Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Modelowanie i podstawy identyfikacji
- studia stacjonarne
Kazimierz Duzinkiewicz, dr hab. Inż.
Katedra Inżynierii Systemów Sterowania
Wykład 6+7 - 2015/2016
Modele fenomenologiczne - linearyzacja
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
1
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Linearyzacja
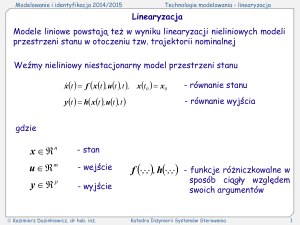
Modele liniowe powstają też w wyniku linearyzacji nieliniowych modeli
zarówno wejście – wyjście jak i przestrzeni stanu w otoczeniu tzw.
trajektorii nominalnej
Skupimy się najpierw na modelach przestrzeni stanu
Weźmy nieliniowy niestacjonarny model przestrzeni stanu
x t f x t , ut ,t , x t0 x0
- równanie stanu
y t h x t , ut ,t
- równanie wyjścia
gdzie
x n
- stan
up
- wejście
y q
- wyjście
Kazimierz Duzinkiewicz, dr hab. inż.
f ,,, h,, - funkcje różniczkowalne w
sposób ciągły względem
swoich argumentów
Katedra Inżynierii Systemów Sterowania
2
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Trajektorię nominalną określa się w następujący sposób:
~t ,
Definicja trajektorii nominalnej: Dla nominalnego sygnału wejścia u
x t , to trajektoria która spełnia równanie
nominalna trajektoria stanu ~
stanu
~
~t ,t , ~
x t f ~
x t , u
x t0 ~
x0
a nominalna trajektoria wyjścia, to trajektoria, która
równanie wyjścia
~
~t ,t
y t h~
x t ,u
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
spełnia
3
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Jeżeli nominalna trajektoria wejścia jest stała
~t u const
u
x t x const , jeżeli
trajektoria stanu jest stanem równowagi, ~
spełnia równanie
0 f x ,u ,t
dla wszystkich t
Nominalna trajektoria wyjścia staje się trajektorią stałą, która
spełnia równanie
y h x ,u ,t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
4
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Ograniczymy się na tym wykładzie tylko do tego drugiego
przypadku
Odchylenia stanu ( w tym stanu początkowego), wejścia i wyjścia od
ich trajektorii nominalnych (równowagi) oznaczymy
x t x x t
x t x t x
u t ut u
y t y t y
x 0 x 0 x 0
ut u u t
y t y y t
x 0 x 0 x 0
Korzystając z powyższych oznaczeń – równanie stanu
x 0
x t x x t f x x t , u u t ,t
x t 0 x t f x x t , u u t ,t
Rozwijamy funkcję f w szereg Taylor’a w otoczeniu wartości
nominalnych
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
5
Modelowanie i podstawy identyfikacji 2015/2016
x t 0 x t f x , u ,t
Modele fenomenologiczne - linearyzacja
f
x , u ,t x t x
x
f
x , u ,t ut u R
u
Z definicji trajektorii
równowagi, stanu
nominalnej,
w
szczególności
trajektorii
0 f x ,u ,t
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych
rzędów są spełnione
f
x , u ,t x t
x
f
x , u ,t u t
u
x t
Zlinearyzowane równanie stanu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
6
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
x , u ,t x , u ,t n n
x
x j
f1
x x , u ,t
1
f 2 x , u ,t
x1
f
n x , u ,t
x1
f1
x , u ,t f1
x2
xn
f 2
x , u ,t f 2
x2
xn
f n
f n
x , u ,t
x2
xn
x , u ,t
x , u ,t
x , u ,t
A
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
7
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
x , u ,t x , u ,t n p
u
u j
f1
f1
x
,
u
,
t
u
u2
1
f 2 x , u ,t f 2
u1
u2
f n x , u ,t f n
u1
u2
B
x , u ,t
x , u ,t
x , u ,t
f1
x , u ,t
u p
f 2
x , u ,t
u p
f n
x , u ,t
u p
x t A x t B u t
Zlinearyzowane równanie stanu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
8
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Podobnie dla równania wyjścia
yt y y t h x x t , u u t ,t
Rozwijamy funkcję h w szereg Taylor’a w otoczeniu wartości
nominalnych
y t y y t
h x , u ,t
h
x , u ,t x t x
x
h
x , u ,t ut u R
u
Z definicji trajektorii nominalnej wyjścia
y h x ,u ,t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
9
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych
rzędów są spełnione
h
x , u ,t x t
x
h
x , u ,t u t
u
y t
Zlinearyzowane równanie wyjścia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
10
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
hi
h
x , u ,t x , u ,t q n
x
x j
h1
h1
h1
x
,
u
,
t
x
,
u
,
t
x
,
u
,
t
x
x2
xn
1
h
h
h
2
2
2 x , u ,t
x t , u ,t
x , u ,t
x1
x2
xn
h
hq
hq
q
x , u ,t
x , u ,t
x , u ,t
x2
xn
x1
C
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
11
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
hi
h
x , u ,t x , u ,t q p
u
u j
h1
u x , u ,t
1
h2 x , u ,t
u1
hq x , u ,t
u1
D
h1
x , u ,t h1
u2
u p
h2
x , u ,t h2
u2
u p
hq
h
x , u ,t q
u2
u p
x , u ,t
x , u ,t
x , u ,t
y t C x t D u t
Zlinearyzowane równanie wyjścia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
12
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Model szczególny trajektorii nominalnych – stała trajektoria wejścia,
trajektoria stanu = stan równowagi
Model zlinearyzowany w otoczeniu stanu równowagi
x t Ax t Bu t
x0 x0 x0
y t Cx t Du t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
13
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład 5a
Linearyzacja modelu stanu SPS z przykładu 4
1
Rw iw t uw t
f w x t , ut
iw t 1 Rw iw t u w t
Lw
Lw
1
it t 1 Rt it t G iw t t ut t f t x t , ut Rt it t G iw t t ut t
Lt
Lt
1
1
f m x t , ut G iw t it t M o t
t G iw t it t M o t
J
J
h xt t
a) wskazanie równowagowej trajektorii nominalnej – trajektorii równowagi
Wykazanie, że istnieją rozwiązania układu równań
Rw iw uw 0
Rt it G iw ut 0
G iw it M o 0
Kazimierz Duzinkiewicz, dr hab. inż.
Układ 3 równań algebraicznych nieliniowych z 6
niewiadomymi
Zakładamy: u w , ut , M o
Obliczamy: iw ,it ,
Katedra Inżynierii Systemów Sterowania
14
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Nietrudno pokazać, że takie rozwiązania istnieją, np.
uw
Mo
ut Rt it
iw
it
Rw
G iw
G iw
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
15
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f w x t , ut
b) obliczenie macierzy stanu A
f i
f
x , u ,t x , u ,t 3 3
A
x
x j
1
Rw iw t uw t
Lw
f t x t , ut
1
Rt it t G iw t t ut t
Lt
f m x t , ut
1
G iw t it t M o t
J
f w
f w
f w
x , u ,t
x , u ,t
x , u ,t
it
iw
f
f
f
t
t
x , u ,t
x , u ,t
t x , u ,t
iw
it
f
f
f
m
m
m
x , u ,t
x , u ,t
x , u ,t
it
iw
Rw
L
w
G
Lt
G i
t
J
Kazimierz Duzinkiewicz, dr hab. inż.
0
Rt
Lt
G iw
J
G iw
Lt
0
0
Katedra Inżynierii Systemów Sterowania
16
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f w x t , ut
c) obliczenie macierzy wejścia B
f i
f
x , u ,t x , u ,t 3 3
B
u
u j
f w
x , u ,t
u w
f
t x , u ,t
u w
f
m x , u ,t
u w
1
L
w
0
0
0
1
Lt
0
Kazimierz Duzinkiewicz, dr hab. inż.
1
Rw iw t uw t
Lw
f t x t , ut
1
Rt it t G iw t t ut t
Lt
f m x t , ut
1
G iw t it t M o t
J
f w
x , u ,t f w x , u ,t
ut
M o
f t
x , u ,t f t x , u ,t
ut
M o
f m
f m
x , u ,t
x , u ,t
ut
M o
0
0
1
J
Katedra Inżynierii Systemów Sterowania
17
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
d) zlinearyzowane równanie stanu
1
Rw iw t uw t
iw t
Lw
1
it t Rt it t G iw t t ut t
Lt
1
t G iw t it t M o t
J
Rw
iw , Lw
G
it ,
Lt
G it
J
0
Rt
Lt
G iw
J
x t Ax t Bu t
1
iw , Lw
G iw
it , 0
Lt
0
0
0
0
1
Lt
0
x0 x0 x0
0
u w ,
0 ut ,
M
1
J
iw ,0 , iw ,0 iw ,0 iw ,0 iw
it ,0 , it ,0 it ,0 it ,0 it
0 , 0 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
18
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
e) obliczenie macierzy wyjścia C
h xt t
hi
h
x , u ,t x , u ,t 1 3
C
x
x j
h
h
h
x , u ,t
x , u ,t
x , u ,t
i
i
t
w
0 0 1
f) obliczenie macierzy bezpośredniego przejścia D
hi
h
x , u ,t x , u ,t 1 3
D
u
u j
h
x , u ,t h x , u ,t h x , u ,t
ut
M o
u w
0 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
19
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
d) zlinearyzowane równanie wyjścia
h xt t
iw ,
uw ,
y 0 0 1 it , 0 0 0 ut ,
M
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
20
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Podsumowanie:
- zlinearyzowane równanie stanu
Rw
iw , Lw
G
it ,
Lt
G it
J
0
Rt
Lt
G iw
J
1
iw , Lw
G iw
it , 0
Lt
0
0
0
0
1
Lt
0
0
u w ,
0 ut ,
M
1
J
iw ,0 , iw ,0 iw ,0 iw ,0 iw
it ,0 , it ,0 it ,0 it ,0 it
0 , 0 0 0
- zlinearyzowane równanie wyjścia
iw ,
uw ,
y 0 0 1 it , 0 0 0 ut ,
M
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
21
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Podobnie można przedstawić linearyzację modeli wejście - wyjście
Weźmy nieliniowy niestacjonarny model wejście - wyjście
f y n , , y , um , , u,t 0
y 0 y0 , , y n 1 0 y0n 1
gdzie
u p - wejście
y - wyjście
q
Kazimierz Duzinkiewicz, dr hab. inż.
f ,, - funkcje różniczkowalne w
sposób ciągły względem
swoich argumentów
Katedra Inżynierii Systemów Sterowania
22
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Trajektorię nominalną określa się w analogiczny sposób:
~t ,
Definicja trajektorii nominalnej: Dla nominalnego sygnału wejścia u
nominalna trajektoria wyjścia ~
y t , modelu wejście - wyjście
spełnia równanie:
f ~y n , , ~y , u~ m , , u~ ,t 0
z warunkami początkowymi:
Kazimierz Duzinkiewicz, dr hab. inż.
~
y 0 ~
y0 , , ~
y n 1 0 ~
y0n 1
Katedra Inżynierii Systemów Sterowania
23
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Jeżeli nominalna trajektoria wejścia jest stała
~t u const
u
~
nominalna trajektoria wyjścia jest stała, y t y const , i spełnia
równanie
0 f y ,u ,t
dla wszystkich t
Z określenia trajektorii równowagi:
u u n y y m 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
24
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Odchylenia wejścia i wyjścia (i ich warunków początkowych) od ich
trajektorii równowagi oznaczymy
ut u u t
u t
u t
u t ut u
u t u t u u t
um t u m t u m u m t
y t y t y
y t y t y y t
yn t y n t y n y n t
u m t um t
y t y y t
y t
y t
y n t
yn t
u0 u0 u0
u 0 u 0 u 0 u 0
u m 10 u0m 1 u0m 1 u0m 1
y0 y0 y0
y 0 y 0 y 0 y 0
y n 10 y0n 1 y0n 1 y0n 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
25
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Korzystając z powyższych oznaczeń – równanie wejście - wyjście
0 f yn t , , y y t , u m t , , u u t ,t
Rozwijamy funkcję
nominalnych
f
w szereg Taylor’a w otoczeniu wartości
f
f
n
n
f
y
,
u
,
t
y
t
y
f y , u ,t y t y
n
y
y
f
f y , u ,t y t y
y
f
f
m
m
f
y
,
u
,
t
u
t
u
f y , u ,t u t u
m
u
u
f
f y , u ,t ut u
u
R
0 f y , u ,t
Biorąc pod uwagę
0 f y ,u ,t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
26
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych rzędów są spełnione
f
f
n
f
y
,
u
,
t
y
t
f y , u ,t y t
n
y
y
f
f y , u ,t y t
y
f
f
m
f
y
,
u
,
t
u
t
f y , u ,t u t
m
u
u
f
f y , u ,t u t 0
u
Zlinearyzowane równanie wejście - wyjście
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
27
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
n y , u ,t n y , u ,t q q
y
y j
f 1
f 1
f 1
y
,
u
,
t
y
,
u
,
t
y
,
u
,
t
y n
y2n
yqn
1
f 2 y , u ,t f 2 y , u ,t f 2 y , u ,t
y1n
y2n
yqn
f
f
f
q
q
q y , u ,t
y
,
u
,
t
y , u ,t
n
n
n
y1
y2
yq
M n
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
28
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
y , u ,t y , u ,t q q
y
y j
f 1
y y , u ,t
1
f 2 y , u ,t
y 1
f q y , u ,t
y 1
M 1
Kazimierz Duzinkiewicz, dr hab. inż.
f 1
y , u ,t f1
y 2
y q
f 2
y , u ,t f 2
y 2
y q
f q
f
y , u ,t q
y 2
y q
y , u ,t
y , u ,t
y , u ,t
Katedra Inżynierii Systemów Sterowania
29
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
y , u ,t y , u ,t q q
y
y j
f 1
y y , u ,t
1
f 2 y , u ,t
y1
f q y , u ,t
y1
M 0
Kazimierz Duzinkiewicz, dr hab. inż.
f 1
y , u ,t f1
y2
yq
f 2
y , u ,t f 2
y2
yq
f q
f
y , u ,t q
y2
yq
y , u ,t
y , u ,t
y , u ,t
Katedra Inżynierii Systemów Sterowania
30
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
m y , u ,t m y , u ,t q p
u
u j
f 1
f 1
f 1
y
,
u
,
t
y
,
u
,
t
y
,
u
,
t
u m
u2m
u pm
1
f
f
f
2 y , u ,t
2
2
y , u ,t
y , u ,t
m
m
m
u1
u2
u p
f
f
f
q
q
q
y , u ,t
y , u ,t
y , u ,t
m
m
m
u1
u2
u p
N m
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
31
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
y , u ,t y , u ,t q p
u
u j
f 1
f 1
y
,
u
,
t
u
u2
1
f 2 y , u ,t f 2
u1
u2
f q y , u ,t f q
u1
u2
N 1
Kazimierz Duzinkiewicz, dr hab. inż.
y , u ,t
y , u ,t
y , u ,t
f 1
y , u ,t
u p
f 2
y , u ,t
u p
f q
y , u ,t
u p
Katedra Inżynierii Systemów Sterowania
32
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f i
f
y , u ,t y , u ,t q p
u
u j
f 1
f 1
y
,
u
,
t
u
u2
1
f 2 y , u ,t f 2
u1
u2
f q y , u ,t f q
u1
u2
N 0
Kazimierz Duzinkiewicz, dr hab. inż.
y , u ,t
y , u ,t
y , u ,t
f 1
y , u ,t
u p
f 2
y , u ,t
u p
f q
y , u ,t
u p
Katedra Inżynierii Systemów Sterowania
33
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
M n yn t M 1 y t M 0 y t
t N 0 u t 0
N m um t N 1 u
Zlinearyzowane równanie wejście - wyjście
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
34
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład 5b
Linearyzacja modelu stanu SPS z przykładu 4
1
Rw iw t uw t
iw t
Lw
1
it t Rt it t G iw t t ut t
Lt
1
t G iw t it t M o t
J
f w yt , y t , ut Lw iw t Rw iw t u w t
f t yt , y t , ut Lt it t Rt it t G iw t t ut t
f m yt , yt , ut J t G iw t it t M o t
Musimy policzyć M(1) , M(0) oraz N(0)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
35
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f w yt , y t , ut Lw iw t Rw iw t u w t
f t yt , y t , ut Lt it t Rt it t G iw t t ut t
f m yt , yt , ut J t G iw t it t M o t
M
1
f i
f
y , u ,t y , u ,t 3 3
y
y j
f w
y , u ,t
iw
f
t y , u ,t
iw
f
m y , u ,t
iw
Lw 0 0
0 Lt 0
0 0 J
Kazimierz Duzinkiewicz, dr hab. inż.
f w
y , u ,t
it
f t
y , u ,t
it
f m
y , u ,t
it
f w
y , u ,t
f t
y , u ,t
f t
y , u ,t
Katedra Inżynierii Systemów Sterowania
36
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f w yt , y t , ut Lw iw t Rw iw t u w t
f t yt , y t , ut Lt it t Rt it t G iw t t ut t
f m yt , yt , ut J t G iw t it t M o t
M 0
f
y , u ,t f i y , u ,t 3 3
y
y j
f w
f w
y , u ,t
t
,
u
,
y
it
iw
f t
f
y , u ,t
t y , u ,t
iw
it
f
m y , u ,t f m y , u ,t
it
iw
0
0
Rw
G iw
Rt
G
G i G i
0
w
t
Kazimierz Duzinkiewicz, dr hab. inż.
f w
y , u ,t
f t
y , u ,t
f t
y , u ,t
Katedra Inżynierii Systemów Sterowania
37
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
f w yt , y t , ut Lw iw t Rw iw t u w t
f t yt , y t , ut Lt it t Rt it t G iw t t ut t
f m yt , yt , ut J t G iw t it t M o t
N 0
f
y , u ,t f i y , u ,t 3 3
u
u j
f w
y , u ,t
u w
f
t y , u ,t
u w
f
m y , u ,t
u w
f w
y , u ,t f w y , u ,t
ut
M o
f t
f t
y , u ,t
y , u ,t
ut
M o
f m
f t
y , u ,t
y , u ,t
ut
M o
1 0 0
0 1 0
0 0 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
38
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Podsumowanie:
- zlinearyzowane równanie wejście – wyjście: postać macierzowa
M 1 y t M 0 y t N 0 u t 0
Lw
0
0
0
Lt
0
0 iw ,
0 it ,
J
Rw
G
G i
t
0
Rt
G iw
0 iw ,
G iw it ,
0
1
0
0
0
1
0
0 u w ,
0 ut ,
1 M o ,
0
- zlinearyzowane równanie wejście – wyjście: postać zwykła
Lw iw , Rw iw , 1 u w , 0
Lt it , G iw , Rt it , G iw 1 ut , 0
J G it iw , G iw M o , 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
39
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Kategorie otrzymanego modelu
parametryczny
dynamiczny
ciągły
liniowy
o parametrach skupionych
stacjonarny
deterministyczny
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
40
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Modyfikacje modelu podsystemu mechanicznego
Moment oporowy dzielony często na dwie części:
wewnętrzny – opory strat samego wirnika
zewnętrzny – od urządzenia napędzanego
M o t M ow t M oz t
Zasadnicza składowa momentu oporowego wewnętrznego – moment oporowy tarcia
lepkiego
M ow t D t
gdzie, D – współczynnik tarcia lepkiego
Równanie momentu oporowego przyjmie w takim przypadku postać:
M o t D t M oz t
Gdyby interesowało nas położenie wału silnika wyprowadzone modele należy uzupełnić o
t
d t
t
dt
gdzie, Θ – położenie kątowe wału silnika
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
41
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Dziękuję
– koniec materiału prezentowanego podczas wykładu
Inne przykłady modeli – Dodatek A
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
42
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Dodatek A
Systemy mechaniczne – przykładowe modele
Przykład D-1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
43
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
44
Modelowanie i podstawy identyfikacji 2015/2016
M y
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
M y
Katedra Inżynierii Systemów Sterowania
45
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-2
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
46
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
47
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-3
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
48
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
49
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
50
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Systemy elektryczne – przykładowe modele
Przykład D-4
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
51
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
52
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-5
uwe t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
53
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-6
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
54
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
55
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Z drugiego z ostatnich równań
u we 2 t R2C f 2
du wy t
dt
R2
u wy 2 t
Rf 2
Podstawiając do pierwszego i porządkując otrzymamy
R f 1C f 1 R f 2C f 2
d 2u wy t
dt 2
R f 1C f 1 R f 2C f 2
Kazimierz Duzinkiewicz, dr hab. inż.
Rf 1 Rf 2
R1 R2
du wy t
dt
u wy t
u we t
Katedra Inżynierii Systemów Sterowania
56
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Ustalanie warunków początkowych – przykłady:
systemy elektryczne
W dotychczas przedstawionych przykładach nie skupialiśmy uwagi na
określaniu wartości warunków początkowych dla otrzymywanych r.r.
modelu, gdyż w przykładach tych ich określenie nie powinno
nastręczać trudności. Spotkać można jednak zadania w których
określenie warunków początkowych wymaga pewnego skupienia.
Podamy przykłady takich zadań zaczerpnięte z elektrotechniki
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
57
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przydatne przy określaniu warunków początkowych wskazówki
Przypomnijmy zależności wiążące wartości napięcia i prądu na
podstawowych elementach układów elektrycznych
iR
uR
u R t
iR t
u R t iR t R
R
- możliwa skokowa zmiana prądu
- możliwa skokowa zmiana napięcia
duC
1
uC t iC d iC t C
C0
d t
t
iC
uC
- możliwa skokowa zmiana prądu
- niemożliwa skokowa zmiana napięcia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
58
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
iL
1
u L t L
iL t uL d
d t
L0
t
iL
uL
- możliwa skokowa zmiana napięcia
- niemożliwa skokowa zmiana prądu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
59
Modelowanie i podstawy identyfikacji 2015/2016
Przykład WP-1
L
Modele fenomenologiczne - linearyzacja
iL(t)
uL (t)
u(t)
P
C
uC (t)
uR1 (t)
R1
R2
uR2 (t)
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili t=0- tuż
przed przełączeniem
przełącznika P, w obwodzie panuje stan
ustalony. W chwili t = 0 zostaje przełączony przełącznik P zgodnie
ze strzałką na rysunku. Zbudować model matematyczny pozwalający
badać zależność przebiegu napięcia na kondensatorze C oraz prądu
pobieranego ze źródła
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
60
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Model systemu
d 2uC t L duC t
LC
uC t u t 0
dt
R2 dt
Potrzebne warunki początkowe
uC 0
duC 0
?
dt
?
Dla wejściowego oczka, dla każdej chwili t
ut uL t uC t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
61
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
W szczególności
u0 u0 u0 E E 0
uL 0 uL 0 uL 0 uL 0
uC 0 uC 0 uC 0 0 uC 0 uC 0 E
Stąd
uC 0 E
oraz
u L 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
62
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Dalej
duC 0 1
iC 0
dt
C
Prąd i nie może zmienić się skokowo („nagle”) a jego wartość jest
równa
it iC t iRo t
Mamy
i0 i0 i0 0
iC 0 iC 0 iC 0 iC 0
u
0
u
0
u
0
u
0
R2
R1
iRo 0 iR0 0 iR0 0
R2
R1
R2
R1
E E
R2 R1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
63
Modelowanie i podstawy identyfikacji 2015/2016
Zatem
Modele fenomenologiczne - linearyzacja
E E
0 iC 0
R2 R1
E E
iC 0
R1 R2
i ostatecznie
duC 0 1
1 E E E R2 R1
iC 0
dt
C
C R1 R2 C R1 R2
duC 0 E R2 R1
dt
C R1 R2
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
64
Modelowanie i podstawy identyfikacji 2015/2016
Przykład WP-2
i (t)
W
Modele fenomenologiczne - linearyzacja
io (t)
iC (t)
uw (t)
u(t)
C
uC (t)
L0
uL (t)
uR (t)
R0
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili tuż
przed wyłączeniem (t=0-) wyłącznika W w obwodzie panował stan
ustalony. W chwili t = 0 zostaje wyłączony wyłącznik W. Zbudować
model matematyczny pozwalający badać zależność przebiegu napięcia
na zaciskach wyłącznika uw (t) przy zadanym napięciu u(t)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
65
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Model systemu
d 2uW t
duW t
LoC
RoC
uW t ut 0
dt
dt
Potrzebne warunki początkowe
uW 0
duW 0
?
dt
?
Napięcie na kondensatorze nie może się skokowo zmienić, więc
uC 0 uC 0 u 0 E
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
66
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Napięcie na wyłączniku
uW t ut uC t
Równanie spójności dla wejściowego oczka, dla chwil przed
wyłączeniem
ut uC t
Stąd
uW 0 u 0 uC 0 E E 0
uW 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
67
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
duW 0 d
u 0 uC 0
dt
dt
Mamy zależność
duC 0 1
iC 0
dt
C
Ponieważ
oraz
it io t iC t 0
E
u
0
i0 i 0 i 0 0
Ro
Ro
u 0 E
io 0 io 0 io 0 0 io 0 io 0
Ro
R0
iC 0 iC 0 iC 0 iC 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
68
Modelowanie i podstawy identyfikacji 2015/2016
Stąd
Modele fenomenologiczne - linearyzacja
u
0
E
iC 0
Ro
Ro
Ponieważ
duW 0 d
du
0
d
C
u 0 uC 0 E uC 0
dt
dt
dt
dt
duC 0 1
iC 0
dt
C
Stąd
Kazimierz Duzinkiewicz, dr hab. inż.
duW 0
1
E
dt
RoC
Katedra Inżynierii Systemów Sterowania
69
Modelowanie i podstawy identyfikacji 2015/2016
Przykład WP-3
i (t)
R
uR (t)
u(t)
Modele fenomenologiczne - linearyzacja
L
uL (t)
uRo (t)
iR (t)
R0
iC (t)
uC (t)
C
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili tuż
przed wyłączeniem (t=0- ) wyłącznika W w obwodzie panował stan
ustalony. W chwili t = 0 zostaje wyłączony wyłącznik W. Zbudować
model matematyczny pozwalający badać zależność przebiegu napięcia
na zaciskach odbiornika Ro przy zadanym napięciu u(t)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
70
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Model systemu
d 2uC t
L duC t
R
LC
RC
1 uC t ut
dt
Ro dt
Ro
Oczywiście, dla t>0
u Ro t uC t
Potrzebne warunki początkowe
uC 0
Kazimierz Duzinkiewicz, dr hab. inż.
?
duC 0
?
dt
Katedra Inżynierii Systemów Sterowania
71
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Ponieważ napięcie na kondensatorze nie może się „nagle” zmienić
uC 0 uC 0
Z stanu ustalonego przed załączeniem wynika
uC 0 E uC 0 E
Dla znalezienia drugiego warunku początkowego
duC 0 1
iC 0
dt
C
Z równania dla węzła
it iC t iRo t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
72
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Prąd w cewce nie może zmienić się skokowo, więc
i0 i0 0
Stąd
iC 0
i 0
Ro
E
iRo 0
Ro
Zatem
duC 0 1
1
iC 0
E
dt
C
RoC
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
73
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Systemy hydrauliczne – przykładowe modele
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
74
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-7
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
75
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
76
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-8
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
77
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
78
Modelowanie i podstawy identyfikacji 2015/2016
Modele fenomenologiczne - linearyzacja
Przykład D-9
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
79
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
80
Modelowanie i podstawy identyfikacji 2015/2016
Kazimierz Duzinkiewicz, dr hab. inż.
Modele fenomenologiczne - linearyzacja
Katedra Inżynierii Systemów Sterowania
81