Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Układ napędowy z silnikiem indukcyjnym i falownikiem
napięcia – metoda sterowania polowo zorientowanego
(FOC)
Instrukcja do ćwiczenia laboratoryjnego
Jarosław Guziński, Marcin Morawiec, Sebastian Giziewski
Katedra Automatyki Napędu Elektrycznego WEiA
Politechnika Gdańska 2013
wersja MM_2.7
1. Cel ćwiczenia
Celem ćwiczenia jest poznanie właściwości statycznych i dynamicznych układu
napędowego z silnikiem indukcyjnym klatkowym z polowo zorientowanym układem
sterowania FOC (ang. Field Oriented Control).
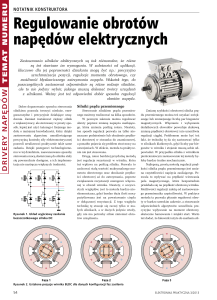
2. Wprowadzenie
Sterowanie układami napędowymi z silnikami prądu przemiennego jest bardzo złożone
w porównaniu ze sterowaniem układami napędowymi prądu stałego.
W napędach prądu stałego najłatwiej sterować jest silnikiem obcowzbudnym. W silniku
obcowzbudnym wielkościami regulowanymi są:
strumień magnetyczny w – który regulowany jest przez zmianę prądu
wzbudzenia silnika iw np. za pomocą sterowanego źródła napięcia uw
zasilającego obwód wzbudzenia,
moment elektromagnetyczny me – który regulowany jest przez zmianę prądu
twornika it przy stałym strumieniu wzbudzenia w=const.; regulacja prądu
twornika uzyskiwana jest np. za pomocą sterowanego źródła napięcia ut
zasilającego obwód twornika.
Moment elektromagnetyczny silnika prądu stałego opisany jest zależnością:
m e k w i t
(1)
gdzie k jest stałą maszyny.
W odróżnieniu od sterowania silnikiem obcowzbudnym prądu stałego sterowanie
silnikiem indukcyjnym jest znacznie bardziej skomplikowane. Jednak stosując falownik
napięcia, który odpowiednio jest sterowany przez system mikroprocesorowy, można
uzyskać dla silnika indukcyjnego właściwości regulacyjne takie same lub lepsze niż w
przypadku silnika obcowzbudnego prądu stałego. Lepsza właściwości napędu z silnikiem
indukcyjnym wynikają z tego, że silnik indukcyjny jest pozbawiony szczotek i w związku z
tym nie wymaga zmiany położenia szczotek w zależności od kierunku obrotów i obciążenia
maszyny co jest często wymagane w przypadku napędów z maszynami prądu stałego.
Metodą sterowania, która pozwala na uzyskanie bardzo dobrych właściwości napędu z
silnikiem indukcyjnym jest metoda sterowania polowo zorientowanego.
3. Sterowanie polowo zorientowane
Nazwa sterownie polowo zorientowane nazywane potocznie sterowaniem wektorowym
oznacza, że model matematyczny maszyny sprowadza, się do układu współrzędnych
wirującego współbieżnie z przyjętym wektorem strumienia skojarzonego wirnika lub stojana.
W instrukcji przedstawiono najczęściej spotykaną metodę sterowani polowego, z układem
zorientowanym względem wektora strumienia skojarzonego wirnika.
1
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Rys. 1. Składowe prądu stojana w układach współrzędnych nieruchomych oraz
współrzędnych wirujących dq
Wprowadzenie układu współrzędnych dq wirującego synchronicznie z wektorem
strumienia skojarzonego wirnika wymaga wyznaczenia składowych wektorów wielkości
regulowanych dla współrzędnych układu dq. W tym celu niezbędna jest znajomość kąta ρ
określającego położenie wektora strumienia wirnika względem nieruchomego układu
odniesienia . Kąt obliczany jest przez układ mikroprocesorowy przy wykorzystaniu
matematycznych zależności obserwatora stanu silnika klatkowego. W obserwatorze obliczane
są aktualne wartości składowych strumienia skojarzonego wirnika, na podstawie których
określony jest kąt :
arctg r
(2)
r
W układzie współrzędnych nieruchomych składowe poszczególnych wektorów są w
stanie ustalonym wielkościami sinusoidalnie zmiennymi. Natomiast składowe tych wektorów
w układzie współrzędnych dq mają w stanie ustalonym stałe wartości.
Zasada sterowania polowo zorientowanego oparta jest na analizie równań modelu
maszyny asynchronicznej klatkowej. Ogólna postać równań modelu maszyny asynchronicznej
klatkowej zapisana przy przyjęciu jednostek względnych dla układu współrzędnych xy
wirujących z dowolną prędkością a jest następująca:
di sx
a 1 i sx a 2 rx a i sy r a 3 ry a 4 u sx
(3)
dt
di sy
a 1 i sy a 2 ry a i sx r a 3 rx a 4 u sy
(4)
dt
d rx
a 5 rx a r ry a 6 i sx
(5)
dt
d ry
a 5 ry a r rx a 6 i sy
(6)
dt
dr L m
rx i sy ry i sx 1 m o
(7)
dt
Lr J
J
gdzie:
R L2 R r L2m
R L
L
L
R
L
a1 s r
, a2 r m , a3 m , a4 r , a5 r , a6 R r m ,
Lr w
Lr w
w
w
Lr
Lr
2
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
L2m
,
Ls L r
oraz is oraz us to prąd i napięcie stojana, J jest momentem bezwładności, mo to momentem
obciążenia, Rs i Rr są rezystancjami uzwojeń stojana i wirnika, Ls, Lr są indukcyjnościami
uzwojeń stojana i wirnika, Lm jest indukcyjnością główną natomiast jest współczynnikiem
rozproszenia.
Równania modelu silnika indukcyjnego (3)-(7) zapisane zostały przy przyjęciu jednostek
względnych odniesionych do wielkości bazowych przedstawionych w tab. 2 znajdującej się w
końcowej części instrukcji.
Zależności modelu silnika (3)-(7) można zapisać dla układu współrzędnych wirujących
dq przyjmując, że a=r. Otrzymuje się wtedy równania modelu silnika dla układu
współrzędnych dq w postaci:
di sd
a 1 i sd a 2 rd r i sd a 4 u sd
(8)
dt
di sq
a 1 i sq r i sd r a 3 rd a 4 u sq
(9)
dt
d rd
a 5 rd a 6 i sd
(10)
dt
dr L m
1
rd i sq m o
(11)
dt
Lr J
J
Ponieważ w układzie współrzędnych dq składowa strumienia dla osi q jest równa zero to
wartość składowej strumienia dla osi d jest równa modułowi strumienia wirnika:
r 2r 2r rd
(12)
w L r L s L r L s L2m , 1
Moment elektromagnetyczny wytwarzany przez silnik asynchroniczny klatkowy
określony jest zależnością:
L
m e m rd i sq k IM r i sq
(13)
Lr
gdzie k IM L m L r
Wzór na moment silnika indukcyjnego (13) jest podobny do wzoru na moment silnika
obcowzbudnego (1). Wynika z tego, że stosując metodę sterowania, w której reguluje się
wielkości wektorowe w układzie wirującym dq, można sterować silnikiem indukcyjnym
podobnie jak steruje się silnikiem obcowzbudnym prądu stałego.
Przy założeniu, że strumień silnika jest stały, z równania (13) wynika, że moment
elektromagnetyczny generowany przez silnik indukcyjny jest proporcjonalny do prądu w
osi q:
m e ~ isq
(14)
dla const .
r
Natomiast z zależności (10) wynika, że strumień w silniku indukcyjnym jest proporcjonalny
do prądu stojana w osi d:
r ~ i sd
(15)
Porównując sterowanie silnikiem obcowzbudnym prądu stałego i silnikiem indukcyjnym
prądu przemiennego można stwierdzić że:
prąd isq w silniku indukcyjnym pełni rolę analogiczną do prądu twornika it silnika
obcowzbudnego prądu stałego,
prąd isd w silniku indukcyjnym pełni rolę analogiczną do prądu wzbudzenia iw
silnika obcowzbudnego prądu stałego.
3
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Struktura układu sterowania
przedstawiona została na rys. 2.
r
zad
^r
|r|zad
isq
zad
polowo
usqzad
zorientowanego
silnikiem
indukcyjnym
Ud
TP-1
_
+
uszad
isq
isdzad
zad
usd
zad
us
A B C
-
^ r|
|
+
isd
^
^r
is
TC
A-B-C
is
^ r|
|
isA
isB
-
^
isq
SILNIK
-
isd
TP
Rys. 2. Schemat blokowy układu sterownia silnikiem indukcyjnym
z orientacją względem wektora pola wirnika
W układzie sterowania z rys. 2 silnik indukcyjny zasilany jest z trójfazowego
tranzystorowego falownika napięcia. Bloki oznaczone PI są regulatorami proporcjonalnocałkującymi. Blok PWM oznacza układ sterowania tranzystorów falownika realizujący
modulację szerokości impulsów (ang. Pulse Width Modulation).
Blok obserwatora służy do obliczeń:
kąta położenia wektora strumienia skojarzonego wirnika ,
modułu strumienia wirnika |r|,
prędkości kątowej silnika r
Wielkości obliczane w obserwatorze oznaczone są symbolem ^.
W układzie z rys. 2 mierzone jest napięcie zasilania falownika Ud oraz dwa prądy fazowe
silnika isA oraz isB. Prądy fazowe silnika przeliczane są w układzie sterowania z układu
współrzędny trójfazowych ABC do układu współrzędnych dwufazowych, nieruchomych .
Takie przekształcenie wykonywane jest w bloku TC realizującego transformację Clarka
zachowującą inwariantność mocy układu:
2
1
1
is
(16)
isA i sB isC
2
2
3
1
is
isB isC
(17)
2
4
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Następnie prądy is oraz is przeliczane są na prądy w wirującym układzie osi dq.
Przeliczenie to przeprowadzane jest w bloku oznaczonym jako TP realizującego
transformację Parka:
isd is cos is sin
(18)
isq is sin i s cos
(19)
W układzie sterowania polowo zorientowanego z rys. 2 nadrzędnymi wielkościami
regulowanymi są prędkość r i strumień silnika indukcyjnego |r|. Układ nadrzędnych
regulatorów na podstawie wartości zadanych prędkości rzad oraz strumienia |r|zad określa
zadane składowe prądu stojana isqzad oraz isdzad. Prądy zadane porównywane są z prądami
rzeczywistymi silnika isq oraz isd a na tej podstawie wyznaczane są zadane składowe napięcia
silnika usqzad oraz usdzad. Zadane składowe napięcia silnika przeliczane są następnie z układu
współrzędnych dq do układu współrzędnych w bloku odwrotnej transformacji Parka,
oznaczonego jako TP-1, w którym wykonywane są następujące obliczenia:
zad
zad
u szad
(20)
u sd cos u sq sin
u szad
u sd sin u sq cos
(21)
Zadane napięcia silnika uszad oraz uszad wprowadzane są do bloku PWM, który
odpowiednio sterując tranzystorami umożliwia uzyskanie na wyjściu falownika napięcia
silnika zgodnego z napięciem zadanym przez układ regulacji.
Napięcia zadane uszad oraz uszad wykorzystywane są łącznie z mierzonymi prądami is
oraz is przez blok obserwatora do odtwarzania zmiennych.
W układzie napędowym przedstawionym na rys. 2 nie występuje czujnik prędkości, gdyż
prędkość kątowa obliczana jest przez obserwator. Takie układy, w których prędkość jest
regulowana, a w których zamiast pomiaru prędkości silnika stosuje się obliczanie prędkości
nazywane są układami sterowania bezczujnikowego.
4. Dobór nastaw regulatorów
Zlinearyzowany układ dzieli się na dwa podukłady, elektromechaniczny związany ze
zmiennymi ωr i isq, oraz elektromagnetyczny związany ze zmiennymi fr_obs i isd. Na
podstawie struktury podukładów zaprojektowano kaskadowy układ regulatorów typu PI.
W złożonym układzie sterowania silnikiem indukcyjnym nastawy regulatorów można
wyznaczać na drodze eksperymentalnej podobnie jak dla obcowzbudnej maszyny prądu
stałego. W praktyce dobór regulatorów może być przeprowadzany na podstawie prób i
obserwacji otrzymanych przebiegów. Dąży się przy tym do tego, aby układ napędowy z
dobranymi nastawami regulatorów pracował zgodnie z założeniami.
W układzie napędowym badanym w ćwiczeniu regulatory wielkości sterujących tworzą
dwie struktury kaskadowe, tj. podukład mechaniczny i elektromagnetyczny. W układzie tym
na wstępie należy dokonać optymalizacji obwodów wewnętrznych, a więc obwodów regulacji
zmiennych isq i isd, a następnie optymalizacji obwodów zewnętrznych, czyli obwodu regulacji
prędkości – zmiennej ωr i strumienia – zmiennej fr_obs.
W badanym układzie sterowania zastosowano regulatory proporcjonalno – całkujące z
których każdy określony jest zależnością:
in
U wy n 1 K p E n K i E i ,
(21)
i 0
gdzie U wy n 1 jest wielkością wyjściową regulatora w chwili n 1 , E n jest uchybem
in
wielkości regulowanej w chwili n ,
E i
jest sumą uchybów wielkości regulowanej od
i 0
5
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
chwili i 0 do chwili i n , K p jest wzmocnieniem części proporcjonalnej regulatora PI,
K i jest wzmocnieniem części całkującej regulatora PI.
W układzie rzeczywistym nastawy regulatorów dobrane w sposób analityczny mogą nie
być optymalne ze względu na niedokładności wyznaczonych parametrów układu. Optymalne
wartości nastaw regulatorów muszą być określone przez dostrojenie na obiekcie. Dostrojenie
w układzie rzeczywistym przeprowadza się najczęściej przez rejestrację przebiegów
zmiennych regulowanych i porównanie ich z zadanymi przebiegami - rys. 4.
zad
tr
% 4%
zad
t1
t
Rys. 3. Przebieg odpowiedzi czasowej układu sterowania na skokowe zmiany wielkości sterującej zad
Nastawy zmienia się tak, aby uzyskać jak najszybsze działanie układu przy
równoczesnym ograniczeniu lub wyeliminowaniu przeregulowań i uzyskaniu stabilnej pracy
układu.
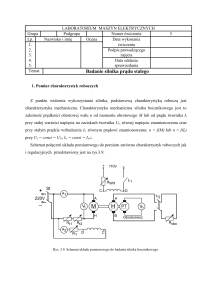
5. Stanowisko laboratoryjne
Stanowisko laboratoryjne składa się z silnika indukcyjnego FSg132S2 o mocy 5,5kW
zasilanego z przemiennika częstotliwości MMB-12 oraz obciążenia w postaci maszyny prądu
stałego PZOb-54A zasilanej z przekształtnika tyrystorowego DMLII-0040. Schemat połączeń
maszyn i przekształtników stanowiska laboratoryjnego pokazano na rys. 4.
6
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Rys. 4. Schemat połączeń maszyn i przekształtników stanowiska laboratoryjnego
Sterowanie układu napędowego z silnikiem indukcyjnym składa się składa się ze
sterownika mikroprocesorowego i komputera PC. Do sterowania układu z pradnicą użyto taki
sam sterownik współpracujący z lokalnym panelem kontrolnym. Schemat połączeń
komunikacyjnych pokazano na rys. 5.
PC
RS-232
SHARC SH65L
ADSP-21065L
i
Układ FPGA
SHARC SH65L
ADSP-21065L
i
Układ FPGA
T1..T6
Przemiennik
częstotliwości
MMB 12
Przekształtnik
tyrystorowy
DML
SILNIK
INDUKCYJNY
PRĄDNICA –
OBCIĄŻENIE
Panel kontrolny
Rys. 5. Sterowanie układu laboratoryjnego
Sterownik mikroprocesorowy składa się z procesora sygnałowego ADSP21065L, układu
logiki programowalnej FPGA, przetwornika analogowo - cyfrowego oraz układów wejść
i wyjść cyfrowych. Komputer PC umożliwia ładowanie programu sterowania do pamięci
sterownika mikroprocesorowego za pomocą interfejsu RS232 oraz obsługę układu
napędowego przy pomocy programu TKombajn - zadawanie i odczyt parametrów oraz
wizualizację przebiegów. Obsługę programu Tkombajn opisano w załączniku 3.
7
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Obciążeniem silnika indukcyjnego zasilanego z przekształtnika MMB-12 jest maszyna
prądu stałego o mocy 6,5kW zasilana z przekształtnika tyrystorowego nawrotnego DMLII0040 pracującą jako generator na ograniczeniu momentu. Dane znamionowe silnika
indukcyjnego i maszyny prądu stałego zostały zamieszczone w załączniku nr 1. Schemat
połaczeń układu, opis rozdzielnic i obsługi przekształtnika tyrystorowego zamieszczono w
załączniku nr 2.
Tab. 1. Spis zmiennych dostępnych w programie konsoli opeartora „TKombajn”
Zmienna
Opis
omegaRzad
Zadana prędkość silnika (zakres –0,6 ... +0,6)
omegaR_obs
Prędkość silnika obliczona w obserwatorze prędkości
frzad
Strumień magnetyczny wirnika – zadany (zakres 0,4 ... 1,2)
fr_obs
Moduł strumienia magnetycznego wirnika – obliczony
frx_so, fry_so
Składowe strumienia magnetycznego wirnika
me
ia, ib, ic
Moment elektromagnetyczny silnika
Moment elektromagnetyczny silnika uśredniony
(tylko do odczytu w zakładce [Variables] programu Tkombajn)
Mierzone prądy fazowe silnika - współrzędne naturalne abc
isx, isy
Mierzone prądy silnika - współrzędne
isq, isd
Mierzone prądy silnika - współrzędne dq
isqzad, isdzad
Zadane prądy silnika - współrzędne dq
usqzad, usdzad
Zadane napięcia silnika - współrzędne dq
USXa, USYa
Zadane napięcia silnika - współrzędne
is
Moduł mierzonego prądu stojana
Napięcie stałe w obwodzie pośredniczącym przemiennika
częstotliwości
Czas rozruchu [s], domyślnie 0,5s, (zakres 0,2 ... 20)
Wzmocnienie członu proporcjonalnego regulatora
prędkości(domyślnie 18)
Wzmocnienie członu całkującego regulatora prędkości
(domyślnie 0,001)
Wzmocnienie członu proporcjonalnego regulatora składowej q
prądu stojana (domyślnie 0.2)
Wzmocnienie członu całkującego regulatora składowej prądu
stojana (domyślnie 0,001)
Wzmocnienie członu proporcjonalnego regulatora strumienia
wirnika (domyślnie 10)
Wzmocnienie członu całkującego regulatora strumienia wirnika
(domyślnie 0,0005)
Wzmocnienie członu proporcjonalnego regulatora składowej d
prądu stojana, (domyślnie 0,2)
mef
ud
tr
kpomegaR
kiomegaR
kpisq
kiisq
kpfr
kifr
kpisd
8
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
kiisd
isqo
isdo
usqo
usdo
Wzmocnienie członu całkującego regulatora składowej d prądu
stojana, domyślnie (0,0002)
Ograniczenie wyjścia regulatora prędkości, (domyślnie 0,9 /
zakres 0,2 ... 0,9)
Ograniczenie wyjścia regulatora prędkości, (domyślnie 0,9 /
zakres 0,2 ... 0,9)
Ograniczenie wyjścia regulatora prędkości, (domyślnie 0,9 /
zakres 0,2 ... 0,9)
Ograniczenie wyjścia regulatora prędkości, (domyślnie 0,9 /
zakres 0,2 ... 0,9)
Uwaga: Wszystkie rejestrowane zmienne określone są w jednostkach względnych
odniesionych do wielkości bazowych zdefiniowanych w tab. 3 [3]:
Tab. 2. Jednostki bazowe
Napięcie bazowe
Ub
Prąd bazowy
Ib
Impedancja bazowa
Zb
Strumień magnetyczny bazowy
b
Prędkość kątowa bazowa
b
Moment bazowy
mb
Indukcyjność bazowa
Lb
gdzie o to pulsacja synchroniczna o=2πfn
3 Un fazowe
3 In fazowy
Ub/Ib
Ub/o
o/p
bIbp
b/Ib
6. Program ćwiczenia
1. Zapoznać się z działaniem i obsługa stanowiska.
2. Załadować do pamięci procesora plik „foc.ldr”.
3. Wyznaczyć charakterystyki mechaniczne układu n=f(Me) tj. zależność między prędkością
obrotową n[obr/min] oraz momentem elektromagnetycznym silnik Me[Nm]. Wyznaczyć
charakterystyki dla 3 różnych zadanych prędkości: np.: 0,5j.w., 0,3j.w i 0,1j.w.
Charakterystyki wyznacza się tak, że dla zadanej wartości prędkości zmienia się
obciążenie silnika odczytując wielkości n oraz Me. Prędkość obrotową i moment
obciążenia silnika odczytywać w programie konsoli operatora. Zmierzone charakterystyki
przedstawić na wspólnym wykresie. Prędkość obrotowa silnika i moment wyrazić w
jednostkach rzeczywistych czyli [obr/min] i [Nm]. W sprawozdaniu określić sztywność
charakterystyk.
4. Przeprowadzić rejestrację stanu ustalonego pracy silnika przy prędkości zadanej 0,1[j.w.]
oraz 0,5[j.w.] dla zmiennych:
omeraRzad, omegaR_obs , fr_obs, me, ud,
omeraRzad, omegaR_obs, isd, isq, ia,
5. Powtórzyć pomiary z punktu 4 dla zadanej prędkości 0,5j.w. oraz osłabionego strumienia
o wartości 0,6.j.w. Po zakończeniu pomiarów ustawić zadaną wartość strumienia na
1,0j.w.
6. Zmieniając zadaną wartość strumienia wyznaczyć zależność pomiędzy modułem
strumienia wirnika a modułem prądu stojana |is|=f(| r|) – zmiennymi programu: is, fr_obs.
9
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Pomiary przeprowadzić dla silnika nieobciążonego dla zdanych prędkości np. 0,6j.w. oraz
0,4j.w. W sprawozdaniu, na wspólnym wykresie narysować zmierzone charakterystyki.
7. Dobrać nastawy regulatora PI prędkości: kpomegaR oraz kiomegaR. Dobór
przeprowadzić na podstawie odpowiedzi układu na skok jednostkowy zadanej prędkości
od 0,1j.w. do 0,6j.w porównując prędkość zadaną silnika z prędkością silnika obliczoną w
obserwatorze lub prędkością mierzoną. Rejestrować: prędkość zadaną, obliczoną, moment
elektromagnetyczny, zadaną składową q prądu silnika oraz moduł strumienia wirnika.
8. W stanie ustalonym zarejestrować: me, isqzad, isq, usqzad, is. Badanie przeprowadzić
przy zadanej prędkości 0,5j.w. dla 3 dowolnych obciążeń. Zaobserwować jak zmieniają
się rejestrowane wielkości w zależności od obciążenia. Pomiary wykonać dla krótkiego
czasu rejestracji.
9. W stanie ustalonym zarejestrować składowe zmiennych w układzie współrzędnych : :
USXa, USYa, isx, isy, frx_so. Badanie przeprowadzić przy prędkości zadanej 0,5 j.w. dla
silnika bez obciążenia oraz przy 3 dowolnych poziomach obciążenia.
10. Dla takiego samego obciążenia i takiej samej prędkości jak w punkcie 9 w stanie
ustalonym zarejestrować: usqzad, isq, isqzad, usdzad, isd.
11. Przeprowadzić rejestrację przebiegów przy znamionowym strumieniu frzad=1,0 j.w. dla:
wzrostu prędkości od 0.1 j.w. do 0.6 j.w. z obciążeniem i bez obciążenia.
zmniejszenia prędkości od 0.6 j.w. do 0.1 j.w. z obciążeniem i bez obciążenia.
Rejestrować: prędkość zadaną, prędkość obliczaną, moment elektromagnetyczny
filtrowany, zadaną składową q prądu silnika oraz moduł strumienia wirnika.
12. Przeprowadzić rejestrację przebiegów przy osłabieniu strumienia zadanego frzad=0,8 dla:
wzrostu prędkości od 0.1 j.w. do 0.6 j.w., z obciążeniem i bez obciążenia.
zmniejszenia prędkości od 0.6 j.w. do 0.1 j.w. z obciążeniem i bez obciążenia.
Rejestrować: prędkość zadaną, prędkość aktualną, moment elektromagnetyczny silnika,
zadaną składową q prądu silnika oraz moduł strumienia wirnika.
13. Przeprowadzić rejestrację przy stałej prędkości obrotowej silnika 0.6j.w. i zmniejszeniu
strumienia silnika od 1.0 j.w. do 0.6 j.w. Pomiary wykonać dla silnika obciążonego i
nieobciążonego.
Rejestrować: zadany strumień wirnika, aktualny moduł strumienia wirnika, zadaną
składową d prądu stojana, prędkość aktualną oraz moment elektromagnetyczny silnika.
14. Przeprowadzić rejestrację przy stałej prędkości obrotowej silnika 0.6j.w. i zwiększeniu
strumienia silnika od 0.6 j.w. do 1.0 j.w. Pomiary wykonać dla silnika obciążonego i
nieobciążonego.
Rejestrować: zadany strumień wirnika, aktualny moduł strumienia wirnika, zadaną
składową d prądu stojana, prędkość aktualną oraz moment elektromagnetyczny silnika.
15. Sprawdzić działanie ograniczenia prądu w osi q. Badanie przeprowadzić wykonując próbę
zwiększenia prędkości obrotowej silnika od 0.1 j.w. do 0.6 j.w. dla dwóch ograniczeń
prądu np: 0,4 j.w. i 0,7 j.w. Pomiar wykonać dla silnika nieobciążonego i obciążonego.
Rejestrować: prędkość zadaną, prędkość obliczaną, moment elektromagnetyczny
filtrowany, zadaną składową q prądu silnika oraz moduł strumienia wirnika.
16. Przeprowadzić rejestrację nawrotu silnika od 0.6 j.w. do -0.6 j.w. bez obciążenia przy
znamionowym strumieniu 1,0j.w. oraz strumieniu osłabionym na 0,8 j.w.
Rejestrować: prędkość zadaną, prędkość obliczaną, moment elektromagnetyczny
filtrowany, zadaną składową q prądu silnika oraz moduł strumienia wirnika.
10
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
17. Zbadać działanie układu przy zmianie obciążenia silnika: bieg jałowy obciążenie
bieg jałowy. Badanie wykonać dla zadanej prędkości 0,5 j.w.
Rejestrować: prędkość obliczaną, moment elektromagnetyczny, zadaną składową q prądu
silnika, moduł prądu stojana oraz moduł strumienia wirnika.
Rejestracje załączyć przy silniku pracującym na biegu jałowym a następnie załączyć i po
chwili wyłączyć obciążenie. Rejestrację przeprowadzić dla odpowiednio długiego czasu.
1.
2.
3.
4.
7. Literatura
Zawirski K., Deskur J., Kaczmarek T.: Automatyka napędu elektrycznego,
Wydawnictwo Politechniki Poznańskiej, Poznań 2012.
Koczara W.: Wprowadzenie do napędu elektrycznego, Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa 2012.
Tunia H., Kaźmierkowski M.: Automatyka napędu przekształtnikowego. PWN,
Warszawa, 1987.
Orłowska - Kowalska T.: Bezczujnikowe układy napędowe z silnikami indukcyjnymi,
Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław 2003.
8. Zagadnienia
1.
2.
3.
4.
5.
6.
7.
Zasada sterowania wektorowego FOC silnikiem klatkowym.
Budowa przemiennika częstotliwości do regulacji prędkości silnika indukcyjnego
klatkowego.
W jakim celu wykorzystywany jest układ obserwatora w układzie sterowania polowo
zorientowanego?
Wyjaśnić, do jakich celów wykorzystywany jest kąt ρ w układzie sterowania
wektorowego.
Omówić wpływ ograniczenia prądu w osi q na pracę napędu w stanach przejściowych.
Wyjaśnić, na czym polega analogia między napędem z silnikiem obcowzbudnym prądu
stałego i napędem z silnikiem indukcyjnym sterowanym wektorowo.
Porównać właściwości napędu z silnikiem indukcyjnym sterowanym skalarnie i
wektorowo w stanie ustalonym oraz stanach dynamicznych.
Załącznik 1
Dane maszyn elektrycznych
Tab. 3. Dane silnika indukcyjnego FSg 132S-2A 5,5kW
Typ maszyny
FSg 132 S-2A
Moc znamionowa
Napięcie fazowe
Prąd fazowy silnika przy połączeniu
uzwojeń w gwiazdę
Prędkość obrotowa znamionowa
Pn=5,5 [kW]
Unf=230 [V]
In=10.4 [A]
Częstotliwość znamionowa
Liczba par biegunów
Znamionowy współczynnik mocy
Sprawność
nn=2910
[obr/min]
fn=50 [Hz]
p=1
cos n=0.88
87%
11
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Tab. 4. Dane maszyny prądu stałego PZOb – 54a 6,5kW
Typ maszyny
PZOb – 54a
Moc znamionowa
Napięcie znamionowe
Prąd znamionowy
Prędkość obrotowa znamionowa
Pn=6.5 [kW]
Unf=460 [V]
In=14,2 [A]
nn=2850
[obr/min]
Unf=220 [V]
In=1,34 [A]
Napięcie znamionowe wzbudzenia
Prąd znamionowy wzbudzenia
Załącznik 2
Instrukcja obsługi
sterowanego DML
oraz
dokumentacja
techniczna
tyrystorowego
prostownika
Przeznaczenie i zasada działania
W stanowisku laboratoryjnym do zasilania silnika prądu stałego M3 o mocy 6,5kW zastosowano
tyrystorowy prostownik sterowany typu DML-0040. Układ przeznaczony jest do modelowania obciążenia i
może pracować generatorowo z oddawaniem energii z układu napędowego z silnikiem indukcyjnym do sieci
elektroenergetycznej. Układ tyrystorowy wyposażony jest cyfrowy układ sterowania służący do stabilizacji
prędkości i prądu twornika generatora na określonym poprzez potencjometry R3 (zadajnik prędkości) i R4
(ogranicznik prądu) poziomie. Regulacja prędkości i prądu odbywa się w pętli z pomiarem prędkości za pomocą
enkodera i pomiarem prądu twornika za pomocą czujnika hallotronowego. Dzięki zastosowaniu systemu
mikroprocesorowego regulacja prądu twornika generatora odbywa się w kaskadowym układzie regulacji z
cyfrowymi regulatorami proporcjonalno-całkującymi. Regulatorem podrzędnym jest regulator prądu twornika,
zaś regulatorem nadrzędnym regulator prędkości kątowej wału.
Na rys. 6 i rys. 7 przedstawiono kolejno schemat układu laboratoryjnego oraz widok rozdzielnic.
3 x 230/400V ~ 50Hz TN-C-S
3 x 230/400V ~ 50Hz TN-C-S
LgY1,5
LgY5x4
L3
WTO5x32 PE
L2
L1
LgY5x4
K2
K1
Q1
S301
B6
N
F1-F3
DO2
35A
gR
Q2
S301
B6
F4-F6
DO2
20A
gG
H1
LgY1,5
Sterowanie
Rys. 2.
L3
PE
L2
L1
N
Sterowanie
Rys. 2.
Q3
ZMS
0,4/3
L1
L2
L3
1 2
PE
Z_p
anel
U1
DML-0040 MN505
Z9
Zasilanie 3x400V 50Hz
U
A+ A-
P2
LEM
LA205S
3
N
L3
PE
U2
MMB-12
V
W
X1
(5)
X1
(6)
X1
(7)
PE
Zasilanie 3x400V 50Hz
PE
M2
Wentylator
silnika
4
M
Komputer
PC
M
R1
Rezystor BW103
60R, 800W
M
P1
L2
BR
DC+
rys.
3
Z6
Z7
Panel
kontrolny
L1
List
wa
zdal
neg
o
ster
owa
nia
RS232
M1
FSg 132S-2A
5,5kW 3x400V 10,4A
2910obr/min
Uwaga:
1. Główny tor prądowy wykonać przewodem LgY4, pozostałe obwody LgY1,5
2. Podłaczenie enkodera P3, pomiaru prędkości przedstawiono na rys. 2.
3. Połączenia silnolnoprądowe rezystora hamowania R1 łaczyć przewodem LgY3x1,5
M3
PZOb 54a
6,5kW 460V 14,2A 2850obr/min
Politechnika Gdańska
Rys.1
Stanowisko do badań układów multiskalarnego sterowania - część silnoprądowa
14.03.2006
M. Włas
Rys. 6. Schemat układu laboratoryjnego
12
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Rozdzielnica
DML-0040
Rozdzielnica
MMB-12
Zasilanie
Panel
kontrolny
Kasowanie
Wyłacznik
awaryjny
H1
S4
S5
Start/Stop
Zał.
Wył.
S1
S2
Zadajnik Ogranicznik
prędkości momentu
Zał.
Wył.
S6
S7
S3
R3
R4
Rys. 7. Widok rozdzielnic z aparaturą łączeniową
(lewa rozdzielnica jest dla prostownika, natomiast prawa dla falownika)
Prostownik załączany jest lokalnie z przełącznika S3 umieszczonego na drzwiach rozdzielnicy DML-0040.
Wzbudzenie generatora jest stałe i podane z zacisków dodatkowego niesterowanego jednofazowego prostownika
diodowego będącego częścią układu DML-0040.
Opis aparatów na drzwiach rozdzielnic DML-0040 i MMB-12
Zgodnie z rys. 6 na drzwiach rozdzielnicy prostownika DML-0040 umieszczono:
kontrolka H1 – informujące o stanie zasilania rozdzielnicy RA,
przycisk S4 służący do kasowania awarii występujących podczas pracy,
panel kontrolny – do wyświetlania kodu awarii oraz wartości prędkości, prądu, napięcia, zadanej
prędkości i ograniczenia momentu silnika M3,
przełącznik S3 STOP/START – do załączania prostownika sterowanego DML-0040,
przyciski S1 Zał. i S2 Wył. służące do załączania i wyłączania stycznika K1 zasilającego prostownik
sterowany,
potencjometr wieloobrotowy R3 – zadajnik prędkości,
potencjometr wieloobrotowy R4 – ogranicznik momentu (prądu twornika).
Na drzwiach rozdzielnicy falownika MMB-12 umieszczono
przycisk S5 – awaryjnego wyłączania,
przyciski S6 Zał. i S7 Wył. służące do załączania i wyłączania stycznika K2 zasilającego przemiennik
MMB-12.
Sterowanie i ustawianie parametrów prostownika DML
1. Przycisk S1 Zał. załącza stycznik K1 natomiast przycisk S2 Wył. wyłącza. Podanie napięcia na prostownik
tyrystorowy powoduje zapalnie się kontrolki H1 oraz załączenie wzbudzenia maszyny prądu stałego.
2. Uruchomienie prostownika tyrystorowego odbywa się przy pomocy przełącznika S3 STOP/START
który umieszczony jest na drzwiach rozdzielnicy DML-0040. Po uruchomieniu układ regulacji zaczyna
generować takie napięcie aby wymusić prędkość zadaną za pomocą potencjometru R3. Jeśli układ
napędowy z silnikiem indukcyjnym wymusza inną wyższą niż zadana potencjometrem R3 prędkość wału to
układ tyrystorowy przechodzi do pracy generatorowej z regulacją prądu twornika i oddawaniem energii do
sieci. Na panelu kontrolnym (rys. 8) świeci się kontrolka REV oznaczająca poprawną pracę generatorową
układu tyrystorowego.
UWAGA: W przypadku jeśli zadana w układzie z silnikiem indukcyjnym prędkość wału jest niższa
niż prędkość zadana w prostowniku tyrystorowym układ maszyny prądu stałego przechodzi do pracy
silnikowej. Na panelu kontrolnym świeci się kontrolka FWD oznaczająca niepoprawną pracę
silnikową układu tyrystorowego. Ze względu na niewielką moc rezystora hamowania (75W) w
przemienniku częstotliwości MMB-12, układ tyrystorowy zostanie wyłączony po przesłaniu energii
1000Ws. Po wyłączeniu zgłoszona zostanie na panelu awaria o kodzie nr 15.
13
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Rys. 8. Lokalny panel kontrolny prostownika tyrystorowego
3. Zadawanie prędkości jest możliwe przy pomocy potencjometru R3. Po pomyślnym uruchomieniu układ
regulacji rozdzielnicy dąży do tego aby utrzymać zadaną prędkość a jeśli to nie jest możliwe działa na
ograniczeniu prądu twornika (momentu) określonego przez wartość napięcia z potencjometru R4. Obie
wartości zadanej prędkości i ograniczenia momentu wyświetlane są na panelu kontrolnym po trzykrotnym
(prędkość) i czterokrotnym (moment) naciśnięciu przycisku MODE.
4. Wyłączenie rozdzielnicy odbywa się przy pomocy przełącznika S3 STOP/START który umieszczony
jest na drzwiach rozdzielnicy. Naciśnięcie tego przycisku powoduje sprowadzenie prądu twornika do
wartości równej 0 [A], po czym silnik hamuje wybiegiem.
Lokalny panel kontrolny prostownika DML
Lokalny panel kontrolny z wyświetlaczem LED służy do sygnalizacji stanu prostownika tyrystorowego
oraz do podglądu aktualnych wartości prędkości, prądu, napięcia i wartości zadanych prędkości i ograniczenia
momentu. Zmiana widocznych na wyświetlaczu parametrów odbywa się przy pomocy przycisku MODE.
Możliwe jest wyświetlenie:
aktualnej prędkości obrotowej silnika, podanej w obrotach na minutę (sygnał z tachoprądnicy),
aktualnej wartości prądu twornika silnika podanej w amperach, jednorazowe naciśnięcie MODE,
aktualnej wartości napięcia twornika silnika podanej w woltach, dwukrotne naciśnięcie MODE.
zadanej wartości prędkości wału podanej w jednostkach względnych w odniesieniu do znamionowej
prędkości wirnika maszyny prądu stałego (2850 obr/min), trzykrotne naciśnięcie MODE,
wartości ograniczenia prądu twornika w regulatorze prądu w jednostkach względnych odniesionych do
prądu znamionowego maszyny prądu stałego (14,2A) , czterokrotne naciśnięcie MODE.
Przykładowe informacje wyświetlane w różnych stanach pracy rozdzielnicy przedstawiono w tab. 5.
Tab. 5. Informacje wyświetlane na panelu układu DML w różnych stanach pracy
Wyświetlana informacja
Wyjaśnienia
Rozdzielnica wyłączona i gotowa do pracy. Naciśnięcie przycisku
MODE raz spowoduje wyświetlenie aktualnego prądu twornika, dwa razy
aktualnego napięcia twornika.
Rozdzielnica uruchomiona. Po uruchomieniu znika informacja „OFF” i
wyświetlana jest aktualna prędkość obrotowa silnika. W tym przypadku 0
[Obr./min.].
Aktualna wartość średnia prądu twornika silnika podana w
amperach. W tym przypadku 100 [A].
Aktualna wartość średnia napięcia twornika silnika podana w
woltach. W tym przypadku 10 [V].
Wyświetlana informacja o awarii, wraz z kodem awarii. W tym
przypadku wyświetlana informacji o awarii, o kodzie nr 2 (Przekroczenie
dopuszczalnego prądu twornika prądnicy).
14
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Obsługa stanów awaryjnych prostownika DML
Po wystąpieniu awarii na lokalnym panelu kontrolnym zostanie wyświetlona liczba, kod awarii, określająca
jej przyczynę. Każde wystąpienie awarii podczas działania układu spowoduje jego wyłączenie. Układu będącego
w stanie awaryjnym, nie można uruchomić, w tym czasie próba uruchomienia przyciskiem start na drzwiach
rozdzielnicy będzie ignorowana.
Po ustąpieniu przyczyn awarii, przyciskiem kasowania awarii możliwe jest przywrócenie układu do
normalnego trybu pracy i ponowne jego uruchomienie. Przed wciśnięciem przycisku kasowania należy
przełączyć przełącznik S3 STOP/START. Przycisk kasowania awarii należy przytrzymać do momentu
zniknięcia, z wyświetlacza panelu kontrolnego, informacji o awarii, nie krócej niż 0,8 sekundy.
Skasowanie awarii możliwe jest tylko wtedy, gdy układ został wyłączony czyli po przełączeniu
przycisku S3 w pozycję STOP. W przeciwnym przypadku przycisk kasowania awarii jest ignorowany.
Tab. 6. Kody awarii
Kod
Err 1
Err 2
Err 3
Err 4
Err 5
Err 6
Err 15
Znaczenie/uwagi
Przekroczenie dopuszczalnego prądu twornika, ponad wartość 1,2 razy prąd znamionowy.
Sprawdzić obwód twornika czy nie nastąpiło zwarcie.
Sprawdzić tor pomiaru prądu twornika.
Urwanie enkodera. Występuje w przypadku gdy po uruchomieniu zostaje podane napięcie na
zaciski obwodu twornika i brak jest sygnału z enkodera potwierdzającego obrót wału silnika.
Może wystąpić podczas uszkodzenia enkodera, nieprawidłowego jej podłączenia, bądź trwałego
unieruchomienia wału maszyny.
Naciśnięcie przycisku awaryjnego zatrzymania. Powoduje awaryjne zatrzymanie pracy
rozdzielnicy i wyłączenie wyłącznika RA-Q1. Procedura wyłączania może trwać do 1[s]. Aby
możliwe było późniejsze skasowania awarii przycisk awaryjnego zatrzymania należy wycisnąć.
Brak wzbudzenia. Prąd obwodu wzbudzenia silnika nie przekroczył wartości 0.9 prądu
znamionowego. Sprawdzić obwód wzbudzenia silnika i tor pomiaru prądu wzbudzenia.
Awaria obwodu twornika. Występuje gdy wpływając na obwód wzbudzenia prądnicy układ
nie ma możliwości regulacji prądu lub napięcia obwodu twornika, świadczyć to może o:
- uszkodzeniu toru pomiarowego prądu lub napięcia obwodu twornika
- fałszywym sygnale z rozdzielnicy MMB- 12 napędzającej maszynę prądu stałego
Przekroczenie dopuszczalnej temperatury radiatora jednego z tyrystorów.
Obciążenie przekształtnika tyrystorowego jest za duże bądź temperatura wewnątrz rozdzielnicy
jest za wysoka.
Awaria rezystora hamowania. Występuje gdy przekształtnik tyrystorowy przechodzi do pracy
silnikowej i energia przekazana do silnika indukcyjnego przekracza 1000Ws.
Załącznik 3
Program konsoli operatora TKombajn
Konsola TKombajn została opracowana do komunikacji pomiędzy komputerem PC oraz sterownikiem
mikroprocesorowym SH65L przy użyciu interfejsu szeregowego RS232.
Po uruchomieniu programu konsoli należy w pierwszej kolejności wybrać plik z programem, który ma
zostać załadowany do pamięci procesora sterownika SH65L. W tym celu należy użyć klawisza oznaczonego
jako [*.ldr]. Za pomocą opisanego klawisza następuje. Jeśli wybrany plik jest poprawny to ścieżka dostępu do
pliku zostanie wyświetlona na zielonym pasku pod klawiszem [*.ldr] oraz w dolnym oknie dialogowym.
Ładowanie programu dla sterownika SH65L odbywa się za pomocą klawisza [load *.ldr]. Wysłanie pliku
do sterownika przez interfejs RS232 jest potwierdzone komunikatem „Program loaded” w dolnym oknie
dialogowym wraz z wyświetleniem godziny komunikaty.
Załączenie oraz wyłączenie falownika odbywa się za pomocą klawiszy [ON] oraz [OFF]. Po prawej stronie
klawiszy znajdują się dwa zadajniki, Pierwszy z lewej jest zadajnikiem prędkości silnika natomiast drugi jest
zadajnikiem strumienia wirnika. Za pomocą strzałek można zwiększyć lub zmniejszyć wartość zadaną. Zmiana
jest dokonywana o 0,01 wartości. Zmiana wartości zadanej może odbywać się też przez bezpośrednie wpisanie
w oknie i naciśnięcie klawisza [ENTER].
W programie Tkombajn występują 3 zakładki: [Variables], [Control], [Registration].
Zakładka [Variables] (rys. 9) służy do kontrolowania zmiennych umieszczonych w pamięci procesora. Ich
nazwę wpisuje się w pola edycyjne opisane jako „Name”. Jeżeli pole edycyjne ma błękitne tło, oznacza to, że
dana zmienna jest umieszczona w mapie pamięci procesora, w innym przypadku pole posiada tło czerwone,
należy wtedy sprawdzić poprawność wpisanej nazwy zmiennej. Zmienne aktualnie kontrolowane posiadają obok
15
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
swojej nazwy zielony kwadrat, natomiast zmienne nie kontrolowane posiadają czerwony kwadrat. Aby
kontrolować daną zmienną lub aby wyłączyć kontrolę nad zmienną należy myszką kliknąć w kwadrat, poczym
powinien on zmienić swój kolor.
Rys. 9. Okno programu Tkombajn – zakładka [Variables]
Zmienne oznaczone jako kontrolowane mogą zostać nadpisane lub odczytane przez użytkownika. Odczyt
wartości zmiennej następuje przez naciśnięcie klawisza [RD], wartość odczytana zostanie wyświetlona po
prawej stronie nazwy zmiennej w kolumnie oznaczonej „Read”. Nadpisanie wartości danej zmiennej następuje
po wciśnięciu klawisza [WR]. Wartość która zostanie wpisana pod daną zmienną należy umieścić po prawej
stronie zmiennej w kolumnie „Value to write”. Zaznaczenie pola „Automatyczny odczyt” powoduje odczytanie
wartości zmiennej z pamięci procesora co 0,5s.
Zakładka [Control] usłuży do uruchamiania dodatkowych funkcji sterujących oraz kontroli stanu pracy
układu. W badanym układzie laboratoryjnym zakładka ta nie jest wykorzystywana.
Okno zakładki [Registration] (rys. 10) umożliwia przeprowadzenie rejestracji zmiennych procesora.
Zmienne przeznaczone do rejestracji wpisuje się w pierwszej kolumnie i zatwierdza klawiszem [ENTER]. Druga
kolumna służy do ustalenia warunku ( < - mniejszy niż; > - większy niż; = - równy), który ma zostać spełniony
do rozpoczęcia rejestracji. Trzecia kolumna umożliwia wpisanie wartości do spełnienia przez zadany wcześniej
warunek Z lewej strony nazwy zmiennej umieszczone zostały szare pola. Kliknięcie myszką spowoduje zmianę
na kolor zielony i jednocześnie włączenie warunku, który ma zostać spełniony podczas rejestracji.
16
Układ napędowy z silnikiem indukcyjnym i falownikiem napięcia – metoda sterowania polowo zorientowanego
Rys. 10. Okno programu Tkombajn – zakładka [Registration]
W zakładce [Registration] dostępne są 4 klawisze służące odpowiednio do:
[Reg start] – uruchomienie rejestracji,
[Download] – ściągnięcie danych ze sterownika do komputera,
[Fig–fst] oraz [Fig-bcb] - uruchamiają dwa programy do prezentacji zarejestrowanych danych.
Dane zarejestrowane znajdują się w katalogu, w którym umieszczony jest program konsoli jako plik
tekstowy z rozszerzeniem „*.dat”.
W zakładce jest dostępny również pasek „Trigger”. Jego pozycja oznacza miejsce spełnienia warunku
wybranego przy ustawianiu rejestracji zmiennych.
17