Paweł Strawiński
Analiza Danych Finansowych
Trochę teorii
W celu przeprowadzenia rygorystycznej ekonometrycznej analizy szeregu
finansowego będziemy traktowali obserwowany ciąg danych (x1 , x2 , . . . , xT )
jako realizację pewnego procesu stochastycznego. Proces stochastyczny to
funkcja losowa, czyli funkcja matematyczna określona na pewnej dziedzinie,
której wartości są ustalane w sposób losowy. W praktyce dziedziną, na której
zdefiniowana jest funkcja, jest najczęściej przedział czasowy (taki proces stochastyczny nazywany jest szeregiem czasowym) lub obszar przestrzeni (wtedy
nazywany jest polem losowym). Jako przykłady szeregów czasowych można
podać: fluktuacje giełdowe, sygnały, takie jak mowa, dźwięk i wideo, dane
medyczne takie jak EKG i EEG, ciśnienie krwi i temperatura ciała, losowe
ruchy takie jak ruchy Browna.
Matematycznie, proces stochastyczny jest zazwyczaj definiowany jako rodzina zmiennych losowych:
Xt t ∈ T
gdzie: Xt jest zmienną losowa, a T to zbiór indeksów procesu stochastycznego.
Zbiór wartości zmiennych losowych Xt nazywamy przestrzenią stanów
procesu stochastycznego, zaś pojedyncza wartość zmiennej losowej to stan
procesu stochastycznego. Procesy stochastyczne zdefiniowane na dyskretnej
przestrzeni stanów nazywane są łańcuchami.
Procesy stochastyczne dzielimy na deterministyczne i niedeterministyczne. Proces deterministyczny jest w kazdej chwili czasu jednoznacznie określony. Charakteryzuje się tym, że na podstawie bieżącej próbki jesteśmy w
stanie przewidzieć wartości procesu w przyszłości. Przykładem procesu deterministycznego jest trend liniowy.
Procesy niedeterministyczne, nazywane procesami stochastycznymi, charakteryzują się tym, że ich wartości w danej chwili czasu nie da się przewidzieć. Można jedynie określić przedział w którym z określonym prawdopodobieństwem znajduje się ich wartość. Proces stochastyczny możemy traktować
jako funkcję czasu i interpretować na dwa odmienne sposoby. Dla ustalonej
chwili czasu proces stochastyczny jest zmienną losową, dla ustalonej wartości
zmiennej losowej jest funkcją czasu, nazywaną realizacją procesu stochastycznego. Procesy stochastyczne dzielimy na procesy ergodyczne i nieergodyczne.
Procesy ergodyczne, to procesy które mogą być opisane przez momenty rzędu co najwyżej 2. Ich wartość oczekiwana w danej chwili jest równa wartości
średniej z dowolnej realizacji. Szczególnym przypadkiem są procesy stacjonarne, czyli takie w których istnieją zależności opisujące momenty, które są
niezależne od czasu. Porcesy nieergodyczne, to takie dla których nie istnieją
żadne stałe w czasie charakterystyki.
1
Paweł Strawiński
Analiza Danych Finansowych
Podczas zajęć będziemy zajmować się głownie procesami ergodycznymi
zdefiniowanymi na przestrzeniach ciągłych.
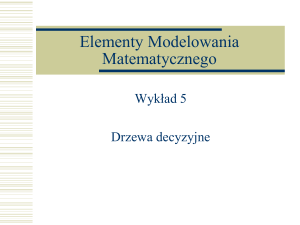
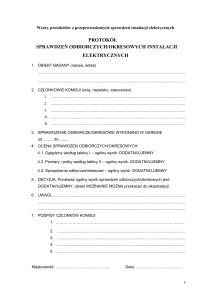
Biały szum
Jeżeli proces jest stacjonarny a zmienne losowe z których się on składa
są niezależne od siebie i pochodzą z rozkładu o średniej 0 i stałej wariancji
równej σ 2 .
ε ∼iid (0, σ 2 )
Jeżeli reszt są niezależne od siebie, to zachowują się w sposób czysto losowy.
Znają wartość reszty z okresu t nie jesteśmy w stanie przywidzieć czy reszta
w okresie t + 1 będzie dodatnia, czy też ujemna. W całkowicie odmienny
−2
−1
y
0
1
2
Rysunek 1: Biały szum
0
20
40
60
80
100
x
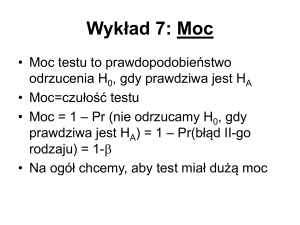
sposób zachowują się zmienne losowe, które są skorelowane. Dodatnia korelacja zmiennych sprawia, że jeżeli wartość w okresie t jest dodatnia to
będzie większe prawdopodobieństwo, że w okresie t + 1 będzie dodatnia, niż
ujemna. Natomiast jeżeli w okresie t wartość była ujemna, to będzie wyższe
prawdopodobieństwo otrzymania w okresie t + 1 wartości ujemnej niż wartości dodatniej. Jeżeli porównamy rysunki to zauważymy, że na rysunku z
dodatnią autokorelacją wykres realizacji pojedynczych zmiennych przecina
oś zerową znacznie rzadziej niż wykres białego szumu.
Dodatnia autokorelacja jest znacznie częściej występującą formą autokorelacji, niż autokorelacja ujemna. Jest ona powszechnym zjawiskiem w przypadku modeli szacowanych na szeregach czasowych. Występuje w przypadku,
gdy zjawisko losowe zaburzające przeciętny poziom zmiennych ma wpływ na
ich wartości w więcej niż jednym okresie.
2
Paweł Strawiński
Analiza Danych Finansowych
−2
−1
y1
0
1
2
Rysunek 2: Dodatnia autokorelacja
0
20
40
60
80
100
x
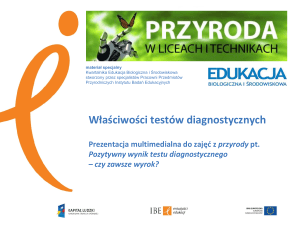
Ujemna autokorelacja zmiennych losowych powoduje, że większe jest prawdopodobieństwo zmiany znaku przez zmienną losową. Jeżeli w okresie t ma
ona wartość dodatnią, to w okresie t + 1 ze znacznie większym prawdopodobieństwem będzie ona ujemna niż dodatnia. Natomiast jeżeli w okresie t
jest ujemna, to ze znacznie większym prawdopodobieństwem będzie ona w
okresie t + 1 dodatnia. Jeżeli porównamy wykres procesu stochastycznego z
−2
−1
0
y2
1
2
3
Rysunek 3: Ujemna autokorelacja
0
20
40
60
80
100
x
ujemną autokorelacją z wykresem białego szumu, to zauważymy, że znacznie
częściej przecina on poziom 0.
Proces AR
3
Paweł Strawiński
Analiza Danych Finansowych
Istnieje wiele form autokorelacji. Każda z nich prowadzi do innej postaci
macierzy wariancji-kowariancji składnika losowego σ 2 Ω. Najbardziej rozpowszechnioną formą autokorelacji jest proces autoregresyjny pierwszego rzędu.
W takim przypadku przyjmuje on postać:
εt = ρεt−1 + φt
(1)
gdzie φ ∼iid (0, σ 2 ) jest wektorem zmiennych losowych o niezależnym rozkładzie ze średnią zero i stałą wariancją wynoszącą σ 2 . Zakładamy, że wartość
składnika losowego jest równa ρ razy wartość składnika z poprzedniego okresu plus innowacja φt . Nowy komponent φt ma średnią zero, stałą wariancję i
jest niezależny w wymiarze czasu.
Możemy ten wzór uogólnić. Proces autoregresyjny rzędu p ma następującą
postać analityczną.
εt = ρ1 εt−1 + ρ2 εt−2 + . . . + ρt−p εt−p + φt
(2)
Proces MA
Inną często spotykaną formą autokorelacji jest proces średniej ruchomej
Moving Average. Błąd z okresu t jest średnią z pewnej ilości okresów.
yt = µ + εt − θεt−1
(3)
Podobnie jak w przypadku procesu AR możemy wzór uogólnić. Proces średniej ruchomej rzędu q dany jest przez
yt = µ + εt − θ1 εt−1 − θ2 εt−2 − . . . − θq εt−q
0.0.1
(4)
Operator opóźnień
Użytecznymi narządziemi skracającym zapis postaci analitycznej modeli dynamicznych są oprerator opóźnień i operator różnicowy.
Operator opóznień jest zdefiniowany następująco:
Lxt = xx−1
Ten operator możemy w obliczeniach traktować jak liczbę. Ma on następujące
własności:
• La = a
• L2 xt = L(Lxt ) = Lxt−1 = xt−2
• Lp xt = xt−p
4
Paweł Strawiński
0.0.2
Analiza Danych Finansowych
Operator różnicowy
Drugim użytecznym narzędziem jest operator różnicowy
∆xt = xt − xt−1
Ten operator również może w obliczeniach być traktowany jak liczba. Ma on
następujące własności:
• ∆a = 0
• ∆2 xt = ∆∆xt = ∆(xt − xt−1 ) = (xt − xt−1 ) − (xt−1 − xt−2 )
• ∆p xt = . . . = (xt − xt−1 ) − . . . − (xt−(p+1) − xt−p )
• xt = xt−1 + ∆xt
• ∆xt = (1 − L)xt
Możemy połączyć użycie obu operatorów:
∆2 xt = (1 − L)2 xt = (1 − 2L + L2 )xt = xt − 2xt−1 + xt−2 = ∆xt − ∆xt−1
Dodatkowo zauważmy, że:
(1−L)2 xt = (1−L)(1−L)xt = (1−L)(xt −xt−1 ) = (xt −xt−1 )−(xt−1 −xt−2 )
Dynamiczne równanie regresji możemy przedstwić jako:
yt = α +
∞
X
βi Li xt + εt = α + B(L)xt + εt
i=0
gdzie B jest wielomianem zmiennej L:
B(L) = β0 L0 + β1 L1 + β2 L2 + . . .
Wielomian operatora opóźnień to wyrażenie postaci:
2
3
A(L) = 1 + aL + (aL) + (aL) + . . . =
∞
X
i=0
jeśli | a |< 1, wtedy:
A(L) =
5
1
1 − aL
aLi
Paweł Strawiński
0.0.3
Analiza Danych Finansowych
Model ARIMA
Nazwa modelu jest zbitką trzech nazw. AR pochodzi od procesu autoregrasyjnego, I od procesu zinterowanego, a MA od procesu średniej ruchomej.
Postać analityczna modelu jest dość skomplikowana:
∆d yt = µ + γ1 ∆d yt−1 + γ2 ∆d yt−2 + . . . + γp ∆d yt−p + εt − θ1 εt−1 − . . . − θq εt−q
ale zapis można uprościć stosując wielomiany operatora opóźnień i operator
różnicowy:
C(L)[(1 − ∆L)d yt ] = µ + D(L)εt
Innym sposobem zapisu modelu jest ARIM A(p, d, q), gdzie p oznacza rząd
procesu autoregresyjnego, q rząd procesu średniej ruchomej, a d rząd integracji procesu.
0.0.4
Stacjonarność
Lemat 1 Proces stochastyczny jest słabo (wariancyjnie) stacjonarny jeśli
var(xi ) = σ 2 < ∞ oraz cov(xt , xt+h ) = cov(xt+j , xt+j+h ) = γh dla dowolnych t, j, h.
Intuicyjnie proces stochastyczny jest stacjonarny jeżeli ma skończoną wariancję oraz kowariancje między obserwacjami nie zależą od czasu, a jedynie
od odległości między obserwacjami.
przedLemat 2 Proces zintegrowany stopnia
P∞zero, oznaczamy I(0). Można
2
stawić go w postaci xt − E(xt ) =
ε
,
gdzie
ε
∼
(0,
σ
)
biały
t
IID
i=0 t−i
szum.
Lemat 3 Proces stochastyczny xt nazywamy procesem zintegrowanym rzędu
d jeżeli ∆d xt jest I(0).
0.0.5
Pierwiastki jednostkowe i Test Dickey’a-Fullera
Jeżeli proces stochastyczny zawiera pierwiastek który leży wewnątrz bądź na
obrzeżu koła jednostkowego, to jest procesem niestacjonarnym. Test Dickey’aFullera wykrywa obecność pierwiastków jednostkowych.
Jeżeli mamy model autoregresji w którym zmienna yt jest szeregiem czasowymi postaci:
yt = ρyt−1 + εt
(5)
Chcemy sprawdzić czy zmienna yt jest stacjonarna. Wydaje się, że wystarczy
przeprowadzić test czy ρ = 1 za pomocą statystyki t-Studenta.
6
Paweł Strawiński
Analiza Danych Finansowych
Jeżeli składnik losowy w równaniu (5) jest procesem białego szumu, to
jeśli | ρ |< 1 to ten proces jest zintegrowany stopnia zero. Lecz w przypadku gdy ρ = 1 równianie reprezentuje proces błądzenia losowego. Wtedy
proces generujący yt jest niestacjonarny. W takim przypadku statystyka t
nie będzie miała rozkładu t-Studenta i nie możemy jej wartości używać do
standardowych testów.
Rozwiązaniem problemu testowania stopnia integracji jest procedura zaproponowana przez Dickey’a i Fullera i nazwana od nazwisk autorów testem
DF. Test DF weryfikuje hipotezę, że w równaniu (5) ρ = 1, czyli że mamy pierwiastek jednostkowy. Dlatego ten test również jest nazywany testem
pierwiastka jednostkowego. Zapiszmy równanie (5) w postaci:
yt = (1 + δ)yt−1 + εt
yt − yt−1 = δyt−1 + εt
∆yt = δyt−1 + εt
(6)
i testujemy hipotezę zerową:
H0 : δ = 0
H1 : δ < 0
odrzucenie hipotezy zerowej δ = 0 na rzecz hipotezy alternatywnej oznacza
że yt nie ma pierwiastków w kole jednostkowym, jest zintegrowane stopnia
zero I(0).
Statystyka testowa t nie ma rozkładu t-Studenta. Wartości krytyczne
odczytujemy z tablic wartości testu Dickey’a-Fullera. Wszystkie wartości
krytyczne są w lewym ogonie rozkładu i są znacznie niższe od statystyk
t-Studenta. Wartości krytyczne testu Dickey-Fuller’a otrzymywane są za pomocą symulacji Monte Carlo, więc są one obciążone pewnym błędem. Dlatego
niektóre tablice podają nie jedną, a dwie wartości krytyczne dolną i górną.
Pomiędzy nimi leży obszar braku konkluzji.
0.0.6
Test ADF
Test Dickey’a-Fullera nie uwzględnia faktu, że składnik losowy równania (5)
może zawierać autokorelację. W przypadku występowania autokorelacji estymatory MNK są nieefektywne. Wobec tego stosuje się Rozszerzony test
Dickey’a-Fullera (Augmented Dickey-Fuller test). W równaniu regresji po
prawej stronie umieszcza się opóźnione wartości zmiennej zależnej. Równanie przyjmuje postać:
∆yt = δyt−1 +
k
X
i=1
7
γi ∆yt−i + εt
(7)
Paweł Strawiński
Analiza Danych Finansowych
Sposób testowania oraz wartości krytyczne testu są identyczne jak w teście
Dickey-Fullera.
0.0.7
Kointegracja i Test Engla-Grengera
Jeżeli mamy równanie regresji w którym zmienne xt i yt są szeregami czasowymi, to te szeregi mogą zawierać trendy czasowe. Wobec tego są one niestacjonarne. Jeżeli istnieje między nimi długookresowy związek, to mówimy że
procesy xt i yt są skointegrowane jeżeli odchylenia od ścieżki długookresowej
są stacjonarne.
Formalna definicja kointegracji podana przez Engla i Grengera jest następująca:
Lemat 4 Mówimy, że szeregi czasowe są skointegrowane stopnia (d, b) co
zapisujemy:
xt , yt ∼ CI(d, b)
jeżeli:
1. Oba szeregi są zintegowane stopnia b
2. istnieje kombinacja liniowa tych zmiennych a1 xt + a2 yt , która jest zintegrowana stopnia d − b
Lemat 5 Wektor [a1 , a2 ] nazywamy wektorem kointegrującym.
Testowanie kointegracji jest analogiczne do testowania integracji. Sprawdzamy czy kombinacja liniowa zmiennych jest I(0). Test przeprowadzamy za
pomocą procedury zaproponowanej przez Engla i Grengera.
1. Testujemy stopień integracji zmiennych związanych z badaną długookresową zależnością. Jeżeli w modelu mamy więcej niż dwie zmienne
to stopień integracji zmiennej zależnej nie może być wyższy niż stopień
integracji którejkolwiek ze zmiennych objaśniających. Ponadto liczba
zmiennych o stopniu integracji wyższym od zmiennej zależnej modelu,
powinna być albo równa zero, albo powinny być dwie takie zmienne.
2. Jeżeli znamy postać wektora kointegrującego [1, −β] to test Dickey’aFullera na kointegrację polega na obliczeniu statystyki t-Studenta dla
parametru δ w regresji
∆ut = δut−1 + εt
gdzie:
ut = yt − βxt
8
(8)
Paweł Strawiński
Analiza Danych Finansowych
i porównaniu jej z wartością krytyczną z tablic dla testu DF. Dla testu
ADF procedura jest analogiczna. Obliczamy statystykę t dla parametru
δ z równania:
k
X
∆ut = δut−1 +
δi ∆ut−i + εt
(9)
i=1
Jeżeli relacja długookresowa nie jest znana a prori to najpierw szacujemy MNK parametry wektora kointegrującego.
yt = β1 x1 + . . . + βk xk + νt
Następnie do równania (8) lub (9) w zależności od postaci testu zamiast
ut wstawiamy oszacowane wektor reszt ν, więc:
∆νt = δνt−1 + εt
lub w przypadku testu ADF:
∆νt = δνt−1 +
k
X
δi ∆νt−i + ζt
i=1
Podobnie jak w przypadku testu integracji statystyka wartości krytyczne
dla statystyki t-Studenta odczytujemy z tablic testu DF. Gdy musimy oszacować wektor kointegrujący wartości krytyczne dla statystyki testowej zależą
również od liczby szacowanych parametrów wektora kointegrującego m.
0.0.8
Mechanizm korekcji błędem (ECM)
Jeżeli dwa szeregi czasowe xt i yt są niestacjonarne i skointegrowane, to ich kointegracja powoduje, że składnik losowy relacji długookresowej nie zwiększa
się. Engle i Grenger udowodnili, że każdy szereg skointegrowany ma reprezentację za pomocą mechanizmu korekty błędem. Twierdzenie odwrotne jest
również prawdziwe, tzn. każdy mechanizm korekty błędem można przedstawić za pomocą szeregów skointegrowanych.
Rozpatrzmy model:
yt = βxt + εt
(10)
gdzie yt oraz xt są I(1). Przypuśćmy że yt i xt są CI(1, 1) z wektorem kointegrującym [−1, β]. Wobec tego model (10) można przedstawić za pomocą
mechanizmu korekty błędem
∆yt = α1 ∆xt + α2 (yt−1 − βxt−1 ) + εt
9
(11)
Paweł Strawiński
Analiza Danych Finansowych
gdzie α2 < 0. Ten model szacuje się również za pomocą dwustopniowej procedury Engla-Grengera. W pierwszym kroku szacujemy równanie (10) za pomocą MNK i testujemy hipotezę o stacjonarności reszt. Jeśli są stacjonarne to
szacujemy (11) zastępując β otrzymanym w pierwszym kroku estymatorem.
W ten sposób w równaniu (11) wszystkie zmienne są stacjonarne.
10