Politechnika Łódzka
Wydział Elektrotechniki, Elektroniki,
Informatyki i Automatyki
Instytut Elektroenergetyki
Zespół Trakcji Elektrycznej
ĆWICZENIE T7
Badanie przekształtnika impulsowego o sterowaniu
częstotliwościowym.
Cel ćwiczenia: Celem ćwiczenia jest zapoznanie się z działaniem dwufazowego przekształtnika
impulsowego jednooperacyjnego
1.
Zasada impulsowej regulacji napięcia
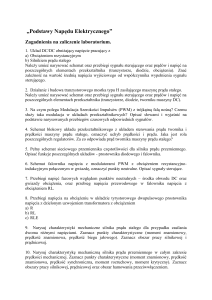
Podstawowy układ regulacji impulsowej składa się z filtru wejściowego Lf, Cf, przekształtnika
tyrystorowego P i elementów wygładzających prąd w obwodzie obciążenia. Są to: dławik
obciążenia Lo, dioda zwrotna Do i ewentualnie tzw. bocznik harmonicznych Rh przyłączony
równolegle do uzwojenia wzbudzenia silnika (Rys. 1.).
Pracę układów rozpatrzymy przy następujących założeniach upraszczających:
1) Pojemność kondensatora filtra wejściowego Cf jest tak duża, że pulsację napięcia na nim
można zaniedbać,
2) Indukcyjność w obwodzie obciążenia Lo jest tak duża, że pulsację prądu silnika Is można
zaniedbać.
a) praca silnikowa (układ jazdy)
3) Przekształtnik tyrystorowy P traktujemy jako dwustawny łącznik, natychmiastowo
zmieniający swoje stany.
4) Straty mocy w elementach biernych i półprzewodnikowych pomijamy.
W czasie przewodzenia przekształtnika, do obwodu obciążenia przyłożone jest napięcie U.
W czasie tw , (stanu blokowania) przekształtnika, kiedy pod wpływem SEM samoindukcji dławika
obciążenia i uzwojeń silnika podtrzymywany jest prąd w obwodzie silnika przez diodę zwrotną D o
(mimo przeciwnie działającej SEM rotacji silnika), napięcie na gałęzi obciążenia jest równe zeru.
Ponieważ średnia wartość napięcia za okres T na indukcyjności Lo jako elemencie biernym musi
być równa zero, średnia wartość napięcia na gałęzi obciążenia jest równa napięciu silnika i wynosi:
Us
tz
1
T
tz
Udt U T U
0
w całym przedziale regulacji współczynnika wypełnienia , od 0 do 1.
T
+
Lf
P
Lo
U
I
Us
Is
A
tz
E
Cf
U
Do
(1-)T
T
H
E
Us
Rh
tw
*
1
U*
1
Us*
F
-
U
Us*
0
I*
Is*
I*
Is*
1
0
1
Rys. 1 Impulsowa regulacja napięcia
Pomijając straty w układzie, na podstawie porównania mocy na wejściu i wyjściu przekształtnika:
U I Us Is
otrzymujemy, że:
I Is
Na wykresach umieszczonych z prawej strony rys. 1 przedstawiono względne wartości napięć i
prądów, odniesionych do stałych (z założenia) wartości U i Is .
Ten wyidealizowany obraz pracy przekształtnika, w rzeczywistych rozwiązaniach jest silnie
zniekształcony wskutek tętnień napięcia na filtrze wejściowym, pulsacji prądu w obwodzie
obciążenia, procesów komutacyjnych zachodzących w przekształtniku a zmieniających kształt
wyjściowych impulsów napięcia i nakładających pewne ograniczenia na wartości minimalne
i maksymalne współczynnika wypełnienia oraz strat w elementach układu. Ponadto w praktyce
stosuje się zwykle układy wielofazowe przekształtników impulsowych i występuje wzajemne
oddziaływanie na siebie poszczególnych faz, pracujących z określonym przesunięciem w cyklu.
2. Praca pojedynczej fazy przekształtnika jednooperacyjnego
Badany w ćwiczeniu układ przekształtnika impulsowego jest układem 2-fazowym. Każda
z jednakowo zbudowanych tzw. faz pracuje z przesunięciem o ½ okresu na wspólną gałąź
obciążenia (silnik szeregowy). Praca poszczególnych faz jest całkowicie niezależna wskutek
odseparowania ich nawzajem diodami rozdzielającymi.
2
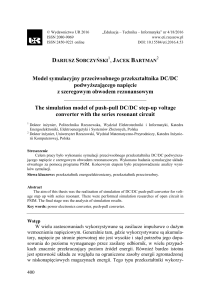
Prześledźmy działanie pojedynczej fazy w oparciu o uproszczony schemat, przedstawiony
na rys. 2.
Lf
T
LK
+
Lo
Dr
iT
Is
I
Cf
U
A
iDo
UT
UC
CK
S
UDo
Do
H
E
Us
F
-
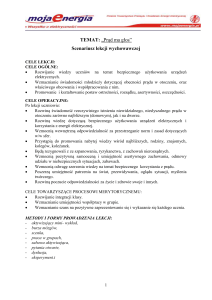
Rys.2.
iT
t
uT
t
uC
t
iDo
t
uDo
t
t0 t1
t2
t3 t4
t5
t6
t7
Rys. 3
W stanie ustalonym przed włączeniem tyrystora T kondensator komutacyjny C K jest
rozładowany (nie naładowany), zaś prąd obciążenia Is płynie w obwodzie: Lo, silnik S, Do. Energia
dostarczona silnikowi czerpana jest z energii pola magnetycznego zgromadzonej w indukcyjności
obciążenia Lo. Cały okres impulsowania podzielić można na 4 podzakresy: t1 (od t0 do t1), t2 (od
t1 do t4), t3 (od t4 do t6), oraz t4 (od t6 do t7), w których procesy elektromagnetyczne zachowują
stały charakter.
Dla zakresu t1 , liczonego do momentu, w którym prąd tyrystora iT zrówna się z prądem
obciążenia IS, obowiązują równania:
u Do 0
diT
U
dt
iT iDo I S
LK
(2.1)
3
z których otrzymać można następujące wzory:
iT
U
t t0
LK
iDo I S
t1
(2.2)
U
t t0
LK
(2.3)
I S LK
U
(2.4)
Prąd tyrystora wzrasta w tym okresie liniowo i podobnie liniowo maleje do zera prąd diody
zwrotnej.
W przedziale t2 na stan osiągnięty w momencie t1, w którym przestaje przewodzić dioda
zwrotna, nakłada się proces oscylacyjnego przeładowania pojemności C K przez indukcyjność LK.
Obowiązują tu następujące równania:
iDo 0
diT
uDo U
dt
du
iT CK Do I S
dt
(2.5)
LK
z których otrzymać można równanie różniczkowe postaci:
d 2uDo
1
1
uDo
U
2
dt
LK CK
LK CK
(2.6)
Pierwiastki równania charakterystycznego zależności (2.6) są urojone:
s1, 2 j
1
, dlatego przebieg uo jest oscylacyjny. Rozwiązując równania (2.5) i (2.6)
LK CK
z uwzględnieniem warunków brzegowych: (uDo)t1 = 0 i (iT)t1= IS otrzymuje się następujące wzory:
iT I S U
CK
sin
LK
t t1
LK CK
t t1
u Do U 1 cos
LK CK
(2.7)
(2.8)
Aby prąd tyrystora iT osiągnął w momencie t4 wartość równą 0, co umożliwia odzyskanie
sterowalności, musi być spełniony warunek:
IS U
CK
LK
(2.9)
W praktyce tak dobiera się wartości LK i CK, aby przy minimalnym napięciu zasilającym U
amplituda składowej sinusoidalnej prądu tyrystora była dwu- a nawet trzykrotnie większa od
maksymalnej wartości prądu obciążenia IS.
4
Podokres od t1 do t3 nazywa się przeładowaniem przygotowawczym kondensatora
komutacyjnego, zaś podokres od t3 do t4 – przeładowaniem gaszącym. Całkowitą długość okresu
t2 wyznaczyć można, podstawiając do wzoru 2.7 iT = 0 w chwili t = t4:
I
LK
t2 t4 t1 LK CK arc sin S
U
CK
(2.10)
Chwilowa wartość napięcia wyjściowego uDo w momencie t4 jest nieco mniejsza od 2U:
uDo t 4 U 1
1
LK I S2
CK U 2
(2.11)
Dla okresu Dt3 obowiązuje układ równań:
iT 0
iDo 0
CK
(2.12)
du Do
IS 0
dt
Z ostatniego równania po wykorzystaniu warunku brzegowego (2.11) otrzymuje się
rozwiązanie o postaci:
L I2
uDo U 1 1 K S2
CK U
I
S t t4
CK
(2.13)
W momencie t6 uDo = 0, stąd:
C U
t3 t6 t4 K
IS
LK I S2
1 1
CK U 2
(2.14)
W momencie t5 napięcie na tyrystorze uT = 0, zaś uDo = 0. Ze wzoru 2.13 otrzymać można
czas ujemnego spolaryzowania tyrystora (czas dysponowany na wyłączenie tyrystora):
twyl t5 t4 CK
U 2 LK
I S2 CK
(2.15)
Zależy on głównie od wartości pojemności CK, którą należy tak dobrać, aby zapewnić twył
większy od katalogowej wartości czasu wyłączania typu tyrystora nawet przy minimalnej wartości
napięcia zasilającego U i przy maksymalnej wartości prądu obciążenia IS.
Ostatni okres cyklu t4 charakteryzuje się następującymi stanami ustalonymi:
iT 0
u Do 0
(2.16)
iDo I S
Czas trwania przedziału t4 znaleźć można znająć t1, t2 i t3 oraz częstotliwość
impulsowania f z oczywistej zależności:
T
4
1
t j
f j 1
(2.17)
5
Napięcie na kondensatorze komutacyjnym znaleźć można w każdym momencie cyklu jako
różnicę:
uC U uDo
(2.18)
Prąd i czerpany z sieci jest równy różnicy:
i I S iDo
(2.19)
Średnia za okres wartość napięcia na indukcyjności Lo musi być równa 0, gdyż jest to
z założenia element bezstratny.
Średnią wartość napięcia wyjściowego US znaleźć zatem można jako wartość średnią
napięcia uDo:
t
US
1 1
u Do dt
T t0
(2.20)
skąd po rozwiązaniu z wykorzystaniem zależności 2.8 oraz 2.13 i uporządkowaniu otrzymuje się
zależność o postaci:
US
U t1
t2 t3
T 2
(2.21)
z której wynika, że przy danym prądzie obciążenia IS napięcie na silniku jest wprost proporcjonalne
do częstotliwości, wynikającej z warunku Dt4 = 0, zapewniającego teoretycznie cykliczność
procesów. Jest ono nieco mniejsze od napięcia U sieci zasilającej.
Średnią wartość prądu czerpanego z sieci znaleźć można z równania:
t
I
1 0 T
i dt
T t0
(2.22)
z którego po scałkowaniu i uporządkowaniu uzyskuje się wzór:
I
I S t1
t2 t3
T 2
(2.23)
Jak łatwo sprawdzić, z równań 2.21 i 2.23 wynika bilans mocy wejściowej i wyjściowej
U I U S I S , zgodny z założeniem bezstratności elementów fazy.
Rozruch silnika w przedstawionym układzie dokonuje się przez płynny wzrost
częstotliwości pracy przekształtnika, umożliwiający utrzymanie stałej wartości prądu IS. Minimalna
wartość częstotliwości powinna być tak dobrana, aby otrzymane przy niej napięcie wyjściowe U S
można było przyłożyć do nieruchomego silnika bez przekroczenia założonej wartości prądu
rozruchowego. Należy jednak zwrócić uwagę, że w rzeczywistym układzie przy skończonych
wartościach pojemności Cf i indukcyjności Lf i Lo przy niskich częstotliwościach rozruchowych
zwiększają się pulsacje prądu pobieranego z sieci i płynącego przez silnik. Jest to źródłem
dodatkowych strat w układzie zasilania i w silniku. W miarę wzrostu napięcia wyjściowego
poprawia się skuteczność działania układów wygładzających.
6
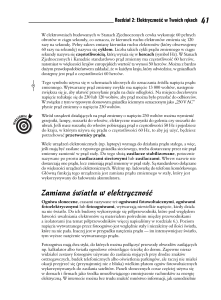
3. Wykonanie ćwiczenia
Przed przystąpieniem do wykonywania ćwiczenia należy spisać dane znamionowe
wszystkich używanych w nim maszyn, a następnie połączyć układ zgodnie ze schematem
zamieszczonym na rys. 4.
A1
A2
Czoper
dwufazowy
B1
Rw
+
K1
V1
-
E
V2
B2
R
A
S
P
C
+
D
-
H
K2
Sterownik
czopera
Rys. 4. Schemat połączeń badanego układu
Podczas przeprowadzania badań należy przestrzegać następujących zasad:
-
nie dopuszczać do przekraczania prędkości wirowania maszyn nmax= 1500 obr/min;
-
nie zamykać wyłącznika W1 przed zamknięciem wyłącznika W2 i zanurzeniem płyt
opornika wodnego, by zapobiec możliwości rozbiegania się maszyn;
-
podczas przerw w badaniach otwierać wyłącznik W2, by nie dopuścić do przegrzania
uzwojenia wzbudzenia prądnicy P, wobec braku chłodzenia przy nie wirującej maszynie.
Wyniki pomiarów powinny być zapisywane w tabelach o następującej zawartości:
Lp.
I1
U1
I2
U2
f
P1
P2
η
-
A
V
A
V
Hz
W
W
-
7
Przebieg ćwiczenia
Ustawić wartość napięcia zasilającego U1 = 160 V i utrzymywać tę wartość podczas
zdejmowania wszystkich charakterystyk.
I.
Pomiary przy pojemności komutacyjnej Ck = 25 μF. Należy zdjąć następujące
charakterystyki:
1.
Pracują dwie fazy przekształtnika, przy f = 555 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 6A do 12A.
2.
Pracują dwie fazy przekształtnika, przy f = 277 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 5A do 12A.
3.
Pracuje jedna faza przekształtnika, przy f = 555 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 5A do 10A.
4.
Pracuje jedna faza przekształtnika, przy f = 277 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 3A do 8A.
5.
Pracują dwie fazy przekształtnika. Utrzymując stałą wartość I2 =6A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
6.
Pracują dwie fazy przekształtnika. Utrzymując stałą wartość I2 =8A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
7.
Pracują jedna faza przekształtnika. Utrzymując stałą wartość I2 =5A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
8.
Pracują jedna faza przekształtnika. Utrzymując stałą wartość I2 =7A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
II.
Pomiary przy pojemności komutacyjnej Ck = 25 μF. Należy zdjąć następujące
charakterystyki:
1.
Pracują dwie fazy przekształtnika, przy f = 555 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 6A do 12A.
2.
Pracują dwie fazy przekształtnika, przy f = 277 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 3A do 9A.
8
3.
Pracuje jedna faza przekształtnika, przy f = 555 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 4A do 9A.
4.
Pracuje jedna faza przekształtnika, przy f = 277 Hz =const należy zdjąć charakterystykę
U2 w funkcji prądu I2, regulując obciążenie prądnicy P opornikiem wodnym i jej
prądem wzbudzenia. Prąd I2 zmieniamy w granicach od 2A do 6A.
5.
Pracują dwie fazy przekształtnika. Utrzymując stałą wartość I2 =5A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
6.
Pracują dwie fazy przekształtnika. Utrzymując stałą wartość I2 =7A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
7.
Pracują jedna faza przekształtnika. Utrzymując stałą wartość I2 =5A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
8.
Pracują jedna faza przekształtnika. Utrzymując stałą wartość I2 =7A należy zdjąć
charakterystykę U2 w funkcji częstotliwości f w możliwie szerokim zakresie regulacji.
Sprawozdanie powinno zawierać: zestawienie wyników pomiarów, wykresy zdjętych
charakterystyk i wnioski płynące z otrzymanych wyników.
9