MES dla stacjonarnego przepływu ciepła
Piotr Pluciński
e-mail: [email protected]
Jerzy Pamin
e-mail: [email protected]
Instytut Technologii Informatycznych w Inżynierii Lądowej
Wydział Inżynierii Lądowej Politechniki Krakowskiej
Strona domowa: www.L5.pk.edu.pl
c P.Pluciński
Metody obliczeniowe, 2015 Zakres prezentacji
1 Stacjonarny przepływ ciepła w 3D
Model - sformułowanie mocne
Model - sformułowanie słabe
Równania MES
2 Dobór funkcji aproksymacyjnych
Funkcje kształtu dla zagadnienia 1D
Funkcje kształtu dla zagadnienia 2D
Funkcje kształtu dla zagadnienia 3D
c P.Pluciński
Metody obliczeniowe, 2015 Problem stacjonarnego przepływu ciepła w 3D
Podstawowa niewiadoma - temperatura T
q
n
prawo przewodnictwa cieplnego
Fouriera
q = −D ∇T
qn = qT n
wektor gęstości strumienia ciepła
q = {qx qy qz } [W/m2 ]
∂
∂x
∂
∂y
∂
∂z
∇=
wektor (
gradientu temperatury
)
∂T ∂T ∂T
∇T =
[K/m]
∂x ∂y ∂z
macierz przewodnictwa cieplnego
D = {kij } [W/(mK)]
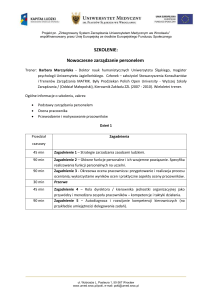
Gęstość strumienia wzrasta ze wzrostem gradientu temperatury.
Ciepło płynie od wyższej do niższej temperatury.
∇T
q
zimno
ciepło
c P.Pluciński
Metody obliczeniowe, 2015 Bilans cieplny dla stacjonarnego przepływu ciepła
Ilość ciepła generowanego = ilość ciepła wypływającego
Z
Z
f dV =
V
qn dS
∀V
V
S
f – gęstość źródła ciepła – ilość ciepła dostarczana ciału
na jednostkę objętości i czasu [J/(m3 s)=W/m3 ]
S
Wykorzystując twierdzenie Greena–Gaussa–Ostrogradskiego o całkowaniu
przez części
Z
Z
qn dS =
S
qT n dS =
S
Z
divq dV =
V
Z
f dV =
V
Z (
Z
∇T q dV ∀ V
V
∂qx
∂qy
∂qz
+
+
∂x
∂y
∂z
)
⇒ ∇T q = f ∀x ∈ V
V
c P.Pluciński
Metody obliczeniowe, 2015 dV
Problem stacjonarnego przepływu ciepła w 3D
Równania przepływu ciepła
Równanie przewodnictwa (sformułowanie mocne)
∇T (D∇T ) + f = 0 ∀x ∈ V
+ warunki brzegowe
qn = qT n = qb na Sq – naturalne w.b.(Neumanna)
T = Tb
na ST – podstawowe w.b. (Dirichleta)
V
ST
Sq
Dla materiałów izotropowych macierz D przyjmuje formę D = kI
∂2T
∂2T
∂2T
f
+
+
+ =0
2
2
2
∂x
∂y
∂z
k
– równanie Poissona
Dla materiałów izotropowych bez źródła ciepła
∂2T
∂2T
∂2T
+
+
=0
∂x2
∂y 2
∂z 2
– równanie Laplace’a
c P.Pluciński
Metody obliczeniowe, 2015 Stacjonarny przepływ ciepła w 3D
Weighted residual method
Z
w ∇T (D∇T ) + f dV = 0
∀w 6= 0
V
Z
Z
T
w∇ (D∇T )dV +
wf dV = 0
V
V
ST
V
Sq
Sformułowanie słabe
Z
Z
Z
−q T
T
− (∇w) D∇T dV +
w D∇T
ndS +
wf dV = 0
V
S
Z
−
(∇w)T D∇T dV −
V
Z
T
qn
Z
w qT n dS +
wf dV = 0
S
Z
(∇w) D∇T dV = −
V
V
Z
Sq
V
Z
w qb dS −
naturalny w.b.
Z
w qn dS +
ST
wf dV
V
niewiadoma wtórna
c P.Pluciński
Metody obliczeniowe, 2015 ∀w
Problem stacjonarnego przepływu ciepła w 3D
Sformułowanie mocne
∇T (D∇T ) + f = 0 ∀x ∈ V
+ warunki brzegowe
qn = qT n = qb
T = Tb
V
na Sq
ST
na ST
Sq
Sformułowanie słabe
Z
T
Z
Z
(∇w) D∇T dV = −
V
wb
q dS −
Sq
Z
wqn dS +
ST
∀w 6= 0
wf dV
V
+ podstawowy warunek brzegowy
T = Tb
na ST
c P.Pluciński
Metody obliczeniowe, 2015 Problem stacjonarnego przepływu ciepła w 3D
Układ równań MES
T = NΘ – aproksymowana funkcja temperatury
N – wektor funkcji kształtu
Θ – wektor węzłowych wartości temperatury
∇T = BΘ – aproksymowana funkcja gradientu temperatury
B = ∇N – macierz pochodnych funkcji kształtu
Z
Z
Z
Z
T
(∇w) D∇T dV = −
wb
q dS −
wqn dS +
wf dV
V
Sq
ST
∀w 6= 0
V
KΘ = fb + f
Z
K=
V
Z
Z
T
B DBdV, fb = − N qb dS−
T
Sq
T
Z
N qn dS, f =
ST
NT f dV
V
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych
Podstawowe kroki algorytmu MES
1
Zbudowanie sformułowania mocnego
2
Transformacja do sformułowania słabego
3
Wybór aproksymacji poszukiwanej funkcji
4
Wybór funkcji wagowej
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 1D
1
Zbudowanie sformułowania mocnego
!
d
dT
Ak
+f =0
dx
dx
xq = 0
+ warunki brzegowe
qx = qb
dla xq ( np. xq = 0)
T = Tb
dla xT ( np. xT = l)
2
Transformacja do sformułowania słabego
!
Z l
dw
dT
Ak
dx = −(wAqx )
+ (wA)
dx
0 dx
x=l
x=0
xT = l
Z
qb +
l
wf dx = 0
0
+ podstawowy warunek brzegowy
T = Tb
dla xT ( np. xT = l)
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 1D
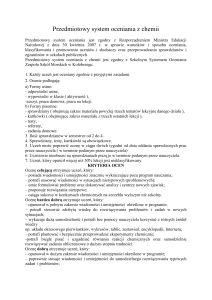
3
T
Ti
Wybór funkcji aproksymujących
Funkcja liniowa
Tj
xi
T e (x) = α1 + α2 x = Φαe α1
Φ = [1 x],
αe =
α2
T e (x) = Nie (xe )Ti + Nje (xe )Tj = Ne Θe
Ti
e
e e
e
e e
Θ =
N = [Ni (x ) Nj (x )],
Tj
dT e
= Be Θe ,
e
dx
"
Be =
dNe
dNie dNje
=
dxe
dxe dxe
xj x
le
Nie (xe )
1
xe
0e
le
Nje (xe )
#
1
xe
0
e
le
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 1D
3
T
Ti
Tj
Tk
Dobór funkcji aproksymacyjnych
Funkcja kwadratowa
T e (x) = α1 + α2 x + α3 x2 = Φαe
α1
Φ = [1 x x2 ],
αe = α2
α3
xi
Nie (xe )
1
T e (x) = Nie (xe )Ti + Nje (xe )Tj + Nke (xe )Tk
= N e Θe
Ti
Ne = [Nie (xe ) Nje (xe ) Nke (xe )], Θe = Tj
Tk
"
#
e
e dN e
e
dT e
dN
dN
dN
j
i
k
= Be Θe , Be =
=
e
e
e
e
e
dx
dx
dx dx dx
xj xk x
le
xe
e
0
xej
l
e
1
0e
xej le
Nke (xe )
0e
Nje (xe )
xe
1
xej le
c P.Pluciński
Metody obliczeniowe, 2015 xe
Dobór funkcji aproksymacyjnych – Zagadnienie 2D
1
Zbudowanie sformułowania mocnego
∇T (D∇T ) + f = 0 ∀x ∈ A
+ warunki brzegowe
qn = qT n = qb
T = Tb
2
na Γq
Γq
na ΓT
ΓT
Transformacja do sformułowania słabego (h - grubość powierzchni)
Z
Z
Z
Z
T
(∇w) Dh∇T dA = −
whb
q dΓ −
whqn dΓ +
whf dA
A
Γq
ΓT
A
+ podstawowy warunek brzegowy
T = Tb
na ΓT
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 2D
3
Wybór funkcji aproksymujących
T (x, y)
Element trójwęzłowy
e
T (x, y) = α1 + α2 x + α3 y = Φα
α1
Φ = [1 x y],
αe = α 2
α3
k
Tk
i
Ti
e
y
j
x
Tj
T e (x, y) = Nie (xe , y e )Ti + Nje (xe , y e )Tj +
i
+ Nke (xe , y e )Tk = Ne Θe
k
e
e
Ne = [Nie (xe , y e ) Nje (xe , y e ) Nke (xe , y e )],
Ti
Θe = Tj
Tk
x
c P.Pluciński
Metody obliczeniowe, 2015 j
ye
Dobór funkcji aproksymacyjnych – zagadnienie 2D
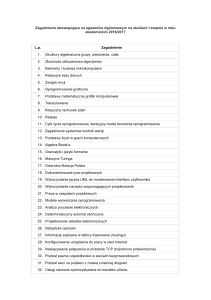
3
e.g. for Ni (xe , y e )
Ni (xei , yie ) = 1
Wybór funkcji aproksymujących
Element trójwęzłowy
Ni (xej , yje ) = 0
Ne = [Nie (xe , y e ) Nje (xe , y e ) Nke (xe , y e )]
Ni (xe , y e )
Nj (xe , y e )
Nk (xe , y e )
k
1
i
1
xe
Ni (xek , yke ) = 0
k
ye
k
i
1
xe
j
ye
j
ye
i
xe
Wyznaczenie współczynników funkcji kształtu
Ni (xe , y e ) = α1i + α2i xe + α3i y e
α1i =
1 xi yi
α1i
1
1 xj yj α2i = 0
=⇒ α2i =
1 xk yk
α3i
0
α3i =
j
xj yk −xk yj
2P4
yj −yk
2P4
xk −xj
2P4
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 2D
Trójkąt Pascala – element trójwęzłowy
1
y
x
x2
x3
x4
y2
xy
x2 y
x3 y
xy 2
x2 y 2
y3
xy 3
y4
Trójkąt Pascala – element sześciowęzłowy
1
y
x
x2
x3
x4
x2 y
x3 y
y2
xy
xy 2
x2 y 2
y3
xy 3
y4
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 2D
Kryteria zbieżności - wymagania dla aproksymacji
zupełność – aproksymacja musi być w stanie reprezentować dowolne
pole stałe i dowolny stały gradient pola
zgodność na granicach międzylementowych / styku elementów
(dostosowanie) – aproksymacja musi być ciągła na granicach między
elementami
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 2D
3
T (x, y)
Wybór funkcji aproksymujących
i
j
Tj
Element czterowęzłowy
T e (x, y) = α1e + α2e x + α3e y + α4e xy = Φαe
e
α1
α2e
Φ = [1 x y xy],
αe =
α3e
α4e
l
Ti
Tl
y
k
x
Tk
i
T e (x, y) = Nie (xe , y e )Ti + Nje (xe , y e )Tj +
j
+ Nke (xe , y e )Tk + Nle (xe , y e )Tl = Ne Θe
l
e
xe
Ne = [Nie (xe , y e ) Nje (xe , y e ) Nke (xe , y e ) Nle (xe , y e )]
Θe = {Ti Tj Tk Tl }
c P.Pluciński
Metody obliczeniowe, 2015 k
ye
Dobór funkcji aproksymacyjnych – zagadnienie 2D
3
e.g. for Ni (xe , y e )
Ni (xei , yie ) = 1
Wybór funkcji aproksymujących
Ni (xej , yje ) = 0
Element czterowęzłowy (prostokątny)
Ni (xek , yke ) = 0
Ne = [Nie (xe , y e ) Nje (xe , y e ) Nke (xe , y e ) Nle (xe , y e )]
)(y−yl )
Ni (x, y) = (x−xjab
i
1
e
l y
e j
x
a
b
k
Nj (x, y) =
j
i
xe
)(y−yk )
− (x−xiab
e
l y
1
b
)(y−yi )
Nl (x, y) = − (x−xkab
l
i
1 ye
e j
x
a
b
k
Nk (x, y) =
i
xe
a
Ni (xel , yle ) = 0
"
Be =
(x−xl )(y−yj )
ab
k
e
l y
j
1
b
∇T e = Be Θe
a
k
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 2D
Trójkąt Pascala – element czterowęzłowy
1
y
x
x2
x3
x4
y2
xy
x2 y
x3 y
xy 2
x2 y 2
y3
xy 3
y4
Trójkąt Pascala – element ośmiowęzłowy
1
y
x
x2
x3
x4
x2 y
x3 y
y2
xy
xy 2
x2 y 2
y3
xy 3
y4
c P.Pluciński
Metody obliczeniowe, 2015 ∂Ne
∂xe
∂Ne
∂y e
#
Dobór funkcji aproksymacyjnych – zagadnienie 3D
1
Zbudowanie sformułowania mocnego
∇T (D∇T ) + f = 0 ∀x ∈ V
+ warunki brzegowe
qn = qT n = qb
T = Tb
2
V
na Sq
ST
na ST
Sq
Transformacja do sformułowania słabego
Z
Z
Z
T
Z
wb
q dS −
(∇w) D∇T dV = −
V
Sq
wqn dS +
ST
wf dV
V
+ podstawowy warunek brzegowy
T = Tb
na ST
c P.Pluciński
Metody obliczeniowe, 2015 Dobór funkcji aproksymacyjnych – zagadnienie 3D
3
z
Wybór funkcji aproksymujących
j
Element czworościenny
l
e
T (x, y, z) =
α1e
+
α2e x
+
α3e y
+
y
α4e z
i
x
k
m
Element sześciościenny
n
i
T e (x, y, z) = α1e + α2e x + α3e y + α4e z+
+ α5e xy + α6e yz + α7e xz + α8e xyz
z
xj
c P.Pluciński
Metody obliczeniowe, 2015 p
o
l y
k