P O L I T E C H N I K A
W A R S Z A W S K A
WYDZIAŁ ELEKTRONIKI I TECHNIK INFORMACYJNYCH
INSTYTUT RADIOELEKTRONIKI
Rok akademicki 2006/2007
PRACA DYPLOMOWA INŻYNIERSKA
MARCIN ANDRZEJ DĘBIŃSKI
BEZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU
UKŁADU KRĄŻENIA
Opiekun pracy:
dr inż. Grzegorz Domański
Ocena:
………………………………………
………………………………………
podpis
Przewodniczącego Komisji Egzaminu Dyplomowego
SPECJALNOŚĆ:
INŻYNIERIA BIOMEDYCZNA
Data urodzenia:
10 grudnia 1984 r.
Data rozpoczęcia studiów:
1 października 2003 r.
ŻYCIORYS
Urodziłem się 10 grudnia 1984 r. w Siedlcach. W latach 1991 – 1999 uczęszczałem do
Szkoły Podstawowej nr 12 w Siedlcach. We wrześniu 1999 roku rozpocząłem naukę w
II Liceum Ogólnokształcącym im. Św. Królowej Jadwigi w Siedlcach, w klasie o profilu
matematyczno-fizycznym. Po czterech latach edukacji w szkole średniej zdałem
egzamin dojrzałości i od października 2003 roku rozpocząłem studia wyższe na
Wydziale Elektroniki i Technik Informacyjnych Politechniki Warszawskiej. Wybraną
przeze mnie specjalnością jest Inżynieria Biomedyczna, która umożliwia mi rozwijanie
zainteresowań skupionych wokół medycyny oraz elektroniki.
……………………………………………
podpis
EGZAMIN DYPLOMOWY
złożył w dniu ........................................................................
z wynikiem ............................................................................
Ogólny wynik studiów .......................................................
Dodatkowe uwagi i wnioski Komisji:
....................................................................................................
....................................................................................................
STRESZCZENIE
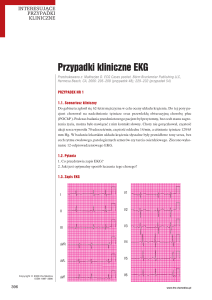
Celem niniejszej pracy było zaprojektowanie oraz wykonanie bezprzewodowego
urządzenia do nieinwazyjnego pomiaru stanu układu krążenia w warunkach
pozaszpitalnych, ze szczególnym uwzględnieniem pacjentów z przewlekłymi chorobami
serca. W rezultacie zrealizowany został system do monitorowania sygnału
elektrokardiograficznego. Przyjęto, że zbieranie i gromadzenie informacji związane ma
być z wykorzystaniem systemu komputerowego klasy PC. W związku z tym stworzono
odpowiednie oprogramowanie akwizycyjne umożliwiające realizację tego zadania. W
końcowym etapie prac przeprowadzono również badania pacjentów, które dowiodły,
że wykonany układ działa prawidłowo.
WIRELESS CIRCULATORY SYSTEM MONITORING DEVICE
SUMMARY
The aim of the work was to develop and design the wireless medical device that provides noninvasive information about the circulatory system. As a result, the medical
supporting system was realized for monitoring the ECG signal on PC of human with
chronic heart disease in their living surroundings. Within the project the hardware
part, embedded software and PC application was proposed, described and built. The
patient examination, which confirmed usefulness of the device, was performed.
Moim Rodzicom
Składam serdeczne podziękowania opiekunowi pracy –
Panu dr. inż. Grzegorzowi Domańskiemu za życzliwą
pomoc w jej realizacji, a także za cierpliwość i
wyrozumiałość podczas wszystkich etapów jej tworzenia.
SPIS TREŚCI
Spis treści.......................................................................................................................................... 6
1 Wstęp ............................................................................................................................................ 8
1.1
Cel pracy ....................................................................................................................................... 10
1.2
Zakres pracy ............................................................................................................................... 10
2 Zasady odbioru sygnału EKG ..............................................................................................12
2.1
Wprowadzenie .......................................................................................................................... 12
2.2
Powstawanie sygnału EKG.................................................................................................... 14
2.3
Elektrokardiogram................................................................................................................... 16
2.4
Rodzaje odprowadzeń ............................................................................................................ 19
2.4.1 Wstęp .................................................................................................................................................... 19
2.4.2 Rys historyczny .................................................................................................................................. 20
2.4.3 Odprowadzenia elektrokardiograficzne .................................................................................. 21
2.5
Podstawowe układy odbioru EKG ..................................................................................... 25
2.5.1 Standardowe EKG .............................................................................................................................. 25
2.5.2 Wielokanałowa rejestracja EKG (mapping) ........................................................................... 25
2.5.3 EKG ambulatoryjne Holtera .......................................................................................................... 26
3 Koncepcja urządzenia ...........................................................................................................28
3.1
Standard IrDA ............................................................................................................................ 29
3.2
Bluetooth ..................................................................................................................................... 30
3.3
Wzmacniacz biologiczny........................................................................................................ 31
3.4
Sygnały zakłócające przy pomiarze EKG ......................................................................... 31
4 Opis konstrukcji urządzenia ..............................................................................................32
4.1
Schemat blokowy...................................................................................................................... 32
4.2
Schemat elektryczny ............................................................................................................... 33
4.2.1 Wzmacniacz EKG ............................................................................................................................... 33
4.2.2 Układ AD620........................................................................................................................................ 33
4.2.3 Mikrokontroler ATmega8 .............................................................................................................. 34
4.2.4 Moduł CC1000 (Radiomodem) .................................................................................................... 36
6
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
SPIS
TREŚCI
4.2.5 Charakterystyka złącza RS-232 ................................................................................................... 39
4.3
Budowa mechaniczna ............................................................................................................. 43
5 Oprogramowanie systemu ..................................................................................................46
5.1
Program mikrokontrolera ATmega8 ................................................................................ 46
5.2
Program akwizycyjny na komputer PC ............................................................................ 48
6 Wyniki testów urządzenia ...................................................................................................54
7 Wnioski ......................................................................................................................................56
7.1
Koszt urządzenia....................................................................................................................... 56
7.2
Możliwości rozbudowy .......................................................................................................... 57
Spis rysunków ...............................................................................................................................58
Spis tabel .........................................................................................................................................59
Literatura .......................................................................................................................................60
7
1
WSTĘP
O
siągnięcia fizyki oraz techniki przyczyniły się do wprowadzenia do diagnostyki
medycznej znacznej liczby urządzeń i metod pomiarowych, predestynując w ten
sposób poprawę możliwości rozpoznawania stanu zdrowia pacjenta. Wysokie wymogi
współczesnej medycyny inicjalizują konieczność nieustannego polepszania parametrów
konstruowanych urządzeń oraz poszukiwania nowych metod zbierania informacji o
procesach fizjologicznych.
W medycynie stosowane jest szerokie spektrum różnorodnych metod pomiarowych.
Bazują one na częstokroć bardzo różnych zasadach fizycznych. Ogólnym trendem w
rozwoju aparatury diagnostycznej jest:
miniaturyzacja,
zwiększenie czułości, niezawodności, szybkości uzyskiwania informacji,
automatyzacja pomiarów.
Kolejnym celem, który stawiają sobie projektanci systemów medycznych, jest
ułatwienie obsługi urządzeń przez personel szpitalny, co niewątpliwie wiąże się w
znacznej mierze z udoskonaleniem sposobu prezentacji wyników pomiarów.
Zastosowanie technik cyfrowych oraz sprzętu komputerowego wychodzi naprzeciw
wymienionym celom.
Coraz częściej istotną cechą aparatury pomiarowej jest możliwość bezprzewodowej
akwizycji informacji diagnostycznej. Do niewątpliwych zalet stosowania takich
rozwiązań podczas konstruowania i budowy systemów medycznych można zaliczyć:
podniesienie liczby możliwych do monitorowania pacjentów (kilka urządzeń
nadawczych, jedno urządzenie odbiorcze),
podniesienie komfortu pacjenta oraz lekarza poprzez bezobsługową, ciągłą
rejestrację sygnałów biologicznych,
możliwość dokonywania diagnozy „na odległość”,
możliwość stałego monitorowania osób niepełnosprawnych oraz starszych,
8
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
WSTĘP
możliwość jednoczesnego odbioru, rejestracji oraz analizy badań długotrwałych
(np. badanie holterowskie),
możliwość odciążenia personelu szpitalnego od konieczności wykonywania
prostych, rutynowych pomiarów kontrolnych.
Ogólnie, techniką dokonywania pomiarów na odległość jest telemetria. Polega ona na
umieszczaniu w terenie urządzeń, które dokonują odczytu wybranej wielkości oraz
automatycznie przesyłają dane do centrali. Do wysyłania wyników pomiarów używa się
najczęściej układów radiowych, modemów, Internetu bądź sieci telefonii komórkowej.
Dziedziną techniki medycznej, która adaptuje zdalne dokonywanie pomiarów na grunt
badań lekarskich, jest biotelemetria. Przez to pojęcie rozumie się wszelkie urządzenia
biomedyczne, które umożliwiają fizjologiczne, bezprzewodowe przekazywanie danych
do oddalonego odbiornika. Celem biotelemetrii jest zdalne nadzorowanie lub
oddziaływanie na funkcje organizmów żywych. Rosnąca rola telemedycyny związana
jest z jej mnogimi zaletami, do których można zaliczyć [11]:
szybkość i interakcję w przekazywaniu informacji,
możliwość konsultacji z wysokiej klasy specjalistą,
poprawę efektywności poprzez analizę badań wzorcowych,
obniżenie kosztów,
progresję nowoczesnej techniki.
Pionierem biotelemetrii był dr Stuart Mackay, który prowadził badania w tej dziedzinie
już od lat 50. zeszłego stulecia. W 1954 roku udało mu się przesłać pierwsze sygnały
przez tkanki ciała. Z kolei dr Carter Collins skonstruował w 1963 roku układ
telemetryczny o bardzo małych rozmiarach - nadajnik mieścił się w plastikowej bańce o
średnicy dwóch i grubości około jednego milimetra. Obecnie bezprzewodowe systemy
zbierania informacji o stanie zdrowia pacjenta zaczynają powoli wchodzić do szerokiej
praktyki lekarskiej [14].
* * *
Mimo, że pomiary elektrofizjologiczne są od wielu lat powszechnie wykorzystywane w
diagnostyce medycznej, w dalszym ciągu obserwuje się niemały rozwój tej
problematyki, zarówno w zakresie technik pomiarowych, jak i w obszarze ich
zastosowań. Ponadto wykorzystanie rejestracji sygnałów elektrycznych w diagnostyce
serca daje szeroki obraz stanu badanego pacjenta. Nie bez znaczenia jest również fakt,
iż opis medyczny tej metody jest dobrze poznany i ma ona ugruntowaną pozycję w
środowiskach lekarskich. Mając do dyspozycji nowe osiągnięcia w dziedzinie
bezprzewodowego przesyłania informacji, ciekawym pomysłem wydaje się możliwość
9
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
WSTĘP
ich wykorzystania w procesie gromadzenia danych uzyskiwanych w badaniach
elektrokardiograficznych.
Opieka nad chorymi z niewydolnością serca lub pacjentami z grup podwyższonego
ryzyka wykorzystuje często systemy stałego nadzoru, telemetryczne urządzenia
monitorujące układ sercowo-krążeniowy. Przez 24 godziny na dobę stan zdrowia
pacjentów śledzony jest za pomocą wyspecjalizowanej aparatury. Współczesne
systemy pozwalają w ten sposób kontrolować setki osób, rejestrując różne parametry
fizjologiczne. Na podstawie tych danych można dokonywać diagnozy, planować terapię
a także, w razie komplikacji lub zagrożeń, wysyłać powiadomienia do
wyspecjalizowanych służb udzielających natychmiastowej pomocy.
Mając na względzie dotychczasowe doświadczenia na tym polu, wykorzystanie
bezprzewodowych rozwiązań może nie tylko znacznie usprawnić elektrofizjologiczne
metody diagnostyczne, ale również otwiera przed nimi zupełnie nowe obszary
zastosowań.
1.1 Cel pracy
Celem pracy było zaprojektowanie i wykonanie bezprzewodowego urządzenia do
monitorowania stanu układu krążenia – jednokanałowego układu EKG.
Przyjęto, że zbieranie i gromadzenie informacji związane jest z wykorzystaniem
systemu komputerowego. W związku z tym konieczne było stworzenie odpowiedniego
oprogramowania umożliwiającego realizację tego zadania.
1.2 Zakres pracy
Część praktyczna pracy składała się z kilku etapów. Podczas realizacji tematu
przygotowano zarówno część sprzętową jak i oprogramowanie.
Pierwotnym założeniem podczas wykonywania projektu było wykorzystanie elektrod
(czujniki sygnału bioelektrycznego) umieszczanych na ciele osoby badanej, które miały
być połączone z przetwornikiem analogowo-cyfrowym przez wzmacniacz analogowy
redukujący zakłócenia. Zaprojektowanie i zrealizowanie układu stanowiło główny
element prowadzonych prac.
W dalszej części wykonano również odpowiednie aplikacje akwizycyjne działające pod
kontrolą systemu operacyjnego Windows (testy dokonywane były na kilku wersjach
tego oprogramowania: 98SE, Me, XP). Program napisany został w języku C++ z
wykorzystaniem środowiska programistycznego Borland Builder C++. Zadaniem
aplikacji jest wyświetlanie na bieżąco przebiegu sygnału EKG oraz umożliwienie
zapisania go na dysku, celem ponownego prześledzenia lub archiwizacji.
10
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
WSTĘP
W zakres pracy wchodziło również wykonanie odpowiednich testów, określenie
przydatności urządzenia oraz obliczenie kosztów poniesionych na realizację
konstrukcji.
W początkowej fazie prac kontrolnych, sprzęt i oprogramowanie sprawdzane były
osobno. W końcowym etapie wykonana została generalna próba działania całego
urządzenia, co w praktyce wiązało się z przeprowadzeniem badania EKG konkretnej
osoby.
Poniżej zamieszczam krótką charakterystykę poszczególnych rozdziałów:
W rozdziale drugim umieściłem informacje związane z metodologią współczesnych
badań elektrokardiograficznych. Poglądowo przedstawiłem historię aparatów EKG,
stosowane rodzaje odprowadzeń oraz podstawowe układy pomiarowe.
W rozdziale trzecim zaprezentowałem koncepcję własnego systemu do diagnostyki
serca. Krótko opisałem technologie, które brałem pod uwagę podczas procesu
projektowania urządzenia.
Rozdział czwarty został poświęcony szczegółowemu przedstawieniu wybranych przeze
mnie części bazowych konstrukcji oraz ukazaniu urządzenia jako całości.
W rozdziale piątym opisałem część programową projektu, na którą składa się zarówno
program akwizycyjny na komputer PC odbierający finalne dane, jak i oprogramowanie
mikrokontrolera, sterującego pracą urządzenia.
W rozdziale szóstym przedstawiłem wyniki przeprowadzanych testów.
W rozdziale siódmym umieściłem wnioski dotyczące realizowanego zadania.
Oszacowałem również koszty urządzenia oraz przyszłe możliwości jego rozbudowy.
11
2
ZASADY ODBIORU SYGNAŁU EKG
2.1 Wprowadzenie
W
medycynie praktyczne wykorzystanie czynności elektrycznej komórek
rozpoczęło się zanim jeszcze podjęto próby wyjaśnienia jej genezy. Trudności
jakie wówczas napotykano, można najogólniej podzielić na dwie następujące grupy:
techniczne i biomedyczne. Pierwsze powiązane były ze sposobem odprowadzenia,
wzmocnienia i zarejestrowania bardzo słabych sygnałów elektrycznych o stosunkowo
małej częstotliwości (rys. 2.1) w warunkach znacznych zakłóceń zewnętrznych.
Trudności natury biomedycznej dotyczyły zróżnicowania nakładających się sygnałów
elektrycznych pochodzących od różnych tkanek i narządów oraz powiązania ich
charakteru ze stanem klinicznym pacjenta.
Rysunek 2.1 Amplitudy oraz zakresy widmowe częstotliwości niektórych biosygnałów.
Źródło: [17] s. 52-5.
12
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
Problemy te nadal ostatecznie nie zostały rozwiązane. Mimo tego, obserwuje się
nieprzerwany postęp w zakresie metodyki pomiarowej, aparatury oraz interpretacji
klinicznej wyników pomiarów sygnałów elektrycznych. Elektrograficzne metody
diagnostyczne, choć mają swoje niewątpliwe ograniczenia, rozpowszechniły się dość
szeroko w praktyce lekarskiej i stanowią w wielu przypadkach podstawę diagnostyki
(np. w kardiografii czy neurologii) [20].
Elektrokardiografia (w skrócie: EKG bądź ECG1) jest podstawową metodą badania
elektrycznej aktywności serca. Jest to najstarsza i najszerzej stosowana technika
diagnostyczna w kardiografii. EKG jest badaniem nieinwazyjnym 2 , łatwym do
rejestracji, a jego koszty, w porównaniu do innych metod diagnostycznych, są
minimalne. Mimo konkurencji ze strony wielu nowych procedur medycznych,
elektrokardiografia oparła się próbie czasu i nieprzerwanie od ponad stu lat używana
jest w klinikach i szpitalach na całym świecie.
* * *
Chociaż elektryczna czynność serca znana była już w połowie XIX w.3, to po raz
pierwszy sygnał EKG został publicznie zademonstrowany dopiero w 1889 r. przez
Augustusa Desiré Wallera (1856-1922) na Pierwszym Międzynarodowym Kongresie
Fizjologów w Bale4 [27]. Źródłem sygnału bioelektrycznego był wówczas jego pies
Jimmy, natomiast do odbioru i rejestracji wyników wykorzystano rtęciowy elektrometr
kapilarny [5, 7].
W 1903 r. Willem Einthoven (1860-1927) usprawnił zaproponowany przez Wallera
model pomiarowy, wykorzystując do zbierania biopotencjałów galwanometr strunowy
własnej produkcji5. Przeprowadził on szereg badań na ochotnikach, tworząc w ten
sposób pierwszą bazę przebiegów EKG, w której swoją reprezentację znalazło wiele
1
Obie formy są powszechnie stosowane. Skrót ECG pochodzi od anglosaskiego Electrocardiography.
EKG to akronim z holenderskiej wersji tego określenia. Jest to ukłon w stronę Willema Einthovena,
którego językiem ojczystym był właśnie holenderski i który uważany jest za ojca tej techniki
pomiarowej.
2
Pomijając EKG wykonywany w czasie operacji na sercu.
3
Dokonali tego Koellier i Müller w 1856 r. zaledwie 50 lat po odkryciu Galvaniego i Volty [20].
4
Pierwszy zapis EKG został upubliczniony przez Wallera już w 1887 r. Badaniu poddał się wówczas
Thomas Goswell, jeden ze współpracowników Wallera na Wydziale Medycznym przy szpitalu św.
Marii w Londynie.
5
Einthoven wykorzystał wcześniejsze prace Adera, ulepszając jego galwanometr telegraficzny.
13
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
patologii serca. Niektóre z oryginalnych pomysłów Einthovena są ciągle w
powszechnym użyciu w praktyce badań EKG. Można do nich zaliczyć m. in.
nazewnictwo poszczególnych fragmentów przebiegu EKG czy standard rozmieszczenia
elektrod na rękach i nogach pacjenta. Einthoven jest także uważany za twórcę
pierwszego teoretycznego modelu serca, w którym jest ono ukazane jako pojedynczy,
zmienny w czasie dipol. Za odkrycie mechanizmu elektrokardiogramu otrzymał on w
1924 r. Nagrodę Nobla [5].
Istotny rozwój elektrokardiografii jako metody diagnostycznej nastąpił jednak dopiero
po 1936 r., kiedy to Haynes zastosował wzmacniacz elektroniczny (lampowy) i pisak
termiczny umożliwiający trwały zapis przebiegu [27].
W ciągu minionych stu lat, dzięki wysiłkowi wielu badaczy, metody oparte na zapisie
EKG stały się podstawowym narzędziem diagnostycznym w kardiografii. Istotny rozwój
EKG ma szczególne znaczenie w rozpoznawaniu takich schorzeń jak:
niedokrwienie i zawał mięśnia sercowego,
zaburzenia rytmu i przewodzenia,
zapalenie osierdzia.
Badanie elektrokardiograficzne pozwala również na rozpoznawanie przerostu
przedsionków i komór oraz ocenę wpływu leków na działanie serca [6].
2.2 Powstawanie sygnału EKG
Elektrokardiogram przedstawia zapis odtworzonych na powierzchni ciała
sumarycznych napięć pochodzących od pobudzeń komórek mięśnia sercowego.
Czasowe i przestrzenne rozkłady pobudzeń na powierzchni serca są odwzorowane w
otaczającym, przewodzącym ośrodku jako wypadkowe pole prądów elektrycznych,
które pomiędzy wybranymi punktami na powierzchni ciała (tzw. odprowadzeniami),
objawia się w postaci charakterystycznego przebiegu sygnału EKG.
Czynność elektryczna zdrowego serca rozpoczyna się w stałym punkcie anatomicznie
zlokalizowanym w zatoce prawego przedsionka. Miejsce to nosi nazwę węzła
zatokowego lub zatokowo-przedsionkowego (Keitha-Flacka). Czynność węzła
zatokowego ma charakter okresowy (w spoczynku około 1,2 Hz) i jest związana z
naturalną zdolnością generacyjną zmodyfikowanej tkanki mięśniowej, z której jest
zbudowany6. Właściwość ta wyraża się niestabilnością potencjału spoczynkowego. Po
6
Komórki tej tkanki zawierają mniejszą liczbę włókienek mięśniowych, mają większą średnicę i są
czynnościowo izolowane od mięśni serca.
14
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
zakończeniu repolaryzacji potencjał na błonie osiąga wartość spoczynkową, po czym
powoli narasta do wartości progowej (poziomu wyładowań), w skutek czego dochodzi
do kolejnej depolaryzacji. Częstotliwość tego zjawiska regulują procesy biochemiczne,
wyrażające się zmianą nachylenia odcinka przebiegu potencjału czynnościowego od
wartości spoczynkowej do wartości progowej (poziomu wyładowań).
Pobudzenie powstałe w węźle zatokowo-przedsionkowym rozprzestrzenia się w
sposób sekwencyjnie uporządkowany drogą układu bodźcotwórczo-przewodzącego na
cały mięsień serca, powodując jego skurcz (rys. 2.2).
Rysunek 2.2 Układ bodźcotwórczo-przewodzący oraz przebiegi elektryczne w różnych częściach serca.
Źródło: [19] s. 11.
Elementy wchodzące w skład układu bodźcotwórczo-przewodzącego:
węzeł zatokowo-przedsionkowy (nadrzędny) (SA),
węzeł przedsionkowo-komorowy (AV),
pęczek Hisa (H) (jego prawa i lewa odnoga LRH),
włókna Purkiniego (WP).
Układ bodźcotwórczo-przewodzący zbudowany jest z komórek mięśnia sercowego,
których charakterystyczną właściwością jest przewodzenie sygnałów, a nie jak w
przypadku innych mięśni kurczliwość. W przeciwieństwie do mięśni szkieletowych,
15
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
gdzie transmisja sygnału odbywa się drogą nerwową, w mięśniu sercowym
przewodzenie następuje bezpośrednio od jednej komórki do drugiej. Pobudzenie
(depolaryzacja – repolaryzacja) zapoczątkowane w węźle zatokowo-przedsionkowym
przenosi się wzdłuż ścian serca do węzła przedsionkowo-komorowego z prędkością
około 1 m/s. W tym momencie następuje spowolnienie (a nawet zatrzymanie)
pobudzenia, umożliwiające skurcz przedsionków, który następuje przed pobudzeniem
komór.
Pęczek Hisa, jego odnogi oraz włókna Purkiniego obwodowo przewodzą sygnał z
prędkością około 2 – 4 m/s do niewielkich obszarów mięśni komór, skąd
wyspecjalizowane komórki (z dużo mniejszą prędkością – około 0,3 m/s) przekazują
dalej pobudzenie na resztę mięśnia komorowego. Dokładniejsze wartości prędkości
przenoszenia sygnału w różnych częściach serca przedstawiono w tab. 2.1.
Komórki:
Prędkość przenoszenia (m/s)
Węzła zatokowo-przedsionkowego
0,05
Mięśnia przedsionków
1,00
Strefy granicznej pomiędzy mięśniem przedsionków i
węzłem przedsionkowo-komorowym
0,05
Węzła przedsionkowo-komorowego
0,10
Pęczka przedsionkowo-komorowego
2,00
Przewodzące w mięśniu komór
4,00
Mięśnia komór pod wsierdziem
1,00
Węzła zatokowo-przedsionkowego
0,05
Tabela 2.1 Prędkości przenoszenia się depolaryzacji w układzie przewodzącym i w mięśniu sercowym.
Źródło: [25] s. 339.
Układ bodźcotwórczo-przewodzący ma właściwość spontanicznego generowania
pobudzenia. Częstotliwości generacji w różnych segmentach serca są różne i maleją w
miarę oddalania się od węzła zatokowo-przedsionkowego. Ma to istotne znaczenie w
przypadku niewydolności lub trwałego uszkodzenia jednego z ośrodków generacji.
Wówczas czynność pobudzająca przejmowana jest przez ośrodek podrzędny, jednak z
niższą częstotliwością. W normalnych warunkach, generacja dokonywana jest przez
punkt o najwyższej częstotliwości (węzeł zatokowy), który blokuje spontaniczną
czynność ośrodka o niższej częstotliwości (hierarchiczność działania) [20, 26].
2.3 Elektrokardiogram
Na wykresie EKG analizuje się (rys. 2.3):
16
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
linię izoelektryczną – linia pozioma zarejestrowana w czasie, gdy w sercu nie
stwierdza się żadnych pobudzeń (aktywności). Najłatwiej wyznaczyć ją według
odcinka PQ. Stanowi ona punkt odniesienia pozostałych zmian.
załamki – wychylenia od linii izoelektrycznej (dodatnie, gdy wychylone w górę;
ujemne, gdy wychylone w dół).
odcinki – czas trwania linii izoelektrycznej pomiędzy załamkami.
odstępy – łączny czas trwania odcinków i sąsiadującego załamka.
Rysunek 2.3 Jeden okres elektrokardiogramu zdrowego człowieka.
Opracowanie na podstawie: [5] s. 24-3.
Pięć wychyleń rejestrowanych na zapisie EKG, przed wprowadzeniem w 1890 r.
formuły poprawki, oznaczano ABCDE, natomiast 5 pochodnych wychyleń oznaczono
PQRST. Wybór P jest matematyczną konwencją na używanie liter z drugiej połowy
alfabetu7 [27].
* * *
Amplituda załamków zależy od wielu czynników. U ludzi dorosłych jest przede
wszystkim wykładnikiem liczby synchronicznie depolaryzujących i repolaryzujących się
komórek mięśniowych. Amplituda załamków zależy od oporu elektrycznego tkanek
7
N ma inne znaczenie w matematyce, a O jest używane jako początek kartezjańskiego układu
współrzędnych. Ponadto Einthoven użył O...X do zaznaczenia linii czasowych na swoim diagramie. P
jest po prostu kolejną, wolną literą.
17
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
znajdujących się pomiędzy elektrodą i sercem, od budowy ciała i położenia serca w
klatce piersiowej.
Załamek P wiąże się z czynnością elektryczną węzła zatokowo-przedsionkowego i
przedsionka. Zespół QRS odpowiada pobudzeniu (depolaryzacji) komór. Załamek T
odzwierciedla proces repolaryzacji komór. Czasami można również zaobserwować
jeszcze jeden załamek U, ale nie pozostaje on w istotnej relacji z fizjologią serca.
Wadliwy kształt i amplituda załamków oraz nieprawidłowe wartości odnoszące się do
odcinków i odstępów wskazują na zaburzenia w czynności bioelektrycznej mięśnia
sercowego. Wydłużenie odstępu PQ powyżej 200 ms świadczy o zwolnieniu
przewodzenia stanu czynnego przez układ przewodzący, zwłaszcza przez węzeł
przedsionkowo-komorowy. Brak załamka S, uniesienie odcinka ST ponad linię
izoelektryczną lub inne zniekształcenia zespołu QRST mogą wskazywać na zaburzenia w
krążeniu krwi w naczyniach wieńcowych serca na skutek np. zaczopowania
odgałęzienia jednej z tętnic wieńcowych [20, 25].
Medyczna interpretacja elektrokardiogramu jest procesem złożonym i wymaga
niemałego doświadczenia klinicznego. Kluczowym procesem jest w tym przypadku
poznanie relacji między pracą serca a otrzymywanym podczas badania wydrukiem.
Poglądowo zagadnienie to ukazuje rys. 2.4.
18
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
Rysunek 2.4 Powstawanie elektrokardiogramu w zestawieniu z pracą mięśnia sercowego8.
Źródło: [21] s. 15.
Normy prawidłowego zapisu EKG u osób dorosłych przedstawiono w tabeli poniżej:
Załamek
P
Odcinek
PQ
Odstęp
PQ
Zespół
QRS
czas szerzenia się depolaryzacji w mięśniu komór
90 ms
Odcinek
ST
okres depolaryzacji mięśnia komór
120 ms
Załamek
T
Odstęp
ST
Odstęp
QT
Odstęp
RR
Tabela 2.2
czas przewodzenia depolaryzacji w mięśniu przedsionków
100 ms
czas przejścia depolaryzacji przez węzeł przedsionkowokomorowy i pęczek przedsionkowo-komorowy
czas przewodzenia depolaryzacji od węzła zatokowoprzedsionkowego do mięśnia komór
50 ms
150 ms
czas szybkiej repolaryzacji mięśnia komór
(faza 3 repolaryzacji)
czas wolnej i szybkiej repolaryzacji mięśnia komór
(2 i 3 faza repolaryzacji)
potencjał czynnościowy mięśnia komór
(depolaryzacja i repolaryzacja)
120 ms
280 ms
370 ms
czas trwania jednego cyklu pracy serca
800 ms
Średni czas trwania poszczególnych załamków, odcinków i odstępów w EKG.
Źródło: [25] s. 345.
Badanie elektrokardiograficzne dostarcza istotnych informacji umożliwiających [20]:
wyznaczenie położenia serca w klatce piersiowej przez określenie osi
elektrycznej,
określenie rytmu serca, jego pochodzenia, miarowości i częstotliwości,
ocenę stanu przewodzenia pobudzenia elektrycznego serca,
ocenę stanu ukrwienia mięśnia serca, rozległości i lokalizacji zmian, w tym
zawału,
kontrolę bieżącą skutków leczenia,
podjęcie decyzji zastosowania defibrylacji itp.
2.4 Rodzaje odprowadzeń
2.4.1 Wstęp
8
TP (ang. Threshold Potential) – potencjał progowy.
19
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
Rejestracja potencjału czynnościowego błony komórkowej przez umieszczenie
elektrody pomiarowej (czynnej) wewnątrz izolowanej komórki jest w warunkach
klinicznych trudna do wykonania, wysoce ryzykowna i tym samym nieprzydatna w
rutynowej diagnostyce. Ma ona jednak pewne zalety dla celów badawczych: umożliwia
selekcję pożądanego sygnału spośród wielu sygnałów elektrycznych, pochodzących z
komórek otaczających badany obszar tkankowy.
Znacznie prostszy technicznie jest sposób odprowadzania sygnału z powierzchni
komórki, a zwłaszcza z powierzchni ciała, co ma szczególnie istotne znaczenie z punktu
widzenia komfortu pacjenta. Wykorzystuje się w tym celu właściwości przewodzenia
prądu elektrycznego przez płyny ustrojowe. Korzyść tę okupuje się niestety utratą
selektywności. Kształt sygnału zanurzonego w niejednorodnej substancji przewodzącej
w porównaniu do sygnału uzyskiwanego z izolowanej komórki, ulega nie tylko
zniekształceniu, ale zależy ponadto od wymiarów oraz miejsca przyłożenia elektrod
odprowadzających. Kształt napięcia mierzonego między elektrodami przyłożonymi na
zewnątrz komórki nie pozostaje w prostym i łatwo objaśnialnym związku z kształtem
potencjału czynnościowego generowanym na błonie izolowanej komórki [18, 26].
2.4.2 Rys historyczny
Standardowe odprowadzenia I, II oraz III zostały zaproponowane przez Einthovena w
1912 r.
W 1934 r. przez połączenie drutów do prawego i lewego ramienia oraz lewej stopy z
opornikiem 5kΩ Frank Wilson zdefiniował tzw. elektrodę obojętną. Kombinacja
odprowadzeń działała jak uziemienie i była związana z ujemnym końcem sygnału EKG.
Elektroda związana z dodatnim końcem stała się później „jednobiegunową” i mogła być
umiejscowiona gdziekolwiek na ciele. Wilson określił również jednobiegunowe
odprowadzenia VR, VL i VF, gdzie litera „V” oznaczała napięcie widoczne w miejscu
jednobiegunowej elektrody.
W 1938 r. American Heart Association i brytyjski Cardiac Society zdefiniowały
standardowe umiejscowienie i przewody elektryczne odprowadzeń przedsercowych
(V1-V6).
W 1942 r. Emanuel Goldberger zwiększył napięcie jednobiegunowych odprowadzeń
Wilsona o 50% i utworzył zwiększone odprowadzenia kończynowe aVR, aVL i aVF. Po
dodaniu trzech odprowadzeń kończynowych i sześciu odprowadzeń piersiowych
otrzymujemy 12-odprowadzeniowy elektrokardiogram, który jest obecnie najszerzej
stosowaną metodą elektrokardiograficzną.
W 1968 r. Henry Marriott wprowadził zmodyfikowane odprowadzenie piersiowe 1
(MCL 1) do monitorowania pacjentów intensywnego nadzoru kardiologicznego. W
20
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
1993 r. Robert Zalenski zaproponował kliniczne zastosowanie 15-odprowadzeniowego
EKG z rutynowymi odprowadzeniami V4R, V8 i V9 [4, 27].
2.4.3 Odprowadzenia elektrokardiograficzne
Odprowadzenie stanowi wypadkową co najmniej dwóch elektrod. Odprowadzenie
obejmujące 𝑛 elektrod umieszczonych w 𝑛 punktach ciała o potencjałach
𝑉10 , … , 𝑉𝑖0 , … , 𝑉𝑛0 w stosunku do dowolnego punktu odniesienia może być
przedstawione jako suma algebraiczna potencjałów w postaci:
𝑛
𝑉 = ∑ 𝑎𝑖 𝑉𝑖0
𝑖=1
Przedstawiona suma potencjałów jest niezależna od potencjału odniesienia, który
może być wybrany dowolnie.
Rysunek 2.5 Odprowadzenia konwencjonalnej elektrokardiografii klinicznej.
Opracowanie na podstawie: [5] s. 24-2.
21
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
Standardowe EKG wykonuje się przy pomocy 12 tzw. odprowadzeń klasycznych
(rys. 2.5):
3 dwubiegunowe kończynowe Einthovena (I , II , III),
3 jednobiegunowe kończynowe wzmocnione Goldbergera (aVR, aVL, aVF),
6 jednobiegunowych przedsercowych Wilsona (V1, V2, V3, V4, V5, V6).
W celach badawczych oprócz odprowadzeń klasycznych stosuje się także
odprowadzenia specjalistyczne (np. wewnątrzsercowe, nasercowe, przełykowe).
Wszystkie odprowadzenia kończynowe zwykłe umożliwiają pomiar różnic potencjałów
między miejscami przyłożenia elektrod (w mV). Oznacza się je rzymskimi cyframi:
odprowadzenie I – różnica potencjałów pomiędzy elektrodami: "lewa ręka" a
"prawa ręka" (LA – RA),
odprowadzenie II – różnica potencjałów pomiędzy elektrodami: "lewa goleń" a
"prawa ręka" (LL – RA),
odprowadzenie III – różnica potencjałów pomiędzy elektrodami: "lewa goleń" a
"lewa ręka" (LL – LA).
Ze względu na wygodę elektrody umieszczane na kończynach oznacza się kolorami:
elektroda czerwona – na prawym nadgarstku (RA),
elektroda żółta – na lewym nadgarstku (LA),
elektroda zielona – w okolicy lewej kostki (LL),
elektroda czarna – w okolicy prawej kostki (tzw. punkt odniesienia).
Dla zapewnienia dodatniego wychylenia zespołu QRS w odprowadzeniach Einthovena
przyjęto, że elektroda z prawej ręki łączy się zawsze z ujemnym biegunem
galwanometru, elektroda z lewej nogi – zawsze z dodatnim, a elektroda z lewej ręki – z
dodatnim przy rejestracji odprowadzenia I oraz z ujemnym przy rejestracji
odprowadzenia III.
Zapis EKG zarejestrowany z każdego z trzech odprowadzeń kończynowych jest inny,
ponieważ stanowi wypadkową potencjałów elektrycznych serca występujących w
przestrzeni pomiędzy tymi elektrodami. Rzutując na przednią ścianę klatki piersiowej
wektor siły elektromotorycznej serca, można sprowadzić potencjały czynnościowe
serca występujące w przestrzeni do procesu przebiegającego na płaszczyźnie. Łącząc ze
sobą na płaszczyźnie punkty przystawiania elektrod, otrzymuje się tzw. trójkąt
Einthovena, który w założeniu jest trójkątem równobocznym, co sprawia, iż linie
poprowadzone prostopadle z każdego ze środków trzech boków, reprezentujące
22
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
zerowy potencjał, przetną się w środku trójkąta. Jest oczywiste, że tylko dwie spośród
trzech różnic potencjałów w tym układzie są niezależne, czyli
𝐼 + 𝐼𝐼𝐼 = 𝐼𝐼
Powyższy związek znany jest pod nazwą prawa Einthovena (1908) [20, 25].
Wewnątrz rzutu serca znajduje się rzut wektora siły elektromotorycznej serca. Każda z
trzech elektrod kończynowych jest ustawiona pod innym kątem w stosunku do rzutu
wektora siły elektromotorycznej serca, czyli do osi elektrycznej serca. W związku z tym
załamki EKG zarejestrowane z poszczególnych odprowadzeń mają inną amplitudę, a
nawet mogą być inaczej skierowane w stosunku do linii izoelektrycznej.
W 1942 r. Goldberger spostrzegł, że jeśli potencjał odniesienia utworzony zostanie
przez symetryczne połączenie nie trzech, lecz dwóch kończyn, to zmierzony na trzeciej
kończynie potencjał ma wartość o 50% większą. W związku z tym z 3 elektrod
odczytujemy również wzmocnione (ang. augmented – wzmocniony, powiększony)
sygnały:
odprowadzenie dla kończyny górnej prawej – z elektrody "prawa ręka" (RA):
𝑎𝑉𝑅 = 𝑉𝑅𝐴 −
odprowadzenie dla kończyny górnej lewej – z elektrody "lewa ręka" (LA)
𝑎𝑉𝐿 = 𝑉𝐿𝐴 −
𝑉𝐿𝐴 + 𝑉𝐿𝐿 2𝑉𝑅𝐴 − 𝑉𝐿𝐴 − 𝑉𝐿𝐿
=
2
2
𝑉𝑅𝐴 + 𝑉𝐿𝐿 2𝑉𝐿𝐴 − 𝑉𝑅𝐴 − 𝑉𝐿𝐿
=
2
2
odprowadzenie dla kończyny dolnej lewej – z elektrody "lewa goleń" (LL)
𝑎𝑉𝐹 = 𝑉𝐿𝐿 −
𝑉𝐿𝐴 + 𝑉𝑅𝐴 2𝑉𝐿𝐿 − 𝑉𝐿𝐴 − 𝑉𝑅𝐴
=
2
2
Odprowadzenia wzmocnione Goldbergera nie są niezależne w stosunku do
odprowadzeń kończynowych zwykłych i oczywiście nie dostarczają dodatkowych
informacji. Są jedynie wygodniejszą formą prezentacji danych, usprawniającą
interpretacje kliniczne [5, 20].
23
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
W standardowym 12-odprowadzeniowym EKG wykorzystuje się także 6 elektrod
jednobiegunowych, przedsercowych Wilsona (rys. 2.6)9:
V1 – elektroda w prawym czwartym międzyżebrzu (przestrzeni międzyżebrowej)
przy brzegu mostka,
V2 – elektroda w lewym czwartym międzyżebrzu (przestrzeni międzyżebrowej)
przy brzegu mostka,
V3 – w połowie odległości pomiędzy elektrodami V2 a V4,
V4 – elektroda w lewym piątym międzyżebrzu (przestrzeni międzyżebrowej) w
linii środkowo-obojczykowej lewej,
V5 – elektroda w lewym piątym międzyżebrzu (przestrzeni międzyżebrowej) w
linii pachowej przedniej lewej,
V6 – elektroda w lewym piątym międzyżebrzu (przestrzeni międzyżebrowej) w
linii pachowej środkowej lewej.
Rysunek 2.6 Rozmieszczenie i sposób podłączenia odprowadzeń przedsercowych.
Źródło: [21] s. 18.
Napięcia odprowadzeń przedsercowych wyznacza się jako różnicę potencjału w
odpowiednim punkcie 𝑣𝑖 oraz średniej potencjałów trzech kończyn (obu rąk i lewej
nogi):
𝑉𝑖 = 𝑣𝑖 −
𝑉𝑅𝐴 + 𝑉𝐿𝐴 + 𝑉𝐿𝐿
3
𝑑𝑙𝑎 𝑖 = 1 … 6
9
Pomysł Wilsona z 1934 r. dotyczący tworzenia potencjału odniesienia związany był pierwotnie z
odprowadzeniami kończynowymi. Nie znalazł on jednak zastosowania praktycznego.
24
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
2.5 Podstawowe układy odbioru EKG
2.5.1 Standardowe EKG
W praktyce medycznej najszerzej wykorzystywanym systemem do pomiarów
elektrokardiograficznych jest standardowe EKG. Rozwinięcie tej metody było możliwe
dzięki ciągłemu udoskonalaniu urządzeń pomiarowych oraz elektrod zbierających. Nie
bez znaczenia była również standaryzacja odprowadzeń. Umożliwiła ona bowiem
porównywanie zarejestrowanych sygnałów pochodzących od różnych pacjentów.
Wraz z rozwojem techniki do elektrokardiogramów wprowadzono systemy analizy
rejestrowanego sygnału. Początkowo związane one były z oceną wybranych
parametrów czasowych i amplitudowych. Obecnie wdrażane są techniki automatycznej
interpretacji sygnału EKG.
Do podstawowych zalet standardowego EKG można zaliczyć:
dostępność,
łatwość wykonywania rejestracji,
niski koszt.
Nie można jednak zapominać o wadach tej metody: rejestrację z ograniczonej liczby
odprowadzeń w krótkim czasie i w spoczynku. Właśnie te niedogodności spowodowały
rozwój także innych technik pomiaru EKG [26].
2.5.2 Wielokanałowa rejestracja EKG (mapping)
Standardowe EKG jest zwykle badaniem wystarczającym do podstawowej diagnostyki
kardiologicznej. Jeżeli jednak zależy nam na pełnej informacji o elektrycznej aktywności
serca konieczne staje się rozszerzenie stosowanych rozwiązań. Zwiększenie liczby
odprowadzeń, właściwa ich lokalizacja oraz odpowiednie oprogramowanie systemu to
podstawowe założenia umożliwiające stworzenie systemu posiadającego nowe walory
jakościowe w badaniach elektrokardiograficznych.
Metoda wielokanałowej rejestracji EKG rozwijana jest od dawna, jednak jej
użyteczność kliniczna, na skutek pracochłonności pomiarów i analizy wyników, jest
ograniczona. Postęp technologii komputerowej otwiera jednak nowe możliwości tej
technice diagnostycznej.
System mappingu ma wiele ciekawych zastosowań. Najczęściej wykorzystuje się mapy
izopotencjałów wyznaczane w odstępach kilkunastu milisekund. Dla lokalizacji zawału
istotna jest wartość oraz miejsce występowania minimum oraz maksimum potencjału
na klatce piersiowej [26].
25
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
2.5.3 EKG ambulatoryjne Holtera
Poza postępem w klasycznej elektrokardiografii, obserwowany jest bardzo dynamiczny
rozwój metod ciągłego monitorowania EKG. Prekursorem tego typu rejestracji był
Norman J. Holter (1914-1983). System ambulatoryjnego monitorowania EKG składa się
z rejestratora wyposażonego w nośnik sygnału oraz z analizatora. Rejestrator jest
noszony przez pacjenta.
Obecnie stosowane są trzy metody wielogodzinnej, ambulatoryjnej rejestracji EKG:
systemy klasyczne, umożliwiające 24 godzinny (i dłuższy) zapis EKG (szczególnie
dobrze sprawdza się podczas badania arytmii serca),
rejestratory „na żądanie” (ang. event holter) z pętlą pamięci lub bez,
rejestratory wszczepialne.
Sygnał z badania holterowskiego może być zapisywany na taśmie magnetycznej
(szczególnie popularny w starszych modelach) lub na kartach pamięci (wmontowanych
w urządzenie lub wymienialnych). Wadami zapisu danych na nośniku magnetycznym
są: możliwość zaburzeń przesuwu taśmy oraz ograniczony zakres przenoszonych
częstotliwości. Nowoczesne analizatory potrafią jednak częściowo wyeliminować
niekorzystny skutek nierównomiernego przesuwu taśmy.
Na jakość zapisu zarówno w przypadku użycia pamięci typu flash czy nośników
magnetycznych mogą mieć wpływ czynniki środowiskowe (np. pola magnetyczne) oraz
inne zaburzenia spowodowane codzienną aktywnością badanego. Można więc
stwierdzić, że pożądaną cechą dobrego rejestratora holterowskiego jest
uniezależnienie zapisu od wpływów środowiskowych oraz wysoka częstość
próbkowania.
Rejestratory „na żądanie” to urządzenia, które zapisują jedynie krótkie sekwencje
wykonywane przez pacjenta podczas występowania niepokojących objawów. Z uwagi
na opóźnienie rozpoczęcia rejestracji w stosunku do wystąpienia istotnych objawów,
wprowadzono urządzenia wyposażone w tzw. pętlę pamięci. Funkcja ta umożliwia
dokonanie zapisu EKG np. na 30 sekund przed aktywacją rejestratora. Oczywiście,
chcąc wykorzystać pętlę pamięci, konieczne jest nieprzerwane monitorowanie
czynności serca.
Rejestrator wszczepialny to typ aparatu holterowskiego, który umożliwia
wielomiesięczne monitorowanie pacjenta i zalecany jest dla osób, których zaburzenia
rytmu pracy serca występują bardzo rzadko.
Nowsze aparaty holterowskie są najczęściej wyposażone w systemy automatycznej
oceny wyniku badania. Analiza komputerowa jest niestety mało dokładna i obarczona
26
EKG
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
ZASADY
ODBIORU SYGNAŁ U
dużym błędem. Z tego względu ostateczna diagnoza musi być zawsze postawiona przez
wykwalifikowany personel medyczny.
Inne systemy odbioru EKG to m.in.: próby wysiłkowe, monitorowanie EKG przez
telefon czy intensywny nadzór kardiologiczny [26].
27
EKG
3
KONCEPCJA URZĄDZENIA
B
ezprzewodowe urządzenie do monitorowania stanu układu krążenia musi
spełniać następujące wymogi:
pomiar sygnału elektrokardiograficznego,
izolacja galwaniczna urządzenia od sieci energetycznej lub zasilanie bateryjne ze
względu na bezpieczeństwo pacjenta (groźba porażenia prądem elektrycznym),
bezprzewodowa transmisja danych do komputera,
częstotliwość próbkowania minimum 200 Hz, ze względu na pasmo sygnału EKG
do 100 Hz,
minimum 10-bitowy przetwornik analogowo-cyfrowy,
małe wymiary zewnętrzne,
mały pobór prądu (energooszczędność),
co najmniej trzy elektrody (dwie elektrody dla jednego kanału różnicowego oraz
jedna elektroda zwrotna).
Schemat blokowy koncepcji systemu przedstawiony został na rys. 3.1.
Wzmacniacz
EKG
Mikrokontroler z
10-bitowym
przetwornikiem
ADC
Moduł nadajnika
bezprzewodowego
Komputer PC
Moduł odbiornika
bezprzewodowego
Rysunek 3.1 Schemat blokowy koncepcji systemu do monitorowania stanu pacjenta.
Opracowanie własne.
28
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
KONCEPCJA
URZĄDZENIA
Możliwe rozwiązania transmisji bezprzewodowej to np.:
transmisja radiowa (pasmo 433 MHz),
transmisja radiowa (Bluetooth),
podczerwień (IrDA).
3.1 Standard IrDA
Standard IrDA (ang. Infrared Data Association) jest szeregowym łączem optycznym
pasma podczerwonego wykorzystywanym głównie w technice komputerowej.
Standard ten zaczął się rozprzestrzeniać od roku 1993, by już w rok później oferować
bezprzewodowy, krótkodystansowy transfer danych na poziomie 4Mb/s. W aplikacjach
medycznych standard IrDA wykorzystywany jest do transferu danych aparatury
diagnostyczno-pomiarowej, znane są zastosowania do łączności pomiędzy osobistym
asystentem cyfrowym lekarza a urządzeniami dostępowymi, w domowym nadzorze
stanu zdrowia pacjenta itp. Podstawowe parametry standardu ukazuje tabela poniżej.
Parametr
Właściwości
Podczerwień
850 - 900 nm
Typ połączenia
punkt-punkt
Liczba kanałów
Jeden - do transmisji danych
Prędkość transmisji
obowiązkowo: 9,6 kb/s,
opcjonalnie: 19,2 kb/s, 38,4 kb/s, 57,6 kb/s,
115,2 kb/s (IrDA 1.0 lub 1.1) oraz 0,576 Mb/s, 1,152 Mb/s, 4 Mb/s
(IrDA 1.1)
Zasięg i typ transmisji
około 2m; urządzenia muszą się "widzieć";
kąt wiązki transmisji - 30o;
przy jednokierunkowej transmisji danych: co najmniej 5m
Maksymalna liczba
aktywnych urządzeń
2 połączenia
Multipleksacja
przestrzenna
Bezpieczeństwo na
poziomie łącza
brak
Emulacja portu
szeregowy + równoległy
Tabela 3.1 Parametry standardu IrDA.
Opracowanie na podstawie: [29].
Standard IrDA charakteryzuje się:
prostą i tanią implementacją,
małym poborem mocy,
29
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
połączeniami bezpośrednimi typu punkt-punkt,
wydajnym i pewnym transferem danych.
KONCEPCJA
URZĄDZENIA
Technologia IrDA wykorzystuje skupioną wiązkę światła w paśmie podczerwonym.
Warunkiem zastosowania IrDA jest posiadanie co najmniej dwóch urządzeń, pomiędzy
którymi nie ma niczego, co utrudniałoby ich wzajemną widoczność [9, 29].
3.2 Bluetooth
Standard Bluetooth opisany jest w specyfikacji liczącej ponad 1500 stron. Jest to
standard definiujący cyfrowe łącze radiowe krótkiego zasięgu, do transmisji typu
punkt-wielopunkt. Specyfikacja definiuje zarówno poziom połączeń jak i poziom
aplikacji.
Ogólna charakterystyka technologii Bluetooth:
nominalny zasięg: 10 m; może być powiększony do 100 m, po zastosowaniu
opcjonalnego wzmacniacza,
maksymalna szybkość łącza: 723,2 kb/s (przy zastosowaniu EDR10 do 3Mb/s),
transmisja w nielicencjonowanym paśmie ISM11 - 2,4 GHz,
modulacja FSK (Frequency Shift Keying), z zastosowaniem schematu rozpraszania
widma z przeskokami częstotliwości. W ramach pasma częstotliwości dostępnych
jest 79 kanałów, w odstępach co 1 MHz. Kolejność ich wykorzystywania do
transmisji jest ustalana w sposób pseudolosowy. Przeskoki między kanałami
następują 1600 razy na sekundę (co 625 μs), co zapewnia dużą odporność na
sygnały zakłócające,
w obrębie podstawowej jednostki organizacyjnej możliwa jest obecność do 8
urządzeń aktywnych i 255 nieaktywnych (tryb PARK),
procedury zabezpieczające transmisję przed przechwyceniem przez osoby
niepowołane są zaimplementowane na poziomie łącza – nie trzeba wprowadzać
dodatkowych zabezpieczeń za poziomie aplikacji.
Najpoważniejszą zaletą nadajnika Bluetooth jest wielokierunkowa charakterystyka
transmisji, co umożliwia wygodne, bezprzewodowe przesyłanie danych, przy czym
nadajnik i odbiornik nie muszą się bezpośrednio „widzieć”, tak jak w standardzie IrDA.
Wystarczy, że znajdą się swoim zasięgu [28].
10
EDR (ang. Enhanced Data Rate) - podwyższona wielkość strumienia danych.
11
ISM (ang. Industrial, Scientific, Medical) - przemysłowy, naukowy, medyczny.
30
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
KONCEPCJA
URZĄDZENIA
3.3 Wzmacniacz biologiczny
Wymagania stawiane wzmacniaczowi sygnałów biologicznych to m. in.:
wzmacniacz nie może w żaden sposób wpływać na proces fizjologiczny, który ma
być monitorowany,
mierzony sygnał nie powinien być zniekształcany,
wzmacniacz powinien zapewnić najlepszą możliwą separację sygnału i szumu,
wzmacniacz powinien gwarantować zabezpieczenie przed ryzykiem porażenia
prądem.
3.4 Sygnały zakłócające przy pomiarze EKG
Podczas konstruowania urządzenia należało wziąć pod uwagę możliwe zakłócenia.
Można do nich zaliczyć:
zakłócenia wewnętrzne, których źródła znajdują się w obrębie ciała pacjenta,
szumy własne aparatury pomiarowej,
zakłócenia zewnętrzne, przedostające się do układu pomiarowego z przestrzeni
otaczającej.
Do zakłóceń wewnętrznych należą:
napięcia bioelektryczne innego pochodzenia niż
elektromiograficzne: niecykliczne drżenie mięśniowe),
wolnozmienny, cykliczny dryft linii izoelektrycznej (wywołany np. czynnością
oddechową pacjenta),
niecykliczny dryft linii zerowej spowodowany np. odklejaniem się elektrody.
EKG
(np.
sygnały
Zakłócenia wewnętrzne można w dużej mierze ograniczyć, wygodnie układając
zrelaksowanego pacjenta oraz stosując umiarkowany docisk elektrod.
Szumy własne aparatury pomiarowej przy obecnym postępie techniki nie odgrywają w
większości przypadków znaczącej roli.
Zakłócenie zewnętrzne, które oddziałują w najbardziej destrukcyjny sposób na pomiar
EKG to składowa 50 Hz wyindukowana przez sieć zasilającą [6].
31
4
OPIS KONSTRUKCJI URZĄDZENIA
W
ramach pracy zaprojektowano i zbudowano system do bezprzewodowego
monitorowania stanu układu krążenia.
4.1 Schemat blokowy
Schemat blokowy zbudowanego urządzenia do monitorowania stanu pacjenta
pokazano na rys. 4.1.
Wzmacniacz EKG z
układem AD620
Mikrokontroler
ATmega8 z
10-bitowym
przetwornikiem ADC
Konwerter poziomu
napięć na RS-232
(MAX232)
Blok zasilania
bateryjnego z
przetwornicą napięcia
ujemnego ICL7660
Komputer PC
Moduł odbiornika
radiowego CC1000
Moduł nadajnika
radiowego CC1000
Rysunek 4.1 Schemat blokowy systemu do monitorowania stanu pacjenta.
Opracowanie własne.
System do bezprzewodowego monitorowania stanu układu krążenia składa się z:
bloku wzmacniacza sygnału EKG (część analogowa),
32
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
mikrokontrolera ATmega8 z wbudowanym przetwornikiem ADC 10-bitowym,
układu nadajnika radiowego z mikrokontrolerem CC1000 (moduł pracujący na
częstotliwości 433 MHz),
układu odbiornika radiowego z mikrokontrolerem CC1000 (moduł pracujący na
częstotliwości 433 MHz), połączonego z komputerem interfejsem RS-232,
komputera PC z programem akwizycyjnym.
4.2 Schemat elektryczny
4.2.1 Wzmacniacz EKG
Zaprojektowano jednokanałowy wzmacniacz EKG, do wejść którego dołączone są dwie
elektrody tworzące jeden kanał różnicowy oraz jedna elektroda zwrotna.
Rezystancja ciała ludzkiego jest wysoka i zmienna. Pomiar napięcia między punktami
na ciele jest podatny na zakłócenia, w szczególności na te pochodzące od sieci
energetycznej. Przy zakresie sygnału EKG rzędu miliwoltów zakłócenia mogą być rzędu
woltów. Potrzebny więc jest wzmacniacz analogowy redukujący zakłócenia.
Zastosowany układ elektroniczny wykorzystuje moduł scalonego wzmacniacza
pomiarowego AD620 firmy Analog Devices. Układ ten ma wzmocnienie 1V / 1mV [1].
4.2.2 Układ AD620
Struktura wewnętrzna AD620 odpowiada zmodyfikowanej klasycznej konfiguracji
wzmacniacza instrumentalnego złożonego z trzech wzmacniaczy operacyjnych. Ten typ
wzmacniacza pozwala na jednoczesne uzyskanie wysokiej rezystancji wejściowej RWE
(aby nie obciążać nadmiernie źródła wzmacnianych sygnałów) przy jednoczesnym
dużym wzmocnieniu sygnału różnicowego Kd. Istotną zaletą tego układu jest również
osiąganie bardzo wysokiego współczynnika CMRR 12 przy bardzo małym dryfcie
napięcia i prądu niezrównoważenia. Wzmacniacz pomiarowy pozwala na spełnienie
wysokich wymagań wynikających ze źródła sygnału, które w prostym wzmacniaczu
różnicowym opartym na jednym wzmacniaczu operacyjnym nie mogłyby być
zrealizowane [12].
Na rys. 4.2 przedstawiono przykład podłączenia układu do odpowiednich elektrod na
ciele osoby badanej, w celu zarejestrowania odprowadzenia kończynowego
dwubiegunowego pierwszego (różnica potencjałów między prawą i lewą ręką). Jak
widać, układ redukujący zakłócenia wymaga podłączenia jeszcze jednej elektrody.
12
CMRR (ang. Common-mode rejection ratio) - współczynnik tłumienia sygnału wspólnego.
33
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Wynika to z faktu, że zastosowany w tym układzie wzmacniacz różnicowy działa
prawidłowo pod warunkiem, iż żaden z mierzonych sygnałów nie przekroczy pewnego
poziomu. Poziom ten wyznacza różnica napięcia zasilającego wzmacniacz (ok. – 0,7V).
Dlatego należy ustalić potencjał osoby badanej, aby w układzie wzmacniającym odjąć
go od sygnału wspólnego mierzonych sygnałów. W tym celu stosuje się dodatkową
elektrodę (ang. shield driver). Jest ona przymocowana do prawej nogi badanego i
standardowo oznaczana jest kolorem czarnym [12, 17].
Rysunek 4.2 Schemat aplikacyjny układu AD620.
Źródło: [1] s. 12.
4.2.3 Mikrokontroler ATmega8
ATmega8 jest 8-bitowym mikrokontrolerem RISC, wyposażonym w 8 kB nieulotnej
pamięci typu FLASH.
Układ mikrokontrolera ATmega8 zawiera [2]:
pamięć programu typu FLASH i pamięć danych RAM (ang. random access
memory),
jednostkę arytmetyczno-logiczną ALU (ang. arithmetic and logic unit),
system urządzeń wejściowych i wyjściowych I/O (ang. input/output)
umożliwiający ustawianie i odczytywanie napięć z wybranych „nóżek” oraz
sterowanie dodatkowymi układami wewnętrznymi (m.in. licznikami ogólnego
przeznaczenia, interfejsami transmisji szeregowej RS-232, SPI i I2C,
komparatorem, przetwornikiem A/C, układami automatycznego resetowania
tzw. watchdog i brown-out detector, pamięcią EEPROM),
jednostkę sterującą CU (ang. control unit).
34
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Pamięć programu i danych
W sposobie obsługi pamięci programu i danych mikrokontrolery AVR reprezentują
podejście określane jako Harvard architecture, w którym kod programu i dane
pamiętane są w dwóch rozłącznych obszarach pamięci. Rozwiązanie takie uważane jest
za szybsze w porównaniu z klasycznym modelem z jedną wspólną pamięcią.
Pamięć programu typu FLASH składa się z 8192 bajtów i zawiera instrukcje programu.
Instrukcje te kodowane są w kolejnych dwóch bajtach. Zatem maksymalnie program
może składać się z 4096 instrukcji. Cechą pamięci FLASH jest zachowanie zawartości
niezależnie od napięcia zasilania. Aby udostępnić łatwe (możliwe do wykonania przez
użytkownika bez specjalistycznych urządzeń) programowanie układu, pamięć
wykonana jest w tej samej technologii jaką znamy z dyskietek USB (pendrive). Jak
zapewnia producent pamięć programu umożliwia co najmniej 10 000 operacji
programowania.
Pamięć danych RAM jest pamięcią o swobodnym dostępie o pojemności 1024 bajtów.
Umożliwia zapis i odczytywanie komórek, jednak jej zawartość jest tracona z chwilą
wyłączenia zasilania. Służy do pamiętania wartości wykorzystywanych zmiennych oraz
do implementacji mechanizmu stosu stosowanego przy wywoływaniach funkcji.
Jednostka arytmetyczno-logiczna
Jednostka ta umożliwia realizację działań arytmetycznych (dodawanie, odejmowanie,
mnożenie), logicznych (operacje koniunkcji i alternatywy) oraz porównań. Argumenty i
wyniki tych działań pamiętane są w tzw. rejestrach, które możemy wyobrażać sobie
jako wewnętrzną 32-bajtową pamięć RAM ALU. Bajtowy rozmiar tych rejestrów
wymuszony jest przez 8-bitową szynę mikrokontrolera.
System wejścia/wyjścia
Z poziomu programu system I/O widoczny jest jako 64-bajtowy obszar pamięci.
Użytkownicy w swoich programach mają możliwość odczytu i zapisu wybranych bajtów
tego obszaru i w ten sposób konfiguracji systemu.
Jednostka sterująca
Zadaniem jednostki sterującej jest pobieranie kodów instrukcji z pamięci ROM i ich
wykonywanie. Jednostka ta zawiera licznik 12-bitowy (liczący w zakresie od 0 do 4095)
wskazujący w pamięci ROM instrukcję którą należy wykonać. Bezpośrednio po
włączeniu zasilania wartość licznika wynosi 0 [2, 3].
35
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
4.2.4 Moduł CC1000 (Radiomodem)
Uniwersalny, zintegrowany Radiomodem CC1000 DIP SWITCH (rys. 4.3) został
zaprojektowany jako moduł OEM13 i pracuje w nielicencjonowanym paśmie 433 MHz z
regulowaną mocą wyjściową do 10 dBm.
Rysunek 4.3 Moduł CC1000 (widok z góry).
Został on zbudowany w oparciu o scalony transceiver 14 CC1000 firmy Chipcon.
Szybkość transmisji danych w torze radiowym zmieniana jest w zakresie
600-9600 bitów/s. Wbudowany przełącznik typu dip switch pozwala użytkownikowi na
ustawienie prędkości komunikacji z portem szeregowym RS-232 w zakresie
600-57600 bitów/s. Radiomodem oferowany jest w zestawie z anteną prętową
wyposażoną w złącze typu SMA (rys. 4.4)15.
Rysunek 4.4 Gniazdo typu SMA (żeńskie).
13
OEM (ang. Original Equipment Manufacturer) - organizacja sprzedająca produkty wytworzone
przez inne firmy. Termin może być mylący, gdyż OEM nie jest wytwórcą, lecz sprzedawcą sprzętu
dla użytkownika końcowego, choć zdarza się niekiedy, że jest jego projektantem.
14
W radiokomunikacji terminem transceiver (potocznie - "radiostacja") określane jest urządzenie
nadawczo - odbiorcze, czyli takie, które łączy funkcjonalność nadajnika (ang. transmitter) i
odbiornika (ang. receiver).
15
Złącze SMA (ang. SubMiniature version A) - złącze współosiowe stosowane do łączenia urządzeń
wykorzystujących kable koncentryczne i przesyłających sygnały wysokiej częstotliwości (do 18 GHz).
36
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
W torze radiowym modem umożliwia komunikację z maksymalną prędkością
9600 bitów/s. Prędkość ta może być zmieniana w zakresie 600-9600 bitów/s.
Komunikacja z komputerem może odbywać się z prędkością zmienianą w zakresie
600-57600 bitów/s.
Transmisja radiowa realizowana jest w postaci pakietów, maksymalnie 64 bajtowych, z
czego 54 bajty są danymi odebranymi z portu szeregowego, a pozostałe użyte są na
potrzeby formowania pakietów. Ponieważ transmisja pomiędzy komputerem może
przebiegać szybciej niż w torze radiowym, do sterowania przepływem danych został
zastosowany sygnał CTS złącza RS-232, który informuje komputer nadrzędny o
gotowości przyjęcia danych przez modem. W związku z tym, do poprawnej pracy
modemu w terminalu należy zastosować sprzętowe sterowanie przepływem danych.
Jeżeli wysyłane dane przekraczają pojemność bufora, to po jego zapełnieniu zerowany
jest sygnał CTS, przez co komputer wstrzymuje transmisje danych. Następnie modem
wysyła drogą radiową ramkę danych. Po wysłaniu jednego pakietu danych ustawia on
sygnał CTS sygnalizując gotowość do przyjęcia kolejnych danych.
Chcąc wysłać dane, nie ma konieczności zapełniania bufora. Modem po odebraniu
każdego bajtu z portu szeregowego uruchamia timer, który odlicza czas równy
przesłaniu pięciu bajtów danych. Jeśli czas pomiędzy kolejnymi bajtami będzie większy
od odliczonego przez timer czasu, to transmisja danych poprzez port szeregowy
zostanie wstrzymana i rozpocznie się przesyłanie zawartości bufora drogą radiową.
Maksymalny czas pomiędzy poszczególnymi bajtami (timeout), który spowoduje
wstrzymanie transmisji danych jest uzależniony od aktualnie obowiązującej prędkości
na porcie RS-232 oraz jest odpowiednikiem wartości potrzebnej do przesłania pięciu
bajtów danych (wartość zmienna).
Wyjątek stanowi tryb pracy przystosowany do współpracy z programem
HyperTerminal16. W trybie tym transmisja przebiega ze stałą prędkością 57600 bitów/s,
natomiast czas timeout wynosi 15ms. Konieczność uwzględnienia takiego stanu rzeczy
wiąże się z tym, iż HyperTerminal wysyła poszczególne bajty z odstępami czasowymi
około 12ms powodując, że zastosowanie czasu timeout równego pięć bajtów wiąże się
z wysłaniem ramki danych po odebraniu pojedynczego bajtu z portu szeregowego.
Odbiór danych radiowych sprowadza się do wykrycia poprawnej ramki danych. Jeśli
takowa zostanie przyjęta, podana liczba bajtów zostanie skierowana do portu
szeregowego.
16
HyperTerminal – program narzędziowy w systemie Microsoft Windows używany do łączenia się
między komputerami, które pracują pod kontrolą odmiennych systemów operacyjnych. Możliwe
sposoby połączenia obejmują połączenie modemowe (telefoniczne), bezpośrednie kablowe
poprzez łącze szeregowe oraz łącze TCP poprzez sieć lokalną lub rozległą.
37
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Modem może pracować w jednym z trzech trybów:
tryb spoczynku,
tryb nadawania danych,
tryb odbioru danych.
Przełączanie miedzy poszczególnymi trybami wykonywane jest automatycznie w
zależności od stanu sygnałów zewnętrznych.
O aktualnym stanie pracy urządzenia informują wbudowane w system diody LED.
Poprawną pracę modułu CC1000 sygnalizuje dioda żółta. Po włączeniu zasilania
podjęta zostaje próba kalibracji i gdy wszystko przebiegnie pomyślnie, dioda zostaje
zapalona. Jeżeli mimo próby włączenia dioda pozostaje zgaszona, oznacza to
niepoprawną pracę modułu. Dioda czerwona sygnalizuje tryb nadawania, dioda zielona
tryb odbioru danych.
Pierwotnie modem skonfigurowany jest do pracy z prędkością 9600 bitów przy użyciu
kodowania typu Manchester oraz z mocą nadawania równa +10dB. Wszystkie
parametry mogą zostać zmienione w zależności od wymagań danego systemu.
Konfiguracja radiomodemu wykonywana jest w dwojaki sposób. Mechanicznie poprzez
przełącznik ustawiane są parametry transmisji RS-232. W sposób programowy poprzez
dowolny terminal obsługujący port szeregowy konfigurowane są parametry toru
radiowego. Te drugie zapisywane są w nieulotnej pamięci, dlatego nie ma potrzeby
każdorazowego ich ustawiania po włączeniu zasilania [22].
Wszystkie sygnały transmisyjne oraz zasilania dostępne są na złączu szpilkowym.
Sposób ich podłączenia do portu szeregowego komputera przedstawiony jest na
rys. 4.5.
Rysunek 4.5 Opis sygnałów na złączu szpilkowym modemu i sposób ich podłączenia do złącza DB9.
Źródło: [22] s. 6.
38
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Do zasilania modemu należy stosować zasilacz o napięciu wyjściowym w granicach
6V-12V i wydajności prądowej około 100mA. Szybkość wybranej transmisji radiowej
wynosi 9600 bitów/s.
4.2.5 Charakterystyka złącza RS-232
Pomimo nieustannej presji ze strony użytkowników, ciągle brak jest
niekwestionowanego standardu w obszarze interfejsów medycznej aparatury
pomiarowej. Większość obecnie działających urządzeń wyposażona jest w prosty
interfejs RS-232. Jest to standard opracowany przez Electronic Industries Association
(EIA) definiujący interfejs do szeregowej transmisji danych pomiędzy DTE (data
terminal equipment) i DCE (data communication equipment), czyli pomiędzy
komputerem a modemem. W komputerach osobistych zaczęto go również stosować
do podłączenia urządzeń peryferyjnych. Dostępność RS-232 spowodowała, że standard
ten jest bardzo często stosowany do szeregowej transmisji danych wielu urządzeń, w
tym we wszelkiego rodzaju pomiarowych urządzeniach medycznych. Jednakże, każdy
producent sprzętu medycznego definiuje swoją własną składnię przesyłanych
komunikatów, publikując ją w instrukcji obsługi urządzenia. W związku z tym, bardzo
trudne jest przygotowanie oprogramowania nadzorującego stan pacjenta, które
obejmowałoby możliwość podłączenia każdego z urządzeń do monitorowania stanu
chorych znajdujących się w szpitalu. Ponadto RS-232 nie jest ani pod względem
parametrów mechanicznych, ani elektrycznych przystosowany do wielokrotnego w
ciągu doby podłączania różnych urządzeń medycznych do komputera zbierającego
dane, co jest wymaganiem podstawowym na oddziałach intensywnej terapii. Pomimo
tego RS-232 jest ciągle szeroko stosowany w urządzeniach medycznych [9].
Wymagania stawiane transmisji danych pomiędzy DTE a DCE określiły podstawowe
własności standardu. W związku z tym, że szybkość transmisji danych była ograniczona
poprzez parametry linii telekomunikacyjnych, standard określił maksymalną szybkość
transmisji na 20kb/s przez łącze niesymetryczne w trybie asynchronicznym lub
synchronicznym. Maksymalną odległość między DTE a DCE określono na 15 metrów.
Biorąc pod uwagę system monitorowania stanu pacjenta, zarówno odległość między
urządzeniami a komputerem, jak i szybkość przesyłania danych jest zazwyczaj zupełnie
wystarczająca. Szybkość równa 4800 bitów/s umożliwia przesyłanie około 400 znaków
alfanumerycznych na sekundę. Szybkość 9600 bitów/s powinna być wystarczająca do
przesyłania sygnału EKG w postaci cyfrowej.
Typowe wartości szybkości transmisji wynoszą odpowiednio: 1200, 2400, 4800 oraz
9600 bitów/s (bodów). Zarówno szybkość transmisji, jak również ilość bitów stopu,
ilość bitów danych, rodzaj parzystości lub jej brak jest określany przed nawiązaniem
połączenia.
39
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Przewód interfejsu najczęściej zakończony jest złączem 9- lub 25-stykowym typu
Canon. Standard definiuje zestaw wyprowadzeń, z których najczęściej wykorzystuje się
9 sygnałów przedstawionych w tab. 4.1.
W przypadku transmisji dwukierunkowej dane przesyłane są na liniach TxD oraz RxD.
Pozostałe wyprowadzenia pełnią rolę sygnałów kontrolnych i ich wykorzystanie jest
często pomijane w transmisji danych.
Oznaczenie
wyprowadzenia
Numer
wyprowadzenia na
złączu 9 stykowym
Kierunek sygnału
Znaczenie sygnału
DCD
1
do komputera
nośna wykryta
RxD
2
do komputera
dane odbierane
TxD
3
do komputera
dane nadawane
DTR
4
do komputera
komputer gotowy
SG
5
↔
masa sygnałowa
DSR
6
do komputera
gotowość modemu
RTS
7
do komputera
żądanie nadawania
CTS
8
do komputera
gotowość do nadawania
RI
9
do komputera
wskaźnik wywołania
Tabela 4.1 Organizacja wyprowadzeń na złączu interfejsu RS-232.
Źródło: [9].
Specyfikacja parametrów elektrycznych interfejsu RS-232 definiuje dwa poziomy
napięć:
napięcie ujemne (-3V ÷ -15V), reprezentujące logiczną „1” na liniach danych
(TxD, RxD) i logiczne „0” na liniach handshake’u,
napięcie dodatnie (3V ÷ 15V), reprezentujące logiczne „0” na liniach danych i
logiczne „1” na liniach handshake’u.
Zwykle urządzenia medyczne mają zaimplementowane komendy, po otrzymaniu
których przesyłają wyniki pomiarowe do komputera. Dzięki temu, można prowadzić
komputerową rejestrację stanu pacjenta. Wszelkie ustawienia parametrów przyrządu
należy jednak wykonać bezpośrednio w przyrządzie, gdyż nie jest praktykowane
wykorzystanie interfejsu RS-232 do sterowania lub ustawienia parametrów
pomiarowych urządzeń medycznych [23].
* * *
40
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Schemat elektryczny urządzenia przedstawiono na rys. 4.6 a widok płytki drukowanej
na rys 4.7.
41
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Rysunek 4.6 Schemat elektryczny urządzenia.
42
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Rysunek 4.7 Widok płytki drukowanej.
4.3 Budowa mechaniczna
Zaprojektowana płytka została zamknięta w metalowej obudowie podłączonej do
masy. W ten sposób udało się odizolować urządzenie i w konsekwencji zmniejszyć ilość
zakłóceń zewnętrznych (szczególnie składową pochodzącą od sieci energetycznej:
50 Hz).
Zdjęcie zaprojektowanego układu zostało przedstawione na rys. 4.8.
Rysunek 4.8 Zdjęcie wykonanej płytki modułu EKG.
43
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Na zewnątrz metalowej obudowy zostały wyprowadzone niezbędne sygnały. Na panelu
przednim, ukazanym na rys. 4.9, umieszczone zostały złącza trzech elektrod. Kolorem
czarnym oznaczono przyłącze elektrody zwrotnej.
Rysunek 4.9 Panel przedni modułu EKG.
Na panelu tylnym urządzenia, przedstawionym na rys. 4.10, umieszczono zasilanie oraz
złącze RS-232 służące do przekazywania informacji do nadajnika radiowego.
Rysunek 4.10 Panel tylny modułu EKG.
Do zasilania układu po stronie modułu EKG oraz nadajnika radiowego wykorzystywano
3 akumulatory niklowo-metalowo-wodorowe (NiMH, ang. nickel metal hydride). Po
stronie odbiornika radiowego wykorzystywano akumulatory lub zasilacz sieciowy17.
17
Wiązało się to z brakiem konieczności izolacji odbiornika od sieci elektrycznej.
44
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPIS
KONSTRUKCJI URZĄDZENIA
Oba moduły radiowe zostały zamknięte w plastikowych obudowach. Na zewnątrz
wyprowadzono złącze zasilające oraz port komunikacyjny RS-232. Na rys. 4.11
przedstawiono moduł nadajnika radiowego połączonego z zaprojektowaną płytką
(płytka jeszcze bez obudowy: zdjęcie z fazy testowej).
Rysunek 4.11 Moduł radiowy połączony z zaprojektowaną płytką modułu EKG (faza testowa).
W fazie testowania urządzenia wykorzystywano szereg różnych elektrod, np. elektrody
jednorazowe, elektrody zaciskowe AgCl, elektrody miedziane własnego wykonania.
Zdjęcie tych trzecich przedstawiono na rys. 4.12.
Rysunek 4.12 Zaprojektowane elektrody.
45
5
OPROGRAMOWANIE SYSTEMU
5.1 Program mikrokontrolera ATmega8
W
ramach pracy napisano program sterujący pracą mikrokontrolera ATmega8.
Implementacji dokonano w języku BASIC z wykorzystaniem środowiska
programistycznego dla mikrokontrolerów AVR o nazwie BASCOM AVR.
Kod źródłowy programu wraz z komentarzami zamieszczono poniżej.
$crystal = 3686400
$baud = 57600
$regfile = "M8def.dat"
'3686400 częstotliwość rezonatora
kwarcowego
'ustawienie prędkości transmisji łącza
szeregowego RS-232 do komputera 19200 max
'dołączenie definicji rejestrów procesora
AT90S8515
‘deklaracja zmiennych
Dim
Dim
Dim
Dim
Dim
Dim
Wynik As Word
Wynik2 As Word
Mlodszy As Byte
Starszy As Byte
Warunek As Byte
Wart As Word
Config Adc = Single , Prescaler = Auto , Reference = Avcc
Config Timer1 = Timer , Prescale = 8
'112.5 (225 Hz)
On Ovf1 Tim1_isr
Warunek = 0
Wart = 2304
'4608 = 100 próbek/s, 1536 = 300 próbek/s
Start Adc
Start Timer1
Enable Interrupts
Enable Timer1
46
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
Do
'wieczna pętla - główna pętla programu
Do
'pętla opóźnienia czasowego
SYSTEMU
Loop Until Warunek = 1
Wynik = Getadc(0)
Wynik2 = Wynik
Shift Wynik2 , Left , 1
Mlodszy = Low(wynik2)
Starszy = High(wynik2)
Shift Starszy , Left , 1
Starszy.0 = 1
Printbin Starszy
Waitus 2
Printbin Mlodszy
Warunek = 0
Loop
'koniec głównej pętli
'Procedura obsługi przerwania od przepełnienia timer1 (od 0 do 256=0)
Tim1_isr:
Timer1 = 65536 - Wart
Warunek = 1
Return
End
'koniec programu
Na początku programu dokonano inicjalizacji podstawowych parametrów urządzeń
peryferyjnych oraz przetwornika analogowo-cyfrowego. Ustawiono m.in. częstotliwość
pracy rezonatora kwarcowego, prędkość transmisji łącza szeregowego RS-232, tryb
działania przetwornika analogowo-cyfrowego. Dołączono również niezbędne definicje
do rejestrów procesora. Następną czynnością było zadeklarowanie używanych w
programie zmiennych oraz uruchomienie obsługi przerwań od licznika pierwszego
(Timer 1).
Główna procedura programu została umieszczona w wiecznej pętli. Po jej inicjalizacji,
program czeka na przerwanie od Timera 1 sprawdzając w pętli opóźnienia czasowego
wartość zmiennej odliczającej okres próbkowania. W momencie ustawienia zmiennej
dokonywane jest jej zerowanie oraz właściwy pomiar napięcia przetwornikiem ADC.
Na końcu programu umieszczono procedurę obsługi przerwania od przepełnienia
Timera 1.
47
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
SYSTEMU
Schemat blokowy algorytmu programu zamieszczono na rys. 5.1.
Inicjalizacja programu,
ustawień urządzeń peryferyjnych,
przetwornika analogowo-cyfrowego i
wartości zmiennych
Uruchomienie obsługi przerwań od
Timer1
Początek wiecznej pętli
Czy zmienna
odliczająca okres
próbkowania jest
ustawiona?
NIE
(przerwanie od Timer1)
TAK
Wykonaj pomiar napięcia
przetwornikiem ADC i prześlij wynik
po łączu szeregowym
Wyzeruj zmienną odliczającą okres
próbkowania
Rysunek 5.1 Schemat blokowy algorytmu pracy mikrokontrolera ATmega8 w urządzeniu.
Opracowanie własne.
5.2 Program akwizycyjny na komputer PC
W ramach pracy napisano program akwizycyjny na komputer PC. Zadaniem tego
programu napisanego w języku C++, a skompilowanego w środowisku Borland Builder
C++, jest odbieranie danych pomiarowych z urządzenia, ich wizualizacja oraz
archiwizacja.
48
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
SYSTEMU
Schemat blokowy algorytmu działania programu pokazano na rys. 5.2.
Inicjalizacja programu,
przypisanie zmiennym wartości
początkowych
Obsługa graficznego interfejsu
użytkownika
Zapisywanie do pliku
Otwarcie lub zamknięcie portu
szeregowego
Koniec zapisywania do pliku
Ustawienie parametrów pracy
portu szeregowego
(prędkość transmisji, numer
portu szeregowego)
Odbiór wartości pojedynczej próbki
danych z urządzenia
Wyświetlanie aktualnego sygnału na
ekranie
TAK
Czy koniec
akwizycji?
NIE
Rysunek 5.2 Schemat blokowy algorytmu programu akwizycyjnego.
49
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
SYSTEMU
Opracowanie własne.
Blok inicjalizacji programu zawiera funkcje tworzenia poszczególnych obiektów
aplikacji (np. okien, formularzy, przycisków etc.) oraz przypisania wartości
początkowych zmiennym globalnym. Funkcja otwierająca port szeregowy zawiera
wywołanie funkcji CreateFile z odpowiednimi parametrami:
hCommDev =
CreateFile(lpFileName, GENERIC_READ
NULL, OPEN_EXISTING, 0, NULL);
|
GENERIC_WRITE,
0,
gdzie:
lpFileName – zmienna typu LPCTSTR zawierająca wskaźnik do nazwy portu.
Ustawienie parametrów pracy portu szeregowego dokonywane jest wywołaniem
funkcji:
SetCommState(hCommDev, &dcb);
gdzie:
hCommDev
&dcb
– uchwyt do portu szeregowego,
– wskaźnik do struktury zawierającej parametry pracy portu szeregowego.
Przykładowe ustawienia wybranych parametrów pokazano poniżej:
dcb.Parity = NOPARITY;
// brak bitu parzystości
dcb.StopBits = ONESTOPBIT;
// 1 bit stopu
dcb.ByteSize = 8;
// 8 bitów danych
Wysłanie bajtu do portu szeregowego dokonywane jest funkcją:
BOOL WriteFile
(
HANDLE hFile,
// uchwyt do pliku docelowego
LPCVOID lpBuffer,
// wskaźnik danych zapisu do pliku
DWORD nNumberOfBytesToWrite, // liczba bajtów do zapisania
LPDWORD lpNumberOfBytesWritten,
LPOVERLAPPED lpOverlapped
//wskaźnik do liczby
zapisanych bajtów
// wskaźnik do struktury w
przypadku nałożenia I/O
);
50
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
SYSTEMU
Czytanie danych z portu szeregowego dokonywane jest funkcją:
BOOL ReadFile
(
HANDLE hFile,
// uchwyt do odczytywanego pliku
LPVOID lpBuffer,
// adres buforu z odczytanymi danymi
DWORD nNumberOfBytesToRead,
// liczba bajtów do odczytu
LPDWORD lpNumberOfBytesRead, // adres liczby bajtów do odczytu
LPOVERLAPPED lpOverlapped
// adres struktury danych
);
Czytanie pierwszego bajtu próbki z urządzenia dokonywane jest funkcją:
ReadFile(hCommDev,&p1,1,&il,NULL);
gdzie:
p1 – zmienna typu unsigned char
Jeżeli najmłodszy bit tego bajtu jest równy 1 oznacza to, że jest to starszy bajt (a ściślej:
starsze bity 10-bitowego wyniku) i można przejść do czytania drugiego, młodszego
bajtu.
Czytanie drugiego bajtu próbki z urządzenia dokonywane jest funkcją:
ReadFile(hCommDev,&p2,1,&il,NULL);
gdzie:
p2
– zmienna typu unsigned char.
Obliczenie wartości próbki na podstawie dwóch odczytanych próbek dokonywane jest
przy pomocy ciągu instrukcji:
p2 = p2 >> 1;
// Przesunięcie młodszego bajtu o jeden bit w prawo
p1 = p1 >> 1;
// Przesunięcie starszego bajtu o jeden bit w prawo
w = p1;
// przypisanie zmiennej w (wynik) wartości p1
w = w << 7;
// przesunięcie zmiennej wynik o 7 pozycji w lewo,
czyli przemnożenie przez 128
51
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
w = w + p2;
OPROGRAMOWANIE
SYSTEMU
// dodanie młodszego bajtu celem uzyskania
ostatecznego wyniku na liczbie typu int.
Wyrysowanie mierzonego przebiegu na ekranie komputera dokonywane jest ciągiem
instrukcji:
Form1->PaintBox1->Canvas->Brush->Color = clBlack;
// ustawienie koloru pędzla
Form1->PaintBox1->Canvas->LineTo(x,Y_WYKRES-w*0.25);
// narysowanie odcinka łączącego ostatnią i przedostatnią próbkę.
Stała Y_WYKRES określa pozycję linii bazowej (zerowej) w obszarze roboczym (Canvas)
obiektu PaintBox1, umieszczonego na formularzu (głównym oknie aplikacji) Form1.
Zapisywanie wyników do pliku realizowane jest wtedy, gdy użytkownik wybierze opcję
zapisuj_do_pliku i ustawi wartość zmiennej czy_zapisywać na true. Odpowiedni
fragment kodu pokazano poniżej:
if(czy_zapisywac)
{
ofstream outfile("dane.txt", ios::app);
if (!outfile) MessageBox(NULL,"Blad otwarcia pliku.","Blad",0x30);
outfile << w << endl;
outfile.close();
}
Widok głównego okna aplikacji pokazano na rys. 5.3.
52
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
OPROGRAMOWANIE
SYSTEMU
Rysunek 5.3 Widok głównego okna aplikacji na komputer PC.
Opracowanie własne.
53
6
WYNIKI TESTÓW URZĄDZENIA
P
raca wykonywana była wieloetapowo. Najprościej przebieg konstrukcji, realizację
oraz testowanie urządzenia można podzielić na następujące fazy:
wykonanie schematu oraz płytki układu EKG,
zakup i montaż elementów,
wstępne uruchomienie i testowanie poszczególnych elementów składowych
urządzenia (wykorzystanie programu HyperTerminal),
testowanie urządzenia sprzężonego z komputerem przy pomocy łącza RS-232
(łącze po kablu) z izolacją galwaniczną pacjenta przy pomocy transoptorów,
testowanie łącza radiowego przy pomocy dwóch komputerów PC,
testowanie łącza radiowego pomiędzy urządzeniem a komputerem PC,
testowanie urządzenia z łączem radiowym i ostateczną wersją oprogramowania
na komputer PC.
W ramach testów łącza radiowego wykorzystano dwa moduły CC1000, podłączone do
dwóch komputerów PC przy pomocy łączy szeregowych typu RS-232. Jako program
nadawczo-odbiorczy zastosowano aplikację systemową HyperTerminal. Pierwszy z
komputerów pracował w systemie operacyjnym Windows 98SE, drugi w systemie
Windows Me. Późniejsze testy przeprowadzane były również na komputerach z
systemami Windows XP. Testy odbywały się z szybkością transmisji radiowej
9600 bitów/s, zaś pomiędzy komputerami a radiomodemami szybkość wynosiła
57 600 bitów/s. Wyniki testów wypadły pomyślnie.
Kolejnym rodzajem badań było podłączenie do radiomodemu skonstruowanego
urządzenia i odbiór danych w postaci tekstowej na komputerze, do którego podłączono
drugi radiomodem. Testy te dowiodły prawidłowej współpracy odbiornika EKG z
radiomodemem.
Ostatnim rodzajem badań było zastosowanie programu akwizycyjnego P_ECG, który
odbierał dane z urządzenia w postaci binarnej, co umożliwiło zwiększenie liczby
54
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU
UKŁADU KRĄŻENIA
WYNIKI
TESTÓW URZĄDZE NIA
przesyłanych próbek w ciągu 1 s. Przykładowe, zarejestrowane w jednym kanale
przebiegi EKG pokazano na rys. 6.1 oraz rys. 6.2.
Rysunek 6.1 Przykładowy pomiar sygnału EKG.
Opracowanie własne.
Rysunek 6.2 Przykładowy sygnał EKG zmierzony urządzeniem pracującym z łączem radiowym.
Opracowanie własne.
55
7
PODSUMOWANIE I WNIOSKI
C
elem pracy było zaprojektowanie i wykonanie bezprzewodowego urządzenia do
monitorowania stanu układu krążenia – jednokanałowego układu EKG. Sygnał
biologiczny miał być transmitowany drogą radiową do komputera PC, gdzie miała
następować jego akwizycja.
Cel pracy udało się zrealizować. Wykonane urządzenie pozwala na dokonywanie
pomiarów elektrokardiograficznych, bezprzewodowe przekazywanie zebranych
sygnałów oraz ich wizualizację na ekranie komputerowym. Poszczególne elementy
systemu zostały wykonane w sposób modułowy, co umożliwia dobranie
odpowiedniego zestawienia do konkretnej sytuacji badawczej (można np. wymienić
moduł transmisji radiowej przy zachowaniu dotychczasowego urządzenia zbierającego
informację bioelektryczną serca). Komunikacja odbiornika radiowego z komputerem
PC odbywa się poprzez powszechnie dostępne łącze szeregowe, co wiąże się z brakiem
większych przeciwwskazań do używania skonstruowanego układu EKG w większości
gospodarstw domowych. Oprogramowanie wspierające pracę urządzenia
przystosowane jest do pracy w popularnym środowisku Windows.
W wyniku kilkumiesięcznej pracy udało się przygotować projekt, urządzenie i
oprogramowanie oraz dokonać niezbędnych testów potwierdzających spełnienie
postawionych w pracy wymagań. Pewna nadmiarowość i modyfikowalność części
składowych projektu pozwala na dalszą rozbudowę urządzenia, a możliwość adaptacji
oprogramowania w już istniejącym układzie gwarantuje, że czas życia systemu będzie
odpowiednio długi.
7.1 Koszt urządzenia
Koszt całego urządzenia związany jest głównie z trzema grupami wydatków:
zakup modułów radiowych,
wyprodukowanie płytki modułu EKG,
zakup elementów składowych płytki modułu EKG.
56
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
PODSUMOWANIE
I WNIOSK I
Cena jednego modułu radiowego waha się w okolicach 250 zł. W pracy zastosowano
dwa takie urządzenia (jeden jako nadajnik oraz drugi jako odbiornik). Wyprodukowanie
płytki EKG to koszt około 100 zł, biorąc pod uwagę zakup detaliczny. Przy produkcji
seryjnej (od 1000 sztuk), cena zmniejszyłaby się do 30 zł za sztukę. Elementy potrzebne
do montażu płytki EKG to koszt około 100 zł, przy czym najdroższy w tej grupie jest
układ scalony zintegrowanego wzmacniacza AD620 (około 30 zł).
7.2 Możliwości rozbudowy
Możliwości rozbudowy zaproponowanej konstrukcji są różnorodne. Można zastanowić
się nad zmianą koncepcji przesyłania informacji bezprzewodowej (np. Bluetooth). Inne
rozwiązanie radiowe pozwoliłyby na zwiększenie prędkości transmisji danych (powyżej
9600 bitów/s) a co za tym idzie, możliwe stanie się dołączenie większej ilości kanałów
zbierających. Bluetooth pozwoliłby również na zmniejszenie kosztów urządzenia
poprzez zakup wyspecjalizowanego nadajnika i dużo tańszego odbiornika.
Można również zastanowić się nad wprowadzeniem sprzętowej filtracji sygnału (np.
adaptacyjnej), która zasadniczo mogłaby poprawić jakość uzyskiwanego
elektrokardiogramu.
Zastosowanie innego, wydajniejszego systemu wzmocnienia sygnału biologicznego,
pozwoliłoby zamienić zaprojektowane urządzenie do badania stanu układu krążenia na
system monitorowania sygnałów elektrycznych pochodzących od mięśni w czasie ich
pracy (elektromiograf).
57
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
SPIS RYSUNKÓW
Rysunek 2.1
Amplitudy oraz zakresy widmowe częstotliwości niektórych
biosygnałów ...........................................................................................................................12
Rysunek 2.2
Układ bodźcotwórczo-przewodzący oraz przebiegi elektryczne w
różnych częściach serca.....................................................................................................15
Rysunek 2.3
Jeden okres elektrokardiogramu zdrowego człowieka........................................17
Rysunek 2.4
Powstawanie elektrokardiogramu w zestawieniu z pracą mięśnia
sercowego ...............................................................................................................................19
Rysunek 2.5
Odprowadzenia konwencjonalnej elektrokardiografii klinicznej ...................21
Rysunek 2.6
Rozmieszczenie i sposób podłączenia odprowadzeń przedsercowych ........24
Rysunek 3.1
Schemat blokowy koncepcji systemu do monitorowania stanu pacjenta ....28
Rysunek 4.1
Schemat blokowy systemu do monitorowania stanu pacjenta .........................32
Rysunek 4.2
Schemat aplikacyjny układu AD620.............................................................................34
Rysunek 4.3
Moduł CC1000 (widok z góry) ........................................................................................36
Rysunek 4.4
Gniazdo typu SMA (żeńskie)............................................................................................36
Rysunek 4.5
Opis sygnałów na złączu szpilkowym modemu i sposób ich
podłączenia do złącza DB9 ...............................................................................................38
Rysunek 4.6
Schemat elektryczny urządzenia ...................................................................................42
Rysunek 4.7
Widok płytki drukowanej .................................................................................................43
Rysunek 4.8
Zdjęcie wykonanej płytki modułu EKG .......................................................................43
Rysunek 4.9
Panel przedni modułu EKG ..............................................................................................44
Rysunek 4.10
Panel tylny modułu EKG....................................................................................................44
Rysunek 4.11
Moduł radiowy połączony z zaprojektowaną płytką modułu EKG (faza
testowa) ...................................................................................................................................45
Rysunek 4.12
Zaprojektowane elektrody ...............................................................................................45
Rysunek 5.1
Schemat blokowy algorytmu pracy mikrokontrolera ATmega8 w
urządzeniu ..............................................................................................................................48
Rysunek 5.2
Schemat blokowy algorytmu programu akwizycyjnego......................................49
Rysunek 5.3
Widok głównego okna aplikacji na komputer PC ...................................................53
Rysunek 6.1
Przykładowy pomiar sygnału EKG ...............................................................................55
Rysunek 6.2
Przykładowy sygnał EKG zmierzony urządzeniem pracującym z
łączem radiowym .................................................................................................................55
58
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
SPIS TABEL
Tabela 2.1
Prędkości przenoszenia się depolaryzacji w układzie przewodzącym i
w mięśniu sercowym ..........................................................................................................16
Tabela 2.2
Średni czas trwania poszczególnych załamków, odcinków i odstępów
w EKG ........................................................................................................................................19
Tabela 3.1
Parametry standardu IrDA ...............................................................................................29
Tabela 4.1
Organizacja wyprowadzeń na złączu interfejsu RS-232 ......................................40
59
B EZPRZEWODOWE URZĄDZENIE DO MONITOROWANIA STANU UKŁADU KRĄŻENIA
LITERATURA
[1]
Analog Devices, AD620 Datasheet (Rev. E), 1999.
[2]
Atmel Corporation, ATmega8, ATmega8L Datasheet, 2006.
[3]
Baranowski R., Mikrokontrolery AVR ATmega w praktyce, Warszawa 2005.
[4]
Barold S., Willem Einthoven and the Birth of Clinical Electrocardiography a Hundred
Years Ago, „Cardiac Electrophysiology Review”, 2003 nr 7.
[5]
Berbari E. J., Principles of Electrocardiography, [w:] Biomedical Engineering Fundamentals, red. Bronzino J. D., Boca Raton 2006, „Biomedical Engineering HandBook”, Third
Edition.
[6]
Biopomiary, red. Filipczyński L., Torbicz W., Warszawa 1990, „Problemy biocybernetyki i
inżynierii biomedycznej”, tom 2.
[7]
Geddes L. A., The Electrocardiograph (Historical Perspectives 2), [w:] The Biomedical Engineering Handbook: Second Edition, red. Bronzino J. D., Boca Raton 2000.
[8]
Jagielski J., Laszki-Szcząchor K., Rusiecki L., Automatyczna analiza i interpretacja
diagnostyczna elektrokardiogramów z 12 odprowadzeń klasycznych, [w:] Biosystemy,
red. Jagielski J., Zmysłowski W., Warszawa 1991, „Problemy biocybernetyki i inżynierii
biomedycznej”, tom 1.
[9]
Jasiński P., Interfejsy medycznej aparatury pomiarowej, [w:] Biopomiary, red. Torbicz W.
i in., Warszawa 2001, „Biocybernetyka i inżynieria biomedyczna 2000”, tom 2.
[10] Kępski R. i in., Wybrane procedury przetwarzania sygnałów elektrokardiograficznych,
[w:] Biopomiary, red. Torbicz W. i in., Warszawa 2001, „Biocybernetyka i inżynieria
biomedyczna 2000”, tom 2.
[11] Komputerowe wspomaganie obrazowej diagnostyki medycznej, red. Przelaskowski A.,
Warszawa 2006.
[12] Kulka Z., Nadachowski M., Zastosowania wzmacniaczy operacyjnych, Warszawa 1986.
[13] Latos S., Gacek A., Podstawy bezpieczeństwa elektrycznego w technice medycznej, [w:]
Biopomiary, red. Torbicz W. i in., Warszawa 2001, „Biocybernetyka i inżynieria
biomedyczna 2000”, tom 2.
[14] MacKay R. S., Bio-Medical Telemetry: Sensing and Transmitting Biological Information
from Animals and Man (2nd Edition), New York 1998.
60
B EZPRZEWODOWE URZĄDZENIE DO MONITO ROWANIA STANU UKŁADU
KRĄŻENIA
LITERATURA
[15] Mączyński A., Standardy przesyłania informacji multimedialnych, [w:] Systemy
komputerowe i teleinformatyczne w służbie zdrowia, red. Kącki E. i in., Warszawa 2002,
„Biocybernetyka i inżynieria biomedyczna 2000”, tom 7.
[16] Moczko J., Kramer L., Cyfrowe metody przetwarzania sygnałów biomedycznych, Poznań
2001.
[17] Nagel J. H., Biopotential Amplifiers, [w:] Medical Devices and Systems, red. Bronzino J.
D., Boca Raton 2006, „Biomedical Engineering HandBook”, Third Edition.
[18] Neuman M. R., Biopotential Electrodes, [w:] Medical Devices and Systems, red. Bronzino
J. D., Boca Raton 2006, „Biomedical Engineering HandBook”, Third Edition.
[19] Northrop R. B., Analysis and Aplication of Analog Electronic Circuits to Biomedical Instrumentation, Boca Raton 2004, „Biomedical Engineering Series”.
[20] Pawlicki G., Podstawy inżynierii medycznej, Warszawa 1997.
[21] Reilly J. P., Geddes L. A., Polk C., Bioelectricity, [w:] The Electrical Engineering Handbook,
red. Dorf R. C., Boca Raton 2000.
[22] Soyter Components, CC1000 – Radiomodem DIP SWITCH Datasheet, 2006.
[23] Texas Instruments, MAX232, MAX232I (Rev. L) Datasheet, 15 Mar 2004.
[24] Thakor N. V., Biopotencials and Electrophysiology Measurement, [w:] Measurement, Instrumentation and Sensors Handbook, red. Webster J. G., Boca Raton 1999.
[25] Traczyk W. Z., Fizjologia człowieka w zarysie, Warszawa 2000.
[26] Wojciechowski D., Maniewski R., Topiński S., Postępy elektrokardiografii, [w:]
Biopomiary, red. Torbicz W. i in., Warszawa 2001, „Biocybernetyka i inżynieria
biomedyczna 2000”, tom 2.
[27] A (not so) brief history of electrocardiography, http://www.ecglibrary.com/ecghist.html;
dostęp: 1 czerwca 2007 r.
[28] http://bluetooth.com/bluetooth/; dostęp: 1 maja 2007 r.
[29] http://irda.org/; dostęp: 1 maja 2007 r.
61