Topologia
Notatki do wykładu dla studentów Matematyki Komputerowej
Marian Mrozek
Uniwersytet Jagielloński
17 października 2012
2
Spis treści
1 Wprowadzenie
1.1 Przedmiot topologii . . . . . . . . . . . . . . . .
1.2 Korzenie topologii . . . . . . . . . . . . . . . . .
1.2.1 Problem Królewiecki . . . . . . . . . . .
1.2.2 Wzór Eulera dla wielościanów wypukłych
1.2.3 Teoria mnogości Cantora . . . . . . . . .
1.2.4 Analysis Situs Henri Poincarégo . . . . .
1.3 Cel i metody topologii . . . . . . . . . . . . . .
1.3.1 Cel topologii . . . . . . . . . . . . . . . .
1.3.2 Metody topologii . . . . . . . . . . . . .
1.3.3 Homotopie . . . . . . . . . . . . . . . . .
1.4 Zastosowania . . . . . . . . . . . . . . . . . . .
1.4.1 Grafika rastrowa . . . . . . . . . . . . .
1.4.2 Zbiory kostkowe . . . . . . . . . . . . . .
1.4.3 Analiza obrazów . . . . . . . . . . . . .
1.4.4 Grafika rastrowa trój- i czterowymiarowa
1.4.5 Zliczanie dziur . . . . . . . . . . . . . . .
1.4.6 Sieci sensorowe . . . . . . . . . . . . . .
1.4.7 Najnowsze zastosowania topologii . . . .
1.4.8 Ćwiczenia . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Przestrzenie metryczne
2.1 Przestrzenie metryczne . . . . . . . . . . . . . . .
2.1.1 Przestrzeń metryczna . . . . . . . . . . . .
2.1.2 Przykłady metryk w Rd . . . . . . . . . .
2.1.3 Kule . . . . . . . . . . . . . . . . . . . . .
2.1.4 Zbiory ograniczone . . . . . . . . . . . . .
2.2 Odległość zbiorów i średnica zbiorów . . . . . . .
2.2.1 Odległość zbiorów . . . . . . . . . . . . . .
2.2.2 Średnica zbioru . . . . . . . . . . . . . . .
2.3 Zbiory otwarte i domknięte, wnętrze, domknięcie i
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
8
8
10
11
11
11
12
13
14
14
15
15
16
16
18
19
19
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
brzeg zbioru
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
21
21
22
23
24
25
25
26
26
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
SPIS TREŚCI
2.4
2.5
2.3.1 Wnętrze, domknięcie i brzeg zbioru . . . . . . . . . . . . .
2.3.2 Własności wnętrza i domknięcia . . . . . . . . . . . . . . .
Otoczenia, punkty skupienia . . . . . . . . . . . . . . . . . . . . .
2.4.1 Rodzina otoczeń punktu . . . . . . . . . . . . . . . . . . .
2.4.2 Punkty skupienia zbioru . . . . . . . . . . . . . . . . . . .
Metryki równoważne, topologia przestrzeni metrycznej . . . . . .
2.5.1 Fundamentalne własności zbiorów otwartych i domkniętych
2.5.2 Normy równoważne . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
29
30
30
30
31
31
33
3 Przestrzenie topologiczne
3.1 Podstawowe pojęcia. . . . . . . . . . . . . . . .
3.1.1 Definicja przestrzeni topologicznej. . . .
3.1.2 Baza otoczeń punktu. . . . . . . . . . . .
3.1.3 Aksjomat Hausdorffa . . . . . . . . . . .
3.1.4 Przestrzenie metryzowalne. . . . . . . . .
3.1.5 Baza topologii . . . . . . . . . . . . . . .
3.2 Granica funkcji . . . . . . . . . . . . . . . . . .
3.3 Ciągłość funkcji . . . . . . . . . . . . . . . . . .
3.3.1 Ciągłość funkcji . . . . . . . . . . . . . .
3.3.2 Kryteria ciągłości . . . . . . . . . . . . .
3.3.3 Ciągłość złożenia . . . . . . . . . . . . .
3.3.4 Ciągłość operacji arytmetycznych . . . .
3.3.5 Przykłady odwzorowań ciągłych. . . . .
3.4 Topologia porządkowa, indukowana, produktowa
3.4.1 Topologia porządkowa . . . . . . . . . .
3.4.2 Topologia indukowana . . . . . . . . . .
3.4.3 Topologia produktowa . . . . . . . . . .
3.4.4 Topologia ilorazowa . . . . . . . . . . . .
3.5 Aksjomat przeliczalności . . . . . . . . . . . . .
3.5.1 Baza otoczeń punktu. . . . . . . . . . . .
3.5.2 Aksjomat przeliczalności . . . . . . . . .
3.5.3 Charakteryzacje ciągowe . . . . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
i ilorazowa
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
35
35
35
36
37
37
38
39
39
40
40
41
41
42
42
43
43
44
47
47
47
48
4 Zwartość, spójność i zupełność
4.1 Zwartość . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Przyczyny braku zbieżności. . . . . . . .
4.1.2 Przestrzenie zwarte . . . . . . . . . . . .
4.1.3 Charakterystyka zbiorów zwartych w Rn .
4.1.4 Liczba Lebesque’a . . . . . . . . . . . . .
4.1.5 Przestrzenie lokalnie zwarte . . . . . . .
4.2 Ciągłość, a zwartość . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
49
49
51
53
56
57
57
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
SPIS TREŚCI
4.3
4.4
4.2.1 Obraz zbioru zwartego przez odwzorowanie ciągłe. . .
4.2.2 Funkcja ciągła na zbiorze zwartym o wartościach w R
4.2.3 Funkcja odwrotna do funkcji ciągłej . . . . . . . . . .
4.2.4 Jednostajna ciągłość . . . . . . . . . . . . . . . . . .
4.2.5 Funkcje Lipschitza . . . . . . . . . . . . . . . . . . .
Spójność . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Przestrzenie spójne . . . . . . . . . . . . . . . . . . .
4.3.2 Składowe spójne . . . . . . . . . . . . . . . . . . . .
4.3.3 Ciągłość, a spójność . . . . . . . . . . . . . . . . . .
4.3.4 Obraz zbioru spójnego przez odwzorowanie ciągłe. . .
4.3.5 Własność Darboux. . . . . . . . . . . . . . . . . . . .
Zupełność . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Warunek Cauchy’ego . . . . . . . . . . . . . . . . . .
4.4.2 Przestrzenie zupełne . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
osiąga swoje kresy
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
57
58
58
59
60
61
61
62
63
63
64
64
64
65
5 Wielościany.
5.1 Kompleksy symplicjalne. . . . . . . . . . . . . .
5.1.1 Wypukłość. . . . . . . . . . . . . . . . .
5.1.2 Współrzędne barycentryczne. . . . . . .
5.1.3 Sympleksy . . . . . . . . . . . . . . . . .
5.1.4 Kompleksy symplicjalne . . . . . . . . .
5.1.5 Własności kompleksów symplicjalnych. .
5.1.6 Stożki. . . . . . . . . . . . . . . . . . . .
5.2 Przestrzenie homotopijne . . . . . . . . . . . . .
5.2.1 Homotopia . . . . . . . . . . . . . . . . .
5.2.2 Homotopijność przestrzeni . . . . . . . .
5.2.3 Przestrzenie ściągalne . . . . . . . . . . .
5.3 Odwzorowania . . . . . . . . . . . . . . . . . . .
5.3.1 Podziały symplicjalne . . . . . . . . . . .
5.3.2 Odwzorowania symplicjalne . . . . . . .
5.3.3 Lemat Spernera . . . . . . . . . . . . . .
5.3.4 Twierdzenie Brouwera o punkcie stałym
5.3.5 Retrakty. . . . . . . . . . . . . . . . . .
5.3.6 Gwiazdy. . . . . . . . . . . . . . . . . . .
5.3.7 Aproksymacja symplicjalna. . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
67
67
68
68
69
71
73
74
74
75
76
76
76
78
80
81
83
84
84
6 Wprowadzenie w topologię algebraiczną
6.1 Wprowadzenie w teorię grup. . . . . . . .
6.1.1 Grupa. . . . . . . . . . . . . . . .
6.1.2 Podgrupy i grupy ilorazowe. . . .
6.1.3 Homomorfizmy grup. . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
87
87
87
88
88
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
SPIS TREŚCI
6.2
6.3
6.4
6.5
6.1.4 Generatory grupy. . . . . . . . . . . . . . .
Grupa podstawowa . . . . . . . . . . . . . . . . .
6.2.1 Przedziały . . . . . . . . . . . . . . . . . .
6.2.2 Drogi . . . . . . . . . . . . . . . . . . . . .
6.2.3 Grupa podstawowa . . . . . . . . . . . . .
6.2.4 Grupa krawędziowa . . . . . . . . . . . . .
Obliczanie grupy podstawowej . . . . . . . . . . .
6.3.1 Grupy wolne, skończenie generowane . . .
6.3.2 Obliczanie grupy krawędziowej . . . . . . .
6.3.3 Grupa podstawowa okręgu. . . . . . . . .
Homologie symplicjalne nad Z2 . . . . . . . . . .
6.4.1 Łańcuchy, cykle i brzegi . . . . . . . . . .
6.4.2 Grupy homologii . . . . . . . . . . . . . .
6.4.3 Algorytm wyznaczania grup homologii nad
6.4.4 Charakterystyka Eulera-Poincaré. . . . . .
Homologie symplicjalne nad Z. . . . . . . . . . .
6.5.1 Algorytm wyznaczania grup homologii nad
6.5.2 Homomorfizm indukowany . . . . . . . . .
6.5.3 Twierdzenie Lefschetza o punkcie stałym. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
Z2
. .
. .
Z2
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
89
89
89
90
92
95
97
98
100
101
102
103
104
105
108
109
111
112
112
Rozdział 1
Wprowadzenie
1.1
Przedmiot topologii
Topologia jest stosunkowo młodą dziedziną matematyki. Zajmuje się ona przestrzeniami topologicznymi, to jest zbiorami ze strukturą opisującą sąsiedztwo punktów, co umożliwia podanie ogólnej definicji
odwzorowań ciągłych. Dwie przestrzenie topologiczne uważane są za nieodróżnialne metodami topologicznymi jeżeli istnieje pomiędzy nimi ciągła bijekcja, której bijekcja odwrotna też jest ciągła. Mówimy
wtedy, że przestrzenie są homeomorficzne, a stosowną bijekcję nazywamy homeomorfizmem. Głównym
celem topologii jest klasyfikacja przestrzeni topologicznych w szczególności poprzez konstruuowanie tzw.
niezmienników, najczęściej pewnych cech, liczb, grup lub klas równoważności względem pewnej relacji,
które są takie same dla przestrzeni homeomorficznych.
Warto od początku uświadomić sobie, że homeomorficzne mogą być przestrzenie, które w codziennym
spojrzeniu uchodzą za bardzo różne. Jako klasyczy przykład podaje się tutaj przykład wypełnionego
torusa i garnuszka z uchem, które są bardzo niepodobne, a jednak homeomorficzne (rys.1.1). Tak więc
homeomorficzność jest relacją, która bardzo wiele utożsamia. Może być to odbierane jako słabość teorii,
Rysunek 1.1: Od lewej: kubek, kubek wypełniony, kubek zdeformowany, torus (żródło: Wikipedia)
7
8
ROZDZIAŁ 1. WPROWADZENIE
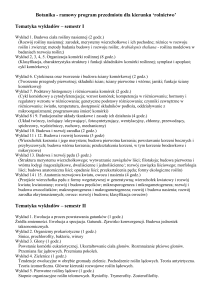
Rysunek 1.2: Leonhard Euler, 1707-1783 (źródło: Wikipedia)
w istocie jednak jest dokładnie odwrotnie: Jeśli niewiele wiemy o dwóch przestrzeniach, a tak często jest
w wielu zastosowaniach, to stwierdzenie, że te przestrzenie są różne często najłatwiej osiągnąć metodami
topologicznymi.
1.2
Korzenie topologii
Choć topologia jest dziedziną młodą, jej korzeni można się dopatrzyć w pewnych problemach analizowanych już w XVIII i XIX wieku.
1.2.1
Problem Królewiecki
Tzw. problem królewiecki (rys. 1.3) polega na takim zaplanowaniu spaceru ulicami Królewca, by przez
każdy z jego siedmiu mostów na przepływającej przez miasto rzece Pregel przejść dokładnie raz. Mosty
łączą ze sobą przeciwległe brzegi rzeki oraz leżące na rzece wyspy. W 1735 roku szwajcarski matematyk
Leonhard Euler (ryc. 1.2) pokazał, że problem ten nie posiada rozwiązania. Metoda zastosowana przez
Eulera uważana jest za pierwszy przykład topologicznego podejścia do problemu w matematyce.
1.2.2
Wzór Eulera dla wielościanów wypukłych
Leonhard Euler jest też autorem odkrycia wiążącego ilość wierzchołków, krawędzi i ścian w wielościanie
wypukłym.
1.2. KORZENIE TOPOLOGII
9
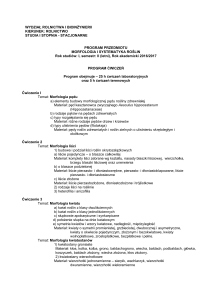
Rysunek 1.3: Od lewej: mapa Królewca z czasów Eulera z wyeksponowaną rzeką Pregel i mostami, wersja "topologiczna" mapy abstrahująca od kształtu rzeki i przebiegu ulic, reprezentacja grafowa (źródło:
Wikipedia)
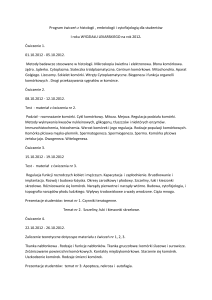
Rysunek 1.4: Dwunastościan (żródło: Wikipedia). Ma on 20 wierzchołków, 30 krawędzi i 12 ścian.
10
ROZDZIAŁ 1. WPROWADZENIE
Rysunek 1.5: Georg Cantor, 1845-1918 (źródło: Wikipedia)
Twierdzenie 1.2.1 Niech V , E, F oznaczają odpowiednio ilość wierzchołków, krawędzi i ścian wielościanu. Dla dowolnego wielościanu wypukłego zachodzi wzór
V − E + F = 2.
Na przykład dla dwunastościanu (rys. 1.4) mamy 20−30+12 = 2. Twierdzenie to na pierwszy rzut oka
nie wydaje się być twierdzeniem topologicznym, ale po głębszych badaniach okazuje się, że wyrażenie V −
E + F jest niezmiennikiem topologii wielościanu, to znaczy wartość tego wyrażenia jest zawsze taka sama
dla wielościanów homeomorficznych. W szczególności wielościany wypukłe, to wielościany homeomorficzne
ze sferą, a dla sfery ten niezmiennik wynosi właśnie dwa.
1.2.3
Teoria mnogości Cantora
Badania zbiorów prowadzone przez niemieckiego matematyka Georga Cantora pod koniec XIX wieku
pozwoliły rozszerzyć pojęcie równoliczności zbiorów z przypadku skończonego na nieskończony. W szczególności Cantor pokazał, że zbiór liczb naturalnych i rzeczywistych nie są równoliczne, ale zbiór liczb
naturalnych i wymiernych są równoliczne. Wyciągnął stąd wniosek, że teoria mnogości nie wystarcza do
odróżnienia zbioru liczb naturalnych od zbioru liczb wymiernych co naprowadziło go na rozważania sąsiedztwa (otoczenia) liczby w zbiorze liczb naturalnych i wymiernych, które są istotnie różne. W małym
sąsiedztwie liczby naturalnej nie ma nic poza nią, natomiast w każdym sąsiedztwie liczby wymiernej są
inne liczby wymierne. Pojęcie sąsiedztwa stało się później fundamentalnym pojęciem topologicznym.
1.3. CEL I METODY TOPOLOGII
11
Rysunek 1.6: Henri Poincaré, 1854-1912 (źródło: Wikipedia)
1.2.4
Analysis Situs Henri Poincarégo
W 1895 roku słynny matematyk francuski Henri Poincaré opublikował pracę zatytuowaną Analysis
Situs, która uchodzi za pierwszą pracę w dziedzinie topologii. Choć współczensa terminologia jest inna, to w pracy tej znajdziemy ideę homeomorficznych podzbiorów Rn i poszukiwania cech współnych
(niezmienników) charakteryzujących podzbiory homeomorficzne. W szczególności Poincaré wprowadził
metody kombinatoryczne do poszukiwania takich niezmienników, co doprowadziło go do zdefiniowania
tzw. liczb Bettiego dla wielościanów. Obrazowo mówiąc zliczają one ilość dziur w wielościanie. Swoją publikacja Poincaré nie tylko dał początek tzw. topologii ogólnej, ale również tzw. topologii algebraicznej,
przejściowo zwanej również kombinatoryczną.
1.3
1.3.1
Cel i metody topologii
Cel topologii
Celem topologii jest tworzenie narzędzi pozwalających odróżniać i klasyfikować zbiory (przestrzenie topologiczne) metodami nieco bardziej wymagającymi niż samo zliczanie elementów (tym zamuje się teoria
mnogości), ale ciągle pozwalającymi na utożsamianie dość niepodobnych do siebie zbiorów.
W szczególności topologia nie dopuszcza metod wymagających mierzenia odległości, bądź kątów. Litery
w pierwszym i drugim wierszu na rys. 1.7 są nierozróżnialne metodami topologicznymi.
Takie ogólne spojrzenie jest szczególnie przydatne wtedy, gdy o zbiorze wiemy niewiele, w szczególności
zbyt mało, by mierzenie było możliwe.
12
ROZDZIAŁ 1. WPROWADZENIE
Rysunek 1.7: Litery w pierwszym wierszu są nierozróżnialne metodami topologicznymi. Podobnie litery
w drugim wierszu.
Rysunek 1.8: Okrąg i pierścień są odróżnialne topologicznie, bo w okręgu małe otoczenie punktu na okręgu
rozpada się na kawałki po usunięciu punktu, a w pierścieniu nie.
1.3.2
Metody topologii
Topologię dzielimy na topologię ogólną i topologię algebraiczną. W topologii algebraicznej używamy narzędzi algebraicznych do porównywania przestrzeni topologicznych. W topologii ogólnej są to narzędzia
budowane specjalnie dla topologii. Na przykład okrąg i pierścień są odróżnialne topologicznie, bo w okręgu małe otoczenie punktu na okręgu rozpada się na kawałki po usunięciu punktu, a w pierścieniu nie
(rys. 1.8). Rozróżnienie to wprowadzamy przy użyciu pojęć topologicznych takich jak otoczenie oraz rozpad na kawałki.
Liczenie kawałków przestrzeni, czyli tak zwanych składowych spójnych ma związek z badaniem istnienia dziur w przestrzeni. Dziury w przestrzeni to też pojęcie topologiczne, które zlicza się metodami
kombinatorycznymi i algebraicznymi. Pierwotnie wymagało to zawężęnia się do przestrzeni, które dają się
"zbudować z klocków" (rys. 1.9)
1.3. CEL I METODY TOPOLOGII
13
Rysunek 1.9: Przestrzenie topologiczne "zbudowane z klocków": z czworościanów (po lewej) i sześcianów
(po prawej)
Topologia cechuje się swoistą dwoistością charakteru. Z jednej strony koncepcja ciągłości wymaga rozważania zbiorów nie tylko nieskończonych, ale często nieprzeliczalnych. Z drugiej strony ważne "wzorcowe"
przestrzenie topologiczne buduje się ze skończonej ilości odpowiednio posklejanych klocków. Umożliwa to
badanie przestrzeni topologicznych metodami kombinatorycznymi i algebraicznymi.
1.3.3
Homotopie
Jednym ze szczególnych narzędzi używanych do badania przestrzeni topologicznych jest homotopia. Mówiąc obrazowo homotopia to ciągła deformacja jednego odwzorowania w inne. Szczególnie interesujące
są odwzorowania homotopijne z identycznością. Są to takie topologiczne identyczności. Dwie przestrzenie
X i Y są homotpijne, jeżeli istnieją odwzorowania ciągłe f : X → Y oraz g : Y → X takie, że g ◦ f
jest homotopijne z identycznością na X, a f ◦ g jest homotopijnej z identycznością na Y . Homotopijność jest jeszcze słabszą relacją niż homeomorficzność. Na przykład przestrzeń jednopunktowa nie jest
homeomorficzna z odcinkiem [0, 1], ale jest z nim homotopijna. Podobnie okrąg i pierścień nie są homeomorficzne, ale są homotopijne. Pożytek z homotopii jest taki, że jeśli przestrzenie nie są homotopijne, to
nie są homeomorficzne. Ponieważ jest więcej niezmienników dla homotopii niż dla homeomorfizmu, więc
brak homotopijności łatwiej stwierdzić niż brak homeomorficzności. W praktyce wszystkie niezmienniki
topologii algebraicznej są niezmiennikami homotopii.
14
ROZDZIAŁ 1. WPROWADZENIE
Rysunek 1.10: Automatycznie rejestrowane obrazy cyfrowe zapisywane są w postaci grafiki rastrowej
1.4
Zastosowania
Choć topologia powstała dopiero u zarania XX wieku, bardzo szybko uzyskała status fundamentalnego
działu matematyki teoretycznej. Jednak dopiero pod koniec ubiegłego wieku dostrzeżono, że ma ważne
zastosowania poza matematyką, m.in. w biologii, biologii molekularnej, medycynie, materiałoznawstwie,
inżynierii i informatyce. Dlatego od końca XX wieku obok topologii teoretycznej bujnie rozwija się też
topologia stosowana i obliczeniowa.
1.4.1
Grafika rastrowa
Grafika rastrowa składa się z dużej ilości kwadracików (pixeli) o jednolitych kolorach (rys. 1.10). Po dokonaniu progowania (zamianie kolorów ciemniejszych od ustalonego progu na czarny, a jaśniejszych na biały)
otrzymujemy przestrzeń topologiczną zbudowaną z klocków (kwadratów, rys. 1.11), którą możemy badać
metodami topologii algebraicznej. Tego typu techniki stosowane są w automatycznej analizie obrazów.
1.4. ZASTOSOWANIA
15
Rysunek 1.11: W przypadku grafiki czarno-białej grafika rastrowa jest przykładem zbioru kostkowego
Rysunek 1.12: Od lewej: 1) Zdjęcie powierzchni Księżyca. 2) Segmentacja wydzielająca najczarniejszą część
zdjęcia. Jej składowe spójne odpowiadają kraterom. 3) Negatyw segmentacji: białe dziury odpowiadają
kraterom.
1.4.2
Zbiory kostkowe
Zbiory kostkowe to zbiory w Rn , które są skończonymi sumami kostek.
1.4.3
Analiza obrazów
Koncepcja spójności i składowej spójnej, jedno z podstawowych pojęć topologicznych jest szeroko wykorzystywana w analizie obrazów. Przykładowo, jeśli chcemy zautomatyzować liczenie ilości kraterów na
zdjęciu powierzchni Księżyca (rys. 1.12), dokonujemy segmentacji zdjęcia zastępując kolory odpowiednio ciemnie kolorem czarnym, a pozostałe kolorem białym i liczymy ilość składowych spójnych zbioru w
kolorze czarnym. Podobny efekt uzyskamy licząc ilość białych dziur w negatywie segmentacji.
Analiza ilości dróg w labiryncie (rys. 1.13) też sprowadza się do liczenia ilości składowych spójnych.
16
ROZDZIAŁ 1. WPROWADZENIE
Rysunek 1.13: Ilość różnych dróg w tym labiryncie to ilość różnych składowych spójnych.
Ciekawsze pod względem analizy topologicznej są obrazy trójwymiarowe, na przykład pozyskiwane
techniką tomografii komputerowej bądź poprzez symulacje numeryczne stosownych równań. Efekt jednej
z takich symulacji dla kryształu powstającego ze stopienia żelaza i chromu przedstawiono na rys. 1.14
1.4.4
Grafika rastrowa trój- i czterowymiarowa
• Metody tomografii komputerowej pozwalają otrzymać grafikę rastrową trówymiarową
• Dodatkowo uwzględnienie czasu prowadzi do grafiki rastrowej czterowymiarowej
1.4.5
Zliczanie dziur
• Wszystkie przedstawione przykłady sprowadzają się do problemu liczenia ilości "dziur" w zbiorach
kostkowych
• Dziury zerowymiarowe pojawiają się przy zliczaniu ilości składowych spójnych zbioru kostkowego
• Dziury jednowymiarowe w przypadku zbioru dwuwymiarowego to tradycyjne, zwykłe dziury
1.4. ZASTOSOWANIA
17
Rysunek 1.14: Efekt symulacji numerycznej krystalizowania stopu żelaza i chromu. Odpowiedź na pytanie
ile różnych kanałów biegnie przez ten kryształ ma kluczowe znaczenie w przewidywaniu jego fizykochemicznych własności.
Rysunek 1.15: Przekrój trójwymiarowej grafiki rastrowej serca otrzymany metodami tomografii komputerowej.
18
ROZDZIAŁ 1. WPROWADZENIE
Rysunek 1.16: Sieć sensorów.
Rysunek 1.17: Kontrolowanie pokrycia poprzez tzw. kompleks Čecha.
• Dziury jednowymiarowe w przypadku zbioru trójwymiarowego to biegnące przez ten zbiór tunele
• Dziury dwuwymiarowe w przypadku zbioru trójwymiarowego to leżące wewnątrz tego zbioru puste
obszary
1.4.6
Sieci sensorowe
Sieci sensorowe wykorzystywane są do monitorowania wymagających kontroli obszarów. Może to chodzić
o ochronę terenu przed niepowołanymi osobami, zapobieganie pożarom czy skażeniom. Sensory rozmieszczane są losowo na przykład poprzez rozrzucanie ich z samolotu. Pojawia się tu problem pokrycia: czy
cały obszar jest w zasięgu sensorów? (rys. 1.16).
Problem może być rozwiązany metodami topologii algebraicznej. Sensory komunikują się ze sobą poprzez sieć radiową, co pozwala skonstruować graf sąsiadów. Pozwala to na zbudowanie wielościanu w taki
sposób, że ewentualne luki pokrycia objawiają się jako dziury w wielościanie, których obecność może być
wykryta metodami topologii algebraicznej (rys. 1.17.
1.4. ZASTOSOWANIA
1.4.7
19
Najnowsze zastosowania topologii
• Konstantin Mischaikow oraz autor tych notatek w 1995 roku pokazali, że metody topologii obliczeniowej mogą być z powodzeniem używane do komputerowo wspieranej ścisłej analizy struktury
rozwiązań równań różniczkowych
• Maurice Herlihy oraz Nir Shavit w 1999 roku pokazali, że zagadnienie istnienia protokołu (algorytmu) pozwalającego n asynchronicznym procesom rozwiązywać zagadnienia decyzyjne może być
sformułowane i rozwiązane w oparciu o metody topologii algebraicznej
• Martin Raussen pokazał w 2010 roku, że zagadnienie analizy ilości różnych przebiegów egzekucji
programu przez n konkurujących o zasoby procesorów może być rozwiązane metodami topologii
algebraicznej
1.4.8
Ćwiczenia
Ćwiczenie 1.4.1 Spróbuj rozstrzygnąć, które z poniższych par przestrzeni topologicznych są homeomorficzne, a które nie są. Zastanów się nad możliwym uzasadnieniem
1. przestrzeń liczb naturalnych N i przestrzeń liczb wymiernych Q
2. przestrzeń liczb rzeczywistych R i przestrzeń liczb wymiernych Q
3. przestrzeń jednopunktowa {0} i przedział domknięty [0, 1]
4. przestrzeń R i przedział otwarty (−1, 1).
5. przedział [0, 1) i przedział [0, ∞)
6. przedział domknięty [0, 1] i i przedział otwarty (−1, 1).
20
ROZDZIAŁ 1. WPROWADZENIE
Ćwiczenie 1.4.2 Spróbuj rozstrzygnąć, które z poniższych par przestrzeni topologicznych są homeomorficzne, a które nie są. Zastanów się nad możliwym uzasadnieniem
1. przestrzeń { n1 | n ∈ N } i przestrzeń N
2. przestrzeń { n1 | n ∈ N } ∪ {0} i przestrzeń N
3. brzeg kwadratu { (x, y) ∈ R2 | max(|x|, |y|) = 1 } i okrąg { (x, y) ∈ R2 | x2 + y 2 = 1 }
4. sześciań { (x, y, z) ∈ R3 | max(|x|, |y|, |z|) ¬ 1 } i kula { (x, y, z) ∈ R3 | x2 + y 2 + z 2 ¬ 1 }
5. okrąg { (x, y) ∈ R2 | x2 + y 2 = 1 } i pierścień { (x, y) ∈ R2 | 1 ¬ x2 + y 2 ¬ 2 }
6. przestrzeń R2 i przestrzeń R3
Ćwiczenie 1.4.3 Zastanów się, które z poniższych własności są własnościami topologicznymi podprzestrzeni X przestrzeni Rd , a które nie są.
1. istnieją x ∈ X oraz R > 0 takie, że X ⊂ K(x, R).
2. własność punktu stałego: dla każdego ciągłego odwzorowania f : X → X istnieje punkt stały
dla f , tzn. x0 ∈ X takie, że f (x0 ) = x0 .
3. własność punktu okresowego: dla każdego ciągłego odwzorowania f : X → X istnieje punkt
okresowy dla f , tzn. x0 ∈ X oraz n > 1 takie, że f n (x0 ) = x0 .
4. istnieje x ∈ X oraz r > 0 takie, że X ∩ K(x, r) = {x}.
5. dla każdego x ∈ X istnieje r > 0 takie, że X ∩ K(x, r) = {x}.
6. dla każdego x, y ∈ X jeśli x 6= y to istnieje r > 0 takie, że X ∩ K(x, r) = {x}.
Ćwiczenie 1.4.4 Oceń, czy własność punktu stałego/okresowego mają:
1. koło { (x, y) ∈ R2 | x2 + y 2 ¬ 1 }
2. okrąg { (x, y) ∈ R2 | x2 + y 2 = 1 }
3. kula { (x, y, z) ∈ R3 | x2 + y 2 + z 2 ¬ 1 }
4. sfera { (x, y, z) ∈ R3 | x2 + y 2 + z 2 = 1 }
Rozdział 2
Przestrzenie metryczne
Wiemy z kursu analizy, że pojęcie metryki pozwala na podanie stosunkowo ogólnej definicji granicy.
Przypomnimy teraz pojęcie metryki i pojęcia na koncepcji metryki oparte.
2.1
2.1.1
Przestrzenie metryczne
Przestrzeń metryczna
Definicja 2.1.1 Odległością (metryką) w zbiorze X nazywamy odwzorowanie
ρ : X × X → R∗
spełniające własności
(i) ρ(x, y) = 0 ⇔ x = y,
(ii) ρ(x, y) = ρ(y, x),
(iii) ρ(x, z) ¬ ρ(x, y) + ρ(y, z).
Parę (X, ρ) nazywamy przestrzenią metryczną.
21
22
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
Rysunek 2.1: Odległość punktów x, y ∈ R2 w metryce euklidesowej (zielony), Manhattan (niebieski) i
maksimum (czerwony).
2.1.2
Przykłady metryk w Rd
Dla x = (xi )i=1,n , y = (yi )i=1,n ∈ Rn definiujemy
de (x, y) :=
v
u n
uX
t (x
i
− yi )2 ,
i=1
dmax (x, y) := max { |xi − yi | | i = 1, 2, . . . n },
d1 (x, y) :=
n
X
|xi − yi |.
i=1
Twierdzenie 2.1.2
• (Rn , de ), (Rn , dmax ) i (Rn , d1 ) są przestrzeniami metrycznymi.
• de w R2 = C pokrywa się z modułem, a w R z wartością bezwzględną różnicy argumentów.
Metryka de to metryka euklidesowa, metrykę dmax określa się mianem metryka maksimum, a metrykę
d1 mianem metryka Manhattan.
Przykład liczenia odległości w R2 w różnych metrykach przedstawiono na rys. 2.1.
Ćwiczenie 2.1.3 Udowodnić tw. 2.1.2.
23
2.1. PRZESTRZENIE METRYCZNE
Ćwiczenie 2.1.4 Niech X będzie dowolnym zbiorem. Pokazać, że
dd (x, y) :=
0
jeśli x = y,
w przeciwnym razie,
1
jest metryką. Jest to tak zwana metryka dyskretna.
Ćwiczenie 2.1.5 Niech X := [0, 1]N . Dla x, y ∈ X połóżmy
d(x, y) :=
∞
X
|xi − yi |
.
2i
i=1
Pokazać, że d jest metryką. Przestrzeń X z taką metryką nazywana jest kostką Hilberta.
Ćwiczenie 2.1.6 Niech X := {0, 1}Z . Dla x, y ∈ X połóżmy
d(x, y) := |x0 − y0 | +
∞
X
|xi − yi | + |x−i − y−i |
.
2i
i=1
Pokazać, że d jest metryką.
Ćwiczenie 2.1.7 Niech A będzie dowolnym zbiorem, a
X := { f : A → R | f ograniczone }.
Dla f, g ∈ X połóżmy
d(f, g) := sup |f (x) − g(x)|.
x∈X
Pokazać, że d jest metryką.
2.1.3
Kule
Dla ustalonej przestrzeni metrycznej (X, ρ) oraz x ∈ X będziemy używać oznaczenia
24
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
Rysunek 2.2: Umowne przedstawienie różnicy między kulą domknięta, sferą i kulą otwartą.
Ball(x) := Ball(x, X) := Ball(x, X, ρ) := { K(x, r) | r ∈ R+ }.
na rodzinę kul otwartych o środku w x.
Różnica mi˛edzy kula˛ domkni˛eta,˛ a otwarta˛ jest analogiczna do różnicy mi˛edzy przedziałem domkni˛etym, a przedziałem otwartym. Na rysunku można ja˛ przedstawić tylko umownie, na przykład zaznaczajac
˛ sfer˛e ograniczajac
˛ a˛ kul˛e otwarta˛ linia˛ cienka,˛ a sfer˛e
ograniczajac
˛ a˛ kul˛e domkni˛eta˛ linia˛ gruba˛ (rys.2.2).
Przykład kul domkniętych i sfer w R2 w różnych metrykach przedstawiono na rys. 2.3.
2.1.4
Zbiory ograniczone
Niech X będzie przestrzenią metryczną.
Twierdzenie 2.1.8 Jeśli A, B ⊂ X są ograniczone, to A ∪ B jest ograniczone.
Ćwiczenie 2.1.9 Udowodnić tw. 2.1.8.
2.2. ODLEGŁOŚĆ ZBIORÓW I ŚREDNICA ZBIORÓW
25
Rysunek 2.3: Kule w R2 w metryce euklidesowej (zielony), Manhattan (niebieski) i maksimum (czerwony).
Odpowiednie sfery zaznaczono ciemniejszym kolorem.
2.2
2.2.1
Odległość zbiorów i średnica zbiorów
Odległość zbiorów
26
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
2.2.2
Średnica zbioru
Dowód: ćwiczenie.
Ćwiczenie 2.2.1 Pokazać, że jeżeli A ∩ B 6= ∅, to ρ(A ∪ B) ¬ ρ(A) + ρ(B).
2.3
Zbiory otwarte i domknięte, wnętrze, domknięcie i brzeg
zbioru
Poj˛ecia zbioru otwartego i domkni˛etego uogólniaja˛ poj˛ecia kuli otwartej i domkni˛etej. Intuicyjnie zbiór otwarty to taki, który jest rozłaczny
˛
ze swoim brzegiem, a zbiór domkni˛ety to taki, który zawiera swój brzeg. Punkt x jest punktem brzegowym zbioru A jeżeli każdej kula
K ∈ Ball(x) zawiera tak punkty należace
˛ do A jak i nie należace
˛ do A. Ide˛e t˛e przedstawiono na rys. 2.4.
Niech X będzie przestrzenią metryczną niepustą.
Definicja 2.3.1 Mówimy, że A ⊂ X jest otwarty, jeżeli
∀x ∈ A ∃B ∈ Ball(x) B ⊂ A,
co jest równoważne warunkowi
∀x ∈ A ∃r > 0 K(x, r) ⊂ A.
2.3. ZBIORY OTWARTE I DOMKNIĘTE, WNĘTRZE, DOMKNIĘCIE I BRZEG ZBIORU
27
Rysunek 2.4: Poszukiwanie punktów brzegowych (na górze po lewej) zbioru A, brzeg zbioru A (na górze
po prawej), domknięcie zbioru A jako przykład zbioru domkniętego (na dole po lewej) i otwarcie zbioru
A jako przykład zbioru otwartego (na dole po prawej).
Definicja 2.3.2 Mówimy, że A ⊂ X jest domknięty, jeżeli
∀x 6∈ A ∃B ∈ Ball(x) B ∩ A = ∅,
co jest równoważne warunkowi
∀x 6∈ A ∃r > 0 K(x, r) ∩ A = ∅.
2.3.1
Wnętrze, domknięcie i brzeg zbioru
Niech A ⊂ X.
Definicja 2.3.3 Wnętrzem zbioru A nazywamy zbiór
int A := { x ∈ A | ∃B ∈ Ball(x) B ⊂ A }.
Domknięciem zbioru A nazywamy zbiór
cl A := { x ∈ X | ∀B ∈ Ball(x) B ∩ A 6= ∅ }
Brzegiem zbioru A nazywamy zbiór
bd A := { x ∈ X | ∀B ∈ Ball(x) B ∩ A 6= ∅ i B \ A 6= ∅ }.
28
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
Twierdzenie 2.3.4 Niech A ⊂ X. Wtedy
int A = A \ bd A
oraz
cl A = A ∪ bd A.
Ćwiczenie 2.3.5 Udowodnić tw. 2.3.4
Twierdzenie 2.3.6 Niech A ⊂ X. Wtedy
•
int A ⊂ A ⊂ cl A.
• Zbiór A jest otwarty wtedy i tylko wtedy gdy
A = int A.
• Zbiór A jest domknięty wtedy i tylko wtedy gdy
A = cl A.
Ćwiczenie 2.3.7 Udowodnić tw. 2.3.6
Niech X ∈ Metr, x ∈ X, r > 0.
Twierdzenie 2.3.8 Kula otwarta K(x, r) jest zbiorem otwartym, a kula domknięta K̄(x, r)jest
zbiorem domkniętym.
2.3. ZBIORY OTWARTE I DOMKNIĘTE, WNĘTRZE, DOMKNIĘCIE I BRZEG ZBIORU
Definicja 2.3.9 Rodzinę zbiorów otwartych w X oznaczać będziemy Open(X), a zbiorów domkniętych Clos(X).
2.3.2
Własności wnętrza i domknięcia
29
30
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
2.4
2.4.1
Otoczenia, punkty skupienia
Rodzina otoczeń punktu
Definicja 2.4.1 Mówimy, że zbiór A jest otoczeniem punktu x ∈ X jeżeli x ∈ int A. Mówimy, że A
jest otoczeniem otwartym punktu x jeżeli A jest otwarty i x ∈ A. Zbiór otoczeń punktu x oznaczamy
Nb(x), a zbiór otoczeń otwartych punktu x oznaczamy ONb(x).
2.4.2
Punkty skupienia zbioru
Definicja 2.4.2 Punkt x ∈ X nazywamy punktem skupienia zbioru A ⊂ X, jeżeli
∀V ∈ Nb(x) ∃y ∈ X
y 6= x i y ∈ V ∩ A.
Zbiór punktów skupienia zbioru A oznaczamy A0 .
Definicja 2.4.3 Mówimy, że x ∈ X jest punktem izolowanym zbioru A ⊂ X, jeżeli x ∈ A i x nie
jest punktem skupienia zbioru A.
2.5. METRYKI RÓWNOWAŻNE, TOPOLOGIA PRZESTRZENI METRYCZNEJ
31
Dla zbioru
n
A := { n1 | n ∈ N1 } ∪ { n+1
| n ∈ N1 }
jedynymi punktami skupienia są 0 i 1, z czego tylko 1 jest elementem A. Wszystkie pozostałe punkty
zbioru A to jego punkty izolowane.
Ćwiczenie 2.4.4 Pokazać, że w przestrzeni metrycznej z metryką dyskretną wszystkie punkty są
izolowane.
Twierdzenie 2.4.5 Niech A ⊂ X. Wtedy
cl A = A ∪ A0 .
2.5
2.5.1
Metryki równoważne, topologia przestrzeni metrycznej
Fundamentalne własności zbiorów otwartych i domkniętych
32
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
Dowód: ćwiczenie.
Niech ρ1 i ρ2 będą metrykami w X.
Definicja 2.5.1 Mówimy, że metryka ρ2 jest silniejsza od metryki ρ1 jeżeli
Open(X, ρ1 ) ⊂ Open(X, ρ2 ).
2.5. METRYKI RÓWNOWAŻNE, TOPOLOGIA PRZESTRZENI METRYCZNEJ
Uwaga 2.5.2 Metryki ρ1 i ρ2 są równoważne wtedy i tylko wtedy gdy metryka ρ2 jest silniejsza od
metryki ρ1 i metryka ρ1 jest silniejsza od metryki ρ1 .
Definicja 2.5.3 Rodzinę zbiorów otwartych przestrzeni metrycznej nazywamy topologią tej przestrzeni.
Wniosek 2.5.4 Jeśli metryki ρ1 i ρ2 w przestrzeni X są równoważne, to przestrzenie (X, ρ1 ) i (X, ρ1 )
mają identyczne topologie.
Ćwiczenie 2.5.5 Udowodnić, że w przestrzeni metrycznej (X, ρ) metrykę ρ można zastąpić metryką
równoważną, która jest ograniczona.
Ćwiczenie 2.5.6 Podać przykład przestrzeni metrycznej X oraz punktu x ∈ X i r > 0 takich, że
cl K(x, r) 6= K̄(X, r).
2.5.2
Normy równoważne
33
34
ROZDZIAŁ 2. PRZESTRZENIE METRYCZNE
Twierdzenie 2.5.7 Metryki euklidesowa, maksimum i Manhattan w Rd są wzajemnie równoważne.
Ćwiczenie 2.5.8 Udowodnić tw. 2.5.7
Rozdział 3
Przestrzenie topologiczne
3.1
3.1.1
Podstawowe pojęcia.
Definicja przestrzeni topologicznej.
Zamiast zadawać metrykę, by otrzymać topologię, możemy przyjąć, że zadana jest rodzina O, która ma
trzy fundamentalne własności jakie mają zbiory otwarte w przestrzeni metrycznej.
Oczywiście topologia przestrzeni metrycznej (X, ρ), czyli rodzina zbiorów otwartych zadanych przez metrykę ρ jest topologią w sensie powyższej definicji. Nazywamy ją topologią zadaną przez metrykę ρ.
Klasę przestrzeni topologicznych oznaczać będziemy Top.
3.1.2
Baza otoczeń punktu.
Definicja 3.1.1 Niech (X, O) będzie przestrzenią topologiczną i niech x ∈ X. Zbiór V ⊂ X nazywamy otoczeniem otwartym punktu x jeżeli x ∈ V ∈ O. Wprowadzamy też oznaczenia
ONb(x) := { V ∈ O | x ∈ V },
Nb(x) := { A ⊂ X | ∃V ∈ ONb(x) V ⊂ A },
Open(X, O) := Open(X) := { A ⊂ X | ∀x ∈ A ∃V ∈ ONb(x) V ⊂ A }.
35
36
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Rysunek 3.1: Rozdzielenie punktów kulami w przestrzeni metrycznej.
Zastępując w definicjach brzegu, otwarcia i domknięcia zbioru, zbioru otwartego i domkniętego oraz
punktu skupienia zbioru w przestrzeni metrycznej rodzinę Ball(x) rodziną ONb(x) otrzymujemy odpowiedniki tych pojęć w przestrzeni topologicznej i wiele własności tych pojęć daje się przenieść do przestrzeni topologicznej. W szczególności, zgodnie z oczekiwaniami widzimy, że rodzina zbiorów otwartych w
przestrzeni topologicznej (X, O) pokrywa się z rodziną O, jak pokazuje następujące twierdzenie.
3.1.3
Aksjomat Hausdorffa
Definicja 3.1.2 (Aksjomat Hausdorffa) Niech (X, O) będzie przestrzenią topologiczną. Mówimy, że
przestrzeń ta spełnia aksjomat Hausdorffa jeżeli dla każdej pary punktów x, y ∈ X istnieją otoczenia
U ∈ ONb(x), V ∈ ONb(y) takie, że U ∩ V = ∅. Mówimy, że (X, O) jest przestrzenią topologiczną Hausdorffa lub krócej T2 -przestrzenią jeżeli spełnia ona aksjomat Hausdorffa. Klasę przestrzeni
topologicznych Hausdorffa oznaczać będziemy HTop.
Twierdzenie 3.1.3 W przestrzeni metrycznej aksjomat Hausdorffa jest spełniony.
Dowód: ćwiczenie.
Ideę dowodu ilustruje rys. 3.1.
Klasę przestrzeni topologicznych spełniających aksjomat Hausdorffa oznaczać będziemy HTop.
3.1. PODSTAWOWE POJĘCIA.
3.1.4
37
Przestrzenie metryzowalne.
Niech (X, O) będzie przestrzenią topologiczną.
Definicja 3.1.4 Niech ρ będzie metryką w przestrzeni X. Mówimy, że ρ jest zgodna z topologią O
jeżeli Open(X, ρ) = O. O topologii O mówimy wtedy, że jest indukowana przez pewną metrykę.
Ćwiczenie 3.1.5 Pokazać, że ta sama topologia może być indukowana przez dwie różne metryki.
Definicja 3.1.6 Mówimy, że (X, O) jest przestrzenią metryzowalną, jeżeli jej topologia jest indukowana przez pewną metrykę.
Ćwiczenie 3.1.7 Niech X będzie zbiorem nieskończonym. Pokazać że rodzina
O := { A ⊂ X | X \ A jest skończony } ∪ {∅}
definiuje topologię na X, która nie spełnia aksjomatu Hausdorffa. W szczególności nie istnieje metryka na X, której topologia pokrywałaby się z O, a więc (X, O) nie jest przestrzenią topologiczną
metryzowalną.
Metryka jest jedynie pomocniczym narz˛edziem do badania przestrzeni topologicznych. W przestrzeniach, które nie sa˛ metryzowalne
narz˛edzie to nie jest dost˛epne. Jak zobaczymy sa˛ przestrzenie topologiczne metryzowalne, których badanie przy pomocy metrki nie
jest dogodne. Co wi˛ecej, nawet jeśli korzystamy z metryki przy badaniu przestrzeni topologicznej, to czasami zmieniamy t˛e metryk˛e z
jednej indukujacej
˛ dana˛ topologi˛e na inna˛ indukujac
˛ a˛ t˛e sama˛ topologi˛e, w zależności od rozważanego problemu.
3.1.5
Baza topologii
38
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Twierdzenie 3.1.8 W przestrzeni metrycznej (X, ρ) rodzina kul
B := { K(x, n1 ) | x ∈ X, n ∈ N1 }
stanowi bazę topologii zadanej przez metrykę ρ.
Ćwiczenie 3.1.9 Udowodnić tw. 3.1.8.
3.2
Granica funkcji
Niech f : X → Y będzie odwzorowaniem przestrzeni topologicznych.
39
3.3. CIĄGŁOŚĆ FUNKCJI
Definicja 3.2.1 Mówimy, że f ma granicę ȳ ∈ Y w punkcie x0 ∈ X i piszemy
lim f (x) = ȳ
x→x0
jeżeli dla każdego otoczenia V ∈ Nb(ȳ) istnieje otoczenie U ∈ Nb(x0 ) takie, że
x ∈ U \ {x0 } ⇒ f (x) ∈ V.
3.3
3.3.1
Ciągłość funkcji
Ciągłość funkcji
Niech f : X → Y będzie odwzorowaniem przestrzeni topologicznych.
Definicja 3.3.1 Mówimy, że f jest ciągła w punkcie x0 ∈ X jeżeli dla każdego otoczenia V ∈
Nb(f (x0 )) istnieje otoczenie U ∈ Nb(x0 ) takie, że
x ∈ U ⇒ f (x) ∈ V.
Mówimy, że f jest ciągła jeśli jest ciągła w każdym punkcie x ∈ X.
Twierdzenie 3.3.2 Funkcja f jest ciągła w x0 wtedy i tylko wtedy gdy zachodzi jeden z następujących
dwóch warunków
x0 6∈ X 0 lub x0 ∈ X 0 i x→x
lim f (x) = f (x0 ).
0
Dowód:
40
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Twierdzenie 3.3.3 Niech B 1 będzie bazą otoczeń x0 , a B 2 bazą otoczeń f (x0 ). Wtedy ciągłość f :
X → Y w x0 jest równoważna każdemu z trzech poniższych warunków
∀V ∈ B 2 ∃U ∈ B 1 f (U ) ⊂ V,
∀V ∈ B 2 ∃U ∈ B 1 U ⊂ f −1 (V ),
∀V ∈ B 2 f −1 (V ) ∈ Nb(x0 ).
Dowód:
3.3.2
Kryteria ciągłości
Twierdzenie 3.3.4 Funkcja f : X → Y jest ciągła wtedy i tylko wtedy gdy dla każdego zbioru
otwartego V w Y zbiór f −1 (V ) jest otwarty w X.
Dowód:
Twierdzenie 3.3.5 Funkcja f : X → Y jest ciągła wtedy i tylko wtedy gdy dla każdego zbioru
domkniętego K w Y zbiór f −1 (K) jest domknięty w X.
Dowód: ćwiczenie.
3.3.3
Ciągłość złożenia
Twierdzenie 3.3.6 Niech X, Y, Z będą przestrzeniami topologicznymi, a f : X → Y i g : Y → Z
odwzorowaniami. Jeśli f jest ciągłe w x0 ∈ X, a g jest ciągłe w f (x0 ), to g ◦ f jest ciągłe w x0 .
Zatem jeśli f i g są ciągłe, to g ◦ f jest ciągłe.
Dowód: łatwe ćwiczenie.
41
3.3. CIĄGŁOŚĆ FUNKCJI
3.3.4
Ciągłość operacji arytmetycznych
Niech X będzie przestrzenią topologiczną, a Y niech będzie ciałem liczb rzeczywistych lub ciałem liczb
zespolonych.
Twierdzenie 3.3.7 Jeśli f, g : X → Y są ciągłe w x0 ∈ X to f + g, f − g, f · g są ciągłe w x0 . Jeśli
dodatkowo g(x0 ) 6= 0, to f /g jest ciągłe w x0 .
Dowód: łatwe ćwiczenie.
3.3.5
Przykłady odwzorowań ciągłych.
Twierdzenie 3.3.8 Niech X, Y ∈ Top.
(i) Niech c ∈ Y . Funkcja stała cX : X 3 x 7→ c ∈ Y jest ciągła.
(ii) Niech X ⊂ Y . Inkluzja j : X 3 x 7→ x ∈ Y jest ciągła.
(iii) Identyczność idX : X 3 x 7→ x ∈ X jest ciągła.
(iv) Odwzorowania rzutowania
pX : X × Y 3 (x, y) 7→ x ∈ X
qX : X × Y 3 (x, y) 7→ y ∈ Y
są ciągłe.
(v) Zawężenie f|A odwzorowania ciągłego f : X → Y do zbioru A ⊂ X jest ciągłe.
Dowód: łatwe ćwiczenie.
Twierdzenie 3.3.9 Niech P : C → C będzie wielomianem. Wtedy P jest ciągłe.
Dowód: łatwe ćwiczenie.
Niech P, Q : C → C będą wielomianami. Funkcją wymierną jest funkcja
P
P (x)
: C \ Q−1 (0) 3 x 7→
∈ C.
Q
Q(x)
Twierdzenie 3.3.10 Funkcja wymierna jest ciągła.
Dowód: łatwe ćwiczenie.
42
3.4
3.4.1
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Topologia porządkowa, indukowana, produktowa i ilorazowa
Topologia porządkowa
3.4. TOPOLOGIA PORZĄDKOWA, INDUKOWANA, PRODUKTOWA I ILORAZOWA
43
Jednym z głównych pożytków z topologii porzadkowej
˛
to zadanie topologii w R̄.
Ćwiczenie 3.4.1 Pokazać, że R̄ z topologią porządkową jest przestrzenią metryzowalną.
3.4.2
Topologia indukowana
Topologia indukowana czyni z dowolnego podzbioru przestrzeni topologicznej, w szczególności z dowolnego podzbioru Rd przestrzeń topologiczną. Daje to mechanizm produkowania przestrzeni topologicznych o
bardzo różnych własnościach.
3.4.3
Topologia produktowa
Powyższą topologię nazywamy topologią produktową lub topologią iloczynu kartezjańskiego.
Twierdzenie 3.4.2 Topologia produktowa w Rd jako ilocznie kartezjańskim d kopii R pokrywa się z
topologią zadaną metryką euklidesową w Rd (i oczywiście metrykami jej równoważnymi).
44
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
3.4.4
Topologia ilorazowa
Twierdzenie 3.4.3 Niech (X, O) będzie przestrzenią topologiczną, R relacją równoważności w X, a
p : X 3 x 7→ [x]R ∈ X/R
kanoniczną surjekcją. Wtedy
O0 := { U ⊂ X/R | p−1 (U ) ∈ O }.
jest topologią w X/R. Nazywamy ją topologią ilorazową.
Dowód: Oczywiście p−1 (∅) = ∅ ∈ O, a ponieważ p jest surjekcją, również p−1 (X/R) = X ∈ O, bo O
jest topologią. Zatem ∅, Y ∈ O0 , czyli O0 spełnia warunek T1) w definicji topologii. Ponieważ przeciwobraz
sumy mnogościowej jest sumą przeciwobrazów, a przeciwobraz przecięcia mnogościowego jest przecięciem
przeciwobrazów, w podobny sposób sprawdzamy również warunki T2) i T3).
Przykład 3.4.4 Rozważmy X = [0, 1] oraz
R = { (x, y) ∈ X 2 | x = y lub x, y ∈ {0, 1} }.
Łatwo sprawdzić, że R jest relacją równoważności w X. Mamy więc topologię ilorazową w X/R.
Obrazowo możemy stwierdzić, że relacja R skleja punkty 0 i 1 pozostałe punkty pozostawiajac
˛ nietkni˛ete. Zatem łatwo odgadnać,
˛
że topologia ilorazowa w tym przypadku powinna pokrywać si˛e z topologia˛ okr˛egu.
Ćwiczenie 3.4.5 Pokazać, że topologia ilorazowa z przykładu 3.4.4 jest topologią okręgu.
Czasami zamiast relacji równoważności wygodniej rozważać rozbicie przestrzeni. Mówimy, że rodzina
A podzbiorów zbioru X jest jego rozbiciem, jeżeli zachodzą następujące dwa warunki:
• ∀ A1 , A2 ∈ A A1 ∩ A2 6= ∅ ⇔ A1 = A2
• X=
S
A∈A
A.
Łatwo sprawdzić, że jeżeli A jest rozbiciem X, to
RA := { (x, y) | ∃A ∈ A x, y ∈ A }
3.4. TOPOLOGIA PORZĄDKOWA, INDUKOWANA, PRODUKTOWA I ILORAZOWA
45
jest relacją równoważności w X. Podobnie, jeśli R jest relacją równoważności w X, to
AR := { [x]R | x ∈ X }
jest rozbiciem X. Ponadto operacje brania rozbicia AR relacji równoważności R i relacji równoważności
RA dla rozbicia A są operacjami wzajemnie odwrotnymi. Zatem każde rozbicie A przestrzeni topologicznej
X ma naturalną topologię ilorazową zadaną przez relację równoważności RA .
Ideę topologii ilorazowej rozszerza się też na przypadek gdy dana jest surjekcja p : X → A przestrzeni
topologicznej X na pewien zbiór bez topologii Y . Łatwo bowiem sprawdzić, że jeśli p jest surjekcją, a
Ap := { p−1 (y) | y ∈ Y }
to Ap jest rozbiciem X, a odwzorowanie
Ap 3 [x]RAp 7→ p(x) ∈ Y
jest bijekcją, która przenosi topologię ilorazową w X/RAp na Y .
Przykład 3.4.6 Niech I = [0, 1] oraz X = I × I. Rozważmy rodzinę
T := { {(x, y)} | x, y ∈ X \ {0, 1} }∪{ {(0, y), (1, y)} | y ∈ I \ {0, 1} }∪{ {(x, 0), (x, 1)} | x ∈ I \ {0, 1} }∪{(0, 0)
Łatwo sprawdzić, że rodzina ta jest rozbiciem, a związana z tym rozbiciem relacja równoważności
utożsamia naprzeciwległe pary punktów na bokach kwadratu. Sklejajac
˛ naprzeciwległe punkty dolnego i górnego boku kwadratu otrzymujemy rur˛e z dwoma okr˛egami na końcach powstałymi ze sklejenia końców lewego i prawego boku
kwadratu. Sklejajac
˛ naprzeciwległe punkty na tych okr˛egach dostajemy torus, czyli coś na kształt d˛etki, albo powierzchni amerykańskiego paczka
˛
zwanego donut. Jest to przestrzeń topologiczna homeomorficzna z S 1 × S 1 . Torusem jest w szczególności
podzbiór R3 otrzymany przez obrót okr˛egu
{ (x, y, z) ∈ R3 | (x − 2)2 + z 2 = 1, y = 0 }
wokół osi z .
Ćwiczenie 3.4.7 Pokazać, że topologia ilorazowa z przykładu 3.4.6 pokrywa się z topologią iloczynu
kartezjańskiego dwóch okręgów.
46
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Rysunek 3.2: Wizualizacja butelki Kleina w R3 (źródło: Wikipedia)
Przykład 3.4.8 Jak w poprzednim przykładzie, niech I = [0, 1] oraz X = I × I. Rozważmy jednak
inne rozbicie:
K := { {(x, y)} | x, y 6∈ {0, 1} } ∪ { {(0, y), (1, 1 − y)} | y ∈ I } ∪ { {(x, 0), (x, 1)} | y ∈ I }
Drobna zmiana jaką wprowadziliśmy to utożsamienie punktu (0, y) z punktem (1, 1 − y) zamiast z
punktem (1, y). Pierwszy krok budowy przestrzeni ilorazowej przebiega podobnie jak w poprzednim
przykładzie: sklejając dolny i górny bok kwadratru otrzymujemy rurę. Jednak przy sklejaniu końców
rury dokonujemy symetrycznego odbicia względem osi {x = 21 }. Wynikową przestrzeń i przestrzenie
z nią homeomorficzne określa się mianem butelka Kleina. Butelka Kleina nie jest niestety homeomorficzna z żadnym podzbiorem R3 , więc by ją sobie w R3 wyobrazić musimy dokonać samoprzecięcia,
które nie jest potrzebne w R4 (patrz rys. 3.2).
Przykład 3.4.9 Symetrycznego odbicia możemy też dokonać przy sklejaniu dolnego i górnego boku,
rozważająć rozbicie
P := { {(x, y)} | x, y 6∈ {0, 1} } ∪ { {(0, y), (1, 1 − y)} | y ∈ I } ∪ { {(x, 0), (1 − x, 1)} | y ∈ I }
Przestrzeń ilorazową i przestrzenie z nią homeomorficzne określane są jako dwuwymiarowa rzeczywista przestrzeń rzutowa. Zobrazowanie jej w R3 nie jest możliwe bez samoprzecięć, a nawet z samoprzecięciami nie jest łatwe. Przestrzeń rzutową da się zanurzyć w R4 , choć nie jest oczywiste jak to
zrobić. Łatwiej jest ją zanurzyć w R5 .
3.5. AKSJOMAT PRZELICZALNOŚCI
3.5
3.5.1
47
Aksjomat przeliczalności
Baza otoczeń punktu.
Definicja 3.5.1 Dla punktu x ∈ X rodzinę B ⊂ Nb(x) nazywamy bazą otoczeń punktu x jeżeli dla
każdego otoczenia V ∈ Nb(x) istnieje otoczenie B ∈ B takie, że B ⊂ V .
Dowód: ćwiczenie.
3.5.2
Aksjomat przeliczalności
Topologie przestrzeni metrycznych mają jeszcze jedną cechę, której nie da się wywnioskować z aksjomatów
przestrzeni topologicznej. Mianowicie rodzina { K(x, n1 | n ∈ N1 } jest przeliczalną bazą otoczeń punktu
x.
Klasę przestrzeni topologicznych spełniających pierwszy aksjomat przeliczalności oznaczać będziemy
PTop, a przecięcie klas HTop i PTop oznaczać będziemy PHTop.
Aksjomat przeliczalności pozwala nam wiele własności przestrzeni metrycznych wyrazić w języku ciągów, co jest bardzo wygodne.
48
3.5.3
ROZDZIAŁ 3. PRZESTRZENIE TOPOLOGICZNE
Charakteryzacje ciągowe
Rozdział 4
Zwartość, spójność i zupełność
4.1
4.1.1
Zwartość
Przyczyny braku zbieżności.
Przyczyny braku zbieżności moga˛ być różne. Ciag
˛
1
+ (−1)n → R
n
nie jest zbieżny, bo nie może si˛e zdecydować czy zbiegać do 1 czy do −1. Inaczej: można z niego wybrać podciagi
˛ zbieżne do
a : N1 3 n 7→
dwóch różnych granic. Z kolei ciag
˛
a : N1 3 n 7→ 2n → R,
w ogóle nie posiada podciagu
˛ zbieżnego. Ale temu można zaradzić zmieniajac
˛ przestrzeń R na R̄. Wtedy ten ciag
˛ staje si˛e zbieżny
do +∞. Można pokazać, że w R̄ każdy ciag
˛ posiada podciag
˛ zbieżny. Przestrzenie topologiczne, które maja˛ taka˛ własność sa˛ z wielu
powodów mile widziane. W przypadku X ⊂ Rn potraktowanego jako podprzestrzeń każdy ciag
˛ o wartościach w A posiada podciag
˛
zbieżny wtedy i tylko wtedy gdy A jest domkni˛ety i ograniczony w X .
Domkni˛ete i ograniczone podzbiory w Rn maja˛ też inne przydatne własności. Rysunek 4.1 pokazuje, że należy oczekiwać iż funkcja
ciagła
˛ f na domkni˛etym i ograniczonym podzbiorze Rn jest ograniczona.
Rysunek 4.2 z kolei pokazuje, że założenie iż zbiór jest domkni˛ety jest istotne.
Co wi˛ecej, sama domkni˛etość przedziału nie wystarcza. Przedział [0, ∞), też jest domkni˛ety, ale funkcja
[0, ∞) 3 x 7→ x2 ∈ R
jest nieograniczona. Zatem istotne jest, by rozważać przedział domkni˛ety i ograniczony. Rozważania te sugeruja,˛ że prawdziwe
powinno być nast˛epujace
˛ twierdzenie (formułujemy je dla najprostszego przypadku).
Twierdzenie 4.1.1 Niech f : [a, b] → R b˛edzie funkcja˛ ciagł
˛ a.˛ Wtedy f jest funkcja˛ ograniczona.˛
49
50
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Rysunek 4.1: Funkcja ciągła na zbiorze domkniętym i ograniczonym jest ograniczona
Rysunek 4.2: Funkcja ciągła na przedziale otwartym (a, b) nie musi być ograniczona
51
4.1. ZWARTOŚĆ
Potencjalny dowód mógłby przebiegać tak: Do y ∈ im f dobieram x ∈ [a, b] takie, że f (x) = y oraz Vx ∈ ONb(x) takie,
że
u ∈ Vx ⇒ f (u) ∈ [y − 1, y + 1].
Mamy
[a, b] ⊂
[
{ Vx | x ∈ [a, b] }.
Mówimy, że rodzina zbiorów { Vx | x ∈ [a, b] } stanowi pokrycie otawrte przedziału [a, b]. Gdyby było możliwe zastapienie
˛
tego
pokrycia podpokryciem skończonym, to znaczy wybranie skończonej ilości punktów x1 , x2 , . . . xk ∈ [a, b], tak, by
[a, b] ⊂
k
[
Vxi ,
i=1
to otrzymalibyśmy
f ([a, b]) ⊂
k
[
[f (xi ) − 1, f (xi ) + 1]
i=1
a stad
˛ f ([a, b]) ⊂ [c, d], gdzie
c := min { f (xi ) − 1 | i = 1, 2, . . . k } d := max { f (xi ) + 1 | i = 1, 2, . . . k }
i dowód byłby zakończony. Okazuje si˛e, że jedynymi podzbiorami w Rn , które maja˛ własność istnienia podpokrycia skończonego
dla dowolnego pokrycia otwartego sa˛ zbiory domkni˛ete i ograniczone. Niestety nie jest to prawda˛ w dowolnej przestrzeni metrycznej.
Ponieważ pomysł polegajacy
˛ na wybraniu z nieskończonego pokrycia zbioru pewnego podpokrycia skończonego przydaje si˛e w wielu
dowodach, dlatego warto wyróżnić klas˛e zbiorów majacych
˛
taka˛ własność. Zbiory takie nazywane sa˛ zbiorami zwartymi.
Co wi˛ecej, okazuje si˛e, że zwartość zbioru nie zależy od topologii przestrzeni, w której zbiór jest zanurzony, a tylko od topologii
indukowanej w zbiorze. Dlatego mówimy też o przestrzeniach zwartych.
4.1.2
Przestrzenie zwarte
Niech X ∈ HTop i A ⊂ X.
Definicja 4.1.2 Mówimy, że zbiór A jest zwarty jeżeli dla każdej rodziny C ⊂ Open(X) takiej, że
S
S
A ⊂ C istnieje skończona podrodzina C 0 ⊂ C taka, że A ⊂ C 0 .
Definicja 4.1.3 Mówimy„ że przestrzeń topologiczna X jest zwarta, jeżeli X traktowane jako zbiór
w przestrzeni X jest zbiorem zwartym.
Definicja 4.1.4 Klasę przestrzeni zwartych oznaczać będziemy Comp.
52
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
53
4.1. ZWARTOŚĆ
4.1.3
Charakterystyka zbiorów zwartych w Rn .
Lemat 4.1.5 Niech In będzie ciągiem przedziałów w R takim, że In+1 ⊂ In . Wtedy
∞
\
In 6= ∅.
n=1
Definicja 4.1.6 Kostką w Rd nazywamy iloczyn kartezjański d przedziałów domkniętych.
Twierdzenie 4.1.7 Niech Kn będzie ciągiem przedziałów w Rd takim, że Kn+1 ⊂ Kn . Wtedy
∞
\
Kn 6= ∅.
n=1
Dowód: ćwiczenie.
Twierdzenie 4.1.8 Każda kostka w Rd jest zbiorem zwartym.
54
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
55
4.1. ZWARTOŚĆ
Lemat 4.1.9 Niech X ∈ Top, a Y ∈ Comp. Jeśli U ∈ Open(X × Y ), to
UX := { x ∈ X | {x} × Y ⊂ U } ∈ Open(X).
Dowód: Z definicji topologii produktowej wiemy, że zbiór U ma postać
UX =
[
G(x,y) × H(x,y) ,
(x,y)∈U
gdzie G(x,y) ∈ Open(X), H(x,y) ∈ Open(Y ). Ustalmy x0 ∈ UX . Rodzina
{ H(x0 ,y) | y ∈ Y }
stanowi pokrycie otwarte zbioru Y . Ponieważ Y jest zwarty, znajdziemy punkty y1 , y2 , . . . , yn takie, że
Y =
n
[
H(x0 ,yi ) .
i=1
Połóżmy
G :=
n
\
G(x0 ,yi ) .
i=1
Oczywiście G ∈ Open(X). Co więcej, mamy
G×Y =
n
\
i=1
G(x0 ,yi ) ×
n
[
H(x0 ,yi ) ⊂
i=1
n
[
G(x0 ,yi ) × H(x0 ,yi ) ⊂ U.
i=1
Zatem G ⊂ UX , co oznacza, że UX jest otwarty.
Twierdzenie 4.1.10 Niech X1 , X2 ∈ Comp. Wtedy X1 × X2 ∈ Comp.
Dowód: Niech C będzie pokryciem otwartym przestrzeni X1 ×X2 . Zatem dla każdej pary x = (x1 , x2 ) ∈
X1 × X2 znajdziemy zbiór Cx ∈ C taki, że x ∈ Cx . Z definicji topologii produktowej możemy dobrać zbiory
Gx ∈ Open(X1 ) oraz Hx ∈ Open(X2 ) takie, że x1 ∈ Gx , x2 ∈ Hx . Wystarczy pokazać, że pokrycie otwarte
H := { Gx × Hx | x ∈ X1 × X2 }
56
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
przestrzeni X1 × X2 ma podpokrycie skończone. Rozważmy rodzinę
Q := { Q ∈ Open(X1 ) | ∃x1 , x2 , . . . xn ∈ X1 × X2
Q × X2 ⊂
Sn
i=1
Gxi × Hxi }.
Pokażemy, że X1 ⊂ Q. W tym celu rozważmy t ∈ X1 . Zbiór {t} × X2 jest zwarty jako homeomorficzny
obraz zbioru zwartego X2 . Zatem zawiera się on w pewnym skończonym podpokryciu pokrycia C
S
{t} × X2 ⊂ U :=
m
[
Gti × Hti
i=1
dla pewnych par ti ∈ X1 × X2 . Zbiór U jest otwarty jako suma zbiorów otwartych, zatem, na mocy
lematu 4.1.9 zbiór UX jest otwarty. Oczywiście t ∈ UX . Co więcej, łatwo sprawdzić, że UX ∈ Q, co dowodzi,
że Q jest pokryciem otwartym zbioru X1 . Ponieważ X1 też jest zwarty, więc znajedziemy Q1 , Q2 , . . . Qk ∈
S
Q, takie, że X1 = kj=1 Qj . Z definicji Q mamy
Qj × X2 ⊂
nj
[
Gxi,j × Hxi,j
i=1
dla pewnych x
i,j
∈ X1 × X2 . W rezultacie dostajemy
X 1 × X2 =
k
[
j=1
Qj × X2 ⊂
nj
k [
[
Gxi,j × Hxi,j .
j=1 i=1
Zatem pokrycie H ma podpokrycie skończone, co dowodzi, że X × Y jest zwarty.
4.1.4
Liczba Lebesque’a
Lemat 4.1.11 (Lebesgue). Niech U będzie pokryciem otwartym przestrzeni metrycznej zwartej X.
Wtedy istnieje > 0 takie, że dla każdego podzbioru A ⊂ X o średnicy mniejszej niż istnieje U ∈ U
takie, że A ⊂ U . Liczbę o takiej własności nazywa się liczbą Lebesgue’a pokrycia U.
Ćwiczenie 4.1.12 Udowodnić lemat 4.1.11 wykorzystując następujący schemat dowodu:
1. Niech U1 , U2 , . . . Un będzie podpokryciem skończonym U i niech
f : X 3 x 7→ max { d(x, X \ Ui | i = 1, 2, . . . n }.
2. Funkcja f jest ciągła i przyjmuje wyłącznie wartości dodatnie.
3. f (X) jest zwartym podzbiorem R, zatem istnieje > 0. takie, że f (x) > .
4. Dla każdego x ∈ X istnieje i takie, że d(x, X \ Ui ) > , czyli K̄(x, ) ⊂ Ui .
5. Każdy zbiór o średnicy mniejszej niż zawiera się w pewnej kuli o średnicy mniejszej niż .
4.2. CIĄGŁOŚĆ, A ZWARTOŚĆ
4.1.5
Przestrzenie lokalnie zwarte
Definicja 4.1.13 Mówimy, że przestrzeń topologiczna X jest lokalnie zwarta, jeżeli każdy punkt tej
przestrzeni posiada bazę otoczeń zwartych.
Twierdzenie 4.1.14 Przestrzenie R oraz R̄ są lokalnie zwarte.
Dowód: ćwiczenie.
Twierdzenie 4.1.15 Iloczyn kartezjański przestrzeni lokalnie zwartych jest lokalnie zwarty.
Dowód: ćwiczenie.
Ćwiczenie 4.1.16 Podać przykład podprzestrzeni przestrzeni R2 , która
• nie jest zwarta, ale jest lokalnie zwarta
• nie jest ani zwarta, ani lokalnie zwarta
4.2
4.2.1
Ciągłość, a zwartość
Obraz zbioru zwartego przez odwzorowanie ciągłe.
Ustalmy X, Y ∈ PHTop oraz funkcję f : X → Y .
Twierdzenie 4.2.1 Jeśli f jest ciągła, a A ⊂ X jest zwarty, to f (A) jest zwarty.
Dowód:
57
58
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Rysunek 4.3: Funkcja ciągła na przedziale zwartym osiąga swoje kresy
4.2.2
Funkcja ciągła na zbiorze zwartym o wartościach w R osiąga swoje
kresy
Dowód:
4.2.3
Funkcja odwrotna do funkcji ciągłej
4.2. CIĄGŁOŚĆ, A ZWARTOŚĆ
Dowód:
4.2.4
Dowód:
Jednostajna ciągłość
59
60
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Rysunek 4.4: Funkcja jednostajnie ciągła, która nie jest funkcją Lipschitza
4.2.5
Funkcje Lipschitza
61
4.3. SPÓJNOŚĆ
4.3
4.3.1
Spójność
Przestrzenie spójne
Niech X ∈ PHTop.
Definicja 4.3.1 Mówimy, że zbiór E ⊂ X jest niespójny, jeżeli istnieją rozłączne zbiory A, B ∈
Open(X) takie, że A ∩ E 6= ∅ 6= B ∩ E oraz E ⊂ A ∪ B. Jeśli takie zbiory nie istnieją, mówimy, że
E jest spójny.
Twierdzenie 4.3.2 Niech {Aλ }λ∈Λ będzie rodziną spójnych podzbiorów przestrzeni topologicznej X.
Wtedy
\
[
Aλ 6= ∅ ⇒
Aλ jest zbiorem spójnym.
λ∈Λ
λ∈Λ
62
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Twierdzenie 4.3.3 Jeśli A1 , A2 , . . . An są zbiorami spójnymi oraz Ai ∩Ai+1 6= ∅ dla i = 1, 2, . . . n−1,
S
to ni=1 Ai jest zbiorem spójnym.
Lemat 4.3.4 Załóżmy, że Y ⊂ X jest podprzestrzenią spójną. Jeśli A, B ∈ Open(X), A ∩ B = ∅ i
Y ⊂ A ∪ B, to Y ⊂ A lub Y ⊂ B.
Dowód: Zauważmy, że A0 := A ∩ Y oraz B 0 := B ∩ Y są zbiorami otwartymi w Y , są rozłączne oraz
Y = A0 ∪ B 0 . Zatem A0 = ∅ lub B 0 = ∅, co dowodzi tezy.
Lemat 4.3.5 Jeśli A ⊂ X jest podzbiorem spójnym, a B spełnia warunek A ⊂ B ⊂ cl A, to B jest
zbiorem spójnym. W szczególności domknięcie zbioru spójnego jest zbiorem spójnym.
Dowód: Niech B = C ∪ D będzie rozkładem B na zbiory niepuste, rozłączne i otwarte w B. Na mocy
lematu 4.3.4 albo A ⊂ C albo A ⊂ D. Dla ustalenia uwagi przyjmijmy, że A ⊂ C. Wtedy
cl A ⊂ cl C ⊂ cl B ∩ cl(X \ D),
bo uzupełnienie D, otwartego w B, do B jest zbiorem domkniętym w B. Zatem
B = B ∩ cl A ⊂ B ∩ (X \ D) = B \ D,
skąd wnosimy, że B ⊂ C. Zatem B jest spójny.
4.3.2
Składowe spójne
Definicja 4.3.6 Składową spójną punktu x ∈ X nazywamy sumę mnogościową wszystkich podzbiorów spójnych przestrzeni X, do których punkt x należy.
4.3. SPÓJNOŚĆ
63
Twierdzenie 4.3.7 Mamy następujące własności składowych spójnych.
(i) Składowe spójne przestrzeni X są zbiorami spójnymi i domkniętymi.
(ii) Punkty x, y ∈ X należą do tej samej sładowej wtedy i tylko wtedy gdy istnieje podzbiór spójny
E ⊂ X taki, że x, y ∈ E.
(iii) Dwie składowe są albo rozłącznie, albo równe, zatem zbiór składowych przestrzeni X tworzy
rozbicie tej przestrzeni.
Dowód: Własność (i) wynika natychmiast z tw. 4.3.2 i lematu 4.3.5. Własność (ii) wynika wprost z
definicji składowej spójnej. Aby udowodnić własność (iii) przyjmijmy, że E oraz F są składowymi spójnymi
odpowiednio punktu x i y oraz E ∩F 6= ∅. Z tw. 4.3.2 wynika, że E ∪F jest spójny. Ponieważ x, y ∈ E ∪F ,
z definicji składowej spójnej dostajemy, że E ∪ F ⊂ E i E ∪ F ⊂ F , a stąd, że E = E ∪ F = F .
4.3.3
Ciągłość, a spójność
4.3.4
Obraz zbioru spójnego przez odwzorowanie ciągłe.
Dowód:
64
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Rysunek 4.5: Własność Darboux.
4.3.5
4.4
Własność Darboux.
Zupełność
4.4.1
Dowód:
Warunek Cauchy’ego
4.4. ZUPEŁNOŚĆ
Dowód:
Dowód:
Dowód:
4.4.2
Przestrzenie zupełne
65
66
ROZDZIAŁ 4. ZWARTOŚĆ, SPÓJNOŚĆ I ZUPEŁNOŚĆ
Rozdział 5
Wielościany.
5.1
5.1.1
Kompleksy symplicjalne.
Wypukłość.
Definicja 5.1.1 Zbiór K ⊂ Rd jest wypukły jeżeli dla dowolnych dwóch punktów x, y ∈ K odcinek
[x, y] := {λx + (1 − λ)y | 0 ¬ λ ¬ 1}
łączący x z y jest zawarty w K.
Definicja 5.1.2 Obwiednią wypukłą conv A zbioru A ⊂ Rd nazywamy przecięcie wszystkich domkniętych, wypukłych zbiorów zawierających A.
Uwaga 5.1.3 Dla dowolnego zbioru A ⊂ Rd jego obwiednia wypukła jest zbiorem wypukłym domkniętym oraz
A ⊂ conv A.
Dowód: ćwiczenie.
Intuicja podpowiada nam, że obwiednia˛ wypukła˛ dwóch punktów jest odcinek je łacz
˛ acy,
˛ obwiednia˛ wypukła˛ trzech niewspółliniowych punktów jest trójkat˛ o wierzchołkach w tych punktach, obwiednia˛ wypukła˛ czterech niewspółpłaszczyznowych punktó jest
czworościan o wierzchołkach w tych punktach.
67
68
ROZDZIAŁ 5. WIELOŚCIANY.
5.1.2
Współrzędne barycentryczne.
Twierdzenie 5.1.4 Niech V = {v0 , v1 , . . . , vn } ⊂ Rd będzie skończonym zbiorem. Wtedy conv V jest
zbiorem takich x ∈ Rd , które można zapisać w postaci
x=
X
v∈V
λv v, 0 ¬ λv ¬ 1,
X
λv = 1.
(5.1)
v∈V
Generalnie, współczynniki λv nie są wyznaczone jednoznacznie. Na przykład rozważmy v1 = (0, 0),
v2 = (1, 0), v3 = (1, 1) i v4 = (0, 1), cztery wierzchołki jednostkowego kwadratu [0, 1]2 . Zauważmy, że
1
1
1
1
1 1
,
= v1 + 0v2 + v3 + 0v4 = 0v1 + v2 + 0v3 + v4 .
2 2
2
2
2
2
Definicja 5.1.5 Skończony zbiór punktów V = {v0 , v1 , . . . , vn } w Rd jest afinicznie niezależny jeżeli
dla każdego x ∈ S := conv V współczynniki λv w (5.1) są wyznaczone jednoznacznie. W takim
przypadku, dla v ∈ V współczynnik λv jest dobrze określoną funkcją λSv : S → [0, 1]. Funkcja ta
określana jest mianem współrzędnej barycentrycznej punktu x względem v w S.
Uwaga 5.1.6 Niech V = {v0 , v1 , . . . , vn } ⊂ Rd . Wtedy V jest afinicznie niezależny wtedy i tylko
wtedy gdy zbiór wektorów {v1 − v0 , v2 − v0 , . . . , vn − v0 } jest liniowo niezależny.
Dowód: ćwiczenie.
5.1.3
Sympleksy
Definicja 5.1.7 Niech V = {v0 , v1 , . . . , vn } będzie afinicznie niezależnym zbiorem punktów w Rd .
Zbiór S = conv V nazywamy sympleksem, a dokładniej n-sympleksem rozpiętym na wierzchołkach
v0 , v1 , . . . , vn i oznaczamy go hv0 , v1 , . . . , vn i. W pewnych sytuacjach, by podkreślić odmienność od
tak zwanego abstrakcyjnego sympleksu, mówimy o sympleksie geometrycznym zamiast po prostu o
sypmpleksie. Liczba n to wymiar S. Jeśli V 0 jest podzbiorem V o k ¬ n wierzchołkach, to zbiór
S 0 = conv V 0 nazywany jest k-ścianą sympleksu S. Ściana S 0 jest właściwa, jeżeli S 0 6= S. Piszemy
S 0 ≺ S na oznaczenie, że S 0 jest ścianą właściwą S.
69
5.1. KOMPLEKSY SYMPLICJALNE.
Twierdzenie 5.1.8 Dowolne dwa n-sympleksy są homeomorficzne. Co więcej, dla dowolnego nsympleksu S = hv0 , v1 , . . . , vn i i dowolnego i = 0, 1, . . . , n i-ta współrzędna barycentryczne λi : S →
[0, 1] jest funkcją ciągłą.
Dowód: ćwiczenie.
Definicja 5.1.9 Niech S będzie sympleksem. Kombinatorycznym brzegiem sympleksu S nazywamy
zbiór
[
Bd S := { T ⊂ S | T jest ścianą właściwą S },
a kombinatorycznym wnętrzem zbiór
Int S := S \ Bd S.
Twierdzenie 5.1.10 Dla dowolnego sympleksu S mamy
S=
[
{ Int T | T ściana S }.
Dowód: ćwiczenie.
Należy zwrócić uwagę, że kombinatoryczny brzeg i wnętrze pokrywają się z topologicznym brzegiem i
wnętrzem tylko dla d-wymiarowych sympleksów w Rd .
5.1.4
Kompleksy symplicjalne
Definicja 5.1.11 Kompleks symplicjalny S, to skończony zbiór sympleksów taki, że
1. każda ściana sympleksu w S jest w S,
2. część wspólna dowolnych dwóch sympleksów w S jest ich wspólną ścianą.
Wymiar kompleksu S, oznaczny dim S, to maximum wymiarów jego sympleksów.
Przykład 5.1.12 Najprostszym przykładem kompleksu symplicjalnego jest zbiór wszystkich ścian
ustalonego sympleksu. Kompleks ten również określamy mianem sympleksu, co nie prowadzi do
nieporozumień, bo na podstawie kontekstu można ustalić, czy chodzi o sympleks jako podzbiór Rd ,
czy o sympleks jako kompleks symplicjalny.
70
ROZDZIAŁ 5. WIELOŚCIANY.
@
@
@
@
@
@
@
@
@
@
Rysunek 5.1: Podział kwadratu na trójkąty: Tylko dwa pierwsze podziały są triangulacjami.
Sympleksy 0-wymiarowe w S określamy mianem wierzchołków kompleksu S, a sympleksy 1-wymiarowe
w S mianem krawędzi kompleksu S. Zbiór k-wymiarowych sympleksów w kompleksie symplicjalnym S
oznaczamy S k . W szczególności S 0 to zbiór wierzchołków kompleksu S. Notację tę stosujemy też do
pojedynczych sympleksów, tzn. jeżeli S jest sympleksem, to symbolem S0 oznaczamy zbiór wierzchołków
S.
Twierdzenie 5.1.13 Zbiór co najwyżej k-wymiarowych sympleksów kompleksu symplicjalnego S jest
kompleksem symplicjalnym. Nazywamy go k-szkieletem kompleksu S.
Dowód: ćwiczenie.
Definicja 5.1.14 Suma mnogościowa wszystkich sympleksów pewnego kompleksu symplicjalnego S
w Rd określana jest mianem nośnika S lub bryły S i oznaczana jest przez |S|. Podzbiór P ⊂ Rd jest
wielościanem jeżeli P jest bryłą pewnego kompleksu symplicjalnego S. W tym przypadku mówimy,
że S jest triangulacją P .
Wielościan dysponuje naturalną topologią indukowaną przez topologie Rd . Interesuje nas badanie
tej topologii. Triangulacje wielościanów są pomocniczą strukturą, która, jak zobaczymy, bardzo ułatwia
badanie topologii wielościanów.
Musimy być jednak świadomi, że wielościan może mieć i na ogół ma, wiele różnych triangulacji. Rys. 5.1
przedstawia przykłady róznych podziałów kwadratu na trójkąty. Dwa pierwsze podziały są triangulacjami,
ale trzeci podział nią nie jest, bo przecięcie każdego z dwóch trójkątów o wierzchołku w lewym dolnym
rogu z większym trójkątem o wierzchołku w prawym górnym roku nie jest ścianą tego ostatniego.
71
5.1. KOMPLEKSY SYMPLICJALNE.
v4
v3
v1
v2
Rysunek 5.2: Triangulacja torusa.
Przykład 5.1.15 Przypomnijmy, że torus to przestrzeń topologiczna homeomorficzna z S 1 × S 1
(patrz przykład 3.4.6). Typowy torus nie jest wielościanem. Jednak można skonstruować taki, który
jest. Niech G będzie brzegiem jakiegokolowiek trójkąta w R2 . Wtedy G jest homeomorficzne z okręgiem jednostkowym. Zatem T := G × G ∈ R4 jest torusem. Aby skonstruować triangulację T , przedstawimy T jako kwadrat na rys. 5.2, w którym przeciwległe boki zostały ze sobą sklejone. Dokładniej,
rozważmy kwadrat [0, 3]2 = hv1 , v2 , v3 , v4 i, gdzie v1 = (0, 0), v2 = (3, 0), v3 = (3, 3), v4 = (0, 3). Zegnijmy ten kwadrat wzdłuż linii x = 1 and x = 2, sklejając punkty boku [v1 , v4 ] z naprzeciwległymi
punktami boku [v2 , v3 ] tak by wierzchołek v1 został zidentyfikowany z wierzchołkiem v2 , a wierzchołek v4 z v3 . Otrzymujemy w ten sposób cylinder w R3 , którego podstawą jest trójkąt równoboczny
na płaszczyźnie y = 0 . Cylinder ten ponownie zginamy wzdłuż linii y = 1 i y = 2 (tego nie da się
zrobić w R3 bez rozciągania, ale można to zrobić w R4 ) i sklejamy krawędź [v1 , v2 ] z [v4 , v3 ]. W ten
sposób wszystkie cztery wierzchołki v1 , v2 , v3 , v4 wyjściowego kwadratu zostają utożsamione. Cztery
linie, wzdłuż których dokonywaliśmy zgięć, dzielą kwadrat na dziewięć jednostkowych kwadratów.
Każdy z nich może być podzielony na dwa trójkąty, tak jak przedstawiono to na rys 5.2. Niech S
będzie zbiorem wszystkich wierzchołków, krawędzi i trójkątów w T otrzymanych tą drogą. Pomimo,
że niektóre wierzchołki i krawędzie zostały utożsamione w trakcie konstrukcji, można sprawdzić, że
S jest kompleksem symplicjalnym.
5.1.5
Własności kompleksów symplicjalnych.
72
ROZDZIAŁ 5. WIELOŚCIANY.
Twierdzenie 5.1.16 Niech S będzie kompleksem symplicjalnym, a Y przestrzenią topologiczną. Odwzorowanie f : |S| → Y jest ciągłe wtedy i tylko wtedy gdy dla każdego σ ∈ S jest ciągłe zawężenie
f|σ : σ → Y .
Dowód: Niech B będzie zbiorem domkniętym w Y . Załóżmy najpierw, że f jest ciągłe. Wtedy f −1 (B)
jest domknięte. Mamy
f|σ−1 (B) = σ ∩ f −1 (B),
Zatem f|σ−1 (B) jest domknięte jako przecięcie zbiorów domkniętych.
Załóżmy z kolei, że wszystkie f|σ są ciągłe. Mamy
f −1 (B) =
f|σ−1 (B).
[
σ∈S
Ponieważ każdy ze zbiorów f|σ−1 (B) jest domknięty jako przeciwobraz zbioru domkniętego przez odwzorowanie ciągłe, więc f −1 (B) jest domknięty jako suma skończona zbiorów domkniętych.
Twierdzenie 5.1.17 Niech S będzie rodziną sympleksów w Rd . Rodzina ta jest kompleksem symplicjalnym wtedy i tylko wtedy gdy zachodzą następujące dwa warunki:
(i) każda ściana sympleksu w S jest w S,
(ii) dowolne dwa różne sympleksy w S mają rozłączne kombinatoryczne wnętrza.
Ćwiczenie 5.1.18 Udowowdnić tw. 5.1.17 wykorzystując w tym celu tw. 5.1.10.
Dla kompleksu symplicjalnego S i punktu x ∈ ||S| kładziemy
S(x) := { σ ∈ S | x ∈ σ }.
Rodzina S(x) jest oczywiście niepusta.
Twierdzenie 5.1.19 Niech S będzie kompleksem symplicjalnym. Wtedy
|S| =
[
Int σ
σ∈S
Dowód: Niech x ∈ |S|. Niech σ0 ∈ S(x) będzie elementem S(x) o najmniejszym wymiarze. Wtedy
x 6∈ Bd σ, bo kombinatoryczny brzeg σ jest sumą ścian właściwych σ, a ściany właściwe mają niższy
S
wymiar. Zatem x ∈ Int σ0 ⊂ σ∈S Int σ.
Z tw. 5.1.17 i tw. 5.1.19 dostajemy następujący wniosek.
73
5.1. KOMPLEKSY SYMPLICJALNE.
Wniosek 5.1.20 Dla każdego punktu x ∈ S istnieje dokładnie jeden sympleks σ ∈ S taki, że x ∈
Int σ.
Niech v będzie wierzchołkiem w kompleksie symplicjalnym S. Definiujemy współrzędną barycentryczną
względem wierzchołka v jako fukcję tv : |S| → R zdefiniowaną dla x ∈ |S| wzorem
tv (x) :=
λσ (x)
v
0
x ∈ σ, v ∈ σ
w przeciwnym razie.
(5.2)
Twierdzenie 5.1.21 Funkcja tv : |S| → R jest ciągła
Ćwiczenie 5.1.22 Udowodnić tw. 5.1.21, wykorzystując w tym celu tw. 5.1.16.
Twierdzenie 5.1.23 Dla dowolnych v0 , v1 , . . . vn ∈ S 0 zachodzi
Int hv0 , v1 , . . . , vn i = { x ∈ |S| | tvi (x) > 0 dla wszystkich i = 0, 1, 2, . . . n }
Dowód: Niech σ := hv0 , v1 , . . . , vn i. Rozważmy x = ni=0 ti vi ∈ Int σ ⊂ σ. Wtedy x = di=0 ti vi ,
P
gdzie ti ­ 0 oraz di=0 ti = 1. Zauważmy, ti = 0 jest równoważne x ∈ hv0 , v1 , . . . , vi−1 , vi+1 , . . . , vn i, skąd
natychmiast wynika teza.
P
5.1.6
P
Stożki.
Twierdzenie 5.1.24 Niech S będzie kompleksem symplicjalnym w Rd , a w ∈ Rd \|S| ma tę własność,
że każda półprosta wychodząca z w przecina bryłę S w co najwyżej jednym punkcie. Wtedy
w ∗ S := S ∪ { conv ({w} ∪ σ) | σ ∈ S }
jest kompleksem symplicjalnym zwanym stożkiem S względem w.
74
ROZDZIAŁ 5. WIELOŚCIANY.
Ćwiczenie 5.1.25 Udowodnić tw. 5.1.24 wykorzystując następujący schemat:
1. Jeśli σ ∈ S, to {w} ∪ σ jest afinicznie niezależny, tak więc w ∗ S jest rodziną sympleksów.
2. Każdy sympleks w w ∗ S jest albo sympleksem w S albo postaci conv ({w} ∪ σ) dla pewnego
σ ∈ S, zatem jego ściany też są w w ∗ S.
3. Przecięcie wnętrz dwóch różnych sympleksów z w∗S jest zawsze puste, bo wynika to z tw. 5.1.17
gdy oba sympleksy są w S, a z założenia o półprostych wychodzących z w w pozostałych
przypadkach.
4. Zatem teza zachodzi na mocy tw. 5.1.17.
5.2
5.2.1
Przestrzenie homotopijne
Homotopia
Definicja 5.2.1 Niech X, Y będą przestrzeniami topologicznymi, a f, f 0 : X → Y odwzorowaniami
ciągłymi. Mówimy, że f i f 0 są homotopijne jeżeli istnieje odwzorowanie ciągłe H : X × [0, 1] → Y
takie, że dla każdego x ∈ X mamy H(x, 0) = f (x) oraz H(x, 1) = f 0 (x). Odwzorowanie H o takich
własnościach nazywamy homotopią łączącą f z f 0 .
Dla odwzorowania H : X × [0, 1] → Y oraz t ∈ [0, 1] często rozważamy odwzorowanie częściowe
Ht : X 3 x 7→ H(x, t) ∈ Y.
Łatwo zauważyć, że jeśli H jest homotopią łączącą f z f 0 , to wszystkie odwzorowania Ht są ciągłe oraz
H0 = f i H1 = f 0 . Na odwrót, jeśli dana jest rodzina {Ht : X → Y }t∈[0,1] odwzorowań taka, że H0 = f ,
H1 = f 0 oraz odwzorowanie
H : X × [0, 1] 3 (x, t) 7→ Ht (x) ∈ Y
jest ciągłe to definiuje ono homotopię łączącą f z f 0 . Dlatego homotopię H często utożsamiać będziemy
z rodziną odwzorowań {Ht }t∈[0,1] .
Twierdzenie 5.2.2 Załóżmy, że X jest dowolna przestrzenią topologiczną, natomiast Y jest podzbiorem wypukłym przestrzeni Rd . Wtedy dowolne dwa odwzorowania z X do Y są homotopijne.
Dowód: Niech f, f 0 : X → Y będą odwzorowaniami ciągłymi. Łatwo sprawdzamy, że homotopią
łączącą f z f 0 jest odwzorowanie H : X × [0, 1] → Y dane dla (x, t) ∈ X × [0, 1] wzorem
H(x, t) := (1 − t)f (x) + tf 0 (x).
5.2. PRZESTRZENIE HOMOTOPIJNE
Twierdzenie 5.2.3 Relacja homotopijności odwzorowań w zbiorze odwzorowań ciągłych przestrzeni
X w przestrzeń Y jest relacją równoważności.
Dowód: ćwiczenie.
Twierdzenie 5.2.4 Załóżmy, że f, f 0 : X → Y oraz g, g 0 : Y → Z są odwzorowaniami ciągłymi.
Jeśli f jest homotopijne z f 0 oraz g jest homotopijne z g 0 to g ◦ f jest homotopijne z g 0 ◦ f 0 .
Ćwiczenie 5.2.5 Udowodnić tw. 5.2.4 najpierw w szczególnym przypadku gdy f = f 0 lub g = g 0 , a
następnie wykorzystać przypadek szczególny i tw. 5.2.3 do pokazania przypadku ogólnego.
5.2.2
Homotopijność przestrzeni
Definicja 5.2.6 Mówimy, że przestrzenie topologiczne X i Y są homotopijne jeżeli istnieją odwzorowania ciągłe f : X → Y oraz g : Y → X takie, że g ◦ f jest homotopijne z idX , a f ◦ g jest
homotopijne z idY .
Twierdzenie 5.2.7 Relacja homotopijności przestrzeni jest relacją równoważności.
Dowód: ćwiczenie.
Definicja 5.2.8 Klasę równoważności przestrzeni topologicznej X względem relacji homotopijności
nazywamy typem homotopii tej przestrzeni.
75
76
ROZDZIAŁ 5. WIELOŚCIANY.
5.2.3
Przestrzenie ściągalne
Definicja 5.2.9 Przestrzeń topologiczną nazywamy ściągalną jeżeli ma taki sam typ homotopii jak
przestrzeń jednopunktowa.
Twierdzenie 5.2.10 Przestrzeń X jest ściągalna wtedy i tylko wtedy gdy idX jest homotopijna z
odwzorowaniem stałym
X 3 x 7→ x0 ∈ X
dla pewnego x0 ∈ X.
Dowód: ćwiczenie.
5.3
5.3.1
Odwzorowania
Podziały symplicjalne
Definicja 5.3.1 Mówimy, że kompleks symplicjalny T jest podziałem kompleksu symplicjalnego S
jeżeli |T | = |S| oraz każdy sympleks kompleksu T zawiera się w pewnym sympleksie kompleksu S.
Z powyższej definicji widać, że w szczególności sam kompleks S jest swoim własnym podziałem. Nazywamy go podziałem niewłaściwym, a wszystkie pozostałe podziały podziałami właściwymi. Zwróćmy
uwagę, że podział niewłaściwy jest jedynym możliwym podziałem 0-szkieletu kompleksu symplicjalnego.
Niech S będzie kompleksem symplicjalnym i niech T p będzie pewnym podziałem (właściwym lub
niewłaściwym) p-szkieletu kompleksu S. Niech σ ∈ S p+1 . Wtedy Bd σ jest bryłą pewnego podkomplesu
kompleksu T p , który oznaczymy Lσ . Jeśli wσ ∈ Int σ, to stożek σ ∗ Lσ jest kompleksem o bryle σ.
Definiujemy
[
T p+1 := T p ∪
Lσ .
σ∈S p+1
Nietrudno sprawdzić, że T p+1 jest kompleksem symplicjalnym. Nazywamy go podziałem (p + 1)-szkieletu
S otrzymanym przez stożkowanie T p względem punktów wσ .
Definicja 5.3.2 Środkiem ciężkości sympleksu σ = hw0 , w1 , . . . , wd i nazywamy punkt
σ̂ :=
d
X
1
wi .
i=0 d + 1
5.3. ODWZOROWANIA
77
Dla danego kompleksu symplicjalnego S konstruujemy rekurencyjnie ciąg kompleksów symplicjalnych
T n następująco. Jako T 0 bierzemy 0-szkielet kompleksu S. Mając dany kompleks T p , który jest podziałem
p-szkieletu kompleksu S konstruujemy T p+1 jako podział (p + 1)-szkieletu S otrzymany przez stożkowanie
T p względem środków ciężkości (p + 1)-sympleksów kompleksu S.
Definicja 5.3.3 Kompleks symplicjalny T d skonstruowany według opisanego wyżej schematu dla
d := dim S nazywamy pierwszym podziałem barycentrycznym kompleksu symplicjalnego S lub krótko
podziałem barycentrycznym S i oznaczamy go sd S. Dla n > 1 definiujemy rekurencyjnie n-ty podział
barycentryczny S jako
sdn S := sd sdn−1 S .
Lemat 5.3.4 Kompleks sd S jest kolekcją sympleksów hσˆ1 , σˆ2 , . . . , σˆk i dla dowolnych σ1 , σ2 , . . . , σk ∈
S takich, że σ1 ≺ σ2 ≺ · · · ≺ σk .
Ćwiczenie 5.3.5 Udowodnić lemat 5.3.4 indukcyjnie względem n w Ln .
Twierdzenie 5.3.6 Niech S będzie kompleksem symplicjalnym w Rd . Dla dowolnego > 0 istnieje
n ∈ N takie, że sdn S jest podziałem S, którego sympleksy mają średnice nie większe niż .
78
ROZDZIAŁ 5. WIELOŚCIANY.
Ćwiczenie 5.3.7 Udowodnić tw. 5.3.6 w oparciu o następujący schemat.
1. Zauważyć, że w dowodzie można posłużyć się dowolną metryką indukującą topologię |S| i
posłużyć się metryką maksimum.
2. Pokazać, że średnica sympleksu to maksimum odległości jego wierzchołków.
3. Pokazać, że jeżeli σ ∈ S p , to dla dowolnego z ∈ σ
d(σ̂, z) ¬
p
diam σ.
p+1
4. Pokazać, że jeśli σ ∈ S p , a τ ∈ sd σ, to
diam τ ¬
p
diam σ.
p+1
5. Pokazać, że
n
max { diam τ | τ ∈ sd S } ¬
5.3.2
d
d+1
!n
max { diam σ | σ ∈ S }.
Odwzorowania symplicjalne
Niech V = {v0 , v1 , . . . , vd } i W = {w0 , w1 , . . . , wd0 }, a f : V → W niech będzie dowolnym odwzorowaniem.
Indukuje ono odwzorowanie |f | : conv V → conv W dane wzorem
d
X
|f |(
λi vi ) :=
d
X
λi f (vi )
i=0
i=0
zwane rozszerzeniem afinicznym f .
Niech S i T będą kompleksami symplicjalnymi.
Definicja 5.3.8 Odwzorowanie f : S 0 → T 0 nazywa się odwzorowaniem symplicjalnym, jeżeli dla
każdego sympleksu hv0 , v1 , . . . , vp i należącego do S sympleks hf (v0 ), f (v1 ), . . . , f (vp )i należy do T .
Jeśli f : S 0 → T 0 jest odwzorowaniem symplicjalnym, to dla każdego σ ∈ S mamy rozszerzenie
afiniczne |f|σ0 | : σ → conv f (σ0 ). Łatwo sprawdzić, że sklejenie takich rozszerzeń
|f | :=
[
|f|σ0 | : |S| → |T |
σ∈S
jest dobrze określonym odwzorowaniem bryły kompleksu S w bryłę kompleksu T , zwanym rozszerzeniem
afinicznym odwzorowania symplicjalnego f .
79
5.3. ODWZOROWANIA
Twierdzenie 5.3.9 Rozszerzenie afiniczne |f | : |S| → |T | odwzorowania symplicjalnego f : S 0 →
T 0 jest odwzorowaniem ciągłym.
Dowód: ćwiczenie.
Twierdzenie 5.3.10 Niech f : S 0 → T 0 będzie odwzorowaniem symplicjalnym. Dla dowolnego sympleksu σ = hv0 , v1 , . . . vn i ∈ S mamy
|f |(Int hv0 , v1 , . . . vn i) ⊂ Int hf (v0 ), f (v1 ), . . . f (vn )i.
Dowód: Rozważmy x = ni=0 λi vi ∈ Int hv0 , v1 , . . . vn i. Z tw. 5.1.23 wnosimy, że dla wszystkich i zachoP
dzi λi > 0. Ponieważ h(x) = ni=0 λi h(vi ), więc również λh(vi ) (x) > 0, skąd |f |(x) ∈ Int hf (v0 ), f (v1 ), . . . f (vn )i.
P
Twierdzenie 5.3.11 Jeśli S, T i U są kompleksami symplicjalnymi, a f : S 0 → T 0 i g : T 0 → U 0
są odwzorowaniami symplicjalnymi, to g ◦ f : S 0 → U 0 jest odwzorowaniem symplicjalnym oraz
|g ◦ f | = |g| ◦ |f |.
Dowód: ćwiczenie.
Odwzorowanie bryły kompleksu symplicjalnego S w bryłę kompleksu symplicjalnego T nazywa się
odwzorowaniem symplicjalnym, jeżeli jest ono rozszerzeniem afinicznym pewnego odwzorowania symplicjalnego zbioru wierzchołków S w zbiór wierzchołków T .
Ćwiczenie 5.3.12 Podać przykład bijektywnego odwzorowania symplicjalnego f : S 0 → T 0 takiego, że |f | : |S| → |T | nie jest homeomorfizmem.
Twierdzenie 5.3.13 Jeśli f : S 0 → T 0 jest bijektywnym odwzorowaniem symplicjalnym oraz f −1
też jest odwzorowaniem symplicjalnym, to |f | : |S| → |T | jest homeomorfizmem.
Dowód: ćwiczenie.
80
ROZDZIAŁ 5. WIELOŚCIANY.
5.3.3
Lemat Spernera
Lemat 5.3.14 (Lemat Spernera) Niech S będzie podziałem sympleksu S := ha0 , a1 , . . . ad i ⊂ Rd ,
a v : S 0 → {0, 1, . . . d} będzie odwzorowaniem o tej własności, że dla każdego wierzchołka b ∈ S 0 i
ściany hai0 , ai1 , . . . aik i sympleksu S
b ∈ hai0 , ai1 , . . . aik i ⇒ v(b) ∈ { i0 , i1 , . . . ik }.
Wtedy istnieje co najmniej jeden sympleks σ ∈ S taki, że v na wierzchołkach σ przyjmuje wszystkie
wartości 0, 1, . . . d.
Dowód: Dla i = 0, 1, . . . , d połóżmy
Ri := { hb0 , b1 , . . . , bi i ∈ S i | v({b0 , b1 , . . . , bi }) = {0, 1, . . . , i} },
ri := card { σ ∈ Ri | σ ⊂ ha0 , a1 , . . . ai i }.
Pokażemy tezę mocniejszą, a mianowicie, że
rd
mod 2 = 1,
(5.3)
czyli, że liczba tych sympleksów w S, dla których zachodzi teza lematu, jest nieparzysta. Dla d = 0 teza
ta jest oczywista. Załóżmy zatem, że
ri mod 2 = 1
dla i < d.
Dla σ ∈ S d przyjmijmy
rσ := card { τ ∈ Rd−1 | τ ⊂ σ }
i oznaczmy przez Wσ zbiór wartości odwzorowania v na wierzchołkach sympleksu σ. Łatwo sprawdzić, że
0
{ 0, 1, . . . , d − 1 } 6⊂ Wσ
rσ = 1 { 0, 1, . . . , d } = Wσ
2 w pozostałych przypadkach.
Stąd
X
rσ = rd
mod 2.
σ∈S d
Z drugiej strony, każdy sympleks τ ∈ Rd−1 albo nie zawiera się w żadnej ze ścian sympleksu S, albo leży
w ścianie ha0 , a1 , . . . ad−1 i. W pierwszym przypadku τ jest ścianą dokładnie dwóch sympleksów z S d , a w
drugim dokładnie jednego takiego sympleksu. Zatem
X
σ∈S d
rσ = rd−1
mod 2.
81
5.3. ODWZOROWANIA
Stąd
rd = rd−1
mod 2,
a z założenia indukcyjnego
rd−1
mod 2 = 1
Tak więc
rd = 1
mod 2.
Definicja 5.3.15 Niech kompleks symplicjalny T będzie podziałem kompleksu symplicjalnego S,
a f : |T | → |S| niech będzie odwzorowaniem symplicjalnym. Mówimy, że f jest odwzorowaniem
standardowym, jeżeli dla każdych T ∈ T , S ∈ S takich, że T ⊂ S, jeśli w jest wierzchołkiem T , to
f (w) jest wierzchołkiem S.
Wniosek 5.3.16 Jeśli f : |T | → |S| jest odwzorowaniem standardowym bryły podziału T kompleksu
symplicjalnego S w bryłę S, to f jest surjekcją.
Dowód: Wystarczy pokazać, że dla każdego sympleksu S ∈ S jest S ⊂ f (|T |). Ustalmy więc S =
hv0 , v1 , . . . vn i ∈ S i połóżmy T S := { T ∈ T | T ⊂ S }. Oczywiście T S jest kompleksem symplicjalnym.
Niech V := { v0 , v1 , . . . vn } oznacza zbiór wierzchołków sympleksu S, a W zbiór wierzchołków kompleksu
T S . Rozważmy bijekcję
α : { 0, 1, 2, . . . n } 3 i 7→ vi ∈ V
oraz odwzorowanie
κ : W 3 w 7→ α−1 (f (w)) ∈ { 0, 1, 2, . . . n }.
Ponieważ f jest standardowe, odwzorowanie κ spełnia założenia lematu Spernera. Zatem istnieje sympleks
T = hw0 , w1 , . . . wn i ∈ T S taki, że κ(w0 , w1 , . . . wn ) = { 0, 1, 2, . . . n }. Stąd wnosimy, że S ⊂ f (T ) ⊂ f (|T |).
5.3.4
Twierdzenie Brouwera o punkcie stałym
Lemat 5.3.17 Niech S := ha0 , a1 , . . . ad i ⊂ Rd będzie sympleksem, a {Fi }di=0 rodziną podzbiorów
domkniętych S taką, że dla dowolnego {i0 , i1 , . . . , ik } ⊂ {0, 1, . . . , d} zachodzi
hai0 , ai1 , . . . aik i ⊂
k
[
j=0
Wtedy
d
\
i=0
Fi 6= ∅.
F ij .
(5.4)
82
ROZDZIAŁ 5. WIELOŚCIANY.
Dowód: Dla dowodu nie wprost załóżmy, że ki=0 Fi = ∅. Biorąc Ui := S \ Fi otrzymujemy rodzinę
{Ui }di=0 stanowiącą pokrycie otwarte sympleksu S. Niech > 0 będzie liczbą Lebesgue’a tego pokrycia
(por. lemat 4.1.11). Niech S będzie podziałem barycentrycznym S na sympleksy o średnicach mniejszych
niż . Z (5.4) wynika, możemy rozważać odwzorowanie symplicjalne f , które wierzchołkowi w podziału S
przyporządkowuje taki wierzchołek ai sympleksu S, że w ∈ Fi . Z (5.4) wynika natychmiast, że f możemy
dobrać tak, by było standardowe. Zatem z lematu 5.3.16 wynika, że istnieje sympleks hb0 , b1 , . . . bd i ∈ S d
taki, że f (bi ) = ai dla i = 0, 1, . . . , d. W szczególności dla każdego i = 0, 1, . . . , d mamy τ ∩ Fi 6= ∅, zatem
nie istnieje i ∈ { 0, 1, . . . , d } takie, że τ ⊂ Ui = S \ Fi . Ale to przeczy doborowi jako liczby Lebesgue
pokrycia {Ui }di=0 , bo średnica τ jest na mocy konstrukcji podziału S mniejsza niż .
T
Twierdzenie 5.3.18 (Brouwera o punkcie stałym) Niech f : X → X będzie ciągłym odwzorowaniem przestrzeni topologicznej X w siebie. Jeżeli X jest homeomorficzna z sympleksem, to f
ma punkt stały, tzn. punkt x ∈ X taki, że f (x) = x. W szczególności odwzorowanie ciągłe kuli
jednostkowej w Rd w siebie ma zawsze punkt stały.
Dowód: Najpierw załóżmy, że X jest sympleksem S := ha0 , a1 , . . . ad i ⊂ Rd . Niech λi : S → [0, 1] będą
współrzędnymi barycentrycznymi. Dla i = 0, 1, . . . , d połóżmy
λ∗i := λi ◦ f,
Fi := { x ∈ S | λ∗i (x) ¬ λi (x) }.
Ponieważ f oraz λi są ciągłe, więc λ∗i też jest ciągłe, a zatem zbiory Fi są domknięte. Aby pokazać, że
zbiory Fi spełniają (5.4) weźmy x ∈ hai0 , ai1 , . . . aik i. Wtedy
k
X
λij (x) = 1.
j=0
Z drugiej strony
k
X
λ∗ij (x) ¬ 1.
j=0
Zatem istnieje j0 ∈ {0, 1, . . . , k} takie, że
x ∈ Fij0 ⊂
k
[
F ij ,
j=0
co dowodzi (5.4).
T
Tak więc z lematu 5.3.17 istnieje x0 ∈ di=0 Fi . Mamy zatem λ∗i (x0 ) ¬ λi (x0 ). Ponieważ
d
X
i=0
λi (x) = 1 =
d
X
i=0
λ∗i (x),
83
5.3. ODWZOROWANIA
więc musi zachodzić λ∗i (x0 ) = λi (x0 ) dla i = 0, 1, . . . , d. Ale to oznacza, że x0 jest punktem stałym dla f
co dowodzi twierdzenia w przypadku, gdy X jest sympleksem.
Jeśli X jest homeomorficzne z sympleksem, a h : S → X jest homeomorfizmem, to f 0 : h−1 ◦ f ◦ h jest
odwzorowaniem ciągłym S w siebie, a więc ma punkt stały x0 . Wtedy f (h(x0 )) = h(x0 ), zatem h(x0 ) jest
punktem stałym odwzorowania f .
5.3.5
Retrakty.
Definicja 5.3.19 Niech A będzie podzbiorem przestrzeni topologicznej X. Mówimy, że odwzorowanie r : X → A jest retrakcją, jeżeli r jest ciągłe oraz r|A = idA . Mówimy, że A jest retraktem X jeżeli
istnieje retrakcja r : X → A.
Ćwiczenie 5.3.20 Pokazać, że tak singleton {0} jak i singleton {1} są retraktami odcinka [0, 1]
natomiast dubleton {0, 1} nie jest retraktem odcinka [0, 1].
Ćwiczenie 5.3.21 Pokazać, że każdy z dwóch okręgów składających się na brzeg pierścienia jest
jego retraktem. Czy cały brzeg pierścienia jest jego retraktem?
Twierdzenie 5.3.22 Sfera jednostkowa S d−1 nie jest retraktem kuli jednostkowej Dd ⊂ Rd .
Dowód: Przypuśćmy, że istnieje retrakcja r : Dd → S d−1 . Rozważmy odwzorowanie
f : Dd 3 x 7→ −r(x) ∈ S d−1 .
Jest ono ciągłe i nie ma punktu stałego, bo jeśli x ∈ Dd \ S d−1 , to f (x) 6= x gdyż f (x) ∈ S d−1 , a jeśli
x ∈ S d−1 , to f (x) = −r(x) = −x 6= x. Otrzymujemy zatem sprzeczność z tw. Brouwera o punkcie stałym.
Twierdzenie 5.3.23 Sfera S d nie jest przestrzenią ściągalną.
84
ROZDZIAŁ 5. WIELOŚCIANY.
Ćwiczenie 5.3.24 Przeprowadzić dowód nie wprost twierdzenia 5.3.23 w oparciu o następujący
schemat:
1. Niech H : S d × [0, 1] → S d będzie domniemaną homotopią pomiędzy odwzorowaniem stale
równym c ∈ S d , a identycznością na S d .
2. Rozważmy odwzorowanie r : Dd+1 → Dd+1 dane dla x ∈ Dd+1 wzorem
c
x=0,
r(x) :=
x
H( ||x|| , ||x||) w przeciwnym razie.
3. Odwzorowanie r jest retrakcją Dd+1 w S d , co przeczy tw. 5.3.22.
5.3.6
Gwiazdy.
Niech S będzie kompleksem symplicjalnym.
Definicja 5.3.25 Gwiazdą wierzchołka v w S nazywa się zbiór
St(v, S) :=
[
{ Int σ | v ∈ σ ∈ S }.
Twierdzenie 5.3.26 Dla dowolnego v ∈ S 0 mamy
St(v, S) = { x ∈ |S| | tv (x) > 0 }.
(5.5)
W szczególności gwiazda St(v, S) jest zbiorem otwartym w bryle |S|.
Dowód: Niech x ∈ St(v, S). Wtedy x ∈ Int σ dla pewnego σ ∈ S takiego, że v ∈ σ. Z definicji tv
i tw. 5.1.23 mamy tv (x) = λσv (x) > 0. Przyjmijmy z kolei, że tv (x) > 0. Z wniosku 5.1.20 znajdziemy
σ ∈ S takie, że x ∈ Int σ. Ponieważ tv (x) > 0 wnosimy z (5.2), że v ∈ σ. Zatem x ∈ St(v, S), co dowodzi
równości (5.5). Zatem mamy w szczególności
St(v, S) = t−1
v ((0, ∞)),
co pokazuje, że St(v, S) jest otwarty jako przeciwobraz zbioru otwartego przez odwzorowanie ciągłe.
5.3.7
Aproksymacja symplicjalna.
Rozważmy kompleksy symplicjalne S i T oraz odwzorowanie ciągłe f : |S| → |T |.
85
5.3. ODWZOROWANIA
Definicja 5.3.27 Mówimy, że h : S 0 → T 0 jest aproksymacją symplicjalną odwzorowania f , jeżeli
jest to odwzorowanie symplicjalne oraz dla każdego x ∈ |S| i dla każdego τ ∈ T
f (x) ∈ τ ⇒ |h|(x) ∈ τ.
(5.6)
Ćwiczenie 5.3.28 Niech S będzie kompleksem symplicjalnym składającym się z odcinka [0, 1] oraz
jego ścian. Niech T := sd S i U := sd T . Dla odwzorowania f : [0, 1] 3 x 7→ x2 ∈ [0, 1] wypisać
wszystkie (o ile w ogóle istnieją) aproksymacje symplicjalne S → S, T → T , U → T .
Ćwiczenie 5.3.29 Niech X będzie przestrzenią ilorazową [0, 1]/{0, 1}. Pokazać że przestrzeń ta jest
homeomorficzna z przestrzenią ilorazową R/Z. Pokazać, że odwzorowanie f : R/Z 3 [x] 7→ [2x] ∈
R/Z jest dobrze określone i ciągłe. Odpowiednio dobierając strukturę kompleksów symplicjalnych,
skonstruować aproksymację symplicjalną tego odwzorowania.
Twierdzenie 5.3.30 Jeśli h : S 0 → T 0 jest aproksymacją symplicjalną odwzorowania ciągłego f :
|S| → |T |, to f oraz |h| są homotopijne.
Dowód: Niech x ∈ |S|. Wybierzmy sympleks τ ∈ T taki, że f (x) ∈ τ . Na mocy (5.6) również
|h|(x) ∈ τ . Zatem odcinek łaczący f (x) i |h|(x) leży w |T |. Pozwala to zdefiniować potrzebną homotopię
H : |cS| × [0, 1] → |T | wzorem
H(x, t) := (1 − t)f (x) + t|h|(x).
Twierdzenie 5.3.31 Niech h : S 0 → T 0 będzie dowolnym odwzorowaniem. Odwzorowanie h jest
aproksymacją symplicjalną f wtedy i tylko wtedy gdy
f (St(v, S)) ⊂ St(h(v), T )
(5.7)
dla każdego v ∈ S 0 .
Dowód: Załóżmy najpierw, że h jest aproksymacją symplicjalną f . Niech v ∈ S 0 i x ∈ St(v, S). Zatem
z definicji gwiazdy wierzchołka v wnosimy, że istnieje sympleks σ = hv0 , v1 , . . . vn i ∈ S taki, że v ∈ σ
oraz x ∈ Int σ. Wybierzmy sympleks τ ∈ T taki, że f (x) ∈ int τ . Z założenia, że h jest aproksymacją
symplicjalną f wnosimy, że |h|(x) ∈ τ . Z kolei z tw. 5.3.10 mamy |h|(x) ∈ int hh(v0 ), h(v1 ), . . . h(vn )i.
Zatem hh(v0 ), h(v1 ), . . . h(vn )i ⊂ τ i w szczególności h(v) ∈ τ . W konsekwencji f (x) ∈ St(h(v), T ), a więc
zachodzi (5.7).
Załóżmy z kolei, że zachodzi h spełnia warunek (5.7). Aby sprawdzić, że h jest symplicjalne rozważmy
sympleks σ = hv0 , v1 , . . . , vn i ∈ S. Wybierzmy x ∈ Int σ oraz τ ∈ T takie, że f (x) ∈ Int τ . Mamy
86
ROZDZIAŁ 5. WIELOŚCIANY.
x ∈ St(vi , S) dla każdego wierzchołka vi sympleksu σ. Zatem f (x) ∈ St(h(vi ), T ) i w konsekwencji
Int τ ∩ St(h(vi ), T ) 6= ∅, skąd wnosimy, że h(vi ) ∈ τ . Zatem h jest symplicjalne. Pozostaje pokazać, że
zachodzi (5.6). Załóżmy zatem, że x ∈ |S|, τ ∈ T i f (x) ∈ τ . Niech σ = {v0 , v1 , . . . vn } ∈ S będzie
takie, że x ∈ int σ. Wtedy ∈ St(vi , S) dla wszystkich i, a w konsekwencji f (x) ∈ St(h(vi ), T ). Zatem
τ ∩ St(h(vi ) 6= ∅, skąd h(vi ) ∈ τ . W konsekwencji |h|(x) ∈ hh(v0 ), h(v1 ), . . . , h(vn )i ⊂ τ , co dowodzi, że h
jest aproksymacją symplicjalną f .
Definicja 5.3.32 Niech S, T będą kompleksami symplicjalnymi, a f : |S| → |T | odwzorowaniem
ciągłym. Mówimy, że f spełnia warunek gwiazdy względem S i T , jeżeli dla każdego wierzchołka
v ∈ S 0 istnieje wierzchołek w ∈ T 0 taki, że
f (St(v, S)) ⊂ St(w, T ).
Lemat 5.3.33 Jeśli ciągłe odwzorowanie f : |S| → |T | spełnia warunek gwiazdy względem S i T , to
posiada aproksymację symplicjalną h : S → T 0 .
Dowód: Ponieważ odwzorowanie f spełnia warunek gwiazdy względem S i T , możemy zdefiniować
odwzorowanie wierzchołków h : S 0 → T 0 tak, że własność (5.7) zachodzi.
Twierdzenie 5.3.34 Niech S, T będą kompleksami symplicjalnymi. Jeśli f : |S| → |T | jest odwzorowaniem ciągłym, to dla dostatecznie dużych n ma ono aproksymację symplicjalną h : | sdn S| → |T |.
Dowód: Rozważmy rodzinę
O := { f −1 (St(w, T ) | w ∈ T 0 }.
Pokażemy, że O = |S|. Inkluzja O ⊂ |S| jest oczywista. By pokazać inkluzję przeciwną weźmy x ∈ kS|.
Niech τ ∈ T będzie takim sympleksem, że f (x) ∈ Int τ i niech w będzie dowolnym wierchołkiem τ . Wtedy
S
f (x) ∈ St(w, T ), skąd wynika, że x ∈ O. Zatem O jest pokryciem |S|, a na mocy twierdzenia 5.3.26
jest to pokrycie otwarte. Niech λ będzie liczbą Lebesgue’a tego pokrycia. Niech n będzie na tyle duże,
by sympleksy w sdn S miały średnicę mniejszą niż λ/2. Wtedy każda gwiazda wierzchołka w sdn S ma
średnicę mniejszą niż λ, a zatem na mocy definicji liczby Lebesgue’a leży w jednym ze zbiorów pokrycia
O. To oznacza, że f spełnia warunek gwiazdy względem sdn S i T , a zatem na mocy lematu 5.3.33 ma
ono aproksymację symplicjalną h : | sdn S| → |T |.
S
S
Rozdział 6
Wprowadzenie w topologię algebraiczną
(W tym rozdziale szkice dowodów oraz ćwiczenia oznaczone jako trudne lub żmudne, a także
cały podrozdział 6.5 są nieobowiązkowe)
6.1
Wprowadzenie w teorię grup.
W rozdziale tym podamy zwięzły przegląd potrzebnych nam definicji i faktów z teorii grup, z pominięciem
dowodów. Materiał ten powinien być znany z kursu algebry.
6.1.1
Grupa.
Definicja 6.1.1 Grupą nazywamy zbiór G z działaniem · : G × G → G takim, że
(i) dla dowolnych g, h, k ∈ G mamy (g · h) · k = g · (h · k),
(ii) istnieje element e ∈ G zwany elementem neutralnym taki, że dla dowolnego g ∈ G mamy
e · g = g = g · e,
(iii) dla każdego g ∈ G istnieje element h ∈ G zwany elementem odwrotnym do g taki, że g · h =
h · g = e.
Grupę nazywamy przemienną lub abelową, jeżeli dodatkowo
(iv) dla dowolnych g, h ∈ G mamy g · h = h · g.
Wprost z definicji elementu neutralnego wywnioskować można, że element neutralny w grupie jest
dokładnie jeden. Zwyczajowo oznaczamy go literą e. Można też pokazać, że element odwrotny do elementu
g ∈ G jest dokładnie jeden. W przypadku grup, które nie są przemienne zwyczajowo stosujemy tzw. notację
87
88
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
multyplikatywną, w której działanie oznaczamy kropką (często stosujemy zwyczaj pomijania tej kropki
jeśli nie prowadzi to do nieporozumień), element neutralny oznaczmy znakiem 1, a element odwrotny do
elementu g znakiem g −1 . W przypadku grup przemiennych zwyczajowo stosujemy tzw. notację addytywną,
w której działanie oznaczamy znakiem +, element neutralny znakiem 0, a element odwrotny do g ∈ G
(zwany wtedy również elementem przeciwnym) znakiem −g.
Ćwiczenie 6.1.2 Pokazać, że zbiór liczb całkowitych z działaniem dodawania jest grupą.
Niech p będzie ustaloną liczbą naturalną większą od jeden. Niech
Zp := { 0, 1, . . . p − 1 }
oznacza zbiór możliwych reszt z dzielenia liczb naturalnych przez liczbę p.
Ćwiczenie 6.1.3 Niech x % p oznacza resztę z dzielenia x przez p. Pokazać, że zbiór Zp z działaniem
Zp × Zp 3 (x, y) 7→ (x + y) % p ∈ Zp
jest grupą.
6.1.2
Podgrupy i grupy ilorazowe.
Mówimy, że podzbiór H ⊂ G jest podgrupą grupy G, jeżeli H z działaniem będącym zawężeniem działania
w G do H jest grupą.
Podgrupa H ⊂ G zadaje w G relację równoważności: elementy g1 , g2 ∈ G są równoważne, jeżeli
−1
g1 g2 ∈ H. Chcielibyśmy przenieść działanie w grupie G na klasy równoważności tej relacji, zadając je
wzorem
[g1 ] · [g2 ] := [g1 · g2 ].
(6.1)
Jednakże, aby ta definicja była poprawna (nie zależała od wyboru reprezentanta), trzeba dodatkowo
założyć, że dla każdego h ∈ H i dla każdego g ∈ G mamy g · h · g −1 ∈ H. Podgrupa H o tej własności
nazywa się podgrupą normalną.
W przypadku gdy H jest podgrupą normalną, działanie na klasach równoważności zadane wzorem (6.1)
nie tylko jest poprawnie określone, ale w zbiorze klas równoważności zadaje strukturę grupy. Nazywamy
ją grupą ilorazową i oznaczamy G/H.
6.1.3
Homomorfizmy grup.
Odwzorowanie ϕ : G → H grupy G w grupę H nazywamy homomorfizmem grup jeżeli dla dowolnych
g1 , g2 ∈ G mamy
ϕ(g1 · g2 ) = ϕ(g1 ) · ϕ(g2 ).
89
6.2. GRUPA PODSTAWOWA
Homomorfizm ϕ nazywamy epimorfizmem, jeśli ϕ jest surjekcją, monomorfizmem, jeśli ϕ jest injekcją, a
izomorfizmem jeśli ϕ jest bijekcją.
Jądrem homomorfizmu ϕ, oznaczanym ker ϕ, nazywamy przeciwobraz poprzez ϕ elementu neutralnego
w grupie H. Jądro homomorfizmu ϕ jest podgrupą normalną grupy G. Homorfizm ϕ indukuje homomorfizm
ϕ̄ : G/ ker ϕ 3 [g] 7→ ϕ(g) ∈ H.
Jest on zawsze monomorfizmem oraz jest izomorfizmem, gdy ϕ jest epimorfizmem.
6.1.4
Generatory grupy.
Niech G będzie grupą. Dla podzbioru A ⊂ G oznaczmy przez <A> przecięcie wszystkich podgrup G
zawierających zbiór A. Łatwo sprawdzić, że <A> jest podgrupą G zwaną podgrupą generowaną przez A.
Można pokazać, że
Q
<A> := { ni=1 ai | ai ∈ A lub a−1
i ∈ A}
gdzie wśród ciągów (ai )ni=1 dopuszczamy ciąg pusty i przjmujemy, że produkt takiego ciągu jest równy
elementowi neutralnemu grupy.
Mówimy, że zbiór A jest układem generatorów grupy G lub krótko, że generuje grupę G, jeżeli <A> = G.
Mówimy, że grupa jest skończenie generowana, jeżeli posiada skończony układ generatorów. Mówimy, że
układ generatorów A jest bazą grupy G jeżeli dla każdej grupy H oraz funkcji a : A → H istnieje dokładnie
jeden homomorfizm grup f : G → H taki, że f|A = a.
Dla podzbioru A ⊂ G przyjmijmy oznaczenie
AG := { g −1 ag | g ∈ G i a ∈ A }.
Grupa <AG> generowana przez AG jest zawsze podgrupą normalną grupy G. Jest to przecięcie wszystkich podgrup normalnych grupy G zawierających zbiór A. Nazywamy ją podgrupą normalną grupy G
generowaną przez zbiór A.
6.2
6.2.1
Grupa podstawowa
Przedziały
Niech Λ ⊂ R będzie przedziałem zwartym. Lewy i prawy koniec takiego przedziału oznaczać będziemy
odpowiednio Λ− i Λ+ , zatem Λ = [Λ− , Λ+ ]. Łatwo sprawdzić, że zachodzi równość
Λ = conv { Λ− , Λ+ },
zatem każdy przedział zwarty jest 1-sympleksem, którego wierzchołkami są końce przedziału. Dla dowolnych dwóch przedziałów zwartych Λ, ∆ mamy jednoznacznie wyznaczone odwzorowanie symplicjalne
κΛ,∆ : Λ → ∆, będące rozszerzeniem afinicznym odwzorowania przekształcającego Λ− w ∆− i Λ+ w
90
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
∆+ . Na mocy tw. 5.3.13 jest ono homeomorfizmem. Nazywać go będziemy homeomorfizmem afinicznym
przedziału Λ w przedział ∆.
Podziałem przedziału Λ nazywamy dowolny skończony, silnie rosnący ciąg punktów x := (xi )ni=0 taki,
że x0 = Λ− i xn = Λ+ . Z podziałem takim wiążemy kompleks symplicjalny S x złożony z singletonów
{xi } oraz przedziałów [xi−1 , xi ]. Oczywiście bryłą tego kompleksu jest przedział Λ. Jeśli ciąg y := (yi )m
i=0
jest podziałem przedziału ∆, a f : S x0 → S Y0 jest odwzorowaniem symplicjalnym, to wyznacza ono
jednoznacznie odwzorowanie symplicjalne brył |f | : Λ → ∆.
6.2.2
Drogi
Niech X będzie przestrzenią topologiczną.
Definicja 6.2.1 Drogą w przestrzeni X nazywamy odwzorowanie ciągłe a : Λ → X, którego dziedziną jest pewien przedział zwarty Λ = [Λ− , Λ+ ] ⊂ R. Wartość a w lewym końcu tego przedziału
nazywamy początkiem drogi i oznaczamy a− . Wartość a w prawym końcu tego przedziału nazywamy
końcem drogi i oznaczamy a+ .
Niech a, b będą drogami w X. Mówimy, że droga b jest przedłużeniem drogi a, jeżeli prawy koniec
dziedziny a pokrywa się z lewym końcem dziedziny drogi b oraz koniec drogi a pokrywa się z początkiem
drogi b. W takim przypadku suma mnogościowa a ∪ b jest również drogą o początku a− i końcu b+ , zwaną
sklejeniem dróg a i b.
Drogę, której dziedziną jest przedział [0, 1] nazywać będziemy normalną.
Jeśli a : Λ → X jest drogą w X, ∆ := [∆− , ∆+ ] ⊂ R przedziałem zwartym, a γ : ∆ → Λ jest ciągłe,
to a ◦ γ jest również drogą w X. Nazwiemy ją reorganizacją drogi a. W szczególności jako γ możemy
wziąć homeomorfizm afiniczny κ∆,Λ . Otrzymaną w ten sposób reorganizację drogi a do drogi określonej
na przedziale ∆ oznaczać będziemy a∆ i nazywać reorganizacją afiniczną drogi a do przedziału ∆. Reorganizację a[0,1] nazywać będziemy normalizacją drogi a. Oczywiście normalizacja jest drogą normalną.
Tak więc poprzez stosowną reorganizację każdą drogę zastąpić można drogą normalną. W dalszym ciągu
będziemy często domyślnie przyjmować, że rozważane drogi są normalne, chyba, że explicite podamy iż
chodzi o drogę, której dziedziną nie jest przedział [0, 1].
Definicja 6.2.2 W przypadku, gdy droga b jest przedłużeniem drogi a, definiujemy złożenie dróg a
i b jako
a · b := a[0, 1 ] ∪ b[ 1 ,1] .
2
2
Uwaga 6.2.3 Dla dowolnych p, q ∈ R spełniających p < q oraz dróg a, b w X mamy
(a · b)[p,q] = a[p, p+q ] ∪ b[ p+q ,q] .
2
2
91
6.2. GRUPA PODSTAWOWA
Dowód: ćwiczenie.
Łatwo zauważyć, że złożenie a · b jest zawsze drogą normalną, nawet jeśli drogi a, b nie są normalne.
Tym niemniej operację złożenia stosować będziemy głównie do dróg normalnych.
Ćwiczenie 6.2.4 Pokazać, że gdy drogi a, b są normalne, to ich złożenie jest drogą określoną dla
t ∈ [0, 1] wzorem
a(2t)
gdy 0 ¬ t ¬ 12 ,
(a · b)(t) :=
b(2t − 1) gdy 1 ¬ t ¬ 1.
2
Drogę odwrotną do drogi normalnej a definiujemy jako reorganizację a ◦ ι, gdzie ι jest rozszerzeniem
afinicznym do przedziału [0, 1] odwzorowania, które posyła 0 w 1 i 1 w 0. Drogę tę oznaczać będziemy
a−1 .
Ćwiczenie 6.2.5 Pokazać, że droga odwrotna do drogi a zadana jest wzorem
a−1 : [0, 1] 3 t 7→ a(1 − t) ∈ X.
Dla dróg stosujemy zwyczajowo terminologię i notację zapożyczoną z odwzorowań: złożenie odwzorowań, odwzorowanie odwrotne. Trzeba jednak wyraźnie uświadomić sobie, że złożenie i odwrotność w
sensie dróg to zupełnie co innego niż złożenie i odwrotność w sensie odwzorowań. Zazwyczaj na podstawie
kontekstu nie ma problemu z ustaleniem o jakie pojęcia nam chodzi, należy tu jednak zachować czujność.
Ustalmy dwa punkty x0 , x1 ∈ X i rozważmy dwie drogi a, b, obie o początku w x0 i końcu w x1 .
Interesuje nas relacja homotopii pomiędzy takimi drogami. Dla dróg postawimy jednak nieco bardziej
wymagającą definicję.
Definicja 6.2.6 Mówimy, że drogi a, b są homotopijne, jeżeli istnieje homotopia H : [0, 1] × [0, 1] →
X, łącząca drogę a z drogą b taka, że dla każdego s ∈ [0, 1] droga Hs jest również drogą o początku
w x0 i końcu w x1 .
Twierdzenie 6.2.7 Relacja homotopijności dróg w zbiorze dróg o początku w x0 ∈ X i końcu w
x1 ∈ X jest relacją równoważności.
Dowód: ćwiczenie.
92
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Twierdzenie 6.2.8 Niech a, a0 : [0, 1] → X będą homotopijnymi drogami o początku w x0 ∈ X i
końcu w x1 ∈ X, a b, b0 : [0, 1] → X homotopijnymi drogami o początku w x1 ∈ X i końcu w x2 ∈ X.
Wtedy a · b oraz a0 · b0 są również drogami homotopijnymi.
Dowód: ćwiczenie.
Twierdzenie 6.2.9 Jeśli a : [0, 1] → X jest drogą w X, a γ, γ 0 : [0, 1] → [0, 1] są odwzorowaniami
ciągłymi spełniającymi warunek γ(0) = γ 0 (0) i γ(1) = γ 0 (1), to reorganizacje a ◦ γ i a ◦ γ 0 są
homotopijne. W szczególności, jeśli γ(0) = 0 i γ(1) = 1, to droga a i jej reorganizacja a ◦ γ są
homotopijne.
Ćwiczenie 6.2.10 Udowodnić tw. 6.2.9 wykorzystując idee zawarte w dowodzie tw. 5.2.2 oraz
tw. 5.2.4.
6.2.3
Grupa podstawowa
Definicja 6.2.11 Drogę a : [0, 1] → X nazywamy pętlą zaczepioną w x0 ∈ X jeżeli tak początek jak
i koniec drogi a jest w x0 . Klasą homotopii pętli a nazywamy klasę równoważności pętli a względem
relacji homotopijności dróg w zbiorze pętli zaczepionych w x0 .
Oznaczmy przez π̄1 (X, x0 ) rodzinę klas homotopii pętli zaczepionych w x0 . Z twierdzenia 6.2.8 wynika,
że działanie
π̄1 (X, x0 ) 3 ([a], [b]) 7→ [a · b] ∈ π̄1 (X, x0 ).
(6.2)
jest dobrze określone. Nazywamy je mnożeniem klas homotopii pętli zaczepionych w x0 .
Twierdzenie 6.2.12 Para (π̄1 (X, x0 ), ·) jest grupą, w której elementem neutralnym jest klasa homotopii pętli stałej, a elementem odwrotnym do klasy homotopii pętli a jest klasa homotopii pętli
odwrotnej a−1 .
Definicja 6.2.13 Grupę (π̄1 (X, x0 ), ·) nazywamy grupą podstawową przestrzeni X w punkcie x0 i
oznaczamy π1 (X, x0 ).
93
6.2. GRUPA PODSTAWOWA
Dowód tw. 6.2.12: Aby sprawdzić, że mnożenie klas homotopii pętli jest łączne, rozważmy trzy pętle
a, b, c zaczepione w x0 . Z uwagi 6.2.3 wnosimy, że
(a · b) · c = a[0, 1 ] ∪ b[ 1 , 1 ] ∪ c[ 1 ,1] ,
(6.3)
a · (b · c) = a[0, 1 ] ∪ b[ 1 , 3 ] ∪ c[ 3 ,1] .
(6.4)
4
4 2
2
2
2 4
4
Rozważmy zbiór par ϕ := { (0, 0), ( 12 , 14 ), ( 34 , 21 ), (1, 1) }. Zadaje on odwzorowanie symplicjalne podziału
(0, 12 , 34 , 1) w podział (0, 14 , 21 , 1). Mamy
a[0, 1 ] ∪ b[ 1 , 1 ] ∪ c[ 1 ,1] ◦ |ϕ| = a[0, 1 ] ∪ b[ 1 , 3 ] ∪ c[ 3 ,1]
4
4 2
2
2
2 4
4
Ponieważ |ϕ|(0) = 0 i |ϕ|(1) = 1, z (6.3), (6.4) i tw. 6.2.9 wnosimy, że drogi (a · b) · c i a · (b · c) są
homotopijne, zatem mnożenie klas homotopii pętli jest działaniem łącznym.
Aby pokazać, że klasa homotopii pętli stałej jest elementem neutralnym dla tego działania oznaczmy
przez e pętlę zaczepioną w x0 stale równą x0 . Niech a będzie dowolną pętlą zaczepioną w x0 . Rozważmy
zbiór par ϕ := { (0, 0), ( 12 , 1 }), (1, 1)). Zadaje on odwzorowanie symplicjalne podziału (0, 21 , 1) w przedział
[0, 1]. Mamy
a · e = a[0, 1 ] ∪ e[ 1 ,1] ◦ |ϕ| = a ◦ |ϕ|,
2
2
zatem ponownie z tw. 6.2.9 wnosimy, że pętle a · e i a są homotopijne, skąd [a] · [e] = [a]. Analogicznie
pokazujemy, że [e] = [e] · [a], skąd wnosimy, że [e] jest elementem neutralnym dla mnożenia klas homotopii
pętli.
Z tw. 5.2.4 i definicji pętli odwrotnej wynika, że jeśli pętle a i b są homotopijne, to homotopijne są też
pętle odwrotne a−1 i b−1 . Zatem poprawna jest definicja
[a]−1 := [a−1 ].
Rozważmy zbiór par ϕ := { (0, 0), ( 12 , 1 }), (1, 0)). Zadaje on odwzorowanie symplicjalne podziału (0, 12 , 1)
w przedział [0, 1]. Mamy
a · a−1 = a[0, 1 ] ∪ (a ◦ ι)[ 1 ,1] = a ◦ |ϕ|
2
2
Z kolei dla ψ := { (0, 0), (1, 0) } mamy |ψ| = 0[0,1] , zatem a ◦ |ψ| = e. Na mocy tw. 6.2.9 wnosimy,
że drogi a ◦ |ϕ| i a ◦ |ψ| są homotopijne, zatem a · a−1 oraz e są homotopijne, skąd [a] · [a]−1 = [e].
Równość [a]−1 · [a] = [e] dostajemy podobnie, rozważając zbiór par ϕ := { (0, 1), ( 12 , 2 }), (1, 1)) oraz
ψ := { (0, 1), (1, 1) }. Zatem [a]−1 jest elementem odwrotnym do [a].
94
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Ćwiczenie 6.2.14 Pokazać, że (a · b) · c danej jest dla t ∈ [0, 1] wzorem
((a · b) · c)(t) =
a(4t)
b(4t − 1)
c(2t − 1)
gdy 0 ¬ t ¬ 41 ,
gdy 14 ¬ t ¬ 12 ,
gdy 12 ¬ t ¬ 1,
a a · (b · c) wzorem
(a · (b · c))(t) =
a(2t)
b(4t − 2)
c(4t − 3)
gdy 0 ¬ t ¬ 12 ,
gdy 12 ¬ t ¬ 34 ,
gdy 34 ¬ t ¬ 1.
Pokazać, że rodzina odwzorowań Hsa,b,c : [0, 1] → X dana dla t ∈ [0, 1] wzorem
4t
a( s+1 )
gdy 0 ¬ t ¬ s+1
,
4
s+1
s+2
gdy 4 ¬ t ¬ 4 ,
gdy s+2
¬ t ¬ 1.
4
Hsa,b,c (t) := b(4t − s − 1)
4t−s−2
c( 2−s )
zadaje explicite homotopię dróg (a · b) · c i a · (b · c) i jest to ta sama homotopia, która jest rozważana
w dowodzie tw. 6.2.12.
Ćwiczenie 6.2.15 Pokazać, że rozważana w dowodzie tw. 6.2.12 homotopia pętli a · e z pętlą a
zadaje explicite rodzina odwzorowań Hsa,e : [0, 1] → X dana dla t ∈ [0, 1] wzorem
Hsa,e (t)
:=
a( 2t
s+1
x0
)
gdy 0 ¬ t ¬ s+1
,
2
s+1
gdy 2 ¬ t ¬ 1,
a homotopijność e · a z a zadaje explicite rodzina odwzorowań Hse,a : [0, 1] → X dana dla t ∈ [0, 1]
wzorem
x
gdy 0 ¬ t ¬ 1−s
,
0
2
Hse,a (t) :=
1−s
a( 2t+s−1 )
gdy 2 ¬ t ¬ 1.
s+1
Ćwiczenie 6.2.16 Pokazać, że rozważaną w dowodzie tw. 6.2.12 homotopię pętli a · a−1 i e zadaje
−1
explicite rodzina odwzorowań Hsa,a : [0, 1] → X dana dla t ∈ [0, 1] wzorem
a,a−1
Hs
a(2st)
(t) :=
a(2s(1 − t))
gdy 0 ¬ t ¬ 12 ,
gdy 21 ¬ t ¬ 1.
95
6.2. GRUPA PODSTAWOWA
Twierdzenie 6.2.17 Niech a będzie drogą w przestrzeni X o początku w x0 i końcu w x1 . Odwzorowanie
π1 (X, x0 ) 3 [x] 7→ [a] · [x] · [a]−1 ∈ π1 (X, x1 )
jest izomorfizmem grup.
Dowód: ćwiczenie.
Definicja 6.2.18 Przestrzeń topologiczną X nazywamy łukowo spójną, jeżeli dla dowolnych x0 , x1 ∈
X istnieje w X droga o początku w x0 i końcu w x1 .
Z tw. 6.2.17 wynika, że dla dla przestrzeni łukowo spójnej X można mówić po prostu o grupie podstawowej π1 (X) pomijając punkt, w którym tę grupę rozważamy, gdyż dla dowolnych dwóch punktów
x0 , x1 ∈ X grupy π1 (X, x0 ) i π1 (X, x1 ) są takie same z dokładnością do izomorfizmu.
Twierdzenie 6.2.19 Grupa podstawowa przestrzeni topologicznej łukowo spójnej jest niezmiennikiem homotopijnym, a więc w szczególności niezmiennikiem topologicznym.
6.2.4
Grupa krawędziowa
Niech S będzie spójnym kompleksem symplicjanym. Ciąg v = (v0 , v1 , . . . , vn ) wierzchołków S nazywamy
drogą krawędziową w S jeżeli hvi−1 , vi i jest krawędzią w S dla i = 1, 2, . . . n. Wierzchołek v0 nazywamy
początkiem drogi krawędziowej, a vn końcem drogi krawędziowej.
Jeśli w = (w0 , w1 , . . . , wm ) jest inną drogą krawędziową w S oraz początek drogi w pokrywa się z
końcem drogi v, to
vw := (v0 , v1 , . . . , vn , w1 , w2 , . . . wm )
jest również drogą krawędziową w S, zwaną złożeniem dróg krawędziowych v i w. Wprost z definicji wynika,
że złożenie dróg krawędziowych jest działaniem łącznym.
Drogą krawędziową w S jest również
v −1 := (vn , vn−1 , . . . v0 ).
Jest ona zwana drogą odwrotną do drogi krawędziowej v.
Droga krawędziowa w jest uproszczeniem drogi krawędziowej v w S jeżeli zachodzi jeden z następujących trzech przypadków:
(i) vi = vi+1 i w = (v0 , v1 , . . . , vi , vi+2 , . . . , vn ),
(ii) vi = vi+2 i w = (v0 , v1 , . . . , vi , vi+3 , . . . , vn ),
96
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
(iii) vi = vi+3 , hvi , vi+1 , vi+2 i ∈ S 2 i w = (v0 , v1 , . . . , vi , vi+4 , . . . , vn ).
Droga krawędziowa w jest deformacją drogi krawędziowej v w S jeżeli w jest uproszczeniem v lub v jest
uproszczeniem w. Mówimy, że dwie drogi krawędziowe v i w są krawędziowo homotopijne, jeżeli jedna z
nich powstaje z drugiej przez skończony ciąg deformacji.
Twierdzenie 6.2.20 Relacja krawędziowej homotopijności jest relacją równoważności. Operacje złożenia dróg krawędziowych oraz drogi odwrotnej do drogi krawędziowej są zgodne z tą relacją.
Dowód: ćwiczenie.
Drogę krawędziową v w S nazywamy pętlą krawędziową zaczepioną w x0 ∈ S 0 , jeżeli tak początkiem
jak i końcem v jest x0 .
Niech π̄(S, x0 ) oznacza zbiór klas równoważności względem krawędziowej homotopijności dla pętli
krawędziowych w S zaczepionych w x0 . Z tw. 6.2.20 wynika, że dla [v], [w] ∈ π̄(S, x0 ) mamy dobrze
zdefiniowaną operację złożenia
[v] · [w] := [v · w]
(6.5)
oraz odwrotności
[v]−1 := [v −1 ]
(6.6)
elementów π̄(S, x0 ).
Twierdzenie 6.2.21 Zbiór π̄(S, x0 ) wraz z operacją złożenia jest grupą. Elementem neutralnym w
tej grupie jest klasa równoważności jednoelementowej drogi (x0 ), a elementem odwrotnym do klasy
[v] jest klasa [v]−1
Dowód: ćwiczenie.
Grupę, o której mówi tw. 6.2.21 nazywamy grupą krawędziową kompleksu S w wierzchołku x0 i oznaczamy π(S, x0 ).
Niech v = (v0 , v1 , . . . , vn ) będzie drogą krawędziową w kompleksie symplicjalnym S. Rozważmy przedział [0, 1] z podziałem zadanym przez ciąg punktów ( nk )nk=0 . Odwzorowanie, które posyła wierzchołek
k
tego podziału w wierzchołek vk kompleksu S jest oczywiście odwzorowaniem symplicjalnym. Niech
n
av : [0, 1] → |S| będzie jego rozszerzeniem afinicznym.
Twierdzenie 6.2.22 Odwzorowanie ρ, które pętli krawędziowej v w S przypisuje pętlę av w |S|
indukuje izomorfizm grup
ρ∗ : π(S, x0 ) 3 [v] 7→ [av ] ∈ π1 (|S|, x0 ).
6.3. OBLICZANIE GRUPY PODSTAWOWEJ
97
Szkic dowodu: Sprawdzenie, że odzorowanie ρ∗ jest dobrze określone, czyli, że pętle krawędziowe krawędziowo homotopijne są przekształcane w pętle homotopijne nie nastręcza istotnych trudności. Podobnie
pokazanie, że ρ∗ jest homomorfizmem grup.
Aby pokazać, że ρ∗ jest epimorfizmem bierzemy pętlę b w S zaczepioną w x0 . Na mocy tw. 5.3.34 istnieje
aproksymacja symplicjalna ϕ : I 0 → S odwzorowania b określona na pewnym podziale I przedziału
[0, 1]. Łatwo sprawdzić, że ciągi wartości ϕ w kolejnych punktach podziału I tworzy pętlę krawędziową v
zaczepioną w x0 taką, że ρ(v) = |ϕ|. Zatem ρ∗ ([v]) = [ |ϕ| ]. Ale [ |ϕ| ] = [b], bo na mocy tw. 5.3.30 b oraz
|ϕ| są homotopijne. Dowodzi to, że ρ∗ jest epimorfizmem.
By pokazać, że ρ∗ jest monomorfizmem rozważmy pętlę krawędziową v zaczepioną w x0 , taką że
ρ∗ ([v]) = 0, czyli że av jest pętlą homotopijną z pętlą stałą. Niech H : [0, 1] × [0, 1] → |S| będzie homotopią łączącą pętlę av z pętlą stałą. Kwadrat [0, 1] × [0, 1] jest bryłą kompleksu symplicjalnego U
składającego się z dwóch trójkątów otrzymanych przez podzielenie kwadratu przekątną na dwie połowy
oraz ich ścian. Niech IU będzie podkompleksem, którego bryłą jest podstawa kwadratu [0, 1]×{0}. Zatem
na mocy tw. tw. 5.3.34 istnieje aproksymacja symplicjalna F : U 00 → S 0 odwzorowania H określona na
pewnym podziale U 0 kompleksu U. Ponieważ F jest odwzorowaniem symplicjalnym, więc obraz każdej
drogi krawędziowej w kompleksie U 0 jest drogą krawędziową w kompleksie S. Co więcej, jeśli dwie drogi
krawędziowe w U 0 są krawędziowo homotopijne w U 0 , to ich obrazy są krawędziowo homotopijne w S.
Niech u1 będzie drogą krawędziową w U 0 łączącą wierzchołki (0, 0) i (1, 0) kwardatu wzdłuż podstawy
[0, 1] × {0}, a u2 drogą krawędziową w w U 0 łączącą wierzchołki (0, 0) i (1, 0) wzdłuż pozostałych trzech
krawędzi. Łatwo sprawdzić, że drogi te są krawędziowo równoważne. Zatem krawędziowo równoważne są
również ich obrazy w1 i w2 w odwzorowaniu F . Ponieważ H jest stale równe wierzchołkowi x0 na bokach
{0} × [0, 1], [0, 1] × {1}, {1} × [0, 1], więc również F , jako aproksymacja symplicjalna, jest równe x0 na
tych bokach. Zatem droga w2 składa się z samych wierzchołków x0 , jest więc krawędziowo homotopijna z
drogą jednoelementową (x0 ). Z kolei droga krawędziowa w1 , potraktowana jako odwzorowanie z podziału
podstawy [0, 1] × {0}, w S 0 , jest aproksymacją symplicjalną rozszerzenia afinicznego av . Można sprawdzić,
że w takim przypadku drogi v i w1 są krawędziowo homotopijne. Zatem droga v jest krawędziowo homotopijna drodze jednoelementowej (x0 ), czyli jej klasa równoważności jest elementem neutralnym grupy
π(S, x0 ). Tak więc ρ∗ jest również monomorfizmem, a zatem izomorfizmem.
6.3
Obliczanie grupy podstawowej
Wielościan, którego wierzchołki mają współrzędne wymierne daje się opisać przy pomocy skończonego ciągu symboli. Wystarczy wybrać tyle symboli ile wierzchołków wielościanu, przypisać wierzchołkom
współrzędne oraz wypisać ciągi wierzchołków reprezentujących sympleksy w wielościanie. Przykładowo
taki opis dla trójkąta o wierzchołkach w punktach (0, 0), (1, 0), (0, 1) może wyglądać tak:
A(0, 0), B(1, 0), C(0, 1), AB, AC, BC, ABC.
Tak więc wielościan taki może stanowić wejście dla algorytmu. Powstaje naturalne pytanie, czy istnieje
algorytm, który na wyjściu wyprowadza grupę podstawową wielościanu. By to było możliwe musimy
wiedzieć, że grupa, która ma się znaleźć na wyjściu daje się opisać przy pomocy skończonego ciągu symboli.
98
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Nie z każdą grupą da się to zrobić, ale okazuje się, że w przypadku grupy podstawowej wielościanu jest to
możliwe, między innymi za sprawą tw. 6.2.22, z którego wynika, że obliczenie grupy podstawowej spójnego
wielościaniu sprowadza się do policzenia jego grupy krawędziowej.
Elementy grupy krawędziowej są skończonymi ciągami skończonego zbioru wierzchołków wielościanu.
Są więc one, w przeciwieństwie do elementów grupy podstawowej, obiektami kombinatorycznymi, to znaczy
dają się zapisać przy pomocy skończonego ciągu symboli. Jednakże samych tych ciągów jest nieskończenie
wiele, nie wchodzi więc w rachubę wypisanie wszystkich, a tym bardziej wypisanie wyników działania
w grupie dla wszystkich możliwych elementów grupy. Jest to możliwe tylko dla grup skończonych. Jeśli
jednak każdy element grupy ma skończony opis (kod), to za opis grupy można przyjąć podanie algorytmu,
który na podstwie kodów elementów wyznacza kod wyniku działania grupowego na tych elementach.
By rozwinąć tę ideę musimy przyjrzeć się bliżej pewnym typom grup.
6.3.1
Grupy wolne, skończenie generowane
Niech S będzie ustalonym zbiorem skończonym, którego elementy nazywać będziemy symbolami. Połóżmy
S ∗ := S × {−1, 1}. Parę (s, 1) utożsamiać będziemy z symbolem s ∈ S, natomiast parę (s, −1) oznaczać
będziemy s−1 i określać mianem symbolu odwrotnego do S. Słowem nad S ∗ nazywamy dowolny skończony
ciąg symboli z S ∗ . Słowo, w którym występują obok siebie symbole s i s−1 można zredukować poprzez
opuszczenie tej pary symboli. Powiemy, że słowo jest zredukowane, jeżeli nie można go zredukować. Konkatenacją słów a i b jest słowo, które powstaje przez wypiasnie najpierw symboli słowa a, a potem symboli
słowa b. Konkatenacją zredukowaną jest konkatenacja, w której wykonano wszystkie możliwe redukcje.
Twierdzenie 6.3.1 Zbiór słów zredukowanych nad S ∗ wraz z działaniem konkatenacji zredukowanej
tworzy grupę. Elementem neutralnym tej grupy jest słowo puste. Elementem odwrotnym do słowa a
jest słowo powstałe przez wypisanie symboli słowa a w odwrotnej kolejności wraz z zamianą symbolu
s ∈ S na s−1 , a s−1 na s. Zbiór słów jednoelementowych s, gdzie s ∈ S stanowi bazę tej grupy.
Grupę, o której mowa w tw. 6.3.1 nazywamy grupą wolną rozpiętą na zbiorze symboli S i oznaczamy
FS .
Uwaga 6.3.2 Grupa FS jest przemienna wtedy i tylko wtedy gdy zbiór S jest jednoelementowy.
Dowód: ćwiczenie.
Ponieważ elementy grupy wolnej rozpiętej na zbiorze symboli S są słowami, więc mają skończony
opis. Nietrudno też podać algorytm, który dla dwóch słów zredukowanych wyznacza ich zredukowaną
konkatenację. Zatem grupę wolną rozpiętą na zbiorze symboli można uznać za obiekt kombinatoryczny,
który może się znaleźć na wyjściu algorytmu.
6.3. OBLICZANIE GRUPY PODSTAWOWEJ
99
Twierdzenie 6.3.3 Jeśli A jest bazą grupy G, to G jest izomorficzna z grupą wolną rozpiętą na
zbiorze A.
Dowód: Pomijamy.
Ze względu na tw. 6.3.3 grupę, dla której potrafimy wskazać bazę możemy też uznać za obiekt kombinatoryczny. Grupę, która posiada bazę nazywamy grupą wolną.
Twierdzenie 6.3.4 Dwie grupy wolne są izomorficzne wtedy i tylko wtedy gdy posiadają równoliczne
bazy.
Dowód: Pomijamy.
Opis grupy wolnej wystarczy ograniczyć do podania liczby generatorów, gdyż ze względu na tw. 6.3.4
wystarcza to do odtworzenia tej grupy z dokładnością do izomorfizmu.
Jeśli grupa G nie jest wolna, ale ma skończony układ generatorów A, to na mocy definicji grupy wolnej
odwzorowanie włożenia A ,→ G rozszerza się do homomorfizmu grup α : FA → G, o którym można
pokazać, że jest epimorfizmem, a odwzorowanie indukowane ᾱ : FA / ker α → G izomorfizmem. W takim
przypadku grupa ker α też jest skończenie generowana. Skończony opis grupy G możemy więc uzyskać
podając obok układu generatorów A również zbiór R taki, że ker α ⊂ FA jest podgrupą normalną FA
generowaną przez R, tj. <RG> = ker α.
Elementy R nazywamy relatorami. Przyjmujemy oznaczenie
<A|R> := FA /<RG>
na oznaczenie grupy ilorazowej powstałej z podzielenia grupy wolnej generowanej przez zbiór A przez
podgrupę normalną generowaną przez relatory.
Na relatory wygodnie jest patrzeć następująco. Jeśli s jest słowem zredukowanym w FA , a r jest
relatorem, który jest podsłowem w słowie s, to usuwając r z s dostajemy słowo równoważne słowu s w
sensie relacji zadanej przez <RG>.
Ćwiczenie 6.3.5 Pokazać, że grupa <a | a2> jest izomorficzna z grupą Z2 .
Ćwiczenie 6.3.6 Pokazać, że grupa <a, b | aba−1 b−1> jest izomorficzna z grupą Z ⊕ Z.
Ćwiczenie 6.3.7 (trudne) Pokazać, że grupy <a, b | a2 b2> i <a, b | abab−1> są izomorficzne.
100
6.3.2
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Obliczanie grupy krawędziowej
Mówimy, że kompleks symplicjalny jest drzewem, jeżeli jest spójny, jest zbudowany wyłącznie z wierzchołków i krawędzi, a każda jego pętla krawędziowa jest krawędziowo homotopijna z pętlą jednoelementową.
Twierdzenie 6.3.8 W każdym kompleksie symplicjalnym S o bryle spójnej istnieje podkompleks
będący drzewem, które zawiera wszystkie wierzchołki kompleksu S.
Dowód: ćwiczenie.
Dla każdej drogi krawędziowej postaci vw, gdzie hv, wi ∈ S 1 , ustalmy jednoznacznie pewien symbol
gvw . Niech G(S 1 ) oznacza zbiór tych symboli.
Niech T będzie drzewem w S zawierającym wszystkie jego wierzchołki. W grupie wolnej FG(S 1 ) rozpiętej
na zbiorze symboli G(S 1 ) rozważmy następujący zbiór relatorów
−1
| conv { u, v, w } ∈ S }.
R := { guw | conv { u, w } ∈ T } ∪ { guv gvw guw
(6.7)
Twierdzenie 6.3.9 Grupa <FG(S 1 ) |R> jest izomorficzna z grupą π(S, x0 ).
Szkic dowodu: Przede wszystkim zauważmy, że biorąc w (6.7) u = w dostajemy
[guu ] = 1,
[guv gvu ] = 1,
zatem w szczególności
[guv ] = [gvu ]−1 .
Ponieważ T jest spójny i zawiera wszystkie wierzchołki kompleksu S, więc dla każdego wierzchołka
v ∈ S istnieje droga krawędziowa w T łącząca v z wierzchołkiem x0 . Dla każdego v ∈ S ustalmy jakąś taką
drogę dv . Dla każdej krawędzi hu, vi mamy dobrze określoną pętlę krawędziową puv := du uvd−1
v będącą
−1
złożeniem dróg du , uv i dv . Zgodnie z definicją grupy wolnej odwzorowanie
G(S 1 ) 3 guv 7→ [puv ] ∈ π1 (S, x0 )
rozszerza się do homomorfizmu grup ψ : FG(S 1 ) → π1 (S, x0 ). Pokażemy, że ψ jest epimorfizmem. Niech
v0 v1 · · · vn będzie pętlą krawędziową w S zaczepioną w x0 . Łatwo sprawdzić, że pętla ta jest krawędziowo
homotopijna z pętlą pv0 v1 pv1 v2 · · · pvn−1 vn . Zatem
[v0 v1 · · · vn ] = [pv0 v1 pv1 v2 · · · pvn−1 vn ] = [pv0 v1 ][pv1 v2 ] · · · [pvn−1 vn ] = ψ(gv0 v1 gv1 v2 · · · gvn−1 vn )
co dowodzi, że ψ jest epimorfizmem. Pokażemy z kolei, że <RG> ⊂ ker ψ, gdzie R dane jest wzorem (6.7).
Dla hu, vi ∈ T 1
ψ(guv ) = [puv ] = [du uvd−1
v ] = [x0 ],
101
6.3. OBLICZANIE GRUPY PODSTAWOWEJ
bo du uvd−1
v jest drogą krawędziową w T , zatem jest ona krawędziowo homotopijna z drogą jednoelementową x0 , której klasa równoważności jest elementem neutralnym w π1 (S, x0 ). Podobnie dla hu, v, wi ∈ S 2
−1
−1
−1
−1 −1
ψ(guv gvw guw
) = [puv pvw p−1
uw ] = [du uvdv dv vwdw (du uwdw ) ] =
−1
−1
−1
[du uvvwd−1
w dw wudu ] = [du uvwdu ] = [du du ] = [x0 ].
Zatem R ⊂ ker ψ. Jeśli r ∈ R i g ∈ G, to
ψ(g −1 rg) = ψ(g −1 )ψ(r)ψ(g) = ψ(g −1 )ψ(g) = ψ(g −1 g) = ψ(e) = [x0 ],
a więc również RG ⊂ ker ψ, skąd natychmiast wynika, że <RG> ⊂ ker ψ. Mamy zatem indukowany
epimorfizm
ψ̄ : <FG(S 1 ) |R> → π(S, x0 ).
Aby pokazać, że ψ̄ jest monomorfizmem zdefiniujmy odwzorowanie
λ : π(S, x0 ) 3 [v0 v1 · · · vn ] 7→
1
[gv v gv v · · · gv v ]
0 1
1 2
n−1 n
gdy n = 0,
∈ <FG(S 1 ) |R> gdy n > 0.
Odwzorowanie to jest dobrze określonym homomorfizmem grup. Co więcej
−1
λψ([guv ]) = λ([puv ]) = λ([du uvd−1
v ]) = λ([du ])λ([uv])λ([dv ]) = [guv ],
bo [du ] = [x0 ] = [d−1
v ]. Zatem λψ = idFG(S 1 ) , skąd
ψ([w1 ]) = ψ([w2 ]) ⇒ [w1 ] = λ(ψ([w1 ])) = λ(ψ([w2 ]) = [w2 ],
a więc ψ jest monomorfizmem, a tym samym izomorfizmem.
6.3.3
Grupa podstawowa okręgu.
Wniosek 6.3.10 Grupa podstawowa okręgu jest izomorficzna z grupą liczb całkowitych
Dowód: Okrąg jest homeomorficzny z brzegiem trójkąta, wystarczy więc policzyć grupę podstawową
trójkąta. Oznaczmy wierzchołki trójkąta literami A, B, C. Podkompleks zbudowany z krawędzi AB i AC
jest drzewem i zawiera wszystkie wierzchołki trójkąta. Wśród relatorów mamy zatem i są to wszystkie
relatory, bo brzeg trójkąta ABC nie zawiera pełnych trójkątów. Grupa fundamentalna okręgu zbudowana
jest więc ze słów zredukowanych na trzech symbolach c := gAB , b := gAC , a := gBC , z których b i
c utożsamiamy z elementem neutralnym. Tak więc zostają wyłącznie słowa zbudowane z symbolu a, a
więc słowa postaci an , gdzie n jest liczbą całkowitą. Grupa takich słów jest izomorficzna z grupą liczb
całkowitych, bo izomorfizmem jest odwzorowanie n 7→ an .
W poniższych ćwiczeniach należy posłużyć się metodą liczenia grupy podstawowej zaproponowaną we
wniosku 6.3.10.
102
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Ćwiczenie 6.3.11 Pokazać, że grupą podstawową dwuwymiarowej sfery S2 jest grupa zerowa.
Ćwiczenie 6.3.12 Obliczyć grupę podstawową zbioru zbudowanego z dwóch okręgów sklejonych w
jednym punkcie. Pokazać, że grupa ta nie jest przemienna.
Ćwiczenie 6.3.13 (żmudne) Pokazać, że grupą podstawową torusa T jest
π1 (T) = Z ⊕ Z.
Wskazówka: wykorzystać ćw. 6.3.6.
Ćwiczenie 6.3.14 (trudne) W oparciu o tw. 6.3.8 i tw. 6.7 naszkicować algorytm wyznaczania
grupy podstawowej (generatorów i relatorów) bryły kompleksu symplicjalnego.
Ćwiczenie 6.3.15 (żmudne i trudne) Pokazać, że grupą podstawową butelki Kleina K jest
π1 (K) = <a, b | abab−1>.
Ćwiczenie 6.3.16 (żmudne i jeszcze trudniejsze) Pokazać, że grupą podstawową przestrzeni
rzutowej P jest
π1 (P) = <a | a2>.
Ćwiczenie 6.3.17 Wywnioskować z powyższych ćwiczeń, że żadne z par przestrzeni S2 i T, S2 i K,
S2 i P, T i P nie są homeomorficzne.
6.4
Homologie symplicjalne nad Z2
Wyniki poprzedniego rozdziału pokazują, że przynajmniej w pewnym stopniu problem odróżniania przestrzeni topologicznych da się zalgorytmizować. Niestety, postać grupy, którą dostajemy na wyjściu jest
w prawdzie skończony (musi być), jednak nie jest jednoznaczny, bo ta sama grupa może mieć dwa różne
przedstawienia (por. ćw. 6.3.7). Co więcej, wiadomo, że nie istnieje algorytm rozstrzygający w dowolnej
sytuacji, czy dwa takie przedstawienia są izomorficzne. Oczywiście w konkretnych sytuacjach zawsze można próbować udowodnić, że przedstawienia nie są izomorficzne i czasami się to udaje. Do algorytmizacji
badania przestrzeni topologicznych przdyałby się jednak taki niezmiennik, o którym automatycznie można
byłoby rozstrzygać czy jest ten sam czy inny. Takim narzędziem są grupy homologii.
103
6.4. HOMOLOGIE SYMPLICJALNE NAD Z2
6.4.1
Łańcuchy, cykle i brzegi
Niech S będzie kompleksem symplicjalnym. Niech
Cn (S; Z2 ) := { f : S n → Z2 }
oznacza zbiór funkcji ze zbioru n-sympleksów kompleksu S n do zbioru Z2 z działaniem przypisującym
funkcjom f, g ∈ Cn (S; Z2 ) funkcję f + g ∈ Cn (S; Z2 ) daną wzorem
(f + g)(x) := (f (x) + g(x)) % 2.
Zbiór Cn (S; Z2 ) z tym działaniem jest grupą przemienną. Nazywamy ją grupą n-łańcuchów kompleksu
S o współczynnikach z Z2 . Jeśli potraktujemy Z2 jako ciało, to grupa ta jest równocześnie przestrzenią
wektorową nad ciałem Z2 z mnożeniem
Z2 × Cn (S; Z2 ) 3 (c, f ) 7→
f
0
gdy c = 1,
gdy c = 0.
Jak każda przestrzeń wektorowa ma ona bazę. Tzw. bazę kanoniczną stanowią wtedy łańcuchy elementarne, czyli funkcje postaci { Sb | S ∈ S n }, gdzie
1
T = S,
Sb : S n 3 T 7→
0 T 6= S.
Dla n przy których S n = ∅ (dla wygody również dla n ujemnych) przyjmujemy Cn (S; Z2 ) := 0.
Dla S = hv0 , v1 , . . . , vn i kładziemy
b =
∂n (S)
n
X
hv0 , v1 , . . . , vbi , . . . , vn i,
(6.8)
i=0
gdzie hv0 , v1 , . . . , vbi , . . . , vn i oznacza sympleks rozpięty na wszystkich wierzchołkach v0 , v1 , . . . , vn z wyjątkiem wierzchołka vi . Ponieważ Cn (S; Z2 ) jest przestrzenią wektorową nad Z2 , definicja (6.8) rozszerza się
liniowo na wszystkie łańcuchy. W efekcie dostajemy homomorfizm
∂n : Cn (S; Z2 ) → Cn−1 (S; Z2 ).
zwany homomorfizmem brzegu.
Jądro homomorfizmu ∂n nazywamy grupą n-cykli i oznaczamy Zn (S; Z2 ) := ker ∂n . Obraz homomorfizmu ∂n+1 nazywamy grupą n-brzegów i oznaczamy Bn (S; Z2 ) := im ∂n+1 .
104
6.4.2
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Grupy homologii
Mamy następujący lemat.
Lemat 6.4.1 Dla wszystkich n zachodzi ∂n−1 ∂n = 0.
Dowód: Dla dowolnego sympleksu S = hv0 , v1 , . . . , vn i mamy
∂n−1 ∂n
b
(S)
=
n
XX
\
conv (V
\ {vi , vj }).
j6=i i=0
Ponieważ w powyższej sumie każda (n − 1)-ściana S pojawia się dokładnie dwa razy, ze względu na
sumowanie modulo 2 otrzymujemy zero.
Jako natychmiastowy wniosek otrzymujemy
Wniosek 6.4.2
Bn (S; Z2 ) ⊂ Zn (S; Z2 ).
Definicja 6.4.3 Przestrzeń ilorazową
Hn (S; Z2 ) := Zn (S; Z2 )/Bn (S; Z2 )
n-tą grupą homologii kompleksu symplicjalnego S o współczynnikach z Z2 .
Twierdzenie 6.4.4 Dwa kompleksy symplicjalne o homotopijnych bryłach mają izomorficzne grupy
homologii. W szczególności grupy homologii wielościanu zależą jedynie od jego bryły, a nie od konkretnego kompleksu symplicjalnego użytego do jego reprezentacji, agrupy homologii są niezmiennikami
topologicznymi.
Dowód: Pomijamy.
2
Powyższe twierdzenie pokazuje, że jest sens mówić o grupach homologii nad Z wielościanu, a także
wszystkich przestrzeni homeomorficznych z wielościanem.
105
6.4. HOMOLOGIE SYMPLICJALNE NAD Z2
Przykład 6.4.5 Policzymy grupy homologii nad Z2 dla okręgu S1 . Niech A, B, C będą punktami afinicznie niezależnymi. Niech kompleks symplicjalny S składa się z sympleksów hA, Bi, hA, Ci, hB, Ci
i ich ścian. Bryła takiego kompleksu jest homeomorficzna z S1 , wystarczy więc policzyć jego homologie. Dla uproszczenia notacji będziemy opuszczać nawiasy i przecinki pisząc sympleksy, więc np.
AB to skrót od hA, Bi. Przy łańcuchach elementarnych będziemy też pomijać daszki. Mamy
C0 (S; Z2 ) = { 0, A, B, C, A + B, A + C, B + C, A + B + C },
C1 (S; Z2 ) = { 0, AB, AC, BC, AB + AC, AB + BC, AC + BC, AB + AC + BC },
a pozostałe grupy są zerowe. Jedynym niezerowym homomrofizmem brzegu jest ∂1 . Ma on macierz,
przy leksykograficznym uporządkowaniu baz kanonicznych
1 1 0
1 0 1 .
0 1 1
Wynika stąd, że
Z0 (S; Z2 ) = C0 (S; Z2 ),
B0 (S; Z2 ) = { 0, A + B, A + C, B + C },
Z1 (S; Z2 ) = { 0, AB + AC + BC },
a pozostałe grupy cykli i brzegów są zerowe. Zatem dostajemy
H0 (S; Z2 ) = { [0], [A] },
H1 (S; Z2 ) = { [0], [AB + AC + BC] },
a więc
Hn (S1 ; Z2 ) =
6.4.3
Z
2
0
dla n = 0 i n = 1,
w pozostałych przypadkach.
Algorytm wyznaczania grup homologii nad Z2
Jak wiemy, dwie przestrzenie wektorowe skończenie wymiarowe są izomorficzne wtedy i tylko wtedy gdy
mają ten sam wymiar. Tak więc, w przeciwieństwie do grup, stwierdzenie czy dwie przestrzenie wektorowe
są izomorficzne czy nie jest problemem rozstrzygalnym. Z tego powodu najbardziej w grupach homologii
interesuje nas ich wymiar.
Definicja 6.4.6 Wymiar przestrzeni Hn (S; Z2 ) nazywamy n-tą liczbą Bettiego nad Z2 kompleksu S
i oznaczamy βn (S; Z2 ).
106
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Niech rn (S; Z2 ) := dim Bn−1 (S; Z2 ). Ponieważ rząd macierzy, to wymiar obrazu odwzorowania liniowego zadanego macierzą, więc rn (S; Z2 ) to rząd macierzy ∂n .
Twierdzenie 6.4.7 Liczbę Bettiego kompleksu S można wyliczyć ze wzoru
βn (S; Z2 ) = card S n − rn (S; Z2 ) − rn+1 (S; Z2 ).
(6.9)
Dowód: Wymiar przestrzeni ilorazowej to różnica wymiarów dzielnej i dzielnika, zatem
βn (S; Z2 ) = dim Hn (S; Z2 ) = dim Zn (S; Z2 ) − dim Bn (S; Z2 ).
Standardowy wynik z algebry liniowej dla odwzorowań liniowych w odniesiemiu do homomorfizmu ∂n to
dim dom ∂n = dim ker ∂n + dim im ∂n ,
skąd
dim Zn (S; Z2 ) = dim ker ∂n = dim dom ∂n − dim im ∂n .
Ale dom ∂n = Cn (S; Z2 ), zatem dim dom ∂n = card S n . Z kolei dim im ∂n = dim Bn−1 (S; Z2 ) = rn (S; Z2 ),
a dim Bn (S; Z2 ) = rn+1 (S; Z2 ). Zatem
dim Zn (S; Z2 ) − dim Bn (S; Z2 ) = card S n − rn (S; Z2 ) − rn+1 (S; Z2 )
i teza wynika z (6.9).
Z tw. 6.4.7 wynika, że aby skonstruować algorytm liczący liczby Bettiego (a w konsekwencji grupy
homologii) nad Z2 kompleksu symplicjalnego S wystarczy
(i) policzyć ilość sympleksów w poszczególnych wymiarach
(ii) wygenerować macierze homomorfizmu brzegu
(iii) policzyć rzędy tych macierzy.
Konstrukcja stosownych podalgorytmów realizujących punkty (i) oraz (ii) jest oczywista. Dowodzi się,
że rząd macierzy to w szczególności maksymalna ilość kolumn liniowo niezależnych.
Niech c będzie kolumną macierzy A. Indeksem wiodącym kolumny c nazywamy najmniejszy numer
wiersza, w którym kolumna c ma wartość niezerową jeśli kolumna jest niezerowa, a nieskończoność, jeśli
kolumna jest zerowa. Mówimy, że macierz jest w postaci kolumnowo eszelonowej, jeżeli indeksy wiodące
kolejnych kolumn stanowią funkcję rosnącą numerów kolumn, która jest silnie rosnąca dla kolumn niezerowych. Tak więc, jeśli macierz A jest w postaci kolumnowo eszelonowej, to wszystkie jej zerowe kolumny są
na prawo od kolumn niezerowych, a indeks wiodący j-tej niezerowej kolumny jest silnie większy niż indeks
wiodący (j − 1)-szej kolumny. Łatwo stwierdzić, że jeśli macierz jest w postaci kolumnowo eszelonowej, to
jej wszystkie kolumny niezerowe są liniowo niezależne, a więc jej rząd, to ilość niezerowych kolumn.
Okazuje się, że każdą macierz można przekształcić do macierzy w postaci kolumnowo eszelonowej nie
zmieniając jej rzędu. Niech cj oznacza jej j-tą kolumnę macierzy A. Następujące dwie operacje (tzw.
operacje elementarne) nie zmieniają rzędu macierzy.
107
6.4. HOMOLOGIE SYMPLICJALNE NAD Z2
(r1) Przestawienie kolumn ci i cj .
(r2) Zastąpienie kolumny cj sumą kolumn cj i ci .
Łatwo zobaczyć, że te dwie operacje elementarne pozwalają każdą macierz o współczynnikach z Z2 sprowadzić do postaci kolumnowo-eszelonowej. Jeśli macierz jest zerowa, to już jest w żądanej postaci. Jeśli
nie jest, wybieramy jakąkolwiek kolumnę o najmniejszym indeksie wiodącym i stosując (r1) przestawiamy
ją z pierwszą kolumną. Nastęnie stosując (r2) dodajemy pierwszą kolumnę do wszystkich kolumn, które
mają ten sam indeks wiodący. Ponieważ dodawanie jest modulo 2, indeksy wiodące wszystkich kolumn
poza pierwszą wzrastają. Teraz rekurencyjnie uruchamiamy ten sam proces w odniesieniu do podmacierzy
powstałej z pominięcia pierwszego wiersza i pierwszej kolumny.
Przykład 6.4.8 W przypadku macierzy z przykładu 6.4.5 sprowadzenie macierzy odwzorowania ∂1
do postaci kolumnowo-eszelonowej odbywa się w dwóch krokach i wymaga jedynie operacji (r2). W
pierwszym kroku do kolumny drugiej dodajemy pierwszą, a w drugim do trzeciej drugą:
1 1 0
1 0 1
0 1 1
1 0 0
→ 1 1 1
0 1 1
1 0 0
→ 1 1 0 .
0 1 0
Zatem rząd macierzy odwzorowania ∂1 to 2, a dla pozostałych macierzy brzegu wynosi zero. Ponieważ
kompleks S w przykładzie 6.4.5 składa się z trzech krawędzi i trzech wierzchołków, ze wzoru (6.9)
wyliczamy, że
β0 (S; Z2 ) = 3 − 0 − 2 = 1
β1 (S; Z2 ) = 3 − 2 − 0 = 1
co zgadza się z policzonymi w tym przykładzie grupami homologii.
Ćwiczenie 6.4.9 Pokazać, że grupy homologii nad Z2 sfery S2 wynoszą
Z
Hn (S2 ; Z2 ) =
2
0
dla n = 0 i n = 2,
w pozostałych przypadkach.
108
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Ćwiczenie 6.4.10 (bardzo żmudne) Policzyć że grupy homologii nad Z2 torusa T, butelki Kleina
K i przestrzeni rzutowej P wynoszą
Hn (T; Z2 ) =
Z2
Z2
⊕ Z2
dla n = 0 i n = 2,
dla n = 1,
w pozostałych przypadkach.
⊕ Z2
dla n = 0 i n = 2,
dla n = 1,
w pozostałych przypadkach.
0
Hn (K; Z2 ) =
Z2
Z2
0
Hn (P; Z2 ) =
Z2
Z2
0
6.4.4
dla n = 0 i n = 2,
dla n = 1,
w pozostałych przypadkach.
Charakterystyka Eulera-Poincaré.
Niech S będzie kompleksem symplicjalnym. Charakterystyką Eulera-Poincaré kompleksu S nazywamy
liczbę
X
χ(S) :=
(−1)i card S i .
i∈Z
Twierdzenie 6.4.11 Charakterystyka Eulera-Poincaré kompleksu S jest sumą alternującą liczb Bettiego kompleksu S, a dokładniej
X
(−1)i βi (S i ).
(6.10)
χ(S) :=
i∈Z
W szczególności charakterystyka Eulera-Poincaré zależy jedynie od typu homotopii bryły kompleksu
symplicjalnego
Dowód: Ze wzoru (6.9) mamy
χ(S) =
(−1)i βi (S i ) =
(−1)i card S i −
(−1)i ri (S; Z2 ) −
(−1)i ri+1 (S; Z2 ) =
i∈Z
i∈Z
i∈Z
i∈Z
X
X
X
X
i
i
i
(−1) card S i −
(−1) ri (S; Z2 ) +
(−1) ri (S; Z2 ) =
(−1)i card S i .
i∈Z
i∈Z
i∈Z
i∈Z
X
X
X
X
Reszta tezy wynika bezpośrednio z tw. 6.4.4.
1
Dowód tw. 1.2.1: Brzeg wielościanu wypukłego jest homeomorficzny ze sferą S . Ściany wielościaniu
tworzą kompleks symplicjalny wymiaru dwa, w któym ilość wierzchołków, krawędzi i ścian to odpowiednio
V , E i F . Zatem z definicji charakterystyki Eulera mamy
χ(S1 ) = V − E + F.
109
6.5. HOMOLOGIE SYMPLICJALNE NAD Z.
Jednakże z ćw. 6.4.9 i ze wzoru (6.10) wnosimy, że
χ(S2 ) = 1 − 0 + 1 = 2,
co pokazuje, że
V − E + F = 2.
Ćwiczenie 6.4.12 Pokazać, że
χ(S1 )
χ(S2 )
χ(T)
χ(K)
χ(P)
6.5
=
=
=
=
=
0
2
0
0
1
Homologie symplicjalne nad Z.
(zawartość tego rozdziału jest nieobowiązkowa)
Dwa uporządkowania (v0 , v1 , . . . , vn ) i (vp0 , vp1 , . . . , vpn ) wierzchołków n-sympleksu S mają jednakową
orientację jeżeli jedno uporządkowanie można przekształcić w drugie poprzez parzystą liczbę transpozycji
sąsiednich elementów. Łatwo sprawdzić, że relacja ta jest relacją równoważności w zbiorze wszsytkich uporządkowań sympleksu S. Przez sympleks zorientowany σ = [v0 , v1 , . . . , vn ] rozumiemy klasę równoważności
uporządkowania (v0 , v1 , . . . , vn ) wierzchołków sympleksu S = hv0 , v1 , . . . , vn i. Jeśli S i T są sympleksami,
to odpowiadające im sympleksy zorientowane oznaczać będziemy odpowiednio przez σ i τ . Łatwo sprawdzić, że dla n > 0 każdy n-sympleks nma dokładnie dwie orientacje. Zatem o dwóch uporządkowaniach,
które nie są w tej samej klasie równoważności możemy mówić, że mają przeciwne orientacje. Pary przeciwnych orientacji oznaczać będziemy przez σ, sigma0 lub τ, τ 0 . Zorientowany kompleks symplicjalny to
kompleks symplicjalny, dla którego każdemu jego sympleksowi przypisano dokładnie jedną z jego dwóch
orientacji. Orientacje sympleksu i jego ścian nie są od siebie zależne i mogą być wybrane dowolnie.
Przykład 6.5.1 Niech S będzie trójkątem w R2 rozpiętym na wektorach v1 , v2 , v3 . Wtedy klasa orientacji zorientowanego sympleksu σ = [v1 , v2 , v3 ] zawiera uporządkowania (v1 , v2 , v3 ), (v2 , v3 , v1 ), (v3 , v1 , v2 ), a
orientacja przeciwna σ 0 zawiera uporządkowania (v1 , v3 , v2 ), (v2 , v1 , v3 ), (v3 , v2 , v1 ). W szczególności pierwsza klasa równoważności daje ruch przeciwny do kierunku ruchu wskazówek zegara, a druga zgodny z
kierunkiem ruchu wskazówek zegara. Niech S będzie kompleksem symplicjalnym składającym się z trójkąta S i wszystkich jego krawędzi i ścian. Oto przykładowe możliwe orientacje tego kompleksu
1. [v1 , v2 , v3 ], [v1 , v2 ], [v2 , v3 ], [v3 , v1 ];
110
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
v3
1
A
A
A
K
A
6A
A v2
v1 -
v3
2
A
A
AAK
6A
A v2
v1 -
v3
3
A
A
AAK
6 A
A v2
v1 -
Rysunek 6.1: Pzykładowe orientacje sympleksów w trójkącie.
2. [v1 , v2 , v3 ], [v1 , v2 ], [v2 , v3 ], [v1 , v3 ];
3. [v1 , v3 , v2 ], [v1 , v2 ], [v2 , v3 ], [v1 , v3 ].
Ich graficzne reprezentacje przedstawiono na rys. 6.1. Na pierwszy rzut oka drugi i trzeci przykład wydają
się złe, bo strzałki na krawędziach trójkąta nie układają się w cykl. Jednakże można to "naprawić" algebraicznie poprzez dodanie w odpowiednich miejscach znaku minus przy definicji homomorfizmu brzegu.
Niech teraz Sn oznacza zbiór zorientowanych n-sympleksów kompleksu S. Wolna grupa abelowa generowana przez Sn to zbiór funkcji o argumentach w Sn i wartościach w Z.
Definicja 6.5.2 Grupa n-łańcuchów, oznaczana Cn (S), to podgrupa grupy wszystkich funkcji z Sn
do Z, które spełniają równość
c(σ) = −c(σ 0 )
dla wszystkich par (σ, σ 0 ) przeciwnie orientacji tego samego sympleksu s. Ponadto kładziemy
Cn (S) := 0 jeżeli S nie zawiera n-sympleksów.
Uwaga 6.5.3 Grupa Cn (S) jest wolną grupą
wzorem
1
σ̃(τ ) := −1
0
abelową generowaną przez funkcje σ̃ = σb − σb0 dane
if τ = σ,
if τ = σ 0 ,
w przeciwnym razie,
gdzie σ, σ 0 , τ ∈ Sn , a σ, σ 0 są przeciwnymi orientacjami tego samego symplekss. Ten zbiór generatorów
nie stanowi bazy, ponieważ σ̃ 0 = −σ̃ dla dowolnej pary σ, σ 0 . Bazę można otrzymać poprzez wybór σ̃
z każdej pary sympleksów zorientowanych o przeciwnych orientacjach.
Wybór bazy w uwadze 6.5.3 jest związany z wyborem orientacji w S. Nasza notacja stała się dość
skomplikowana. By ją uprościć, znak˜będziemy pomijać identyfikując łańcuch elementarny σ̃ generowany
6.5. HOMOLOGIE SYMPLICJALNE NAD Z.
111
z sympleksem σ, a łańcuch −σ z łańcuchem σ 0 . Przy takiej konwencji simplicjalny operator brzegu ∂k :
Ck (S) → Ck−1 (S) możemy zdefiniować na elemencie bazowym [v0 , v1 , . . . , vn ] formułą
∂k [v0 , v1 , . . . , vn ] =
n
X
(−1)i [v0 , v1 , . . . , vi−1 , vi+1 , . . . , vn ].
(6.11)
i=0
Ćwiczenie 6.5.4 Sprawdzić, że symplicjalny operator brzegu jest poprawnie określony, tj. że definicja nie zależy od wyboru reprezentanta klasy [v0 , v1 , . . . , vn ].
Twierdzenie 6.5.5 ∂k−1 ∂k = 0.
Możemy teraz zdefiniować homologie kompleksu symplicjalnego S wzorem
H∗ (S) = {Hn (S)} = {ker ∂n / im ∂n+1 }.
Dowód: ćwiczenie.
Ćwiczenie 6.5.6 Policzyć homologie reprezentacji torusa (przykład 5.1.15).
6.5.1
Algorytm wyznaczania grup homologii nad Z2
———- W edycji 2011/12 pomijamy ————–
Ćwiczenie 6.5.7 Pokazać, że grupy homologii nad Z sfery S2 wynoszą
Hn (S2 ; Z) =
Z
0
dla n = 0 i n = 2,
w pozostałych przypadkach.
112
ROZDZIAŁ 6. WPROWADZENIE W TOPOLOGIĘ ALGEBRAICZNĄ
Ćwiczenie 6.5.8 (bardzo żmudne) Policzyć że grupy homologii nad Z torusa T, butelki Kleina
K i przestrzeni rzutowej P wynoszą
Hn (T; Z) =
Z
Hn (K; Z) =
Z
Hn (P; Z) =
Z⊕Z
0
Z ⊕ Z2
0
Z
Z2
0
6.5.2
dla n = 0 i n = 2,
dla n = 1,
w pozostałych przypadkach.
dla n = 0,
dla n = 1,
w pozostałych przypadkach.
dla n = 0,
dla n = 1,
w pozostałych przypadkach.
Homomorfizm indukowany
———- W edycji 2011/12 pomijamy ————–
6.5.3
Twierdzenie Lefschetza o punkcie stałym.
———- W edycji 2011/12 pomijamy ————–
Bibliografia
[1] R. Duda, Wprowadzenie do topologii, cz. I i cz. II, PWN, Warszawa, 1986.
[2] R. Engelking, Topologia ogólna, PWN, Warszawa, 1975.
[3] M.J. Greenberg, Wykłady z topologii algebraicznej, PWN, Warszawa, 1980.
[4] K. Kuratowski, Wstęp do teorii mnogości i topologii, PWN, Warszawa, 1972.
[5] R. Engelking i K. Sieklucki, Geometria i topologia, Część II: Topologia, PWN, Warszawa, 1980.
113