Geodezja - jedna z nauk o Ziemi zajmująca się wyznaczaniem jej kształtu
i rozmiarów oraz sporządzaniem modelu matematycznego rzeczywistej bryły
ziemskiej (również wyznaczaniem kształtu i rozmiarów tej części powierzchni
Ziemi, która nie poddaje się modelowaniu), a także określaniem wzajemnego
położenia punktów na wyznaczonej powierzchni. Ostatnio zainteresowania
geodezji rozszerzyły się również na badania i pomiary deformacji powierzchni
Ziemi wywołanych przez ruchy płyt tektonicznych (ruchy kontynentów).
Sporządzenie modelu matematycznego polega na wyznaczeniu powierzchni
zamkniętej najbliższej rzeczywistym kształtom bryły ziemskiej i możliwej do
opisania równaniem matematycznym oraz na obliczeniu wartości liczbowych
parametrów tego równania. Do celów geodezji wykorzystuje się też
fotogrametrię i kartografię. Niektóre metody geodezji są obecnie stosowane do
pomiarów innych ciał niebieskich (np. w selenodezji do pomiarów Księżyca)
[1].
Geodezję można umownie podzielić na klasyczną i nowoczesną. Geodezję
klasyczną, obejmującą pomiary wykonywane na powierzchni Ziemi, dzieli się
zwyczajowo na geodezję wyższą i geodezję niższą. Geodezja wyższa zajmuje
się pomiarami większych obszarów, dla których niezbędne jest uwzględnienie
kulistego kształtu Ziemi, geodezja niższa - pomiarami lokalnymi, dla których
można przyjąć, że powierzchnia Ziemi jest płaska (w skład geodezji niższej
wchodzi topografia). Prace geodezyjne obejmują: pomiary współrzędnych
punktów na fizycznej powierzchni Ziemi metodami triangulacji, pomiary
wysokości tych punktów metodami niwelacji i tachymetrii, a także pomiary
grawimetryczne. Na podstawie uzyskanych wyników sporządza się model
powierzchni Ziemi, a materializację tej powierzchni stanowi sieć punktów
(zwaną osnową geodezyjną) o wyznaczonych współrzędnych geograficznych.
Metody geodezji klasycznej w ciągu wielowiekowego rozwoju osiągnęły
wysoki stopień dokładności, jednak nie zrealizowały swych głównych celów;
wykonanie pomiarów na obszarach całych kontynentów jest trudne, a dokładne
pomiary na powierzchni oceanów - niemożliwe; korzystając z tych metod nie
można utworzyć jednolitego układu współrzędnych dla całego globu.
Metody pomiaru w skali całego globu rozwinęła geodezja nowoczesna
wykorzystując sztuczne satelity Ziemi. Satelita może spełniać funkcję pasywną
lub aktywną. W pierwszym przypadku satelita stanowi ruchomy cel
obserwowany z kilku odległych punktów naziemnych, a mierzone za pomocą
dalmierzy (np. laserowych) odległości do satelity umożliwiają zbudowanie sieci
punktów i wyznaczenie ich współrzędnych na obszarze całego globu. Do grupy
pasywnych satelitów geodezyjnych należą: Lageos, Starlette, Etalon. Satelity
aktywne zawierają skomplikowaną aparaturę elektroniczną i emitują specjalne
sygnały, które są odbierane i przetwarzane przez stacje naziemne, co pozwala na
wyznaczenie ich pozycji względem Ziemi. Urządzenia naziemne odbierają
sygnały równocześnie od kilku satelitów i na podstawie zawartych w nich
informacji o pozycji satelity oraz pomiaru jego odległości od punktu
naziemnego lub przesunięcia fazy sygnału, wyznaczają z dużą dokładnością
współrzędne tego punktu naziemnego. Do grupy satelitów aktywnych zalicza się
satelity systemów GPS, GLONASS, TRANSIT (wychodzący z użycia).
Systemy te pozwalają na dokładne wyznaczanie dużych odległości (np. między
kontynentami) i na międzykontynentalne łączenie sieci triangulacyjnych.
Na podstawie pomiarów satelitarnych wyznacza się także geoidę na poziomie
mórz i oceanów (altimetria satelitarna). Sądzi się, że inne bardziej
skomplikowane metody satelitarne, np. gradiometria satelitarna czy śledzenie
ruchu satelity przez satelitę (ang. satellite to satellite tracking) pozwolą
w przyszłości wyznaczyć geoidę także na poziomie lądów [1].
Geodezja jest jedną z najstarszych nauk. Tezę o kulistym kształcie Ziemi
przypisuje się filozofowi Pitagorasowi (VI wiek p.n.e.). W III wieku p.n.e.
Eratostenes z Cyreny wyznaczył długość południka ziemskiego, tworząc metodę
zwaną pomiarem stopnia. W 1615–17 matematyk i geodeta Snell van Royen
opracacował nową metodę pomiarów geodezyjnych, zwaną triangulacją. W
1687 I. Newton ogłosił teorię o elipsoidalnym kształcie Ziemi i o spłaszczeniu
jej na biegunach, co potwierdziły pomiary łuków południków w Peru (1735–44,
P. Bouguer) i Laponii (1736–37, A.C. Clairaut, P.L.M. de Maupertuis),
wykonane przez ekspedycje Akademi Nauk w Paryżu. W 1743 A.C. Clairaut
udowodnił możliwość wyznaczenia kształtu Ziemi na podstawie pomiarów
przyspieszenia ziemskiego i stworzył podstawy geodezji dynamicznej.
W 1792-98 pomiary łuku południka paryskiego od Dunkierki do Barcelony
(J.B.J. Delambre, P.F.A. Mechain) stały się podstawą wyznaczenia jednostki
miary zw. metrem. W 1873 matematyk niemiecki J. Listing wprowadził pojęcie
geoidy. W XIX i XX w. elementy elipsoidy ziemskiej wyznaczyli m.in. F.W.
Bessel, F.W. Clarke, F.R. Helmert, J.F. Hayford, F.N. Krasowski. W latach 60.
XX w. rozpoczął się rozwój geodezji nowoczesnej, która oprócz pomiarów
naziemnych wykorzystuje pomiary satelitarne o zasięgu całego globu [1].
Jednym z działów geodezji jest topografia, która zajmuje się pomiarami
rzeźby terenu i rozmieszczeniem różnych obiektów na powierzchni Ziemi
w celu sporządzania map topograficznych i ich uaktualniania. Obejmuje
podstawowe wiadomości o terenie, mapie, zdjęciach lotniczych
i fotointerpretacji, opisy przyrządów i sposoby ich stosowania przy pomiarach
terenowych, metody wykonywania i unowocześniania map topograficznych.
Topografia korzysta z takich metod, jak triangulacja czy niwelacja. Efektem
końcowym jest mapa topograficzna, wykorzystywana w różnych działach
gospodarki (planowanie przestrzenne, turystyka). Jest to także zespół cech
charakterystycznych dla danego terenu, które można zmierzyć przy pomocy
terenowych badań topograficznych, są to m.in.: hydrografia, zabudowa i drogi.
Termin topografia powierzchni stosowany jest obecnie często i dotyczy
zazwyczaj SGP (struktura geometryczna powierzchni) w ujęciu
trójwymiarowym [2].
Metody pomiaru SGP dzielą się na: profilowe i profilaktyczne. Metody
parametryczne pozwalają na uśrednianie konkretnego parametru z danego
fragmentu powierzchni. Metody profilowe polegają na zbieraniu danych
pomiarowych przez końcówkę pomiarową w określonych punktach profilu.
Trójwymiarowa wersja tej metody, zwana profilowaniem powierzchni polega
zazwyczaj na pomiarze równoległych profili. Profile powierzchni mogą być
reprezentowane przez prążki interferencyjne lub przez zbiór punktów
pomiarowych otrzymanych z użyciem końcówki stykowej lub niestylowej.
Pomiary stykowe stereometrii powierzchni zapewniające jej lepszą
reprezentację w porównaniu z poszczególnymi profilami są bardziej kosztowne,
czas zbierania danych jest dłuższy, dane zajmują większy obszar pamięci
komputera. Znacznie szybciej otrzymuje się informacje z wykorzystaniem
metod optycznych. Metody parametryczne są szybkie, lecz reprezentują
statystyczne właściwości powierzchni. Przykładami są metody rozproszenia
światła lub promieni X, plamkowe, pneumatyczne, pojemnościowe. Ze względu
na szybkość pomiaru mogą być stosowane w kontroli jakości powierzchni. Inny
podział metod pomiaru nierówności obejmuje metody profilometryczne
i metody analizy powierzchniowej [2].
Metody profilometryczne wykorzystujące końcówki stykowe są najczęściej
i najdłużej stosowane (ok. 70 lat) w badaniach struktury geometrycznej
powierzchni. Pierwsze urządzenie, oparte na pomiarze igłą powstało
w Niemczech w 1929 r., a jego twórcą był Schmaltz, za pierwszy zaś
profilometr stykowy uważa się urządzenia Abbotta powstałe 1939 w USA.
W 1936 r. powstało pierwsze urządzenie pomiarowe Talysurf w Wielkiej
Brytanii [2].
METODY POMIARU STRUKTURY GEOMETRYCZNEJ
POWIERZCHNI.
Wyróżniamy różne rodzaje pomiarów
powierzchni, w skład których wchodzą:
1.
a)
b)
2.
a)
b)
c)
d)
e)
f)
g)
3.
a)
b)
c)
d)
METODY STYKOWE
pomiary profili nierówności
pomiary stereometrii powierzchni
METODY OPTYCZNE
metoda stylusa optycznego
metody interferencyjne
holografia optyczna
metoda przekroju świetlnego
metoda skaterometryczna
elipsometria
metody plamkowe
POZOSTAŁE METODY
metody elektryczne
metody mechaniczne
metody stykowe
metody pneumatyczne
struktury
geometrycznej
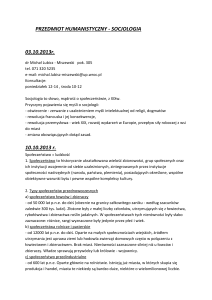
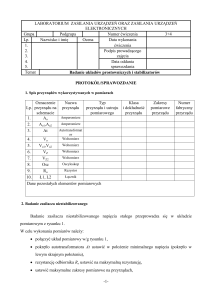
Ad 1. ZASADA POMIARU METODĄ STYKOWĄ
POMIARY PROFILI NIERÓWNOŚCI
Na rysunku 1 przedstawiono zasadę pomiaru profilu nierówności
powierzchni.
Rys. 1. Zasada pomiaru stykowego SGP powierzchni [2]
Głowica pomiarowa przyrządu przesuwa się wzdłuż mierzonego profilu ze
stałą prędkością. Ostrze odwzorowujące dzięki naciskowi pomiarowemu styka
się z powierzchnią mierzonego przedmiotu. Zmiany położenia ostrza
odwzorowującego w kierunku prostopadłym do kierunku przesuwu są
zamieniane w przetworniku na sygnał elektryczny. Sygnał ten może być
zarejestrowany lub poddany dalszemu opracowaniu. Baza pomiarowa może być
zależna lub niezależna. Baza niezależna występuje w głowicach bez ślizgacza.
Mierzone jest wtedy przemieszczenie igły pomiarowej względem powierzchni
bazy odniesienia. Niezależną bazę pomiarową mogą stanowić prowadnice
przyrządu. Układ pomiarowy może się też przemieszczać po niezależnej
powierzchni bazy odniesienia. Baza zależna występuje w głowicach
ze ślizgaczem jednopłozowym lub dwupłozowym. W przypadku długości
odcinaka elementarnego większej niż 2,5 mm lub równej 2,5 mm oraz
w pomiarach odpowiedzialnych należy stosować pomiar względem bazy
niezależnej [2].
Ślizgacze są punktem podparcia i jednocześnie powierzchnią odniesienia.
Rozwiązanie to zmniejsza zakłócenia mechaniczne mechanizmu posuwu.
Ponieważ punkt pomiarowy położony jest blisko bazy odniesienia (ślizgacza),
drgania ulegają redukcji.
Szczególnego podejścia wymagają pomiary chropowatości na
powierzchniach krzywoliniowych. Jedną z możliwości jest wówczas pomiar
podczas obrotowego ruchu przedmiotu lub głowicy pomiarowej. Odpowiednia
przystawka pełni wówczas funkcję mechanizmu posuwu.
Istnieją trzy podstawowe rodzaje mechanizmów posuwu: liniowy
z wewnętrzną płaszczyzną odniesienia (głowica bez ślizgacza lub ze
ślizgaczem), liniowy bez wewnętrznej płaszczyzny odniesienia (konstrukcja
mniejsza i tańsza głowica ze ślizgaczem) oraz obrotowy [2].
Do głowic pomiarowych zalicza się ostrze odwzorowujące, niekiedy
ślizgacz oraz przetwornik pomiarowy. Głowica spełnia dwa zadania. Po
pierwsze służy jako uchwyt końcówki pomiarowej, a po drugie ma przetwornik
zamieniający sygnał mechaniczny na elektryczny.
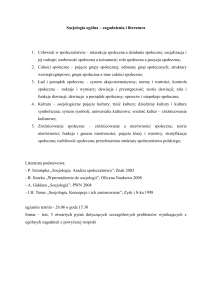
Ślizgacz został zastosowany po raz pierwszy przez J. Abbotta
w 1936 r. Idealną konfiguracją jest końcówka przechodząca przez ślizgacz
i analizująca ten sam obszar powierzchni (rys. 2). Wówczas końcówka i
ślizgacz analizują ten sam fragment powierzchni - nie występuje przesunięcie
fazowe. Symulacje komputerowe wskazują, że wysokość chropowatości w tym
przypadku może maleć. Jednak taki układ ma tendencję do zapychania się
i niewłaściwej pracy. Mogą też występować dwa ślizgacze, a końcówka
znajduje się pomiędzy nimi. Eliminuje to problem gromadzenia się
zanieczyszczeń. Ślizgacze umiejscowione po bokach igły zapewniają jej
prowadzenie równoległe do płaszczyzny osi powierzchni zakrzywionych .
Najczęściej stosuje się rozwiązanie pokazane na rys. 2b, gdzie ślizgacz
znajduje się na linii pomiaru (przed igłą lub za igłą). Wówczas dla powierzchni
losowych odległość między ślizgaczem i końcówką powinna być większa od
tzw. długości niezależnej, na której poszczególne rzędne profilu nie są
skorelowane. W urządzeniach firmy Taylor Hobson ślizgacz i igła nie działają
w tych samych przekrojach, lecz oddalonych o 0.1 mm, aby igła nie mierzyła
mikronierówności zniszczonej przez ślizgacz. W przypadku pokazanym
na rys. b występuje opóźnienie fazowe.
Ślizgacz może mieć dwa promienie zaokrąglenia, wówczas może się
opierać na wierzchołkach nieleżących na trasie igły, nie ma więc pojedynczego
przekroju wyznaczającego jego ruch. Gdy poprzeczny promień jest mniejszy od
wzdłużnego, przybliżenie ruchu jest bardziej wiarygodne. W przypadku
sferycznego zakończenia ślizgacza otrzymuje się informację ze śladu znacznej
szerokości.
Działanie filtrujące w przypadku ślizgacza płaskiego dotyczy fal większych
od długości ślizgacza. Ślizgacz powinien być stosowany, gdy znaczna długość
fali falistości nie jest istotna. Powierzchnia ślizgacza o dużej twardości jest
dokładnie wypolerowana.
Ślizgacz powinien się opierać na wierzchołkach powierzchni. Norma PNISO 3274: 1997 wymaga, aby promień krzywizny płozy ślizgacza
w płaszczyźnie pomiaru nie był mniejszy od 50 długości odcinka
elementarnego, a przy jednoczesnym stosowaniu dwóch ślizgaczy czynnych od 8 długości. Zgodnie z wymienioną normą nacisk ślizgacza na mierzoną
powierzchnię nie powinien być większy niż 0.5 N. Naciski na ślizgacz wynoszą
zazwyczaj 0.1-1.0 N. Najczęściej stosowane są ślizgacze z promieniem 50 mm
[2].
Rys. 2. Różne rozwiązania konfiguracji ślizgacz-końcówka pomiarowa [2].
Wpływ ślizgacza na dokładność pomiarów powierzchni losowych jest
zazwyczaj mniejszy niż powierzchni okresowych, pojawiają się trudności przy
pochyleniu profilu lub w przypadkach wyraźnej krzywizny. Ślizgacz powoduje
zniekształcenia powierzchni ze stopniami (schodkami) lub rysami, nie powinien
być stosowany do pomiaru małych obszarów. W praktyce problem odległości
pomiędzy końcówką pomiarową i ślizgaczem jest ważny dla powierzchni
periodycznych.
Opracowanie informacji pomiarowej
Przyrządy pomiarowe są zazwyczaj wyposażone w interfejsy,
umożliwiające przesłanie informacji pomiarowej do komputera. Filtry mają za
zadanie oddzielenie chropowatości od falistości. W starszych profilometrach
stosowano filtry elektryczne 2CR. Obecnie produkowane profilometry cyfrowe
stosują filtry cyfrowe.[2]
Sercem układu przetwarzania danych jest przetwornik analogowocyfrowy, zamieniający sygnał elektryczny na cyfrowy. Pierwszy etap
przekształcania postaci analogowej w cyfrową nazywa się próbkowaniem.
Ogólnie wzrost kroku próbkowania prowadzi do zwiększenia wartości
parametrów odstępu oraz zmniejszenia pochylenia profilu. Odstęp
dyskretyzacji można zwiększać w trakcie obróbki sygnału. Obecnie norma PNISO 4287/1996 precyzuje dobór kroku próbkowania. Natomiast sposób
reprezentacji wartości chwilowych sygnału analogowego przez liczby nazywa
się kwantyzacją lub kwantowaniem. Błąd kwantowania jest różnicą między
wartością analogową i najbliższym poziomem kwantowania. Rozdzielczość
pionowa cyfrowego przyrządu do pomiarów chropowatości powierzchni, czyli
najmniejsza wartość, jaką przyrząd może wyświetlić, zależy od zakresu
pomiarowego i dokładności przetwornika analogowo-cyfrowego. Ważne jest,
aby minimalizować niepewność przyrządu i zwiększyć rozdzielczość przez
dobranie najmniejszego zakresu pomiarowego, gdy przyrząd ma więcej niż
jeden zakres.
Maksymalna wysokość profilu powinna być znacznie większa od kroku
kwantyzacji, analizowane zaś cechy wzdłużne - większe od kroku próbkowania.
Norma ASME B46.l-l995 wymaga, aby odcinek pomiarowy zawierał co najmniej 8000 punktów [2].
POMIARY STEREOMETRII POWIERZCHNI
Wartości uzyskane z jednego przejścia końcówki pomiarowej mogą dawać
niepełne informacje co do natury powierzchni, analiza dwuwymiarowa może
być myląca i ograniczona w zastosowaniu. Dlatego ostatnio w publikacjach
naukowych dominują artykuły dotyczące analizy trójwymiarowej. Daje ona
pełniejszy obraz powierzchni.
Profilowanie powierzchni, najczęściej powszechnie stosowane, polega na
zbieraniu danych pomiarowych zazwyczaj we wzajemnie prostopadłych
kierunkach (skaning dwukierunkowy). Były też próby analizy kątowej. Polega
ona na pomiarze profili w różnych kierunkach wychodzących z tego samego
punktu, skręconych względem siebie o pewien kąt. Analiza kątowa ułatwia
oszacowanie kształtu szczytu, pomiar anizotropii powierzchni itd. Zaletą siatki
prostokątnej jest łatwość realizacji pomiarów, wadą zaś duży czas badań.
Stosowanie siatki trójkątnej i (lub) sześciokątnej (rys. 3) nie powoduje
znacznego skrócenia czasu pomiarów oraz wywołuje komplikacje sterowania
przyrządem. Inną możliwością jest próbkowanie oparte na zupełnie losowo
rozmieszczonych punktach. Analiza profilometryczna stosowana do
przedstawiania topografii powierzchni za pomocą urządzeń stykowych powstała
jako naturalne rozwinięcie oceny dwuwymiarowej do trójwymiarowej (rys. 4).
Pomiar stykowy pojedynczego profilu może być powtórzony wiele razy na
powierzchni w celu otrzymania mapy zawierającej równoległe profile [2].
Rys. 3. Schemat siatki a) prostokątnej b) trójkątnej c) sześciokątnej [2].
Generalnie, system do pomiarów stereometrii powierzchni składa się
z czterech głównych części:
- końcówki pomiarowej,
- translacyjnego stolika pomiarowego,
- systemu kontroli i sterowania,
- komputera.
Rys. 4. Schemat systemu do trójwymiarowej analizy powierzchni [2].
Ad 2. METODY OPTYCZNE (profilometryczne i parametryczne)
Istnieje różny podział metod optycznych. Przykładowo zespół prof. Stouta
dzieli je na metody do analizy powierzchni gładkich oraz do analizy
powierzchni z nierównościami różnej wysokości. Z kolei metody te podzielono
na statystyczne oraz konturowe. Metody optyczne podzielono na metody
profilometryczne i metody analizy powierzchniowej. Zasadniczym powodem
ograniczonego stosowania metod optycznych do pomiaru chropowatości jest
brak norm dotyczących tych metod, jak w przypadku pomiarów stykowych.
METODA STYLUSA OPTYCZNEGO
Do wad metod profilometrycznych należy zaliczyć m.in. wpływ geometrii
zakończenia końcówki pomiarowej na wyniki badań oraz możliwości
uszkodzenia badanej powierzchni. Aby uniknąć tych niedogodności,
zbudowano głowice optyczne, w których ostrze igły pomiarowej zastąpiono
zogniskowaną wiązką światła. Stosuje się je do powierzchni, w których styk z
końcówką jest niedopuszczalny (elementy miękkie, odkształcalne plastycznie,
twarde o ostrych krawędziach, powierzchnie niemożliwe do penetracji
końcówką stykową).
Urządzenia te działają na zasadzie, że końcówka optyczna śledzi geometrię
powierzchni, podobnie jak końcówka stykowa. Światło odbite od powierzchni
powraca przez obiektyw i jest kierowane na detektory fotoelektryczne
połączone z elektronicznym układem analizującym. Są to metody bezpośrednie,
nie wymagają założeń co do statystyki powierzchni. Są szczególnie przydatne
w badaniach powierzchni bardzo gładkich i nie nadają się do pomiaru
powierzchni silnie odbijających światło. W metodach opartych na
ogniskowaniu wiązki światła rozdzielczość pionowa jest rzędu nanometrów,
pozioma zaś jest określona przez rozmiar plamki światła. Zazwyczaj średnica
przewężenia zogniskowanej wiązki wynosi 0.5-2.0 m.
Większość metod bada czoło fali ogniska, tzn. jeden lub dwa punkty
ogniska. Metody oparte na badaniu dwóch punktów ogniska działają na
zasadzie interferencyjnego mikroskopu różnicowego.
Ogólnie istnieją dwa warianty metody jednego ogniska. W pierwszej, tzw.
metodzie rozogniskowania lub przeogniskowania, rzędne profilu wyznacza się
na podstawie analizy rozkładu natężenia światła w obrazie plamki świetlnej
widocznej na badanej powierzchni oraz na podstawie kształtu i położenia obrazu
tej plamki. Zachowuje się wówczas stałą odległość między obiektywem
ogniskującym wiązkę a bazą (układ sterowania otwartego).
Natomiast w drugim przypadku mierzy się wzajemne położenie układu
optycznego i powierzchni, przy którym ognisko pokrywa się z powierzchnią.
Zmiany odległości między obiektywem a bazą pomiarową są mierzone
za pomocą niezależnego układu. Stosuje się sterowanie ze sprzężeniem
zwrotnym, w układzie zamkniętym. Urządzenia działające wg drugiego
wariantu zwane są "podążaczami optycznymi".
Profilometry optyczne pracujące na zasadzie ogniskowania mogą stosować
światło niespójne lub spójne (laserowe), jednak druga możliwość poprawia rozdzielczość poprzeczną [5].
METODY INTERFERENCYJNE
Metody interferencyjne mogą służyć do analizy jakościowej powierzchni
lub do wyznaczania tylko niektórych parametrów. Ze względu na
rozpowszechnienie przyrządów interferencyjnych w trójwymiarowej analizie
powierzchni zostały przedstawione jako metody profilowe.
Interferencyjne pomiary nierówności powierzchni polegają na analizie
rozkładu fali świetlnej na powierzchni mierzonej. Metody interferencyjne dzielą
się na jakościowe (mikroskop polaryzacyjny), statystyczne - plamkowe
i interferometrię holograficzną, oraz bezpośredniego pomiaru z dalszym
podziałem na interferencję monochromatyczną i światła białego.
Do pomiarów chropowatości stosowane są mikrointerferometry
wykorzystujące efekt dwu- lub wielopromieniowej interferencji. W pierwszym
przypadku w zależności od tego, czy tylko jedna z nakładających się fal czy też
obydwie przechodzą przez badany przedmiot (lub odbijają się od niego),
rozróżnia się interferometry z falą odniesienia lub bez fali. W metodzie
dwupromieniowej z falą odniesienia wykorzystuje się efekt klina powietrznego,
np. stosując układ Twymana-Greena przez niewielkie odchylenie od
prostopadłości powierzchni mierzonej i odniesienia. Wykorzystuje się zjawisko
interferencji światła odbitego od mierzonej powierzchni oraz powierzchni
odniesienia o dużej refleksyjności i płaskości. Nierówności powierzchni
mierzone są widoczne w postaci deformacji prążków interferencyjnych.
Wysokość nierówności może być wyznaczana wizualnie przez porównanie
wartości deformacji prążków interferencyjnych i odstępu między sąsiednimi
prążkami. Klasyczne interferometry mają zazwyczaj wzrokową lub optyczną
interpolację wskazań. Dobre wyniki w pomiarach chropowatości daje
interferometr Linnka, będący odmianą interferometru Michelsona.
Stosowanie interferencji wielopromieniowej poprawia rozdzielczość,
pozwala uzyskać znacznie ostrzejszy obraz, np. w interferometrze Fabry'egoPerota. Wówczas mierzona powierzchnia powinna mieć dobre właściwości
refleksyjne (można ją też pokryć cienką warstwą o dobrych właściwościach
fleksyjnych). Metody oparte na tej zasadzie zapewniają rozdzielczość pionową
rzędu jednej setnej długości fali. Jednak wskutek wielokrotnego odbicia wiązki
od mierzonej powierzchni obraz zawiera uśrednione informacje o całej
powierzchni, dlatego interferometria wielopromieniowa stosowana jest głównie
do pomiarów struktury zdeterminowanej.
Interferometr wykorzystujący interferencję dwupromieniową zapewnia
rozdzielczość poziomą 1.0 m i pionową 0.01 m, natomiast wykorzystujący
interferencję wielopromieniową odpowiednio 2.5 m i 0.001 m. Wadą
interferometrów dwupromieniowych są trudności w dokładnym określeniu
odległości pomiędzy prążkami i wartości ich deformacji [5].
HOLOGRAFIA OPTYCZNA
Holografia - to rejestracja i rekonstrukcja powierzchni falowych. Proces
prowadzący do powstania obrazu holograficznego składa się z dwóch etapów.
W pierwszym na płycie fotograficznej rejestrowane jest pole świetlne, będące
wynikiem interferencji fal świetlnych zaburzonych przez holografowany obiekt
I fal przechodzących przezeń lub obok niego bez zaburzenia
(zaburzenie - zmiana amplitudy i fazy ruchu falowego). Utrwalony w materiale
światłoczułym obraz interferencyjny stanowi siatkę dyfrakcyjną, zwaną
hologramem, z którego odtwarza się obraz obiektu, powstały w wyniku
dyfrakcji odpowiednio ukształtowanej i skierowanej na hologram fali świetlnej.
Metody holograficzne rozwinęły się z chwilą wprowadzenia lasera. Pierwszą
próbą pomiaru chropowatości metodą holograficzną była praca Ribbensa,
w której zaproponowano stosowanie dwóch długości fal światła lub płynów
o różnych współczynnikach załamania. Zakres pomiaru nierówności wynosił od
kilkudziesięciu do kilkuset nanometrów.
Warstwicowanie powierzchni przez zastosowanie interferometrii holograficznej stwarza możliwości badań topografii. Wymagane jest dobre
rozpraszanie światła przez powierzchnie, co jest zazwyczaj spełnione w
przypadku powierzchni stosowanych powszechnie w budowie maszyn. Można
zastosować następujące metody warstwicowania holograficznego: metodę
dwóch źródeł światła, metodę dwóch długości fal światła i metodę cieczy
immersyjnych o różnych współczynnikach załamania.
Pierwszą metodę można łatwo zrealizować za pomocą dwuekspozycyjnej
holografii, zmieniając między ekspozycjami położenie źródła światła
oświetlającego obiekt. Światło laserowe zostało podzielone na dwa źródła przez
zwierciadło półprzezroczyste. Wiązki światła krzyżowały rejon konturowany
i generowały prążkowy konturowy obraz powierzchni, następnie
fotografowany.
Metoda wykorzystująca dwie długości światła ma wiele odmian. Podstawowym warunkiem jej stosowania jest posiadanie lasera generującego
promieniowanie o dwóch wartościach długości fal. Hologram tworzony przez
wiązkę świetlną o jednej długości fali, wywołany i utrwalony, zostaje
ustawiony w pozycji, którą zajmował pierwotnie. Następnie zostaje zmieniona
długość fal dwóch wiązek (przedmiotowej i odniesienia). Pewną trudnością jest
uzyskani wyraźnych prążków interferencyjnych.
Metoda cieczy immersyjnych polega na umieszczeniu obiektu w
pojemniku z cieczą immersyjną i wykonaniu hologramu dwuekspozycyjnego,
z zastosowaniem cieczy immersyjnych różniących się nieco współczynnikami
załamaniu światła. Metoda ta powstała w 1967 r. i dzięki swej prostocie,
łatwości zmian odległości między warstwicami oraz prostej postaci obrazu
prążków interferencyjnych została szybko wykorzystana w badaniach
wykonywanych w Polsce. Stosowanie metody immersyjnej do warstwicowania
mikronierówności napotykało duże trudności ze względu na ograniczone
możliwości powiększeń obrazów holograficznych, ziarnistość obrazów
uzyskiwanych z małego odcinka hologramu oraz efekt plamkowania.
Wartościowe wyniki uzyskano, tworząc obrazy warstwicowe replik
przezroczystych. Repliki wykonane z przezroczystego tworzywa muszą mieć
jedną powierzchnię wiernie odtwarzającą zarys nierówności, a drugą optycznie
gładką. Repliki te umieszcza się w kuwetach immersyjnych. Metoda ta
odtwarza pełny obraz powierzchni, jest jednak czasochłonna, typowo
laboratoryjna i obejmująca małe wymiary obserwowanych powierzchni.
Głównym zastosowaniem holografii są pomiary odkształceń i drgań (co
wynika z faktu, że wiązki promieniowania mogą być rozdzielone w czasie), nie
zaś pomiary chropowatości. Rozdzielczość pionowa jest słaba. Metoda ta jest
najlepsza w odniesieniu do płaskich powierzchni. Problemem jest konieczność
wykonania hologramu. Metody interferometrii holograficznej są czasochłonne,
stosowane jedynie w pracach badawczych. Możliwość stosowania tej metody
do pomiaru chropowatości w warunkach produkcyjnych jest niewielka. Brak
jest w handlu urządzeń do pomiaru SGP tą metodą [5].
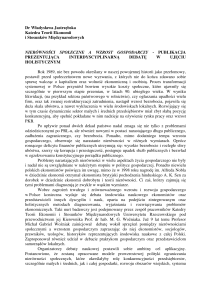
Rys. 5. Schemat działania metody cieczy immersyjnych wg pracy l - źródło światła,
2 - dzielnik wiązki, 3 - zwierciadło, 4 - kuweta immersyjna, 5 - zestaw soczewek, 6 - płyta
holograficzna, 7 - zwierciadło, 8 – soczewka [5]
METODA PRZEKROJU ŚWIETLNEGO
Metoda przekroju świetlnego polega na oświetleniu mierzonej powierzchni
pod kątem zazwyczaj równym 45°, przez wąską szczelinę. Powierzchnia
obserwowana przez mikroskop ustawiona jest pod względem układu
oświetlającego pod kątem 2. W mikroskopie obserwacyjnym widoczny jest,
zdeformowany przez nierówności powierzchni, obraz szczeliny układu
optycznego mikroskopu oświetlającego. W metodzie tej wykorzystuje się
zasady optyki geometrycznej oraz prostą analizę matematyczną, co pozwala
wyznaczać wysokość i odstęp nierówności. Zakres pomiaru, zależny od
powiększenia i apertury mikroskopu, wynosi od 0.5 do kilkudziesięciu
mikrometrów. System optyczny rzutował wiązkę pierścieniową. Obraz
mikroskopowy był obserwowany przez kamerę telewizyjną. Istnieje możliwość
otrzymania obrazu powierzchni w układzie 3D. Metoda ta jest szybka, lecz
wymaga przetwarzania wstępnego przed estymacją chropowatości.
Na rysunku 6 pokazano schemat układu stosowanego w pracy. Kamera TV
połączona jest z komputerem rejestrującym kolejne profile powierzchni podczas
ruchu przedmiotu.
Metoda ta w swojej pierwotnej postaci jest kłopotliwa w użyciu, umożliwia
wyznaczenie niewielu parametrów chropowatości, jest więc coraz rzadziej
stosowana. Zastosowanie komputerów do cyfrowej analizy obrazów
spowodowało wzrost zainteresowania tą metodą. Jej zaletą jest duży zakres
pomiarowy [5].
Rys. 6. Schemat układu wykorzystującego metodę przekroju świetlnego [5].
METODY SKATEROMETRYCZNA
Metody parametryczne (powierzchniowe) mają większe zastosowanie
w kontroli czynnej powierzchni niż metody profilometryczne.
Do metod analizy powierzchniowej zalicza się głównie metody oparte na
zjawisku rozpraszania światła. Metody oparte na rozpraszaniu światła dzielą się
na metody konwencjonalne (odbicie zwierciadlane, metoda TIS, analiza kątowa
światła rozproszonego i metody dyfrakcyjne) oraz metody plamkowe (kontrastu
plamek i korelacji plamkowej). Konwencjonalne metody pomiaru nierówności
oparte na wykorzystaniu zjawiska rozpraszania określane są terminem
"skaterometria nierówności powierzchni".
Teoretyczne podstawy metod oceny mikrogeometrii powierzchni
wykorzystujących rozpraszanie światła opierają się na zastosowaniu opisu
skalarnego. Charakteryzuje on falę świetlną za pomocą amplitudy,
częstotliwości, fazy i kierunku propagacji, nie uwzględnia zaś stanu polaryzacji
światła. Natomiast metody elipsometryczne operują wektorowym opisem fali
świetlnej.
Podstawą metod kontrastu jest wyznaczenie stopnia zaburzenia płaskiego
lub sferycznego czoła fali po rozproszeniu od testowanej próbki przez badanie
kontrastu obrazu interferencyjnego tworzonego z udziałem zaburzonej fali.
W metodach kontrastu pomiaru chropowatości powierzchni wyróżnia się
techniki plamkowe i interferometryczne.
Światło ugięte na powierzchni chropowatej ma dwojaki charakter. Jego
część odbija się w sposób zwierciadlany, druga część rozprasza się dyfuzyjnie
we wszystkich kierunkach.
Z spośród metod rozpraszania światła wyróżnia metody reflektometryczne
- wykorzystujące pomiar natężenia światła odbitego zwierciadlanie (często tą
nazwą określa się wszystkie metody rozpraszania, w których następuje odbicie
światła od powierzchni badanej), metody integracyjne (TIS), metody
różniczkowe (zwane niekiedy goniofometrycznymi, w których dokonywany jest
pomiar kątowego rozkładu natężenia światła odbitego od powierzchni) oraz
metody wykorzystujące optyczne przekształcenie Fouriera (metody
dyfrakcyjne).
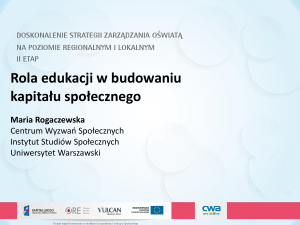
W przypadku powierzchni idealnie gładkiej zachodzi odbicie zwierciadlane. Gdy na powierzchni występują nierówności porównywalne z falą światła
padającego, część energii zostanie odbita, a część ulegnie rozproszeniu. Gdy
nierówności powierzchni są większe od długości fali światła, cała energia
światła odbitego ulegnie rozproszeniu. Takie odbicie jest odbiciem dyfuzyjnym.
Rysunek 7 przedstawia odbicie i rozproszenie światła na nierówności
powierzchni.
Rys. 7. Odbicie światła od powierzchni ; a) gładkiej b) o niewielkiej chropowatości c)
bardzo chropowatej [4].
Metody skaterometryczne są czułymi metodami bezkontaktowymi
i zapewniają znaczną szybkość pomiaru. Oprócz wysokościowych parametrów
nierówności analiza rozkładu światła rozproszonego pozwala określić także
inne ważne właściwości powierzchni, takie jak anizotropia, parametry wzdłużne
i kąty pochylenia [4].
Pomiary natężenia światła rozproszonego odbywają się za pomocą detektorów fotoelektrycznych. Szczególnym rodzajem półprzewodnikowych
detektorów fotoelektrycznych wykorzystujących zjawisko fotoelektryczne
wewnętrzne są przyrządy półprzewodnikowe ze sprzężeniem ładunkowym
CCD.
Do matematycznego opisu fal elektromagnetycznych wykorzystuje się
wektorowym równania Maxwella, pozwalające na uwzględnienie elektrycznych
i magnetycznych właściwości światła oraz jego polaryzacji. Wykorzystywane
są skalarne teorie dyfrakcji światła, takie jak teoria Rayleigha i Kirchhoffa
Teorie rozpraszania światła dotyczą powierzchni, których parametr Rq jest
znacznie mniejszy od długości fali światła. Zwiększanie długości fali (np.
stosowanie światła podczerwonego) zwiększa pionowy i poprzeczny zakres,
pogarszając jednak rozdzielczość.
Ogólnie metody skaterometryczne przydatne są do oceny mikrogeometrii
powierzchni, których wartość parametru Rq nie przekracza 1 m, choć bada, się
również powierzchnie bardziej chropowate [4].
ELIPSOMETRIA
Jedną z technik badawczych wykorzystujących światło spolaryzowane jest
(elipsometria. Bada ona zmianę stanu polaryzacji promienia świetlnego podczas
jego odbicia od powierzchni lub przechodzącego przez badany ośrodek. Służy
do pomiaru optycznych właściwości ciał stałych i warstw powierzchniowych.
Parametry elipsometryczne zależą m.in. od chropowatości. Na polaryzację fali
rozproszonej wpływają ponadto inne wielkości, np. rodzaj i stan materiału.
Z tego względu metody te wykorzystuje się rzadko. Można je zastosować do
kontroli jednorodności wytwarzanych powierzchni.
Gdy monochromatyczna fala płaszczyznowa spolaryzowana liniowo pada
skośnie na powierzchnię, fala odbita zwierciadlanie jest spolaryzowana eliptycznie. Do parametrów elipsometrycznych zalicza się kąt azymutalny światła
odbitego , zwany też kątem przywróconej polaryzacji, oraz różnicę faz
równoległej i prostopadłej wektora natężenia pola elektrycznego, zwaną
retardancją . Parametry te są związane z parametrami określającymi kształt i
położenie elipsy polaryzacji. Powierzchnie jednorodne materiałowo, o różnym
stanie nierówności, odbijają światło spolaryzowane w różny sposób. Wynika to
z faktu, że powierzchnie różnią się lokalnymi kątami nachylenia zboczy
nierówności. Elipsometrię jako potencjalne narzędzie kontroli czynnej
wprowadził Leonardo. Zauważono związek pomiędzy kątem określającym
położenie dłuższej osi elipsy polaryzacji i wysokością chropowatości
powierzchni Ra [4].
Rys. 8. Podstawowy schemat elipsometru [4].
Zakres metod elipsometrycznych nie przekracza kilku mikrometrów,
metody te są czułe. Wzrost czułości można osiągnąć przez zastosowanie tzw.
elipsometrii wielopromieniowej. Metody elipsometryczne mierzą stan
polaryzacyjny, a nie intensywność światła rozproszonego. Dlatego nie są
wrażliwe na fluktuację intensywności światła rozproszonego wynikającą
z drgań powierzchni, co stanowi zaletę metody.
W Polsce prace z zakresu budowy aparatury elipsometrycznej są
prowadzone w Politechnice Warszawskiej.
Pomimo wątpliwości co do celowości zastosowania metod
elipsometrycznych do pomiaru chropowatości , istnieje znaczne zainteresowanie
tymi metodami. Wynika to z ich dużej czułości i dokładności. Pomiary
nierówności powierzchni są coraz częściej wykonywane za pomocą seryjnie
produkowanych elipsometrów. Najczęściej stosuje się zautomatyzowane
elipsometry dynamiczne [4].
METODY PLAMKOWE
Techniki plamkowe wykorzystują efekt plamkowania laserowego powierzchnia oświetlona światłem o dużej koherencji tworzy tzw. obraz
plamkowy w postaci losowo rozłożonych jasnych i ciemnych plamek o różnej
intensywności. W płaszczyźnie pomiaru nad mierzoną powierzchnią wskutek
interferencji następuje lokalne wygaszanie lub wzmacnianie światła, tworzące
obraz plamkowy. Plamki są wynikiem interferencji fal wtórnych, powstałych
w wyniku rozpraszania światła. Metoda plamkowa ma dwie podstawowe
odmiany: kontrastu plamkowego (monochromatycznego i polichromatycznego )
i korelacji plamkowej.
Metody plamkowe są odpowiednie dla szerokiego zakresu chropowatości
(Rq = 10 nm - 50 m), rozdzielczość wynosi 0.1-1.0 m, nadają się zazwyczaj
do badania chropowatości o losowym charakterze . Umożliwiają szybki pomiar,
lecz wymagają, aby powierzchnie były czyste, o metalicznym kolorze [5].
Ad3. POZOSTAŁE METODY
METODY ELEKTRYCZNE
Szereg wielkości elektrycznych zależy od topografii powierzchni.
Prowadzono badania nad możliwością wykorzystania przewodności,
indukcyjności i pojemności układu powierzchnia chropowata-powierzchnia
wzorcowa do oceny parametrów chropowatości. Szczególne nadzieje należy
wiązać metodą pojemnościową. Pojemność kondensatora opisanego układu jest
odwrotnie skorelowana z wysokością nierówności. Najczęściej stosuje się
pomiar pojemności między powierzchnią mierzoną a elektrodą sztywną lub
zastosowanie elektrody elastycznej deformującej się. Badania nad metodą
pojemnościową, pod względem zastosowania jej jako laboratoryjnej metody
pomiarowej, prowadzone są w Stanach Zjednoczonych przez zespół prof.
Gabriniego. Metoda ta, będąca metodą profilometryczną, polega na przesuwie
elektrody podczas pomiaru wzdłuż powierzchni. zmiany nierówności
przetwarzane są na zmiany napięcia zależne od wysokości nierówności
w generatorze wysokiej częstotliwości. Płaska elektroda została ustawiona
równolegle do śladów obróbki. Badania prowadzone przez prof. Nowickiego
polegają na ustawieniu płaskiej elektrody prostopadle do śladów odróbki.
Istnieją skanujące mikroskopy pojemnościowe, w których elektroda skanuje
powierzchnię. Urządzenie zapewnia zakres poprzeczny 26 mm przy
rozdzielczości 10 m, zakres pionowy 5 mm, rozdzielczość pionowa 0,1 m.
Metoda indukcyjna oparta jest na korelacji pomiędzy indukcyjnością cewki
i jej odległością od materiału magnetycznego. Obserwowano związki pomiędzy
indukcyjnością a chropowatością powierzchni (największe dotyczyły liczby
wierzchołków profilu). Korelację ze średnią wysokością chropowatości
zaobserwowano jedynie w przypadku badań powierzchni po tym samym
rodzaju obróbki. jednakże, analizując związki pomiędzy przewodnością styku
układu powierzchnia chropowata - powierzchnia wzorcowa oraz
indukcyjnością układu głowica - powierzchnia chropowata, stwierdzono, że
związki te charakteryzują się dużą dyspersją związaną z oddziaływaniem błon
tlenkowych, wilgoci i zanieczyszczeniami, co nie pozwala na osiągnięcie
odpowiedniej dokładności pomiarów.
Zakres pomiaru metodami elektrycznymi zawiera się w przedziale od ok.
0,05 m do kilkudziesięciu m [2].
METODY MECHANICZNE
Metoda tarciowa, będąca metodą porównawczą, opiera się na zależności
oporów tarcia od parametrów chropowatości. Czujnik wyposażony w ślizgacz
jest dociskany do mierzonej powierzchni za pomocą płaskiej sprężyny. Podczas
pomiaru końcówka pomiarowa wraz z obudową i sprężyną zmienia swe kątowe
położenie względem mierzonej powierzchni do momentu, w którym następuje
względne ich przemieszczenie. Wartość kąta granicznego, przy którym końcówka zmienia położenie względem obudowy, jest miarą wartości parametru
chropowatości. Urządzenia działające na podobnej zasadzie służą do pomiaru
średniego pochylenia powierzchni, w przypadku zaś powierzchni o strukturze
losowej - parametru Ra.
Jedna z metod tarciowych polega na pomiarze czasu, w jakim wahadło
odchylone od pionu, stykające się z mierzoną powierzchnią, wraca do położenia
równowagi. Istotny jest wpływ średniej kwadratowej wysokości nierówności
i średniego pochylenia[3].
METODY PNEUMATYCZNE
Metody pneumatyczne dotyczą spadku ciśnienia, związanego z wypływem
sprzężonego powietrza przez szczelinę, której jednym elementem jest mierzona
powierzchnia. Przykładowo do analizy powierzchni papieru stosuje się metodę,
w której bada się przepływ powietrza przez szczelinę między próbką papieru
a krawędzią głowicy dotykającej próbki. Metoda pneumatyczna stosowana jest
zwykle do badań porównawczych. Inne metody wykorzystujące właściwości
płynów nie wyszły poza prace badawcze. Należą do nich - metoda oparta na
pomiarze wydatku cieczy wypływającej pomiędzy powierzchnią czołową dyszy
a powierzchnią mierzoną i metody kroplowe polegające na pomiarze czasu
spływania kropli cieczy po mierzonej powierzchni nachylonej pod pewnym
kątem lub na pomiarze średnicy koła zwilżonego kroplą wody dociśniętej do
mierzonej powierzchni płytą szklaną [3].
LITERATURA
1. http://encyklopedia.pwn.pl
2. Pawlus P.: Topografia powierzchni. WPRz, Rzeszów 2005.
3. Buchwald A., Olenderek H., Rosa W.: Urządzanie lasu. PWRiL, Warszawa
1990.
4. Nowicki B.: Struktura geometryczna. Chropowatość i falistość powierzchni.
WNT, Warszawa 1991.
5. Łukianowicz C.: Podstawy pomiarów nierówności powierzchni metodami
rozpraszania światła. WUPK, Koszalin 2001.