ZESZYTY NAUKOWE WSOWL
Nr 4 (162) 2011
NAUKI SPOŁECZNE
Henryk ŁUKASIEWICZ
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO
ZASTOSOWANIA SIECI SENSORÓW BEZPRZEWODOWYCH
Problematyka wykorzystania urządzeń technicznych do monitorowania miejsc trudnodostępnych oraz miejsc, bądź rejonów zajętych przez przeciwnika była i jest jak najbardziej
aktualna. W ostatnich latach rola i znaczenie informacji zdobytej w czasie rzeczywistym bez
narażania żołnierzy jest znacząca. Rozwój nowoczesnych technologii związanych z budową
czujników dokonujących pomiaru określonych wielkości fizycznych oraz rozwój technologii
komunikacyjnych stały się przyczyną, dla której firmy telekomunikacyjne rozpoczęły prace związane z zaimplementowaniem nowoczesnych technologii zastosowania sensorów nie tylko dla
celów przemysłowych, ale też dla celów militarnych. Powyższa publikacja ma na celu przybliżenie czytelnikowi zagadnień związanych z zasadami funkcjonowania bezprzewodowych sieci
sensorów do zastosowań militarnych. Przedstawiono aspekty teoretyczne i praktyczne możliwości rozpoznawczych oraz wykorzystania poszczególnych rodzajów sensorów w wieloczujnikowej
sieci sensorów bezprzewodowych.
Słowa kluczowe: sensory, sieć sensorów bezprzewodowych, wojsko
Kolejnym etapem rozwoju bezprzewodowych lokalnych sieci komputerowych
WLAN jest sieć sensorów bezprzewodowych. Sieć ta jest jednym z elementów automatyzacji procesów rozpoznania i zdobywania przewagi informacyjnej oraz podejmowania
decyzji. Rozwój technologii budowy sieci komputerowych spowodował wzrost zainteresowania możliwością zastosowania sensorów w wielu dziedzinach życia. Obecnie
sensory wykorzystywane są m.in. do monitorowania:
ruchu ulicznego w poszczególnych częściach miasta;
-
-
-
-
-
WSTĘP
płk dr Henryk ŁUKASIEWICZ – Instytut Dowodzenia Wyższej Szkoły Oficerskiej Wojsk Lądowych
Henryk ŁUKASIEWICZ
stanu zabezpieczenia pomieszczeń, obiektów czy też określonych rejonów terenu;
stanu zajętości miejsc parkingowych na parkingach;
procesów technologicznych, w których obecność człowieka nie jest możliwa;
środowiska naturalnego pod względem np. zanieczyszczenia;
środowiska naturalnego w miejscach niedostępnych dla człowieka, np. badanie stopnia zmarzliny na biegunach.
Sensory, w zależności od zastosowania, różnią się nie tylko rodzajem czujnika
użytego do pomiaru określonej wielkości fizycznej, ale także wymiarami, zastosowanymi rozwiązaniami technologicznymi, sposobem zasilania i transmisji danych oraz
metodami zarządzania. Sensory wykorzystywane w przemyśle nie mogą być w sposób
bezpośredni zaimplementowane do celów wojskowych, ponieważ te do zastosowań
militarnych muszą spełniać szereg specyficznych wymagań takich jak: konieczność
uzyskania wysokich parametrów w zakresie wykrywania i identyfikacji obserwowanych
zjawisk, uzyskiwania dużych zasięgów transmisji, bezpieczeństwa elektromagnetycznego i informatycznego, konieczność długotrwałej pracy z baterii zasilającej oraz odpowiednia wytrzymałość mechaniczna. Aspekty bezpieczeństwa transmisji oraz komunikowania się sensorów przez sieć globalną GPS stanowią znaczący wyróżnik między
sensorami do zastosowań wojskowych a sensorami do zastosowań cywilnych.
Pierwsze sensory do zastosowań militarnych były wykorzystane w wojnie wietnamskiej przez armię Stanów Zjednoczonych. Działania tych pierwszych sensorów nie
były doskonałe, np. wpływ roślinności i innych elementów otoczenia powodował fałszywe alarmy, dlatego do danych z sensorów podchodzono z dużą rezerwą. W następnych latach zaczęto udoskonalać budowę sensorów, czyniąc z nich coraz lepszy element
rozpoznania przeciwnika na polu walki. Obecnie sensory stosowane są we wszystkich
rodzajach wojsk, a każdy z nich wykorzystuje różne typy czujników pomiarowych.
1. TEORETYCZNE ASPEKTY FUNKCJONOWANIA BEZPRZEWODOWYCH
SIECI SENSORÓW DO ZASTOSOWAŃ MILITARNYCH
We współczesnych działaniach z użyciem wojsk ważną rolę odgrywają zbierane
w sposób automatyczny informacje i dane z trudno dostępnych oraz niebezpiecznych
dla żołnierzy obszarów lub obiektów i przesyłane w krótkim czasie do odległych stanowisk dowodzenia znajdujących się na lądzie, morzu i w powietrzu.
W przypadku militarnego zastosowania pojedyncze sensory, podobnie jak pojedyncze komputery nie spełniałyby pokładanych w nich nadziei. Dopiero połączenie
sensorów w sieć pozwala na pełne wykorzystanie możliwości technicznych pojedynczych sensorów jako elementów składowych sieci sensorów.
-
-
-
-
-
Sensory łączone w sieć za pomocą linii przewodowych mogą być wykorzystywane do ochrony obiektów stałych, natomiast pełne wykorzystanie sensorów do zastosowań militarnych umożliwia sieć bezprzewodowa.
Bezprzewodowe sieci sensorów składają się z różnego rodzaju sensorów rozmieszczonych w terenie. Poszczególne sensory pracujące w sieci sensorów bezprzewodowych różnią się rodzajem zastosowanego czujnika (sieć sensorów wieloczujnikowych). Każdy z tych sensorów dokonuje pomiaru określonych wartości fizycznych, do
8
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
których został zbudowany. Wyniki pomiarów zostają przesłane drogą bezprzewodową
do centrum zarządzania i zobrazowane na stanowisku dowodzenia. Wieloczujnikowa
sieć bezprzewodowa powinna być zbudowana w oparciu o sensory zawierające:
czujnik akustyczny (dźwięku);
czujnik sejsmiczny (wibracyjny);
czujnik magnetyczny (ruch elementów metalowych);
czujnik optyczny (kamera);
czujnik pasywny podczerwieni (ruchu);
blok czujników kontrolujących parametry środowiska (wilgotność, pora dnia,
siła i kierunek wiatru, temperatura). Parametry te są wielkościami pomocniczymi do rozpoznania obiektów – kierunku nadchodzenia dźwięku.
Bez względu na rodzaj mierzonej wielkości fizycznej, każdy z sensorów powinien zawierać czujniki parametrów środowiska, m.in. czujnik wiatru, temperatury, wilgotności.
W zależności od przeznaczenia w bezprzewodowej sieci sensorów wyróżnić należy następujące rodzaje sensorów:
sensor wartownik – (nazwa spotykana w dostępnej literaturze – sensor podstawowy, sensor końcowy, węzeł końcowy) jest podstawowym sensorem
najbardziej wysuniętym w penetrowany obszar;
sensor bazowy – (nazwa spotykana w dostępnej literaturze – sensor brama)
jest elementem zbierającym strumienie danych od poszczególnych sensorów.
Zapewnia szereg interfejsów wyjściowych do urządzeń transmisyjnych na
większe odległości oraz do osób znajdujących się w pobliżu sieci korzystających z danych napływających z sensorów. Powinien być wyposażony w interfejsy do dołączenia urządzeń radiowych do łączności ze stanowiskiem dowodzenia;
sensor rozpoznawczy – zawiera czujnik optyczny, czujnik magnetyczny,
kompas, moduł GPS, czujniki środowiskowe (temperatury, siły wiatru, wilgotności). Ma za zadanie pozyskanie obrazu obszaru, na którym inne sensory
wykryły określone zjawiska. Sensor ten powinien być umieszczany w miejscach zapewniających dobrą widoczność terenu;
sensor retransmisyjny (nazwa spotykana w dostępnej literaturze – sensor
przekaźnikowy, brama inteligentna (stosowana przez firmę Harris).
Sensor bazowy posiada wyjścia typu Ethernet i USB, do których można dołączyć drogą przewodową serwery stanowiska dowodzenia, kierowania bądź nadzoru lub
drogą bezprzewodową poprzez system polowej łączności bezprzewodowej. Możliwe
jest również dołączenie tej sieci drogą bezprzewodową do przenośnego komputera typu
laptop znajdującego się w pewnej odległości od sieciowej stacji bazowej, a także połączenie sieci czujników ze stanowiskiem kierowania umieszczonym na pojeździe będą-
-
-
-
-
-
Zadaniem sensora wartownika jest wykrycie zjawiska lub obiektu oraz wzbudzenie innych sensorów w sieci w celu dalszej analizy, rozpoznania, monitorowania
i przesyłania danych o wykryciu do stanowiska dowodzenia.
9
Henryk ŁUKASIEWICZ
cym w ruchu, poprzez system łączności bezprzewodowej zaimplementowany w pojeździe.
Sensory retransmisyjne stosuje się w celu zwiększenia zasięgu komunikacyjnego
pomiędzy sensorami.
Wszystkie czujniki powinny być wyposażone w urządzenia do komunikacji pomiędzy sobą oraz w gniazda do dołączenia tych czujników, które muszą pracować poza
obudową sensora np. mikrofony, czujniki sejsmiczne.
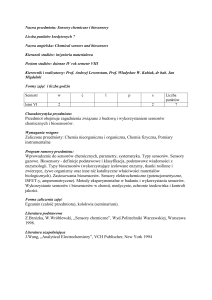
Wariant struktury sieci sensorów bezprzewodowych przedstawiono na rysunku 1.
rejon rozwinięcia SD
Legenda:
zasięg sensora
sensor wartownik
relacje bezpośrednie
relacje pośrednie
sensor bazowy
Rys. 1. Sieć sensorów bezprzewodowych „ad – hoc”
Źródło: Opracowanie własne
Sensory powinny pracować w ramach samoczynnie konfigurującej się sieci (alternatywnie powinny posiadać możliwość konfiguracji sieci przez zdalnego operatora)
z automatycznym wykrywaniem i identyfikowaniem obiektów na monitorowanym obszarze działań lub w obiektach podlegających obserwacji i nadzorowi. W przypadku
awarii jednego z sensorów sieć powinna automatycznie przejść do rekonfiguracji, tak
-
-
-
-
-
Informacje w przedstawionej sieci sensorów będą przekazywane od sensorów
wartowników do sensora bazowego z wykorzystaniem relacji bezpośrednich, a w przypadku braku łączności mogą być wykorzystane relacje pośrednie. Sensor bazowy jest
elementem pośrednim pomiędzy siecią a stanowiskiem dowodzenia.
10
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
aby była zdolna do przesyłania informacji z czujników oraz do zdalnego przekonfigurowania. Sensory powinny automatycznie routować między sobą informacje.
Ze względu na oszczędność zasilania sensorów, sieć powinna przechodzić samoczynnie w stan „uśpienia”. Po wykryciu zdarzenia sieć samoczynnie powinna budzić
się z „uśpienia”.
Sieć sensorów powinna pracować w „uśpieniu” z minimalnym poborem mocy.
Czujnikami budzącymi sensory i sieć do działania rozpoznawczego są:
wbudowany w obudowę sensora czuły czujnik akustyczny;
zewnętrzny czujnik sejsmiczny;
zewnętrzny czujnik magnetyczny;
zewnętrzny czujnik pasywny promieniowania podczerwonego PIR.
Wszystkie czujniki mogą działać jednocześnie, tylko niektóre z nich mogą być
użyte do budzenia sensorów. Po wykryciu obiektu (zdarzenia) sieć samoczynnie monitoruje obiekt, gromadzi informacje o niezidentyfikowanym obiekcie i przesyła dane na
SD w formie krótkich impulsowych informacji. W pierwszym etapie powinna być przesyłana informacja na SD o wykryciu niezidentyfikowanego obiektu, zobrazowana na
ekranie komputera na cyfrowej mapie monitorowanego obszaru. Po zbliżeniu się monitorowanego obiektu do sieci sensorów, automatycznie dokonuje ona identyfikacji (rodzaju/typu) obiektu. Identyfikacja (analiza i porównanie) powinna być realizowana automatycznie w oparciu o uprzednio opracowaną, na podstawie przeprowadzonych badań, bibliotekę sygnatur poszczególnych obiektów z uwzględnieniem warunków środowiskowych. Wyniki obserwacji powinny być zobrazowane na stanowisku dowodzenia, na cyfrowej mapie monitorowanego obszaru w postaci ikony konkretnego obiektu
z krótką charakterystyką uwzględniającą kierunek przemieszczania się obiektu, prędkość oraz odległość obiektu od sensora. Nie można wykluczyć możliwości przesłania
bezpośredniego obrazu z monitorowanego obszaru i wyświetlenia go na ekranie komputera, bądź innym urządzeniu multimedialnym.
Prawdopodobieństwo zidentyfikowania celu powinno być wyższe niż prawdopodobieństwo identyfikacji celu. Powyższe prawdopodobieństwa są uzależnione od
warunków terenowych, w których sensory będą wykorzystane.
Bezprzewodowa sieć sensorów powinna zidentyfikować i określić nw. grupy
obiektów:
pojedynczy żołnierz (grupa żołnierzy);
strzał z pistoletu bądź karabinka;
samochód osobowo – terenowy/samochód ciężarowy o tonażu do 5 ton;
samochód ciężarowy o tonażu do 10 ton/kołowy transporter opancerzony;
czołg bądź gąsienicowy transporter opancerzony;
helikopter.
-
-
-
-
-
Sieć powinna posiadać możliwość jednoczesnego monitorowania kilku obiektów. Operator na SD powinien móc nadawać priorytet poszczególnym obiektom w zakresie ich identyfikacji oraz monitorować stan poszczególnych sensorów i całej sieci.
11
Henryk ŁUKASIEWICZ
Rys. 2. Sensory z wieloma rodzajami czujników w obudowie zabezpieczającej przed niszczącymi wpływami otoczenia
Źródło: M. Dras, Wprowadzenie do tematyki sensorów i sieci sensorów bezprzewodowych do
zastosowań wojskowych, prezentacja, Wrocław 2008
-
-
-
-
-
2. FUNKCJE REALIZOWANE PRZEZ SENSORY
Do podstawowych funkcji realizowanych przez sensory możemy zaliczyć:
wykrywanie obecności przedmiotów metalowych (np. poruszający się żołnierz z bronią) – czujniki magnetyczne;
wykrywanie osób – pasywne czujniki podczerwieni;
wykrywanie dźwięku – czujniki akustyczne;
wykrywanie drgań podłoża – czujniki sejsmiczne (wibracyjne);
wykrywanie ruchu samego sensora;
monitorowanie wizyjne określonego obszaru (kamera) – czujniki optyczne;
automatyczna identyfikacja wykrytych obiektów lub zjawisk (ruchomych
i nieruchomych) w oparciu o sygnatury akustyczne bądź obrazy;
automatyczna lokalizacja położenia poszczególnych sensorów przez wbudowane
moduły GPS i kompasy elektroniczne oraz przesyłanie tych danych na SD;
przesyłanie zgromadzonych i przetworzonych danych przez sensory na stanowisko dowodzenia (SD);
możliwość zdalnej konfiguracji sensora oraz zdalnego odczytu bieżącego stanu sensora;
możliwość nadawania priorytetu poszczególnym wykrytym obiektom w zakresie ich identyfikacji.
W tym zakresie możemy rozpatrywać następujące opcje sensorów:
zintegrowane, posiadające na swoim wyposażeniu kilka rodzajów czujników;
modułowe, z możliwością konfiguracji czujników przez użytkownika w zależności od potrzeb poprzez dołączenie do sensora odpowiednich czujników.
Sensor zintegrowany zawiera możliwie dużą liczbę czujników wewnątrz swojej
obudowy. Rozwiązanie to ma tę zaletę, że jest łatwe do rozłożenia, ale niestety posiada
też bardzo istotne wady polegające na tym, że poszczególne czujniki, by mogły efektywnie wykrywać różne zjawiska, wymagają indywidualnego ustawienia, np. czujnik
PIR musi obserwować obszar, a czujnik sejsmiczny musi być wbity w ziemię.
Wariant sensora z wieloma rodzajami czujników przedstawiono na rysunku 2.
12
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
W przypadku sensora modułowego budowane są różne wersje sensorów z odpowiednimi czujnikami, są to:
sensor wartownik zawierający wewnętrzny „budzący” czujnik, np. akustyczny, wewnętrzne czujniki środowiskowe (temperatury, siły wiatru, wilgotności, kompas) oraz dołączany w miarę potrzeb zewnętrzny czujnik magnetyczny (sejsmiczny, podczerwieni bądź optyczny);
sensor bazowy wyposażony w wewnętrzne czujniki środowiskowe oraz dowolny czujnik, np. akustyczny. Do ww. sensora istnieje możliwość podłączenia oprócz zewnętrznych czujników np. magnetycznych, sejsmicznych, dodatkowego modułu GPS i bloku interfejsów komunikacyjnych wyjściowych;
sensory retransmisyjne, przekaźnikowe, bramy inteligentne (firma Harris) itp.
rodzaje sensorów.
Wariant sensora modułowego przedstawiono na rysunku 3.
Rys. 3. Sensor modułowy z czujnikami akustycznymi w obudowie zabezpieczającej przed niszczącymi wpływami otoczenia
Źródło: M. Dras, Wprowadzenie do tematyki sensorów i sieci sensorów bezprzewodowych do
zastosowań wojskowych, prezentacja, Wrocław 2008
-
Źródło: M. Dras, Wprowadzenie do tematyki sensorów i sieci sensorów bezprzewodowych do
zastosowań wojskowych, prezentacja, Wrocław 2008
-
-
Rys. 4. Warianty wybranych konstrukcji sensorów z zewnętrznymi czujnikami
-
-
Producenci wybierają rozwiązania pośrednie, w których część czujników jest na
stałe zabudowana wewnątrz sensora, a czujniki, które wymagają indywidualnego ustawiania będą dołączane wg potrzeb poprzez złącza i mocowane na zewnątrz obudowy sensora lub w jego pobliżu. Z przeglądu literatury wynika, że jest to najczęściej stosowane
rozwiązanie. Sensory mogą także pracować bez czujników zewnętrznych, jednakże ich
działanie klasyfikujące zjawiska będzie bardzo ograniczone. Warianty wybranych konstrukcji sensorów z dołączanymi zewnętrznymi czujnikami przedstawiono na rysunku 4.
13
Henryk ŁUKASIEWICZ
Przekaz obrazu do SD odbywa się tylko na sygnał operatora z SD (przekaz
skompresowany). Urządzenie posiada możliwość określenia położenia, kierunku i prędkości monitorowanego obiektu oraz odległości obiektu od sensora. Możliwa jest również zmiana konfiguracji sieci z SD. Wymiana informacji pomiędzy sensorami oraz
w relacji sensor bazowy – SD ma postać transmisji danych z utajnieniem.
3. SPOSOBY ROZMIESZCZANIA SENSORÓW W TERENIE
Rozmieszczenie sensorów w terenie może odbywać się poprzez:
instalowanie precyzyjne (sposób ręczny);
rozrzucanie dużej liczby sensorów na danym obszarze działań przy wykorzystaniu samolotów lub środków artyleryjskich (ad – hoc);
umieszczanie sensorów na obiektach mobilnych.
W przypadku rozmieszczania sensorów sposobem ręcznym, sensory są ustawiane w określonym rejonie przez pojedynczych żołnierzy. W takim przypadku sensory do
rejonu rozmieszczenia będą dostarczane pojazdem bądź przenoszone w specjalnych
pojemnikach przez żołnierzy. Ważnym parametrem poza możliwościami technicznymi
oraz ilością sensorów są ich gabaryty i sposób transportu. Sposób rozmieszczania sensorów w terenie sposobem ręcznym przedstawiono na rysunku 5.
Rys. 5. Rozmieszczanie sensorów sposobem ręcznym
Źródło: M. Peck, Embedded Intelligence, Training tools let soldiers manage info collection on
real thing, Training&Simulation Journal, August/September 2008
Sensory zrzucane z samolotów bądź rozrzucane przy wykorzystaniu środków artyleryjskich muszą być zbudowane z materiałów odpornych na uderzenia. Sposób konfiguracji sieci, zasilania, nadzorowania oraz zastosowane metody transmisji muszą zapewnić niezawodność działania sieci. Sposób rozmieszczania sensorów z samolotu
przedstawiono na rysunku 6.
-
Sensor węzłowy
-
-
-
-
Sensor
Rys. 6. Rozmieszczanie sensorów przy wykorzystaniu samolotu
Źródło: M. Dras, Wprowadzenie do tematyki sensorów i sieci sensorów bezprzewodowych do
zastosowań wojskowych, Wrocław 2008
14
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Montaż sensorów na pojazdach jest powszechnie stosowany w szczególności do
monitorowania np. stężenia środków chemicznych, promieniotwórczych, właściwości
fizycznych. Sensory montowane na pojazdach, ze względu na sposób ich wykorzystania
oraz rodzaj mierzonych parametrów pod względem budowy i montażu, dostosowane są
do danego typu pojazdu. Sposób rozmieszczania sensorów na wieży czołgowej przedstawiono na rysunku 7.
Rys. 7. Wariant rozmieszczenia sensorów na wieży czołgowej
Źródło: Materiały ogólnodostępne firmy Bumar
4. ROZMIAR SIECI
Ze względu na ilość czynnych elementów w sieci bezprzewodowej, przyjmuje się,
że liczba sensorów pracujących w bezprzewodowej sieci sensorów nie powinna przekraczać 100 sensorów, a powierzchnia nadzorowanego rejonu1 ok. 5 – 20 km2 Zasięg łączności pomiędzy sensorami zależy od warunków terenowych, mocy nadajnika oraz wysokości umieszczenia sensora nad ziemią. Na podstawie dostępnych materiałów możemy
przyjąć, że zasięg łączności pomiędzy sensorami wynosi ok. 250 – 500 m (max. 1 km)
przy założeniu, że sensory umieszczono w terenie niezarośniętym, płaskim lub o średnim
pofałdowaniu, z sensorami leżącymi na ziemi bądź bezpośrednio nad ziemią. Zasięg komunikacyjny pomiędzy sensorami bazowymi może zostać zwiększony do odległości 1 –
3 km, przez zwiększenie mocy nadawania. Zwiększenie mocy nadajnika skraca czas pracy baterii (szybsze wyładowanie). Innym rozwiązaniem zwiększającym zasięg jest podniesienie sensorów ponad poziom gruntu (1 – 3 m) lub umieszczenie dodatkowych sensorów między sensorem bazowym i siecią, pełniących rolę przekaźników routujących (odległości między nimi mogą wynosić do 300 m). Sposób zwiększenia zasięgu przy wykorzystaniu bramy inteligentnej RF 5400V-SR firmy Harris przedstawiono na rysunku 8.
Większe odległości można uzyskać przez umieszczenie na danym obszarze
większej liczby sensorów, przy czym sensory te mogą nie mieć zainstalowanych przetworników wielkości fizycznej i mogą działać tylko jako przekaźniki danych.
Zasadniczym wymogiem w zakresie łączności pomiędzy siecią sensorów a użytkownikiem, oprócz zbierania i przetwarzania informacji przez sieć sensorów, jest przekazywanie zebranych informacji przez system zarówno do elementów stanowiska do-
-
-
5. KOMUNIKACJA W SIECI
-
-
-
1
M. Winkler, K. Tuchs, K. Hughes, G. Baraclay, Theoretical and practical aspects of military wireless
sensor networks, [w:] “Journal of Telecommunications and Information Technology”, nr 2/2008.
15
Henryk ŁUKASIEWICZ
wodzenia odpowiedzialnych za zbieranie, przetwarzanie (w tym agregację) i zobrazowanie informacji, jak i do pojedynczych odbiorców (żołnierzy) na polu walki z wykorzystaniem protokołu IP. Wynika stąd konieczność zapewnienia informacji każdemu,
kto posiada dostęp do sieci łączności.
b)
RF-5400V-SR
RF-5400V-SR
RF-5405VH-GW
brama
inteligentna
RF-5408 RI
RF-5408 RI
RF-5400VH-RU8
RI
FALCON II VHF
RF5800V MP
RF-5410 APLIKACJA
Rys.8. Wariant wykorzystania bramy inteligentnej RF 5400V-SR firmy Harris
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www.harris.com.
Sieć sensorów powinna zostać spięta w sieci IP dowolnym środkiem łączności
będącym na wyposażeniu WP. W tym celu wymagane jest zapewnienie połączenia zarówno poprzez radiostację pola walki, jak i poprzez środki łączności Wi-Fi pracujące
w wojskowym paśmie częstotliwości w trybie rozsiewczym bądź kierunkowym 2.
Projektując podsystem zarządzania siecią sensorów, należy wziąć pod uwagę
konieczność optymalizacji wykorzystania dostępnego pasma oraz wymóg zachowania
bezpieczeństwa komunikacji (comsec). W celu zapewnienia poufności transmitowanych
danych komunikacja pomiędzy sensorami powinna być utajniona i realizowana z określoną szybkością transmisji w paśmie niewykrywalnym dla urządzeń namierzających
i wykrywających. Komunikacja w relacji: sensor bazowy – SD powinna być realizowana w oparciu o aktualnie eksploatowane radiostacje pola walki zakresu UKF.
-
-
Komunikacja w kierunku do sieci sensorów powinna umożliwić wysyłanie przez
operatora zapytań dotyczących:
stanu poszczególnych sensorów;
stanu czujników;
informacji, który sensor zidentyfikował obiekt.
-
-
-
2
16
H. Łukasiewicz, Tendencje rozwojowe i możliwości wykorzystania sensorów i sieci sensorów do celów wojskowych, [w:] „Zeszyty Naukowe WSOWL”, nr 2/2011(160), Wrocław 2011.
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Przy budowie sieci sensorów bezprzewodowych należy uwzględnić komunikację pomiędzy sensorami z minimalnie niezbędną mocą wyjściową (uwzględnić samoadaptacyjność mocy wyjściowej nadajnika w stosunku do zasięgu transmisji). Powyższa
transmisja winna być kodowana i odporna na zakłócenia i podsłuch. Transmisja musi
odbywać się impulsowo ze skokową zmianą czasu nadawania oraz automatyczną korekcją błędów. Wskazane byłoby przesyłanie poszczególnych „porcji” informacji zaszyfrowanych różnymi kodami. Ze względu na stosowanie sensorów w terenie zajętym
przez przeciwnika, należy uwzględnić taki sposób szyfrowania, by w przypadku zdobycia przez stronę przeciwną egzemplarza sensora, nie był on w stanie rozszyfrować pracy
pozostałych sieci. Należy przewidzieć możliwość sygnalizacji na SD zmiany położenia
sensora (np. w przypadku zdobycia go przez przeciwnika) i podjęcia decyzji o jego wyłączeniu. Przejęty przez przeciwnika sensor powinien być zabezpieczony przed skopiowaniem systemu operacyjnego, rozpoznaniem systemu kodowania i przesyłania informacji oraz wprowadzeniem dezinformacji w pracy sieci.
6. ZASILANIE I CZAS PRACY SENSORÓW
Zasilanie sensorów odbywa się z wewnętrznej baterii lub akumulatorów. Czas
pracy sensora wartownika, rozpoznawczego i bazowego powinien wynosić min. 14 dni
w zależności od stosunku czuwanie/nadawanie. Źródłem zasilania mogą być baterie
ogólnodostępne na rynku z tym, że zalecane są inne baterie niż najbardziej popularne
cynkowo – alkaliczne, gdyż ten rodzaj baterii ma stosunkowo małą pojemność, znacznie malejącą w niskich temperaturach. Przewiduje się stosowanie akumulatorów jonowo – litowych lub podobnych umożliwiających wielokrotne ładowanie, co może być
korzystne w przypadku ćwiczeń poligonowych i szkoleń. Sensory muszą mieć wbudowaną możliwość zdalnego określania poziomu stanu naładowania baterii. Podczas analizy sposobu zasilania sensorów należy wziąć pod uwagę także możliwość wykorzystania baterii słonecznych.
7. MOŻLIWOŚCI ROZPOZNAWCZE I TRANSMISYJNE SENSORÓW PRODUKOWANYCH DO POTRZEB ZASTOSOWAŃ WOJSKOWYCH
-
Na rynku dostępne są bardzo ograniczone informacje techniczne o sensorach do
zastosowań wojskowych. Oferowane przez producentów zagranicznych rozwiązania
sensorów do zastosowań wojskowych oparte są o ich własne standardy transmisji między sensorami lub o stare wersje powszechnych standardów np. Wi – Fi. Połączenia
tych sensorów ze stanowiskami dowodzenia często nie są oparte o standardy z protokołem IP. W informacjach technicznych dotyczących tych wyrobów nie wspomina się
o dostępności baz sygnatur akustycznych różnych obiektów. Systemy operacyjne sensorów są rozwiązaniami specjalnymi. Nie wszyscy producenci podają pasma częstotliwości współpracy i komunikacji z sensorami. Przedstawione poniżej parametry taktyczno
– techniczne wybranych sensorów opracowano na podstawie materiałów udostępnionych w postaci artykułów w specjalistycznych periodykach, na stronach internetowych
poszczególnych firm oraz na podstawie kart katalogowych sensorów. Z tego powodu
przedstawione dane mogą być obarczone błędami lub niekompletne.
-
-
-
-
7.1. BAE Systems Ltd. (USA)- 6500 Tracor Lane, Austin, TX 78725
Produktem firmy BAE Systems jest system SAS (Situational Awareness Sensor), który zapewnia przesyłanie w czasie rzeczywistym informacji o sytuacji w terenie
nadzorowanym przez sieć sensorów. System ten charakteryzuje się dużym prawdopo17
Henryk ŁUKASIEWICZ
dobieństwem detekcji i identyfikacji, zapewniającym generowanie minimum fałszywych alarmów bez udziału człowieka. System SAS składa się z rozproszonych w terenie (w terenie zurbanizowanym również) sensorów przeznaczonych do detekcji, identyfikacji, nagrywania i przesyłania różnych zagrożeń występujących na monitorowanym
obszarze. Dane rozpoznawcze przesyłane są do centrum dowodzenia poprzez sieć bezprzewodową. System SAS składa się z dwóch zasadniczych komponentów: aplikacji
i sensorów. Wykorzystuje się w nim sensory akustyczne, sejsmiczne, optyczne, mikroradar oraz sensory do wykrywania zagrożeń chemicznych. Powyższe sensory wykrywają hałas spowodowany przemieszczaniem się z określoną prędkością osób poprzez detekcję i identyfikację kroków oraz hałas spowodowany przez pracujące silniki spalinowe i wibracje terenu. Możliwości taktyczno-techniczne powyższych sensorów nie są
udostępnione w ogólnie dostępnych materiałach. Sensor produkowany przez firmę BAE
Systems przedstawiono na rysunku 9.
Rys. 9. Wieloczujnikowy sensor firmy BAE Systems
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. baesystems.com
7.2. TRIDENT SYSTEMS (USA) – 201 Lowell Street, Wilmington, MA01887 USA
-
-
-
-
-
Bezprzewodowe naziemne sensory produkowane przez firmę TRIDENT
SYSTEMS zapewniają dokładne rozpoznanie i umiejscowienie w terenie działań przeciwnika. Sensory są odporne na warunki terenowe, ustawienie ich w terenie jest łatwe
i szybkie, zapewniają długoterminową bezobsługową pracę. Mogą być połączone z kamerą, detektorami akustycznymi, sejsmicznymi oraz innymi detektorami, np. magnetycznymi, chemicznymi. Do komunikacji wykorzystuje się standard UWB (UltraWideband) z zastosowaniem systemu zabezpieczenia transmisji. Ogólny wygląd ww.
sensorów przedstawiono na rysunku 10, natomiast podstawowe parametry sensorów
typu: wartownik, sensor nocny oraz rozpoznawczy przedstawiono w tabeli 1.
18
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Rys. 10. Ogólny widok sensorów firmy Trident Systems
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. tridsys.com
Tabela 1. Podstawowe parametry sensora wartownika, sensora nocnego oraz rozpoznawczego
Sensor wartownik
Sensor nocny
szybkość
transmisji
max. 250 Kb/s
standard 50 Kb/s
9,6 – 115,2 Kb/s
zasięg
do 300 m
a) 2 km w terenie otwartym;
b) 500 m w terenie pofałdowanym
do 200 m
utajnienie
transmisji
tak
tak
tak
Sensor podstawowy
zawiera GPS detektor
ruchu, dodatkowo można podłączyć kamerę
(dzień i noc), detektor
akustyczny, sejsmiczny
i magnetyczny
do 90 dni w zależności
od cyklu praca/czuwanie
bateria AA standardowa
(opcjonalnie bateria słoneczna)
Sensor podstawowy
zawiera GPS detektor
ruchu, dodatkowo można podłączyć kamerę
(dzień i noc), detektor
akustyczny, sejsmiczny
i magnetyczny
do 120 dni w zależności
od cyklu praca/czuwanie
Sensor podstawowy
zawiera GPS detektor
ruchu, dodatkowo można podłączyć kamerę
(dzień i noc), detektor
akustyczny, sejsmiczny
i magnetyczny
do 15 dni w zależności
od cyklu praca/czuwanie
ogniwa D (opcjonalnie
bateria słoneczna)
ogniwa D (opcjonalnie
bateria słoneczna)
-30-60°C
-30-60°C
-30-60°C
0,62 kg
1,53 kg
1,36 kg
typ
detektorów
żywotność
baterii
-
zasilanie
-
Sensor
rozpoznawczy
Standard 5Mb/s
1Mb/s przy obniżonym
zasilaniu
Parametr
temperatura
pracy
waga
-
-
-
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. tridsys.com
19
Henryk ŁUKASIEWICZ
7.3. TEXTRON Defense Systems (USA) – 201 Lowell Street, Wilmington,
MA01887 USA
Firma Textron wykorzystuje zaawansowane technologie oraz aplikacje do zapewnienia wymiany informacji pomiędzy żołnierzami a platformami uzbrojenia i sensorami. System sensorów zapewnia detekcję, klasyfikację, lokalizację oraz położenie pojazdów, osób, środków powietrznych oraz parametrów środowiska. Wśród produktów
tej firmy, oprócz systemów pola walki (IMS, CSS, Spiker), systemów laserowych, możemy wyróżnić następujące rodzaje sensorów:
FCS T-UGS (Tactical – Unattended Ground Sensors);
FCS U-UGS (Urban – Unattended Ground Sensors);
Terrain Commander;
Terrain Commander 2;
AADS (Advanced Air Delivered Sensor).
Program dotyczący prac związanych z rozwojem sensorów dla potrzeb sił zbrojnych firma Textron prowadzi w dwóch równoległych płaszczyznach: sensory do zastosowań taktycznych (T) oraz sensory do zastosowań w terenie zabudowanym (U). Płaszczyzna dotycząca zastosowań taktycznych (T-UGS) – zakłada się, że sensory będą rozmieszczane w terenie poprzez zrzucanie z samolotów i śmigłowców, w celu identyfikacji pojazdów opancerzonych i osobowo-terenowych oraz ludzi.
Sensory T-UGS mogą być używane w różnych konfiguracjach. Wśród gamy
sensorów FCS U-UGS wyróżniamy:
U-UGS Gateway Node, przeznaczony do odbioru sygnałów z poszczególnych
sensorów i przesyłania ich do operatora na stanowisku dowodzenia w czasie
rzeczywistym.
U-UGS Intrusion Sensor Node, przeznaczony do wykorzystania w budynkach, terenie zabudowanym, miejscach zakrytych i tunelach.
U-UGS Imaging Sensor Node, przeznaczony do przekazywania obrazów
w dzień i w nocy w postaci cyfrowej poprzez bramkę do operatora.
Sensory T-UGS oraz U-UGS przedstawiono na rysunku 11.
-
-
-
-
-
Sensory do zastosowań taktycznych umożliwiają detekcję i klasyfikację pojazdów w terenie oraz identyfikację osób. Zebrane dane są przesyłane w czasie rzeczywistym do centrum dowodzenia. Wśród gamy sensorów FCS T-UGS wyróżniamy:
T-UGS ISR Sensor Node, przeznaczony do detekcji pojazdów, osób oraz
środków powietrznych;
T-UGS Gateway Node, przeznaczony do odbioru sygnałów z poszczególnych
sensorów i przesyłania ich do operatora w czasie rzeczywistym;
T-UGS Elektro Optic/IR Node, przeznaczony do przekazywania obrazów
w dzień i w nocy w postaci cyfrowej poprzez bramkę do operatora;
Radiological Nuclear (RN) Node, przeznaczony do pomiaru i raportowania
promieniowania gamma i skażenia środowiska.
20
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Rys. 11. Sensory T-UGS oraz U-UGS
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. textrondefense.com
Zintegrowane sensory OASIS2 (Optical Acoustic Samcom Integrated Sensor)
stanowią zasadniczy element systemu Terrain Commander 2. Umożliwiają współpracę
z sensorami (sejsmicznymi, magnetycznymi, optycznymi, piezoelektrycznymi) rozmieszczonymi w terenie i przesyłanie danych do odległego stanowiska dowodzenia w czasie
rzeczywistym. Wariant wykorzystania OASIS2 w terenie przedstawiono na rysunku 12.
Rys. 12. Sensory wieloczujnikowe oraz współpracująca z nimi sieć sensorów połączone przez
satelitę ze stanowiskiem dowodzenia
-
-
-
-
-
Źródło: M. Dras, Sensory i sieci bezprzewodowych sensorów do zastosowań wojskowych, referat na sympozjum naukowe nt. „Organa kierowania polowym węzłem łączności SD BZ/BPanc”
WSOWL, Wrocław 2008
Podstawowe parametry OASIS2:
a) zasięg rozpoznania optycznego:
pojazdy – detekcja 500 – 1500 m;
osoby – detekcja 150 – 500 m;
b) zasięg rozpoznania akustycznego:
lekkie pojazdy samochodowe 500 m;
czołgi 2500 m;
helikopter 10000 m;
21
Henryk ŁUKASIEWICZ
c) trwałość baterii – 30 dni.
AADS (Advanced Air Delivered Sensor) wykorzystują sejsmiczne i akustyczne
sensory (UGS). Używane są w armii USA, w szczególności w U.S. Marine Corps do
zwiększenia zdolności rozpoznania mobilności sił przeciwnika, poprzez detekcję i klasyfikację wykrytych zagrożeń, wykorzystując do tego celu sejsmiczne i akustyczne sensory (UGS), a następnie reakcję na monitorowane czynności przeciwnika w czasie rzeczywistym. Sensory AADS do łączności z odległym stanowiskiem dowodzenia wykorzystują system SATCOM bądź komunikują się poprzez środki powietrzne znajdujące
się nad monitorowanym terenem. Na rysunku 13 przedstawiono sposób wymiany informacji rozpoznawczych w przypadku wykorzystywania środków powietrznych znajdujących się nad monitorowanym obszarem bądź z wykorzystaniem satelitów.
Rys. 13. Komunikacja sensorów AADS z odległym stanowiskiem dowodzenia przy wykorzystaniu systemu SATCOM bądź środków powietrznych znajdujących się nad monitorowanym
terenem
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. textrondefense.com
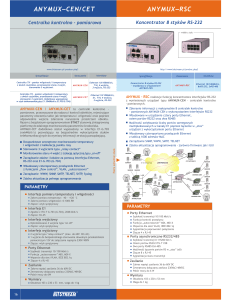
7.4. HARRIS assuredcommunications (USA) - RF Communications, 1680 University Ave, Rochester, NY USA 14610
-
-
-
-
-
Firma Harris produkuje detektory akustyczne, magnetyczne, sejsmiczne oraz
optyczne (RF-5408 RI) przeznaczone do detekcji poruszających się w pobliżu pojazdów
oraz osób, m.in.12047-371X detektor sejsmiczny, 12047-372X detektor magnetyczny,
12047-373X detektor PIR, bramy (przekaźniki) dostępowe np. RF-5400VX-MS Multi
Sensor, RF-5400VX-SS Mini-Sensor, RF-5400VH-AS, RF-5400V-SR, RF-5400VHRU, bramy inteligentne RF-5405VH-GW. Współpracuje z radiostacjami serii FALCON
II, wykorzystywana aplikacja to RF-5410, sytuacja zobrazowana jest na cyfrowej mapie. Podstawowe parametry techniczne kamery oraz bram dostępowych stosowanych
w systemie FALCON WATCH przedstawiono w tabeli 2.
22
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Tabela 2. Podstawowe parametry techniczne kamery oraz bram dostępowych stosowanych w systemie FALCON WATCH
Typ bramy
dostępowej
RF-5400VH-SS
Mini – Sensor
RF-5400VHMS
Multi – Sensor
RF-5400V-SR
FALCON II
Zakres
częstotliwości
138 – 174 MHz
138 – 174 MHz
30-108 MHz
Moc
wyjściowa
sygnału
1,5 W
2,5 W
0,25 W
2,0 W
5,0 W
-
RF-5400VH-RF
Relay
jeden sejsmiczny
lub magnetyczny
lub dwa optyczne
do czterech czujników
Trwałość
baterii
6
m-cy podczas
transmisji danych;
1 m-c podczas przesyłania fonii
1 rok podczas trans.
danych;
2 m-ce podczas
przesyłania fonii
w zależności od
typu baterii:
6 m-cy (BA-5390);
1 m-c (bateria przenośna)
brak danych
brak danych
138 – 174 MHz
1,5 W
5,0 W
brak danych
-
Współpraca
z radiostacją
RF5800M-HH
lub inna rdst.
RF5800M-HH
lub inna rdst.
RF5800M-HH
RF 5800V-HH
(zawiera GPS)
połączona kablem z sensorem
RF-5400V-SR
bądź z bramą
RF-5405VH-GW
kamera na podczerwień oraz
kamera dzienna
RF-5408 RI
Remonte Imager
RF-5400VH-AS
Acoustic Sensor
Dołączane detektory
(czujniki)
jeden sejsmiczny
lub magnetyczny
lub optyczny
brak danych
-
brak danych
RF-5400VH-SS,
RF-5400VH-MS,
RF-5400VH-AS
Waga
(kg)
0,36 kg
1,9 kg
1,7 kg
Zasięg
czujników
Sejsmiczny:
50 m pojazdy
15 m osoby
Magnetyczny:
25 m pojazdy
3 m osoby
Optyczny:
100 m pojazdy
(max.200 m)
50 m osoby
(max. 100 m)
2,6 kg
Pojazdy – detekcja
do 700 m, identyfikacja 400 m
Osoby – detekcja
do 300m, identyfikacja 200 m
brak
danych
brak danych
1 kg
-
-
-
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www.harris.com
23
Henryk ŁUKASIEWICZ
7.5. ELTA Systems Ltd. (Izrael)
Prace związane z wdrożeniem sensorów i ich sieci dla potrzeb sił zbrojnych
prowadzone są nie tylko w USA, lecz także w innych państwach, m.in. w Izraelu. Firma
ELTA produkuje m.in. mobilne centra obserwacyjne MOIC (Mobil Observation & Intelligence Center), których elementem składowym są systemy rozpoznania budowane w
oparciu o akustyczne, sejsmiczne, elektrooptyczne sensory UGSN (Unattended Ground
Sensor Network) i miniaturowe radary pola walki zarządzane z centrum operacyjnego.
Dane z prowadzonego rozpoznania przekazywane są w czasie rzeczywistym do centrum
dowodzenia. Podstawowe parametry przedstawiono w tabeli 3.
Tabela 3. Podstawowe parametry sensorów izraelskiej firmy Elta System Ltd.
Parametr techniczny
Czas pracy:
mała intensywność wymiany informacji)
duża intensywność wymiany informacji)
Zasięg detekcji:
pojazdy opancerzone
osoby
Waga
Sensory akustyczne
i sejsmiczne
Elektro optyczny
30 dni
7 dni
30 dni
7 dni
> 500 m
> 50 m
< 3 kg
> 500 m
> 100 m
< 4 kg
Na podstawie analizy dostępnych danych technicznych sensorów produkowanych przez różne firmy telekomunikacyjne możemy określić w przybliżeniu niezbędne
parametry techniczne poszczególnych czujników. Przybliżone parametry techniczne
poszczególnych czujników przedstawiają się następująco3:
Czujniki akustyczne:
wykrywanie osób
30 – 50 m
sensory pojazd lekki
300 – 500 m
czołg
1000 – 2000 m
helikopter
10 km
strzał pojedynczy
2 km
rozpoznawanie typu pojazdu z zastosowaniem sygnatur akustycznych zmniejsza osiągane zasięgi o 30–50 %
określanie kierunku źródła dźwięku: ± 3o (do 700 m)
możliwość śledzenia ruchu wykrytego pojazdu z użyciem SSB mającej odległość między sensorami około 300 m
Czujniki sejsmiczne:
wykrywanie osób
10 – 50 m
sensory pojazd lekki
300 m
czołg
2500 m
-
-
Źródło: [online] [dostęp: 2011]. Dostępny w Internecie: www. elta-iai.com
-
-
-
3
24
M. Dras, Wprowadzenie do tematyki sensorów i sieci sensorów bezprzewodowych do zastosowań
wojskowych, prezentacja, Radiotechnika marketing Sp.zo.o., Wrocław 2008.
Czujniki optyczne (PIR, kamery):
a) wykrywanie osób
kamery o dużej rozdzielczości na masztach
500 – 1500 m
kamery o małej rozdzielczości
50 – 150 m
b) wykrywanie pojazdów:
kamery o dużej rozdzielczości na masztach
1 – 5 km
kamery o małej rozdzielczości
150 – 500 m
PODSUMOWANIE
Sensory bezprzewodowe oraz ich sieci sensorów bezprzewodowych należą do
najszybciej rozwijających się technologii telekomunikacyjnych w ostatnim 10. leciu.
Zostały zakwalifikowane jako jedne z najbardziej obiecujących technologii początku
XXI wieku.
Obecnie stosowane lub wprowadzane do działań wojsk lądowych nienadzorowane sensory naziemne (term. ang. UGS, Unattended Ground Sensors) zapewniają wykrywanie, obserwowanie, nadzór, identyfikację i klasyfikację celów naziemnych, dokonywaną w czasie realnym, z dokładną lokalizacją przy pomocy systemu GPS. Do wykonania tych zadań w sensorach stosowane są czujniki akustyczne, sejsmiczne, magnetyczne, podczerwieni, elektrooptyczne, każde w swoim zakresie funkcyjnym z komplementarnością działań. Firmy telekomunikacyjne prowadzą prace badawczo – rozwojowe związane z zastosowaniem sensorów oraz budową bezprzewodowych sieci sensorowych do zastosowań militarnych. Wyniki prowadzonych prac są utajnione, do publicznej wiadomości dopuszczone są tylko informacje ogólnie znane. Z tego powodu
w poszczególnych krajach opracowuje się założenia taktyczno – techniczne dotyczące
możliwości taktyczno – technicznych sensorów i sieci sensorów do zastosowań militarnych. Prace są kompatybilne z badaniami dotyczącymi działań sieciocentrycznych,
w których sensory są znaczącymi elementami tych działań.
W artykule przedstawiono aspekty teoretyczne i praktyczne sieci sensorów bezprzewodowych, ograniczając się do sposobu funkcjonowania sieci oraz możliwości rozpoznawczych poszczególnych sensorów. Nie zostały ujęte inne, niemniej ważne aspekty
funkcjonowania sieci sensorów bezprzewodowych, do których możemy zaliczyć wymagania dotyczące:
kompatybilności i zamienności;
ochrony elektronicznej i fizycznej sensorów;
żywotności i odporności całkowitej na oddziaływanie czynników środowiskowych;
niezawodności;
eksploatacji, wygody obsługi technicznej i naprawy;
przechowywania;
podatności transportowej;
bezpieczeństwa;
skrytości maskowania;
technologii;
-
-
-
-
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
-
25
Henryk ŁUKASIEWICZ
konserwacji, pakowania i znakowania.
Sensory i sieci sensorów bezprzewodowych są bardzo pożytecznym i wydajnym
środkiem rozpoznania na współczesnym polu walki. Ich działanie zastępuje pracę oddziałów zwiadowczych i daje możliwość pracy w trudnych warunkach otoczenia. Koncepcja zastosowań sensorów do potrzeb militarnych jest koncepcją przyszłościową.
Rozpoczęto już prace badawcze dotyczące opracowania założeń taktyczno – technicznych sensorów do zastosowań militarnych dla SZ RP, a następnie ich produkcji.
LITERATURA
1. Dras M., Sensory i sieci bezprzewodowych sensorów, Radiotechnika Marketing
Sp. z o.o., Sympozjum nt. „Organa kierowania polowym węzłem łączności stanowiska dowodzenia BZ/BPanc i ich dokumentacja, Wyższa Szkoła Oficerska Wojsk Lądowych, Wrocław 2008.
2. Łukasiewicz H., Założenia taktyczno-techniczne wieloczujnikowych sensorów do
ochrony obiektów i wojsk własnych, PNB, WSOWL, Wrocław 2010.
3. Łukasiewicz H., Tendencje rozwojowe i możliwości wykorzystania sensorów i sieci
sensorów do celów wojskowych, [w:] „Zeszyty Naukowe WSOWL”, nr 2/2011,
(160), Wrocław 2011.
4. Materiały udostępnione przez Konsorcjum Naukowo - Przemysłowe Politechniki
Wrocławskiej Wydział Elektroniki i Radiotechniki Marketing Sp. z o.o., „Zintegrowane systemy wieloczujnikowych sensorów bezprzewodowych i ich sieci do aktywnej ochrony obiektów i wojsk własnych”, Wrocław 2008 r.
5. Winkler M., Tuchs K., Hughes K., Baraclay G., Theoretical and practical aspects of
military wireless sensor networks, [w:] “Journal of Telecommunications and Information Technology”, nr 2/2008.
Strony internetowe:
1. http://encyklopedia.interia.pl/haslo?hid=102487.
2. http://www.harris.com.
3. http://tridsys.com.
4. http://textronsystems.com.
5. http://textrondefense.com.
6. http://baesystems.com.
7. http://eltea-iai.com.
-
THEORETICAL AND PRACTICAL ASPECTS
OF MILITARY USE OF WIRELESS SENSOR NETWORKS
-
-
-
-
Summary
The aim of this publication is to introduce the issues connected with the work of sensors for
military purposes. It explains the theoretical and practical aspects of the identification capabilities and the use of the different types of sensors in a multi-sensor wireless network.
26
TEORETYCZNE I PRAKTYCZNE ASPEKTY MILITARNEGO ZASTOSOWANIA…
Very up-to-date is the use of technical devices to monitor the areas occupied by the enemy and which are hard to reach. Over the last few years, the possibility of gaining updated
information without risking soldiers’ lives has become very important.
Numerous telecoms have been influenced by the development of new technologies. They
have begun implementing technologies connected with communication and the construction of
sensors for industrial and military purposes.
-
-
-
-
Key words: sensors, wireless sensor network, army
-
27