacie
zastępczymblinii
paskowej symetrycznej.
ε=ε0εr
89
XXI Sympozjum PTZE, Lubliniec 2011
Pole elektromagnetyczne w linii paskowej opisują pierwsze i drugie równania Maxwella [5],
a przyjęty prostokątny układu współrzędnych (rys. 1) pozwala na takie usytuowanie
wektorów natężenia pola elektrycznego E [V/m] i natężenia pola magnetycznego H [A/m],
aby posiadały one tylko po jednej niezerowej zespolonej składowej odpowiednio E y i H x .
Można wykazać, że po przekształceniach równania Maxwella sprowadzają się do postaci
równań toru transmisyjnego [1]. Częstotliwości rozpatrywanej tutaj fali elektromagnetycznej
są poniżej częstotliwości odcięcia [2] fo = c/2w [Hz], gdzie c [m/s] jest prędkością światła.
Całkowita pojemność jednostkowa linii paskowej symetrycznej (rys.2) określona jest wzorem
Cp
C
2w
C2
4 b
Cb , gdzie Cb jest to jednostkowa pojemność brzegowa.
(d t )
2
4
2
Określenie impedancji charakterystycznej Z c dla linii paskowej symetrycznej pozwala na
podanie pojemności brzegowych Cb w funkcji ilorazów t/d oraz w/d:
r
t
w
1
(1 ) 4Z c 0 r [F/m]
t c
d
d
Z c (1 )
d
Problem określenia pojemności brzegowej Cb w transmisyjnej linii paskowej symetrycznej
sprowadza się, zależnie od posiadanych możliwości konstrukcyjnych, do doboru wielkości
geometrycznych (t/d) oraz (w/d). Dokładna analiza wartości pojemności brzegowej Cb
wymaga rozwiązania równania Laplace’a z odpowiednimi warunkami brzegowymi [1]. Jeżeli
grubość elektrody środkowej t jest pomijalnie mała, to dokładną wartość jednostkowej
pojemności brzegowej Cb . można otrzymać przez zastosowanie metody przekształceń
konforemnych, natomiast dla t>0 przy użyciu metod aproksymacyjnych [3, 4]. Komora TEM
(zwana komorą Crawforda) [2, 6], stanowi w zasadzie rozszerzoną, na odcinku przestrzeni
roboczej, linię paskową symetryczną. Zasila się ją z generatora wysokiej częstotliwości i na
wyjściu dołącza do niej obciążenie o wartości równej impedancji falowej komory. Wartość
natężenia pola elektrycznego Ey, w osi symetrii komory w przestrzeni roboczej pomiędzy
zewnętrzną górną ścianką przewodzącą a elektrodą środkową, wyznaczana jest z równania [2]:
Cb
Ey
2 Pn Z o
[V/m]
d
gdzie, Pn [W] jest mocą czynną fali elektromagnetycznej wydzieloną na impedancji
obciążenia, Zo [Ω] jest impedancją obciążenia w stanie dopasowania (równą impedancji
falowej komory TEM) a d [m] jest odległością pomiędzy zewnętrznymi poziomymi ścianami
komory.
Na podstawie przeprowadzonych rozważań, na poniższych rysunkach pokazano zmiany
jednostkowej pojemności brzegowej Cb w funkcji ilorazu w/d w zależności od: grubości
elektrody środkowej t (rys. 3), wartości względnej przenikalności elektrycznej wnętrza linii
paskowej εr (rys. 4) oraz od wybranych wartości impedancji charakterystycznych ZC.
90
XXI Sympozjum PTZE, Lubliniec 2011
t=1mm
εr=1
t=10mm
50
40
30
20
10
0
Cb[pF/m]
Cb[pF/m]
t=0,5mm
0,5
0,7
εr=5
120
100
80
60
40
20
0
0,2
0,9
εr=3
0,4
0,6
0,8
1
w/d
w/d
Rys.4. Wykres zmian jednostkowej pojemności
Cb w funkcji ilorazu w/d dla Zc=50[Ω], εr=1,
dla kilku wartości grubości paska t
Zc=48
Rys.3. Wykres zmian jednostkowej pojemności
brzegowej Cb w funkcji ilorazu w/d dla Zc=50[Ω],
t/d=0.001,
dla kilku wartości εr przenikalności
względnej wnętrza linii paskowej
Zc=50
Zc=52
Zc=75
70
Cb[pF/m]
60
50
40
30
20
10
0
0,2
0,4
0,6
0,8
1
w/d
Rys. 5. Wykres zmian jednostkowej pojemności brzegowej Cb w funkcji ilorazu w/d
dla t/d=0.001, εr=1, w zależności od wybranych wartości impedancji
charakterystycznych ZC.
W praktycznych zastosowaniach symetrycznych linii paskowych zwykle d>>t, natomiast
iloraz t/d wynosi ok. 0,001. Wówczas można przyjąć, że grubość przewodzącej elektrody
(paska środkowego) nie wpływa w sposób istotny na pojemność jednostkową Cb, której
wartość zdecydowanie zależy od ilorazu w/d. Wraz ze wzrostem ilorazu w/d wartość
pojemności jednostkowej linii paskowej maleje, szczególnie jeżeli dielektryk wypełniający
linię paskową ma εr>1. Z powyższego wynika, że największy wpływ jednostkowej
pojemności brzegowej Cb na parametry linii (impedancję charakterystyczną Zc) występuje
w powietrznej symetrycznej linii paskowej.
W komorze TEM występuje rozproszenie linii pola elektrycznego w pobliżu krawędzi elektrody
środkowej (na co wpływ ma pojemność brzegowa Cb). W związku z tym obszar badawczy, w
którym występuje jednorodne pole elektryczne ulega nieznacznemu zmniejszeniu.
Symetryczna linia paskowa w postaci komory TEM jest tanim urządzeniem w którym można
generować potrzebne pole elektryczne do badań niewielkich obiektów technicznych
elektronicznych i elektrycznych pod względem kompatybilności elektromagnetycznej.
91
XXI Sympozjum PTZE, Lubliniec 2011
Literatura
[1] Coren R. L.; Basic Engineering Electromagnetics, An applied approach, Prentice Hall, Englewood Cliffs,
N..J. 07632, 1989.
[2] Crawford M. R.; Generation of Standard EM Fields Using TEM Transmission Cells, IEEE Transactions on
Electromagnetic Compatibility, Vol. EMC-16, No. 4, November 1974, p.189-195.
[3] Grudziński E., Wadowski W.; Symetryczna linia paskowa jako wzorzec pola elektromagnetycznego,
Wiadomości Telekomunikacyjne Nr 10, 1979, s. 289-295.
[4] Panecki M., Zastosowanie zasady Babineta do określania parametrów układu zastępczego symetrycznej
linii paskowej, Polska Akademia Nauk, Instytut Podstawowych Problemów Techniki, Zakład Teorii
Łączności, Praca Nr 3, Warszawa - listopad 1960.
[5] Piątek Z., Jabłoński P.; Podstawy teorii pola elektromagnetycznego, WNT, Warszawa, 2010.
[6] Satav S. M., Agarwal V.; Do-it-Yourself Fabrication of an Open TEM Cell for EMC Pre-compliance, IEEE
EMC Society Newsletter, 2008, p. 66-71.
92
XXI Sympozjum PTZE, Lubliniec 2011
UKŁAD DO POMIARU WARTOŚCI ŁADUNKU
ELEKTRYCZNEGO TRANSFEROWANEGO
W CZASIE WYŁADOWAŃ ELEKTROSTATYCZNYCH,
DLA POTRZEB OCHRONY PRZECIWWYBUCHOWEJ
Zygmunt J. Grabarczyk
Centralny Instytut Ochrony Pracy – Państwowy Instytut Badawczy
Laboratorium Elektryczności Statycznej
Warszawa
Wyładowania elektrostatyczne (ESD) są przyczyną ok. 8, 5% notowanych na świecie
zapłonów atmosfer wybuchowych. Dlatego ochrona antyelektrostatyczna w strefach
zagrożenia wybuchem jest na terenie Unii Europejskiej obligatoryjna (Dyrektywa
1999/92/WE (ATEX USERS).
Ocena własności zapłonowych atmosfer wybuchów jest oparta na określeniu wartości energii
zgromadzonej w polu elektrostatycznym, jaka może być rozładowana w czasie wyładowania
elektrostatycznego i porównania jej z minimalną energią zapłonu MEZ (ang. MIE)
rozpatrywanej atmosfery. MEZ danej atmosfery jest równa minimalnej energii zgromadzonej
w polu elektrostatycznym kondensatora wzorcowego, powodującej przy jego iskrowym
rozładowaniu, zapalenie tej atmosfery przy optymalnym stężeniu paliwa (palnego gazu, par
cieczy palnej, aerozolu palnego lub pyłu palnego) w powietrzu atmosferycznym.
Elektrostatyczne wyładowania iskrowe zachodzą między dwoma obiektami przewodzącymi o
różnicy potencjałów nie mniejszej niż 300 V. W warunkach praktycznych zapobieganie tym
wyładowaniom jest stosunkowo łatwe i sprowadza się do elektrycznego połączenia (tzw.
mostkowania) i uziemienia wszystkich obiektów i przedmiotów przewodzących oraz ciała
pracowników w obrębie przestrzeni zagrożonych wybuchem. Energia zgromadzona w
pojemności układu dwóch przewodników wynosi W = CU2/2 = UQ/2 = Q2/2C. Mierząc
różnicę potencjałów U między dwoma obiektami przewodzącymi i ich wzajemną pojemność
można wyznaczyć wartość skumulowanej energii W i przez porównanie z MEZ, oszacować
ryzyko zapłonu.
Obecnie rośnie zainteresowanie równoważnym MEZ parametrem – minimalnym ładunkiem
zapalającym (ang. MIQ). Jest to minimalna wartość ładunku elektrycznego transferowanego
w czasie pojedynczego iskrowego wyładowania elektrostatycznego, w warunkach jak przy
wyznaczaniu MEZ. Zaletą MIQ w stosunku do MEZ jest znacznie mniejsza zależność jego
wartości od szerokości szczeliny międzyelektrodowej oraz napięcia zasilającego elektrody.
Najistotniejszą zaletą tej metody jest możliwość oceny ryzyka zapłonu przez wyładowania
jednoelektrodowe (wyładowania snopiaste różnych typów), zachodzące między
naelektryzowanym dielektrykiem a obiektem przewodzącym, gdzie nie jest możliwe
w sposób praktyczny wyznaczenie energii zgromadzonej w danym układzie dielektryk –
przewodnik, ani zdefiniowanie pojemności elektrycznej czy tez różnicy potencjałów. W tych
warunkach pomiar ładunku transferowanego w czasie wyładowania sprowokowanego
elektrodą kulombomierza jest jedynym skutecznym sposobem oceny ryzyka.
93
XXI Sympozjum PTZE, Lubliniec 2011
Schemat zastępczy układów pomiarowych pokazano na rys.1. Elektrodą skupiającą pole ES
jest metalowa kula o średnicy 25 mm. Przy zbliżaniu jej do odpowiednio silnie
naelektryzowanego obiektu, doprowadza się do wyładowania. Stosowane są dwa typy
rozwiązań elektrody pomiarowej, elektroda pełna (po prawej, rys. 1) i elektroda wydrążona
zawierająca wewnątrz kuli właściwą elektrodę przechwytującą ładunek (po lewej, rys. 1).
Obecnie trwa w środowisku specjalistów z dziedziny ochrony antyelektrostatycznej dyskusja
na temat poprawności wskazań obu rodzajów kulombomierzy. Rozwiązanie z wydrążoną
kulą, stosuje się w celu zaekranowania właściwej elektrody przechwytującej ładunek
i obecnie przeważa pogląd, ze jest to rozwiązanie poprawniejsze.
W obu metodach prąd wyładowania przepływa przez rezystor wzorcowy Ru, zbocznikowany
kondensatorem C0 o pojemności ok. 1-10 nF. Całkując spadek napięcia na tym rezystorze
wyznaczany jest ładunek przepływający w czasie wyładowania. W celu ograniczenia wpływu
rezystancji pomiarowej na proces wyładowania, jej wartość nie może być duża, co najwyżej
rzędu kiloomów. Powoduje to jednak szybkie rozładowywanie kondensatora C0 i konieczność
stosowania bardzo szybkich mierników spadku napięcia na dwójniku RC. Często stosuje się
tu oscyloskopy cyfrowe o paśmie, co najmniej 1 GHz. Ich wada jest stosunkowo mała
rozdzielczość (8-9 bitów).
Ce
Ce
Elektroda do
prowokacji ESD
Izolator
Elektroda do
prowokacji ESD
Kulombomierz
Kulombomierz
Ru
Ru
Qx
Qx
V
V
Co
Co
Cx
Cx
Rys. 1. Schemat zastępczy dwóch rozwiązań układów do pomiaru ładunku elektrycznego transferowanego w
czasie sprowokowanego wyładowania elektrostatycznego. Po lewej stronie układ z zaekranowaną elektrodą
pomiarowa, po prawej układ z elektrodą nieekranowaną.
Qx – ładunek ES skumulowany na powierzchni odizolowanego obiektu przewodzącego, C x – pojemność
elektryczna odizolowanego obiektu przewodzącego, względem ziemi, Ce – pojemność elektryczna między
odizolowanym obiektem przewodzącym a zbliżana do niego w celu spowodowania ESD elektroda
kulombomierza, C0 – pojemność wzorcowego kondensatora pomiarowego przechwytującego ładunek ES w
czasie wyładowania, Ru – rezystancja elektrody pomiarowej względem ziemi (równoległe połączenie rezystancji
upływu izolacji uchwytu elektrody, rezystancji pomiarowej i rezystancji wejściowej woltomierza)
Prezentowane urządzenie w znacznym stopniu eliminuje wady tych rozwiązań. Zbudowany
miernik ma postać jak na prawym schemacie rys.1, z tym, że jako C 0 zastosowano baterię
połączonych równolegle niskoindukcyjnych, niskostratnych kondensatorów. Ładunek
transferowany w czasie ESD jest przechwytywany przez ten kondensator i wyznaczany przez
pomiar spadku napięciu na tym kondensatorze. W przypadku zastosowania odpowiednich
izolatorów (tarflenowych) i woltomierza o rezystancji wejściowej rzędu 1012 Ω, uzyskując
stała czasu układu RC rzędu kilkudziesięciu tysięcy sekund, wartość ładunku zgromadzonego
w C0 jest bliska wartości ładunku transferowanego w czasie wyładowania. Stosując metodę
przekształceń Laplace’a, wykazano, że ładunek Qd transferowany w czasie wyładowania
przez plazmę iskry o rezystancji Rd i ładunek Qd przechwycony przez pojemność pomiarową
C0 wynoszą:
94
XXI Sympozjum PTZE, Lubliniec 2011
t
C Cx
C Cx
C0
C0
Qd id t dt Qx
exp 0
t Qx
exp 0
t
BR
BR
C
C
BR
d 0
d
0
x
d
0
C0 Cx
C0
C0Cx
Q0 Qx
1 exp
t , gdzie B C0Cx C0Ce CeCx
Ce
B
C0 Cx
BRd
t
Warunkiem uzyskania Q0 Qd jest zachowanie relacji między pojemnościami:
C0 >> Cx, C0 >> Ce. Przy spełnieniu tych warunków, ekranowanie elektrody pomiarowej
(wersja wydrążona) nie jest konieczne.
95
XXI Sympozjum PTZE, Lubliniec 2011
LAGRANGE'S METHOD FOR DERIVATION
AND SOLVING LONG LINE EQUATIONS
Barbara Grochowicz1, Witold Kosiński2
1
2
University of Technology, Opole
Polish-Japanese Institute of Information Technology, Warszawa
A new method for deriving telegraph equation has been recently proposed
by the authors which is based on a variational principle of stationary action. The main idea is
based on the observation, that for non-conservative systems and irreversible processes the
variations of partial timeand/or spatial derivatives of a field is different from the partial time
and/or spatial derivative of the variation of the field, respectively. It means that a noncommutativity of those operations is allowed. Hence from the same action integral containing
adensity of a Lagrangian and known for a conservative system, equations of a nonconservative system may be obtained by thevariational principle, provided particular form of
the non-commutativity of operations: variation and partial differentiation, is assumed. The
variational technique developed is then applied to initial boundary-value problems of
technical interest toreduce them to ordinary differential equations whose solutions can be
partially expressed in analytic closed form.
96
XXI Sympozjum PTZE, Lubliniec 2011
MAGNETICALLY NONLINEAR DYNAMIC MODEL
OF A SERIES WOUND DC MOTOR
Miralem Hadžiselimović1,2, Matic Blaznik2, Bojan Štumberger1,2
1
2
University of Maribor, Faculty of Energy Technology, Slovenia
University of Maribor, Faculty of Electrical Engineering and Computer Science,
Slovenia
Introduction
Series wound motors (SWMs) are used in drives with high initial torque characteristics (e.g.
electric trains, trams, escalators, conveyor belts etc.). It could be also found in many milling
machines, hand tools and household appliances, known as universal motor, supplied by either
AC or DC current. The main aim of this research is to provide a well working dynamic model
of a SWM, which ones includes magnetically nonlinear properties of iron core. The base of
this study is a simple magnetically linear model of SWM [1] which is developed for two
different types of magnetically nonlinear dynamic models. Both models have been developed
via mathematical derivation of equations which describes electrical and mechanical
subsystems of a SWM. Benefit of the developed magnetically nonlinear dynamic model is
capability to design and analyze control of a SWM [2].
Modeling of SWM
Magnetically nonlinear model of a SWM has been derived on the basis of differential
equations that describe the dynamics of motor’s electrical and mechanical subsystems [1]. In
the first place the linear model has been used, taking into account electrical (1) and
mechanical (2) set of equations, describing each subsystem:
di
u Rm Ra i Lm La Lma i (1)
dt
Where is u supplied voltage, i is current, R is winding resistance, L is winding inductance,
index m represents main field values and index a represents armature field.
uv
u
ua
La , Ra
Lv , Rv
i
Fig. 1. Electrical subsystem of SWM
Mechanical subsystem is being described by Newton’s law of inertia for rotating object:
97
XXI Sympozjum PTZE, Lubliniec 2011
d
me ml mf (2)
dt
Where is J rotor inertia, ω is angular speed, me is electromagnetic torque, ml is load torque
and mf is friction torque. The relationship between both subsystems can be obtained through
the balance of energy and mechanical power pout:
J
me
pout
2
i Lma (3)
Considering all three equations, the linear dynamic model of SWM can be expressed, which is
presented in Fig. 2.
Rm Ra
ml
u
di
dt
1
Lm L a
i
L ma
me
d
dt
1
J
friction
L ma i
L ma
Electrical subsystem
Mechanical subsystem
Fig. 2. Linear dynamic model of SWM
Proposed magnetically nonlinear dynamic models of a SWM
From the theory it is well known that magnetic iron cores used in electrical machines has
nonlinear magnetic characteristics. To consider magnetically nonlinear properties of used iron
core the static Ls and dynamic Ld inductances in proposed models are introduced.
Ψ
Ld
Ls
i
i
const.
i
Fig. 3. Static and dynamic inductances
In the full paper the complete sets of equations will be presented for both proposed
magnetically nonlinear models of a SWM. Procedure for determining characteristics of flux
linkages and parameters of electrical and mechanical subsystems will be described as well.
98
XXI Sympozjum PTZE, Lubliniec 2011
Conclusion
Simulation results of all three models (magnetically linear, magnetically nonlinear with static
inductances and magnetically nonlinear with dynamic inductances) will be presented and
compared with measured characteristics of the tested two-pole 1.5 kW series wound motor.
References
[1] D. Dolinar, G. Ńtumberger, Modeling and control of electromechanical systems, Faculty of electrical
engineering and computer science, Maribor, 2009.
[2] D. Igrec, A. Sarjań, A. Chowdhury, QFT-based robust velocity controller design for a SW-DC motor,
Przeglad Elektrotechniczny, 2011, vol. 87, iss. 3, p.p. 81-84.
99
XXI Sympozjum PTZE, Lubliniec 2011
ENVIRONMENTAL VALUES DETECTION MEASURING CELL
FOR EXPLOITATION OF WIND
AND SOLAR RENEWABLE ENERGY
Dalibor Igrec1, Amor Chowdhury2, Miralem Hadžiselimović3, Bojan Štumberger3
1
2
MARGENTO R&D d.o.o., Gosposvetska cesta 84, 2000 SI-Maribor, Slovenia,
University of Maribor, Faculty of Electrical Engineering and Computer Science
Slovenia
3
University of Maribor, Faculty of Energy Technology, Slovenia
Professional wind measurement and its accuracy and reliability are thus very important in
predicting economic viability before starting a wind farm. Even a small change in the wind
speed in a particular area can significantly affect the power yield efficiency of the wind
turbine [1]. Therefore, for the prospective development of a wind turbine, it is important to
consider the wind resources and information on how regularly the wind blows, the direction
of the wind, variations in wind speed and so on. On the basis of this information, performance
control mechanisms are integrated in the wind turbine.
Monitoring climate change and global agreements on influencing climate change with the use
of renewable energy sources have led to an increased global trend in the research of new
energy sources. Renewable energy sources include solar energy, wind energy, water energy
and biomass with geothermal energy. The EU’s environmental policy is the first important
step in reducing greenhouse gas emissions and thus establishing global balance. Today much
work is directed into the optimization usage of the renewable energy sources especially into
the optimization of wind farms usage where the environmental characteristics are crucial.
Before investment, it is necessary to acquire information on wind resources for an individual
area, which would justify building a wind farm.
Wind characteristics measurement can be implemented with commercial products, but they
are too expensive or sometimes unreliable. Therefore we have decided to develop our own
system equipment for measuring. This paper describes the basic properties of the
measurement system and our approach for measurements with presentation of the collected
data.
To measure wind characteristics, a data-capture system is needed [2]. This is an independent,
autonomous, and affordable measuring point:
Fig. 1. Measuring cell diagram
100
XXI Sympozjum PTZE, Lubliniec 2011
It consists of watertight housing with an appropriate IP protection, CPU with a memory to
store the measurements, GPRS communication, sensor input, internal battery and a solar cell.
The data-capture system provides advanced functionalities; it is easily installed in the field
and is in a low-energy-consumption mode most of the time. The solar cell enables complete
autonomy, meaning that the system can be installed in places with no external power supply.
Captured data are stored in internal memory and sent to the collection centre at predefined
time intervals. The data are sent with an internal GPRS modem. The internal battery enables
the operation of the device, and is charged by the connected solar cell. A connected solar cell
acts as the battery charger in the part of the day when the sunlight is at the level where the
solar cell can transmit the energy needed for charging. The system thus enables continuous
remote control of the device and the corresponding sensors.
The basis for monitoring wind resources is collecting data on wind speed and direction, and
air temperature and humidity. These data are basic for acquiring key information needed to
assess the reasonableness of establishing a wind farm.
The data are sent using a TCP/IP protocol. For this, a private APN channel (a protected
3DES/IPSEC channel) is used. This ensures that the data transfer is safe, and no additional
protection needs to be implemented in encrypting the sent data. On the server, a service is
installed that operates in the TCP/IP server mode and ―listens‖ to a specified port. This means
that it receives connections in parallel from several measurement stations. Simultaneous
connections of measurement stations are thus enabled, regardless of their set data-transfer
time intervals. The data are saved in an SQL database. Measurements from all measurement
stations are entered into the database. A web application is implemented on the server,
enabling registered users to access the measurement stations’ data. The data of any time
interval can be viewed graphically, in tables, or they can be exported to a local file for
processing in other specialized applications.
Fig. 2. System block diagram
The objective of this paper is to present the measurement system concept and its results
within a specified time period. Data will be presented in different forms of graphs; such as:
wind speed frequency, wind speed daily average, wind direction frequency, temperature
dependence.
References
1.
2.
AWS Scientific, Inc.: Wind Resource Assessment Handbook, April, 1997
D. Igrec, A. Chowdhury, M. Hadņiselimović, B. Ńtumberger, Measuring wind resources. Journal of energy
technology, March 2011, vol. 1.
101
XXI Sympozjum PTZE, Lubliniec 2011
APPROXIMATE BEM ANALYSIS
OF THIN MAGNETIC SHIELD OF VARIABLE THICKNESS
Paweł Jabłoński
Częstochowa University of Technology, Faculty of Electrical Engineering
Abstract
Magnetic shielding is often used to reduce the impact of external magnetic fields on a device
or its part. Analyzing magnetic field in the region protected by the shield usually requires
solving the field equations not only in the protected region itself, but also in the shield and its
vicinity. Besides, due to complexity of the problem’s geometry, numerical methods must be
often used. If the region surrounding the shield extends considerably (theoretically to the
infinity), the boundary element method (BEM) can be used [1, 2]. However, if the magnetic
shield is relatively thin, the problem of appropriate discretization of the shield’s surface
appears. In addition, some BEM integrals become nearly singular then, what leads to
unacceptable errors. Therefore, such shells must be then treated in a special way [3, 4]. One of
the approaches is to eliminate BEM equations for the thin shell by substituting them with an
approximate semi-analytical solution. This paper is a generalization of the approach presented
in work [4] for the case in which the magnetic shield has a variable thickness. For simplicity,
the considerations are limited to 2D problems.
A closed magnetic shield, Ω1, is placed in free space, Ω0, and encloses a protected region, Ω2
– Fig. 1. The external and internal surfaces of the shield are referred to as S1 and S2,
respectively. The magnetic region is considered to be very thin, whose thickness, d, can vary
from point to point. The relative permeability of the shield is assumed to be μr = const, while
the permeability of the protected region and the free space equals μ0.
Ω1
Bs
Ω0
Ω2
μ0
μr
μ0
S2
d
S1
Fig. 1. Problem diagram
Although this problem can be solved by means of scalar magnetic potential, the vector
magnetic potential can be used as well. In 2D problems, these two approaches have the same
level of complexity, because the vector magnetic potential has only a z-component. The
equations describing the field are as follows:
2 A( m) 0
with A(0) = A(1) on S1, A(1) = A(2) on S2, and
for Ωm , m 0, 1, 2 ,
102
(1)
XXI Sympozjum PTZE, Lubliniec 2011
A(0)
n
S1
1 A(1)
μr n
A( 2)
n
,
S1
S2
1 A(1)
μr n
,
(2)
S2
and A(0) → As far from the magnetic screen, where As is the z-th component of the magnetic
vector potential of externally applied magnetic field Bs.
The standard BEM procedure applied to this problem, after using the continuity
conditions, leads to the following system of equations
H1( 0)
(1)
H1
0
1
μr
G1( 0)
G1(1)
0
A1 A
(1) s
(1) Q1
G2
0 ,
A
2
(
2
)
1
G2 (1) 0
μr
Q2
0
0
H 2(1)
H 2( 2)
(3)
where Hl(m) and Gl(m) – the BEM matrices corresponding to Sl of Ωm, Al – nodal values of
potential A on Sl, Ql(m) – nodal values of ∂nA on Sl of Ωm, As – nodal values of As on S1.
The problem with the above equations is not only that some elements of matrices Hl(1) and
Gl(1) can be numerically very inaccurate (due to small value of d), but also that they form a
relatively large system. To avoid this, an approximate approach is proposed. By the Taylor
series up to the linear terms, values of potential A on S1 can be approximately expressed as a
linear function of values of potential A and its normal derivative on S2. Assuming a suitable
discretization, in which node i lying od S1 has a counterpart j lying on S2, one can obtain an
approximate relationship as follows:
A1(i1) A2( 2j)
A
di ,
n 2 j
(4)
where di is the magnetic shield’s thickness in node i. Such an approximation leads to the
following system of equations:
H1(0) μ1 G1(0) w
r
( 2)
1
G
2 w
μr
A1 As
,
H 2( 2) μ1 G2( 2) w A2 0
r
μ1 G1(0) w
r
(5)
where w is a diagonal matrix, whose elements are reciprocals of the shield’s thickness in
boundary nodes,
w diag( d1 , d1 , d1 ,...) .
1
2
3
(6)
System of Eqs. (5) contains twice less equations and unknowns than Eq. (3), and no nearly
singular integrals occur in it (for sufficiently regular boundary). More details and examples of
numerical calculations will be present in the full version of the paper.
103
XXI Sympozjum PTZE, Lubliniec 2011
References
[1] Jabłoński P.: Metoda elementów brzegowych w analizie pola elektromagnetycznego. Wyd. Pol. Cz.,
Częstochowa 2004.
[2] Brebbia C.A.: The boundary element method for engineers. Pentech Press, London 1978.
[3] Kurgan E.: Analiza pola magnetostatycznego w środowisku niejednorodnym metodą elementów
brzegowych. Rozprawy Monografie 81, Uczelniane Wyd. Nauk.-Dyd., Kraków 1999.
[4] Jabłoński P.: Elimination of thin magnetic shell in magnetic screen analysis by means of BEM, ZKwE 2010,
19-21.04.2010, ss. 39-40.
104
XXI Sympozjum PTZE, Lubliniec 2011
STANOWISKO Z SILNIKIEM SYNCHRONICZNYM
Z MAGNESAMI TRWAŁYMI PMSM DO BADANIA
UKŁADÓW NAPĘDOWYCH Z ELEMENTEM SPRĘŻYSTYM
Andrzej Jąderko
Politechnika Częstochowska, Wydział Elektryczny
Znane wady klasycznych silników prądu stałego spowodowały, że nowe rozwiązania w dziedzinie
napędów elektrycznych mogących spełniać wysokie wymagania dotyczące dynamiki poszukiwane są
wśród napędów prądu przemiennego. Najczęściej stosuje się w tych układach silniki indukcyjne
klatkowe, które charakteryzują się prostą konstrukcją, niskimi kosztami wytwarzania i łatwą
eksploatacją. Wysokie wymagania stawiane w ostatnich latach układom napędowym powodują
dynamiczny rozwój energoelektroniki, techniki mikroprocesorowej oraz metod sterowania.
Wraz z rozwojem technologii wytwarzania magnesów, coraz częściej z silnikami klatkowymi
konkurują silniki z magnesami trwałymi.
W niniejszym artykule przedstawiono badania układu napędowego z silnikiem synchronicznym z
magnesami trwałymi PMSM z wymiennym elementem sprężystym. Pokazano wpływ elementu
sprężystego oraz małego momentu bezwładności silnika na właściwości układu napędowego w
stanach dynamicznych.
Silniki z magnesami trwałymi PMSM, ich właściwości oraz metody sterowania opisane zostały
obszernie w pracy [1]. Znaczny wzrost zastosowań silników z magnesami trwałymi związany jest z
wieloma zaletami tych maszyn, do których można zaliczyć:
małe mechaniczne stałe czasowe (duży stosunek momentu maksymalnego do momentu
bezwładności);
dużą przeciążalność;
możliwość rozwijania momentu elektromechanicznego przy zerowej prędkości;
duży zakres regulacji prędkości;
duża równomierność obrotów przy bardzo małych prędkościach.
Powyższe zalety mają duże znaczenie w zastosowaniach silników PMSM w napędach, które
wymagają dobrych właściwości dynamicznych, na przykład w napędach precyzyjnych
serwomechanizmów, robotach, maszynach współrzędnościowych.
Silniki z magnesami trwałymi
PMSM wykorzystywane w napędach statków posiadają moce powyżej 1MW.
Moment bezwładności silnika PMSM jest 5 – 10 razy mniejszy niż silnika komutatorowego z
magnesami trwałymi o porównywalnej mocy. W związku z tym, przy zastosowaniu sterowania
wektorowego, silniki PMSM posiadają porównywalne z silnikami obcowzbudnymi właściwości
regulacyjne i przy tym znacznie lepsze parametry dynamiczne.
Małe mechaniczne stałe czasowe silników PMSM, będące niewątpliwie ich zaletą, stanowią poważną
wadę w napędach o dużym zakresie regulacji prędkości, a także w układach o zmiennym momencie
obciążenia na wale oraz zmiennym momencie bezwładności obciążenia. W takich aplikacjach istnieje
konieczność zastosowania regulatorów adaptacyjnych.
W większości układów napędowych zakłada się sztywność elementów przeniesienia momentu tj.
wałów, przekładni, sprzęgieł. Jednak istnieje grupa napędów, w których nie można pominąć
odkształceń sprężystych elementów mechanicznych. Nieuwzględnienie tych zjawisk wpływa
negatywnie na przebieg procesu technologicznego oraz wzrost naprężeń w elementach układu, co
prowadzi do skrócenia żywotności napędu oraz powstawania uszkodzeń. Oddziaływanie elementu
sprężystego objawia się oscylacjami prędkości obrotowej w stanach dynamicznych układu.
105
XXI Sympozjum PTZE, Lubliniec 2011
Metody sterowania układów napędowych z uwzględnieniem oddziaływania elementów sprężystych
były opisywane w wielu pracach. Znane są zastosowania regulatorów z wykorzystaniem logiki
rozmytej, czy sieci neuronowych [2], [3], [4]. Duża dynamika silnika synchronicznego z magnesami
trwałymi PMSM w przypadku napędu z elementem sprężystym powoduje powstawanie dodatkowych
zakłóceń w stanach przejściowych układu, w tym rezonansów mechanicznych.
Stanowisko badawcze składa się z następujących elementów:
przemiennik częstotliwości o dwukierunkowym przepływie energii, 11kW, typu
MMB011PMSM [5] z układem sterowania zrealizowanym w oparciu o procesor sygnałowy
ADSP SHARC oraz układy logiki programowalnej FPGA;
silnik synchroniczny z magnesami trwałymi produkcji KOMEL, IPMSg132S4, 4kW, 3x400V,
7,5A, 1500obr/min z przetwornikiem obrotowo – impulsowym (enkoderem) do pomiaru
prędkości i kąta skręcenia wału;
obciążenie w postaci prądnicy prądu stałego produkcji ELMOR, PKMa44a/117 4,6 kW, 20A,
230V, 1450obr/min zasilanej z dwukierunkowego przekształtnika typu MMB011DC [6] z
możliwością wymuszenia zadanego momentu obciążenia. Na wale prądnicy przymocowany
jest drugi enkoder do pomiaru kąta skręcenia wału;
Budowa zestawu elektromaszynowego umożliwia zastosowanie wymiennych elementów sprężystych
w postaci wałków o długości 1m i średnicach od 8mm do 30mm. Istnieje również możliwość
zmontowania dodatkowych mas wirujących w celu zwiększenia momentu bezwładności obciążenia.
Zestaw elektromaszynowy użyty do badań pokazano na rysunku 1.
Rys. 1. Widok zestawu elektromaszynowego użytego do badań
Przemiennik częstotliwości [2] zbudowany jest z dwóch, połączonych obwodem pośredniczącym,
falowników napięcia. Wejściowy falownik od strony sieci odpowiedzialny jest za kontrolę napięcia w
obwodzie pośredniczącym. Wyjściowy falownik od strony maszyny odpowiedzialny jest za
sterowanie pracą maszyny. Takie połączenie falowników umożliwia pracę w czterech ćwiartkach
układu współrzędnych momentu w funkcji prędkości obrotowej maszyny. Sterowanie pracą maszyny
synchronicznej zrealizowano z zastosowaniem metody z pośrednim wektorowym sterowaniem
prądem stojana. Wykorzystano tu znaną zależność, gdzie moment elektromagnetyczny silnika
synchronicznego PMSM może być przedstawiony jako iloczyn wektora strumienia skojarzonego
wirnika i wektora prądu stojana [1].
Badania eksperymentalne wykonano dla 4 średnic wałków sprężystych. Zastosowano tez dodatkowe
masy wirujące w celu zwiększenia momentu bezwładności obciążenia. Przeprowadzono kilkadziesiąt
prób pracy napędu dla różnych wartości momentu obciążenia i na biegu jałowym. Na rysunkach 2a i
2b pokazano przebiegi czasowe zmiennych stanu dla różnych średnic wałków sprężystych.
106
XXI Sympozjum PTZE, Lubliniec 2011
Zastosowano następujące oznaczenia zmiennych: imaA – prąd fazy A w amperach, um0aV – napięcie
fazy A w woltach, OmegaF – wartość zmierzona prędkości po odfiltrowaniu w jednostkach
względnych.
Na rysunku 2a przestawiono przebieg nawrotu silnika dla momentu obciążenia równego 80% przy
średnicy wałka sprężystego 30mm, a na rysunku 2b przedstawiono przebieg nawrotu dla momentu
obciążenia 80% z zamontowaną dodatkową masą wirującą przy średnicy wałka sprężystego 8mm.
Eksperymenty wykazały duży wpływ oddziaływania elementu sprężystego oraz momentu
bezwładności obciążenia na właściwości układu napędowego w stanach dynamicznych. Wahania
prędkości w krańcowym przypadku wałka sprężystego o najmniejszej średnicy dochodzą przy
nawrocie do 15%. Wahania te powodują powstawanie silnego zakłócenia, które nie jest możliwe do
zniwelowania przez klasyczny układ regulacji o stałych współczynnikach.
a)
b)
ImaA
ImaA
Um0aV
Um0aV
OmegaF
OmegaF
Rys. 2. Przebieg nawrotu napędu pod obciążeniem 80% dla średnicy wałka sprężystego a) d = 30mm, b) d =
8mm z zamontowaną dodatkową masą wirującą, t [ms]
Literatura
[1] Zawirski K., Sterowanie silnikiem synchronicznym o magnesach trwałych, Wydawnictwo Politechniki
Poznańskiej, (2005), Poznań
[2] Gierlotka K., Układy sterowania napędów elektrycznych z elementami sprężystymi, Wydawnictwo
Politechniki Śląskiej, (1992), Gliwice
[3] Gierlotka K., Michalak J., Zastosowanie logiki rozmytej w układach napędowych z połączeniami
sprężystymi, Materiały konferencji PPEE’2000, (2000), ss. 361-366, Wisła
[4] Orłowska-Kowalska T., Szabat K., Rakoczy S., Zastosowanie sieci neuronowych do estymacji zmiennych
stanu układu z połączeniem sprężystym, Materiały konferencji SENE’2005, (2005), ss. 559-565, Łódź
[5] Opracowanie zakładowe, Przemiennik częstotliwości MMB011 PMSM, Instrukcja obsługi, MMB Drives
Sp. z o.o., (2009), Gdańsk
[6] Opracowanie zakładowe, Przemiennik częstotliwości MMB011DC, Instrukcja obsługi, MMB Drives Sp.
z o.o., (2009), Gdańsk
107
XXI Sympozjum PTZE, Lubliniec 2011
ZASTOSOWANIE ELEKTROCHEMICZNEJ SPEKTROSKOPII
IMPEDANCYJNEJ DO OCENY ODPORNOŚCI
KOROZYJNEJ STOPU NI-TI
Marcin Kaczmarek, Witold Walke, Zbigniew Paszenda
Politechnika Śląska, Instytut Materiałów Inżynierskich i Biomedycznych,
Gliwice
Wprowadzenie
Stale Cr-Ni-Mo, stopy tytanu oraz stopu kobaltu stanowią podstawowe grupy biomateriałów
metalowych. Jednakże współczesna technika stawia coraz większe wymagania materiałom
konstrukcyjnym, które dotyczą ich niezawodności, większej wytrzymałości, czy też
poszukiwania nowych, nieznanych własności, które mogą poprawić parametry istniejących
już rozwiązań. Dlatego w ostatnich latach obserwuje się wzmożone zainteresowanie stopami
Ni-Ti jako biomateriałami. Zespół szczególnych własności tych stopów, jak zjawisko pamięci
kształtu oraz nadsprężystość, pozwala na bezpieczne zastosowanie ich w praktyce klinicznej.
Rozważając stopy Ni-Ti jako biomateriały, należy mieć na uwadze, iż muszą one posiadać
szereg własności użytkowych, zarówno w odniesieniu do własności mechanicznych,
fizykochemicznych, jak również biologicznych. Podstawowym kryterium przydatności stopu
Ni-Ti implanty jest biokompatybilność. Jest ona w głównej mierze związana z własnościami
fizykochemicznymi powierzchni implantu, które powinny być dostosowane do cech
środowiska człowieka. Stop Ni-Ti wprowadzony do takiego układu nie może powodować
zmian składu chemicznego otaczającej go tkanki, nieodwracalnych uszkodzeń struktury
białek, jak też nie powinien inicjować procesu zanikania tkanki, czy też reakcji toksycznych i
immunologicznych. W celu ograniczenia tych niekorzystnych zjawisk ustalono warunki
wytwarzania warstw pasywnych na powierzchni zaproponowanego biomateriału.
Wytworzenie warstwy pasywnej wymagało odpowiedniego przygotowania powierzchni, tj.:
obróbka wibracyjna oraz polerowanie elektrochemiczne. Tak przeprowadzona obróbka
powierzchniowa stopu Ni-Ti zagwarantowała odpowiednią chropowatość powierzchni (Ra
0,16m).
Celem przeprowadzonych badań było określenie przydatności poszczególnych wariantów
obróbki powierzchniowej dla poprawy odporności korozyjnej stopu Ni-Ti z wykorzystaniem
elektrochemicznej spektroskopii impedancyjnej.
Materiał i metody
Do badań wytypowano stop Ni-Ti o powierzchni szlifowanej, polerowanej elektrochemicznie
oraz polerowanej elektrochemicznie i spasywowanej chemicznie. W celu określenia wpływu
poszczególnych metod obróbki powierzchniowej na własności elektrochemiczne stopu
przeprowadzono badania z wykorzystaniem spektroskopii impedancyjnej. Pomiary
przeprowadzono z wykorzystaniem systemu pomiarowego AutoLab PGSTAT 302N
wyposażonego w moduł FRA2. Zastosowany układ pomiarowy umożliwił prowadzenie badań
w zakresie częstotliwości 104 ÷ 10-3Hz. Badania przeprowadzono w alternatywnym roztworze
108
XXI Sympozjum PTZE, Lubliniec 2011
symulującym płyny fizjologiczne człowieka w temperaturze T = 37 ±1C. W badaniach
wyznaczono impedancyjne widma układu i opasowano uzyskane dane pomiarowe do układu
zastępczego. Na tej podstawie wyznaczono wartości liczbowe oporności R i pojemności C
analizowanych układów. Widma impedancyjne badanego układu przedstawiono w postaci
diagramów Nyquista dla różnych wartości częstotliwości oraz w postaci diagramów Bode’go.
Otrzymane spektra EIS interpretowano po dopasowaniu metodą najmniejszych kwadratów do
zastępczego układu elektrycznego. Dobór tej metody umożliwił scharakteryzowanie
impedancji granicy faz Ni-Ti – warstwa powierzchniowa – roztwór Ringera na drodze
aproksymacji danych impedancyjnych za pomocą modelu elektrycznego obwodu
zastępczego.
Wyniki badań
W pracy przeprowadzono badania elektrochemicznej spektroskopii impedancyjnej, które są
liniowym pomiarem elektrycznej odpowiedzi badanego materiału metalowego na pobudzenie
elektromagnetycznym sygnałem w szerokim paśmie częstotliwości. EIS jest powszechnie
stosowanym testem do prób korozyjnych i elektrochemicznych. Dzięki analizie uzyskanych
wyników uzyskujemy istotną informację o właściwościach fizykochemicznych badanego
stopu. W ramach tego badania dla każdej próbki zarejestrowano dwa wykresy: wykres
Nyquista (|Z|=f1(ω) i Ф=f2(ω) gdzie Z(ω)=ZjФ) oraz wykres Bode'ego (Z’=f(Z’’), gdzie
Z(ω)=Z’+jZ’’), które pozwoliły na właściwą interpretację wyników. Przeprowadzone badania
umożliwiły bezpośrednie porównanie zachowania się rzeczywistego obiektu z jego układem
zastępczym, który jest modelem odnoszącym się do fizycznie realizowanej impedancji.
W badaniach wyznaczono widma impedancyjne dla próbek o powierzchni szlifowanej,
polerowanej elektrochemicznie oraz polerowanej elektrochemicznie i spasywowanej
chemicznie. Stwierdzono, że dla próbek o powierzchni jedynie szlifowanej najlepsze
dopasowanie eksperymentalnych widm impedancyjnych uzyskuje się, stosując elektryczny
obwód zastępczy złożony z dwóch kolejno następujących po sobie równoległych układów
elementu stałofazowego (CPE – Constans Phase Element) połączonego z oporem przejścia i
oporem przy wysokich częstotliwościach, który może być przypisany omowemu oporowi
elektrolitu. Dla próbek po procesie polerowania elektrochemicznego z równoległego układu
elementu stałofazowego połączonego z oporem przejścia jonów przez granicę faz elektroda –
roztwór i oporu przy wysokich częstotliwościach, który może być również przypisany
oporowi elektrolitu. W przypadku próbek o powierzchni polerowanej elektrochemicznie i
spasywowanej chemicznie z trzech kolejno następujących po sobie równoległych układów
elementu stałofazowego połączonego z oporem elektrolitu w porach, oporem przeniesienia
ładunku na granicy faz, oporem warstwy pasywnej oraz z oporem przy wysokich
częstotliwościach, który może być przypisany omowemu oporowi elektrolitu.
Uzyskane wyniki jednoznacznie wskazują, iż uzasadnionym jest zastosowanie procesu
polerowania elektrochemicznego oraz pasywacji chemicznej jako obróbki ostatecznej
powierzchni stopu Ni-Ti dla poprawy jego odporności korozyjnej.
109
XXI Sympozjum PTZE, Lubliniec 2011
MONOLITHIC MODEL OF INDUCTION HEATING
OF CYLINDRICAL NONMAGNETIC BILLETS
ROTATING IN A SYSTEM OF PERMANENT MAGNETS
Pavel Karban, František Mach, Ivo Dolezel
University of West Bohemia, Faculty of Electrical Engineering
Czech Republic
Induction heating of cylindrical nonmagnetic (mostly aluminum) billets by their rotation in a
time invariable magnetic field produced by a system of fixed permanent magnets belongs to
promising heat-treatment technologies. Its basic advantage (in comparison with classical ways
of induction heating using inductors) consists in the absence of field windings and
corresponding Joule losses in them.
The first study of the process (from both theoretical and experimental viewpoints) was
presented in [1]. The analyzed system consisted of four permanent magnets placed
symmetrically in a magnetic circuit whose cross-section was rectangular. Now the
investigated system (see Fig. 1) is more general. The number of permanent magnets is n
n
( n being an even number) and the sum of their cross sections
Si
is always the same. The
i 1
aim of the paper is to find for the given angular velocity of the billet the most
advantageous value of n , for which the billet is heated to the required average temperature in
the shortest time possible.
1
2
1
2
n
3
3
4
k
5
Fig. 1. Cylindrical nonferromagnetic ingot rotating in a system of permanent magnets:
1–magnetic circuit, 2–permanent magnets, 3–thermal insulation, 4–air gap, 5–rotating billet
110
XXI Sympozjum PTZE, Lubliniec 2011
The continuous mathematical model of the problem consists of two partial differential equations
describing the distribution of magnetic and temperature fields in the system. The first one,
describing the distribution of the magnetic vector potential A , may be written in the form
1
(1)
curl curl A H c v curl A 0 ,
where is the electrical conductivity, v is the local velocity of rotation, and H c is the
coercive force of the permanent magnets. The sufficiently distant artificial boundary is
characterized by the Dirichlet condition A 0 . The temperature field obeys the equation
T
(2)
div gradT cp
v grad T pJ ,
t
where is the thermal conductivity, is the specific mass, and cp denotes the specific heat
at the constant pressure. Finally, the symbol pJ denotes the time average internal sources of
2
heat (the specific Joule losses) determined from the formula pJ J eddy / , where J eddy is
the eddy current density given by the relation J eddy v curl A . All physical parameters of
the system are generally functions of the temperature.
The numerical solution of both equations is carried out by a fully adaptive higher-order finite
element method in the monolithic formulation, using our own library Hermes and user
interface Agros. A short description of the algorithm of the numerical solution follows:
First, equations (1) and (2) are reformulated in the sense of the weak solution. The magnetic
vector potential A is solved on an automatically adapted higher-order finite element mesh.
The obtained solution is subsequently used for a time-dependent computation of the
temperature field. The mesh for its computation is different from the mesh used for the
magnetic field. At each time level, optimal meshes are obtained automatically by independent
adaptive processes. Curvilinear interfaces are modeled using curved elements.
The left part of Fig. 2 shows an aluminum billet of diameter 0.1 m rotating at a velocity of
1500 rpm in a system of 12 permanent magnets. The axial length of the magnets is 0.5 m.
The magnetic circuit is manufactured of carbon steel CSN 12 040, permanent magnets NdBFe
are of type VMM10 (cross section of one magnet is 20 10 mm, Br 1.28 T, r 1.11 ).
Fig. 2. Left: Cylindrical aluminum billet rotating in a system of 12 permanent magnets (indicated are the force
lines). Right: time evolution of the temperature in the axis of the billet (full line) and on its surface (dashed line)
111
XXI Sympozjum PTZE, Lubliniec 2011
Acknowledgment
This work was supported by the European Regional Development Fund and Ministry of
Education, Youth and Sports of the Czech Republic (project No. CZ.1.05/2.1.00/03.0094:
Regional Innovation Centre for Electrical Engineering – RICE) and by Grant projects GACR
P102/11/0498 and GACR P102/10/0216.
References
[1] P. Karban, F. Mach, I. Dolezel: Induction Heating of Nonmagnetic Cylindrical Billets by Rotation in
Magnetic Field Produced by Static Permanent Magnets. Przeglad Elektrotechn. 86(12), 2010, pp. 53–56.
112
XXI Sympozjum PTZE, Lubliniec 2011
NOWY KIERUNEK W OCENIE NARAŻENIA NA POLE
ELEKTROMAGNETYCZNE W ŚRODOWISKU PRACY.
PROJEKT DOZYMETRU MIKROFALOWEGO
Jarosław Kieliszek, Jaromir Sobiech, Wanda Stankiewicz
Wojskowy Instytut Higieny i Epidemiologii, Zakład Ochrony Mikrofalowej
Warszawa
Zasady oceny narażenia personelu na pole elektromagnetyczne w środowisku pracy są ściśle
określone w prawodawstwie krajowym. Określa je norma PN-T-06580-3:2002 Ochrona
pracy w polach i promieniowaniu elektromagnetycznym o częstotliwości od 0 Hz do 300
GHz. Część 3: Metody pomiaru i oceny pola na stanowisku pracy. Norma zakłada, że
podstawą oceny narażenia na pole elektromagnetyczne jest wyznaczenie dozy rzeczywistej
oraz wskaźnika ekspozycji dla dozy rzeczywistej na stanowisku pracownika.
Ze względu na charakter wykonywanej pracy w zasięgu występowania pola
elektromagnetycznego, np. praca dorywcza, brak stałego stanowiska pracownika, istnieją w
wielu przypadkach trudności w wiarygodnym wyznaczanie tych parametrów, ze względu na
trudności z określaniem rzeczywistego czasu przebywania w polu elektromagnetycznym.
Trudności takie występują również w przypadku stanowisk laboratoryjnych,
niestandardowych. Nie ma wówczas możliwości określenia wcześniejszego rzeczywistego
czasu pracy w polu elektromagnetycznym. Wiarygodne dane są dostępne wówczas dopiero
po ekspozycji. Rozwiązaniem tego problemu byłoby stosowanie przez pracowników
indywidualnych
dozymetrów
pól
elektromagnetycznych/ekspozycji
na
pole
elektromagnetyczne. Jednak to tej pory, ze względu na trudności techniczne, prace nad
takimi dozymetrami nie zostały zakończone sukcesem.
Specyfika pracy urządzeń stosowanych w resorcie obrony narodowej oraz zakres
wykonywanych przez uprawniony perlonej prace przy takich urządzeniach powoduje, ze
problematyka wiarygodnej oceny narażenia na pola elektromagnetyczne personelu stwarza
istotne trudności a czasami jest wprost niemożliwa.
Prace nad modelek koncepcyjnym takiego urządzenia zostały, w ramach projektu
badawczego MNiSZW, zapoczątkowane przez Zakład Ochrony Mikrofalowej Wojskowego
Instytutu Higieny i Epidemiologii w 2007 roku. Prace prowadzone są przy udziale
podmiotów zajmujących się metrologią i analizą pól elektromagnetycznych. W ramach prac
analitycznych przyjęto, że:
opracowywany dozymetr będzie miał na tym etapie charakter dozymetru środowiska
pracy, a nie dozymetru indywidualnego;
w wariancie podstawowym będzie posiadał częstotliwościowy zakres pracy typowy
dla urządzeń radiolokacyjnych stosowanych w resorcie obrony narodowej;
w wariancie rozwojowym będzie testowana możliwości obniżenia analizowanych
częstotliwości lub stworzenia układu składającego się z kilku urządzeń detekcyjnych,
prowadzących analizę jednocześnie.
Wygląd ogólny dozymetru mikrofalowego przedstawia fotografia 1.
113
XXI Sympozjum PTZE, Lubliniec 2011
Fot. 1. Wygląd ogólny dozymetru
W skład opracowanego dozymetru wchodzą:
urządzenie detekcyjne promieniowania elektromagnetycznego (UD) i jego konwersji
na postać cyfrową wraz z urządzeniem transmisji,
komputer klasy PC o wzmocnionej konstrukcji (wilgotność, zapylenie, wstrząsy)
z systemem Windows XP i oprogramowaniem do obsługi urządzenia detekcyjnego,
oraz oprogramowaniem do analizy dozy a także wskaźnika ekspozycji za wybrane
odcinki czasu.
Dozymetr umożliwia ocenę warunków ekspozycji w następujących zakresach:
• urządzenie detekcyjne UD 30:
zakres analizowanej częstotliwości – 100 MHz – 2 GHz;
zakres pomiaru natężenie pola elektrycznego – 0,5V/m do 500V/m;
• urządzenie detekcyjne UD 9:
zakres analizowanej częstotliwości – 1 GHz - 10 GHz;
zakres pomiaru natężenie pola elektrycznego – 5V/m do 3000 V/m.
Urządzenie może pracować w jednym z dwóch trybów pracy:
tryb współpracy z PC, gdzie urządzenie detekcyjne jest podłączone w trakcie pomiaru
poprzez łącze USB z PC i transmituje na bieżąco wyniki pomiarów (rysunek 2);
tryb autonomiczny, gdzie urządzenie detekcyjne po ustawieniu parametrów pomiaru
jest odłączane od PC a start pracy następuje po ponownym włączeniu zasilania
urządzenia.
Wyniki pomiarów są gromadzone w pamięci urządzenia skąd mogą być odczytane po
ponownym podłączeniu do komputera. Zgromadzona baza danych pomiarowych pozwala na
prowadzenie oceny narażenia od jednego źródła promieniowania jak również od kilku źródeł.
114
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 2. Widok ogólny roboczego okna oprogramowania
Zgromadzone dane pomiarowe pozwalają na analizę wielkości występującego na stanowisku
pomiarowym natężenia pola elektromagnetycznego w czasie 8 godzin, tzn. prowadzenie
monitoringu stanowiskowego. Na podstawie uzyskanych danych możliwe jest określenie
dopuszczalnego czasu ekspozycji dla pola elektromagnetycznego o jednej częstotliwości jak
również dla pól złożony, składających się ze źródeł o wielu częstotliwościach. Szacowanie
dopuszczalnego czasu pracy realizowane jest w sposób dynamiczny, z uwzględnieniem zmian
bieżących wielkości natężenia pola elekromagnetycznego. Wprowadzenie funkcji sygnalizacji
założonego wcześniej progu ostrzegania, pozwoli na stosowanie dozymetru jako analizatora
rzeczywistych (zmiennych w czasie) ekspozycji. Przejściowe z systemu wyłącznie
bezpośrednich pomiarów natężenia pola elektromagnetycznego na stanowisku pracownika i
szacowaniu czasu narażenia na system mieszany, wprowadzający pomiary dozymetryczne,
wydaje się rozwiązaniem optymalnym. W sytuacjach szczególnych wyniki takie będą po
prostu bardziej wiarygodne.
115
XXI Sympozjum PTZE, Lubliniec 2011
BADANIA DRGAŃ SILNIKÓW WRZECIONOWYCH
PAMIĘCI MASOWYCH
Wojciech Kołton, Tomasz Trawiński
Politechnika Śląska, Wydział Elektryczny,
Katedra Mechatroniki
Silniki wrzecionowe pamięci masowych to bezszczotkowe silniki prądu stałego wzbudzone
magnesami trwałymi z wirnikami zwykłe trwale połączonymi z wrzecionem (na którym
osadzane są nośniki danych – talerze pamięci magnetycznych lub płyty CD/DVD pamięci
optycznych). W ostatnich latach obserwuje się szczególnie silny wzrost pojemności pamięci
masowych – szczególnie magnetycznych. Jednym z istotnych czynników utrudniających
wzrost gęstości danych są bicia i drgania systemu wrzecionowego. Bicia systemu
wrzecionowego powodują względne zmiany położenia ścieżek względem głowic w czasie
zapisu lub odczytu danych [1 – 5]. Ten niekorzystny wpływ musi być kompensowany przez
system pozycjonowania głowic [1]. Przyczynami bić i drgań systemu wrzecionowego są
niedokładności w wykonaniu łożysk kulkowych (luzy, mikro i makrofalistość bieżni,
uszkodzenia elementów tocznych itp.) lub hydrodynamicznych, których intensywność może
być potęgowana przez nierównomierny naciąg magnetyczny generowany przez obracające się
magnesy trwałe wirnika (powodujące czasowe i przestrzenne zmiany w obciążeniu
promieniowym i osiowym łożysk).
Bicia systemu wrzecionowego zwykle klasyfikowane są w następujących dwóch grupach,
jako bicia powtarzalne (z ang. Repeatable Runout – RRO) i bicia niepowtarzalne (NonRepeatable Rounout – NRRO) [1 – 4], zbiór tych bić to całkowite bicia mierzalne (z ang.
Total Indicated Runout – TIR), co symbolicznie przedstawiono na rys.1.
Całkowite bicia
mierzalne
TIR
Bicia
powtarzalne
RRO
Bicia
niepowtarzalne
NRRO
Rys. 1. Podział bić systemu wrzecionowego
Celem autorów jest dokonanie podziału bić, zarejestrowanych na prototypowym stanowisku
badawczym, na bicia powtarzalne i niepowtarzalne w dziedzinie częstotliwości i dziedzinie
czasu, oraz reprezentacja bić przy pomocy hodografów przemieszczeń.
Przykładowe bicia TIR w dziedzinie czasu przedstawia rys. 2, a w dziedzinie częstotliwości
rys. 3.
116
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 2. Przebieg bić silnika wrzecionowego w dziedzinie czasu, dla częstotliwości obrotowej 94 Hz.
Rys. 3. Widmo bić silnika wrzecionowego dla częstotliwości obrotowej 94 Hz
Literatura
[1] Chen B.M., Lee T.H., Peng K., Venkataramanan V.: Hard Disk Driver Serwo Systems, Advances in
Industrial Control, Springer-Verlag, London 2006.
[2] Jang G. H., Hong S. J., Kim D. K., Han J. H.: New design of a HDD spindle motor using damping material
to reduce NRRO, IEEE Transactions on Magnetics, vol. 36, no. 5, p. 2258-2260, September 2000.
[3] Jang G. H., Kim D. K., Han J. H.: Characterization of NRRO in a HDD Spindle System Due to Ball Bearing
Excitation, IEEE Transactions on Magnetics, vol. 37, no. 2, p. 815-819, March 2001.
[4] Jang G., Kim D., Oh J.E.: New frequency domain method of NRRO measurement in a Hard Disk Drive
Spindle Motor, IEEE Transactions on Magnetics, vol. 35, no. 5, p. 833-838, March 1999.
[5] Zyzik W., Pilch Z., Trawiński T., Zdzieblik M.: Zintegrowany model obwodowo-polowy układu wirujących
talerzy dysku twardego w środowisku Simulink/Femlab, XLV Sympozjon PTMTS Modelowanie w
Mechanice Wisła, Zeszyty Naukowe Katedry Mechaniki Stosowanej, Modelowanie Inżynierskie, t.1, z. 32,
s. 513-520, 2006.
Praca naukowa finansowana ze środków na naukę w latach 2009-2011 jako projekt badawczy N N510
355137
117
XXI Sympozjum PTZE, Lubliniec 2011
THE EVOLUTION OF ELECTROMAGNETIC FIELD
LIMITATION IN ICNIRP’S STANDARDS
Andrzej Krawczyk, Ewa Łada-Tondyra
Częstochowa University of Technology, Faculty of Electrical Engineering
The introducing of norms and standards concerning the limitation of electromagnetic field
exposure Has a long history and results from the development of power engineering (low
frequenct) and wireless telecommunication (high frequency). As the first standards were
introduced locally for one state or even for one particular manufactory there is difficult to find
one common idea in these procedures. The precursors of such procedures were American
companies, e.g. Bell Telephone (Bell), American Telephone and Telegraph (AT&T) or
General Electric (GE) [1].
As the time was gone the standardization was becoming more and more unified and the
world-wide and European organizations initiated the process of multi-national
standardization. In the 70-ties and 80-ties of the XX century such organizations as IEC,
CENELEC, ANSI and IEEE produced the standards which were valid in the group of states
or, at least, generated the pattern for one-state system of norms.
In 1992 the International Commission on Non-ionizng Radiation Protection (ICNIRP) was
chartered by IRPA (International Radiation Protection Association) as an independent
commission during its meeting In Montreal.
ICNIRP's charter was based on the highly
successful model of the International Commission on Radiological Protection (ICRP) that
develops guidance on protection for ionizing radiation. After several years, ICNIRP
guidelines have now been widely accepted. ICNIRP has close co-operation with the World
Health Organization and other international agencies to achieve the highest standards of
health risk assessment from which sound, science based NIR exposure limits can be
developed [2].
The first document regulating the non-ionizing radiation was launched by ICNIRP in 1998
and it was the very base for preparing the EU Recommendation [3]. The document, both
ICNIRP’s article and EU Recommendations were the ground for national regulations for
more than 10 years. The EU Directive EU 2004/40 concerning the EMF limitations in the
labour environment was based on [3. In 2010 the paper in Health Physics was published in
which the ICNIRP group published new document changing the hitherto standards twice [4].
In our paper we would like to show what the revolutionary difference between two
documents is. The last article of ICNIRP confined the range of frequencies in question and is
devoted to the frequencies 0 – 3 kHz. It shows that the comparison of two documents will be
carried out on the base of low frequency.
The revolutionary change lies not only in numbers but also in the philosophy of the
standardization, i.e. in the answer to the question: what the limitation of EMF is for. The
below passage will show the change of the approach.
Let us compare the subchapters of two documents which summarize the list of morbid
hazards connected with the exposure to such a field.
118
XXI Sympozjum PTZE, Lubliniec 2011
The document from 1998 quotes some possible adverse effects of electromagnetic field of
low frequency. Although the authors of the document are skeptical as to the results presented
in cited sources but they use them as the foundations of standards.
New ICNIRP’s document presents quite different approach, especially in the area of acute
effects. The approach consists in the analysis of visual effects of magnetic component, called
magnetophosphenes, which was discovered independently by Jacques Arsene d’Arsonval and
Silvanus P. Thompson in the turn of 19th and 20th centuries [5]. The visual effect is strictly
connected with the nerve system. Electric component of electromagnetic field of low
frequency acts on human body, in the opinion of the discussed document, in generating
electric charge on the surface of the body. As the effect is painful just t is addressed to the
reference level.
The document by 2010 introduces also the so called chronic effects. In this aspect of the
matter the authors refer to the IARC (International Agency for Research of Cancer) which
evaluates the cancerogenicity of magnetic component of low frequency electromagnetic field
and classifies it in category 2B which contains the situation with the possibility of cancer
generation. The category 2B is wide enough as to the factors belonging to this group – one
can find there such factors as coffee, vegetables, etc.
The difference in opinions after 12 years between two documents finds its visualization in
numbers. Below the reference values in electric and magnetic field quantities in the
frequency range 1 – 100 kHz are shown. Table 1 gives the values taken from the old
document, Table 2 shows the values of new document.
Table 1.
Frequency range
1-8 Hz
8-25 Hz
0,025-0,8 kHz
0,8-3 kHz
3-150 kHz
E-field strength
(Vm-1)
10 000
10 000
250/f
250/f
87
H-field strength
(Am-1)
3,2 x 104/f2
4/f
4 /f
5
5
B-field
(µT)
3,2 x 104/f2
5/f
5/f
6,25
6,25
E-field strength
(Vm-1)
5 000
5 000
5 000
2 500 x 102/f
H-field strength
(Am-1)
3,2 x 104/f 2
4 x 103/f
1,6 x 102
1,6 x 102
B-field
(µT)
4 x 104/f 2
5x 103/f
2 x 102
2 x 102
Table 2.
Frequency range
1-8 Hz
8-25 Hz
25-50 Hz
50-400 Hz
To transfer the arithmetic relations to the clear numbers the values for 50 Hz are shown in
Table 3.
Table 3.
Frequency – 50 Hz
old ICNIRP
new ICNIRP
E-field strength
(Vm-1)
5 000
5 000
H-field strength
(Am-1)
80
160
119
B-field
(µT)
100
200
XXI Sympozjum PTZE, Lubliniec 2011
A one can see the magnetic field strength increase two times in new document. In this digest
the standards for professional activity are not shown but there is the same jump of magnetic
field strength, namely from 0,5 mT till 1 mT. As it is highly likely that the ICNIRP postulates
will be again the base for EU Recommendation or Directive one can conclude that the
direction of standards is just to liberalize them, at least not to strengthen.
It should be stressed here that the opinion of the direction in which standards follow is
concluded from the ICNIRP article but it is recently recognized that ICNIRP’s opinions are
binding for EU.
References
[1] W. F. Hammet, Radio Frequency Radiation – Standards and Issues, Mc Graw-Hill, 1997
[2] J.H. Bernhardt (1979), The direct influence of electromagnetic fields on nerve and muscle cells of man
within the frequency range of 1 Hz to 30 MHz. Radiat. Environ. Biophys. 16: 309-323
[3] ICNIRP Guidelines (1998), Guidelines for limiting exposure to time-varying electric, magnetic, and
electromagneticfields (up to 300 GHz), Health Physics,74 (4): 494-522
[4] ICNIRP Guidelines (1998), Guidelines for limiting exposure to time-varying electric and magnetic fields
(1 Hz to 100 kHz), Health Physics,99 (6): 818-836
[5] A. Krawczyk, E. Łada-Tondyra (2010), The first experiments in magnetic stimulation – a history of
discoveries within two parallel lives, Acta Technica Jaurinensis, 3 (2): 153-160
120
XXI Sympozjum PTZE, Lubliniec 2011
SKUTECZNOŚĆ EKRANOWANIA NANOKRYSTALICZNEGO
PROSZKU STOPU FE-SI-B-CU-NB
W ZAKRESIE MIKROFALOWYM
Roman Kubacki 1, Jarosław Ferenc, R. Przesmycki 1
1
2
Wydział Elektroniki, Wojskowa Akademia Techniczna, Warszawa
Wydział Inżynierii Materiałowej, Politechnika Warszawska, Warszawa
W ostatnich latach wraz z rozwojem urządzeń wytwarzających promieniowanie w zakresie
mikrofalowym znacznie wzrosło zainteresowanie zagadnieniami kompatybilności
elektromagnetycznej w tym zakresie częstotliwości. W celu zmniejszenia niepożądanej emisji
wytwarzanej przez urządzenia generujące oraz zmniejszenia narażenia innych urządzeń
elektronicznych w tym również ludzi konieczne jest zastosowanie, w ekstremalnych
warunkach, materiałów ekranujących czyli absorberów. Skuteczność ekranowania takich
materiałów zależy od wielu parametrów, jednakże skuteczny absorber powinien
charakteryzować się wysokim poziomem absorpcji energii tego promieniowania i raczej
niskim poziomem odbijania padającego pola elektromagnetycznego. Do celów projektowania
materiałów ekranujących konieczne jest określenie konstytutywnych parametrów
komponentów wchodzących w skład absorbera czyli względnych zespolonych wartości
przenikalności elektrycznej () oraz magnetycznej ():
= ’ - j ”
= ’ - j ”
gdzie: ’, ” – rzeczywista i urojona wartość względnej przenikalność elektrycznej
’, ” – rzeczywista i urojona wartość względnej przenikalność magnetycznej
Niską wartość współczynnika odbicia można uzyskać gdy materiał będzie posiadał zarówno
własności elektryczne oraz magnetyczne i w dodatku wartości te powinny być porównywalne.
W pracy przedstawiono badania nowego materiału magnetycznego jakim jest szkło
metaliczne. Szkło metaliczne zbudowane na bazie żelaza lub kobaltu jest bardzo obiecującym
miękkim materiałem magnetycznym. Finemet (Fe73,5Si13,5B9Nb3Cu1) opracowany przez
Yoshizawę z firmy Hitachi był pierwszym tego typu materiałem. Finemet charakteryzuje się
wspaniałymi własnościami mechanicznymi i bardzo wysokimi wartościami przenikalności
magnetycznej ale w zakresie częstotliwości niskich. Zasadnym jest zatem poznanie
magnetycznych właściwości tego materiału w zakresie częstotliwości mikrofalowych, pod
katem zastosowania tego materiału do celów ekranowania pola elektromagnetycznego.
Pomiary przenikalności elektrycznej i magnetycznej próbek materiałów stałych najwygodniej
jest przeprowadzać w liniach współosiowych (koncentrykach) ze względu na
szerokopasmowość tych metod. W pomiarach próbek proszkowych dodatkowym
utrudnieniem jest konieczność zastosowania, a następnie uwzględnienia w obliczeniach
dodatkowych przegród z materiału dielektrycznego.
W przedstawionej konfiguracji pomiarów materiałów proszkowych istniej możliwość
pomiarów sypkich proszków charakteryzujących się własnościami elektrycznymi jak również
magnetycznymi. W dodatku taka konfiguracja gwarantuje istnienie jedynie rodzaju TEM w
121
XXI Sympozjum PTZE, Lubliniec 2011
tej linii współosiowej, a symetria układu, w przypadku gdy obie przegrody są z tego samego
materiału i mają jednakową grubość, pozwala na uwzględnienie do analizy jedynie
następujących współczynników macierzy rozproszenia S11 oraz S21. Na drodze przekształceń
algebraicznych uzyskuje się następujące wyrażenia na zespolone współczynniki macierzy
rozproszenia badanej próbki materiału proszkowego:
S11
S 21
E
E
H E
2
21
2
E11H H E11 Sw21
2
21
E11
E
2
11 Sw21
2
2
E 21
Sw21
2
21
E11H
2
E11 Sw21 2
gdzie:
H Sw11 E11
W zaproponowanej metodzie do obliczeń zespolonych przenikalności elektrycznych i
magnetycznych wykorzystana zostanie technika rozwiniętej fazy. Techniki rozwiniętej fazy
są stosowane w analizie sygnałów, przy czym technika ta sprowadza się do odtworzenia
pełnej wartości fazy na podstawie wartości fazy określonej w przedziale (-180, 180].
Pomiary zespolonych przenikalności elektrycznej i magnetycznej zostaną przeprowadzone
przy zastosowaniu wektorowego analizatora sieci. Układ pomiarowy składa się z odcinka
współosiowej linii pomiarowej, odcinków kalibracyjnych oraz połączeń LPC7. Średnica
zewnętrzna linii wynosi 7 mm, podczas gdy średnica wewnętrzna wynosi 3,04 mm, dzięki
czemu uzyskuje się wartość impedancji charakterystycznej 50 . System realizuje pomiary
modułów oraz faz współczynników macierzy rozproszenia.
W pomiarach zespolonych współczynników macierzy rozproszenia na niepewność pomiaru
wpływa szereg czynników. Jednakże stosując opracowaną przez NIST (National Institute of
Standards and Technology) metodę kalibracji można efektywnie obniżyć błąd pomiaru.
Metoda kalibracji TRL (Through-Reflect-Line) polega na pomiarach dodatkowych odcinków
linii współosiowych oraz uwzględnienie otrzymanych współczynników kalibracyjnych do
właściwych pomiarów. W takim przypadku niepewność pomiarów przenikalności , jest nie
większa aniżeli 5 %.
Szkła metaliczne na bazie żelaza i/lub kobaltu od czterdziestu lat są znane jako bardzo dobre
materiały miękkie magnetycznie. Wytwarza się je w postaci taśm i stosowane są w stanie
bezpośrednio po odlaniu lub odprężone, a ich głównymi obszarami zastosowań są maszyny
elektryczne i energoelektronika, tj. urządzenia pracujące w niskich częstotliwościach.
Podejmowano wiele prób zastosowania szkieł metalicznych w formie proszku, ale ich
właściwości są znacznie gorsze od postaci taśm. Z drugiej strony, niektóre szkła metaliczne
służą jako stopy wyjściowe do wytwarzania stopów nanokrystalicznych: nagrzewa się je, aby
spowodować częściową krystalizację, i jeśli średnia średnica ziaren wynosi 10-15 nm,
uzyskuje się materiał miękki magnetycznie o znakomitych właściwościach. Finemet
(Fe73,5Si13,5B9Nb3Cu1), opracowany przez Yoshizawę z firmy Hitachi, był pierwszym
stopem tego rodzaju. W zakresie niskich częstotliwości nanokrystaliczny Finemet wykazuje
znakomite właściwości magnetyczne.
W pracy przedstawiono pomiary przenikalności elektrycznej i magnetycznej proszku
nanokrystalicznego szkła metalicznego dla 4 grup z następującymi wielkościami ziaren: grupa
A – wielkość ziaren mniejsza aniżeli 25 m, grupa B – (25 – 50) m, grupa C – (50 – 100)
m i grupa D – (100 – 200) m, w zakresie mikrofalowym, tj. w zakresie częstotliwości od 200
MHz do 10.2 GHz.
122
XXI Sympozjum PTZE, Lubliniec 2011
Skuteczność
ekranowania
określa
wielkość
zmniejszenia
natężenia
pola
elektromagnetycznego lub gęstości mocy za ekranem. Skuteczność ekranowania zależy od
wielu czynników i można ją scharakteryzować poprzez tłumienie odbiciowe i tłumienie
czynne (absorpcja energii fali w materiale). Badania skuteczności ekranowania przedstawiono
dla warstw materiałów proszkowych szkła metalicznego dla zmierzonych przenikalności
elektrycznej i magnetycznej. Określenie tłumienia odbiciowego oraz czynnego umożliwia
określenie jaki jest udział odbicia i jaki pochłaniania energii w samym absorberze w
całkowitym tłumieniu wnoszonym przez ekran. Godzi się zauważyć, że dobry absorber
powinien charakteryzować się wysoką absorpcją i niskim poziomem odbijania energii pola.
W wielu aplikacjach niski poziom tłumienia odbiciowego jest wręcz wymagany.
123
XXI Sympozjum PTZE, Lubliniec 2011
ELEKTRONICZNY ZESTAW POMIAROWY
DO BADAŃ DIAGNOSTYCZNYCH
PROTEZ ZĘBOWYCH
PRZY WYMUSZENIACH DYNAMICZNYCH
Marek Kuchta, Marek Szulim
Wojskowa Akademia Techniczna, Wydział Elektroniki, Warszawa
Wstęp
Weryfikacja i optymalizacja parametrów protez jest możliwa, między innymi, poprzez
badania na specjalistycznych stanowiskach diagnostycznych, zarówno stosowanych
materiałów jak i gotowych „konstrukcji‖.
Zaprojektowany zestaw przeznaczony jest zasadniczo do badań gotowych protez
dentystycznych. Możliwości pomiarowe zestawu są następujące:
pomiary dynamiczne i statyczne ugięcia oraz odkształceń sprężystych protezy,
możliwość pomiaru przy zadawaniu obciążenia w dowolnym punkcie uzębienia,
zdolność do badania różnych typów protez zębowych,
automatyczne sterowanie procesem pomiarowym wraz ze wstępnym przetwarzaniem
informacji pomiarowej.
Budowa i parametry techniczne
Zestaw pomiarowy składa się z części mechanicznej służącej do zadawania obciążeń
dynamicznych lub statycznych oraz elektronicznej części pomiarowej, która steruje procesem
pomiarowym oraz pozwala na archiwizację i przetwarzanie wyników pomiaru (rys.1).
P2
Sygnały
przetworników
przesunięć liniowych
T2
Sterowanie pomiarami i
transmisja wyników pomiaru
P1
Wzmacniacz
pomiarowy
SPIDER8
P0
Sygnały
przetworników
tensometrycznych
T1
Oprogramowanie w LabView do
generacji oraz pomiaru ugięć i
odkształceń dynamicznych
RS-232C
P3
F0
L0
L1
F1
F3
IEEE 1284
L3
L2
F2
Sterowanie silnikiem
krokowym
Silnik krokowy
Rys.1. Schemat funkcjonalny systemu do pomiaru zmian położenia płaszczyzny pomiarowej
oraz odkształceń protezy skrzydłowej w warunkach dynamicznych
124
XXI Sympozjum PTZE, Lubliniec 2011
Zadaniem części mechanicznej jest odpowiednie zamocowanie badanej protezy wraz z
możliwością zadawania zewnętrznych obciążeń w dowolnym punkcie uzębienia.
Siła F0 o znanej wartości jest przykładana na środek płaszczyzny pomiarowej. Poprzez trzy
trzpienie jest ona przenoszona bezpośrednio na wybrane zęby. W punktach pomiarowych
P0P3 następuje zmiana położenia w płaszczyźnie pionowej L0L3. Wartość zmian
położenia jest mierzona we wskazanych punktach przez przetworniki przesunięć liniowych.
Punkty pomiarowe P1P3 (przetworniki przesunięć linowych) rozmieszczone są w
wierzchołkach trójkąta równobocznego a punkt P0 znajduje się dokładnie w środku tego
trójkąta. Za pomocą, co najmniej trzech punktów można jednoznacznie wyznaczyć
płaszczyznę w przestrzeni trójwymiarowej
Zadaniem części elektronicznej jest w pełni automatyczny pomiar przy zadawaniu obciążeń
dynamicznych. Wzmacniacz pomiarowy Spider8 zasila przetworniki pomiarowe (przesunięć
liniowych i tensometryczne) jednocześnie wzmacniając i przetwarzając na postać cyfrową
sygnały elektryczne z przetworników. Archiwizacja oraz wstępne przetwarzanie wyników
następuje w komputerze klasy PC.
Przykładowe wyniki pomiarów
Wykorzystując opisany powyżej system pomiarowy, wraz z oprogramowaniem, wykonano
wiele serii pomiarowych dla różnych typów protez skrzydłowych. Poniżej przedstawiono
jedynie wybrane wykresy czasowe sygnałów przesunięć i odkształceń oraz zależności
funkcyjne między zarejestrowanymi wielkościami. Jako przykład wybrano obciążanie
płaszczyzny pomiarowej siłą 1kG z przeniesieniem jej na wybrane zęby protezy
Przesunięcia ząb nr 7 protezy obciążenie=1kG
1
Przesunięcie [mm]
0,5
0
-0,5 0
2
4
6
Przesunięcie P0 [mm]
-1
-1,5
Przesunięcie P1 [mm]
-2
Przesunięcie P3 [mm]
Przesunięcie P2 [mm]
-2,5
-3
-3,5
Czas [s]
Rys. 3. Sygnały przesunięcia w funkcji czasu
Przesunięcia ząb 7 protezy obciążenie=1kG
Przesunięcia na obwodzie
[mm]
0,8
0,7
0,6
0,5
0,4
0,3
0,2
Przesunięcie P1 [mm]
Przesunięcie P2 [mm]
Przesunięcie P3 [mm]
0,1
-4
-3
-2
-1
0
-0,1 0
Przesunięcie P0 [mm]
Rys.4. Przesunięcia na obwodzie płaszczyzny pomiarowej
w funkcji przesunięcia całej płaszczyzny
125
XXI Sympozjum PTZE, Lubliniec 2011
Wnioski końcowe
Przeprowadzone dotychczas badania protez zębowych w pełni potwierdziły przydatność
omawianego stanowiska do określania właściwości mechanicznych protez zębowych.
W szczególności zestaw pomiarowy umożliwia badania ugięć i odkształceń sprężystych w
zależności od miejsca przyłożenia obciążenia zarówno w warunkach statycznych jak i
dynamicznych.
Automatyczne zadawanie obciążeń dynamicznych wraz z równoległym synchronicznym
próbkowaniem pozwala na prowadzenie długotrwałych badań zmęczeniowych. Pozwala to na
określanie trwałości protez wraz z szacowaniem czasu ich przydatności przy założonej ilości
zgryzów. Opracowane oprogramowanie jest w pełni skalowanie i pozwala na zadawanie
praktycznie dowolnej ilości cykli obciążeń.
Literatura
[1] Instrukcja obsługi wzmacniacza pomiarowego SPIDER8, Hottinger Baldwin Messtechnik, Darmstadt 1999.
[2] Instrukcja użytkowania oprogramowania CATMAN ® EXPRESS ver.3.0, Hottinger Baldwin Mestechnik,
Darmstadt 1999.
[3] Instrukcja użytkownika platformy programowej LabView ver.6i, National Instruments, Austin Texas 2000.
[4] Instrukcja pomiarowa platformy programowej LabView ver.6i, National Instruments, Austin Texas 2000.
[5] Z. Orłoś, Pomiary naprężeń w budowie maszyn, Warszawa, PWN 1986.
126
XXI Sympozjum PTZE, Lubliniec 2011
PARALLEL FINITE ELEMENT METHOD
Miklós Kuczmann
Laboratory of Electromagnetic Field,
„Széchenyi István” University, Győr, Hungary
The simulation of electromagnetic field problems can be very time consuming. Especially the
three dimensional nonlinear computations with the insertion of vector hysteresis models or the
simulation of radio frequency applications with open boundary.
The time for computations can be decreased by the use of the domain decomposition method
(DDM) [1,2]. The general aim of DDM is to decompose the finite element mesh by
algorithms with several heuristics, and the assembly of the matrices of the sub-problems can
be worked out in a parallel way, as well as the solution of the generated system of equations.
The full paper and the presentation will present two-dimensional case studies to show the
applicability of the domain decomposition techniques and the parallel algorithms.
The problem to be solved has been discretized by the meshing function of the COMSOL
Multiphysics software package, then the finite element mesh has been decomposed into
several sub-meshes by the package called METIS [1]. The problem has been solved by a
parallel algorithm implemented in C written by the author. A distributed computer has been
built up to solve the problem, and the Message Passing Interface (MPI [2]) has
been applied in the communication of the parallel hardware. Finally, all the visualizations
have been performed in the frame of COMSOL Multiphysics. It is evident that the future task
is to apply the distributed computer to solve large scale problems.
Fig. 1. Finite element mesh partitioning (picture is from the website [3])
127
XXI Sympozjum PTZE, Lubliniec 2011
Acknowledgement
This paper was supported by ‖Széchenyi István‖ University.
References
[1] http://glaros.dtc.umn.edu/gkhome/views/metis.
[2] J. Kruis, Domain Decomposition Methods for Distributed Computing, Saxe-Coburg Publications, Kippen,
Stirling, Scotland, 2006.
[3] http://morpheus.pte.hu/~peteri/work/partitioning/index.html
128
XXI Sympozjum PTZE, Lubliniec 2011
FORCE CALCULATION IN AC DIELECTROPHORESIS
Eugeniusz Kurgan
AGH University of Science and Technology,
Deptartment of Electrical and Power Control Engineering, Kraków
Introduction
Dielectrophoresis enables voltage-controllable trapping, focusing, translation, fractionation
and characterization of mineral, chemical and biological properties of a fluid suspending
medium. Because the dielectric and conducting properties of a particle the electric field
depends not only from frequency of the exciting source but also on both its structure and
composition. In this way dielectrophoretic forces enable to study a much greater set of
particle properties than electrophoresis. DEP is mostly well appropriate in applications at the
small scales of microfluidic apparatus, is suitable to integration by cheap fabrication methods,
is easily and directly interfaced to electronics devices, and can greatly reduce the need for
complex and expensive specimen manipulation methods involving mechanical pumps and
valves. DEP techniques are also very useful in the purification, enrichment, and
characterization of a wide variety of environmental, biological and clinical ingredients and
significant progress has been made in theory and in accompanied technologies. In practice,
dielectrophoretic process is based on micro patterned electrodes immersed in dielectric fluid.
When these electrodes are subjected to applied external voltages, the electrodes generate no
uniform electric fields [1].
In comparison to electrophoresis, by which we understand particle motion due to the force
resulting from coupling between an applied external electric field and a charge particle,
dielectrophoresis has the disadvantage that the polarization forces acting on polarized particle
are quite weak. In general, efficient particle manipulation in microelectrode arrangement
requires taken into account other factors, such as viscous, buoyancy, and
electrohydrodynamic forces. This constitutes complicated system of mathematically coupled
different physical fields, which results in mutually coupled system partial differential
equations. From practical point of view only numerical methods can give, from practical point
of view, satisfactory results
Power of heat sources
Most general approach to dielectrophoretic force calculation is proposed by Sauer and
Schloegl and is based on the Maxwell stress tensor formulation where the stress tensor T is
integrated over the any surface surrounded the particie [2]:
FDEP (t )
T n dS
(1)
where n is the unit vector normal to the surface. This method is regarded as the most general
approach for computation of the field induced forces. In this article author calculate electric
field and a force in interdigitated system of electrodes with horizontal symmetry, as it is
shown in Fig. 1.
129
XXI Sympozjum PTZE, Lubliniec 2011
A
0
n
substrate
E
periodic
boundary
conditions
h
E
periodic
boundary
conditions
particle
2
FDEP
a
B
C
a
Uz
b
0
0.5b D
Fig. 1. Cross section of the electrode arrangement with one pair of electrodes
and moving biological particle is depicted.
Several analytical and numerical methods have been developed to derive expressions for the
dielectrophoretic force acting on particle immersed in dielectric fluid. Dielectric particle is
usually modelled as homogeneous sphere or symmetric configuration of uniform layers. In
the case of loss free dielectrics good agreement with measurements can be obtained by energy
variation principle [3]. In our case the field is described by set of following well known
equations:
( E) c
(2)
E
(3)
J
c
t
(4)
where E is the electric field, J is current density vector, φ is the electric potential and ρc is the
electric charge density. The time-averaged force on the particle using equivalent electric
dipole moment is given by [1]
ˆ * 2 r 3 K E
ˆ 2K E E
f t Re (pˆ )E
1 0
R
I
I
R
2
(5)
where ER and EI are real and imaginary parts of electric field E and KR and KI are real and
imaginary parts of the well-known Clausius-Mossotti complex factor defined as
ˆ ˆ
Kˆ ˆ1 , ˆ2 2 1
ˆ2 2ˆ1
(6)
with possibly complex permittivities [9, 10]
ˆ1 1 j
1
(7)
ˆ2 2 j
2
(8)
Computational results
For geometry as in Fig.1 distribution og the potential anf electric force was calculated and
presented in Fig.2.
130
XXI Sympozjum PTZE, Lubliniec 2011
Fig. 2. Modulus of the potential in the fluid and force distribution in dielectric liiqid.
References
[1] Y. Huang, X.B. Wang, F.F. Becker, P.R.C. Gascoyne, Introducing dielectrophoresis as a new force field for
field-flow fractionation, Biophys. J.,vol. 73, (1997), pp. 1118–1129
[2] J. Yang, Y. Huang, X.B. Wang, F.F. Becker, P.R.C. Gascoyne, Cell separation on microfabricated electrodes
using dielectrophoretic/gravitational field-flow fractionation, Anal. Chem., vol 71, (1999), pp. 911–918
[3] X.B. Wang , J. Yang, Y. Huang, , F.F. Becker, P.R.C. Gascoyne, Unified theory of dielectrophoresis and
travelling wave dielectrophoresis, J. Phys D, 1994, 1571 1574
[4] Wang X.-B., Hughes M. P., Huang Y., Becker F. F., Gascoyne P. R. C., ―Non-uniform spatial distributions
of both the magnitude and phase of AC electric fields determine dielectrophoretic forces,‖ Acta Biochim.
Biophys., vol. 1243, pp. 185–194, 1995.
131
XXI Sympozjum PTZE, Lubliniec 2011
MODELLING OF THE CURRENT AND POTENTIAL
DISTRIBUTION IN CAVITY CORROSION
Eugeniusz Kurgan, Agnieszka Wantuch
AGH University of Science and Technology,
Deptartment of Electrical and Power Control Engineering, Kraków
Introduction
In order to predict corrosion rates in the pitting corrosion process, characterization of the local
chemical environment is needed. From theoretical point of view mathematical models taking
into account diffusion and migration processes of ions and electrochemical and chemical
reaction in electrolyte can describe some aspects of pitting phenomena, numerical difficulties
in implementation of the model invariably arise. Such difficulties are caused either by
mathematical complexity of the phenomenon or by uncertainty of the electrochemical and
chemical processes which occur. In the present paper, finite element method was used to
simulate species, current and potential distribution inside the pit including multiple species,
chemical reaction equilibria and mutual coupling of equation through equation coefficients
and boundary conditions.
Derivation of main equations
The local environment in the pit, where corrosion takes place is considerably different from
that in external bulk solution. In the pit reaction phenomena lead to accumulation and
depletion of reaction products in the electrolyte. Several authors have developed onedimensional models which simulate corrosion inside the pit with assumption of passive walls
with active dissolution at the pit bottom [1]. While these models may adequately describe
corrosion in crevice where one-dimensional approach is valid, they have troubles in
predicting the solution in cavities of arbitrary shape where two-dimensional approach is
needed. One-dimensional models can not to simulate adequately species distribution under
arbitrary shape assumption. Shape expansion is very important aspect of pitting corrosion
process [2].
The present model assumes that iron section with a pit is immersed in electrolyte and at
beginning the concentration of all species in cavity is the same [3].
Insulation
C
D
F
E
b
Metal
Pit
A
B
Bulk electrolyte
a
Anodic reaction
Fig. 1. Schematic illustration of the cavity corrosion process
132
XXI Sympozjum PTZE, Lubliniec 2011
On the iron-electrolyte boundary along the walls A-B-C electrochemical reaction takes place [4]
(1)
Fe Fe2+ 2e
and additionally three basic homogeneous chemical reactions occur in the cre-vice and the
bulk of electrolyte
(2)
Fe2+ H2 O Fe OH H+
Fe OH H2 O Fe OH 2(s) H +
H2 O H+ OH
(3)
(4)
The hydrolysis product Fe(OH)2(s) precipitates in the bulk of the electrolyte. The
concentration of individual species are named as follows:
C1 [Fe2+], C2 [Fe(OH)+], C3 [H+], C4 [OH].
(5)
and charge numbers are given by
z1 2
z2 1 z3 1 z4 –1
The fluxes of individual species in electrolyte can be defined by most fundamental NernstPlanck equation in general form [6,7]:
Ni zi
F
Di Ci Di Ci
RT
(6)
where i 1, 2, 3, 4 and denotes electric potential. After some manipulations we get first
partial differential equation for C1variable
D12C1 z1
F D1
F D1
C1 P R1
F1 z1
RT
RT
(7)
where vector F1 is given by
F1
F 2 D4
z2 z4 z2 C2C1 C1C2 z3 z4 z3 C3C1 C1C3
RT
(8)
In analogous way one can write equations for C2 and C3
F
RT
F
D32C3 z3
RT
D22C2 z2
D2
F
RT
D3
F
F3 z3
RT
F2 z2
D2
C2 P R2
(9)
D3
C3 P R3
(10)
where
F 2 D4
RT
F 2 D4
F3
RT
F2
z1 z4 z1 C1C2 C2C1 z3 z4 z3 C3C2 C2C3
(11)
z1 z4 z1 C1C3 C3C1 z2 z4 z2 C2C3 C3C2
(12)
Equations (7), (9), (10) constitute full set of mutually coupled and non-linear partial
differential equations to be solved.
Chemical reaction rates
For single ions following kinetic equations is it possible to write [5]
R1 k1FC1 k1BC2C3
(13)
(14)
R2 k1FC1 k1BC2C3 k2FC2 k2BC3
(15)
R3 k1FC1 k1BC2C3 k2FC2 k2BC3 k3F k3BC3C4
where k1F, k2F, k3F are forward kinetic reaction constants and k1B, k2B, k3B are backward kinetic
reaction rates. The reaction equilibria for equations (2),.(3) and (4) give additional relations
K1
k1F
k1B
K2
k2F
k2B
133
K3
k3F
k3B
(16)
XXI Sympozjum PTZE, Lubliniec 2011
Boundary conditions
Boundary conditions for all concentrations on metal-electrolyte boundary can be derived from
following relationships
D1
i
C1
F
n z1
D1C1
n
z1 F
RT
n
(17)
C2
F
z2
D2C2
n
RT
n
C
F
D3 3 z3
D3C3
n
RT
n
C
C
C
1
F
in z1 D1 D4 1 z2 D2 D4 2 z3 D3 D4 3
n
1
1
n
n
n
D2
(18)
(19)
(20)
An illustrative example
As an illustrative example let us to calculate the distribution of concentrations of all species,
current density and electric potential distribution in cavity with dimensions a 1.5 cm and b
1 cm. Other parameters used in calculations are given below [2].
Thermodynamic data: K1 = 1.585e-13 mol/dcm3, K2 1.259e-5, K3 1.047e-20 (mol/dcm3)2
Diffusion coefficients : Fe2+: D1 7.2e-6 cm/s2, Fe(OH)+:
9.3e-5 cm/s2, OH–: D4 5.3e-5 cm/s2
D2 1e-5 cm/s2, H+:
D3
Kinetic data: i0 1.0e-5 A/cm2, E0a = –0.44 V, T 25oC, n 2
Bulk solution data: pHb 8 mol/dcm3
Finite element Galerkin’s method was used to solve this problem [10]. Results of the
computations are depicted on the figures below.
Fig. 1. Dependence of Fe2+ and Fe(OH)+ concentrations along E-F path
References
134
XXI Sympozjum PTZE, Lubliniec 2011
[1]
[2]
[3]
[4]
[5]
Sharland S.M., A review of the theoretical modelling of the crevice and pitting corrosion, Corrosion
Science, Vol. 27, no. 3, 1987, 286-323.
White S.P., Weir G.J., Laycock N.J., Calculating chemical concentrations during the initiation of crevice
corrosion, Corrosion Science, vol. 42, 2000, 605-629
E. Kurgan, Influence of electrolyte conductivity on cathodic protection with sacrificial anode, Acta Techn.
CSAV, vol. 49, 2004, 356 – 382
Jones, D.J., Principles and prevention of corrosion, Mcmillan Publishing Company, N.Y. (1992)
Sharland S.M., A review of the theoretical modelling of the crevice and pitting corrosion, Corrosion
Science, Vol. 27, no. 3, 1987, 286-323.
135
XXI Sympozjum PTZE, Lubliniec 2011
NUMERICAL STUDY OF NANOPARTICLE HYPERTHERMIA
Eugeniusz Kurgan
AGH University of Science and Technology,
Deptartment of Electrical and Power Control Engineering, Kraków
Introduction
One of the most important problems in finding suitable therapy for cancer is the heat damaged
cancer cells while to save healthy ones. Hyperthermia one of the therapeutic methods, which
strive to treat only cancer cells to leave other intact. Generally it is very difficult problem,
because the cancer region can be very irregular with fuzzy boundary between healthy and sick
parts of body. Despite of this approach is still investigated by many scientists and substantial
progress in this area has been made. In the present paper, electromagnetic field and
temperature distribution is calculated when as source heat nanoparticles are used.
Hyperthermia is a intentional raise of local body temperature. Healthy tissues tolerate excess
temperature over normal state to a certain level, whereas unhealthy cell in such conditions die.
Normal tissues have extensive network of blood vessels, veins and neurons that can relatively
easy conduct and dissipate generated heat while cancer cells have far less developed veins and
neurons and thus less heat dissipation capability. Both health and unhealthy cells are prone to
high temperature but hyperthermia therapy tries to heat tissues to such temperature where
healthy cells survive and damaging cells are destroyed. As side effect of hyperthermia
treatment, cancer cells become more vulnerable to other form of therapy such as chemical or
radiation therapy. A temperature of cancer tissues in range of 42 – 44 degree Celsius has been
established to be the most acceptable for hyperthermia [1].
Magnetic nanoparticles used in medical applications have sizes ranging from a few
nanometers up to thousands of nanometers, what means that their dimensions are smaller than
or comparable to those of a cell (10–100μm), a protein (5–50 nm), a virus (20–450 nm), or a
gene (2 nm wide and 10–100 nm long). Because of this they can to come in direct vicinity of
biological tissues of interest. Such nanoparticles should be coated with biological molecules,
such as a starch, to make them difficult to recognize by an organism's immune defense
system, thereby providing a possibility to control the means of transport them to desire places.
The nanoparticles are magnetic, what means that they obey Lorenz’s low, what gives
possibility to manipulate them by an external magnetic field with high magnetic gradient.
This property of magnetic nanoparticles enables location of them in desired places. Next,
magnetic nanoparticles can be made to respond to time varying electromagnetic field, what
results in transfer of energy from external exciting energy sources to nanoparticles and in this
way to treated tissues.
On the other hand such heat generation agents as nanoparticles or magnetic seeds, when they
are placed in AC electromagnetic field, are capable uniformly generate heat at the target cells.
This is the reason why such approach is thought as a perspective method for hyperthermia in
oncology. In order to deliver these particles to cancer cells they are integrated with therapeutic
agent in polymeric micro-caries of approximately 1 – 3 micrometers in diameter what allow
them to be transported even through smallest capillaries. These micro-agents can then be
navigated to tumor tissues where they should be collected.
136
XXI Sympozjum PTZE, Lubliniec 2011
Several authors have considered the heat generation problem here given volume of tumor was
heated by evenly placed heat sources such as magnetic nanoparticles or seeds. However, it is
often-assumed that a heat generation in amount of 100mWcm3 will suffice in most
circumstances to heat a tissue. The generating heat is limited by many harmful physiological
reactions of the healthy tissues to high frequency and strength the externally applied AC
magnetic field used in hyperthermia. The negative effects incorporate stimulation of
peripheral and skeletal muscles, eventual cardiac stimulation and arrhythmia and eddy-current
e heating of tissues. It is assumed, that the useful range of frequencies and magnetic strength
is considered to be in the range f = 50–1200kHz and H = 0–15 kAm−1. Another authors
report that exposure to field should fulfill a condition that product of magnetic strength and
frequency Hf should not exceed 4.85108 = 523.8Am−1 s−1 in order to be tolerable. The
methods of administration of the nanoparticles suspended in liquid decide about the amount
of magnetic material required to produce the desired temperature. So, the direct injection of
the therapeutic agent allows for significantly greater quantities of nanoparticles to be localized
in a tumor than do methods utilizing intravascular administration or antibody targeting. One
can assume that about 5–10 mg of magnetic nanoparticles should be comprised in each cm3 of
tumor tissue is suitable for magnetic hyperthermia.
Power of heat sources
In this article it is assumed that heat generation is only caused by hysteresis losses. The
hysteresis loss is a consequence of the nonlinear properties of magnetic materials exposed to a
time varying magnetic field and is proportional to the area of the hysteresis loop and
frequency of the exiting source.
Let us now calculate the amount of energy proportional to surface of hysteresis loop.
Infinitesimal increase in magnetic energy is given by [1]:
dwm H dB
(9)
under assumption that ferromagnetic material is isotropic. Integrating both sides of this
equation along hysteresis loop we get the energy density obtained in one magnetization cycle:
wm
HdB
(10)
In order to calculate the above value, we have to approximate analytically hysteresis loop
given from measurements. It is well known that the magnetic induction B, the magnetic field
strength H and the intensity of magnetization M, are related by
B 0 H M
(11)
where 0, is the permeability of free space where M is a complicated function of H, which can
be approximated by a second-order rational fraction of the form [2]
M (H )
a0 a1 H a2 H 2
1 b1 H b2 H 2
(12)
where ai and bi are constant coefficients, which in general can be determined by curve-fitting
methods for low and high field approximation.
dB
dH
H 0
dg dg
1 2
dH dH H 0
Because g2(H) is even function so its lope in point H 0 and B Br is zero, so
137
(13)
XXI Sympozjum PTZE, Lubliniec 2011
diff
H 0, B Br
dg1
dH
0 1 a1
H 0
(14)
It Is obvious that at saturation point the differential permeability has constant value, so from
Bs
0 1 a1
Hs
(15)
the parameter a1 can be obtained
a1
Bs
1
0 H s
(16)
For the point H Hs and B Bs of hysteresis loop the parameter a2 can be obtained from
Błąd! Nie można odnaleźć źródła odwołania. after substituting a1 from (16):
B 0 H s H 0 a2 H s H 2
Bs 0 H s s
0 H s 1 b1 H b2 H 2
(17)
what after some manipulations gives
a2
Bs 0 H s
b1H s b2 H s2
0 H s2
(18)
Finally for g2(H) function at H 0 and g2 Br and dg2/dH 0 we get
c1
c2
b1 Br
0
Br
(1 b1 H s )
0 H s2
(19)
(20)
Now all coefficients can be deduced from the data supplied by manufacturers of given
magnetic materials or by adequate laboratory measurements. The energy supplied when the
magnetic field ones goes around hysteresis loop can be calculated as [2]:
c
c
bc c b
wm 4 2 H s 2 c1 H s c2 H s2 I1 1 2 1 2 I 2
b2
b2
b2
(21)
where
I2
I1
2
4b
2
b12
1/ 2
b
1
ln b2 H s2 b1 H s 1 1 I1
b2
2b2
(22)
b1
arctan 2b2 H s b1 arctan
2 1/ 2
2 1/ 2
4b2 b1
4b2 b1
(23)
Field and heat equations
Comparison of real and imaginary parts in (6) gives
1
Azr Azr Azi J zr
(24)
1
Azi Azr Azi J zi
(25)
138
XXI Sympozjum PTZE, Lubliniec 2011
For one Debey’s process we can assume [4]
ˆ
1
1 j1
1
j
0
(26)
where is the high-frequency limit of relative permittivity, 1 is the relaxation intensity, 1
the Cole–Cole parameter and 1 the relaxation time. Thus if we define complex permittivity as
ˆ ˆ E
ˆ j E
ˆ
D
(27)
Where is is the real part of the permittivity, which is related to the stored energy within the
medium and is a dielectric loss factor (is the imaginary part of the permittivity, which is
related to the dissipation (or loss) of energy within the medium).
The expression of Pennes bioheat equation in a body with uniform material properties
in steady state is given by
kT bCbb (Tb T ) Qext Qmet
(28)
where T is temperature [K], k − the tissue thermal conductivity [W/(mK)], b− the blood
perfusion rate [1/s], Cb − the blood specific heat, Tb − the blood vessel temperature, Qmet − the
metabolic heat generation rate [W/m3], and Qext − the external heat sources [W/m3]. The usual
boundary condition associated with the heat transfer process in the RF hyperthermia can be
given by
n kT h(Tair T )
(29)
on boundary Ž, where h is the heat transfer coefficient [W/(m2∙K)], Tair is the temperature of
the surrounding air [K].
Computational results
It was assumed that tumor occurs in liver as in Fig.1 right. The amount of 10mg/cm3
nanoparticles was injected into tumor and uniformly inside distributed. Geometrical
dimension are given in Fig.1. Exciting wirers with current have parameters Imax = 1e4 [A], r5
0.01 [m] and frequency f = 100 [MHz], Physical parameters of blood are as follows: ρb
1060 [kg/m3], Cb 3639 [J/(kg∙K)], Tb 310.15 [K], ωb 0.005 [1/s]. Physical parameter of
tissues are given by: relative permittivity εr 29.6 in body, 70 in tumor and 5.8 in liver,
electric conductivity ζ 0.02[S/m] in tumor, body and skin and 0.002[S/m] in liver. The
hysteresis loss for one loop is 510-4J/g when H0=35kA/m. The frequency was assumed f
100kHz. The exciting current was so adjusted to attain specific loss power 400, 450 and 500
mW/cm3.
139
XXI Sympozjum PTZE, Lubliniec 2011
skin and fat
40.0
Magnetization kAm2/kg
1.2
body
20.0
s
t
q p
n
j
e
r
1.1
t: 1.02
s: 0.99
r: 0.96
q: 0.93
p: 0.90
o: 0.87
n: 0.84
m:0.81
l: 0.78
k: 0.75
j: 0.72
i: 0.69
h: 0.66
g: 0.63
f: 0.60
e: 0.57
d: 0.54
c: 0.51
b: 0.48
a: 0.45
k
0.0
o
g
h
1.
f
a
c
b
-20.0
o
d
i
m
0.9
r
t
-40.0
s
q
g
p
l
liver
0.8
0.0
-40.0
Magnetic field A/m
-80.0
40.0
times 1e5
tumor
80.0
0.8
0.9
1.
1.1
1.2
Fig. 1. Minor hysteresis loops for (Co)Fe2O3 nanoparticles (left) and magnetic potential distribution in skin,
body liver and tumor (right).
52
Temperature on tumor bounday [oC]
Temperature on tumor bounday [oC]
500 [mW/cm3]
50
450 [mW/cm3]
48
400 [mW/cm3]
46
44
42
40
38
43
500 [mW/cm3]
42.75
42.5
42.25
42
41.75
450 [mW/cm3]
41.5
400 [mW/cm3]
41.25
36
0
0.02
0.04
0.06 0.08 0.1 0.12
Tumor perimeter [m]
0.14
0
0.16
0.02
0.04
0.06
0.08
Tumor perimeter [m]
0.1
0.12
Fig. 2. Temperature distribution along cross section of the liver (left) and perimeter of the tumor (right).
References
[6] Rivas J., Zamarro J. M., Martin E., Pereira C., ―Simple Approximation for Magnetization Curves and
Hysteresis Loops‖, IEEE Transactions on Magnetics, vol. MAG-11, no. 4, July 1981
[7] Pavel M., Stancu A., ―Ferromagnetic Nanoparticles Dose Based on Tumor Size in Magnetic Fluid
Hyperthermia Cancer Therapy‖, IEEE Transactions on Magnetics,vol. 45, no. 11, 2009
[8] Moroz P., Jones S. J., Winter J., Gray B.N., ―Targeting Liver Tumors With Hyperthermia: Ferromagnetic
Embolization in a Rabbit Liver Tumor Model‖, Journal of Surgical Oncology,vol. 78:22 29, 2001
[9] Wulff W., ―The energy conservation equation for living tissue‖, IEEE Trans. Biomed. Eng., vol. BME-21,
pp. 494–495, Nov. 1974
140
XXI Sympozjum PTZE, Lubliniec 2011
USE OF RF HYPERTHERMIA FOR TREATMENT
OF TUMORS LOCATED IN THE HUMAN THIGH
Eugeniusz Kurgan, Piotr Gas
AGH University of Science and Technology,
Deptartment of Electrical and Power Control Engineering, Kraków
Hyperthermia has become a useful form of cancer therapy. It uses differences in temperature
sensitivity between tumor cells and their normal counterparts [1]. It was observed that at
temperatures of 42°C to 45°C only the neoplasmic cells are destroyed, while healthy tissues
remain unaffected. At higher temperatures the denaturing of proteins occurs, which leads to
permanent destruction of all cells. Therefore, the therapeutic effects of hyperthermia depend
on temperature and time exposition. There is also evidence that the effectiveness of
hyperthermia significantly increases in combination with other cancer treatments like radioor chemotherapy [2]. There are many studies on the treatment of cancer using hyperthermia which
demonstrate that this aspect is still important and more research is needed in this matter [6].
In this publication a model and numerical simulation of temperature distribution produced by
electromagnetic radiation in RF hyperthermia is presented. Let us consider a cross section of
human thigh. The heat is induced by exciting wires with currents placed near the treatment
region, as depicted in Fig.1.
current in
skin 1,1
tumor ,
muscle ,
bone ,
current out
wires with exciting currents
Figure 1. Simplified version of transverse section across human thigh with the tumor inside.
In RF hyperthermia treatment we are dealing with an electromagnetic field coupled with a
temperature field. The former in the complex form is described by the equation
1
ˆ j 2ˆ A
ˆ Jˆ
A
i
where Ĵ i is the exciting current density, and  is the magnetic vector potential.
For one Debye’s process we can assume complex permittivity as
141
(30)
XXI Sympozjum PTZE, Lubliniec 2011
ˆ
1
j
0
(31)
1 j 1
where is the high-frequency limit of relative permittivity, 1 is the relaxation intensity, 1
the Cole–Cole parameter and 1 the relaxation time. Tissue parameters are taken from [3].
Temperature inside body is derived from the bioheat equation given by Pennes [5] as
1
T
(32)
kT bCbb (Tb T ) Qext Qmet
t
where T is the body temperature [K], Tb – blood vessel temperature [K], k – tissue thermal
conductivity [W/(m·K)], ρ – tissue density [kg/m3], ρb – blood density [kg/m3], C – tissue
specific heat [J/(kg·K)], Cb – blood specific heat [J/(kg·K)], ωb – blood perfusion rate [1/s],
Qmet – metabolic heat generation rate [W/m3], and Qext = ζ| Ê |2 – external heat sources
[W/m3].
C
Equations (1) and (3) with the appropriate initial and boundary conditions [4] are solved using
the finite element method. The obtained simulation results are presented in Fig.2.
Figure 2. Temperature distribution in the human thigh (left) and time dependence of the temperature in the
central point of the tumor (right).
142
XXI Sympozjum PTZE, Lubliniec 2011
References
[1]
[2]
[3]
[4]
[5]
[6]
Hiraoka M., Hiroi N., Kotsuka Y., Mitsumori M., Ohno S., Tanaka Y., ―Development of RF and
microwave heating equipment and clinical applications to cancer treatment in Japan‖, IEEE Trans
Microwave Theory Techn, 48(11), 2000, pp.1789–1799.
Hynynen K., Moros E.G., Roemer R.B., ―A comparison of bioheat transfer and effective conductivity
equation predictions to experimental hyperthermia data‖, ASME Heat Transfer Division, vol. 126, 1989,
pp. 11– 15.
Gabriel C., Gabriel S., Compilation of the dielectric properties of body tissues at RF and microwave
frequencies, Physics Department, King's College London, London WC2R 2LS, UK.
Gordon, R.G., Roemer, R.B., and Horvath, S.M., A mathematical model of the human temperature
regulatory system—transient cold exposure response, IEEE Trans. Biomed. Eng., 23, 434, 1976.
Pennes, H.H., Analysis of tissue and arterial blood temperatures in resting forearm, J. Appl. Physiol., 1, 93,
1948.
Pisa, S., Cavagnaro, M., Piuzzi, E., Bernardi, P., and Lin, J.C., Power density and temperature distributions
produced by interstitial arrays of sleeved-slot antennas for hyperthermic cancer therapy, IEEE Trans.
Microwave Theory Technol., 5, 2418, 2003.
143
XXI Sympozjum PTZE, Lubliniec 2011
ŚWIATOWE TENDENCJE WYKORZYSTANIA ENERGII
FOTOWOLTAICZNEJ
Lucjan Kurzak
Wydział Budownictwa
Politechnika Częstochowska
Zmniejszające się zapasy surowców energetycznych oraz coraz gorszy stan środowiska
naturalnego zmuszają do poszukiwania alternatywnych, odnawialnych źródeł energii.
Wykorzystanie jej nie powoduje żadnych efektów ubocznych ani emisji szkodliwych
substancji. Wykorzystanie nie zakłóca zasobów naturalnych, środowiska naturalnego,
krajobrazu oraz życia roślin i zwierząt. Zwiększa bezpieczeństwo energetyczne, a także
tworzy nowe miejsca pracy, przy okazji promując różne regiony. Do dalszego rozwoju
przyczyniają się także zobowiązania międzynarodowe dotyczące redukcji emisji do atmosfery
dwutlenku węgla.
Energia promieniowania słonecznego jest najbardziej atrakcyjną, z punktu widzenia
środowiska, energię odnawialną. Jest ona energią łatwo dostępną, ale charakteryzuje się małą
gęstością strumienia i dużą stochastycznością występowania. Olbrzymie zasoby energii
słonecznej, rozwijające się metody i technologie konwersji na inne użyteczne rodzaje
stanowią o jej perspektywicznym znaczeniu. Jednym z możliwych sposobów przetwarzania
na energie elektryczną jest wykorzystanie efektu fotowoltaicznego.
Efekt fotowoltaiczny, który jest wykorzystywany w ogniwach fotowoltaicznych, polega na
powstawaniu w nich siły elektromotorycznej w wyniku oddziaływania na półprzewodnik
promieniowaniem słonecznym. Energia promieniowania słonecznego zostaje przekształcona
bezpośrednio w energię elektryczną, bez jakichkolwiek reakcji chemicznych.
Rozwój fotowoltaiki rozpoczął się w latach sześćdziesiątych XX wieku, zainicjowany przez
badania kosmiczne, zaś kryzys energetyczny go przyspieszył. Całkowita światowa produkcja
modułów fotowoltaicznych dynamicznie rośnie w ostatnich dziesięcioleciach. Wzrost ten
wynika z rosnących potrzeb energetycznych oraz postępu w osiąganych sprawnościach
przetwarzania na energie elektryczną.
Ogniwa fotowoltaiczne znajdują zastosowanie w pięciu podstawowych obszarach:
urządzenia elektryczne powszechnego użytku (radia, zegarki, ładowarki, telewizory),
systemy wolnostojące (lampy, latarnie morskie, sygnalizatory, znaki ostrzegawcze)
systemy współpracujące z sieciami elektroenergetycznymi (zasilanie budynków
mieszkalnych, usługowych i użyteczności publicznej),
systemy hybrydowe (współpraca systemu fotowoltaicznego z generatorami
spalinowymi, gazowymi, wiatrowymi, a także kolektorami słonecznymi),
urządzenia w kosmonautyce (satelity, promy kosmiczne).
Ewolucje produkcji energii elektrycznej pochodzącej ze słońca na przestrzeni ostatnich
dwóch dekad obrazuje rys.1, który przedstawia światową produkcję modułów
fotowoltaicznych wykorzystywanych do produkcji energii elektrycznej.
144
XXI Sympozjum PTZE, Lubliniec 2011
14000
12000
10000
8000
6000
4000
2000
09
20
08
20
07
20
06
20
05
20
04
20
02
03
20
20
01
20
00
20
99
19
98
19
96
97
19
19
95
19
94
19
19
93
0
Źródło : opracowanie własne na podstawie danych : Photovoltaic Barometer . Instytut Energii Odnawialnej,
Baromet www.ieo.pl/eurobserver
Rys.1. Ewolucja światowej produkcji modułów fotowoltaicznych [MWp].
Widać z powyższego rysunku bardzo duże przyrosty roczne, które zwłaszcza w ostatnich
latach sięgają 50%. Do produkcji energii elektrycznej na świecie w 2009 roku
wykorzystywano moduły fotowoltaiczne o mocy 12 318 MWp . Również w Polsce, chociaż
w niewielkim stopniu w zestawieniu z możliwościami, następuje rozwój wykorzystanie
technologii fotowoltaicznych.
Jeśli rozważamy tylko koszt uzyskania wata mocy wyjściowej, energia elektryczna ze słońca
nie jest zbyt konkurencyjna i prawdopodobnie nieprędko będzie. Jeżeli jednak myślimy o
inteligentnych sieciach energetycznych ze zdolnością zarządzania wieloma rozproszonymi,
działającymi w sposób przerywany źródłami energii, wtedy energia słoneczna może być
dobrym rozwiązaniem.
Przed technologią fotowoltaiczną są stawiane coraz ambitniejsze cele, realizowane z
zastosowaniem najnowocześniejszych rozwiązań. Istnieją projekty pokrycia obszarów
pustynnych siecią elektrowni słonecznych, opartych na nowej generacji ogniw
cienkowarstwowych. Wg naukowców, aby zapewnić wystarczającą ilość energii elektrycznej
wszystkim odbiorcom na Ziemi, wystarczyłoby pokryć panelami fotowoltaicznymi tylko
kilka procent powierzchni wszystkich pustyń. Co prawda problem stanowią – oprócz zjawisk
klimatycznych, ruchomych piasków itp. – straty przesyłowe, ale możnaby je zmniejszyć przez
zastosowanie nadprzewodników.
Firma IOWA THIN FILM TECHNOLOGIES wyprodukowała elastyczne ogniwa słoneczne o
grubości zaledwie 0,05 mm. Produkowane metodami podobnymi do drukarskich, mogą
posłużyć w codziennym użytkowaniu podręcznych urządzeń elektrycznych. Zastosowanie
odpowiedniej technologii pozwala je także zastosować w tkaninach (rozwiązanie
amerykańskiej firmy KONARKA TECHNOLOGIES z zakresu nanotechnologii – ogniwa
słoneczne wbudowane bezpośrednio we włókna różnych materiałów tekstylnych mogłoby
posłużyć do produkcji odzieży, namiotów i parasoli generujących energię). Innym wyrobem
145
XXI Sympozjum PTZE, Lubliniec 2011
tej firmy jest giętka folia o właściwościach fotowoltaicznych, stosunkowo tania w produkcji,
elastyczna i lekka, co pozwala na pokrycie nimi dowolnej powierzchni.
Nanoogniwa zmieszane z lakierem samochodowym mogłyby w przyszłości umożliwić
doładowywanie energii do akumulatorów w samochodach z napędem hybrydowym (spalinowoelektrycznym), co ograniczałoby zużycie paliwa. Nad realizacją tych rozwiązań
z
wykorzystaniem nowych materiałów takich jak fullereny i przewodzące prąd polimery pracują
czołowe ośrodki świata, co może przyczynić się do ich powszechniejszego zastosowania.
Zarówno nowe rozwiązania materiałowe jak i technologiczne, rosnąca sprawność konwersji
energii słonecznej na elektryczną przy rosnących cenach jej pozyskania ze żródeł
konwencjonalnych, stawia przed fotowoltaiką olbrzymie perspektywy.
146
XXI Sympozjum PTZE, Lubliniec 2011
WPŁYW ODLEGŁOŚCI MIĘDZY PRZEDOWODAMI
A EKRANEM
NA POLE MAGNETYCZNE
EKRANOWANEGO DWUPRZEWODOWEGO
BIFILARNEGO TORU WIELKOPRĄDOWEGO
Dariusz Kusiak1, Zygmunt Piątek2, Tomasz Szczegielniak2
Politechnika Częstochowska
1
Wydział Elektryczny
2
Wydział Inżynierii i Ochrony Środowiska
Wprowadzenie
Rozpatrzmy pole magnetyczne w obszarze wewnętrznym ekranu dwubiegunowego toru
wielkoprądowego (rys. 1) z izolowaną osłoną dla przypadku przeciwnych prądów w
przewodach fazowych. Zmieniana będzie odległość d między osiami przewodów a osią
ekranu.
y’’
y
R1
y’
Her
HeΘ
rXZ
r
rXY
X
R1
Θ
γ1
Z
x’
Y
2
I2
R2
d
x
1
I1
d
γ2
R2
μ0
e
R4
R3
Rys. 1. Dwubiegunowy bifilarny tor wielkoprądowy
Pole magnetyczne w obszarze wewnętrznym ekranu
W przypadku dwubiegunowego toru wielkoprądowego z izolowaną osłoną całkowite pole
magnetyczne w obszarze wewnętrznym ekranu określone jest wzorem [1,2]
H
wew
(r , Θ) H 1
wew
(r , Θ) H 2 (r , Θ)
wew
Jeśli wprowadzimy względną odległość między przewodami a ekranem [3]
d
( 0 1)
R3
r
zmienną względną
R4
R
3
i parametr
przy czym 0 1
R4
147
(1)
(2)
(3)
(4)
XXI Sympozjum PTZE, Lubliniec 2011
wew
to wzory na składowe względne pola magnetycznego H 1 (r , Θ) w obszarze wewnętrznym
ekranu ( 0 r R3 lub 0 ) linii dwuprzewodowej dla I 2 I 1 I mają postać [4]:
n n p n-1
h ( , Θ) n 1 n ξ sin nΘ
n 1
dn
n
n
1 p n n-1
wew
h1Θ ( , Θ) n 1
ξ cos nΘ
n1
dn
wew
1r
oraz
(5)
(5a)
zaś składowe względne pola H 2wew (r , Θ) mają postać
n n p n-1
h ( , Θ) 1 n 1 n ξ sin nΘ
n 1
dn
n
n
p n n-1
1
wew
n
h 2Θ ( , Θ) 1 n 1
ξ cos nΘ
n 1
dn
p n I n 1 ( 2 j ) Kn 1 ( 2 j ) I n 1 ( 2 j ) Kn 1 ( 2 j )
wew
2r
oraz
gdzie
oraz
(6)
(6a)
(7)
d n I n 1 ( 2 j ) Kn 1 ( 2 j ) I n 1 ( 2 j ) Kn 1 ( 2 j )
W powyższych wzorach
I n1 ( 2 j ) ,
n
I n 1 ( 2 j ) ,
K n1 ( 2 j )
K n1 ( 2 j ) ,
I n1 ( 2 j ) ,
(7a)
K n1 ( 2 j ) ,
są zmodyfikowanymi funkcjami Bessela odpowiednio
pierwszego i drugiego rodzaju, rzędu n-1 oraz n+1, a k 2 R4 dla k 2
2
2
1
2
[5].
Wpływ odległości między osią przewodów a ekranem
Rozkład modułu całkowitego pola magnetycznego w obszarze wewnętrznym ekranu dla
różnych wartości parametru w funkcji kąta Θ przedstawiamy na rysunku 2.
Rys. 2. Rozkład względnej wielkości modułu całkowitego pola magnetycznego
w obszarze wewnętrznym ekranu linii dwuprzewodowej dla I 2 I 1 I
148
XXI Sympozjum PTZE, Lubliniec 2011
Wnioski
Z przedstawionego rozkładu całkowitego pola magnetycznego w dwubiegunowym bifilarnym
osłoniętym
torze
wielkoprądowym
oraz
analizy
otrzymanych
wzorów
i obliczeń numerycznych wynika, że w miarę wzrostu odległości λ między osią przewodów a
ekranem pole magnetyczne staje się coraz bardziej nierównomierne (rys. 2). Wzajemna
konfiguracja geometryczna między przewodem a ekranem silnie więc wpływa na całkowite
pole magnetyczne w tego typu torach wielkoprądowych.
Literatura
[1] Piątek Z.: Modelowanie linii, kabli i torów wielkoprądowych, Seria Monografie nr 130, Wyd. Pol. Częst.,
Czestochowa 2007.
[2] Piątek Z.: Impedances of Tubular High Current Busducts, Series Progress in High-Voltage technique, Vol.
28, Polish Academy of Sciences, Committee of Electrical Engineering, Wyd. Pol. Częst., Czestochowa
2008.
[3] Kusiak D.: Pole magnetyczne dwu i trójbiegunowych torów wielkoprądowych, Rozprawa doktorska, Pol.
Częst., Wydz. El., Częstochowa 2008.
[4] Piątek Z., Kusiak D., Szczegielniak T.: Pole magnetyczne przewodu ekranowanego, Przegląd
Elektrotechniczny, ISSN 0033-2097-6106, R. 85, Nr 5/2009, ss. 92-95.
[5] Piątek Z., Kusiak D., Szczegielniak T.: Influence of the screen on the magnetic field of the flat three phase
high current busduct, Przegląd Elektrotechniczny, R. 86, Nr 1/2010, ss. 89-91.
149
XXI Sympozjum PTZE, Lubliniec 2011
A COMPARISON OF MAGNETO-MECHANICAL
DEPENDENCIES OF A BRUSHLEES MOTOR WITH
PERMANENT MAGNET EXCITATION IN BLDC
AND PMSM MODES
Marek Lis
Częstochowa University of Technology
Summary: In the paper the magneto-mechanical dependencies of an electric motor with permanent magnets in its
rotor and three-phase stator winding are presented as dependencies of total magnetic coupling between electric
circuits of stator and electromagnetic moment on currents in these circuits and on the angle of rotor rotation. The
calculations were carried out for motors PMSg132 S4 BLDC and PMSg132 S4 PMSM. The results are presented
in the form of charts.
Introduction
The subject of the analysis are contactless electric motors with permanent magnets in their
rotors and with multi-phase stator winding, which differ in the design of excitation winding
and the method of its supply. These machines are referred to as PMSM (Permanent Magnet
Synchronous Motors) and BLDCM (ang. Brush-Less Direct Current Motors), according to
international terminology.
PMSMs are designed to work at sine supply from a voltage or current source, whose
frequencies and initial phases depend on the rotor rotation angle. Such method of supply is
referred to as continuous supply.
BLDCMs are machines, whose phases are supplied from a DC source in impulse-driven way ,
according to the rotor position. The shape of phase current in such a machien resembles a
trapeze. Such method of supply is referred to as discrete supply.
Different supply methods for PMSMs and BLDCMs as well as fundamentally different
application requirements results in their different designs, in particular in the setup of active
parts of the rotor.
Computer-aided simulations of motor operation have been carried out for two types of
motors: IPMSg132 S4 PMSM and PMSg132 S4 BLDC produced by BOBRME "Komel".
Table 1 includes nominal data concering the motors under research.
Table 1. Nominal data concerning the motors under research
Type of the motor
Power
Nominal voltage
Nominal current
Nominal velocity
Nominal moment
IPMSg 132 S4 PMSM
4 kW
3x400 V
7,5 A
1500 rotations per minute
25,5 Nm
150
PMSg132 S4 BLDC
4 kW
3x400 V
11,5 A
1500 rotations per minute
25,5 Nm
XXI Sympozjum PTZE, Lubliniec 2011
Figure 1 depicts exemplary results. In the Figure time dependencies of phase electromotoric
forces e1, e2 , e3 under conditions of idle run and rotor rotation velocity equal to 1500 rpm
are presented.
e1, V (BLDS)
e1, V (PMSM)
e, V
e2, V (BLDS)
e2, V (PMSM)
e3, V (BLDS)
e3, V (PMSM)
250
200
150
100
50
0
-50
-100
-150
-200
-250
0
0,004
0,008
0,012
Fig. 1. Time dependencies of phase electromotoric forces
0,016
0,02
t, s
e1, e2 , e3 under conditions of idle run and rotor
rotation equal to 1500 rpm for machines PMSg132 S4 BLDC and
IPMSg 132 S4 PMSM
On the basis of the results presented in Figure1 it can be stated, that the shape of electromotoric force in a PMSM motor resembles sine wave, due to the special design of the rotor, in
which the field from permanent magnets is partially screened by the ferromagnetic core of the
rotor. In this case the distribution of radial component of magnetic induction vector in the air
gap is close to a harmonic one, however it possesses a significant zero order harmonic.
A BLDC motor exhibits a trapeze-like shape of electromotoric force, which is well suited to a
control discrete method, ie. such shape of electromotoric force allows us to diminish the
pulsations of electromagnetic moment in the permanent magnet machine.
151
XXI Sympozjum PTZE, Lubliniec 2011
APROKSYMACYJNY MODEL PĘTLI HISTEREZY
DLA MODELI NUMERYCZNYCH
OBWODÓW NIELINIOWYCH
Michał Łanczont
Politechnika Lubelska
Wydział Elektrotechniki i Informatyki
Instytut Podstaw Elektrotechniki i Elektrotechnologii
Modelowanie numeryczne elektrycznych obwodów nieliniowych zawierające elementy
ferromagnetyczne wymaga uwzględnienia charakterystyki magnesowania takiego elementu.
Stosowane modele, Jilesa-Athertona, Chana-Vladimirescu, Hodgdona czy Preisacha są
złożonymi i skomplikowanymi wymagającymi znajomości rozbudowanego aparatu
matematycznego.
Stosując krzywą pierwotną magnesowania w budowanych modelach numerycznych uzyskuje
się wyniki o stosunkowo zadowalającej dokładności. Krzywą taką można aproksymować za
pomocą:
1. Wielomianu – dobrze oddaje pierwotny przebieg w części narastającej, w nasyceniu
pojawiają się pewne oscylacje
2. Funkcji Asinh – dość dobrze odwzorowuje przebieg krzywej magnesowania, jednakże
w niektórych przypadkach uzyskiwany kształt dla stanu nasycenia jest zbyt mocno
rosnący
3. Funkcja Atan – wydaje się że jest to funkcja najlepiej oddająca kształt krzywej
magnesowania, jednakże w pewnych przypadkach dla niskich wartości natężenia pola
kształt w sposób znaczący odbiega od wzorca
4. Funkcja Atan3 – zmodyfikowanie modelu 3. poprzez podniesiecie funkcji Atan do
sześcianu zapewni dokładniejsze odwzorowanie początkowej części charakterystyki
magnesowania.
Korzystając z aproksymacji Atan krzywej magnesowania opracowano prosty model dławika.
Uzyskane wyniki symulacji zaprezentowano na Rys.1. Jak można zauważyć uzyskane wyniki
z zadowalającym przybliżeniem oddają kształt rzeczywistych przebiegów.
Rys. 2 Przebiegi napięć i prądu uzyskane z modelu symulującego
załączenie dławika
152
XXI Sympozjum PTZE, Lubliniec 2011
Wydaje się że możliwe jest uzyskanie za pomocą aproksymacji Atan i Atan3 modelu
pętli histerezy, jak pokazano na Rys. 2, umożliwi uzyskanie modeli numerycznych
elektrycznych obwodów nieliniowych w sposób bardzo dokładny oddających obwody
rzeczywiste. Model opierał się będzie na układzie równań.
Rys. 3 Wizualizacja modelu pętli histerezy
Literatura
[1] Baron B., Marcol A., Pawlikowski S., Metody numeryczne w Delphi 4, Helion, Gliwice, 1999
[2] Campbell S. L., Chancelier J. P., Nikoukhah R., Modeling and simulation in scilab/scicos, Springer, New
York, 2006
[3] Krakowski M., Elektrotechnika teoretyczne – obwody liniowe i nieliniowe, PWN, Warszawa, 1995
[4] Kudrewicz J., Nieliniowe obwody elektryczne, Wydawnictwo Naukowo-Techniczne, Warszawa, 1996
[5] Marciniak A., Gregukec D., Kaczmarek J., Podstawowe procedury numeryczne w języku turbo Pascal,
Nakom, Poznań, 2000
[6] Povstenko J., Wprowadzenie do metod numerycznych, Akademicka Oficyna Wydawnicza EXIT,
Warszawa, 2002
153
XXI Sympozjum PTZE, Lubliniec 2011
THE IMPACT OF 50HZ OSCILLATING
ELECTROMAGNETIC FIELD ON HSP90 EXPRESSION
IN HUMAN PLACENTA COTYLEDON PERFUSED IN VITRO
Maciej Łopucki1, A. Nowakowski1 W.Rogowska1, Stanisław Pietruszewski2
1
2
Medical University, Ist Department of Oncology Gynecology and Gynecology, Lublin
Agricultural University, Department of Physics, Faculty of Production Engineering, Lublin
Introduction
The exposure to magnetic fields (MFs) with flux densities in the milli Tesla (mT) range and
50Hz frequency generated by modern electric tools and devices accompanies humans during
fetal life and from the moment of birth to death. The effects of this exposure on human
placenta, the crucial organ for fetal in utero development and growth are unknown. in vivo
studies on this topic are both difficult to design and ethically controversial.
Heat shock proteins (HSPs) are activated in the response of cells to sublethal heat shock and
other stressors. HSP90 constitutes a group of proteins which have been shown to be necessary
for viability of cells in higher eukaryotes. It associates with other chaperone proteins to
catalyze the maturation and/or activation of over 100 target proteins which are involved in
cell regulatory pathways. It has been reported that HSP90 is expressed in normal human
placenta and it is expected that together with other HSPs it plays a role in the demonstration
of cell viability and function of placental cells. Expression pattern of HSP90 is altered in
pathological sections of placentas from pregnancies complicated by fetal intrauterine growth
restriction (IUGR) compared to control normal placentas. Increased expression of HSP90 was
noticed in chorionic villi of first trimester missed miscarriages compared to full-term
placentas. Data on the influence of low frequency MF on Heat Shock Protein (HSP)
expression are scarce and inconclusive.
Due to the lack of literature data, the aim of our study was to determine the effect of low
intensity 50 Hz oscillating MF on the expression of HSP90 in human placenta under the
conditions of in vitro perfusion.
Materials and methods
The study material consisted of 40 human placentas from physiological pregnancies of 37-41
weeks gestation obtained from the 1st Department of Obstetrics and Pathology of Pregnancy
of Medical University in Lublin, Poland. Placentas from women with pathological course of
pregnancy or labour and from pregnancies with neonatal weight <2500 or >4500g were not
included in the study. The placentas were from pregnancies ended by either vaginal delivery
or by elective cesarean section and transported immediately to perfusion laboratory.
The experiments were carried out in four groups of 10 placentas each: control group (C) –
sham exposed placenta cotyledons, experimental groups: E1, E2, E3 – cotyledons exposed to
0.5mT (50Hz), 2 mT (50Hz) and 5mT (50Hz) homogenous oscillating sinusoidal MF
respectively for 180 minutes.
154
XXI Sympozjum PTZE, Lubliniec 2011
Immediately after 180 minutes of perfusion tissue sections of placenta cotyledons were
prepared, fixed in 10% buffered formalin and embedded in paraffin. 5-µm paraffin sections
were placed on the silane-covered glass slides, deparaffinized in xylene and alcohols and
rehydrated in deionised water. Endogenous peroxidase was blocked by incubation in 3%
hydrogen peroxide for 30 minutes. For antigen retrieval the sections were incubated in the
700W microwave in 10mM citrate buffer, pH 6.0 twice for 7minutes. After washing with PBS
the slides were incubated in 1:100 solution of primary mouse monoclonal antibody against
human HSP90 (clone JPB 24; Novocastra Labs., UK) for 24h in a humid chamber at 40 C.
The Vectastain ABC kit (Vector Laboraatories Inc., USA) was used for visualisation
according to manufacturer’s protocol and specimens were counterstained with the Mayer’s
hematoxylin. The proliferative phase mucosa of the uterine cavity was used as the positive
control; in the
negative control, the primary antibody was neglected.
In each group, in the placenta specimens the expression of HSP90 was evaluated under light
microscope in the nuclei and cytoplasm of the trophoblast, endothelial cells, Hofbauer cells
and decidua according to the scale of Shah et al. [1998; 509]: (-) not stained, (+) just
detectable staining, (++) faintly stained and (+++) very well stained. Twenty fields were
assessed in each specimen.
Results
The pattern of staining observed in all 10 specimens in each group was consistent. Expression
of HSP90 in placental endothelial nuclei was higher in group E3: (++) in comparison to
control group C: (+) and remaining groups E1: (+) and E2: (+). No differences were observed
in the expression of HSP90 in the cytoplasm: (++) and nuclei: (+++) of trophoblast cells,
cytoplasm: (+) and nuclei: (++) of Hofabauer cells and cytoplasm: (++) and nuclei: (+++) of
deciduas cells between the studied groups (Table 1).
Table.1. An increase in HSP90 expression assessed as ++ in endothelial nuclei of human placental villi exposed
to a 5mT(50Hz) variable homogeneous sinusoidal magnetic field after 180-minute perfusion in vitro (specimen
no. E3/7/8). Magnification – x 200
Morphologic elements of
human placenta
Trophoblast
*Cytoplasm
*Nucleus
Endothelium
*Nucleus
Hofbauer cells
*Cytoplasm
*Nucleus
Decidua
*Cytoplasm
*Nucleus
C
Groups
E1
E2
E3
++
+++
++
+++
++
+++
++
+++
+
+
+
++
+
++
+
++
+
++
+
++
++
+++
++
+++
++
+++
++
+++
Symbols used in the table:
The degree of a reaction increase evaluated according to the following scale: (-) lack
of HSP90 expression, (+) – poor expression, (++) – medium intensity, (+++) – strong
reaction. C – control group ( human placental lobules perfused in vitro not exposed to VHSMF)
E1 – experimental group (human placenta lobules perfused in vitro exposed to a 0.5mT, 50Hz VHSMF)
E2 – experimental group (human placenta lobules perfused in vitro exposed to a 2mT, 50Hz VHSMF)
155
XXI Sympozjum PTZE, Lubliniec 2011
E3 – experimental group (human placental lobules perfused in vitro exposed to a 5mT, 50Hz VHSMF)
Conclusions
3 hour exposure of human placenta perfused in vitro to 50 Hz 5mT EMF increases the
expression of HSP90 in endothelial cells nuclei. Because direct studies of EMF action on the
organism of pregnant women and fetus are ethically unjustified we postulated that pregnant
women should avoid exposure to 50 Hz EMF field especially of higher densities as this may
cause stress reaction of placental cells with unknown consequences on maternal and fetal
well-being.
156
XXI Sympozjum PTZE, Lubliniec 2011
ANALIZA ZABURZEŃ PROMIENIOWANYCH
REAKTORA PLAZMOWEGO TYPU GLIDARC
Paweł A. Mazurek
Politechnika Lubelska,
Instytut Podstaw Elektrotechniki i Elektrotechnologii
Rozwijająca się od XIX wieku gospodarka światowa, nie tylko w branży elektrycznej, jest
przyczyną znacznej degradacji środowiska naturalnego. Negatywne oddziaływania odnoszą
się zarówno do wody, gleby jak i powietrza. Priorytetem stają się więc badania, które
poszukują skutecznych metod utylizacji zanieczyszczeń. W ostatnich latach wzrosło
zainteresowanie utylizacją zanieczyszczeń gazowych powstających m.in. w procesach
przemysłowych metodami plazmo-chemicznymi, bazującymi na wykorzystaniu nietermicznej
plazmy. Źródłem nietermicznej, nierównowagowej plazmy są reaktory plazmowe.
Jednym z typów reaktorów plazmowych jest reaktor z wyładowaniem łukowym ślizgającym
się wzdłuż elektrod o technologicznej nazwie GlidArc. Instytut Podstaw Elektrotechniki i
Elektrotechnologii Politechniki Lubelskiej posiada taki reaktor. Powstające w nim quasiłukowe wyładowanie jest źródłem plazmy nietermicznej wypełniającej część przestrzeni
komory wyładowczej. Źródłem plazmy i sposobem dostarczania do niej energii jest
wymuszony przepływ prądu elektrycznego w gazie. Plazma to zjonizowany gaz, który
przewodzi prąd elektryczny i tę właściwość wykorzystuje się przy wytwarzaniu plazmy
łukowej. Po zainicjowaniu łuku elektrycznego jest on podtrzymywany przez przepływający
przez gaz prąd elektryczny i umożliwia wykorzystywanie go jako źródła plazmy.
Z samej zasady działania reaktora plazmowego można stwierdzić, że jest on źródłem
zaburzeń zarówno w postaci pola elektromagnetycznego rozłożonego przestrzennie wokół
komory wyładowczej jak i źródłem zaburzeń oddziaływujących poprzez tor zasilania na
lokalny system energetyczny. Występujące, niezaekranowane wyładowanie łukowe
wysokiego napięcia w lokalnej przestrzeni oddziałuje na pracujące w najbliższym otoczeniu
inne urządzenia. Sytuacja ta wymusza wzrost zainteresowania problematyką harmonijnej
pracy reaktora w środowisku innych urządzeń i systemów elektro-energetycznych.
Analizie poddano zaburzenia promieniowane mierzone w zakresie 30MHz – 3GHz. Zgodnie
z wytycznymi unijnej dyrektywy EMC, układ reaktora plazmowego należy traktować jako
instalacje stałą. Zgodność z wymaganiami zasadniczymi wykazuje się poprzez zastosowanie
procedury oceny emisyjności w miejscu zainstalowania. Pomiar emisyjności zaburzeń
sprowadza się do określenia natężenia pola elektromagnetycznego na kierunku
maksymalnego promieniowania.
Głównymi elementami systemu pomiarowego był pomiarowy odbiornik zakłóceń oraz zestaw
anten pomiarowych. Pomiarowy odbiornik zakłóceń (użyto odbiornika ESCI3 RohdeSchwarz) – zgodny z wymogami CISPR 16, zapewnia powtarzalność i porównywalność
pomiarów. Szerokopasmowe anteny stosowane do pomiaru pola elektromagnetycznego
promieniowanego spełniają następujące warunki: są spolaryzowane liniowo, tłumią składową
o polaryzacji ortogonalnej co najmniej 20dB, a krzywa kalibracji anteny umożliwia pomiar
natężenia pola z błędem nie większym niż ±3dB. Metodę pomiarową oraz strukturę samego
stanowiska pomiarowego oparto na normie CISPR 16.
157
XXI Sympozjum PTZE, Lubliniec 2011
W niniejszym badaniu analizowany jest reaktor o konstrukcji trzech roboczych elektrod i
jednej zapłonowej. Pracujące trzy stalowe, duże i płaskie elektrody robocze rozmieszczone są
symetrycznie wewnątrz rurowej komory wyładowczej co 120 stopni. Centralnie, na
wysokości podstawy elektrod roboczych umieszczone są dwie, krótkie wolframowe elektrody
zapłonowe. Pełnią one rolę elektrod pomocniczych, a ich zadaniem jest wstępna jonizacja
przestrzeni międzyelektrodowej i zainicjowanie wyładowania łukowego
Zaprezentowane zostaną wyniki zmierzonej emisji promieniowanej oraz ich odniesienie do
dopuszczalnych limitów. Testom poddany został układ pracujący w kilku konfiguracjach:
różnych prądach roboczych reaktora oraz w różnych gazach roboczych podawanych do
komory plazmowej.
Rys.1. Badanie emisji elektromagnetycznej reaktora plazmowego (anteny pomiarowe działające w trzech
podzakresach 30-300MHz 0,3-1GHz, 1-3GHz)
Praca reaktora w różnych gazach jest różna, nawet wizualnie inaczej pali się łuk. Łuk plazmy
w powietrzu ma łagodniejszy charakter, wygląd plazmy jest bardziej rozmyty. Plazma w
argonie ma bardziej ostry charakter, czasami wręcz iskrowy. Zaobserwowano w argonie
większe poziomy zaburzeń. Szczególnie duże rozbieżności są w niższych częstotliwościach –
sięgają do 20%. W zakresie wysokich częstotliwości zaburzenia są już bardziej zbieżne ze
sobą. W obydwu jednak gazach dopuszczalne limity są przekroczone. Dodatkowo, wzrost
prądu również w przypadku atmosfery argonu zwiększa poziom istniejących zaburzeń
bardziej niż w powietrzu. Pełna analiza otrzymanych doświadczalnie wyników zostanie
zawarta w pełnej wersji artykułu.
158
XXI Sympozjum PTZE, Lubliniec 2011
Rys.2. Reaktor plazmowy typu GlidArc, Instytut Podstaw Elektrotechniki i Elektrotechnologii oraz wartości
natężenia pola elektrycznego przy włączonej instalacji reaktora plazmowego, (polaryzacja H, wartości mierzone
detektorem maxpeak i average)
Literatura
[1] Janowski T., Stryczewska H. D.: Zasilacz reaktora plazmowego, Patent Nr 193498.
[2] Stryczewska H. D.: Technologie plazmowe w energetyce i inżynierii środowiska. Wydawnictwo
Politechniki Lubelskiej, Lublin 2009.
[3] Wac-Włodarczyk A., Stryczewska H. D., Mazurek P.A., Komarzyniec G.: Analiza zaburzeń
elektromagnetycznych emitowanych przez urządzenia plazmowe, XXVIII Międzynarodowa Konferencja
IC-SPETO, Ustroń, 11–14.V.05, str. 183-186.
[4] Mazurek P.A.: Rozkład emisji pola elektrycznego i magnetycznego wokół reaktora plazmowego typu
Glidarc, Przegląd Elektrotechniczny, R. 86 NR 12/2010, 95-98.
[5] Mazurek P.A.: Wprowadzenie do badań zaburzeń przewodzonych w instalacji reaktora plazmowego,
Elektro.info, ISSN 1642-8722, 12/2010, str. 32-34.
[6] Mazurek P.A.: Raport końcowy projektu badawczego N N510 349936, Politechnika Lubelska, Instytut
Podstaw Elektrotechniki i Elektrotechnologii.
159
XXI Sympozjum PTZE, Lubliniec 2011
MAGNETIC FLUID HYPERTHERMIA
FOR CANCER THERAPY
Arkadiusz Miaskowski1, Andrzej Krawczyk2
1
University of Life Sciences in Lublin,
Department of Applied Mathematics and Computer Science,
2
Czestochowa University of Technology
1. Introduction
Application of heat for a wide variety of medical conditions is a very old medical therapy, but
the use of electromagnetic filed to create this heat is relatively new. That is why, the aim of
the paper is to introduce basic concepts of hyperthermia with special focus on magnetic fluid
hyperthermia, as an example of the advantages of employing electromagnetic energy for
heating tissues.
There are three main approaches to hyperthermia treatments i.e. whole-body hyperthermia,
regional and localized hyperthermia. The whole-body hyperthermia raises the temperature of
the entire body to nearly 420C, and it is often uncomfortable for the patients due to high
temperature gradients. Besides, the tumors may not reach sufficiently high temperatures.
Regional hyperthermia attempts to heat moderately large volumes, such as thorax or pelvis
including the cancerous region as well as surrounding healthy tissues. The remainder of the
body is kept as close to normal temperature as possible. Localized hyperthermia heats mainly
the tumors and it is mainly used for superficial tumors [1].
The above three types of hyperthermia are connected with serious engineering challenges to
provide uniform heating throughout the target volume to ensure that all cancerous tissues
reach therapeutic temperature and achieve adequate temperature in deep tumors without
overheating the body surface. Recently, magnetic fluid hyperthermia has offered some
attractive possibilities to overcome some engineering problems remaining in hyperthermia
[2].
Magnetic fluid hyperthermia, which is the combination of inductive applicator and magnetic
fluid (nanoparticles) injected into cancerous tissue, has attracted much attention because of
their considerable heating effects in time-varying magnetic field (Fig. 1). It can increase the
temperature in tumours to 43-480C, and therefore leads to apoptosis. According to cancer
therapy it seems that magnetic fluid hyperthermia may become one of the forefront
applications of bioelectromagnetics.
Fig. 1. Low frequency hyperthermia idea – the magnetic fluid injected into cancerous tissue and then external
magnetic field is applied.
160
XXI Sympozjum PTZE, Lubliniec 2011
2. Heating mechanisms
The mechanism of heat deposition in tissues by electromagnetic field can be expressed as
factors of power density (pe) and eddy currents phenomenon as follows:
pe
J
2
(1)
where is the conductivity of tissues [S/m] and J is a current density vector.
The physical basis of the heating of magnetic particles by AC magnetic fields has been
reviewed by Rosensweig [3]. It is based on the Debye model, which was originally developed
to describe the dielectric dispersion in polar fluids [4]. For small amplitudes, assuming
minimal interactions between the constituent particles, the response of the magnetization of a
ferrofluid to an AC field can be described in terms of its complex susceptibility χ = χ’+iχ’’,
where both χ’ and χ’’ are frequency dependent. The out-of-phase χ’’ component results in heat
generation given by [3]:
P 0f '' H 02
(2)
where:
''
1 1
1
and
0
B N
1 ( ) 2
and is effective relaxation time understood as the inverse sum of Brownian and Neel
processes, which take place parallel.
Measurements of the heat generation from magnetic particles are usually quoted in terms of
the specific absorption rate (SAR) in units of Wg−1. Multiplying the SAR by the density of the
particle yields P [Wm-3], so the parameter allows comparison of the efficiency of magnetic
particles covering all the size ranges of nanoparticles.
On the other hand, as it can be found in [1] power losses in magnetic nanoparticles can be
expressed as follows:
Q km f Dw B 2
W
ml
(3)
where: km = 2.410-3 [W/Hz/(mgFe/ml)/T2/ml], f – exciting frequency of applied field [Hz], B
– external magnetic field [T], Dw – weight density of magnetic fluid [mgFe/ml].
The paper aims at comparing the above two models.
Literature
[1] Miaskowski A., Sawicki B., Krawczyk A., Yamada S., The application of magnetic fluid hyperthermia to
breast cancer treatment, Electrical Review, pp. 99-101, 12/2010.
[2] A. Jordan., at al., ―Presentation of a new magnetic field therapy system for the treatment of human solid
tumors with magnetic fluid hyperthermia‖, Journal of Magnetism and Magnetic Materials, vol. 225, pp.
118-126, 2001.
[3] Rosensweig, R. E., Heating magnetic fluid with alternating magnetic field, J. Magn. Magn. Mater. vol.
252, pp. 370–4, 2002
[4] Pankhurst Q. A. at al, Applications of magnetic nanoparticles in biomedicine, J. Phys. D: Appl. Phys. 36,
R167–R181, 2003.
161
XXI Sympozjum PTZE, Lubliniec 2011
TWO-STEP INVERSE PROBLEM ALGORITHM FOR
GROUND PENETRATING RADAR TECHNIQUE
Arkadiusz Miaskowski1, Sławomir Cięszczyk2
1
University of Life Sciences in Lublin
2
Lublin University of Technology
Ground penetrating radar (GPR) is a non-destructive technique for investigating hidden
objects. It detects changes in the electromagnetic properties of materials, principally the
permittivity, and is capable of producing cross-sectional representations of what is beneath
surfaces [1,2,3,5]. This idea is shown schematically in Fig. 1.
Fig.1. The idea of GPR technique
From Fig. 1 it can be seen that acquiring information from GPR is based on inverse problem
solution. There are two main methods of solving such ill-posed inverse problems [4]:
Statistical approach – which consists in using prepared database with a forward model
calculation to learn the statistical model which maps the artificial measurement data to
solution space;
Physical approach – which consists in iterative optimization process of calculating the
forward model and minimising the difference between the calculated and measured
data.
Moreover, the method of signal processing used to solve the inverse problem in GPR imaging
can be divided into three categories [7]:
Pattern matching method which is mainly based on neural networks;
Image-then-detect method which is some kind of tomography;
Statistical signal processing method.
In our study we have proposed a new method consisting of two steps. First, the method of
signal enhancing is used, and then the statistical method based on artificial intelligence is
applied to estimate the required parameters.
162
XXI Sympozjum PTZE, Lubliniec 2011
In this work the authors have used the Finite-Difference Time-Domain (FDTD) method to
numerically describe the basic ideas of GPR technique i.e. to generate synthetic data and then
they have used the data to solve the inverse problem.
In order to consider the problem numerically some assumptions for the modeling of GPR in
two dimensions are necessary:
a) all media are considered to be linear and isotropic;
b) the transmitting antenna is modelled as a line source, which is a consequence of the
assumption of the invariance of the problem in one direction.
In our case the model under consideration was as follows (see Fig. 2):
medium no 1 – concrete with r = 6, = 0.1 S/m and dimensions 600x600 mm ;
medium no 2 – rebar as perfect electric conductor (PEC) with diameter 50 mm;
excitation – line source with fc = 900 MHz.
Fig. 2. Schematic drawing of the PEC in concrete (the model under consideration) [6].
Literature
[1] Gordon M.O., Broughton K., Hardy M.S.A., The assessment of the value of GPR imaging of flexible
pavements, NDT&E, 31 (1998), 429-438
[2] Loizos A., Plati Ch., Accuracy of pavement thicknesses estimation using different ground penetrating radar
analysis approaches, NDT&E, 40 (2007), 147-157
[3] Saarenketo T., Scullion T., Road evaluation with ground penetrating radar, Journal of Applied Geophysics,
43 (2000), 119–138
[4] Sbartai Z.M., Laurens S., Viriyametanont K., Balayssac J.B., Arliguie G.: Non-destructive evaluation of
concrete physical condition using radar and artificial neural networks, Construction and Building Materials
23, 2009, pp. 837-845.
[5] Miaskowski A., Bochniak A., Krawczyk A., Wac-Włodarczyk A., Dielectric constant and layer thickness
estimation of pavements using GPR technique, Przegląd Elektrotechniczny, NR 12/2008, pp. 210-212
[6] Giannopoulos A., GprMax2D/3D v.2.0, User’s Manual (2005)
[7] X. Xu, E. Miller, C. Rappaport, G. Sower: Statistical Method to Detect Subsurface Object Using Array
Ground-Penetrating Radar Data, IEEE Transaction on Geosciences and Remote Sensing Vol. 40, No. 4,
2002, pp. 963-976.
163
XXI Sympozjum PTZE, Lubliniec 2011
METODY WSPOMAGAJĄCE I UZUPEŁNIAJĄCE DETEKCJĘ
RAKA GRUCZOŁU PIERSIOWEGO
Joanna Michałowska1, Arkadiusz Miaskowski2, Andrzej Wac-Włodarczyk1
1
Politechnika Lubelska, Instytut Podstaw Elektrotechniki i Elektrotechnologii,
Uniwersytet Przyrodniczy w Lublinie, Katedra Zastosowań Matematyki i Informatyki
2
Rak sutka jest najgroźniejszym, złośliwym nowotworem wśród kobiet. W Polsce jest on na
pierwszym miejscu zachorowań jak i przyczyn zgonów z powodu nowotworu u kobiet [3].
Rys. 1. Zachorowalność na nowotwory złośliwe wśród kobiet w 2008r.w Polsce
Mimo dynamicznego rozwoju metod diagnostycznych (mammografii, USG i rezonansu
magnetycznego) i stałego postępu w rozwoju terapii sytuacja ta zmienia się w niewielkim
stopniu, a współczynnik zachorowalności nadal ulega ciągłemu zwiększeniu [2].
a)
b)
Rys. 2. Statystyka raka gruczołu piersiowego: a) zachorowalność, b) śmiertelność
Rak sutka jest nowotworem o długiej fazie przedklinicznej. Rokowanie w raku sutka zależy
od stopnia zaawansowania, ale istnieje wyraźna zależność między wielkością zmiany
a okresem wystąpienia objawów rozprzestrzeniania się raka. Dlatego ciągle poszukuje się
nowych metod jego wykrywania oraz leczenia. Jedną z nich jest tomografia mikrofalowa,
która ma na celu wspomóc działania diagnostyczne w medycynie i być użyteczna
w wykrywaniu zmian nowotworowych o średnicy poniżej 5mm (przypadki takie uznawane są
za uleczalne).
164
XXI Sympozjum PTZE, Lubliniec 2011
Artykuł ma na celu zaprezentowanie wybranych metod alternatywnych i wspomagających
mammografię, ze szczególnym uwzględnieniem tomografii mikrofalowej. Ponadto,
przedstawiono krótki opis podstaw fizycznych leżących u podstaw każdej z wymienianych
metod oraz uwzględniono ich wady i zalety.
Do metod wspomagających badania mammograficzne gruczołu piersiowego zaliczamy m.in.
[1,2,4,5,6]:
technikę dopplerowską,
galaktografię (duktografię),
mammoscyntygrafię,
termografię,
tomografię optyczną,
tomografię mikrofalową.
Literatura
Champton S., Nakielny R. „ Metody obrazowania radiologicznego‖, Medyczna Praktyka, Kraków 2006,
Deptała A. „ Onkologia w praktyce‖, Wydawnictwo Lekarskie PZWL, Warszawa 2006,
http://epid.coi.waw.pl,
Jassema J. „Rak sutka‖ PWN Springer, Warszawa 2004,
Miaskowski A.,, Zastosowanie mikrofal do detekcji raka sutka‖, Przegląd Elektrotechniczny, 12/2005, str
88-87,
[6] Sikora J., „Boundary Element Method for Impedance and Optical Tomography‖, str.13-21, OWPW,
Warszawa 2007.
[1]
[2]
[3]
[4]
[5]
165
XXI Sympozjum PTZE, Lubliniec 2011
ZJAWISKO GIGANTYCZNEJ MAGNETOIMPEDANCJI
W ZASTOSOWANIACH PRAKTYCZNYCH
Mariusz Najgebauer
Politechnika Częstochowska, Instytut Elektroenergetyki
W latach 80-tych ubiegłego wieku zaobserwowano zjawisko, polegające na dużych zmianach
impedancji elementu ferromagnetycznego przewodzącego przemienny prąd elektryczny pod
wpływem zewnętrznego pola magnetycznego. Zjawisko to zostało nazwane Gigantyczną
Magnetoimpedancją, GMI (ang. Giant Magneto-Impedance) [1,2]. Źródłem zjawiska GMI
jest efekt naskórkowości. Zjawisko GMI jest charakteryzowane przez współczynnik zmian
impedancji (współczynnik GMI), w postaci:
Z H 0 Z H 0 max
Z
(%)
100%,
Z
Z H 0 max
(1)
gdzie: |Z| – moduł impedancji, H0 – stałe, zewnętrzne pole magnetyczne, H0max – maksymalna
wartość pola odpowiadająca nasyceniu próbki.
W latach 90-tych zjawisko GMI zostało zaobserwowane materiałach magnetycznych,
charakteryzujących się wysokimi wartościami konduktywności. Przenikalność magnetyczna
tych materiałów może być zmieniona wyniku oddziaływanie stałego pola magnetycznego, co
prowadzi do zmiany współczynnika wnikania , a tym samym zmiany impedancji materiału.
Zjawisko GMI jest obserwowane w bardzo miękkich materiałach magnetycznych, takich jak
taśmy i włókna amorficzne, taśmy nanokrystaliczne, miękkie ferryty czy kompozytowe
proszkowe materiały magnetyczne. Obserwowane zmiany impedancji są szczególnie duże w
przypadku materiałów amorficznych. Zjawisko GMI w tych materiałach występuje w zakresie
częstotliwości 100 kHz – 10 MHz. Stwierdzono, że w przypadku włókien amorficznych
współczynnik GMI może osiągać wartości rzędu 600%, przy częstotliwościach około 1 MHz
i dla maksymalnego pola H0max rzędu 1000 A/m [3-6].
Zjawisko GMI znalazło praktyczne zastosowanie między innymi w czujnikach pola
magnetycznego, czujnikach położenia, biosensorach, czujnikach do badań nieniszczących.
Czujniki pola magnetycznego
Pomiary pól magnetycznych są zagadnieniem bardzo istotnym we współczesnej metrologii.
Obecnie istnieje wiele typów czujników do pomiarów magnetycznych, przy czym ich wybór
uwarunkowany jest wielkością mierzonego pola magnetycznego:
pola średnie do dużych: czujniki Halla oraz GMR,
pola małe do średnich: czujniki GMI oraz FluxGate,
pola bardzo małe do małych: czujniki SQUID [6].
Czujniki GMI w porównaniu do czujników FluxGate charakteryzują się znacznie mniejszym
zużyciem energii oraz do 20 razy mniejszą długością głowicy. W chwili obecnej do budowy
166
XXI Sympozjum PTZE, Lubliniec 2011
czujników GMI stosuje się głównie dwie technologie, wykorzystujące druty lub cienkie błony
amorficzne [6,7,8].
Czujniki położenia
Zjawisko GMI zostało wykorzystane również czujnikach położenia. W większości
przypadków, określenia położenia obiektu odbywa się poprzez oszacowanie wartości pola
magnetycznego magnesu przymocowanego do badanego obiektu. Przykładowy system do
określania położenia może składać się z ruchomego obiektu z magnesem stałym, generatora
sygnału oraz obwodu detekcyjnego z drutem amorficznym. Przemieszczenie obiektu,
powoduje zmianę wartości pola magnetycznego magnesu. Zmiana ta jest wykrywana przez
czujnik, co umożliwia lokalizację obiektu [9,10].
Biosensory
We współczesnej medycynie dąży się do bezinwazyjnego badania i monitorowania stanu
zdrowia pacjenta. W celu dotarcia do objętych chorobą części ciała, takich jak naczynia
krwionośne, oskrzela, żołądek, dwunastnica, często wykorzystywany jest cewnik. W celu
sprawdzenia położenia wprowadzonego do organizmu cewnika stosuje się rentgenoskopię, co
ma negatywny wpływ na pacjenta i personel medyczny. Wykorzystanie czujników GMI
umożliwia monitorowania położenie cewnika w ciele pacjenta bez konieczności
wykorzystania promieni rentgenowskich. Czujniki te charakteryzują się również niskim
zużyciem energii (10 mW), wysoką czułością (10-10 T), dużą szybkość reakcji (10 MHz) oraz
małymi rozmiarami (< 2 mm) [11,12].
Czujniki do badań nieniszczących
Techniki nieniszczących badań obiektów (NDT) zdobywają w ostatnich latach coraz większą
popularność. Wynika to z możliwości sprawdzenie obiektu podczas jego eksploatacji.
Techniki NDT oparte są na odpowiedzi badanego obiektu na promieniowanie rentgenowskie
lub gamma, ultradźwięki, prądy wirowe, rezonans (termiczny, chemiczny, magnetyczny) bądź
rozpraszaniu strumienia magnetycznego. Do kontroli stanu rurociągów stosuje się czujniki
wykorzystujące zjawisko GMI. Pojawienie się defektów w strukturze materiału, takich jak
wtrącenia ze stali niskowęglowej czy powierzchniowe pęknięcia, powoduje zaburzenie
jednorodności pola magnetycznego na powierzchni materiału. Czujnik GMI wykrywa różnice
w polu magnetycznym, co pozwala określić położenie defektów w badanym materiale
[13,14].
Literatura
[1] B eac h R.S., B er ko wi t z A.E., Giant magnetic field dependent impedance of amorphous FeCoSiB wire,
Applied Physics Letters, vol. 64 (1994), 3652-3564
[2] P an i na L.V., Mo hr i K., Magneto-Impedance Effect in Amorphous Wires, 1994, Applied Physics Letters,
vol. 65 (1994), 1189-1191
[3] K no b el M., Vazq u ez M., Kr a u s L., Giant magneto-impedance, Chapter 5 of Handbook of Magnetic
Materials, Elsevier Science B.V., 2003, 497-563
167
XXI Sympozjum PTZE, Lubliniec 2011
[4] P iro ta K.R., Kr a u s L., C hi r iac H., K no b el M., Magnetic properties and giant magnetoimpedance in
a CoFeSiB glass-covered microwire, Journal of Magnetism and Magnetic Materials, vol. 221 (2000),
L243–L247
[5] Vázq ue z M., Giant magneto-impedance and applications, European School of Magnetism: New magnetic
materials and their function, 9-18.09.2007, Cluj-Napoca, Romania
[6] T an no us C., G ier a lto ws k i J., Giant magneto-impedance and its applications, arXiv:physics/0208035 v2
(2003), 1-25
[7] Uc hi ya ma T., Mo hr i K., S hi n k ai M., O hs h i ma A., Ho nd a H., Ko a ya s hi T., W ak ab a ya s h i T.,
Position sensing of magnetite gel using MI sensor for brain tumor detection, IEEE Transaction on
Magnetics, vol. 33 (1997), 4266-4268
[8] Ka n no T., Mo hr i K., Ya g i T., Uch i ya ma T., Sh e n L.P., Amorphous wire MI micro sensor using
C-MOS IC multivibrator, IEEE Transaction on Magnetics, vol. 33 (1997), 3358-3360
[9] P an i na L.V., Mo hr i K., Magneto-impedance in multilayer films, Sensors and Actuators A: Physical, vol.
81 (2000), 71-77
[10] Val e nz ue la R., V ázq ue z M., Her na nd o A., A position sensor based on magnetoimpedance, Journal of
Applied Physics, vol. 79 (1996), 6549-6551
[11] T o ts u K., Ha g a Y., E sa s hi M., Three-axis magneto-impedance effect sensor system for detecting
position and orientation of catheter tip, Sensors and Actuators A: Physical, vol. 111 (2004), 304-309
[12] Uc hi ya ma T., Mo hr i K., S hi n k ai M., Oh s h i ma A., Ho nd a H., Kobayashi T., Wak ab a ya s h i T.,
Yo s h id a J . , Position sensing of magnetite gel using MI sensor for brain tumor detection, IEEE
Transaction on Magnetics, vol. 33 (1997) 4266-4268
[13] Go ktep e M., Eg e Y., B a yr i N., Ata la y S., Non-destructive Crack detection using GMI sensor, Physica
Status Solidi (c), vol. 1(2) (2004), 3436-3439
[14] Mac had o F.L.A., Si l va B.L., Mo nt arro yo s E., Magnetoresistance of the random anisotropic
Co70.4Fe4.6Si15B10 alloy, Journal of Applied Physics, vol. 73 (1993), 6387-6389
168
XXI Sympozjum PTZE, Lubliniec 2011
ASSESSMENT OF TORQUES FOR A PERMANENT
MAGNET BRUSHLESS MOTOR USING FEA
Lidija Petkovska1,2, Goga Cvetkovski1
1
Ss. Cyril and Methodius University, Faculty of Electrical Engineering and Information
Technologies, Macedonia
2
International Balkan University, Macedonia
1. Introduction
The demand for high performance permanent magnet motors is continuously increasing in
industrial applications because of their high efficiency and power density. Another advantage,
over comparable motors, is the absence of the excitation winding. However, the machine
inherently has a torque ripple which causes vibrations and noises. This deteriorates the
performance of position control and speed control systems, particularly at lower speed. As a
consequence, it is important to find out accurate methods for calculation and assessment not
only the static electromagnetic toque, but the torque ripple, as well. In the paper analysis of
torques for Permanent Magnet Brushless (PMBL) motor, through numerical calculations of
the magnetic field, are presented. It is started with computations of electromagnetic torque
and cogging torque. The particular emphasis is put on determination and analysis of the
torque pulsations, due to change of the switching angles of the motor power supply and
control device.
2. Problem Definition
There are mainly two contributions to the torque ripple in the PM motors. The first one is the
cogging torque which arises from the interaction of the permanent magnets with the stator
teeth. As a result, the torque is generated by the tendency of the rotor to align with the stator,
at positions where the permeance of the magnetic circuit is maximized. The second
contribution is the torque pulsation caused by the presence of harmonics in the air-gap flux
density distribution of the permanent magnets [1].
It is analysed one possible configuration of PMBL motor: permanent magnets are mounted on
the rotor surface, whilst a three stage winding in wye-connection is placed in the stator teeth.
The general scheme of the motor power supply and control system is presented Fig. 1. The
PMBL motor is supplied by a full bridge inverter, as presented in Fig. 2, with alternate rectangular current waves. There are six transistors, placed in the upper and lower bank, with a
fly-back diode in anti-parallel. Within one full electrical cycle, six different switching modes
in transistor gating sequence occur; thus, at any moment, two transistors, one from each bank,
are "on", supply two stator windings with opposite current waves, while the third one is left
unexcited. The inverter's work is subordinated to the speed and torque control through current
regulation and rotor position. In the full paper will be elaborated in detail control algorithm of
the motor.
169
XXI Sympozjum PTZE, Lubliniec 2011
Fig. 1 Configuration of PMBL motor
Fig. 2 Transistor bridge inverter
3. Method of Analysis
The PM brushless motor analyzed in this paper is a 3-phase, 6-pole, 36-slot machine, with
rated current of 18 A, torque control 0-10 Nm, and speed control 0-4000 rpm. On the rotor
surface of the motor, there are mounted six high energy SmCo5 magnet poles that are
magnetized in the radial direction [2].
The Finite Element Analysis (FEA), using either two-dimensional or three-dimensional field
solver, has been used extensively in determination and assessment of electrical machines
characteristics. The results presented in this paper are computed using the 2D FEM code. As
the first step, the mesh of finite elements is generated over the whole cross section of the
motor; it consists of more than 57,000 nodes and about 115,000 elements. In order to achieve
a very close estimation of the torques, the mesh density in the air gap, where the Maxwell
stress is highest, has been particularly increased.
The numerical calculations start with no-load, i.e. at zero stator current, when the magnetic
field is produced by the permanent magnets only. The next FEM results will show the effects
of load on the magnetic field distribution in the motor. The computations are carried out with
rated current for the motor windings, when are energised as depicted with dotted line in Fig.
2; the rotor displacement is arbitrary selected to be clockwise. In the full manuscript, a
detailed FE analysis of the magnetic field of the studied motor will be given. There will be
calculated and graphically presented the characteristics of the magnetic flux in dependence of
the excitation current and rotor position, magnetic flux density distribution in the air-gap, flux
linkage and induced back EMF in the stator windings, as well as all torques.
4. Computational Results
Knowledge of the static torque is very important for the performance analysis and behaviour
of electric motors. For the torque calculations, various approaches exist. In electromagnetic
theory the torque is computed from the field solution in a number of ways. Recently, it has
been shown that the preferred method for accurately calculating the electromagnetic torque is
by the weighted stress tensor of a volume integral, which is used in this paper; this greatly
simplifies the computation of torques, as compared to evaluating torques via the stress tensor
line integral or differentiation of co-energy. However, the results tend to be more accurate
with finer meshing around the region upon which the torque is to be computed. The
characteristics Tem=f() for two values of the armature current, 18 A and 9 A, are shown in
Fig. 3, while Tem=f(I) for four values of the rotor position are presented in Fig. 4.
170
XXI Sympozjum PTZE, Lubliniec 2011
Cogging torque of PM motors is always a challenging matter for analysis. The cogging
(unexcited) torque of the PMBL motor, when the stator windings are not energised, is obtained
from the FEM computational results, too. The characteristic Tcog=f() is presented in Fig. 5.
10
I=In=18 A
I=In/2=9 A
8
4
0
0
15
30
45
60
75
90
105
120
-4
-8
Electromagnetic torque (Nm)
Electromagnetic torque (Nm)
12
Rotor
Rotor
Rotor
Rotor
8
angle
angle
angle
angle
10 deg.
15 deg.
20 deg.
30 deg.
6
4
2
0
-12
0
3
6
9
12
15
18
Armature current (A)
Rotor angle (deg. mech.)
0.9
Cogging torque (Nm)
0.6
0.3
0.0
0
5
10
15
20
-0.3
-0.6
-0.9
Rotor displacement (deg. mech.)
Fig. 3 Characteristics Tem=f(), I=cons. Fig. 4 Characteristics Tem=f(I),=cons. Fig. 5 Cogging torque profile
The particular interest in investigation of the PMBL motor is certainly a prediction and an
assessment of torque pulsations. They result from the fact that 6 times in a period (1200
mech.), changes in transistor gating occur. Introducing in the simulations the algorithms of the
control device, different graphs are derived and analysed. In Fig. 6 are presented charts for 3
typical switching angles, at rated current and leading of 200 mech. In the paper, there will be
presented full torque ripple analysis of the PMBL motor.
10
10
8
8
Torque (Nm)
12
Torque (Nm)
12
6
4
6
4
Control: 40-20 deg.
Control: 35-15 deg.
Actual profile
2
2
Expected profile
0
0
0
20
40
60
80
Rotor displacement (deg. mech.)
100
0
120
20
40
60
80
100
120
Rotor displacement (deg. mech.)
12
Torque (Nm)
10
8
6
4
Control: 45-25 deg.
2
0
0
20
40
60
80
Rotor displacement (deg. mech.)
100
120
Fig. 6 Torque pulsations at rated current and switching angles: 40 0 – 200 ; 350 – 150 ; 450 – 250
171
XXI Sympozjum PTZE, Lubliniec 2011
References
[1] D. M. Ionel, M. Popescu, M. I. Mc Gilp, T. J. E. Miller, S. J. Dellinger, Assessment of Torque Components
in Brushless Permanent-Magnet Machines Through Numerical Analysis of the Electromagnetic Field,
IEEE Trans. on Industry Applications, Vol. 41, No. 5, September/October 2005, pp. 1149-1158.
[2] L. Petkovska, G. Cvetkovski, FEM Based Simulation of Permanent Magnet Synchronous Motor
Performance Characteristics, Proceedings of CES/IEEE 5th International Power Electronics and Motion
Control Conference IPEMC'06, Vol. 1/3, pp. 254-258, Shanghai, China, 2006.
172
XXI Sympozjum PTZE, Lubliniec 2011
REMOTE TRANSMISSION
OF CARDIAC IMPLANT PATIENTS DATA
Anna Plawiak-Mowna1, Andrzej Krawczyk2
1
University of Zielona Gora, Faculty of Electrical Engineering, Computer Science
and Telecommunications
2
Czestochowa University of Technology, Faculty of Electrical Engineering
Abstract – Telemedicine can be described as the use of electronic communications and information technologies to provide
or support clinical care at a distance. Authors focused on telemonitoring of cardiac implant patients and the problem
telemetry interference and problem of unauthorized access to clinical/patients data.
Keywords: Cardiac implant patients, telemedicine, remote transmission
Introduction
Telemedicine is a generic term which is used to define various aspects of health care at a
distance. Telemedicine is currently used in patient care, professional and patient education,
research and public-health applications. The key aspect of telemedicine is the use of
electronic signals to transfer information from one site to another. Wireless communications
can link the devices together and aid in the diagnosis and treatment of patients.
Remote Transmission of Cardiac Implant Patient Data
The modern model of communication for electronic devices include the exchange of data via
modems, cellular phones or wireless networks. The electronic medical devices (eg cardiac
pacemakers) are also using the latest development in technology for cardiac implants
communication and data exchange. The wireless implantable devices allow patients with
implantable medical devices, such as cardiac pacemakers, defibrillators, and blood-glucose
monitors to have their devices checked by medical professionals without time consuming
physical connections to the body and in some instances without the need of a trip to a
hospital. With the use of cell phones or modems can be transmitted the data, events or ECG
signal stored in the implants. The transmitted data can be viewed in the Internet (or receiving
station).
Remote monitor for cardiac implants patients is recommended (minimum) for every 3-12
months after implantation (pacemaker), for every 3-6 months (ICD), for every 1-3 months at
signs of battery depletion, [1,2].
Transferring data covers several areas of safety and quality of the signal. The paper will
present two of them: the possibility of unauthorized access to clinical data stored in the
implant [3] and the disruption of radio telemetry [4].
Experiments carried out by Halperin and his team [3] have shown that data privacy is at risk
in case of use commercial programmer, software radio eavesdropper, software radio
programmer (1. possibility of determine: (a) if patient has implanted a ICD, (b) what kind of
ICD patient has implanted, (c) ID of ICD, (d) personal data (name etc.); 2. obtain: (a) private
telemetry data from ICD, (b) private information about patient history).
173
XXI Sympozjum PTZE, Lubliniec 2011
Tests carried out by researchers from the USA [4] show that iPods can produce interference
with establishment and maintenance of a telemetry link and can cause telemetry interference
with transmission of real time data.
Conclusion
As a conclusion, possibility of unauthorized access to cardiac implant patient data and telemetry
interferences will be reported.
References
[1] BL. Wilkoff, A. Auricchio, J. Brugada et al.: HRS/EHRA expert consensus on monitoring of
mardiovascular implantable electronic devices (CIEDs): description of techniques, indications, personnel,
frequency and ethical considerations, Heart Rhythm, Vol. 5(6), pp. 907-925, Jun 2008
[2] Umashankar Lakshmanadoss, Abrar Shah and James P Daubert (2011). Telemonitoring of the Pacemakers,
Modern Pacemakers - Present and Future, Mithilesh Kumar Das (Ed.), ISBN: 978-953-307-214-2, InTech,
Available from: http://www.intechopen.com/articles/show/title/telemonitoring-of-the-pacemakers
[3] D. Halperin, TS. Heydt-Benjamin, B. Ransford et al.: Pacemakers and implantable cardiac defibrillators:
software radio attacks and zero–power defenses, 2008 IEEE Symposium on Security and Privacy,
http://ieeexplore.ieee.org/
[4] AJ. Shah, JD. Brunett, JP. Thaker et a.: Characteristic of telemetry interference with pacemakers caused by
digital media players, Pacing and Clinical Electrophysiology, Vol. 33(6), pp.712-720, Jun 2010
[5] C. Pergins, G. Klein, E. Toft et al.: The RIONI study rationale and design: validation of the first stored
electrocardiograms transmitted via home monitoring in patients with implantable defibrillators, Europace,
Vol. 8, pp. 288-292, Apr 2006
174
XXI Sympozjum PTZE, Lubliniec 2011
ANALYSIS AND INVESTGATIONS INTO SENSORLESS
CONTROL SYSTEM BASED ON DOUBLY FED MACHINE
WORKING AS A GENERATOR
Andrzej Popenda
Częstochowa University of Technology, Department of Electrical Engineering
1. Introduction
Nowadays, slip-ring machines are mainly applied as generators in unconventional power
systems converting wind or water energy. A slip-ring machine works as a doubly fed machine
(DFM) with stator winding directly connected to the grid and rotor winding connected to the
grid via bidirectional frequency converter and isolating transformer. The frequency of induced
voltage is not depended directly on the angular velocity of DFM in contrast to synchronous
machines being basis for majority conventional power systems. This feature considerably
facilitates a choice of a drive for generator.
A generator operation of DFM results in necessity of transformation of command signals to
the rotor-oriented coordinate system where the rotor current is generated. A rotor position
angle required as an argument of the abovementioned transformation may be measured by a
position sensor. A new sensorless control system for DFM allowing for adjustment of active
and reactive power was developed by the author. The aforementioned system allows
achieving dynamic properties similar to the systems equipped with position sensor. A
mathematical analysis and experimental results presented in the paper confirm this thesis.
2. A structure of the system
A phase locked loop (PLL) applied in the proposed structure allows removing the position
sensor from the DFM-based control system. Applications of PLL instead of position sensor
were proposed in the former literature sources. However, authors of these proposals copied
directly the PLL known from radio engineering. This solution did not give satisfactory results
in DFM-based control systems.
Fig. 1. The DFM-based control system with the application of a PLL in order to estimate a rotor position angle
In the proposed structure (Fig. 1) a phase locked loop replacing a position sensor controlls the
phase angle between stator voltage and estimated rotor current. The PLL consists of
proportional-plus-integral (PI) controller and integrator. In both cases, i.e. in the proposed
175
XXI Sympozjum PTZE, Lubliniec 2011
system and in the sensor-based system, the rotor position angle t is the output quantity. This
feature distinguishes the abovemantioned systems from the system known from literature
sources where PLL is used in order to estimate the phase angle i of rotor current.
3. Mathematical analysis of the system
An influence of phase locked loop on operation of the system is analysed mathematically
whereas an influence of main controllers adjusting active and reactive power is omitted
because they are not necessary for stable operation of the system. Results of analysis are
presented in the full paper.
4. Experimental results
A slip-ring machine driven by separately excited dc motor was used in experimental
investigations. The inverter controls DFM according to the block diagram (Fig. 1) on the basis
of microprocessor system working in real time.
Fig. 2. Time-dependencies measured in experimental system: (a) example of synchronization, (b)
transient responses of the system on a step change of active power reference, where p, q are active
power and reactive power of DFM, cos t , sin t are functions of rotor position angle estimated in
control system, t is angular velocity of rotor related to the voltage-oriented coordinate system
Examples of time-dependencies illustrating synchronization process of investigated system
since the inverter is started-up as well as transient responses of the system on a step change of
active power reference are given in Fig. 2. The system is being in synchronism before one
period of grid voltage is over i.e. a synchronization time is less than twenty milliseconds.
5. Conclusion
The sensorless control system for DFM-based generator developed by author allows for
decoupled adjustment of active and reactive power like the system equipped with position
sensor. Results of analysis and experimental investigations presented in the paper confirm
good properties of the system.
176
XXI Sympozjum PTZE, Lubliniec 2011
A GENERAL MATHEMATICAL MODEL OF DRIVE SYSTEM
FOR POLYMERIZATION REACTOR BASED
ON ASYNCHRONOUS INDUCTION MOTOR
WITH PIPE BODY
Andrzej Rusek
Politechnika Częstochowska, Wydział Elektryczny
1. Introduction
Polymerization reactors play the most significant role in the production line of polyethylene.
The drive system for mixer of polymerization process works in two chambers of the reactor.
Operating conditions of the drive system are extraordinary due to the necessity of keeping a
constant temperature in reactor chamber under
ethylene atmosphere and working pressure up to
2800105 Pa. The driving motor has non-standard
1
M
dimensions and construction due to the vertical fixing
2
M
in a socket in the upper chamber of reactor. A power
3
grid or a motor-generator set or a frequency converter
M
4
can by a voltage source for the motor. Supply systems
5
are often damaged as a result of extreme working
conditions, including feeding the motor via specially
6
designed pressure electrodes providing trouble-free
7
operation for a difference in pressure up to 2800 atm.
A specially designed motor with pipe body has been
8
made as a result of the carried out designing efforts and
M
alternative developments of prototypes. The motor
M
includes a large-size slide bearing made of sintered
1 - wirnik silnika
2 - strefa zlepiania
carbides. The motor has the following rated
3 - wał wirnik - łożysko cierne
M
4 - łożysko cierne
parameters: Рn = 55 kW, U1n = 380V, fn = 50 Hz, Mn =
5 - wał łożysko cierne - sprzęgło
6 - sprzęgło
7 - wał mieszadła
374 Nm, Mmax = 842,85 Nm, nn = 1420 rpm, pb = 2, I1n
M
8 - mieszadło
= 108 А, J = 1,02 kg·m2, G = 385 kg.
M
1
s
zl
2
t
3
4
5
o1
6
o2
7
o3
8
o4
9
o5
10
2. Kinematic diagram of a drive system
Fig. 1. Kinematic diagram of the
exemplary drive system for polymerization reactor based on asynchronous
induction motor with pipe body, where: 1
is rotor of motor, 2 is agglutination area,
3 is shaft between rotor and frictional
bearing, 4 is frictional bearing, 5 is shaft
between frictional bearing and clutch, 6
is clutch, 7 is shaft of mixer, 8 is mixer
A kinematic diagram of the exemplary drive system
for polymerization reactor based on asynchronous
induction motor with pipe body is depicted in Fig. 1
3. Mathematical model
The drive system for polymerization reactor based on
induction motor with pipe body is a simply climatic
system but phenomena occurring during operation of the
system do not take place in the standard drive systems.
177
XXI Sympozjum PTZE, Lubliniec 2011
The following examples of phenomena occur in the running drive system for polymerization
reactor. These phenomena step over operation of the standard drive systems and have direct
influence on operation of drive system as its load:
agglutination of the rotor and stator of asynchronous motor at driving side of the motor
as a result of poly-merization in this operating area of reactor chamber
sliding friction in the large-size slide bearing made of sintered carbides and cooled by
ethylene stream via guide rings of a cooling set
filling the construction of mixer with polyethylene in mixing chamber of
polymerization reactor
sliding friction of mixer filled with polyethylene in the space of charge of
polymerization reactor mixing chamber by polyethylene
mixing of ethylene stream by mixer in lower chamber of polymerization reactor in part
unfilled with polyethylene or for operation of drive system with uncharged mixer.
Considering the assumed designation of rotation angles (Fig. 1) a column matrix for
respective angles related to inertial moments was determined (1).
'
q т 1' 2' 3' 4' 5' 6' 7' 8' 9' 10
(1)
The rigid sections containing reduction of rotation do not occur in the computational
kinematic diagram (Fig. 1). Therefore, the inertial moments may by introduced directly to
diagonal matrix determining inertial moments related to the angles of rotation in column
matrix given by (1). The diagonal matrix determining inertial moments related to the
independent angles of rotation is given by (2).
*
D diag J1* J 2* J 3* J 4* J 5* J 6* J 7* J 8* J 9* J10
(2)
A general mathematical model of the drive system for polymerization reactor based on
asynchronous induction motor wit pipe body is expressed by the following system of
equations (3)
J 2*2' b1 1' 2' b2 2' 3' c1 1' 2' c2 2' 3' M zlw
J 3*3' b2 2' 3' b3 3' 4' c2 2' 3' c3 3' 4' M tw
J 4*4' b3 3' 4' b4 4' 5' c3 3' 4' c4 4' 5' 0
J 5*5' b4 4' 5' b5 5' 6' c4 4' 5' c5 5' 6' 0
J 6*6' b5 5' 6' b6 6' 7' c5 5' 6' c6 6' 7' M 01
J 7*7' b6 6' 7' b7 7' 8' c6 6' 7' c7 7' 8' M 02
J 8*8' b7 7' 8' b8 8' 9' c7 7' 8' c8 8' 9' M 03
'
c8 8' 9' c9 9' 10' M 04
J 9*9' b8 8' 9' b9 9' 10
* '
'
c9 9' 10' M 05
J10
10 b9 9' 10
J1*1' b1 1' 2' c1 1' 2' M s
178
(3)
XXI Sympozjum PTZE, Lubliniec 2011
Conclusions
The system of differential equations of second type given by (3) and being a general
mathematical model of drive system for polymerization reactor based on asynchronous
induction motor with pipe body allows simulating the dynamic courses of variables describing
the drive system. The model takes into account specific phenomena that do not occur in the
standard drive systems. These phenomena result in additional torques occurring in the running
polymerization reactor i.e.:
– a load torque caused by agglutination of rotor and stator of motor; the torque is
variable in time and depends on agglutination areas and respective polymerization
phases
– a sliding friction torque in large-size slide bearing made of sintered carbides; the
torque is variable in time of operation due to the changes of mixer weight resulting
from filling the mixer with polyethylene; it depends on both: conditions of
polymerization process course and polymerization phases for determined parameters
of the process
– an inertial moment of mixer resulting from filling the mixer construction with
polyethylene; the moment is variable and depends on a level of charge of mixer by
polyethylene in lower reactor chamber
– a sliding friction torque of mixer filled by polyethylene rubbing with polyethylene in
the space of charge of lower reactor chamber by polyethylene; the torque is variable in
time and depends on variation of charging level in lower chamber of polymerization
reactor
– a fan torque of mixer related to mixing of ethylene; the torque is variable in time and
depends on the length of mixer part in lower chamber of polymerization reactor
unfilled by polyethylene.
179
XXI Sympozjum PTZE, Lubliniec 2011
DETERMINATION OF PARAMETERS TO DEFINE
A RESULTANT INERTIAL MOMENT OF THE DRIVE
SYSTEM FOR POLYMERIZATION REACTOR BASED
ON ASYNCHRONOUS INDUCTION MOTOR
WITH A PIPE BODY
Andrzej Rusek
Politechnika Częstochowska, Wydział Elektryczny
1. Introduction
The following examples of phenomena occur in the running drive system for polymerization
reactor. These phenomena step over operation of the standard drive systems and have direct
influence on operation of drive system as its load:
agglutination of the rotor and stator of asynchronous motor at driving side of the motor
as a result of polymerization in this operating area of polymerization reactor chamber
sliding friction in the large-size slide bearing made of sintered carbides and cooled by
ethylene stream via guide rings of a cooling set
filling the construction of mixer with polyethylene in mixing chamber of
polymerization reactor
sliding friction of mixer filled with polyethylene in the space of charge of
polymerization reactor mixing chamber by polyethylene
mixing of ethylene stream by mixer in lower chamber of polymerization reactor in part
unfilled with polyethylene or for operation of drive system with uncharged mixer.
2. A computational kinematic diagram of the drive system
Ms
Js
1
Mzl
Mt
J1
5
2
Mo1
J2
J3
3
J4
J5
J6
4
Mo2
J8
J7
Mo3
J10
J9
J12
J11
Mo5
Mo4
J14
J13
J15
Fig. 1. A simplified kinematic diagram of the drive system for polymerization reactor, where: 1 is motor, 2 is
large-size slide bearing set, 3 is clutch of mixer, 4 is mixer, 5 is space of appearance of the agglutination torque
concerning stator and rotor
180
XXI Sympozjum PTZE, Lubliniec 2011
J1' 1'
Ms
J 3' 3'
Mt
J 2' 2'
Mzl
c1 , b1
c2 , b2
J 4' 4'
c3 , b3
J 5' 5'
c4 , b4
J 6' 6'
Mo1
c5 , b5
J 8' 8'
Mo3
J 7' 7'
Mo2
c6 , b6
J 9' 9'
Mo4
c8 , b8
c7 , b7
'
J10
10'
Mo5
c9 , b9
Fig. 2. The computational kinematic diagram of the drive system for polymerization reactor based on induction
motor with a pipe body
A simplified kinematic diagram of the drive system for polymerization reactor based on
asynchronous induction motor with pipe body is depicted in Fig. 1. Considering the simplified
kinematic diagram of an exemplary drive system for polymerization reactor based on
asynchronous induction motor with a pipe body (Fig. 1) the computational kinematic diagram
of drive system for polymerization reactor was derived (Fig. 2).
3. Determination of parameters
Inertial moments of a drive system are fundamental parameters of mathematical model that
allows determining dynamic courses of variables describing the system. The inertial moments
of the drive system for polymerization reactor are complicated because of polymerization
process which causes a time inconstancy of these moments during polymerization process.
This is a result of filling the respective mixer parts with the polyethylene. The inertial moment
of mixer differ significantly from the inertial moment of filling of mixer what depends on
both cross-sectional areas determining the inertial moments and different mass densities of
mixer and the filling of mixer.
The inertial moment of mixer and notches along the mixer axis, according to the denotation
assumed in Fig. 2, is given as follows:
k m' 1 m'' 1 m'''1 ,
J k* J k ,k' ,
k ' m'' 2 m'''2
(1)
where: J k* is the resultant moment of mixer inertia, m' 1 ,m' ' 1 ,m'' '1 are components of inertial
moment for mass density 1, m' ' 2 ,m' ' '2 are components of inertial moment for mass density 2.
The shortened formulas on inertial moments of mixer for various simplifications of crosssectional area of mixer are given by (2).
J k*
lm '
ck1 1lm ck 2 lm 2 ,
lm
'
J k*
ck1 1lm ck 2
'
'
lm '
lm 1 lm 2
lm
'
(2)
where: ck1 , ck 2 are constructional constants resulting from mechanical parameters of the
drive system for case P1, ck 1 , ck 2 are constructional constants resulting from mechanical
parameters of the drive system for case P2.
181
XXI Sympozjum PTZE, Lubliniec 2011
4. Conclusions
The dependencies determined by system of equations (3) have been introduced in a shortened
version i.e. without constructional parameters of mixer. The constructional details will be
presented in the extended version of the paper. The inertial moments determined analytically
allow describing a variation of inertial moment of the drive system during polymerization
process. The mathematical model of the drive system for polymerization reactor together with
description of a mixer inertial moment variability may by applied in order to analyze the
dynamic states of the drive system for polymerization reactor. Furthermore, it may also be
applied in order to analyze the dynamic states of some drive systems, where there are variable
in time inertial moments caused by other technological phenomena differing from the charge
of the lower polymerization reactor chamber by polyethylene.
182
XXI Sympozjum PTZE, Lubliniec 2011
ZASTOSOWANIE TELEMEDYCYNY
Remigiusz Rydz
Techniczne Zakłady Naukowe w Częstochowie
Telemedycyna w najbardziej potocznym znaczeniu to medycyna na odległość, czyli
świadczenie usług medycznych z dala od pacjenta. Polega na rozdzieleniu miejsca, w którym
przebywa pacjent i w którym przebywa świadcząca te usługi osoba, np. lekarz, rehabilitant,
który prowadzi sesję rehabilitacyjną z pacjentem lub pielęgniarka, która zdalnie odbiera
wyniki badań. Telemedycyna jest najnowszą, bardzo dynamicznie rozwijającą się formą
medycyny i opieki zdrowotnej, łączącą w sobie elementy telekomunikacji, informatyki oraz
medycyny.
Korzystając z najnowocześniejszej technologii multimedialnej, wideokomunikacji oraz
Internetu, telemedycyna umożliwia zespołom specjalistów przełamanie barier czasowych,
przestrzennych, postawienie szybkiej diagnozy i zapewnienie opieki medycznej poprzez
podróż informacji , zamiast podróży pacjentów lub lekarzy.
Telemedycyna przeznaczona jest głównie dla pacjentów, którzy z różnych powodów nie są w
stanie fizycznie przybyć na tradycyjną wizytę i badanie do lekarza, szpitala czy ośrodka
zdrowia. Biorąc pod uwagę to, że większość populacji żyje poza granicami miast, w których
dostęp do opieki zdrowotnej jest trudniejszy, telemedycyna stanie się w najbliższym czasie
jednym z najważniejszych instrumentów ochrony zdrowia oraz rewelacyjnym rozwiązaniem
dla chorych.
Telemedycyna jest dziedziną bardzo dynamicznie rozwijającą się w wielu kierunkach.
Nieustanny rozwój technologiczny wprowadza coraz to nowsze możliwości i standardy
w zastosowaniach medycznych. Już niedługo jedyną rzeczą ograniczającą rozwój
telemedycyny będzie jedynie inwencja twórcza lekarzy. Obecnie telemedycyna umożliwia
między innymi przeprowadzanie operacji na odległość, interaktywne wideokonferencje
pomiędzy lekarzami specjalistami, lekarzem i pacjentem, przesyłanie na odległość obrazów
statycznych i dynamicznych, zdjęć rentgenowskich, echogramów, EKG, USG, tomografii
komputerowej itp. Ostatnio jedną z najszybciej rozwijających się metod przesyłania
informacji w świecie jest wideokomunikacja. Dzięki nowoczesnej technologii,
wykorzystującej szybkie procesory i algorytmy do cyfrowego przetwarzania i kompresji
sygnałów,
możliwe
jest
przesyłanie
obrazów
o
wysokiej
rozdzielczości,
a także interaktywną transmisję audiowizualną z wyjątkową dokładnością i w czasie
rzeczywistym.
Telemedycyna oznacza usługi medyczne w zakresie:
Teledermatologii,
Telepatologii,
Telekardiologii,
Teleneurologii,
Teleopieki domowej,
Telechirurgii i robotyki,
Telerehabilitacji.
183
XXI Sympozjum PTZE, Lubliniec 2011
Telemedycyna ułatwia dostęp do specjalistycznej opieki medycznej, pomaga w usługach
specjalistycznych oraz przy konsultacjach, dzięki niech lekarze mogą asystować przy
trudnych i skomplikowanych zabiegach i operacjach. Telemedycyna to również ułatwiony
dostęp do pomocy medycznej i zmniejszonej hospitalizacji oraz możliwość szkolenia
personelu medycznego za pomocą technologii informatycznych.
184
XXI Sympozjum PTZE, Lubliniec 2011
SOLVING INVERSE PROBLEM
IN EIT BY LEVENBERG–MARQUARDT LEVEL SET
METHOD
Tomasz Rymarczyk, Stefan F. Filipowicz1,2
1
Warsaw University of Technology, Institute of the Theory of Electrical Engineering,
Measurement and Information Systems
2
Electrotechnical Institute, Warszawa
ABSTRACT: This paper presents the Levenberg–Marquardt level set method to solve the inverse problem in the
electrical impedance tomography (EIT). The conductivity values in different regions are determined by the finite
element method. The representation of the shape of the boundary and its evolution during an iterative
reconstruction process is achieved by the Levenberg–Marquardt level set method.
Introduction
In this paper was proposed a method
Input
START
data
based on the level set idea and the
Levenberg–Marquardt algorithm to
solve the inverse problem in the electrical impedance
tomography [1,3]. The representation of the shape of the
boundary and its evolution during an iterative reconstruction
process is achieved by the level set method [4,5,6,7]. The
conductivity values in different regions are determined by
the finite element method [2]. Numerical algorithm is a
combination of the Levenberg–Marquardt algorithm, the
level set method and the finite element method for
computing the velocity. As usual for gradient-type methods,
the convergence speed is quite slow for such approaches, in
particular if the topological structure of the shape changes
during the iteration. The fast alternative to gradient-type
methods is the Levenberg–Marquardt algorithm (LM),
which provides a numerical solution to the problem of
minimizing a function. The aim of this paper is using the
Levenberg-Marquardt and the level set method (LMLSM)
to solve the inverse problem in EIT. The LMLSM consists
in minimizing a quadratic functional in each time step to
obtain this normal velocity and successively performing a
time step for the level set function.
Initialization –
zero level set
function
Determination
- conductivity
Forward problem
(finite element method)
Adjoint
equation
Velocity - calculation
Update function ϕ
Conductivity
- calculation
Reinitialization
NO
Condition
INVERSE PROBLEM
YES
STOP
Results
Fig. 1. The iterative algorithm
185
XXI Sympozjum PTZE, Lubliniec 2011
Electrical impedance tomography
The image reconstruction in Electrical Impedance Tomography is a highly ill-posed inverse
problem [2]. The following functional is minimized:
p
F 0.5 ( Φ V0 )T ( Φ V0 )
j 1
(1)
where p is the number of the projection angles.
The derivative of F with respect to γ is given by
p
F
j j
j 1
(2)
where: – the electric potential, – the adjoint variable.
The iterative algorithm was shown in figure 1. The picture 2 presents the images of
reconstruction by using the level set methods and the finite element method.
a)
b)
c)
d)
Fig.2. Images reconstruction: a) c) the original objects and the zero level set function, b) d) the process and
the image reconstruction
References
[1] Burger M.: Levenberg-Marquardt level set methods for inverse obstacle problems, Inverse Problem 20
(2004) 259-282.
[2] Filipowicz S.F., Rymarczyk T.: Tomografia Impedancyjna, pomiary, konstrukcje i metody tworzenia
obrazu. BelStudio, Warsaw 2003.
[3] Filipowicz S.F., Rymarczyk T., Sikora: J. Level Set Method for inverse problem solution in electrical
impedance tomography. XII ICEBI & V EIT Conference. Gdańsk 2004.
186
XXI Sympozjum PTZE, Lubliniec 2011
[4] Osher S., Fedkiw R.: Level Set Methods and Dynamic Implicit Surfaces. Springer, New York 2003.
[5] Osher S., Sethian J.A.: Fronts Propagating with Curvature Dependent Speed: Algorithms Based on
Hamilton-Jacobi Formulations. J. Comput. Phys. 79, 12-49, 1988.
[6] Osher, S., Fedkiw, R.: Level Set Methods: An Overview and Some Recent Results. J. Comput. Phys. 169,
463-502, 2001.
[7] Sethian J.A.: Level Set Methods and Fast Marching Methods. Cambridge Univeristy Press 1999.
187
XXI Sympozjum PTZE, Lubliniec 2011
NOWOCZESNE TECHNIKI PROJEKTOWANIA
I WYTWARZANIA MASZYN ELEKTRYCZNYCH
I TRANSFORMATORÓW
Stefan Sieradzki, Damian Kardas
TurboCare Poland S.A.
Referat ukazuje aspekty procesu projektowania i wytwarzania maszyn elektrycznych i transformatorów,
odzwierciedlające między innymi współczesne wymagania eksploatacyjne i postęp w produkcji nowoczesnych
materiałów konstrukcyjnych. Te nowe uwarunkowania i konkurencyjność produktu na rynku, kształtują jego
proces projektowania i wytwarzania, którego cechą znamienną jest daleko idąca optymalizacja. W referacie
przedstawiono nowoczesne techniki projektowania i wytwarzania maszyn elektrycznych i transformatorów, na
podstawie wybranych projektów realizowanych w firmie TurboCare Poland S.A.
1. Wstęp
DANE WEJŚCIOWE
PROJEKTOWANIE
DOKUMENTACJA
TECHNICZNA
CAD / CAM
Pomiary i badania
Park Maszynowy
Technologie
Materiały
Dobór materiałów
CAD
Symulacje, obliczenia (CAE)
Analiza zjawisk, badania modelowe
Pomiary wstępne, reverse engineering
Normy techniczne
Ochrona środowiska
BHP
Przepisy prawne, standardy techniczne
Wymagania klienta
Parametry znamionowe obiektu
Wymagania eksploatacyjne
Wymagania klienta odzwierciedlające współczesne warunki eksploatacji maszyn elektrycznych i
transformatorów oraz konkurencyjność ceny, wymuszają daleko idącą optymalizację konstrukcji i
procesu ich wytwarzania. Kluczowym jest więc doświadczenie kadry inżynierskiej wsparte
badaniami naukowymi, wykorzystanie właściwości nowoczesnych materiałów konstrukcyjnych
oraz zastosowanie efektywnych narzędzi obliczeniowych i projektowych. Drugą, równie ważną
częścią jest optymalizacja procesu wytwarzania wyrobu. Wymaga to zastosowania wysoko
specjalistycznej technologii i parku maszynowego. Uogólniony schemat procesu projektowania i
wytwarzania produktu przedstawia rys.1.
PRODUKCJA
PRODUKT
Rys.1 Schemat procesu projektowania i wytwarzania produktu.
2. Dane wejściowe
2.1. Wymagania klienta
Niezależnie od typu produktu, wymagania klienta można w skrócie wymienić w kilku
najważniejszych punktach:
wysoka niezawodność i trwałość produktu,
wysoka sprawność,
energooszczędność,
188
XXI Sympozjum PTZE, Lubliniec 2011
konkurencyjna cena.
W procesie projektowania i wytwarzania maszyn elektrycznych i transformatorów
wymaganym jest uwzględnienie wszystkich w/w wymagań klienta z określonymi,
szczególnymi warunkami eksploatacyjnymi wśród których można m.in. wymienić:
rodzaj pracy,
charakter i specyfika obciążenia,
przeciążalność.
Każdy z wymienionych warunków pracy maszyny elektrycznej, transformatora wpływa na
trwałość tego wyrobu i kumuluje skutki prowadzące po pewnym czasie do degradacji
konstrukcji. Istotnym jest zatem powiązanie poszczególnych stanów pracy urządzeń oraz
występujących uszkodzeń i uwzględnienie ich w procesie projektowania wyrobu.
2.2. Przepisy prawne, normy i standardy techniczne
Każdy proces, zarówno na etapie projektowania jak i wytwarzania jest umocowany w ramach
przepisów prawnych (m.in. dotyczących BHP i Ochrony Środowiska) oraz standardów
technicznych (m.in. normy techniczne, przepisy UDT). Spełnienie wszystkich wymienionych
uwarunkowań, ma bezpośredni wpływ na zastosowane rozwiązania konstrukcyjne.
3. Projektowanie
3.1. Pomiary wstępne, ”reverse engineering”
Projektowanie produktu może obejmować modernizację istniejącej maszyny elektrycznej
i transformatora (zmiana parametrów znamionowych) lub wytworzenie nowego wyrobu.
W przypadku modernizacji na wstępie procesu projektowania, wykonywana jest
inwentaryzacja, pomiary odtworzeniowe oraz pomiary środowiska pracy. Jedną z najbardziej
zaawansowanych form pomiarów odtworzeniowych jest ‖reverse engineering‖, pozwalający
odtworzyć w środowisku trójwymiarowym rzeczywistą geometrię mierzonych przedmiotów.
Pomiary wykonywane są za pomocą współrzędnościowych maszyn pomiarowych i skanerów
laserowych (rys. 2), a wyniki przenoszone są bezpośrednio do środowiska CAD w postaci modeli
3D, stanowiących bazę odniesienia do projektowanych nowych i zmodernizowanych wyrobów.
a)
b)
Rys. 2. Pomiary współrzędnościowym ramieniem pomiarowym (a) oraz głowicą skanującą (b)
3.2. Analiza zjawisk, badania modelowe
W maszynach elektrycznych i transformatorach najczęściej dokonuje się analizy
następujących zjawisk:
elektromagnetycznych,
cieplnych i wentylacyjnych,
obciążeń elektrycznych i mechanicznych,
drgań, hałasu.
189
XXI Sympozjum PTZE, Lubliniec 2011
Wszystkie z wymienionych zjawisk są ze sobą ściśle powiązane i mają decydujący wpływ na
prawidłową pracę maszyn elektrycznych i transformatorów. Część z nich można
zidentyfikować i opisać wykonując badania i pomiary na rzeczywistym obiekcie, np.: badania
cieplne, pomiary drgań, hałasu.
Przykładem są przedstawione termogramy (rys.3 i 4) rozkładu temperatury na powierzchni
korpusu generatora, które pozwoliły na weryfikację przeprowadzonej modernizacji układu
wentylacyjnego. Celem modernizacji była eliminacji obszarów o podwyższonej temperaturze
w strefie rdzenia i uzwojeń.
a)
b)
Rys. 4. Termogram stojana generatora 55MW przed (a) i po modernizacji (b)
Natomiast inne zjawiska, ze względu na specyfikę pracy maszyn elektrycznych i
transformatorów, po wykonaniu obliczeń projektowych dla nowych rozwiązań
konstrukcyjnych, wymagają wykonania badań modelowych.
a)
b)
Rys. 5. Model prototypu (w skali 1: 2) wentylatora na stanowisku prób (a) oraz prototypowy wentylator
zamontowany na wirniku generatora 320MW (b) [1]
Przykładowo, w trakcie badań modeli prototypów wentylatora (rys. 5), zostały
zweryfikowane obliczone charakterystyki przepływowe (rys. 6) dla zmiennej geometrii
łopatek, liczby łopatek oraz kąta ich ustawienia. Celem badań było zwiększenie wydajności
nowego typu wentylatora przy jednoczesnej poprawie stabilności jego pracy.
190
XXI Sympozjum PTZE, Lubliniec 2011
S p ię trz e n ie c a łk o w ite P [P a ]
2400
2200
2000
1800
1600
1400
1200
1000
W e nt.-o ryg in aln y
= 4 5 o (z= 2 9 )
800
600
400
200
0
W e ntyla to r B
= 3 6 ,5 o (z= 3 6 )
K rzyw a o p oró w
4
8
12
W e ntyla to r A
= 2 5 ,5 o (z= 2 9 )
16
20
24
28
32
= 1 ,2 [k g /m 3 ]
36
40
44
48
52
56
W y d a jn o ś ć V [m 3 /s ]
Rys. 6. Wyznaczone punkty pracy nowych wentylatorów nastawnych do generatora TWW-230
i wentylatora oryginalnego [1]
3.3. Symulacje komputerowe, obliczenia (CAE)
Wykorzystanie współczesnych technik komputerowych dla modelowania zjawisk
występujących w maszynach elektrycznych, pozwala w znacznym stopniu ograniczyć liczbę
wykonywanych badań i testów. Jednocześnie w oparciu o zebrane dane wciąż poszukuje się
coraz doskonalszych modeli matematycznych, pozwalających na symulację działania maszyn
oraz poszczególnych ich komponentów (rys. 7).
Rys. 7. Geometria 3D modelu obliczeniowego części czołowej uzwojenia stojana oraz wirnika generatora
200MW [8]
Jedną z podstawowych grup obliczeń numerycznych maszyn elektrycznych i transformatorów
stanowią obliczenia elektromagnetyczne. Pozwalają one na określenie m.in. rozkładu i
natężenia linii pól elektromagnetycznych oraz modułu indukcji w elementach
konstrukcyjnych (rys. 8).
191
XXI Sympozjum PTZE, Lubliniec 2011
a)
b)
Rys. 8. Wyniki obliczeń elektromagnetycznych stojana generatora 560MW – rozkład linii ekwipotencjalnych (a) i
modułu indukcji (b) [2]
W oparciu o rozkład modułu indukcji (Rys. 8b) określony został rozkład strat w obszarze
połączeń czołowych uzwojeń, skrajnych pakietów rdzenia oraz w sprężystej talerzowej płycie
dociskowej. Wyznaczony rozkład strat pozwolił oszacować przyrosty temperatur, istotnych
dla układu izolacyjnego uzwojeń i parametrów wytrzymałościowych płyty dociskowej.
Zastosowanie modeli matematycznych, dedykowanych dla poszczególnych typów maszyn
elektrycznych i transformatorów, obejmujących rozkład: pól elektromagnetycznych, sił
elektrodynamicznych (rys. 9), strat i związanych z nimi przyrostów temperatury, pozwala w
krótkim czasie oszacować charakter i wielkość poszczególnych zjawisk.
Rys. 9. Rozkład wypadkowej liniowej gęstości sił elektrodynamicznych działających na pręt fazowy (przebiegi
czasowe oraz trajektorie wektorów sił) [9]
Kolejną grupę analiz, stanowią obliczenia cieplne [3] (rys. 10) i wentylacyjne.
192
XXI Sympozjum PTZE, Lubliniec 2011
a)
b)
pręt uzwojenia
1
2
3
kanał chłodzący
4
5
6
wstawka izolacyjna
7
Rys. 10. Uzwojenie wzbudzenia generatora 200MW: przekrój poprzeczny żłobka wirnika (a)
oraz model cieplny (b) [4]
Na podstawie obliczonych wartości sił elektrodynamicznych, temperatury, obciążeń
mechanicznych statycznych i dynamicznych oraz przyjętych kryteriów optymalizacyjnych,
przeprowadzana jest analiza wytrzymałościowa konstrukcji (rys. 11).
b)
a)
Rys. 11. Model dyskretny korpusu generatora 560MW (a) oraz model kadzi transformatora 173MVA (b)
z mapą naprężeń mechanicznych
Zastosowanie Metody Elementów Skończonych dla obliczeń wytrzymałościowych, pozwala
uzyskać mapy rozkładu naprężeń w konstrukcji. Rozkład sił, jak w przypadku kadzi
transformatora (Rys. 11b), wyznaczany jest dla kilku przypadków obciążenia, m.in.: próżnią,
nadciśnienia oraz w trakcie pracy na stanowisku i w transporcie.
W oparciu o wyniki pobrane z analizy wytrzymałościowej, przeprowadzana jest analiza
modalna konstrukcji korpusu stojana generatora (rys.12). Wyznaczenie częstotliwości drgań
własnych korpusu, pozwala uniknąć zjawiska rezonansu podczas pracy maszyny.
a)
b)
Rys. 12. Poziom częstotliwości drgań własnych korpusu stojana generatora 560MW (a)
w zależności od grubości płaszcza (b) [5]
193
XXI Sympozjum PTZE, Lubliniec 2011
Poszukiwanie warunków korelacji pomiędzy wszystkimi przeprowadzanymi obliczeniami,
opracowanie coraz doskonalszych modeli matematycznych, pozwalających odzwierciedlić z
coraz to mniejszym błędem warunki rzeczywiste oraz określenie stopnia uproszeń modeli
numerycznych i ocena ich wpływu na wyniki obliczeń, jest procesem skomplikowanym i
podlegającym ciągłemu doskonaleniu.
3.4. Oprogramowanie CAD
Proces projektowania z zastosowaniem systemu CAD, który jest oparty na w pełni
parametrycznym środowisku 3D (rys. 13), pozwala na integrację wszystkich jego etapów,
począwszy od wykonania pomiarów, modeli koncepcyjnych, opracowania i obliczeń
konstrukcji, do wytworzenia i weryfikacji parametrów urządzenia.
a)
b)
Rys. 13. Parametryczne modele 3D autotransformatora 160MVA (a) i stojana generatora TWW-560 (b)
Zintegrowany system CAD pozwala na równoczesną, współbieżną pracę zespołu
projektowego złożonego z konstruktorów, technologów oraz analityków (rys. 14).
Konstruktor
Konstruktor ds. obliczeń
numerycznych
Konstruktor
Konstruktor
Technolog
Szef Projektu
SERWER
Rys. 14. Schemat zintegrowanego systemu komputerowego CAD [6]
Na podstawie wirtualnych, parametrycznych modeli 3D, generowana jest dokumentacja
wykonawcza 2D oraz karty technologiczne. Ponadto, używając powiązanego
oprogramowania CAM generowane są programy obróbcze na obrabiarki CNC (rys. 15), które
za pomocą odpowiednich postprocesorów tłumaczone są na kody maszynowe. Kolejnym
krokiem jest wysłanie kodów siecią intranetową do sterowników maszyn.
194
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 15. Obróbka kołpaka wirnika (a) oraz piasty wentylatora (b) na frezarce CNC
Wykonane modele 3D są również podstawą do weryfikacji poprawności geometrii
wytworzonych obiektów za pomocą współrzędnościowych maszyn pomiarowych.
Możliwości wizualizacji urządzenia już na etapie procesu projektowania (rys. 16), pozwalają
zapoznać się wykonawcy i odbiorcy z końcowym efektem prac.
a)
b)
Rys. 16. Komputerowa wizualizacja (a) i zdjęcie rzeczywistego transformatora blokowego 305MVA (b)
Zastosowanie środowiska parametrycznego, pozwala tworzyć wielowariantowe koncepcje
modyfikowane na poziomie modelu 3D, które znajdują automatyczne odzwierciedlenie w
dokumentacji 2D, środowisku obliczeniowym oraz systemach CAM.
3.5. Dobór materiałów
Wśród materiałów stosowanych w konstrukcjach transformatorów i maszyn elektrycznych,
można wyróżnić kilka grup:
materiały elektroizolacyjne,
materiały żelazne (magnetyczne i niemagnetyczne),
materiały nieżelazne,
materiały kompozytowe.
Nowoczesne materiały konstrukcyjne charakteryzują się podwyższonymi własnościami
wytrzymałości mechanicznej i elektrycznej, co bezpośrednio przekłada się na niezawodność
konstrukcji oraz zmniejszenie gabarytów i masy (rys. 17).
195
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 17. Sprężysta talerzowa płyta dociskowa ze stopu aluminium, prasująca rdzeń generatora 230MW
Materiały kompozytowe są stosowane jako elementy usztywnień uzwojeń i konstrukcji
wsporczych torów prądowych. Najczęściej są to materiały zbrojone włóknem szklanym lub
węglowym nasycone żywicą epoksydową. Zastosowanie odpowiednich metod łączenia
materiałów konstrukcyjnych różnych typów, pozwala wykonać bariery cieplne, elektryczne i
elektromagnetyczne, które jednocześnie spełniają rygorystyczne założenia związane np. z
wytrzymałością dynamiczną.
4. Dokumentacja techniczna, CAD/CAM
Wynikiem końcowym etapu projektowana jest dokumentacja techniczna, wygenerowana z
parametrycznych modeli 3D. Składa się ona z kilku członów:
dokumentacji technicznej rysunkowej, zawierającej wygenerowane rysunki
wykonawcze elementów oraz rysunki złożeniowe poszczególnych podzespołów,
dokumentacji technologicznej, zawierającej opis technologii wykonania elementów i
zespołów,
kodów maszynowych obrabiarek sterowanych numerycznie (CNC) wraz opisem
ustawienia baz przedmiotu,
modeli porównawczych dla współrzędnościowych maszyn pomiarowych,
wykorzystywanych do weryfikacji wyprodukowanych obiektów.
Wszystkie wymienione części składowe dokumentacji są ze sobą ściśle powiązane dzięki
zastosowaniu zintegrowanego środowiska projektowego.
5. Wytwarzanie
5.1. Materiały
Oprócz geometrii wykonywanego przedmiotu, typ i własności materiału determinują przyjęty
proces jego obróbki, gdyż właśnie one charakteryzują jego zachowanie się w czasie procesów
produkcyjnych. W oparciu o wyniki prób i testów materiałów konstrukcyjnych, definiowany
jest proces obróbki i dobór narzędzi.
Przykładem mogą być dwa rodzaje materiałów, wchodzących w skład konstrukcji maszyn
elektrycznych i transformatorów: materiały niemagnetyczne oraz materiały elektroizolacyjne
zbrojone włóknem szklanym.
W przypadku materiałów niemagnetycznych niewłaściwie dobrane parametry i sposób
obróbki, mogą powodować pogorszenie ich własności magnetycznych. Konsekwencją tego
jest wzrost strat i przyrostu temperatury w maszynie.
196
XXI Sympozjum PTZE, Lubliniec 2011
W przypadku materiałów elektroizolacyjnych problemem jest ich „trudna‖ obróbka oraz brak
typowych narzędzi skrawających. Podczas obróbki z użyciem chłodziwa, istnieje możliwość
rozwarstwienia materiału i penetracji cząsteczek wody w głąb materiału, natomiast podczas
obróbki na sucho, występuje bardzo duże zapylenie oraz przyśpieszone zużycie narzędzi.
Określenie zatem właściwego rodzaju obróbki i jej parametrów oraz typu narzędzi dla
stosowanych materiałów, wpływa w zasadniczy sposób na optymalizację procesu
wytwarzania.
5.2. Technologie
W produkcji maszyn elektrycznych i transformatorów szczególne znaczenie mają stosowane
technologie w procesach międzyoperacyjnych i montażu. Wśród nich można wyróżnić
między innymi:
pakietowanie rdzeni,
klinowanie uzwojeń w żłobkach,
wykonywanie izolacji głównej uzwojeń stojanów generatorów,
usztywnianie części czołowych uzwojeń stojanów generatorów,
lutowanie połączeń wodno-prądowych uzwojeń stojanów generatorów,
wyważanie i odwirowanie wirników,
nawijanie uzwojeń transformatorów,
suszenie uzwojeń w technologii próżniowej,
Dobór odpowiednich parametrów dla technologii zastosowanej w każdej fazie procesu
wytwarzania, wpływa bezpośrednio na własności elektryczne i mechaniczne, a w efekcie na
jakość produkowanych urządzeń.
5.3. Park maszynowy
Zastosowanie w procesie wytwarzania urządzeń, maszyn sterowanych numerycznie (CNC)
pozwoliło powiązać proces projektowania komponentów z ich wykonaniem. Dotyczy to
zarówno obrabiarek, jak również pras hydraulicznych i automatycznych oplatarek do uzwojeń
(rys. 18).
a)
b)
Rys. 18. Prasa hydrauliczna (a) oraz oplatarka CNC (b) do uzwojeń stojanów generatorów
Wysokowydajne obrabiarki CNC pozwalają wykonać przedmioty o dowolnej geometrii
w znacząco krótszym czasie, w porównaniu z maszynami tradycyjnymi. Ponadto,
zastosowanie sond pomiarowych geometrii przedmiotów i narzędzi, eliminuje błędy związane
z ustawieniami baz obróbczych przedmiotów i wpływ zużycia narzędzi. Jednostki sterujące
w nowoczesnych maszynach CNC, umożliwiają za pomocą sieci intranetu bezpośrednie
połączenie z komputerami technologów przygotowujących programy sterujące. Technolodzy
mają jednocześnie wgląd w bazy narzędzi maszyn oraz podgląd aktualnego stanu pracy
maszyny.
197
XXI Sympozjum PTZE, Lubliniec 2011
5.4. Pomiary i badania
W procesie wytwarzania maszyn elektrycznych i transformatorów, weryfikuje się geometrię
wykonanych elementów i podzespołów za pomocą współrzędnościowych maszyn
pomiarowych (rys. 19), wykorzystując porównanie modeli 3D z obiektami rzeczywistymi.
a)
b)
Rys. 19. Weryfikacja geometrii uzwojenia stojana generatora (a)
współrzędnościowym ramieniem pomiarowym (b)
Każdy wyrób podlega badaniom i próbom końcowym (rys. 20), spośród których wymienić
należy m.in.:
elektryczne,
mechaniczne,
cieplne,
szczelności.
a)
b)
Rys. 20. Próby końcowe transformatora 270MVA/400kV (a)
oraz próba ciśnieniowa korpusu generatora 560MW (b)
Spełnienie wszystkich wcześniej założonych kryteriów oceny wyrobu, kończy proces
wytwarzania.
6. Produkt
Końcowym rezultatem procesu projektowania i wytwarzania jest gotowy produkt, spełniający
wszystkie przyjęte wcześniej dane wejściowe dotyczące wymagań klienta, przepisów
prawnych i standardów technicznych, przy zachowaniu konkurencyjnej ceny.
198
XXI Sympozjum PTZE, Lubliniec 2011
Kolejnym etapem jest zbieranie informacji z monitoringu pracy jednostki w czasie jej
eksploatacji, wykonanych pomiarów diagnostycznych oraz z przeprowadzonego procesu
walidacji produktu. Wygenerowane informacje wykorzystywane są w procesie projektowania
kolejnych, nowych typów maszyn elektrycznych i transformatorów.
7. Podsumowanie
Zaprezentowane w referacie nowoczesne techniki projektowania i wytwarzania maszyn
elektrycznych i transformatorów, obejmują obszary analiz matematycznych, prac nad
wdrażaniem nowoczesnych materiałów konstrukcyjnych, doskonalenia procesów
technologicznych, rozwijania systemów CAD/CAM/CAE, maszyn i technologii obróbki, oraz
metodologii pomiarów i badań.
Zaawansowane techniki projektowania oraz nowoczesny park technologiczny, pozwalają na
optymalizację parametrów technicznych produktu, spełnienie wysokich dla niego wymagań
jakościowych, środowiska i bezpieczeństwa eksploatacji.
Optymalizacja procesu projektowania i wytwarzania w efekcie finalnym zmniejsza
jednostkowy wskaźnik zużycia materiałów i pracochłonności dla wytworzenia produktu, co
wpływa na obniżenie jego ceny a więc wzrost konkurencyjności na rynku.
8. Literatura
[1] Sieradzki S., Adamek J., Otte J., Dziuba J., Prysok E.: Nowa konstrukcja wentylatorów do generatorów dużej
mocy, Energetyka, nr 08/09, 2007
[2] Wiak Sł., Komęza K., Drzymała P., Wefle H.: Obliczenia struktur płaskich (2D) turbogeneratorów o mocach
230MW i 560MW. Dokumentacja „Energoserwis‖ S.A., 2008
[3] Sieradzki S., Adamek J., Krok R.: Modernizacje turbogeneratorów polegające na zamianie układu chodzenia
uzwojenia wzbudzenia z pośredniego na bezpośredni zabierakowy na przykładzie turbogeneratora typu TWW30-2. XLII International Symposium on Electrical Machines SME'2006, Kraków, 3-6.07.2006, ss.331-334
[4] Krok R., Sieradzki S., Adamek J.: Zastosowanie sieci cieplno-elektrycznych w systemie komputerowego
wspomagania projektowania generatorów synchronicznych. XLII International Symposium on Electrical
Machines SME'2006, Krakow, 3-6.07.2006, ss.139-142
[5] Maniara R., Kardas D.: Parametryczna optymalizacja korpusu stojana generatora, Urządzenia dla energetyki,
nr 5/2008, pp. 24-25
[6] Kulik A., Kardas D.: Nowe techniki projektowania na tle wzrostu innowacyjności produktów firmy
Energoserwis S.A., XV konferencja Energetyki, Ryn 05-07.09.2007, ss.248-255
[7] R.E. Fenton, D.R. Ulery, D.N. Walker: Advances in Design Practices to Improve Rotor Dynamics
Performance of Medium Sized Generators, CIGRE Paper 11-205, 1994
[8] R.D. Stancheva, I.I. Iatcheva: 3-D Electromagnetic Force Distribution in the End Region of Turbogenerator,
IEEE Transactions on Magnetics, Vol. 45, Nr 3, 03.2009
[9] B. Drak: Zagadnienia elektromechaniczne czół uzwojeń stojanów maszyn elektrycznych dużej mocy prądu
przemiennego, Zeszyty naukowe Politechniki Śląskiej, Elektryka z 163, Gliwice 1998.
Autorzy
dr inż. Stefan Sieradzki,
Dyrektor ds. Technicznych i Rozwoju,
e-mail: [email protected]
dr inż. Damian Kardas,
Główny specjalista ds. Rozwoju Produktu
i Marketingu
e-mail: [email protected]
TurboCare Poland S.A.
ul. Powstańców Śląskich 85, 42-701 Lubliniec
199
XXI Sympozjum PTZE, Lubliniec 2011
ODWZOROWANIE STANOWISKA PRACY
W NUMERYCZNEJ OCENIE NARAŻENIA
NA POLE ELEKTOMAGNETYCZNE NA PRZYKŁADZIE
OPERATORÓW RADIOSTACJI PLECAKOWYCH
Jaromir Sobiech, Jarosław Kieliszek, Wanda Stankiewicz
Zakład Ochrony Mikrofalowej
Wojskowy Instytut Higieny i Epidemiologii, Warszawa
Wstęp
Obowiązujące w Polsce regulacje prawne dotyczące ochrony pracowników przed wpływem
pola elektromagnetycznego [1] nie rozróżniają ekspozycji całego ciała i ekspozycji
miejscowej. Wyjątek dotyczy pracowników obsługujących źródła niskiej impedancji (gdzie
dominuje składowa magnetyczna) w zakresie częstotliwości do 800 kHz.
Regulacja ta mocno ogranicza warunki użytkowania licznej grupy urządzeń łączności
bezprzewodowej pracujących w zakresie VHF, takich jak radiotelefony, czy radiostacje
plecakowe. Przyczyną tej sytuacji jest znacząca (jak na przepisy bhp) wartość natężenia pola
elektromagnetycznego w bezpośrednim sąsiedztwie anten tych urządzeń (15-30 cm od
anteny). Wartości te przyjmowane są przeważnie za miarę narażenia pracownika na pole
elektromagnetyczne wytwarzane przez te urządzenia. Tymczasem w polu o dużych
wartościach znajduje się jedynie fragment głowy, ramion i dłonie operatora. Co więcej, jak
pokazaliśmy w dotychczasowej pracy [2, 3], w zakresie VHF obserwuje się zdecydowanie
większe, jak w głowie, pochłanianie energii pola elektromagnetycznego np. w nogach, które
znajdują się w polu o wartościach nawet dwa rzędy mniejszym, jak to, które jest podstawą do
oceny ekspozycji przy obsłudze danego urządzenia. Dlatego też trudno jest łączyć rzeczywiste
narażenie pracownika z wartością pola w pobliżu anteny obsługiwanego urządzenia.
Problem ten rozwiązuje dyrektywa 2004/40/WE, w której pracodawca ocenia oraz, w razie
potrzeby, dokonuje pomiarów i/lub obliczeń poziomu pól elektromagnetycznych, na których
działanie narażeni są pracownicy. Jeżeli dopuszczalne wartości miar zewnętrznych
ekspozycji, są przekroczone, pracodawca dokonuje oceny, oraz w razie potrzeby, obliczeń,
czy przekroczone zostały dopuszczalne wartości miar wewnętrznych ekspozycji [4]. Miarami
zewnętrznymi w zakresie VHF są: natężenie pola elektrycznego i natężenie pola
magnetycznego, zaś miarami wewnętrznymi – szybkość pochłaniania właściwego SAR i prąd
indukowany w ciele człowieka (gęstość prądu).
Niezależnie od wybranej miary wewnętrznej oraz sposobu jej wyznaczenia należy zachować
identyczne z rzeczywistymi warunki ekspozycji na pole elektromagnetyczne. O ile w
przypadku pomiaru jest to łatwe, o tyle w przypadku obliczeń wiąże się z odtworzeniem w
środowisku komputera źródła pola, przestrzeni w której pracownik się znajduje oraz
zamodelowania interakcji pola elektromagnetycznego z organizmem człowieka.
Uszczegóławianie takiego modelu prowadzi do wydłużenia obliczeń, zaś nadmierne
upraszczanie – do utraty informacji o rzeczywistym narażeniu pracownika. Naszym celem jest
200
XXI Sympozjum PTZE, Lubliniec 2011
znalezienie kompromisu między stopniem uszczegóławiania modelu a uzyskaniem użytecznej
informacji o narażeniu pracownika.
Metoda
W pracy skupiono się na wyznaczaniu prądu indukowanego w ciele pracownika
obsługującego radiostację plecakową w różnych warunkach otoczenia.
Model pracownika oparto na bibliotece The Visible Human [5]. Wykorzystano model
jednorodny. Przyjęto założenie, że parametry elektryczne całego organizmu są równe dwóm
trzecim odpowiednich wielkości mierzonych dla mięśnia szkieletowego [6, 7]. Opracowanie
numerycznego
modelu
radiostacji
poprzedzono
pomiarami
rozkładu
pola
elektromagnetycznego w strefie bliskiej jednej w wykorzystywanych w wojsku radiostacji
plecakowych. Model radiostacji optymalizowano pod kątem podobieństwa wytwarzanego
przez niego pola do wartości zmierzonych w otoczeniu rzeczywistej radiostacji. Model
pracownika obsługującego radiostację zwalidowano pomiarami prądów indukowanych w
ciele operatora radiostacji. Pomiary wykonano miernikiem ETS-Lindgren HI-4416 sondą
prądów indukowanych HI-3702.
W środowisku komputera analizowano następujące warianty otoczenia pracownika: 1)
operator stoi na ziemi, w jego pobliżu nie ma żadnych przedmiotów, 2) operator znajduje się
w pomieszczeniu o wysokości 3 m w odległości 50 cm od jednej ze ścian, 3) operator
znajduje się na zewnątrz budynku w odległości 50 cm od pięciometrowej ściany, 4) operator
znajduje się na zewnątrz budynku w odległości 2 m od pięciometrowej ściany.
Dobór otoczenia, w którym umieszczono model operatora został podyktowany typowymi
warunkami eksploatacji radiostacji plecakowych, tj. pracą w otwartym terenie oraz pracą
w warunkach zabudowy mieszkaniowej.
Wyniki analizy przedstawiono na rysunkach 1 i 2.
Rys. 1. Wpływ przedmiotów w otoczeniu pracownika na narażenie na pole elektromagnetyczne na przykładzie
obliczeń rozkładu gęstości prądu indukowanego w nodze operatora radiostacji plecakowej (częstotliwość
nadawania: 70 MHz, kolejno od lewej: 1) brak przedmiotów w otoczeniu operatora, 2) operator znajduje się w
pomieszczeniu o wysokości 3 m, 3) operator znajduje się 50 cm od ściany parterowego budynku, 4) operator
znajduje się 2 m od ściany parterowego budynku
201
XXI Sympozjum PTZE, Lubliniec 2011
J
4,5
[A/m2] 4
brak przedmiotów w
otoczeniu operatora
3,5
operator w pomieszczeniu
o wysokośći 3 m
3
operator 50 cm od ściany
parterowego budynku
2,5
operator 2 m od ściany
parterowego budynku
2
1,5
1
f [MHz]
20
30
40
50
60
70
80
90
Rys. 2. Największa lokalna wartość gęstości prądu indukowanego w nodze operatora radiostacji plecakowej
Podsumowanie
Wyniki analizy wskazują ma możliwość budowania uproszczonych modeli stanowisk pracy
operatorów urządzeń łączności bezprzewodowej pracującej w zakresie VHF. W modelach
tych należy jednak zwrócić uwagę na położenie elementów otoczenia, które korespondują
wymiarami z długością fali, na której prowadzona jest łączność.
Literatura
[1] Rozporządzenie Ministra Pracy i Polityki Społecznej z dnia 29 listopada 2002 r. w sprawie najwyższych
dopuszczalnych stężeń i natężeń czynników szkodliwych dla zdrowia w środowisku pracy
[2] Kieliszek J., Sobiech J., Pomiary prądów indukowanych jako element oceny ekspozycji obsługi
przenośnych radiostacji plecakowych, Przegląd Elektrotechniczny, 2009, 12, 73-75
[3] Kieliszek J., Sobiech J., Stankiewicz W., Rongies W., Pomiary prądów indukowanych jako element oceny
ekspozycji zawodowej na pole elektromagnetyczne, Przegląd Elektrotechniczny, 2010, 12, 65-67
[4] Dyrektywa 2004/40/WE Parlamentu Europejskiego i Rady z dnia 29 kwietnia 2004 r. w sprawie
minimalnych wymagań w zakresie ochrony zdrowia i bezpieczeństwa dotyczących narażenia pracowników
na ryzyko spowodowane czynnikami fizycznymi (polami elektromagnetycznymi)
[5] U.S. National Library of Medicine, The Visible Human Project
[6] Durney C. H., Massoudi H., lskander M. F., Radiofrequency Radiation Dosimetry Handbook (Fourth
Edition), Brooks Air Force Base, 2002
[7] Italian National Research Council, Institute for Applied Physics "Nello Carrara" – Florence, Calculation of
the Dielectric Properties of Body Tissues in the frequency range 10 Hz – 100 GHz
202
XXI Sympozjum PTZE, Lubliniec 2011
IMMUNOMODULACYJNE DZIAŁANIE POLA 900MHZ
Wanda Stankiewicz, Marek J. Dąbrowski, Jarosław Kieliszek, Jaromir Sobiech,
Paweł Bodera, Andrzej Krawczyk, Maciej P. Dąbrowski
Wojskowy Instytut Higieny i Epidemiologii,
Zakład Ochrony Mikrofalowej, Warszawa
Wstęp
Rosnące od wielu lat zainteresowanie biologicznym wpływem pól elektromagnetycznych(
PEM ) nie przyniosło, jak dotychczas, jednoznacznych wyników określających ich swoiste
efekty oddziaływania. Przyjmując, że swoisty efekt biologiczny to określona zmiana struktury
i/lub funkcji biologicznego układu, przypisana znanej jakości i dawce PEM, należy przyznać,
że jedynie zmiany termiczne wywołane przez PEM, odpowiadają temu kryterium. Natomiast
wyniki badań nietermicznych intensywności PEM nie wykazują pełnej charakterystyki efektu
swoistego.
Zgodnie z raportem WHO , należy na razie przyjąć ogólnikowy i wymagający naukowej
weryfykacji pogląd, że nietermiczne intensywności RF i MF mogą stanowić „słaby czynnik
oddziaływania biologicznego‖ (3). Badania wpływu słabych czynników biologicznych
wymagają zastosowania odpowiednio czułych detektorów oceny .W perspektywie dalszych
badań zmierzających do określenia biologicznych wpływów słabych PEM zasadnicze
znaczenie mają dobrze kontrolowane dozymetrycznie, ekspozycje układów odpowiedzialnych
za stan homeostatycznej równowagi zdrowotnej organizmu na różne częstotliwości i długości
fal RF/MF. Do takich układów, poza układem nerwowym i hormonalnym, należy układ
odpornościowy, tworzący w czynnościowym powiązaniu z poprzednimi t.zw. sieć neurohormonalno-odpornościową odpowiedzialną za prawidłowy przebieg metabolicznych,
obronnych, immunoregulacyjnych i regeneracyjnych funkcji organizmu.
Celem doświadczeń nad wpływem PEM na izolowane komórki odpornościowe było
stwierdzenie czy obserwowane immunotropowe oddziaływania PEM wynikają
z bezpośredniego wpływu na komórki odpornościowe oraz czy ewentualne zmiany
w badaniach in vitro dotyczą w równym stopniu komórek pobranych od 20 zdrowych i 15
chorych na atopowe zapalenie skóry (coraz częściej występującej choroby alergicznej )
Przedmiotem badań była ocena czynnościowa limfocytów T:
a/ich zdolności proliferacyjnych w odpowiedzi na miogeny PHA, ConA
b/właściwości pro- , przeciwzapalnych i immunoregulacyjnych poprzez określenie stężenia
cytokin IL-6,IL-10, TGFβ ,wskaźnika LM i SAT.
Dla zbliżenia doświadczalnego układu in vitro do warunków in vivo, w których wpływ PEM
odnosi się w głównej mierze do komórek znajdujących się w aktywnych fazach cyklu (G1, S,
G2), należało eksponować komórki na wpływ PEM w trakcie hodowli (2).
W tym celu w Zakładzie Ochrony Mikrofalowej WIHE skonstruowano specjalną komorę
bezechową, którą zainstalowano w inkubatorze ASSAB służącym do hodowli tkankowych
(37oC, 5%CO2, wilgotność względna 90%). W komorze, pod płytką z mikrohodowlami,
umieszczono emiter PEM (900 MHz, natężenie pola elektrycznego 20V/m, SAR 0.03 W/kg,
203
XXI Sympozjum PTZE, Lubliniec 2011
czas ekspozycji po 15 min. w kolejnych dniach hodowli) (3). Parametry czynnościowe
porównywano z wynikami hodowli nie poddawanych polu elektromagnetycznemu
Wyniki
Wyniki przedstawiono w tabeli 1 i 2.
Tabela 1.
Wartości odpowiedzi proliferacyjnej na PHA i ConA oraz wartości wskaźnika LM i SAT w grupie chorych z AZS
oraz grupie kontrolnej
Badany parametr
PHA
Grupa chorych
GK
AZS
k
81031,71021,2
72251,71215,1
77000,5897
80123,61008
21343,6981,3
36720,5871,9
34215,7943*
35210,81176
(dpm x /hod)
Bez PEM
PHA
(dpm x /hod)
Z PEM
ConA
(dpm x /hod)
Bez PEM
ConA
(dpm x /hod)
z PEM
P/C
1,3
1,970,2
2,20,2*
1,90,5
18,54,1
3,52,1
10,31,9*
8,22,3*
3,92,9
321,5
26,83,2*
39,52,7*
3,79
Bez PEM
P/C
z PEM
LM (%)
Bez PEM
LM (%)
z PEM
SAT(%)
Bez PEM
SAT(%)
z PEM
*różnice statystycznie znamienne p<0,05
204
XXI Sympozjum PTZE, Lubliniec 2011
Tabela 2. Wartości średnie odchylenie standardowe stężenia IL-10, TGFβLoceniane w i nadsączu
hodowli limfocytów pacjentów z AZS i osób stanowiących grupę kontrolną przed i po PEM
oceniane
grupy
IL-10
TGF-β
IL-6
(pg/ml)
(pg/ml)
(pg/ml)
nadsącz hodowli
nadsącz hodowli
nadsącz hodowli
nadsącz hodowli
nadsącz hodowli
PBMC bez PEM
PBMC z PEM
PBMC bez PEM
PBMC z PEM
PBMC bez PEM
A
B
A
B
A
nadsącz
hodowli
PBMC
z PEM
B
AZS
840210
1287311*
2510349
2720214
912271
412282*
1120340
1311209
2679381
25723421
845250
768200
GK
k
*różnice statystycznie znamiennep<0,05
Posługując się w badaniach własnych metodą hodowli ludzkich limfocytów i monocytów,
zaobserwowaliśmy zmiany czynnościowe w hodowlach ludzkich limfocytów i monocytów.
Badania te wykazały wzrost odpowiedzi limfocytów na PHA w grupie kontrolnej natomiast
niezamienne statystycznie obniżenie w grupie z AZS stąd pod wpływem działanie PEM
normalizacja wyjściowo podwyższonej wartości P/C. Wzrost aktywności monokin pod
wpływem pola ,w grupie zdrowych a obniżenie, wyjściowo podwyższonych wartości LM w
grupie z AZS z wyraźnym obniżeniem wartości IL-6 w grupie z AZS. Wpływ
immunoregulacyjny pola, był wyraźny wyrażony podwyższeniem aktywności supresyjnej
SAT i wzrostem stężenia IL-10.
Podsumowanie
Przedstawione badania wskazują, że ludzkie komórki odpornościowe izolowane z krwi
(limfocyty T, monocyty) bez względu na fazę swego cyklu życiowego, pozostają wrażliwe na
immunomodulacyjne wpływy PEM. Różnice jedynie dotyczą wpływu pola w zależności od
wartości
wyjściowej
badanych
parametrów
.Poprawa
wartości
parametrów
immunoregulacyjnych komórek odpornościowych u chorych z AZS może stanowić
przesłankę do dalszych badań nad immunoterapeutycznym wykorzystaniem jakościowo i
energetycznie określonych PEM.
Piśmiennictwo
[1] Dąbrowski M.P., Stankiewicz W., Kubacki R. i wsp., Immunotropic effects in cultured human blood
mononuclear cells pre-exposed to low-level 1300 MHz pulse-modulated
microwave field.,
Electromagnetic
Biol. Med., 2003, 22, 1, 1 – 13.
[2] Stankiewicz W., Dąbrowski M.P., Kubacki R. i wsp., Immunotropowe oddziaływanie mikrofalowe wobec
pobudzonych in vitro komórek odpornościowych izolowanych z krwi ludzkiej. W: Elektromagnetyzm
w medycynie i biologii, Kubacki R., Krawczyk A.
(red), wyd. Instytut Naukowo Badawczy ZTUREK, Warszawa 2004, 7 – 10.
[3] WHO/INIRC report., Environmental health criteria No 137: Electromagnetic fields (300Hz - 300 GHz),
WHO Genewa, 1993, 1 – 289.
205
XXI Sympozjum PTZE, Lubliniec 2011
DESIGN OF PERMANENT MAGNET SYNCHRONOUS
MACHINE FOR MICRO-HYBRID ELECTRIC VEHICLE
OPERATION
1,2
Bojan Štumberger, 1,2Miralem Hadžiselimović
1,2
1,2
University of Maribor, Faculty of Energy Technology, Slovenia
University of Maribor, Faculty of Electrical Engineering and Computer Science
The paper presents characteristics of a permanent magnet synchronous machine designed for micro-hybrid
electric vehicle operation. Appropriate design of interior permanent magnet machine with 36 stator slots and
8 stator poles for operation in motor and generator operation mode was investigated. Finite element analysis
is employed in order to determine the machine performance.
Introduction
In general, the hybrid electric vehicle should benefit from the best features of both
conventional ICE (internal combustion engine) vehicle and electric vehicle. According to the
grade of hybridization the micro, mild and full hybrid configurations are known. Different
grade of hybridization of hybrid electric vehicles demands quite different role of electric
machine as well. In micro-hybrids systems electric machines should exhibit start/stop,
alternator and sometimes regenerative breaking functions, while electric machine normally
does not supply additional torque when the ICE machine is running. Compared to the
conventional vehicles, micro hybrid systems allow in city driving up to 5-10% fuel savings.
Side-mounted belt-driven starter-generator architecture is presented in this paper. The electric
machine has to enable starting the ICE and to develop additional torque during acceleration of
the vehicle for a short time, typically lower than 8 s.
The torque demand about 120 Nm is required in order to crank the engine (assuming 3:1 gear
ratio using the belt drive, the corner motor speed with maximal torque in the motor operation
mode is around 1500 rpm). Above the corner speed in the motor operation mode, the torque
demand is inversely decreasing with increasing of speed. After certain speed the electric
machine has to transit from motor to generator mode of operation smoothly (typical transition
speed is 2200-3000 rpm). The electric machine used for starter-generator has to enable
regenerative breaking as well, where the maximal regenerative breaking torque value is
similar to the maximal torque value in the motor operation mode. Practically all known
electric machines can be used as starter-generators, however, induction and permanent magnet
machines are frequently used [1-7]. Design of electric machine for starter-generator
application, however, does not represent a straightforward and easy task. There are several
limitations that should be carefully taken into account during the machine design, as for
example: maximum and minimum battery voltage, maximal charging voltage, maximal and
nominal continuous charging and discharging current, cooling conditions and used cooling
media for the machine, torque and current control of the machine, battery power management,
battery cooling capability, etc. According to all mentioned limitations, the interior permanent
magnet machine has been selected for this study, primarily due to the high efficiency in
generator mode of operation and good flux weakening possibility [8], [9]. The results for the
interior permanent magnet machine with 36 stator slots and 8 rotor poles in the motor and
206
XXI Sympozjum PTZE, Lubliniec 2011
generator operation mode (outer stator diameter of 130 mm, inner stator diameter of 80 mm,
active axial length of the machine 90 mm, NdFeB permanent magnets and liquid stator
cooling) are presented in Fig. 1 and Fig. 2.
b)
a)
c)
Fig. 1. Flux distribution over machine cross-section in motor operation mode: (a) no-load case; (b) maximal
torque; (c) maximal flux-weakening
b)
a)
Fig. 2. Calculated performance of 36 slot/8 pole machine: (a) calculated performance in motor mode of
operation; (b) calculated performance in generator mode of operation during regenerative breaking
References
[1] M. Barcaro et al. ―Performance evaluation of an integrated starter alternator using an interior permanent
magnet machine‖, IET Electr. Power Appl., 4 (2010) pp 539
[2] L. Alberti et al. ―IPM machine drive design and tests for an integrated starter alternator application‖,
IEEE Transactions on Industry Applications, 46 (2010) pp 993
[3] L. Chedot et al. ―Integrated starter generator: The need for an optimal design and control approach. Application to
a permanent magnet machine‖, IEEE Transactions on Industry Applications 43 (2007) pp 551.
[4] J. G. Seo et al. ―Rotor-design strategy of IPMSM for 42 V integrated starter generator‖, IEEE Transactions
on Magnetics, 46 (2010) pp 2458
[5] J. Legranger et al. ―Combination of finite element and analytical models in the optimal multidomain design
of the machines: application to an interior permanent magnet starter generator‖, IEEE Transactions on
Industry Applications 46 (2010) pp 232
[6] C. Feng et al. ―The performance research of starter-generator based on reluctance torque used in HEV‖,
IEEE Transactions on Magnetics‖, 45 (2009) pp 635
[7] S. Chen et al. ―Design and testing of a belt-driven induction starter-generator‖, IEEE Transactions on
Industry Applications 38 (2002) pp 1525
[8] B. Ńtumberger et al. ―Power and cooling capability of synchronous generator with interior permanent magnets:
laboratory verification of machine characteristics‖ Przeglad Electrotechniczny, 3 (2011) pp 183.
[9] B. Ńtumberger at al. ―Analysis of iron loss in interior permanent magnet synchronous motor over a wide
range of constant output power operation‖ IEEE Transactions on Magnetics, 36 (2000) pp 1846
207
XXI Sympozjum PTZE, Lubliniec 2011
FLUX-WEAKENING PERFORMANCE
OF FRACTIONAL-SLOT PERMANENT
MAGNET SYNCHRONOUS MOTORS
WITH CONCENTRATED WINDINGS
Bojan Štumberger1,2, Miralem Hadžiselimović1,2
University of Maribor, Faculty of Energy Technology, Slovenia
University of Maribor, Faculty of Electrical Engineering and Computer Science, Slovenia
Abstract: The paper presents a comparison of flux-weakening performance of fractional-slot permanent magnet
synchronous motors with concentrated windings and interior permanent magnets. Inner PM rotor machines with
12 slot/10 poles and 12 slot/8 poles were investigated. Finite element analysis is employed in order to determine
the performance of each motor. It is shown that the flux-weakening performance of the machine is strongly
dependent on the stator slot number/rotor pole number combination, rotor barrier design and on the quality of
used PM material.
Introduction
Fractional-slot permanent magnet (PM) synchronous motors with concentrated windings have
in recent years received particular attention due to the several important advantages in
comparison to the machines with distributed windings. Those advantages can be shortly
assembled in following sentences: shorter end winding length when the machine is built in
concentrated non-overlapping stator windings technology; higher slot fill factor in comparison
to the machines with distributed windings; good flux weakening performance; high torque
and fault tolerant capability; good efficiency, etc. 1,2.
The main disadvantages of fractional-slot PM machines with concentrated windings are as
following: stator magnetomotive force (MMF) distribution contains a large number of space
harmonics; lower and higher order stator MMF harmonics, rotating at speeds different from
the rotor speed, cause localised core saturation, higher iron core losses and eddy current loss
in permanent magnets.
While the use of fractional-slot PM machines with surface mounted PMs is quite frequent, the
use of fractional-slot PM machines built in concentrated non-overlapping stator technology
with rotor magnets buried inside the rotor construction is still limited. Due to the significant
interpole leakage flux the buried PM machines are normally equipped with strong Nd-Fe-B
magnets in order to minimize influence of interpole leakage effect on the machine
performance. However, the price of the Nd-Fe-B magnets during last two years has increased
significantly. Therefore, it would be interesting and important to substitute expensive
Nd-Fe-B magnets with cheaper ferrite magnets without significant lost of machine
performance. The goal of this paper is the attempt to fill the gap in this field.
Method of analysis
The comparison between the flux-weakening performances of PM motors with inner rotor and
embedded PMs is made by the finite element analysis for 12 slot/10 pole and 12 slot/ 8 pole
208
XXI Sympozjum PTZE, Lubliniec 2011
combination. The influence of iron losses on motor performances was considered in the
analysis by the posterior iron loss calculation 3, 4. All motors have to fulfill the same
requested characteristics: nominal torque 1.5 Nm (maximal torque 3 Nm) at 500 rpm and
0.3 Nm at 16000 rpm.
a.)
b.)
Fig. 1. Different machines` cross sections: (a) 12 slot/8 pole PM machine with Nd-Fe-B magnets; (b) 12 slot/8
pole PM machine with ferrite magnets
a.)
b.)
c.)
d.)
Fig. 2. Calculated performance of 12 slot/8 pole machine with Nd-Fe-B magnets: (a) calculated cogging torque
profile; (b) calculated back-EMF waveform at speed 525 rpm; (c) calculated electromagnetic torque ripple at
nominal load and speed 525 rpm; (d) calculated electromagnetic torque ripple at speed 16000 rpm
Results
Machines’ cross sections accounted for in the comparison are presented in Fig.1. In the first
machine with 12 slot/8 poles combination Nd-Fe-B magnets are used in the rotor construction,
while in the second machine the ferrite magnets are used. Calculated values of back EMF
209
XXI Sympozjum PTZE, Lubliniec 2011
waveform, cogging torque and electromagnetic torque ripple over one electrical cycle are
presented in Fig. 2 for the machine with Nd-Fe-B magnets. Results for the 12 slot/8 pole and 12
slot/10 pole machines with ferrite magnets will be presented in the full paper version.
References
[1]
[2]
[3]
[4]
J. Cros et al. IEEE Trans. Energy Convers. 17 (2002) 248.
N. Bianchi et al. IEEE Trans. Energy Convers. 24 (2009) 323.
B. Ńtumberger et al. J. Magn. Magn. Mater. 215 (2000) 753.
B. Ńtumberger et al. J. Magn. Magn. Mater. 245 (2003) 269.
210
XXI Sympozjum PTZE, Lubliniec 2011
WPŁYW WARUNKÓW PRACY NA PARAMETRY
ZANIKANIA NADPRZEWODZENIA W PRZEWODZIE
NADPRZEWODNIKOWYM MgB2/Cu
Paweł Surdacki
Politechnika Lubelska, Instytut Podstaw Elektrotechniki i Elektrotechnologii
Ulepszenie technologii wytwarzania kompozytowych przewodów nadprzewodnikowych
MgB2/Cu otwiera coraz większe możliwości zastosowania tych przewodów
w silnoprądowych urządzeniach nadprzewodnikowych. Temperatura krytyczna dwuborku
magnezu MgB2 Tc= 39 K umożliwia pracę tego nadprzewodnika w kąpieli ciekłego wodoru
(20 K) lub w zakresie temperatur 20 - 30 K zapewnianej przez kriochłodziarki mechaniczne.
Praca przewodów kompozytowych z włókien MgB2 stabilizowanych miedzią przy
gęstościach prądu zbliżonych do gęstości prądu krytycznego wymaga zapewnienia stabilności
termicznej wobec zewnętrznych zaburzeń energetycznych [1], które mogą wywołać
niekontrolowaną lawinową utratę nadprzewodzenia prowadzącą do przegrzania i zniszczenia
przewodu jak też całego uzwojenia nadprzewodnikowego. W celu zaprojektowania stabilnej
i bezpiecznej pracy przewodów nadprzewodnikowych w takich warunkach, opracowano
model matematyczny termicznych stanów dynamicznych zanikania nadprzewodzenia [2,3].
W niniejszej pracy, korzystając z opracowanego modelu i programu dokonano określenia
wpływu temperatury T0 przewodu oraz prądu roboczego Ir na wybrane parametry
dynamicznego procesu zanikania nadprzewodzenia: minimalnej energii utraty
nadprzewodzenia Eq, temperatury zaburzenia Tz, temperatury utraty nadprzewodzenia Tq
i czasu utraty nadprzewodzenia tq (rys. 1). Temperatura w miejscu zaburzenia po osiągnięciu
lokalnego maksimum Tz maleje, a następnie w zależności od wartości dostarczonego impulsu
energetycznego w danych warunkach pracy, powraca do wartości początkowej (odzyskanie
nadprzewodzenia) albo rośnie w sposób lawinowy i niekontrolowany (całkowita utrata
nadprzewodzenia.
Wzrost względnego prądu roboczego ir (odniesionego do prądu krytycznego nadprzewodnika
Ic) oraz temperatury T0 przewodu powoduje istotne obniżenie wartości minimalnej energii
utraty nadprzewodzenia Eq (rys. 2), pogarszając tym samym warunki stabilności termicznej
przewodu nadprzewodnikowego. Powyższe parametry robocze przewodu wpływają również
na wartości parametrów stanów dynamicznych: temperatury zaburzenia (rys. 3), temperatury
utraty nadprzewodzenia (rys. 4) i czasu utraty nadprzewodzenia (rys. 5) dla wyznaczonych
wartości minimalnej energii utraty nadprzewodzenia przy założonych warunkach pracy.
211
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 1.
Przebieg temperatury w miejscu poddanym zaburzeniu
energetycznemu podczas dynamicznego procesu
zanikania nadprzewodzenia;
Parametry procesu:
tz – czas trwania zaburzenia
Tz – maksymalna temperatura zaburzenia,
tz – czas utraty nadprzewodzenia
Tq - temperatura utraty nadprzewodzenia.
Rys. 2. Zależność minimalnej energii utraty
nadprzewodzenia Eq od temperatury roboczej T0
przewodu MgB2/Cu przy różnych wartościach
względnego prądu roboczego ir = Ir/Ic(T)
Rys. 4. Zależność temperatury utraty nadprzewodzenia
Tq od temperatury roboczej T0 przewodu MgB2/Cu
przy różnych wartościach względnego prądu
roboczego ir = Ir/Ic(T)
Rys. 3. Zależność temperatury zaburzenia Tz od
temperatury roboczej T0 przewodu MgB2/Cu przy
różnych wartościach względnego prądu roboczego
ir = Ir/Ic(T)
Rys. 5. Zależność czasu utraty nadprzewodzenia tq od
temperatury roboczej T0 przewodu MgB2/Cu przy
różnych wartościach względnego prądu roboczego
ir = Ir/Ic(T)
Przeprowadzona analiza umożliwia dobranie warunków pracy kompozytowego przewodu
nadprzewodnikowego MgB2/Cu w celu zapewnienia stabilnej pracy nadprzewodnika, tzn.
odzyskania stanu nadprzewodzenia w przypadku wystąpienia lokalnych zaburzeń
energetycznych.
212
XXI Sympozjum PTZE, Lubliniec 2011
Literatura
[1]
[2]
[3]
Martinez E., Munoz O., Angurel L.A., et al., Analysis of the quench onset and propagation in MgB 2
conductors, IEEE Trans. on Appl. Superconductivity, 19 (2009), 3, Part 3, 3533-3536.
Surdacki P., Numeryczny model termicznych stanów dynamicznych przewodów nadprzewodnikowych
z dwuborku magnezu, Proc. XXXIV IC-SPETO, Ustroń, 18-21.05.2011.
Surdacki P., Termiczne stany dynamiczne wysokotemperaturowych przewodów nadprzewodnikowych
z dwuborku magnezu, Przegląd Elektrotechniczny 86 (2010) no. 12, 149-152.
213
XXI Sympozjum PTZE, Lubliniec 2011
DIAGNOSTYKA PATOLOGII RUCHU NA PODSTAWIE
ZREDUKOWANYCH DANYCH KINEMATYCZNYCH
Adam Świtoński1, Romualda Mucha2, Dariusz Danowski3, Monika Mucha2, Grzegorz Cieślar2
Andrzej Polański1, Konrad Wojciechowski1, Aleksander Sieroń2
1
Polsko-Japońska Wyższa Szkoła Technik Komputerowych
2
Śląski Uniwersytet Medyczny,
Katedra i Klinika Chorób Wewnętrznych, Angiologii i Medycyny Fizykalnej
3
Zespół Sanatoryjno-Szpitalny Rehabilitacji Narządu Ruchu, Goczałkowice Zdrój
Wstęp
W opinii lekarzy ortopedów odpowiednio wyszkolony specjalista jest w stanie na podstawie
wizualnej obserwacji chodu pacjenta zauważyć i nazwać występujące w nim patologie. Wadą
percepcyjnej oceny chodu jest jej subiektywizm i brak możliwości wyznaczenia ilościowych
miar zauważonych patologii. Rozwój technik pomiarowych ruchu postaci ludzkiej dostarczył
środków technicznych dla wielomodalnego pomiaru ruchu. Przykładem zaawansowanego
systemu pomiaru ruchu jest Laboratorium Pomiaru Ruchu (HML) http://hm.pjwstk.pl PolskoJapońskiej Wyższej Szkoły Technik Komputerowych umożliwiające jednoczesny
i synchroniczny pomiar ruchu jednej osoby, na który składają się dane pochodzące z czterech
następujących podsystemów: 1)kinematyki ruchu, 2) elektromiografii dynamicznej (EMG) 3)
reakcji sił podłoża (GRF) 4) video. System zapewnia również zapis, odtwarzanie
i przeglądanie danych. Dane pochodzące z wymienionych podsystemów są obszerne,
dokładne i uniwersalne i pozwalają na wieloaspektową analizę ruchu. Ceną płaconą za
możliwość pozyskania takich danych jest koszt aparatury laboratorium i jego niewielka
mobilność. W chwili obecnej pozyskanie trajektorii danych kinematycznych jest możliwe
przy użyciu taniego systemu kamer dostarczającego map głębi, które następnie mogą być
przekształcone do chmury punktów a ta do szkieletu i danych ruchu w formacie Acclaim.
Jednak wcześniej należy zbadać czy dane kinematyczne są wystarczającą podstawą diagnozy.
W związku z powyższym w ramach pracy badane są następujące problemy: i)diagnozy
patologii ruchu, jedynie na podstawie trajektorii danych kinematycznych, ii)redukcji wysokowymiarowych trajektorii danych kinematycznych do mniejszej liczby danych, iii)uzasadnienia
poprawności diagnozy dokonanej na podstawie danych zredukowanych przez porównanie jej
z diagnozą opartą na pełnym zestawie danych możliwych do pozyskania w HML.
Diagnoza patologii ruchu na podstawie danych kinematycznych
Dla celów badań przedstawionych w pracy wybrano patologię ruchu powodowaną chorobą
zwyrodnieniową stawów która jest jednym z najczęściej spotykanych schorzeń układu ruchu
współczesnego człowieka. Miejscami szczególnie narażonymi na zmiany zwyrodnieniowe
jest dolny odcinek kręgosłupa oraz stawy kończyn dolnych, zwłaszcza biodrowe i kolanowe.
Zmiany zwyrodnieniowe stawu biodrowego prowadzą do zaburzenia chodu, wyrażającego się
zaburzeniami faz chodu pacjenta oraz obniżeniem siły mięśniowej obręczy biodrowej po
stronie chorej co powoduje niefizjologiczne ustawienie miednicy, przesunięcie środka
ciężkości, objawiające się utykaniem i chodem kaczkowatym [1] Wykorzystując pełne
możliwości pomiarowe HML, przeprowadzono badania chodu dla grupy 15 osób, wśród
214
XXI Sympozjum PTZE, Lubliniec 2011
których znajdowały się osoby zdrowe i osoby ze zwyrodnieniem stawu biodrowego. Na
podstawie pełnego zestawu danych, lekarze specjaliści ortopedzi sformułowali dla każdej
osoby z badanego zbioru diagnozę jakościową nazywaną dalej referencyjną. Następnie, ci
sami specjaliści sformułowali diagnozę jedynie na podstawie danych kinematycznych. Celem
tej fazy badań było sprawdzenie czy lekarz specjalista może wystawić prawidłową diagnozę
jedynie na podstawie danych kinematycznych. Pozytywna odpowiedź pozwoliła na przejście
do kolejnych faz badań.
Redukcja wymiarowości danych kinematycznych
Kinematyczne dane ruchu są wysoko-wymiarowe. Wynika to z tego, że wzajemna orientacja
„kości‖ połączonych stawem wymaga w przyjętej reprezentacji trzech kątów Eulera co
pomnożone przez założoną liczbę stawów wynoszącą 22 daje po doliczeniu 3 katów
określających orientację względem układu świata 69 wymiarowy zbiór danych dla jednej
chwili dyskretnej. Wizualizacja w postaci krzywej parametrycznej tak wysoko wymiarowych
danych nie jest możliwa podobnie jak ich dalsza analiza i klasyfikacja. Jednocześnie w
literaturze obecna jest hipoteza, że w przypadku chodu dane kinematyczne leżą na jedno
wymiarowej rozmaitości zanurzonej w przestrzeni 69 wymiarowej (69D). W koncepcji pracy
redukcję wymiarowości przeprowadzono w dwóch etapach. W etapie pierwszym
zredukowano wymiarowość reprezentacji pozy z 69D do 3D. W konsekwencji trajektorię
ruchu w której każdy punkt jest reprezentowany przez 69 liczb zredukowano do trajektorii w
przestrzeni 3D. W etapie drugim kierując się zauważonymi cechami kształtu trajektorii 3D a
przede wszystkim jej okresowością wyznaczono dla niej współczynniki transformaty Fouriera
czyli dokonano redukcji wymiarowości w dziedzinie czasu. Ostatecznie wektorem cech dla
klasyfikatora było kilkanaście danych. Do redukcji wymiarowości póz zastosowano technikę
PCA. Największa swoboda występowała w redukcji wymiarowości póz i z tego powodu
badano dane pochodzące z pojedynczego kroku, wielu kroków, bazę lokalną i globalną oraz
różne fragmenty łańcucha kinematycznego. Przykładowe wyniki przedstawiają rys. 1.2.
Rys.2 Współczynniki Fouriera
Rys.1 Trajektorie ruchu po redukcji do 3D
Diagnoza na podstawie danych zredukowanych
Dane kinematyczne zredukowane do postaci modułów współczynników dyskretnej
transformaty Fouriera stosowano jako wektor cech dla klasyfikatora kNN. W badanym
zbiorze osób uzyskano 100% zgodność klasyfikatora z diagnozami lekarzy specjalistów.
215
XXI Sympozjum PTZE, Lubliniec 2011
Dalszych badań wymaga sprawdzenie uzyskanych wyników na większej grupie osób jak
również opracowanie metod liczbowej oceny stopnia patologii.
Literatura
[1] Kiwerski J.: Rehabilitacja medyczna; PZWL, Warszawa 2006;
[2] Witten I., Frank E.: Data Mining: Practical Machine Learning Tools and Techniques, Morgan Kaufmann,
2005
[3] Lee J. A., Verleysen M., Nonlinear Dimensionality Reduction, Springer, 2007.
[4] Locantore N.,Maron J.S., Simpson D.G., Tripoli N., Zhang J.T., Cohen K.L, Robust principal component
analysis for functional data, Test, vol. 8 no. 1,Springer, 1999
[5] Schoelkopf B., Smola A., Mueller K.-R.: Nonlinear Component Analysis as a Kernel Eigenvalue Problem.
Technical Report No. 44, Max-Planck-Institut fuer biologische
Kybernetik, 1996.
216
XXI Sympozjum PTZE, Lubliniec 2011
DIAGNOSTYKA PRZEDNIEGO I TYLNEGO ODCINKA GAŁKI
OCZNEJ Z WYKORZYSTANIEM OBRAZOWANIA
WIELOSPEKTRALNEGO
Adam Świtoński1,2, Tomasz Błachowicz2, Marcin Zieliński3, Marta Misiuk-Hojto3,
Konrad Wojciechowski1,2
1
Polsko-Japońska Wyższa Szkoła Technik Komputerowych
2
Politechnika Śląska
3
Katedra i Klinika Okulistyki Akademii Medycznej we Wrocławiu
Wstęp
Techniczny rozwój systemów akwizycji spowodował pojawienie się nowej klasy obrazów
nazywanych wielospektralnymi i hiperspektralnymi. W przyjętej konwencji obraz
wielospektralny lub hiperspektralny reprezentowany jest przez tak zwaną kostkę obrazową
będącą uporządkowanym według położenia okna spektralnego zbiorem obrazów 2D.
Odpowiednio do tego mówimy o rozdzielczości przestrzennej odnoszącej się do każdego z
obrazów 2D kostki i rozdzielczości spektralnej odnoszącej się do liczby okien/kanałów
spektralnych, a w bardziej pogłębionej analizie również do ich szerokości W kostce
obrazowej z pojedynczym pikselem związany jest wektor, którego składowe są wynikiem
próbkowania widma promieniowania docierającego do układu akwizycji/kamery
hiperspektralnej, a ich liczba jest równa liczbie kanałów spektralnych. Wektor ten bywa
nazywany spektralną sygnaturą piksela. Jest oczywiste, że obraz wielospektralny/multispektralny
dostarcza więcej informacji niż obraz barwny, stąd też diagnoza medyczna wspomagana
obrazowaniem wielospektralnym daje nowe możliwości.
Szczególnie istotne wyzwanie w leczeniu chorób oka stanowią jaskra i retinopatia
cukrzycowa, dwie najczęstsze przyczyny ślepoty, dla których skuteczność leczenia w dużym
stopniu zależy od wczesnej diagnozy. Widoczne objawy jaskry i retinopatii pojawiają sie na
dnie oka. Jaskra charakteryzuje się rozrostem wnęki naczyniowej w stosunku do dysku
optycznego, natomiast retinopatia cukrzycowa wywołuje zmiany patologiczne:
mikroaneuryzmaty, wysieki i wylewy. Trudność w automatycznej detekcji powyższych
struktur anatomicznych i obszarów patologicznych stanowi słaba ich rozróżnialność w
przestrzeniach barw – granice pomiędzy dyskiem optycznym a wnęką naczyniową bardzo
często w ogóle są niewidoczne, rozróżnienie wysięków od dysku optycznego możliwe jest
jedynie ze względu na ich kształt, zaś kontrast pomiędzy siatkówką, a mikroaeuryzmatami,
wylewami i naczyniami krwionośnymi jest słaby. W związku z powyższym, zastosowanie
obrazowanie wielospektalnego jest uzasadnione.
Akwizycja obrazów wielospektralnych
Pierwszym etapem w opracowaniu wielospektralnego systemu diagnostyki gałki ocznej jest
budowa urządzenia do akwizycji wielospektralnej. W tradycyjnych badaniach okulistycznych
powszechnie stosowanym przyrządem jest lampa szczelinowa. Zamontowana w niej szczelina
217
XXI Sympozjum PTZE, Lubliniec 2011
umożliwia uzyskanie przekroju optycznego wnętrza oka. Regulując kąt ustawienia szczeliny
możemy odpowiednio podświetlać różne struktury gałki ocznej i obserwować je w
powiększeniu za pośrednictwem mikroskopu, będącego jego integralną częścią. Do okularu
końcowego lampy szczelinowej dociera pełne promieniowanie elektromagnetyczne
pochodzące od obserwowanego obiektu, które to dopiero przez narząd wzroku diagnosty
zamieniane jest na obraz barwny. Tak więc lampa szczelinowa może stanowić również
urządzenie wejściowe dla dalszej akwizycji wielospektralnej, służące jako przyrząd optyczny
skupiający promieniowanie pochodzące od wybranego fragmentu gałki ocznej.
Opracowane system akwizycji wielospektralnej zaprezentowano na Rys. 1. Kluczowym
elementem systemu jest sterowany napięciowo filtr ciekłokrystaliczny. Istotą filtru jest
tworzenie okna przepuszczalności promieniowania w zależności od podanego na filtr
napięcia. Promieniowanie po przejściu przez filtr rejestrowane jest przez wysokiej czułości
kamerę monochromatyczną z matrycą CCD. Cały proces jest powtarzany niezależnie dla
każdego z kanałów obrazu wielospektralnego, a za synchronizację pracy filtru i kamery
odpowiada dedykowane oprogramowanie sterujące. Wynik akwizycji przechowywany jest w
bazie danych, przy czym możliwy jest zapis w trybie ciągłym, tj. w postaci sekwencji
kolejnych klatek wielospektralnych lub w trybie pojedynczego zdjęcia.
Rys. 2 Prototyp urządzenia
Rys. 1 Schemat opracowanego urządzenia
W zastosowanym rozwiązaniu sprzętowym wybrano ciekłokrystaliczny filtr firmy VariSpec
oraz kamerę Andor Luca. Pozwoliło to na uzyskanie rozdzielczości przestrzennej VGA,
natomiast rozdzielczości spektralnej zawierającej 21 niepokrywających się ze sobą kanałów
ze skalą 16 bitową z zakresu światła widzialnego.
Podgląd fotografowanego obiektu możliwy jest poprzez drugi okular lampy szczelinowej lub
z wykorzystaniem oprogramowania sterującego, Oprogramowanie pozwala na bieżąco śledzić
wybrany kanał spektralny w postaci obrazu monochromatycznego, z dodatkowo
zdefiniowanym przekształceniem punktowym lub kontekstowym, a także odtwarza obraz
kolorowy. Ze względu na fakt, że w zależności od długości fali zarówno szerokość okna
przepuszczalności jak i tłumienie filtra w oknie ulegają zmianie co wymaga odpowiedniej
korekcji amplitudowej, do kalibracji urządzenia tj. wyznaczenia globalnej transformacji z
przestrzeni spektralnej urządzenia do przestrzeni RGB zastosowano klasyfikację
nadzorowaną z numerycznym atrybutem klasowym. Przyjęto model liniowy, a do
wyznaczenia liniowych kombinacji RGB wybrano klasyczną regresję liniową z metodą
najmniejszych kwadratów. Zbiór treningowy przygotowano na bazie zdjęć próbnika kolorów
X-Rite Colorchecker Classic dla którego znane są widma i barwy wzorcowe.
Na obecnym etapie dodatkowa diagnoza możliwa jest na bazie analizy uzyskanych kanałów
spektralnych oraz uśrednionego widma dla zadanych podregionów obrazu.
218
XXI Sympozjum PTZE, Lubliniec 2011
Komputerowe wspomaganie diagnostyki
Planowana jest dalsza rozbudowa systemu komputerowego wspomagania diagnostyki oka z
wykorzystaniem obrazowania wielospektralnego. Przeprowadzona zostanie dodatkowa
wizualizacja w postaci obrazu barwnego w oparciu o metody redukcji wymiarowości
przestrzeni spektralnej: analizę składowych głównych w wersji liniowej i jądrowej oraz
wielowymiarowe skalowanie na bazie rozmaitości matematycznych. Obrazy poddane zostaną
procesowi segmentacji w oparciu o nienadzorowane grupowanie sygnatur spektralnych.
Przewidziana jest również próba opracowania metod automatycznej detekcji zadanych
struktur anatomicznych i jednostek chorobowych. Do tego celu planowane jest zastosowanie
technik nadzorowanego uczenia maszynowego dla sygnatur spektralnych oraz porównań
sygnatur z widmami wzorcowymi. Aby porównania były możliwe niezbędna będzie
kalibracja, przy czym tym razem wykonywana ona będzie pomiędzy spektralnymi
przestrzeniami urządzenia oraz widm wzorcowych.
Literatura
[1] Gat N.: Imaging spectroscopy using tunable filters: a review., Proc SPIE-Internatiinal Soc Opt Eng. 2000
[2] Witten I., Frank E.: Data Mining: Practical Machine Learning Tools and Techniques, Morgan Kaufmann,
2005
[3] Świtoński A., Michalak M., Josiński H., Wojciechowski K.: Detection of Tumor Tissue Based on the
Multispectral Imaging, in Computer Vision and Graphics, Lecture Notes in Computer Science, Part 2, p.
325-333, Springer 2010.
[4] Stąpor K., Świtoński A., Automatic analysis of fundus eye images using mathematical morphology and
neural networks for supporting glaucoma diagnosis. Machine Vision and Graphics, 2004
219
XXI Sympozjum PTZE, Lubliniec 2011
IDENTYFIKACJA OSOBY
NA PODSTAWIE KINEMATYKI JEJ CHODU
Adam Świtoński1, Romualda Mucha2, Dariusz Danowski3, Grzegorz Cieślar2,
Andrzej Polański1, Konrad Wojciechowski1, Aleksander Sieroń2
1
Polsko-Japońska Wyższa Szkoła Technik Komputerowych
2
Śląski Uniwersytet Medyczny,
Katedra i Klinika Chorób Wewnętrznych, Angiologii i Medycyny Fizykalnej,
3
Zespół Sanatoryjno-Szpitalny Rehabilitacji Narządu Ruchu, Goczałkowice Zdrój
W potocznej opinii obecny jest pogląd, że człowiek jest w stanie rozpoznać znaną osobę jedynie na podstawie jej
ruchu w szczególności chodu. W pracy podjęto próbę weryfikacji tego poglądu a w szczególności zbadania jakie
cechy kinematyki ruchu człowieka są najbardziej istotne dla jego rozpoznania. Rozwiązanie tak postawionego
problemu było możliwe dzięki dostępności do zaawansowanego technicznie systemu pomiaru ruchu jakim jest
Laboratorium Pomiaru Ruchu (HML) http://hm.pjwstk.pl Polsko-Japońskiej Wyższej Szkoły Technik
Komputerowych wyposażone w system Motion Capture firmy VICON.
W celu przeprowadzenia eksperymentu wyselekcjonowano grupę 25 mężczyzn w wieku
20-35 lat, dla których dokonano akwizycji kinematyki chodu. Chód odbywał się wzdłuż
odcinka prostego o długości 4-5m, w zależności od długości kroku aktora. Zgromadzona w
ten sposób baza danych zawierała 353 instancje z opisem chodu, co daje w przybliżeniu 15
pomiarów dla jednego aktora. Dane źródłowe z systemu Motion Capture zapisywane były
w formacie ASF/AMC z pełnym szkieletem i rotacjami opisanymi za pomocą kątów Eulera.
Model szkieletowy składa się z 22 segmentów a rotacja każdego z nich reprezentowana jest
za pomocą trzech kątów Eulera. Wliczając dodatkowe trzy kąty do opisu globalnej rotacji
oraz trzy wartości reprezentujące translację układu globalnego otrzymujemy opis pojedynczej
pozy w przestrzeni 72 wymiarowej. Czas każdego przejścia wahał się w granicach od 2 do 5
sekund w zależności od tempa chodu, co przy akwizycji z częstotliwością 100Hz daje
sekwencje od 500 do 1000 klatek.
W ramach przetwarzania wstępnego opracowano metodę wykrywania pełnego podwójnego
kroku chodu zawierającego sekwencję dwóch kolejnych kroków wykonanych lewą i prawą
nogą. Metoda bazuje na śledzeniu odległości pomiędzy stopami i wykrywaniu maksimów.
Dodatkowo, aby podwójny krok zaczynał się od ruchu tej samej nogi wyznaczane są
odległości obydwu stóp od punktu początkowego i końcowego. Zarejestrowane dane
kinematyczne były standaryzowane do tej samej długości kroku. Przetwarzanie wstępne
obejmowało również estymację prędkości i przyspieszeń kątowych. W zrealizowanych
badaniach stosowano w tym celu najprostszy schemat różnicowy.
Do wyznaczania cech chodu, dla trajektorii każdego z katów definiujących wzajemne
orientacje kości szkieletu przeprowadzono ekstrakcję cech. Zastosowano następujące
podejścia: i)statystyczne, ii)oparte na transformacie Fouriera, iii)wykorzystujące fragmenty
trajektorii. W podejściu statystycznym wyznaczano dla każdego kąta wartość średnią i
wariancję kąta czyli dwa pierwsze momenty lub estymowano funkcję gęstości
prawdopodobieństwa dla kąta w postaci histogramu. W przypadku histogramu wybierano
zakres wartości kąta oraz krok dyskretyzacji. W podejściu z wykorzystaniem transformaty
Fouriera wyznaczano dla każdego kąta określoną liczbę składowych Fouriera o najniższych
częstotliwościach. W podejściu wykorzystującym fragmenty trajektorii, każdy fragment
220
XXI Sympozjum PTZE, Lubliniec 2011
zawierał informacje o wartościach kątów w określonych chwilach czasu, wyznaczonych przez
procentowy podział całego chodu na zadaną liczbę równych okresów. Podsumowując, liczby
cech wyznaczonych dla każdego przejścia były różne. I tak dla podejścia statystycznego z
średnią i wariancją otrzymano 138 cech, przy wyznaczaniu histogramów z kwantyzacją na 20
przedziałów liczba cech to 1380, natomiast przy zastosowaniu transformaty Fouriera z
jedynie 20 składowymi o najniższych częstotliwościach liczba cech wzrasta do 2760.
Uwzględniając dodatkowo prędkości i przyspieszenia kątowe liczba cech wzrasta trzykrotnie
i wynosi odpowiednio 414, 4140 i 8260.
W celu ograniczenia liczby cech wejściowych i wyselekcjonowania najbardziej
informatywnych z punktu widzenia identyfikacji postaci przeprowadzono selekcję cech. Dla
pełnych zestawów cech, zastosowanie technik przeszukiwania wyczerpującego, czyli ocena
wszystkich możliwych kombinacji jest niemożliwa ze względu na złożoność obliczeniową.
Nawet dla najmniejszego zbioru cech wejściowych przykładowo przy podejściu
statystycznym z średnią i wariancją oraz bez uwzględnienia prędkości i przyspieszeń
kątowych liczba kombinacji, którą należałoby zbadać to 3,48449E+41. Z tego względu
selekcję cech przeprowadzono w oparciu o ranking, w którym ocena poszczególnych cech
bazowała na wynikach testu chi kwadrat mierzącego stopień zależności pomiędzy cechą a
atrybutem klasowym oraz wyznaczany na bazie entropii. Zastosowano również bardziej
zaawansowaną selekcję cech polegającą na ocenie podzbiorów cech zamiast pojedynczej
cechy i zrealizowaną z wykorzystaniem metod przeszukiwania wspinaczkowego oraz
algorytmów genetycznych. Do oceny podzbioru cech w tym podejściu realizowano
klasyfikację lub wyznaczano korelację pomiędzy cechami podzbioru i atrybutem klasowym.
W selekcji cech wykorzystano nadzorowane techniki uczenia maszynowego, to jest zakładano
znajomość atrybutu klasowego. Z tego względu wyróżniono dwie strategie – "jeden przeciw
wszystkim" oraz "wszyscy przeciw wszystkim". W pierwszej selekcja cech odbywała się
niezależnie dla każdej z identyfikowanych osób, w wyniku czego otrzymywano podzbiory
cech w największym stopniu różnicujące kolejne osoby względem wszystkich pozostałych.
Natomiast przy drugim podejściu podzbiór był wspólny i odzwierciedlał on cechy najbardziej
różnicujące chód w ramach badanej populacji.
Na bazie tak przygotowanych zbiorów cech przeprowadzono klasyfikację. Do tego celu
w fazie wstępnej wybrano klasyfikator k najbliższych sąsiadów, naiwny klasyfikator Bayesa
z rozkładem normalnym i estymatorem jądrowym. Dla najbardziej obiecujących kombinacji
cech wejściowych przeprowadzono dodatkowa klasyfikację z wykorzystaniem funkcyjnego
klasyfikatora typu wielowarstwowy perceptron charakteryzującego się znacznie większą
złożonością obliczeniową. Do oceny otrzymanych wyników klasyfikacji wyznaczano
sprawność klasyfikatora, to jest procent poprawnie zidentyfikowanych przejść. Podział zbioru
zestawów cech na część testową i uczącą przeprowadzono z wykorzystaniem metody walidacji
krzyżowej.
Dla zgromadzonej bazy danych przejść udało się uzyskać 100% sprawność klasyfikacji.
Przeprowadzano selekcja cech wykazała, że uzyskanie wysokiej sprawności klasyfikacji
wymaga śledzenia kinematyki ruchu wielu stawów, ograniczenie obserwacji do jednego lub
kilku znacznie pogarsza jej skuteczność. W dalszych badaniach planuje się zastąpienie
reprezentacji orientacji pomiędzy stawami opartej na kątach Eulera przez reprezentację
wykorzystującą kwaterniony.
221
XXI Sympozjum PTZE, Lubliniec 2011
Literatura
[1] Witten I., Frank E.: Data Mining: Practical Machine Learning Tools and Techniques, Morgan Kaufmann,
2005
[2] Zonghua Zhang,Nikolaus F Troje:, View-independent person identification from human gait,
Neurocomputing 69, 2005
[3] Muller M., Roder T.: 00 A Relational Approach to Content-based Analysis of Motion Capture Data. Vol.
36 of Computational Imaging and Vision, ch. 20, 477-506, 2007.
[4] Poppe R.: Vision-based human motion analysis: An overview, Computer Vision and Understanding, 2007
222
XXI Sympozjum PTZE, Lubliniec 2011
OCENA WŁASNOŚCI ELEKTROCHEMICZNYCH
ZMODYFIKOWANEGO POWIERZCHNIOWO STOPU
TI-6AL-4V ELI
Janusz Szewczenko, Magdalena Pochrząst, Witold Walke
Politechnika Śląska, Instytut Materiałów Inżynierskich i Biomedycznych,
Gliwice
Wstęp
Jakość finalna implantów ze stopów tytanowych zależy od składu chemicznego, jakości
metalurgicznej, rodzaju struktury i umocnienia struktury podłoża oraz struktury, rodzaju
i grubości warstwy powierzchniowej. Warstwa powierzchniowa kształtowana jest poprzez
zastosowanie różnych technologii inżynierii powierzchni. Obróbkę powierzchniową stopów
warunkują możliwości technologiczne producenta i wiedza z zakresu uwarunkowań
biomechanicznych, a także znajomość reaktywności implantu w trakcie zabiegu
implantowania i użytkowania wyrobu. Istotne są też kryteria ekonomiczne przemysłowe
i kliniczne kształtowania i stosowania danego wyrobu. Możliwe jest wytwarzanie warstw
o bardzo dobrej adhezji do podłoża, odpornych na ścieranie, zabezpieczających metal przed
rozwojem procesów korozyjnych czy też warstw aktywnych biologicznie. Stosowane obecnie
metody modyfikacji powierzchni nie zawsze gwarantują otrzymanie wymaganej odporności
na korozję, a w konsekwencji biokompatybilności w odniesieniu do środowiska tkankowego
wytwarzanych powłok.
W pracy wykorzystano metodę potencjodynamiczną i impedancyjną do określenia własności
elektrochemicznych zmodyfikowanego powierzchniowo stopu Ti-6Al-4V ELI. Zastosowanie
tych metod pozwoliło na charakterystykę odporności korozyjnej stopu o zmodyfikowanej
powierzchni, a także zweryfikowano przydatność stosowanych w tym celu metod.
Materiał i metody
W badaniach wykorzystano stop Ti-6Al-4V ELI, w postaci prętów o średnicy d = 14 mm.
Skład chemiczny badanego stopu spełniał wymagania zawarte w normie ISO 5832-3:2007.
Modyfikacja powierzchni próbek została przeprowadzona za pomocą zabiegów, którym
przyporządkowano następujące oznaczenia: 1 - szlifowanie, 3 - polerowanie mechaniczne, 4 –
piaskowanie, 5 – polerowanie elektrolityczne, XV – anodyzację (X oznacza wartość
potencjału, przy którym przeprowadzano proces). Ponadto część próbek poddano zabiegowi
sterylizacji parowej – S. Szlifowanie mechaniczne prowadzono kolejno na wodnych
papierach ściernych o gradacji 120÷600 ziarn/mm2. Polerowanie mechaniczne
przeprowadzono na szlifierce ręcznej z wykorzystaniem szczotek sizalowych i pasty
polerskiej. Następnie wybłyszczano na tarczach płóciennych do uzyskania i lustrzanej
powierzchni, Piaskowanie przeprowadzono w iniekcyjnej kabinie śrutowniczej,
wykorzystując jako medium robocze kulki szklane. Polerowanie elektrolityczne prowadzono
w kąpieli na bazie kwasu chromowego (E-395 Firmy POLIGRAT Gmbh). Proces anodyzacji,
223
XXI Sympozjum PTZE, Lubliniec 2011
prowadzony był z użyciem elektrolitu na bazie kwasów fosforowego i siarkowego (Titan
Color Firmy POLIGRAT GmbH) przy potencjałach 57V, 77V, 87V oraz 97V. Sterylizację
parową przeprowadzono w autoklawie Basic Plus firmy Mocom, w temperaturze 134oC,
ciśnieniu 2,1 bar przez 12 minut.
Odporność na korozję elektrochemiczną oceniano w oparciu o rejestrację krzywych
polaryzacji anodowej. W badaniach potencjodynamicznych zastosowano system do badań
VoltaLab®PGP201 firmy Radiometer. Elektrodą odniesienia była nasycona elektroda
kalomelowa (NEK) typu KP-113, natomiast elektrodą pomocniczą - elektroda platynowa typu
PtP−201. Na podstawie zarejestrowanych krzywych polaryzacji anodowej wyznaczono
charakterystyczne wielkości opisujące odporność na korozję elektrochemiczną, tj.: potencjał
korozyjny, opór polaryzacji, potencjał przebicia lub potencjał transpasywacji. Dla
wyznaczenia wartości oporu polaryzacji zastosowano metodę Sterna. Badania
przeprowadzono w roztworze Ringera, firmy B. Braun Melsungen AG w temperaturze 37 ±
1 C. W celu uzyskania informacji o własnościach fizykochemicznych powierzchni próbek ze
stopu Ti-6Al-4V ELI przeprowadzono dodatkowo badania z wykorzystaniem
elektrochemicznej spektroskopii impedancyjnej (EIS). Pomiary przeprowadzono
z wykorzystaniem systemu pomiarowego AutoLab PGSTAT 302N wyposażonego w moduł
FRA2 (Frequency Response Analyser). Zastosowany układ pomiarowy umożliwił
prowadzenie badań w zakresie częstotliwości 104 ÷ 10-3Hz. W badaniach wyznaczono
impedancyjne widma układu i dopasowano uzyskane dane pomiarowe do układu zastępczego.
Dobór tej metody umożliwił scharakteryzowanie impedancji granicy faz: stop Ti-6Al-4VELI
– warstwa powierzchniowa – roztwór Ringera na drodze aproksymacji danych
impedancyjnych za pomocą modelu elektrycznego obwodu zastępczego.
Wyniki
Przeprowadzone badania potencjodynamiczne wykazały korzystny wpływ procesu anodyzacji
powierzchni na odporność na korozję wżerową stopu Ti-6Al-4V ELI zarówno bezpośrednio
po obróbce mechanicznej, jaki i po polerowaniu elektrochemicznym. Wyznaczone krzywe
polaryzacji anodowej dla wszystkich wariantów obróbki powierzchniowej charakteryzowały
się brakiem występowania pętli histerezy w zakresie pomiarowym do E = +4000 mV, co jest
zjawiskiem korzystnym. Uzyskane wyniki charakterystycznych wielkości opisujących
odporność na korozję wżerową jednoznacznie wykazały zasadność stosowania
poszczególnych zabiegów modyfikujących własności powierzchni stopu Ti-6Al-4V ELI.
Przeprowadzona dodatkowo analiza impedancyjna wykazała, że w przypadku próbek
anodyzowanych, po procesie polerowania elektrochemicznego, przy potencjale o wartości E =
+57V oraz E = +97V występuje pojedyncza szczelna warstwa pasywana (tlenkowa)
skutecznie zabezpieczająca stop przed oddziaływaniem środowiska korozyjnego. Z kolei na
powierzchni próbek anodyzowanych przy potencjale E = +77V oraz E = +87V oprócz
szczelnej warstwy pasywnej zaobserwowano również występowanie dodatkowej warstwy
porowatej o dużym rozwinięciu powierzchni. Pominięcie procesu polerowania
elektrochemicznego stopu Ti-6Al-4V ELI spowodowało pojawienie się w układzie
zastępczym impedancji Wartburga (W) sugerującej możliwość inicjacji procesów
korozyjnych w wyniku dyfuzji reagentów. Jest to zjawisko niekorzystne. Uzyskane wyniki
jednoznacznie wskazują, iż uzasadnionym jest zastosowanie polerowania elektrochemicznego
jako obróbki ostatecznej przed procesem anodyzacji. W badaniach wykazano również, że
proces sterylizacji parą wodną pod ciśnieniem nie spowodował obniżenia odporności
korozyjnej dla poszczególnych wariantów obróbki powierzchniowej.
224
XXI Sympozjum PTZE, Lubliniec 2011
WPŁYW SZCZELINY POWIETRZNEJ WOKÓŁ MAGNESU
STAŁEGO NA PRACĘ KONCENTRATORA STRUMIENIA
NABIEGUNNIKA W WIRNIKU SILNIKA
SYNCHRONICZNEGO Z MAGNESAMI STAŁYMI
Z WEWNĘTRZNYM OBWODEM MAGNETYCZNYM
Krzysztof Szewczyk, Rafał Golisz, Tomasz Walasek, Zygmunt Kucharczyk
Politechnika Częstochowska
W silniku z magnesami stałymi z wewnętrznym obwodem magnetycznym magnesy
umieszczone są wewnątrz wirnika. Tego rodzaju konstrukcja daje doskonałe właściwości
mechaniczne wirnika. Przykładową konstrukcję takiego silnika przedstawiono na rys. 1.
W celu zmniejszenia kąta opasania nabiegunnika wirnika zastosowano koncentrator
magnetyczny, którego zadaniem jest zagęszczenie strumienia pochodzącego od magnesu stałego.
M
K
K
M
MK
M
K
Rys.1 Silnik z magnesami stałymi
Gęstość strumienia magnesu stałego wynika z jego właściwości. Daje to ograniczenie na
generowany moment obrotowy. Zastosowanie koncentratora pozwala na zawężenie przekroju
przez który przepływa strumień. Jeżeli na koncentrator użyje się materiału o większym niż w
pozostałym wirniku poziomie nasycenia, można się spodziewać zwiększonej gęstości
strumienia, a co za tym idzie, większych sił oraz momentów.
Ze względu na to, że cały magnes otoczony jest przez ferromagnetyk, zróżnicowany jedynie
właściwościami , strumień może podążać w niepożądanym kierunku. Pogarsza to właściwości
wirnika. Aby tego uniknąć należało by ograniczyć strumień strat. Można tego dokonać
poprzez powiększenie reluktancji w obwodzie magnetycznym przez który płynie strumień
strat. Na rys. 2 przedstawiono propozycję rozwiązania. Pionowa ciemna strzałka oznacza
kierunek polaryzacji magnesu M, a strzałka jasna wskazuje szczelinę powietrzną
ograniczającą drogę strumienia.
225
XXI Sympozjum PTZE, Lubliniec 2011
Rys.2. Umiejscowienie szczeliny powietrznej
W artykule przedstawiono wyniki symulacji tego rodzaju silnika . Wyliczono moment
statyczny wirnika silnika dla układu z oraz bez szczeliny powietrznej.
30
20
10
0
-30 -26 -22 -18 -14 -10 -6 -2
2
6 10 14 18 22 26 30
Silnik bez szczeliny
powietrznej
Silnik ze szczeliną przy
magnesach
-10
-20
-30
-40
Rys.3. Porównanie momentu obrotowego dla silnika z koncentratorem strumienia z oraz bez szczeliny
powietrznej w obszarze wokół magnesu stałego nabiegunnika wirnika.
Wyliczeń dokonano w oparciu o metodę elementów skończonych (Finite Elements Method ).
Wykorzystano programy FEMM 3.4 oraz FLUX 2d V10.1.
W artykule przedstawiono również wyniki wyliczeń momentu zaczepowego dla powyższych
konstrukcji, którego wpływ widać na wykresie z rys. 3.
Analiza tego typu obwodu magnetycznego pozwala na znaczne zwiększenie momentu
obrotowego. Zwiększenie momentu zaczepowego w tego rodzaju silniku może mieć również
praktyczne znaczenie w układach samohamownych serwomechanizmów. Zatrzymanie silnika
z użyciem dużego momentu hamującego pochodzącego od siły zaczepowej pozwoli na
oszczędzanie energii w czasie regulacji położenia obiektu sterowanego serwomotorem.
226
XXI Sympozjum PTZE, Lubliniec 2011
NOWOCZESNE METODY IDENTYFIKACJI LOKALIZACJI
LUDZI W PODZIEMNYCH WYROBISKACH
KOPALNIANYCH ORAZ W JASKINIACH I TUNELACH
KOMUNIKACYJNYCH
Zygmunt Szymański
Politechnika Śląska, Gliwice
W referacie przedstawiono opis typowych konfiguracji podziemnych wyrobisk kopalnianych,
tuneli komunikacyjnych oraz jaskiń, eksploatowanych i eksplorowanych dla celów
przemysłowych, transportowych, i komunikacyjnych. Podczas eksploatacji pomieszczeń
znajdujących sie pod ziemią mogą się pojawić różne sytuacje awaryjne (zawały, obrywy,
wstrząsy górotworu), związane z uszkodzeniem maszyn górniczych, maszyn transportowych
oraz wypadki komunikacyjne, lub inne niebezpieczne zdarzenia powodujące zawał,
uszkodzenie lub zasypanie całości lub części wyrobiska. Podstawowym zadaniem służb
technicznych i służb ratowniczych jest lokalizacja położenia ludzi przebywających w tym
wyrobisku, oraz nawiązanie z nimi kontaktu. Ułatwia to podjęcie decyzji o sposobie
prowadzenia akcji ratowniczej oraz określenie sił i środków potrzebnych do jej skutecznej
realizacji. W referacie przedstawiono przegląd metod oraz spektrum układów oraz urządzeń
wykorzystywanych aktualnie do lokalizacji osób przebywających w podziemnych tunelach.
W referacie zamieszczono także nowoczesne metody identyfikacji, aparaturę pomiarową, oraz
opracowane przy współudziale Autora nowoczesne układy lokalizacji i transmisji sygnałów z
podziemiach wyrobisk kopalnianych. W referacie zamieszczono wybrane modele
matematyczne, fizyczne oraz symulacyjne różnych wariantów podziemnych wyrobisk:
chodniki w kopalniach, tunele kolei podziemnej, jaskinie. Dla wybranych modeli fizycznych
analizowanych obiektów, przeprowadzono obliczenia rozkładu pól elektromagnetycznych w
tych wyrobiskach, dla najczęściej występujących stanów awaryjnych: zawał, zasypanie
chodnika, zgubienie się w jaskini. Osoba przebywająca w tunelu powinna być wyposażona w
specjalny mikro chip (mikro nadajnik), który będzie źródłem sygnału wykrywanego przez
anteny urządzenia lokalizacyjnego. W referacie zamieszczono przykładowe wyniki obliczeń
rozkładów pola magnetycznego i elektrycznego, przeprowadzone dla wybranych warunków
eksploatacyjnych. W referacie przedstawiono krótki opis urządzeń (Wajl 7, oraz Aszym)
opracowane przez Autora referatu, i sprawdzone w warunkach przemysłowych,
zapewniających skuteczną lokalizację ludzi w podziemnych pomieszczeniach. Opracowane
układy były sprawdzane w różnych warunkach terenowych i spełniały skutecznie swoje
zadania. W referacie zamieszczono także przykładowe opisy badań przemysłowych układów
prototypowych.
227
XXI Sympozjum PTZE, Lubliniec 2011
DAMAGES OF ELECTRIC POWER FACILITIES CAUSED
BY THE 2011 EASTERN JAPAN GREAT EARTHQUAKE
AND TSUNAMI
- A BRIEF SURVEY Mitsuhiko Toho
Polish-Japanese Institute of Information Technology
Warsaw
1. The 2001 Eastern Japan Great Earthquake and Tsunami
The Eastern Japan Great Earthquake Disaster was caused by a 9.0-magnitude undersea
megathrust earthquake off the coast of Japan that occurred at 14:46 JST (05:46 UTC) on
Friday, 11 March 2011. The epicenter was approximately 72 km east of the Oshika Peninsula
of Tohoku, with the hypocenter at an underwater depth of approximately 32 km. The energy
released by the earthquake 1.9±0.5×1017 joules was the biggest in the history of Japan.
The earthquake which was caused by 8 meters upthrust on 180-kilometer wide seabed at 60
kilometers offshore from the east coast of Tohoku resulted in a major tsunami which
destructed the Pacific coastline and resulted in the loss of thousands of lives and devastated
entire towns. The tsunami propagated across the Pacific, and warnings were issued and
evacuations carried out in many countries bordering the Pacific, including the entire Pacific
coast of North and South America from Alaska to Chile. An estimated wave height of tsunami
reached 38 m at Miyako, Iwate.
Fig.2. Fukushima I Nuclear Plant, March
12, 2011 (Photo: [2])
Fig.1. Map of the 2011 Eastern Japan Great Earthquake
and aftershocks. [1]
228
XXI Sympozjum PTZE, Lubliniec 2011
Officially confirmed numbers of casualties by the Japan’s National Police Agency was 12,175
deaths and 15,489 people missing across eighteen prefectures (April 4, 2011). These numbers
are expected to increase. Around 190,000 buildings were destroyed or damaged by the quake
and tsunami. Of those, 45,700 were destroyed. The damaged buildings included 29,500 in
Miyagi, 12,500 in Iwate and 2,400 in Fukushima.
2. Damaged facilities of power supply
Facilities of electric power supply also were damaged in big scale. The most serious object is
Fukushima Daiichi Nuclear Power Station of Tokyo Electric Power Company – TEPCO.
Although all nuclear plants in Tohoku and Kanto regions stopped to run automatically
immediate after the earthquake, tsunami hit
Fukushima Daiichi and Daini NPS with
waves of 14m height. After 3 weeks from the
earthquake Fukushima Daiichi is still in
critical situation.
Fig.3. Damaged power line in Soma, Fukushima,
moved 3 km by tsunami from the Pacific coast
(Photo: http://twitpic.com/4ajhml)
Beside 2 nuclear plants in Fukushima another
2 nuclear plants in Iwate, 22 generators of 12
thermal plants, 4 generators of 3 geothermal
plants and 22 water power stations went
offline after the earthquake in the area served
by TEPCO and Tohoku Power Electric (TEP).
It reduced TEPCO's total capacity by 21 GW.
A lot of power lines and 9 transformation
stations also damaged seriously. As a result
more than 4 million households in Kanto area
(TEPCO) were cut electricity. In the case of TEP blackouts came up to 4.4 million households
in northeastern Japan. Rolling blackouts of TEPCO began on 14 March.
(W
3. Recovery
All water power stations were recovered in 2
days after the earthquake. Thermal plants are
under reconstructions. The Japanese government
as well as TEPCO announced an abolishment of
both Fukushima I and II NPS. Rolling blackouts
and voluntary reduced electricity use by
consumers in the Kanto and Tohoku area helped
reduce the predicted frequency and duration of
the blackouts. It is too early to make recovery
plan of electricity supply.
References
[1] 2011年東北地方太平洋沖地震の被害・影響(The aftermath of the 2011 Tohoku earthquake and tsunami),
Wikipedia
[2] ―2010 TEPCO Illustrated‖, TEPCO, Tokyo 2011
229
XXI Sympozjum PTZE, Lubliniec 2011
MODEL OBWODOWY DWUUZWOJENIOWEGO SILNIKA
VCM DLA SYSTEMÓW POZYCJONOWANIA GŁOWIC
DYSKÓW TWARDYCH
Tomasz Trawiński, Krzysztof Kluszczyński
Politechnika Śląska, Wydział Elektryczny,
Katedra Mechatroniki
Podstawowe źródło momentu napędowego współczesnych systemów pozycjonowania głowic
dysków twardych stanowią silniki łukowe prądu stałego wzbudzone magnesami trwałymi,
czyli tzw. silniki VCM (z ang. Voice Coil Motor). Obserwowany ostatnio bardzo intensywny
wzrost gęstości powierzchniowych danych [1], w laboratoriach sięgających już 2 Tb/in2 (a
spodziewa się znacznie większych wartości gęstości powierzchniowych), wymaga ciągłego
ulepszania konstrukcji silników już powszechnie stosowanych oraz wprowadzania napędu
dodatkowego (pomocniczego, wykonanego przykładowo z wykorzystaniem silników
piezoelektrycznych). Proponowano wiele różnych konstrukcji silników VCM ze
zmodyfikowanymi uzwojeniami obwodu twornika [2-4], mającymi na celu zwiększenie stałej
przyśpieszeniowej, ograniczających siły działające ma łożyska E-bloku itp. Patrząc na fazy
pracy współczesnego systemu pozycjonowania: faza wyszukiwania, faza umiejscawiania i
faza śledzenia można dojść do wniosku, że w zależności od fazy pracy, w jakiej aktualnie się
znajduje silnik VCM musi sprostać całkowicie różnym wymaganiom. W fazie wyszukiwania
wymagana jest duża stała przyśpieszeniowa – ponieważ chodzi o jak najszybsze dojście do
zadanej pozycji kątowej (w okolice zadanej ścieżki), zaś w fazie śledzenia wymagana jest
duża precyzja (rozdzielczość) i zdolność eliminacji zakłóceń o dużych częstotliwościach.
Spełnienie tych wymagań w jednotwornikowych (jednouzwojeniowych) silnikach VCM jest
trudne i w praktyce silniki te wspomagane są (w rozwiązaniach współczesnych) przez silniki
pomocnicze (silniki piezoelektryczne). Interesujące własności może mieć tutaj silnik
dwuuzwojeniowy (dwutwornikowych), o dwóch uzwojeniach o zbliżonych parametrach
elektrycznych, które zasilane mogą być z dwóch różnych źródeł – np. napięciowego z falą
MSI oraz z napięciowego z sygnałem ciągłym.
Przykładowe zdjęcie obwodu twornika nowoczesnego silnika VCM przedstawiono na rys.1a).
natomiast na rys.1b) przedstawiono sposób namagnesowania jednego z magnesów trwałych.
a)
b)
Rys. 4. Obwód twornika (uzwojenie w charakterystycznym kształcie, przypominającym trapez) – a), sposób
namagnesowania magnesów trwałych stojana – b)
230
XXI Sympozjum PTZE, Lubliniec 2011
Strukturę blokową pomocną przy formułowaniu modelu matematycznego dwutwornikowego
silnika VCM przedstawiono na rys.2. Na tym rysunku zaznaczono wzajemne sprzężenia
pomiędzy układami elektromagnetycznymi tworników a układem mechanicznym, do których
należy zaliczyć sprzężenia w postaci: momentów elektromagnetycznych (Te1 i Te2),
przemieszczeń kątowych (), prędkości (r) i sprzężenia elektromagnetycznego pomiędzy
twornikami (Lm).
u1(t)
u2(t)
Lm
Twornik 1
r
Te1
Twornik 2
Te2
Układ mechaniczny
Rys. 5. Schemat blokowy przedstawiający sprzężenia wewnętrzne w dwutwornikowym silniku VCM
W niniejszym artykule przedstawiony zostanie sposób formułowania modelu
matematycznego silnika. Analizie zostaną poddane podstawowe własności silnika przy
współpracy z układem mechanicznym reprezentowanym przez zespół mas
bezwładnościowych połączonych sprężyście [5– 7] .
Literatura
[3] Trawiński T.: Gęstości powierzchniowe danych i dodatkowe napędy piezoelektryczne w systemach
pozycjonowania głowic dysków twardych, Biuletyn PTZE, 2011.
[4] Kuwajima H., i inni: Development of balanced-type high shock suspension for 0.85-in hard disk drive, IEEE
Transaction on Magnetics, vol. 42, no. 2, p. 255-260, February 2006,.
[5] Heang-Soo Lee, i inni: VCM design to improve dynamic performance of an actuator in disk drive, IEEE
Trans. On Mag., vol. 41., no. 2, p. 774-778, 2005,
[6] Lin H., Li Q., He Z., Chen S.: Development of a single coil coupled force vcm actuator for high tpi
magnetic recording, IEEE Transactions on Magnetics, vol. 37, no. 2, p. 850-954, March 2001.
[7] Trawiński T., Wituła R.: Modeling of HDD head positioning systems regarded as robot manipulators using
block matrices, Robot Manipulators New Achievements, Aleksandar Lazinica and Hiroyuki Kawai (Ed.),
ISBN: 978-953-307-090-2, INTECH, 2010, p.129-144.
[8] Trawiński T.: Odwracanie macierzy o wybranych strukturach przy pomocy macierzy blokowych. Przegląd
Elektrotechniczny, ISSN 0033-2097, R. 85, NR 6/2009, s.98-101.
[9] Trawiński T., Kluszczyński K.: Modelowanie matematyczne dwuwarstwowego aktuatora głowic dysku
twardego jako manipulatora, Przegląd Elektrotechniczny, R.84, nr 6/2008, s.153-156.
Praca naukowa finansowana ze środków na naukę w latach 2009-2011 jako projekt badawczy N N510
355137
231
XXI Sympozjum PTZE, Lubliniec 2011
WPŁYW PRZEWODNOŚCI CIEPLNEJ GRUNTU NA
ROZKŁAD POLA TEMPERATURY W UKŁADACH
KABLOWYCH 110 kV
Janusz Tykocki
Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży
Redystrybucja energii elektrycznej coraz częściej wymaga zastosowania linii kablowych
wysokiego napięcia, układanych pod powierzchnią ziemi. Czynnikami wymuszającymi te
zmiany to urbanizacja i ochrona środowiska, przesyłanie energii w obrębie parków
narodowych i krajobrazowych, działów wodnych, terenów wojskowych, lotnisk, itp.
Ilość przesyłanej energii jest determinowana temperaturą rdzenia kabla. Główny wpływ na
rozkład pola temperatury w rdzeniu, pomijając temperaturę nad powierzchnią ziemi oraz jej
rozkład pod powierzchnią w zależności od głębokości położenia kabli, ich konstrukcji,
wzajemnego ułożenia w systemach trójfazowych jest przewodność cieplna gruntu, zależna od
rodzaj gruntu i jego wilgotność.
W artykule zostanie omówiony rozkład pola temperatury w kablach wysokonapięciowych
64/110kV: 2XS(FL) z żyłą miedzianą. W symulacji wykorzystano profesjonalny program
NISA/Heat Transfer wykorzystujący w obliczeniach metodę elementów skończonych (MES).
1. Konstrukcja kabli wysokonapięciowych
Kable z izolacją z polietylenu usieciowanego XLPE stosowane są od początku lat 60 tych dla
zakresu napięć średnich. Od 1971 roku powszechnie stosowane są kable z izolacją XLPE na
napięcie 123kV. Aktualnie z powodzeniem, wytwarzane są i oddawane do eksploatacji kable
na napięcie 500kV.
Przy pozostających w przybliżeniu stałych właściwościach elektrycznych i dielektrycznych
zwiększona odporność na wydzielaną energię cieplną, oznacza także większą dopuszczalną
obciążalność w trybie pracy ciągłej oraz w przypadku zwarcia.
Inne zalety, produkowanych obecnie kabli wysokonapięciowych to:
mniejszy współczynnik strat tan δ = 4x10–4
przenikalność dielektryczna względna εr = 2,4 (a dzięki temu niższa pojemność
robocza)
mniejsza masa
mniejszy promień gięcia
łatwa obsługa w trakcie układania
łatwy montaż akcesoriów
niewymagana konserwacja instalacji kablowej
2. Model numeryczny kabla
Dobór kabla elektroenergetycznego jak i inne parametry dokonano na podstawie technicznej
specyfikacji firmy – Tele-Fonika Kable S.A:
A2XS(FL)2Y2Y-GC-FR 1x2000RMS/210 64/110 (123)kV IEC 60840
232
XXI Sympozjum PTZE, Lubliniec 2011
Tabela 1.
Prąd w żyle głównej
[A]
940
Temperatura
powietrza
[0C]
35
Temperatura
ziemi
[0C]
20
Odległość od powierzchni
ziemi
[m]
8
Na Rys. 1 przedstawiono model numeryczny analizowanego układu, a poniżej na Rys. 2.
rozkład temperatury w układzie dla typowych warunków brzegowych [Tabela1] zakładając
przewodność cieplną ziemi λ=1[W /mK].
Rys. 2. Rozkład temperatury
(dla warunków brzegowych z Tab 1)
Rys.1. Model FEM
Widoczne są znaczne różnice temperatury
w rdzeniu kabla dla przewodności cieplnej ziemi
λz0,20,8[W /mK] rys. 4, dochodzące dla
założonych warunków brzegowych do 400C. Na
rys. 5. przedstawiono rozkład temp. w rdzeniu,
ekranie i powierzchni kabla na różnych
głębokościach. Rozkład temperatur dla różnych
głębokości stabilizuje się począwszy od 10m
a różnice temp. pomiędzy poszczególnymi jego
warstwami są stałe dla różnych głębokości.
Rys. 3. Rozkładu temperatury w kablu i w ziemi
Rys. 4. Zmiany temp. w rdzeniu kabla ziemi na
różnych głębokościach (1 do 8m), przy różnych
wartościach przewodności cieplnej (0,22 do 1,2).
Rys 5. Analiza rozkładu temp. w rdzeniu kabla dla
różnych głębokości (1-40m).
233
XXI Sympozjum PTZE, Lubliniec 2011
3. Wnioski
W wyniku przeprowadzonej symulacji komputerowej oraz analizy rozkładu temperatury
w układzie w zależności od jego odległości od powierzchni ziemi oraz przewodności
cieplnej ziemi pod wpływem różnych temperatur nad powierzchnią gruntu, należy stwierdzić:
znaczący wpływ na temperaturę rdzenia kabla ma przewodność cieplna ziemi - do
wartości 0,8[W /mK]
temperatura w rdzeniu kabla jest ustalona począwszy od głębokości 10m
różnice temperatur między rdzeniem kabla, jego ekranem a powierzchnią dla
określonych warunków brzegowych są stałe i wynoszą 60C i 20C, ustalają się po
przekroczeniu 10m
wpływ temperatur zewnętrznych na rozkład temperatury wewnątrz kabla stabilizuje
się poniżej 10m od powierzchni ziemi
234
XXI Sympozjum PTZE, Lubliniec 2011
VARIATIONS OF PERMANENT MAGNETS DIMENSIONS
IN AXIAL FLUX PERMANENT MAGNET SYNCHRONOUS
MACHINE
Peter Virtič
University of Maribor, Faculty of Energy Technology, Slovenia
Introduction
Since the permanent magnets (PMs) material price reduced significantly, the research
activities in the field of axial flux permanent magnet machines greatly increased. Axial flux
permanent magnet synchronous machines (AFPMSMs) became an attractive solution to
increase power densities of electrical machines. The electrical machines industry showed a
great interest for such improvement in order to achieve smaller machine weight and size or
higher power at the same machine size. Moreover, AFPMSMs can be built into the
applications where conventional machines cannot be built in due to the constraints in the axial
direction. By increasing the machine radius the advantage of AFPMSMs compared with
radial flux counterparts become more expressive, especially when using NdFeB PMs. On the
other hand, the PMs are the most expensive parts of electrical machines. Therefore, it is
convenient to study the influence of the amount of PMs on AFPMSM characteristics. In this
paper the impact of PMs dimensions on characteristics of AFPMSM with double external
rotor and coreless stator is presented (Fig. 1). These characteristics are calculated by using
analytical method via magnetic vector potential.
ds
dm
p
dm
ROTOR
STATOR
ROTOR
ro
t
m
t
ri
2t
dag
dFe
dag
dFe
Fig. 1. Topology of double sided coreless stator AFPMSM
Influence of permanent magnets dimensions on static characteristics of AFPMSM
The amount of PMs is determined by their dimensions such as thickness (dm), length (ro-ri)
and width (ηm). Fig. 2 presents electromotive force (EMF) according to displacement at
235
XXI Sympozjum PTZE, Lubliniec 2011
different inner radius (ri), while all other dimensions and parameters of the machine parts
remain constant. This causes the change in PM length but not in the outer radius of PM or in
outer machine radius. Static torque according to displacement and different inner radius of
PMs is presented in Fig. 3. Fig. 4 presents the dependency of static torque according to
rotational angle and PMs angle (ηm).
ri=10mm
ri=70mm
60 ri=110mm
ri=20mm
ri=80mm
ri=120mm
ri=40mm
ri=90mm
ri=130mm
ri=50mm
ri=100mm
ri=140mm
EMF (V)
40
20
0
-20
-40
-60
0
1
2
3
4
Displacement (rad)
5
6
7
Winding:
N=2x50
Swire=1,23mm2
wire=1,25mm
I=0A
ds=15mm
dt=20mm
t=30°
Permanent magnets:
Br=1,22T
m=25°
ro=150mm
dm=5mm
p=5
Rotational speed:
n=600rpm
Fig. 2. Electromotive force according to displacement and inner radius of PMs
ri=10mm
ri=70mm
30
ri=110mm
ri=40mm
ri=80mm
ri=120mm
ri=50mm
ri=90mm
ri=130mm
20
T (Nm)
10
0
-10
-20
-30
0
1
2
3
4
5
Displacement (rad)
ri=60mm
ri=100mm
ri=140mm Winding:
N=2x50
Swire=1,23mm2
wire=1,25mm
Jcu=5A/mm2
I=2x6,15A
ds=15mm
dt=20mm
t=30°
Permanent magnets:
Br=1,22T
m=25°
ro=150mm
dm=5mm
6
7
p=5
Fig. 3. Static torque according to displacement and inner radius of PMs
236
XXI Sympozjum PTZE, Lubliniec 2011
m60
=35°
m=30°
m=25°
m=20°
m=16°
20
T (Nm)
10
0
-10
-20
-30
0
1
2
3
4
5
Rotational angle (rad)
6
7
Winding:
N=2x50
Swire=1,23mm2
wire=1,25mm
Jcu=5A/mm2
I=2x6,15A
ds=15mm
dt=20mm
t=30°
Permanent magnets:
Br=1,22T
ri=80mm
ro=150mm
dm=5mm
p=5
Fig. 4. Static torque according to displacement and PM angle
The comparisons between electromotive force waveforms in Fig. 2 show the maximum
magnitude at inner radius of 40 mm. Fig 3. shows the maximum torque at inner radius of 10
mm, but it is also clearly shown that static torque magnitude at inner radius of 40 mm is
slightly lower than at 10 mm. Maximum static torque according to displacement and PM
angle increases asymptotically by increasing ηm. For this reason, it is more convenient and
cost effective to limit amount of PMs with dimensions which considerably contribute to better
static torque and EMF characteristics.
237
XXI Sympozjum PTZE, Lubliniec 2011
POMIARY EMISJI ELEKTROMAGNETYCZNEJ W.CZ.
W BUDYNKACH KAMPUSU POLITECHNIKI LUBELSKIEJ
Andrzej Wac-Włodarczyk, Paweł A. Mazurek, Angelika Błażejewska, Grzegorz Masłowski,
Tobiasz Parys, Katarzyna Przytuła, Łukasz Ziętek
Politechnika Lubelska,
Instytut Podstaw Elektrotechniki i Elektrotechnologii
Koło Naukowe ELMECOL
Rozwój przemysłu, w tym przede wszystkim rozwój telekomunikacji, powoduje wzrost
poziomów natężenia pola elektromagnetycznego w środowisku wywołany głównie emisją od
tzw. sztucznych źródeł. Najpowszechniej występującymi instalacjami będącymi źródłami pól
elektromagnetycznych, które mają istotny wpływ na ogólny poziom pól w środowisku, są
linie elektroenergetyczne i instalacje radiokomunikacyjne, takie jak stacje bazowe telefonii
komórkowej, stacje radiowe i telewizyjne oraz systemy radionamierzania.
Każde urządzenie elektryczne lub elektroniczne jest potencjalnym źródłem zaburzenia
elektromagnetycznego, które może propagować przewodowo lub promieniowo do
środowiska. Zaburzenia powodowane emisją pożądaną eliminuje się racjonalną gospodarką
widmem elektromagnetycznym – przez odpowiedni przydział częstotliwości lub pasm
roboczych. Natomiast zaburzenia wywołane emisją niepożądaną powinny mieć tak określone
poziomy, aby nie zakłócały pracy innych obiektów w miejscu ich zainstalowania.
W ostatnim czasie po wprowadzeniu i zastosowaniu technologii GSM dynamicznie
rozwijającą się gałęzią technologiczną są bezprzewodowe sieci lokalne WLAN.
Bezprzewodowa sieć lokalna (WLAN, Wireless Local Area Network) – to sieć lokalna, w
której połączenia między urządzeniami sieciowymi zrealizowano bez użycia przewodów.
Sieci tego typu wykonywane są najczęściej z wykorzystaniem mikrofal jako medium
przenoszącego sygnały, ale również z użyciem podczerwieni. Są one projektowane w oparciu
o standard IEEE 802.11. Do komunikacji za pomocą mikrofal wykorzystuje się pasmo 2,4
GHz (w standardzie 802.11b oraz 802.11g) lub też 5 GHz (w standardzie 802.11a). Pasmo 2,4
GHz podzielone jest na 14 kanałów w paśmie 2,4-2,5 GHz, które układają się co 5 MHz od
2412 do 2477 MHz. Każdy kanał ma swoją częstotliwość nośną, która jest modulowana przy
przesyłaniu informacji. Wspólną cechą wymienionych standardów jest to, że wykorzystują
one nielicencjonowane zakresy częstotliwości oraz używają technik rozpraszania widma
radiowego. Urządzenia działające w tych standardach nie podlegają koncesjonowaniu i mogą
być stosowane bez uzyskiwania pozwoleń. W świetle regulacji prawnych Unii Europejskiej,
radiowe urządzenia telekomunikacyjne powinny być zgodne z dyrektywami nowego
podejścia: Telekomunikacyjne urządzenia końcowe i urządzenia radiowe (RTTE),
Kompatybilność elektromagnetyczna (EMC), Niskonapięciowe wyroby elektryczne (LVD).
Technologia WiFi jest już standardem w biurach, na uczelniach, w zakładach przemysłowych
oraz w lokalizacjach publicznych (hotele, urzędy, wybrane ulice i place miejskie).
Dynamicznie rośnie liczba urządzeń wifi w polskich mieszkaniach i domach – miejscach,
gdzie każdy z nas spędza większość swojego wolnego czasu. Jest to wynikiem ludzkiej
wygody, a bezprzewodowy dostęp do urządzeń czy Internetu w domach jest tego
potwierdzeniem. Bezprzewodowy laptop, wi-fi w telefonie, drukarka z funkcją
238
XXI Sympozjum PTZE, Lubliniec 2011
bezprzewodowego drukowania czy telewizor z dostępem do YouTube to obecnie coraz
częściej spotykany sprzęt domowy.
Jak zatem te urządzenia wpływają na lokalne środowisko, czy pola przez nie generowane są
bezpieczne, jakie są oddziaływania kilkudziesięciu obok siebie działających urządzeń wifi?
Próby odpowiedzi na te pytania podjęli się pracownicy i studenci Politechniki Lubelskiej.
Pomiary natężeń pól elektromagnetycznych przeprowadzano w budynkach zlokalizowanych
na terenie kampusu Politechniki Lubelskiej. Głównym obszarem badań były akademiki oraz
wybrane budynki Wydziału Elektrotechniki i Informatyki. Domy studenckie to obiekty o
dużym nasyceniu urządzeń elektryczno-elektronicznych oraz punktów dostępowych wi-fi (na
wielu piętrach wykrywano po kilkanaście punktów!), co wyraźnie przekłada się na większe
wartości natężeń pól elektromagnetycznych w zestawieniu z budownictwem wielorodzinnym
(blok mieszkalny) czy jednorodzinnym. W celu porównania i odniesienia otrzymanych
wyników do innych obszarów dokonano również pomiarów w D.S. „Jowisz‖ Uniwersytetu
Marii Curie-Skłodowskiej oraz w kilku blokach mieszkalnych na terenie Lublina.
Do pomiarów realizowanych przez studentów koła naukowego został wykorzystany mobilny
miernik TES-92. Jest to miernik szerokopasmowy służący do pomiarów promieniowania o
wysokiej częstotliwości w zakresie od 50 MHz do 3,5 GHz.
1000
E [m V/m ]
A
B
C
1000 E [m V/m ]
D
100
100
10
10
1
A
B
C
D
1
1
2
3
4
5
6
7
8
9
10
0
1
2
3
akademik DS1, PL
1000
A
B
5
6
7
8
9
10
akademik DS2, PL
1000
E [m V/m ]
4
C
D
100
100
10
10
1
A
E [m V/m ]
B
C
D
1
0
1
2
3
4
5
6
7
8
9
10
akademik DS3, PL
0
1
2
3
4
5
6
7
8
9
10
akademik DS4, PL
Rys. 1. Emisja elektromagnetyczna zmierzona w czterech domach studenckich zlokalizowanych na terenie
kampusu PL, na każdym piętrze pomiary realizowano w czterech punktach pomiarowych A,B,C,D
Realizowane pomiary to pierwsza, niezbyt jeszcze dokładna, wstępna faza badań. Mała
precyzja wynika z zaistniałych błędów, których powodem jest szerokopasmowa zasada
działania miernika. Dokonuje on pomiaru w szerokim spektrum częstotliwości od 50 MHz do
239
XXI Sympozjum PTZE, Lubliniec 2011
3,5 GHz. W paśmie tym pracuje wiele urządzeń: aparatura nadawcza radia i telewizji,
urządzenia GSM, UMTS, bezprzewodowa łączność telefoniczna oraz urządzeń technologii
Wi-Fi 2,4 GHz. Brak selektywności na pasmo 2.4 GHz nie pozwala precyzyjnie omówić
szczegółowych oddziaływań, niemniej pozwala zlokalizować obszary o największych
natężeniach, gdzie w kolejnej fazie będą powtórzone badania profesjonalnym sprzętem.
Zmierzone wartości zostały zaprezentowane na poniższych wykresach. Widoczny wzrost
promieniowania wraz ze wzrostem wysokości pomiarowej spowodowany jest zwiększonym
oddziaływaniem anten telefonii komórkowej GSM oraz sygnałów radio-telewizyjnych.
Z uwagi na wysoki poziom uprzemysłowienia na terenach zurbanizowanych i związaną z tym
dużą liczbę potencjalnych źródeł pól elektromagnetycznych warto prowadzić systematyczne
badania natężeń pól elektromagnetycznych. Niestety, taki monitoring wymaga dużych
nakładów logistycznych – aparatury i przeszkolonych osób prowadzących pomiary.
Pozytywnym wynikiem wstępnych badań jest stwierdzenie
braku
przekroczeń
dopuszczalnych wartości natężeń pola w paśmie w.cz. Niemniej dokładne wyniki wymagają
profesjonalnej aparatury pomiarowej, dlatego część punktów pomiarowych zostanie
ponownie przebadana.
Literatura
[1] Danowski B., WI-FI darmowe sieci bezprzewodowe, http://strefawifi.pl
[2] Mazurek P. A., Pomiary pól wysokiej częstotliwości w środowisku zurbanizowanym, XIX Sympozjum
Środowiskowe, zastosowania Elektromagnetyzmu w nowoczesnych technikach i informatyce, Woliny
2009, ISBN 978-83-7373-055-7, ISSN 1233-336, str. 121-123.
[3] Mazurek P. A., Wac-Włodarczyk A., T. Parys, J. Rojek, K. Staroński, B. Solecki, M. Wójcik, M.
Stępniewski, Wybrane zagadnienia pomiarów natężeń pól elektrycznych i magnetycznych niskiej
częstotliwości na przykładzie miasta Lublin, XIX Sympozjum Środowiskowe, zastosowania
Elektromagnetyzmu w nowoczesnych technikach i informatyce, Woliny 2009, ISBN 978-83-7373-055-7,
ISSN 1233-336, str. 125-127.
[4] Parys T., Rojek J., Solecki B., Mazurek P. A., Wybrane zagadnienia pomiarów natężeń pól elektrycznych i
magnetycznych niskiej częstotliwości oraz hałasu, Lubelski Kongres Studenckich kół Naukowych TYGIEL
2009 – czyli jak rozwijać naukę?, Wydawnictwa Uczelniane Politechniki Lubelskiej, ISBN 978-83-7497078-5, s. 190-194.
[5] Parys T., Ziętek Ł., Bernat M., Buryło K., Masłowski G., Michałowski E., Mazurek P., O czym producenci
telefonów komórkowych wolą Ci nie mówić?, II Lubelski Kongres Studenckich Kół Naukowych – Tygiel
2010 – czyli jak rozwijać naukę?, Lublin 22-23 września 2010, 257-266.
[6] Skiba P., Zagrożenia związane z technologiami bezprzewodowymi Wi-Fi, http://strefawifi.pl
[7] Wac-Włodarczyk A., Mazurek P.A., Parys T., Ziętek Ł., Bernat M., Masłowski G., Badanie emisji
elektromagnetycznej wybranych telefonów komórkowych, rozdział w monografii: Energia
niekonwencjonalna i zagospodarowanie odpadów, red. Wiatr I., Marczak H., ISBN 978-83-62025-06-0,
Lubelskie Towarzystwo Naukowe, Lublin 2010, str. 245-255.
240
XXI Sympozjum PTZE, Lubliniec 2011
WPŁYW PODSTAWOWYCH PARAMETRÓW PRACY
REAKTORA PLAZMOWEGO TYPU GLIDARC NA
WARTOŚCI ZABURZEŃ PRZEWODZONYCH
Andrzej Wac-Włodarczyk1, Andrzej Kaczor2
1
Politechnika Lubelska, Instytut Podstaw Elektrotechniki i Elektrotechnologii,
2
Urząd Komunikacji Elektronicznej Delegatura w Lublinie,
Wstęp
Reaktory plazmowe ze ślizgającym się wyładowaniem łukowym typu GlidArc są źródłem
plazmy nietermicznej wykorzystywanej coraz częściej do eliminacji szkodliwych związków
lotnych w gazach [1], [2]. Ochrona środowiska naturalnego jest ważnym aspektem
społecznym nie mniej jednak należy pamiętać, że takie urządzenia muszą spełniać również
wymagania w zakresie kompatybilności elektromagnetycznej (EMC).
We wcześniejszych publikacjach autorzy przedstawili rezultaty badań, z których wynika, że
zaburzenia przewodzone na liniach zasilających reaktor są na tyle duże, że znacznie
przekraczają wartości dopuszczalne określone przez normę odpowiednią dla środowiska
przemysłowego – takiego w jakim docelowo reaktor będzie pracował [3]. Aby doprowadzić
do zgodności z odpowiednimi wymaganiami w zakresie EMC należy dokonać szeregu badań,
które potwierdzą, jakie parametry pracy reaktora wpływają na wartości zaburzeń
elektromagnetycznych emitowanych przez reaktor. Dopiero po tak szczegółowych badaniach,
można określić jakiego rodzaju metody lub urządzenia należy zastosować w celu ograniczenia
tych zaburzeń [4].
Wpływ parametrów pracy reaktora na wartości zaburzeń
W czasie badań autorzy sprawdzili wartość zaburzeń przewodzonych na liniach zasilających
reaktor plazmowy typu GlidArc zainstalowany w Instytucie Podstaw Elektrotechniki i
Elektrotechnologii Politechniki Lubelskiej uwzględniono takie parametry jak rodzaj gazu
roboczego przepływającego przez reaktor, jego prędkość, oraz wartość prądu zasilania układu
roboczego. Wymienione czynniki wybrano ze względu na fakt, że podlegają one
najczęstszym zmianom w naturalnych warunkach pracy reaktora. Należy jednak zaznaczyć,
że są również inne zmienne, które mogą wpływać na wartości zaburzeń
elektromagnetycznych np. kształt elektrod roboczych, rodzaje układów zasilania elektrod
roboczych oraz zapłonowych.
Wyniki badań wskazują, że największy wpływ na wartości zaburzeń przewodzonych ma
rodzaj gazu roboczego. W rozpatrywanym przypadku był to argon lub powietrze. Pozostałe
parametry w czasie tego badania, takie jak prąd układu zasilania elektrod roboczych oraz
przepływ gazów były niezmienne. Pomiary wykonano za pomocą detektora Peak (PK).
241
XXI Sympozjum PTZE, Lubliniec 2011
Level dBuV
95
90
85
Rys. 1. Napięcie zaburzeń na linii L1 zasilającej
reaktor plazmowy przy wykorzystaniu gazów
roboczych – powietrza lub argonu
80
75
70
QP (limit line) - PN-EN 61000-6-4:2004
Moving average (powietrze; PK)
Moving average (argon; PK)
65
60
Frequency MHz
55
1
10
Różnica wartości zaburzeń dla wymienionych gazów roboczych wynosi do 15 dB, przy czym
wartości zaburzeń są większe dla powietrza.
Takich dużych różnic nie obserwuje się w przypadku różnych wartości przepływności gazów
roboczych oraz prądów płynących przez układ roboczy.
94 Level dBuV
92
90
88
86
84
82
80
78
76
74
72
70
68
66
94 Level dBuV
92
90
88
86
84
82
80
78
76
74
72
70
68
Frequency MHz 66
b)
a)
QP (limit line) - PN-EN 61000-6-4:2004
Moving average (PK; L1; 2,5m3/h)
Moving average (PK; L1; 3m3/h)
Moving average (PK; L1; 3,5m3/h)
Moving average (PK; L1; 4m3/h)
1
10
QP (limit line) - PN-EN 61000-6-4:2004
Moving average (PK; L1; 5A)
Moving average (PK; L1; 10A)
Moving average (PK; L1; 12,5A)
Moving average (PK; L1; 15A)
Moving average (PK; L1; 20A)
1
Frequency MHz
10
Rys. 2. Napięcie zaburzeń na linii L1 zasilającej reaktor plazmowy dla różnych wartości a) przepływności gazów
roboczych b) prądów płynących przez układ roboczy
Pomiary wykonywano wprowadzając do kolumny reaktora powietrze o przepływności 2,5; 3;
3,5 oraz 4 m3/h. Nie zauważono większej zmiany wartości zaburzeń przewodzonych,
a różnice rzędu kilku decybeli mogą być spowodowane niesymetrycznością i niestabilnością
łuku w reaktorze. Wartość prądu zasilania wynosiła 15 A.
Podobną sytuację można zauważyć przy zmianie wartości prądu płynącego przez układ
roboczy reaktora. Jego wartość mierzona była po stronie pierwotnej układu zasilania elektrod
roboczych. W tym przypadku również nie zauważono większej zmiany wartości zaburzeń
przewodzonych na linii zasilającej reaktor plazmowy. Pomiarów dokonano przy utrzymaniu
stałego poziomu przepływności 3 m3/h.
Na wykresach przedstawiono wartość graniczną wartości zaburzeń na liniach zasilających
określoną dla środowiska przemysłowego przez normę PN-EN 61000-6-4:2004 [5]. Jak
można zauważyć zmierzone wartości zaburzeń znacznie przekraczają poziom dopuszczalny
dla wszystkich nastaw wykonywanych w czasie badań.
Pomiary przeprowadzono przy zastosowaniu detektora wartości szczytowej (PK) oraz
średniej (AV) przy czasie obserwacji jednego pomiaru 10 ms. Układ zasilany był z trzech
oddzielnych transformatorów dla każdej fazy dla elektrod roboczych.
Wnioski
Przedstawione wyniki badań wskazują, że niektóre parametry reaktora plazmowego znaczne
wpływają na wartości zaburzeń przewodzonych na jego liniach zasilających. Należy zatem
wziąć pod uwagę przy projektowaniu układu filtrów, że takie zależności mogą nastąpić
242
XXI Sympozjum PTZE, Lubliniec 2011
w czasie normalnej pracy reaktora. Bardzo duże znaczenie ma skład gazu roboczego.
W naturalnych warunkach pracy skład ten może być różny i nie zawsze będzie
przewidywalne jego stężenie, dlatego docelowo należy wykonać pomiary zaburzeń
elektromagnetycznych przy różnych – możliwych do przewidzenia – gazach roboczych.
Literatura
[1] Stryczewska H.D., “Technologie plazmowe w energetyce i inżynierii środowiska”, Wydawnictwo
Politechniki Lubelskiej, Lublin 2009;
[2] Pikon K., Czekalska Z., Stelmach S., Scierski W., ”Zastosowanie metod plazmowych do oczyszczania gazu
procesowego ze zgazowania biomasy” Archiwum Gospodarki Odpadami i Ochrony Środowiska (ISSN
1733-4381) Vol 12 Nr 4/2010, s.61-72;
[3] Wac-Włodarczyk A., Kaczor A. “Reaktor plazmowy ze ślizgającym się wyładowaniem łukowym jako
źródło elektromagnetycznych zaburzeń przewodzonych”, Przegląd Elektrotechniczny (Electrical Review,
ISSN 0033-2097, R 85) Nr 12/2010, s.164-167;
[4] Kaczor A., Wac-Włodarczyk A. “Ocena zgodności wyrobów z wymaganiami zasadniczymi w zakresie
kompatybilności elektromagnetycznej”, Przegląd Elektrotechniczny, Nr 12/2009, s. 61-64;
[5] PN-EN 61000-6-4:2004 ―Kompatybilność elektromagnetyczna (EMC) Część 6-4: Normy Ogólne Norma
emisji w środowiskach przemysłowych”, Polski Komitet Normalizacyjny, Warszawa 2004.
243
XXI Sympozjum PTZE, Lubliniec 2011
OCHRONA KATODOWA PODZIEMNYCH ZBIORNIKÓW
Agnieszka Wantuch
AGH Akademia Górniczo-Hutnicza, Katedra Elektrotechniki i Elektroenergetyki
Kraków
Abstract – Niniejszy artykuł opisuje metodę obliczania gęstości prądu, potencjału i polaryzacji w obrębie
konstrukcji metalowych znajdujących się w ziemi. Ochrona antykorozyjna stalowych zbiorników jest
osiągana dzięki wykorzystaniu elektrod ochronnych. Symulację wykonano w przestrzeni 3D.
I. Wprowadzenie
Zależnie od rodzaju korozji oraz charakteru chemicznego czynników korozyjnych istnieje
wiele sposobów jej zapobiegania lub przynajmniej zmniejszania skutków. Jedną z najczęściej
stosowanych metod ochrony przed korozją jest ochrona katodowa. Tradycyjne powłoki
zapewniają wyłącznie ochronę bierną stalowych powierzchni. Ochrona katodowa jest
aktywną elektrochemiczną metodą polegającą na bezpośrednim oddziaływaniem na
mechanizm i kinetykę procesów korozyjnych.
Ochronę korozyjną można stosować dla obiektów już istniejących, częściowo zniszczonych
procesami korozyjnymi, ponieważ umożliwia ona zahamowanie dalszych procesów
korozyjnych i utrzymanie stabilnego stanu w przyszłości.
Prądy błądzące
Stalowa
ścianka
obiektu
mikroorganizmy
Środowisko
korozyjne
Środowisko
korozyjne
Stalowa
ścianka
obiektu
Defekty w powłoce
Prąd ochrony
katodowej
Prąd makroogniwa
Powłoka ochronna
Powłoka ochronna
Rys. 2. Prąd ochrony katodowej dopływa do
metalowych elementów w miejscach defektów w
powłoce ochronnej
Rys. 1. Korozja następuje w defektach powłoki
izolacyjnej
II. Podstawowe równania
W procesie korozji wyróżniamy dwa rodzaje reakcji elektrochemicznych: anodową i
katodową. Najważniejsze reakcje katodowe związane są z pojawianiem się H2 w roztworach
elektrolitów.
2H + +2e- H 2
ph 7
2H 2 O+2e H 2 +2OH
-
-
ph 7
Rozkład potencjału w elektrolicie opisuje równanie:
div grad 0
244
(33)
XXI Sympozjum PTZE, Lubliniec 2011
Równanie to rozpatrujemy uwzględniając warunki brzegowe Neumana:
i n in grad n
n
(34)
Składowa normalna wektora gęstości prądu in na granicy metal-elektrolit jest dana
równaniem:
in f (U E0 )
(35)
gdzie: U jest różnicą potenciałów w warstwie podwójnej, a E0 jest napięciem równowagi na
tej warstwie.
Zjawisko przeniesienia ładunku na granicy metal dielektryk opisane jest za pomocą równania
Butlera-Volmera [1].
i( ) ia ic io exp
a
exp
c
(36)
gdzie:
RT
nF
RT
c
(1 )nF
a
(37)
i0 – gęstość prądu wymiany [A/m2]
i – gęstość prądu na granicy metal-elektrolit
V E0 – nadpotencjał danej elektrody [V]
V – potencjał przeniesienia na elektrodzie korodującej
E0 – potencjał elektrody w stanie równowagi.
Zakładając, iż pomiędzy anodą i katodą włączone jest źródło prądu stałego, warunki
brzegowe na granicy metal-elektrolit zadane są przez warunki brzegowe Neumana. Układ
równań, które powinny być spełnione przy zasilania układu źródłem prądu ma postać:
0
i
n
d J0
c
(38)
(39)
gdzie: c jest powierzchnią katody.
III. Obliczenia
Do symulacji przyjęto następujące dane: Eeqa 2.23V, j0a = 0.02A, βa 0.1, ζa 0.1S/m,
Eeqc 0.44V, j0c = 0.015A, βc 0.1, ζc 0.3S/m, ζe 2S/m.
245
XXI Sympozjum PTZE, Lubliniec 2011
Rys. 3. Nadpotencjał na katodzie
Rys. 4. Linie ekwipotencjalne w elektrolicie
Na rys. 3 przedstawiono wykres nadpotencjału na katodzie. Linie ekwipotencjalne wokół
zbiornika i anody przedstawiono na rys.4.
IV. Wnioski
Przedstawiona metoda pozwala na dokładne obliczenie gęstości nadpotencjału i gęstości
prądu zarówno na chronionym zbiorniku jak i anodzie. Dane te mogą być pomocne przy
projektowaniu takiego rozkładu elektrod, by cały zbiornik był w pełni chroniony.
Przedstawiony model został zbudowany w przestrzeni 3D. Wykresy podanych wielkości
wykonano w płaszczyźnie XY.
Literatura
[1] Uhlig, H.H. (1971), Corrosion and corrosion control, Wiley, New York
[2] Kurgan E., Dąbrowski A.: Galvanic Cathodic Protection Systems with Current Sources Supply, XIII
International Symposium on Theoretical Electrical Engineering ISTET 2005
246
XXI Sympozjum PTZE, Lubliniec 2011
POJEMNOŚCI SPRZĘGAJĄCE
W DWUSTRONNYCH STRUKTURACH MIKROUKŁADU
Z WARSTWĄ DIELEKTRYKA
Bogusław Wisz
Politechnika Rzeszowska
Wydział Elektrotechniki I Informatyki
Zakład Systemów Elektronicznych I Telekomunikacyjnych
W niniejszym artykule przedstawiono analityczną metodę obliczania pojemności pomiędzy
ścieżkami przewodzącymi dla ich wybranych konfiguracji w mikroukładzie hybrydowym.
Celem prowadzonych prac, będących fragmentem kontynuowanych badań, jest opracowanie
ogólnego, uniwersalnego modelu matematycznego wyznaczania pojemności sprzęgających w
warstwowych strukturach hybrydowych.
Specyfika typowego, mikroelektronicznego układu hybrydowego, uwarunkowana złożonością
jego struktury, technologią realizacji, topografią ścieżek przewodzących, jak też stopniem
miniaturyzacji takiego układu, stwarza szczególnie podatne środowisko do tworzenia się
sprzężeń międzyelementowych, wśród których znaczącą rolę odgrywają sprzężenia
pojemnościowe. Wartość pojemności zależy w znacznym stopniu od topologii układu,
geometrycznych wymiarów ścieżek, jak też właściwości materiałowych czy przestrzennej
konfiguracji hybrydowej struktury.
Przedmiotem analizy jest układ dwu nieskończenie długich, równoległych względem siebie
ścieżek przewodzących, umieszczonych po obu stronach układu. Mogą być one przedzielone
lub pokryte warstwą dielektryka, spełniającego funkcję izolacyjną czy zabezpieczającą, jak
też stanowić medium dla czujników pojemnościowych służących do pomiaru różnych
wielkości fizycznych. Układy o dwustronnej konfiguracji ścieżek, zilustrowane
schematycznie na rys.1 stosuje się w klasycznych obwodach drukowanych, mikroukładach
hybrydowych, grubowarstwowych czujnikach, układach LTCC i innych.
a)
b)
c)
d)
Rys.1. Sprzężenia pojemnościowe w mikroukładzie hybrydowym: a) widok struktury warstwowej, b), c), d)
konfiguracje w dwustronnym układzie ścieżek przewodzących, widok w płaszczyźnie x - z
247
XXI Sympozjum PTZE, Lubliniec 2011
Problem określenia wartości pojemności można w rozważanym przypadku rozpatrywać jako
zagadnienie dwuwymiarowe. Przyjęto przy tym, że :
płytka podłożowa o grubości h1 i przenikalności dielektrycznej 1 oraz warstwa
dielektryczna o grubości h2 i przenikalności dielektrycznej 2 mają nieskończenie
dużą długość i szerokość;
grubość ścieżek przewodzących jest pomijalnie mała;
współczynnik przenikalności dielektrycznej obszaru powyżej warstwy dielektrycznej
wynosi powierzchni 3, a poniżej powierzchni podłoża 4
do ścieżek przewodzących o szerokości odpowiednio w1 i w2 przyłożono napięcia
V1=1V i V2=-1V; przy czym lim V 0
x2 z2
Rozwiązanie powyższego zagadnienia brzegowego wymagało rozwiązania równania
Laplace’a, z którego – przy zadanych wartościach napięć V1 i V2 – określono rozkłady
gęstości ładunków q1 i q2 zgromadzonych na powierzchniach ścieżek przewodzących, a
następnie ładunek całkowity, skąd wyznaczono pojemność na podstawie jej definicyjnej
zależności.
Do rozwiązania równanie Laplace’a zastosowano metodę przekształceń całkowych Fouriera:
Dla potencjału V(x,z) otrzymuje się:
1
(1)
V( x , z )
F(, z) e j x d
2
gdzie
F(, z) V( x, z) e j x dx
(2)
jest transformatą V(x,z). Rozwiązani można zapisać w postaci:
R 1 e ( z h )
z h2
R 2 sinh z R 3 cosh z
h2 z 0
(3)
F
0 z h1
R 4 sinh z R 5 cosh z
(zh )
R 6 e
z h1
Współczynniki R1() – R6() wyznacza się z klasycznych dla pola elektrostatycznego
warunków brzegowych:
ciągłości potencjału na granicy dwóch ośrodków
(4)
V ( x , z ) z h V ( x , z ) z h , V( x , z ) z 0 V( x , z ) z 0 , V ( x , z ) z h V ( x , z ) z h
2
1
2
2
1
1
ciągłości składowej normalnej indukcji elektrycznej Dn na granicy dwóch ośrodków
w tym obszarze płaszczyzny osi z (z0), gdzie nie ma ścieżek przewodzących
D( x, z) zz D( x, z)
0
zz0
(5)
skokowej zmianie składowej normalnej indukcji elektrycznej Dn na granicy dwóch
powierzchni (warstwy przewodzącej z podłożem lub dielektrykiem), równej gęstości
powierzchniowej ładunku elektrycznego.
q ( x ) a 1 x a 2
D n ( x, z) z h D n ( x , z) z h 1
i
i
poza obszarem ścieżki
0
q ( x ) c1 x c 2
,
D n ( x, z) z h D n ( x, z) z h 2
j
j
0
p
oza
obszarem
ścieżki
248
(6)
(7)
XXI Sympozjum PTZE, Lubliniec 2011
gdzie hi oraz hj przyjmują wartości zależne od usytuowania odpowiednio górnej i dolnej
ścieżki przewodzącej w płaszczyźnie osi z.
W rezultacie otrzymano układ dwóch równań całkowych z niewiadomymi q1 i q2, który
rozwiązano metodą kolokacji, a następnie wyznaczono całkowity ładunek zgromadzony na
ścieżkach i na tej podstawie obliczono wartość pojemności sprzęgających pomiędzy
ścieżkami przewodzącymi.
Dla przedstawionego modelu matematycznego opracowano stosowne procedury numeryczne
uwzględniając konfiguracje układowe przedstawione na rys. 1. Przeprowadzono szereg badań
symulacyjnych, określając wpływ wybranych parametrów geometrycznych i materiałowych
na wartość pojemności. Dla wybranych układów przeprowadzono doświadczalną weryfikację
obliczeń numerycznych otrzymując wysoce zadowalającą ich zgodność z rezultatami
pomiarów.
249
XXI Sympozjum PTZE, Lubliniec 2011
POLE ELEKTROMAGNETYCZNE –
ATRAKTANT CZY REPELENT DLA OWADÓW?
Joanna Wyszkowska, Maria Stankiewicz
Uniwersytet Mikołaja Kopernika, Wydział Biologii i Nauk o Ziemi, Zakład Biofizyki, Toruń
Rozwój nowych technologii oraz rosnące zapotrzebowanie na energię elektryczną powoduje,
że pole elektromagnetyczne staje się istotnym składnikiem otaczającego nas środowiska. Stąd
też coraz częściej pojawiają się społeczne obawy związane z możliwym niekorzystnym
wpływem pola elektromagnetycznego na zdrowie człowieka. Aby dać odpowiedź na pytanie,
czy emitowane przez towarzyszące nam urządzenia pole elektromagnetyczne stanowi
zagrożenie dla zdrowia człowieka należałoby poznać mechanizm jego oddziaływania na
organizmy żywe. Czy u ludzi występuje „zmysł elektromagnetyczny‖ nie wiadomo;
stwierdzono natomiast jego występowanie u wielu organizmów. Na przykład, bakterie
magnetotaktyczne i glony przemieszczają się wzdłuż linii pola magnetycznego (Frankel i
Blakemore, 1989). Pszczoły miodne kierują się liniami pola magnetycznego nie tylko
w nawigacji ale także przy budowie równoległych arkuszy plastrów miodu (De Jong, 1982).
Ptaki wędrujące korzystają z „nawigacji magnetycznej‖. Również rekiny i płaszczki są znane
z ich zdolności do wykrywania pola magnetycznego Ziemi (Kalmijn, 1982).
Jak żywe organizmy wykrywają pole magnetyczne? Większość zwierząt lądowych
wykorzystuje stałe biogenne magnesy w postaci kryształów magnetytu. Kryształy takie
wykryto w bakteriach, u owadów (Acosta-Avalos i współpr., 1999; Esquivel i współpr., 1999;
Abracado i współpr., 2005; Lucano, 2006), u ryb, żółwi, gołębi, i ssaków (Kirschvink i
współpr. 1992; Dobson, 2000; Lohmann i Johnsen, 2000).
Uważa sie, ze owady stanowią dobry model do badania zjawiska magnetorecepcji.
W literaturze można znaleźć prace prowadzone na wielu gatunkach m.in. na: Spodoptera
litura (Chae, 2008), Drosophila melanogaster (Dommer i współpr., 2008a, 2008b; Matsuda
2011), Lasioderma serricorne (Matsuda i współpr., 2011), Musca domestica (McGonigle
i współpr., 2002), Tenebrio molitor (Vacha i współpr., 2008), Solenopsis substituta (Abracado
i współpr., 2005). Stwierdzono np., że kryształki magnetyczne rozmieszczone są w głowie,
tułowiu i odwłoku mrówek. A ich ilość jest nieco wyższa w głowie niż w odwłoku (Abracado
i współpr., 2005).
Wielu autorów sugeruje, że elementem czułym na pole magnetyczne są anteny. Znaleziono
ferromagnetyczne cząsteczki np. w antenach pszczół (Lucano, 2006) i mrówek (Wajnberg i
współpr., 2004). Hunt i współpr. (2005) wykazali, że karaczan amerykański unika pola
elektrostatycznego, a w detekcji biorą udział anteny i głaszczki (palpi); usunięcie cerci nie
zmienia wrażliwości owada. Istnieją przypuszczenia, że przydatki owada są zaangażowane w
wykrywanie pola elektrycznego, w ten sam sposób w jaki włosy na ciele, mogą przyczyniać
się do recepcji przez ludzi pola elektrycznego (Chapman i współpr., 2005; Newland i
współpr., 2008).
Doświadczenia własne prowadzone były na dorosłych samcach karaczana amerykańskiego
Periplaneta americana. Pokazały one, że karaczan „reaguje‖ na pole elektromagnetyczne.
Jego działanie (o natężeniu 7 mT) powoduje wyraźny wzrost aktywności motorycznej
owadów (Wyszkowska, 2006a, 2006b). Usunięcie cerci nie wpływało na zachowanie owadów
w polu elektromagnetycznym. Celem prezentowanych badań było sprawdzenie czy silne pole
250
XXI Sympozjum PTZE, Lubliniec 2011
magnetyczne odstrasza owady, czy może istnieje jakaś wartość indukcji magnetycznej, która
jest „korzystna i atrakcyjna‖ dla nich? Aby odpowiedzieć na to pytanie posłużyliśmy się
gradientem pola magnetycznego (50 Hz), w którym wartość pola elektromagnetycznego
zmieniała się (względem wartości tła) przestrzennie w zakresie od 0 mT do ok. 7 mT. Owady
w czasie doświadczenia mogły swobodnie się przemieszczać. Oprócz „preferencji polowych‖
(czyli obszarów o określonej wartości indukcji pola magnetycznego, w których przebywały
owady) obserwowane było zachowanie się owadów. Na podstawie przeprowadzonych
obserwacji stwierdziliśmy, że karaczany nie unikają silnego pola magnetycznego (7 mT) a
niski poziom pola (ok. 1 mT) można określić jako „atrakcyjny‖ dla nich. Był on częściej
wybierany przez owady niż obszar kontrolny (0 mT)). Ponadto obserwacja zachowania
owadów wskazuje, że anteny, cerci oraz tylne odnóża nie biorą udziału w magnetorecepcji.
Zwiększona aktywność owadów „w okolicach palpi‖ może natomiast sugerować, że być
może tam znajdują się struktury odpowiedzialne za recepcję pola magnetycznego.
Uważa się, że poznanie mechanizmów oddziaływania pola elektromagnetycznego na żywe
organizmy może doprowadzić do jego wykorzystania jego jako jednego z „ekologicznych‖
środków ochrony żywności, roślin, zwierząt i ludzi przed owadami (McGonigle 2002,
Matsuda, 2011).
Literatura
[1] Abracado LG., Esquivel DMS., Alves OC., Wajnberg E., 2005. Magnetic material in head, thorax, and
abdomen of Solenopsis substituta ants: A ferromagnetic resonance study. J. Magn. Res. 175, 309–316.
[2] Acosta-Avalos D., Wajnberg E., Oliveira PS, Leal I., Farina M., Esquivel DMS., 1999. Isolation of
magnetic nanoparticles from Pachycondyla marginata ants, J. Exp. Biol. 202, 2687–2692.
[3] Chae KS., 2008. An extremely low frequency magnetic field increases unconditioned larval movement of
the common cutworm, Spodoptera litura: A novel model for a magnetoreceptive neurobehavioral study.
Entomological Research 38, 299–302.
[4] Dommer, DH., Muheim, RM., Gnirke, MS., Tran, DQ., Phillips, JB., 2008a. The light dependent magnetic
compass of Drosophila larvae: Viewing a complex pattern with a simple detector, in preparation.
[5] Dommer DH., Gazzolo PJ., Painter MS., Phillips JB., 2008b. Magnetic compass orientation by larval
Drosophila melanogaster. J. Insect Physiol. 54, 719–726.
[6] De Jong D. 1982. The orientation of comb-building by honeybees. J Comp Phys 147, 495:501.
[7] Frankel RB, Blakemore RP., 1989. Magnetite and magnetotaxis in microorganisms. Bioelectromagnetics,
10, 223:237.
[8] Esquivel DMS., Acosta-Avalos D., El-Jaick LJ., Cunha ADM., Malheiros MG., Wajnberg E., Linhares
MP., 1999. Evidence for magnetic material in the fire ant Solenopsis sp. by electron paramagnetic
resonance measurements, Naturwissenschaften 86, 30–32.
[9] Kalmijn AJ., 1982. Electric and magnetic Field detection in elasmobranch fishes. Science, 218, 916:918
[10] Lohmann KJ., Johnsen S., 2000.The neurobiology of magnetoreception in vertebrate animals. Trends
Neurosci 23, 153:159.
[11] Kirschvink JL., Kirschvink AK., Woodford BJ., 1992. Magnetite biomineralization in the human brain,
Proc. Natl. Acad. Sci. USA 26, 7683–7687.
[12] Dobson J., 2000. Investigation of age-related variations in biogenic magnetite levels in the human
hippocampus, J. Exp. Brain Res.144, 122–126.
[13] Matsuda Y., Nonomura T., Kakutani K., Takikawa Y., Kimbara J., Kasaishi Y., Osamura K., Kusakari S.,
Toyoda H, 2011. A newly devised electric field screen for avoidance and capture of cigarette beetles and
vinegar flies. Crop Protection 30, 155-162.
[14] McGonigle DF., Jackson CW., Davidson JL., 2002 Triboelectrification of houseflies (Musca domestica L.)
walking on synthetic dielectric surfaces. J. Electrostat. 54, 167–177.
[15] Newland PL., Hunt E., Sharkh, SM., Hama N., Takahata M., Jackson CW., 2008. Static electric field
detection and behavioral avoidance in cockroaches. Br. J. Exp. Biol. 211, 3682-3690.
[16] Vácha, M., Puzová, T., Drstková, D. (2008). Effect of light wavelength spectrum on magnetic compass
orientation in Tenebrio molitor. J. Comp. Physiol. A 194, 853-859.
[17] Wajnberg E., Cernicchiaro G. Esquivel D., 2004. Antennae: the strongest magnetic part of the migratory
ant, Biometals 17, 467–470.
251
XXI Sympozjum PTZE, Lubliniec 2011
[18] Wyszkowska J., Stankiewicz M., Krawczyk A., Zyss T., 2006a. Evaluation of Motor Activity of Insect
Evoked by Electromagnetic Field, EHE'06 – International Conference on Electromagnetic Fields, Health
and Environment in Madeira, 2.57-2.59.
[19] Wyszkowska J., Stankiewicz M., Krawczyk A., 2006b. Examination of nervous system exposed to
electromagnetic field on the example of cockroach (Periplaneta americana), Przeg. Elektrotech., R. 82 66-67.
252
XXI Sympozjum PTZE, Lubliniec 2011
AN ALGORITHM FOR THE ELECTRIC CIRCUITS
CALCULATION ON THE BASIS OF INSTANTANEOUS
POWER COMPONENTS BALANCE
Mykhaylo Zagirnyak, A. Kalinov, M. Maliakova
Kremenchuk Mykhailo Ostrohradskyi National University,
Kremenchuk, Ukraine
Introduction
The methods for nonlinear circuits analysis can be divided into three large groups: analytical,
graphic and numeral [1]. There are certain shortcomings for each of these groups, such as:
graphic methods do not give availability of general dependences, analytical and numeral are
less demonstrable and cumbersome. The using of these methods is limited by their
dependence of calculation accuracy on the nonlinear approximation accuracy.
Theoretical theses
Nonlinear electric circuits calculation can be carried out basing on balance equations of
instantaneous power (IP) components. It gives possibility to determine electric circuit
parameters when there is significant nonlinearity manifestation and it is not correct to apply
the principle of currents harmonic components superposition [2].
The instantaneous power equation can be given as:
p( t )
m M
m 0
I m cos( mt m )
n N
K M N
n 0
k 0
U n cos( nt n )
pk cos( kt k )
(1)
where pk is power harmonic amplitude, I m is current harmonic amplitude, U n is voltage
harmonic amplitude, m , n , k are rank of current, voltage and power harmonic components,
accordingly, m , n , k are shearing angle of current, voltage and power harmonics,
accordingly, is an angular frequency.
Equations for the analysis of electric circuits with instantaneous power technique are based on
the balance of instantaneous power components. Each power component consists of three
components – mean value of power p0 , sign-changing cosine and sine components p a , pb ,
accordingly:
p(t ) p0k pak (t ) pbk (t )
(2)
The algorithm for the instantaneous power components determination was developed. It is
based on the convolution theorem, which is known from the theory of signals. This theorem
means that the Fourier Transform (FT) of the two signals product is the convolution of their
253
XXI Sympozjum PTZE, Lubliniec 2011
FT [6]. The generation algorithm for the cosine and sine instantaneous power components
shown in general view:
N 1
N 1
Re( Pk ) if ( m k 0 , Im( I k )Re( U m k ), Im( I k ) Re( U k m )) if ( m k 0 , Im( I k ) Im( U m k ), Im( I k ) Im( U k m ))
k 0
k 0
N
1
N
1
Im( Pk ) if ( m k 0 , Im( I k ) Re( U m k ), Im( I k ) Re( U k m )) if ( m k 0 , Re( I k ) Im( U m k ), Re( I k ) Im( U k m ))
k 0
k 0
(3)
where Re( Pk ) is cosine instantaneous power component; Im( Pk ) is sine instantaneous power
component; Re( U k ) , Re( I k ) are cosine voltage and current components, accordingly; Im( U k ) ,
Im( I k ) are sine voltage and current components, accordingly; m , n are voltage and current
harmonic numbers, accordingly.
Algorithm (3) is realized by means of the symbolic calculations subsystem of the MathCad
mathematical package. It allows one to specify data either in symbolical or in numerical form.
Experimental results
As an example of the presented algorithm realization, calculated the instantaneous power
components for nonlinear electric circuits includes cord coil were. Researched circuit
parameters are: R 0.5Om , L 0.0143Hn . Nonlinear dependence function of inductance on
current L( I ) (fig. 1) can be approximated by the second-order polynomial function
L( I ) a0 a2 I 2 ( t )
and next coefficients were accepted a0 0.014289 ; a2 7.834681 108 .
Iductance (Hn)
0.0144
0.0142
0.014
0.0138
0.0136
0
50
Current (A)
100
Fig. 1. Dependence of induction on current
The relative errors meanings for effective value and harmonics of power and current were
used to confirm the accuracy of the values got with use of the instantaneous power algorithm.
Relative error for power and current effective values are 0.07% and 1.5% accordingly.
Relative errors for significant power and current harmonic components are less then 6.5% and
3% accordingly.
Conclusions
The offered algorithm of instantaneous power harmonic components forming and the solution
of the instantaneous power harmonic components balance equations showed the efficiency of
254
XXI Sympozjum PTZE, Lubliniec 2011
the nonlinear electric circuits analysis. The described algorithm can be developed for the more
difficult, branched electric circuits calculation.
References
[1] K.S. Demirchian, L.R. Neiman, N.V. Korovkin. Theoretical Fundamentals of Electrotechnics: Handbook
for higher educational establishments. – 5th edition. – V.2. – S-Pb.: Piter, 2009. – P. 127-157 (in Russian).
[2] Zagirnyak M.V. Elimination of the Influence of Supply Mains Low-Quality Parameters on the Rezults of
Induction Motor Diagnostics / M.V.Zagirnyak, D.G.Mamchur, A.P.Kalinov // Proceeding of XIX
International Conference on Electrical Machines, ICEM 2010. – Rome, Italy, 2010. – Paper RF-009474.
IEEE Catalog Number CFP1090B-CDR, ISBN 978-1-4244-4175-4, Library of Congress Number
2009901651.
255
XXI Sympozjum PTZE, Lubliniec 2011
ENHANCEMENT OF INSTANTANEOUS POWER METHOD
IN THE PROBLEMS OF ESTIMATION
OF ELECTROMECHANICAL COMPLEXES POWER
CONTROLLABILITY
Mykhaylo Zagirnyak, T. Korenkova, I. Alieksieieva
Kremenchuk Mykhailo Ostrohradskyi National University
Ukraine
Introduction
In the course of functioning in the power channel of an electromechanical complex (EMC)
there appear various energy states or conditions quantitatively characterized by a number of
electrical, power and mechanical parameters (voltage, current, power, rotation frequency and
moment), as well as process factors (productivity, pressure). A common parameter
characterizing a mode of EMC, however complex it may be, is its power expressed in the
same metric units independently of the physical nature of components included in the
expressions for its determination. Power variables (electric power, mechanical, kinetic,
hydraulic ones, etc.) provide a concrete characteristic of the current power conversion process
and make it possible to estimate the efficiency of the EMC power channel, its power
controllability (PC).
Research method and results
Integral estimates [1, 2] based on averaging of physical values at a given time interval and
connected with information loss caused by integration are usually used for the analysis of
processes in EMC. Development of the theory of power processes analysis resulted in the
application of the instantaneous power method allowing one to characterize power changes in
the time domain more completely [3, 4].
A system instantaneous power, determined by the product of voltage U (t ) and current I (t )
signals, includes the sum of constant and variable components:
N
M
K
K
n 1
m 1
k 1
k 1
P(t ) U (t ) I (t ) U na cos(nt n ) I ma cos(mt m ) P0 P ka cos(kt ) P kb sin(kt )
(1)
where U na , I ma – voltage and current peak values, correspondingly; n, m – voltage and current
harmonics numbers, correspondingly; N, M – number of voltage and current components;
, – phase angles; 2f – circular frequency; f – signal change frequency; t – signal
change time; P0 – instantaneous power total constant component; Pka – instantaneous power
cosine component; Pkb – instantaneous power sine component; k – power harmonic number
( k m n ); K – number of power components harmonics.
Instantaneous power component variable in time characterizes the process of energy
exchange between the power network and the consumer, the technological mechanism and the
motor. This is accompanied by decrease of power efficiency of energy conversion process and
256
XXI Sympozjum PTZE, Lubliniec 2011
is conditioned by demonstration of specific properties of electromechanical equipment,
influence of the elements with nonlinear characteristics, presence of energy storages, etc.
Totality of balance equations for instantaneous power in any EMC element is a condition
for effective application of such an approach.
As applied to a drive motor, a balance equation is of the form:
(2)
Ped (t ) Pi (t ) P (t )
where Pi (t ) – power at the motor power supply terminals; P (t ) – motor losses power,
determination of which is based on making balance equations of instantaneous power on the
elements of electric motor equivalent circuit.
For rotating masses with constant moment of inertia of the motor:
d (t )
(3)
Ped (t ) M s (t ) (t ) J (t ) (t )
dt
where M s (t ) – static moment of resistance; J (t ) – moment of the motor; (t ) – angular
velocity.
Similar result can be obtained for the power of process load. So, when analysis of power
processes in hydraulic transport complex is made, hydraulic power at a pumping plant output
is equal to:
Phydro(t) gH (t )Q(t )
(4)
where H (t ) A 2 2 (t ) B2 (t )Q(t ) C2Q 2 (t ) – pump output head; Q(t ) – pump
productivity; A 2 , B2 , D2 – approximation coefficients determined according to nameplate
head-consumption characteristic of the turbomechanism; (t ) i (t ) n (t ) – relative angular
velocity of the pump impeller; i (t ) , n (t ) – current and nominal velocities of the pump
impeller; – density of the pumped medium; g 9.81 m / sec2 – gravitational acceleration.
The paper contains EMC energy losses distribution schemes with different level of detail.
These schemes can be used as the basis for formulation of instantaneous power balance
equations.
The offered approach to estimation of EMC PC with the application of instantaneous
power method makes it possible to analyze power processes when they are changed in real
time with preservation of the complete information of the initial power forming signals, take
into account manifestation of electromechanical equipment specific properties, appearance of
power variable components loading power channel with additional components. In this case
effective power in the considered electromechanical system is a measure of estimation of the
T
quality of energy conversion processes: Pe
1
P 2 (t )dt . This effective power takes into
T 0
consideration energy losses in any EMC power channel link. Knowing effective power in
ideal system Pe.i (in the absence of most typical nonlinearities) and in real system Pe. f (in the
presence of nonlinearities reflecting the special character of technological mechanism electric
drive operation) one can determine EMC PC index: kc Pe.i Pe. f . If the system is completely
controllable, k c 1 ; if the system is uncontrollable, k c tends to zero. PC decrease is
accompanied by power processes with higher harmonics in the power spectrum and increase
of EMC effective power value.
257
XXI Sympozjum PTZE, Lubliniec 2011
Conclusions
It has been shown that estimation of power controllability of an object is based on the analysis
of processes of energy conversion in all the links of an electromechanical complex power
channel with the use of instantaneous power components. Presence of power component
variable, reflecting energy changing processes in the system, results in decrease of the object
controllability.
It has been proved that the offered approach is universal as it provides the possibility of the
analysis of power processes both in electrical and other systems: mechanical,
electromechanical, hydraulic, etc. where initial signals forming instantaneous power may be
of a complicated character (cyclic or noncyclic).
References
[1] V. E. Tonkal, A. V. Novoseltsev, S. P. Denisiuk et al., Energy Balance in Power Circuits, Kiev: Naukova
Dumka, 1992. – 312 p. (in Russian).
[2] O. A. Maievskii, Power indices of valve inverters, – Moscow: Energiia, 1975. – 320 p. (in Russian).
[3] H. Akagi, E.H. Watanabe, M. Aredes, Instantaneous Power Theory and Applications to Power
Conditioning, Hoboken, NJ: John Wiley & Sons, 2007. – 379 p.
[4] D. I. Rod’kin, ―Decomposition of polyharmonic signal power components‖, Elektrotekhnika, Moscow,
2003, no. 3, pp. 34-37 (in Russian).
258
XXI Sympozjum PTZE, Lubliniec 2011
WYDAJNA TRANSMISJA DANYCH WIZYJNYCH
PRZEZ ŁĄCZA RADIOWE O MAŁEJ PRZEPUSTOWOŚCI
Wojciech Zając
Instytut Informatyki i Elektroniki
Uniwersytet Zielonogórski
W artykule przedstawiono koncepcję praktycznej realizacji systemu transmisji danych wizyjnych
o podniesionych parametrach wydajności transmisji w warunkach przesyłu przez łącza radiowe o małej
przepustowości. Omówiono istotne cechy systemów podobnej klasy, zaprezentowano koncepcję realizacji
systemu z podziałem na warstwę transportową systemu i część programowego zapewnienia niezawodności
transmisji, omówiono metodykę badawczą, przedstawiono wyniki testów oraz zaprezentowano wnioski.
Wprowadzenie
Systemy transmisji danych wizyjnych wciąż zyskują na popularności. Rozwijają się obszary
ich stosowania, m.in. dzięki coraz częstszemu wykorzystaniu mediów radiowych, ale także
nowych form transmisji, jak np. wideokonferencje oparte o łącza GSM. Systemy takie oferują
także nowe możliwości, w postaci ulepszonych parametrów, takich jak rozdzielczość i głębia
barw. Dzięki opracowaniu nowych technik kodowania danych wizyjnych, opartych o techniki
analizy wielorozdzielczej (kodowanie falkowe) powstaje nowa jakość sygnału, o szeregu
korzystnych cech.
Odrębnym, lecz jednocześnie bardzo ważnym aspektem zapewniania odpowiedniej jakości
transmisji jest zapewnienie jej poprawności przy zachowaniu na poziomie minimalnym tzw.
nadmiarowości sygnału. Wspomnianą poprawność zapewnia się w rozwiązaniach
klasycznych przez stosowanie kodów autokorygujących, takich jak kody Hamminga i
podobne. Techniki te, choć skuteczne, charakteryzuje niekorzystny współczynnik ilości
niezbędnych do przesłania z sygnałem właściwym danych dodatkowych – nadmiarowych
względem informacji użytecznej. Konieczność poświęcenia np. 25% pasma transmisyjnego
na wspomniane dane nadmiarowe od szeregu lat jest motorem poszukiwań rozwiązań
alternatywnych.
Jedną ze skutecznych technik zwalczania zakłóceń transmisji bez konieczności stosowania
danych dodatkowych jest technika maskowania błędów. Polega ona na przyjęciu sygnału z
medium bez stosowania środków zapobiegających występowaniu błędów i podjęciu kroków
w celu eliminacji lub minimalizacji wpływu zakłóceń. Prezentowana w artykule metoda
wykorzystuje autorski system maskowania błędów transmisji.
2. Koncepcja systemu
2.1. Struktura systemu i przepływ sygnału
System transmisji składa się z oprogramowania zarządzającego, pracującego na komputerze
PC oraz dwóch modułów komunikacji radiowej: nadrzędnego, związanego z komputerem i
podrzędnego, odpowiedzialnego za pozycjonowanie kamery oraz pozyskanie i transmisję
obrazu. W systemie zastosowano uniwersalny miniaturowy moduł kamery C328R oraz dwa
mikro-serwomechanizmy Turnigy TG9. Łącze radiowe realizowane jest w oparciu o ultra-
259
XXI Sympozjum PTZE, Lubliniec 2011
energooszczędne zestawy radiowe Texas Instruments eZ430-RF2500T, zintegrowane z
mikrokontrolerem z rodziny MSP430 i układem radiowym CC2500.
Aplikacja sterująca wysyła do modułu nadrzędnego systemu polecenia pozycjonowania
kamery w dwóch płaszczyznach oraz wykonania ekspozycji. Uzyskany z przetwornika CCD
obraz przetwarzany jest przez moduł kamery do
Pozycjoner X
Aplikacja
postaci JPG i przesyłany do modułu
sterująca
podrzędnego. Moduł ten transmituje dane do
Pozycjoner Y
Moduł
Moduł
modułu nadrzędnego, z którego są one
nadrzędny
podrzędny
Moduł kamery
odbierane
przez
aplikację
sterującą,
Komputer
przetwarzane
w
celu
eliminacji
zakłóceń
Rys.PC1. Struktura systemu i przepływu sygnału
transmisji i wyświetlane. Łącze radiowe w
standardzie 2.4 GHz realizuje układ CC2500.
2.2. Oprogramowanie przetwarzające
Dane odebrane w postaci pliku JPG poddane są obróbce przez oprogramowanie
przetwarzające. Dokonuje ono rozkodowania składowych barw RGB do trzech tablic, z
których następnie są one pobierane i przetwarzane przez hybrydowy algorytm maskowania
błędów.
Hybrydowy algorytm maskowania błędów został zaprojektowany jako alternatywny stopień
dekorelacji danych obrazu, przetwarzanego z wykorzystaniem dyskretnej transformaty
kosinusowej (DCT). Zakłada on przetwarzanie obrazu w blokach o rozmiarze 8x8 danych, tak
jak realizuje to algorytm JPG.
Algorytm składa się z pięciu stopni przetwarzania. Na poszczególnych etapach przetwarzania
do analizy wykorzystany jest sygnał w postaci współczynników DCT (postać
częstotliwościowa) oraz tymczasowo odtworzony do postaci obrazu (postać przestrzenna).
Wykorzystane mechanizmy detekcji i maskowania zakłóceń transmisji operują na danych w
obu dziedzinach.
Pierwszym stopniem przetwarzania jest dolnoprzepustowa filtracja współczynników
wysokiego rzędu, które mogą wystąpić w odebranym sygnale, a nie powinny nieść
informacji. Drugi etap algorytmu dokonuje tymczasowego odtworzenia składowych barw
obrazu do postaci przestrzennej, następnie przeprowadzana jest analiza bloków danej
składowej obrazu w poszukiwaniu charakterystycznych przebiegów funkcji luminancji,
których obecność manifestuje wystąpienie zakłócenia. Lokalizacje wykrytych uszkodzeń
zapisywane są w tablicy błędów.
Trzeci etap algorytmu realizuje operację detekcji niepoprawnych wartości współczynników
DCT. Wykonywana jest operacja tzw. progowania współczynników, polegająca na
porównaniu wartości bezwzględnej różnicy danego współczynnika w danym bloku z
wartością średnią współczynników z bloków sąsiednich, o takich samych koordynatach
wewnątrzblokowych. Jeśli wartość różnicy przekracza próg dopuszczalny dla danego
położenia współczynnika w bloku, dany współczynnik uznawany jest za uszkodzony i jego
lokalizacja zapisywana jest w tablicy błędów.
Czwartym etapem jest operacja odtwarzania współczynników uznanych za uszkodzone, na
drodze uśrednienia wartości współczynników o takim samym położeniu w bloku,
nieoznaczonych, jako uszkodzone. Etap ostatni realizuje operację filtracji wygładzającej,
mającej za zadanie eliminację zakłóceń składowej stałej poszczególnych bloków.
Po zakończeniu operacji maskowania błędów obraz jest odtwarzany do właściwej postaci
wyjściowej.
260
XXI Sympozjum PTZE, Lubliniec 2011
3. Podsumowanie
Zaprojektowany system przebadano pod kątem wydajności maskowania w warunkach
transmisji z możliwością wystąpienia bitowych zakłóceń sygnału. Przeprowadzono testy
porównawcze dla serii obrazów i różnej stopy zakłóceń. Jakość sygnału oceniano miarą
matematyczną (współczynnik PSNR) oraz za pomocą testów subiektywnych (MOS), które są
trudniejsze w realizacji, lecz w przypadku technik maskowania zakłóceń są narzędziem
efektywniejszym.
Zastosowane rozwiązania wykazały możliwość realizacji wydajnej transmisji danych
wizyjnych w warunkach niskiej przepustowości łącza, braku celowości stosowania
retransmisji i jednocześnie zagrożenia wystąpieniem zakłóceń transmisji, prowadzących do
powstania błędów bitowych w przesyłanym strumieniu danych. Zastosowane rozwiązania
technik maskowania zakłóceń działają efektywnie, jednak wymagają stosowania specjalnego
oprogramowania na komputerze. Interesującym rozwinięciem systemu byłoby wyposażenie
go w sprzętowy moduł maskowania zakłóceń, realizowany np. w układzie FPGA.
261