Analiza Algorytmów
Moduł 1
Podstawowe pojecia
˛ analizy algorytmów
Aleksandra Orpel
Spis treści
podstawowe
1 Pojecia
˛
1.1 Co to jest algorytm? . . . . . . . . . . . . .
1.2 Co to jest analiza algorytmów . . . . . . . .
1.3 Ocena przydatności algorytmu . . . . . . . .
1.3.1 Czas działania - złożoność czasowa .
1.3.2 Analiza przypadku pesymistycznego .
1.3.3 Analiza przypadku średniego . . . . .
.
.
.
.
.
.
matematyczne
2 Podstawowe narzedzia
˛
2.1 Funkcje podłogi i sufitu . . . . . . . . . . . . .
2.2 Szacowanie sum za pomoca˛ całek . . . . . . .
2.3 Notacja asymptotyczna . . . . . . . . . . . . .
2.3.1 Notacja ”o-małe” . . . . . . . . . . . .
2.3.2 Notacja ”O-duże” . . . . . . . . . . . .
2.3.3 Inne notacje asymptotyczne . . . . . .
3 Bibliografia
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
4
5
6
9
10
.
.
.
.
.
.
11
11
12
12
13
14
17
18
1
Pojecia
podstawowe
˛
1
1.1
Co to jest algorytm?
Algorytm jest ściśle określona˛ procedura˛ (na przykład obliczeniowa),
˛ która
dla właściwych danych wejściowych generuje żadane
dane wyjściowe. Algorytm
˛
możemy również traktować jako sposób rozwiazywania
konkretnego problemu.
˛
Postawienie problemu polega na sprecyzowaniu wymagań dotyczacych
relacji
˛
miedzy
danymi wejściowymi i wyjściowymi, a algorytm opisuje właściwa˛ procedure,
˛
˛
która zapewnia, że ta relacja zostanie osiagni
Dokładnie: algorytmem
˛ eta.
˛
nazywamy metode˛ (schemat) rozwiazywania
danego problemu, która spełnia
˛
nastepuj
˛ ace
˛ warunki:
1. - istnieje określony stan poczatkowy,
tj. operacja od której rozpoczyna sie˛
˛
jego działanie;
2. - ilość operacji potrzebnych do rozwiazania
problemu jest skończona - warunek
˛
dyskretności;
3. - musi istnieć możliwość stosowania metody do rozwiazania
całej klasy
˛
zagadnień, a nie tylko pojedynczego egzemplarza - warunek uniwersalności;
4. - interpretacja poszczególnych kroków metody musi być jednoznaczna warunek jednoznaczości;
5. - cel musi być osiagany
w pewnym skończonym i możliwym do przyjecia
˛
˛
przez użytkownika czasie - warunek efektywności;
6. - istnieje wyróżniony koniec.
Niektóre problemy nie posiadaja˛ algorytmicznych rozwiaza
˛ ń. Klasycznym
przykładem jest problem zatrzymania (halting problem), w którym algorytm
miałby orzekać, czy dany program komputerowy kiedykolwiek wykona wszystkie
procedury i zatrzyma sie.
˛ Danymi wejściowymi takiego algorytmu byłyby: program
komputerowy oraz dane wejściowe dla tego programu, zaś danymi wyjściowymi
prosta odpowiedź "tak" (program zatrzyma sie˛ po wykonaniu wszystkich zawartych
w nim poleceń) lub "nie" (program nie zatrzyma sie).
˛ Można pokazać, że nie
istnieje algorytm, który w skończonym czasie orzeknie, czy dany program dla
określonych danych wejściowych zapetli
˛ sie˛ czy nie.
Musimy przyja˛ć pewne ustalenia dotyczace
˛ zapisu badanych algorytmów.
Nie chcemy wykorzystywać jakiegoś wybranego jezyka
programowania, gdyż
˛
mogłoby to budzić watpliwo
ści, czy przedstawiamy analize˛ samego algorytmu,
˛
czy też jego konkretnej implementacji. Wobec tego posługiwać sie˛ bedziemy
˛
2
pewnym pseudojezykiem
(zbliżonym do Pascala), składajacym
sie˛ zarówno z
˛
˛
wyrażeń potocznych, jak i instrukcji, które powszechnie sa˛ używane w literaturze
poświeconej
algorytmice. Oto one:
˛
1. instrukcja podstawienia, np.
nazwa := a (zmienna nazwa przyjmuje wartość zmiennej a);
2. instrukcja warunkowa
if warunek then
begin
instrukcje realizowane, gdy warunek jest spełniony
end
else
begin
instrukcje realizowane, gdy warunek nie jest spełniony
end
3. instrukcja petli
˛ do-while oraz while-do
(a) do
begin
ciag
˛ instrukcji
end
while warunek
oraz
(b) while warunek do
begin
ciag
˛ instrukcji
end
4. instrukcja petli
˛ for
for i := 1 to 50 do
begin
ciag
˛ instrukcji (powtarzanych 50 razy)
end
Gdy do wykonania jest tylko jedna instrukcja czesto
˛ pomijamy begin i end.
3
1.2
Co to jest analiza algorytmów
Analiza algorytmów jest działem informatyki teoretycznej zajmujacym
sie˛
˛
poszukiwaniem najlepszych i najbardziej efektywnych algorytmów dla zadań
komputerowych. W powyższej definicji nie zostało jednak sprecyzowane, jaki
algorytm nazwiemy najefektywniejszym. Czy zawsze oznacza to da˛żenie do
znalezienia algorymu najszybszego, czy też wymagajacego
najmniejszych zasobów
˛
pamieci?
˛ Czy ważna jest również prostota algorytmu? Kryteria, jakimi kierujemy
sie˛ wybierajac
innymi
˛ najlepszy algorytm, zależa˛ od wielu czynników, miedzy
˛
od przeznaczenia i oczekiwań użytkowników.
Analiza algorytmu polega na określeniu zasobów, jakie sa˛ potrzebne do jego
wykonania. Zasobem zasadniczym jest dla nas czas działania, jednakże innymi
zasobami moga˛ być: pamie˛ć czy szerokość kanału komunikacyjnego. Za pomoca˛
teoretycznych rozważań chcemy zbadać zachowanie algorytmu bez konieczności
implementacji na komputerze. Oczywiście z reguły nie jesteśmy w stanie precyzyjnie
przewidzieć ilości zasobów koniecznych do realizacji algorytmu, gdyż jest zbyt
dużo zmiennych czynników. Zamiast tego, staramy sie˛ wyodrebni
˛ ć główne parametry
charakteryzujace
˛ algorytm i poddać je analizie. Przy takim podejściu pomijamy
wiele szczegółów dotyczacych
dokładnej implementacji, a nasza analiza jest
˛
jedynie przybliżona. Należy jednak pamieta
˛ ć, że naszym celem nie jest dokładne
określenie potrzebnych zasobów, a jedynie umożliwienie obiektywnego porównania
różnych algorytmów rozwiazania
tego samego problemu i wybranie spośród nich
˛
najlepszego dla naszych celów.
Badajac
˛ zadany problem zastanawiamy sie˛ najpierw, czy w ogóle jest możliwe
rowiazanie
go na komputerze w skończonym i możliwym do zaakceptowania
˛
przez programiste˛ (lub potencjalnych użytkowników) czasie oraz czy już istnieje
algorytm, który może zostać w danych okolicznościach zastosowany do rozważanego
zadania. Jeśli odpowiedzi na powyższe pytania sa˛ pozytywne, to należy rozstrzygna˛ć,
algorytmów jest
czy mamy jeszcze czego szukać, tj. czy któryś z istniejacych
˛
optymalny w naszym przypadku. Jeśli nie, to pracujac
˛ nad lepszym rozwiazaniem,
˛
należy zwrócić uwage˛ na to, w jaki sposób uzasadnić, że proponowany przez nas
nowy algorytm rozwiazuje
problem. Najważniejszym bowiem pytaniem, które
˛
pojawia sie,
˛ gdy zaczynamy prace˛ z nowym algorytmem jest pytanie o jego
poprawność.
Intuicyjnie rozumiemy, że algorytm jest poprawny, gdy dla każdego zestawu
danych wejściowych algorytm zatrzymuje sie˛ i daje dobry wynik. Algorytm
niepoprawny może sie˛ nigdy nie zatrzymać lub dać zły wynik (np. niepoprawny
algorytm sortowania może zwrócić jako wynik swego działania ciag,
˛ który nie
jest posortowany). Okazuje sie,
˛ że precyzyjne dowody poprawności bardziej
4
skomplikowanych algorytmów sa˛ niezwykle złożone i wykraczaja˛ poza ramy
tego skryptu. Choć oczywiście omówimy wybrane metody badania poprawności
prostszych algorytmów. Głównym narzedziem
wykorzystywanym do tego celu
˛
bedzie
twierdzenie o niezmiennikach petli.
(Wiecej
˛
˛
˛ o poprawności algorytmów
powiemy w Module 2.)
1.3
Ocena przydatności algorytmu
Ocena przydatności algorytmu zależy w dużej mierze od kontekstu, w jakim
bedzie
on użyty. Okazuje sie,
˛
˛ że czasem warto wykorzystać proste podejście i
nie konstruować bardziej skomplikowanych, choć zużywajacych
mniej zasobów
˛
schematów rozwiaza
˛ ń. Dzieje sie˛ tak na przykład wtedy, gdy algorytm ma być
użyty tylko kilka razy lub też, gdy jest on przeznaczony do pracy z danymi
wejściowymi o małym rozmiarze. W przypadku, gdy dana metoda ma być
stosowana wielokrotnie dla danych o dużych rozmiarach, warto szukać efektywniejszy
algorytmów.
Podstawowa˛ wielkościa,˛ która bedzie
stanowiła miare˛ przydatności algorytmu
˛
jest tzw. złożoność obliczeniowa, obejmujaca
z
˛ zarówno problemy zwiazane
˛
jego implementacja,˛ jak i sama˛ efektywność algorytmu. Pojecie
˛ to definiujemy
nastepuj
˛ aco:
˛
Definicja 1. Złożonościa˛ obliczeniowa˛ algorytmu nazywamy ilość zasobów
komputerowych, potrzebnych do jego realizacji, przy czym podstawowymi
zasobami rozważanymi w analizie algorytmów jest czas działania oraz
ilość potrzebnej pamieci.
˛
Da˛żymy do tego, aby złożoność obliczeniowa algorytmu była wyrażona jako
funkcja zależna od danych wejściowych, a dokładnie od rozmiaru danych
wejściowych - rozumianego jako liczba pojedynczych danych wchodzacych
˛
w skład całego zestawu danych wejściowych. Na przykład rozważajac
˛ problem
wyznaczania wartości wielomianu w punkcie, jako rozmiar danych wejściowych
przyjmujemy stopień tego wielomianu, w problemie wyznaczania n. potegi
˛ (n 2
to wykładnik tej potegi,
a gdy mówimy
N) liczby rzeczywistej a - bedzie
˛
˛
o mnożeniu dwóch liczb całkowitych, rozmiarem jest całkowita liczba bitów
potrzebnych do reprezentacji tych danych w postaci binarnej. Kiedy natomiast
zajmujemy sie˛ sortowaniem ciagu
˛ elementów, rozmiarem danych wejściowych
bedzie
liczba wyrazów ciagu,
a w przypadku zagadnienia przechodzenia drzewa
˛
˛
- liczba jego wezłów.
˛
W analizie algorytmów czesto
terminami: złożoność
˛ posługiwać sie˛ bedziemy
˛
5
pamieciowa
P(n) (lub pamieć,
˛
˛ przestrzeń) w odniesieniu do ilości zasobów
pamieci
˛ potrzebnych do realizacji danego algorytmu oraz złożoność czasowa
T(n) (lub czas). Obie te wielkości składaja˛ sie˛ na złożoność obliczeniowa˛ algorytmu.
Ilość przestrzeni zajmowanej przez algorytm jest zdeterminowana przez liczbe˛ i
rozmiar zmiennych oraz rodzaj danych. Natomiast czas zależy od liczby operacji,
które musza˛ być wykonane podczas działania algorytmu. Czesto
zdarza sie,
˛
˛ że
miedzy
czasem i przestrzenia˛ istnieje zależność odwrotnie proporcjonalna, tzn.
˛
jesteśmy w stanie zredukować rozmiar wymaganej przestrzeni kosztem wzrostu
ilości potrzebnego czasu i odwrotnie: redukcja czasu wymaga zwiekszenia
ilości
˛
pamieci.
˛
1.3.1
Czas działania - złożoność czasowa
Jednym ze sposobów mierzenia czasu działania algorytmu mógłby być pomiar za
pomoca˛ zegarka czasu realizacji zaimplementowanego algorytmu. Takie podejście
daje nam pewne wyobrażenie o tym, jak zmienia sie˛ czas działania algorytmu
w zależności od rozmiaru danych wejściowych, ale z wielu powodów nie może
to być wielkość decydujaca
˛ o ocenie przydatności danego algorytmu. Przede
wszystkim dlatego, że uzyskany wynik zależy od szybkości maszyny, na której
wykonywany jest program, jak również od zdolności jego autora. Nasza miara
szybkości algorytmu powinna być niezależna od oprogramowania i sprzetu,
˛ na
którym implementujemy algorytm oraz umiejetno
˛ ści programisty. Wobec tego
powinna być ona cecha˛ samego algorytmu, jako metody rozwiazania
problemu.
˛
Wprowadzamy zatem pojecie
˛ operacji dominujacych:
˛
nazywamy operacje charakterystyczne
Definicja 2. Operacjami dominujacymi
˛
dla danego algorytmu, których łaczna
liczba jest proporcjonalna do liczby
˛
wykonań wszystkich operacji jednostkowych w dowolnej komputerowej realizacji
algorytmu.
Dla przykładu w algorytmach wyznaczajacych
wartość wielomianu w zadanym
˛
punkcie operacjami dominujacymi
bed
˛
˛ a˛ operacje arytmetyczne, w algorytmach
sortowania - porównania elementów ciagu wejściowego, a czasem także przestawienia elementów tego ciagu.
Jeśli natomiast badamy algorytm przegladania
˛
˛
grafu, to jako operacje˛ dominujac
miedzy
˛ a˛ przyjmiemy przejście dowiazania
˛
˛
wezłami
w drzewie.
˛
Definicja 3. Za jednostke˛ złożoności czasowej przyjmujemy czas potrzebny do
wykonania jednej operacji dominujacej.
˛
Oczywiśnie nie zawsze jesteśmy w stanie określić dokładna˛ liczbe˛ operacji
dominujacych.
Czasem możemy jedynie ja˛ oszacować z dokładnościa˛ do stałego
˛
6
czynnika. Ponadto nie bedziemy
zajmować sie˛ zachowaniem algorytmów dla
˛
danych wejściowych o małych rozmiarach, gdyż w takich przypadkach z reguły
najlepsze sa˛ najprostsze rozwiazania.
Najważniejsza˛ cecha˛ prezentowanego przez
˛
nas podejścia jest ignorowanie stałych czynników i skupienie sie˛ na badaniu
zachowania algorytmu w przypadku, gdy rozmiar danych wejściowych da˛ży do
nieskończoności.
Jeżeli na przykład dany algorytm wykonuje 100n operacji dominujacych,
to
˛
pominiemy liczbe˛ 100 i powiemy, że jego złożoność czasowa jest rzedu
˛ n. Jeśli
natomiast w innym algorytmie liczba operacji dominujacych
jest równa 2n2 +50,
˛
to pominiemy 2 i 50 określajac
˛ rzad
˛ czasu działania jako n2 . Zatem podajemy
najprostsza˛ funkcje˛ charakteryzujac
˛ a˛ rzad
˛ wielkości T(n). Porównujac
˛ teraz
złożoność (czasowa)
˛ obu algorytmów rozważymy przypadek "dużego" n, a ponieważ
2
od n stwierdzimy, że drugi algorytm jest wolniejszy, chociaż na
n jest wieksze
˛
przykład dla n = 3 mamy 2 ¢ 32 + 50 < 100 ¢ 3. (Oczywiście n oznacza liczbe˛
naturalna.)
˛ Stad
˛ powyższy wniosek jest słuszny dla "dostatecznie dużych" n,
w naszym przypadku wystarczy przyja˛ć n ¸ 50. Wobec tego posługiwać sie˛
bedziemy
pojeciem
asymptotycznego czasu działania, dla podkreślenia, iż
˛
˛
chodzi nam o czas działania algorytmu dla danych wejściowych, których rozmiar
da˛ży do nieskończoności.
Wiekszo
ść badanych przez nas algorytmów ma złożoność czasowa˛ (tj. asymptotyczn
˛
czas działania) proporcjonalna˛ do jednej z podanych poniżej funkcji:
1. złożoność logarytmiczna:
lg n,
2. złożoność liniowa:
n,
3. złożoność liniowo-logarytmiczna:
n lg n,
4. złożoność kwadratowa:
n2 ,
5. dalsze złożoności wielomianowe:
n3 , n4 , ...,
6. złożoność podwykładnicza:
2
nlg n = 2lg n ,
7
7. złożoność wykładnicza typu 2n :
2n ,
8. złożoność wykładnicza typu n! :
n! .
Warto zauważyć, iż algorytm o złożoności wykładniczej może być stosowany
jedynie dla danych wejściowych o małych rozmiarach, co wynika z własności
funkcji wykładniczej. Okazuje sie˛ bowiem, że istnieje pewna progowa wartość
argumentu, od której funkcja wykładnicza zaczyna rosna˛ć na tyle szybko, że
implementacja algorytmu na komputerze staje sie˛ niemożliwa. Dla przykładu
rozważmy algorytm, który dla danych wejściowych o rozmiarze n wykonuje 2n
operaci dominujacych.
Poniżej podajemy tabelke˛ przedstawiajac
˛
˛ a˛ czas potrzebny
do realizacji tego algorytmu przez dwa komputery przy założeniu, że jedna operacja na każdym z nich zajmuje odpowiednio 10¡6 i 10¡9 sekund.
Rozmiar danych wejściowych (n)
20
50
Czas działania na pierwszym
1.04 s 35, 7 lat
komputerze (2n ¢ 10¡6 )
Czas działania na drugim
10¡3 s 13 dni
komputerze (2n ¢ 10¡9 )
100
4 ¢ 1014
wieków
4 ¢ 1011
wieków
200
5 ¢ 1044
wieków
5 ¢ 1041
wieków
Oczywiście zawsze chcemy znaleźć najszybsze rozwiazanie
zadanego problemu.
˛
Wobec tego majac
˛ pewien algorytm pytamy, czy można jeszcze szybciej osiagn
˛ a˛ć
cel, czy też złożoność czasowa naszego algorytmu już osiagn
˛ eła
˛ wartość najmniejsza˛
z możliwych. W wielu przypadkach potrafimy znaleźć teoretyczne dolne oszacowa
liczby operacji dominujacych
potrzebnych do rozwiazania
problemu. Na przykład
˛
˛
pokażemy, że dla algorytmów sortowania opartych na porównywaniu elementów
takie oszacowanie jest rzedu
˛ n lg n, gdzie n jest liczba˛ sortowanych elementów.
Zwykle wynika ono z analizy teoretycznych ograniczeń zwiazanych
z danym
˛
problemem. Można także rozważać tzw. trywialne dolne oszacowanie. Dla
powyższego probelmu sortowania opartego na porównaniach rzad
˛ trywialnego
dolnego oszacowania jest równy n. Natomiast problem mnożenia dwóch macierzy
wymiaru n £ n ma trywialne dolne oszacowanie rzedu
˛ kwadratowego.
Mówimy również o tzw. zakresie (przedziale) czasów działania algorytmów.
W ten sposób określamy przedział miedzy
teoretycznym dolnym oszacowaniem,
˛
a najlepszym znanym algorytmem:
8
"
j
czas j
j
j
czas działania najlepszego znanego algorytmu
l
teoretyczne dolne oszacowanie złożoności czasowej
trywialne dolne oszacowanie złożoności czasowej
Jeżeli wiemy, że dany algorytm osiaga
˛ w asymptotycznym sensie dolne ograniczenie
to przynajmniej dla "dużych" danych wejściowych żaden algorytm nie może być
szybszy. Nie oznacza to jeszcze, że nie można poprawić takiego rozwiazania.
˛
Może sie˛ bowiem zdarzyć, że w jego asymptotycznym czasie kryje sie˛ bardzo
duża stała lub też, że asymptotyczne oszacowanie można zastosować tylko wtedy,
gdy dane wejściowe sa˛ bardzo duże. Dla niektórych ważnych problemów teoretyczne
dolne oszacowanie nie zostało jeszcze wyznaczone. W takim przypadku punktem
odniesienia staje sie˛ najszybszy istniejacy
˛ algorytm rozwiazuj
˛ acy
˛ dany problem.
Wprowadzimy teraz pewne oznaczenia, które pozwola˛ nam precyzyjnie zdefiniować pesymistyczna˛ i średnia˛ (oczekiwana)
˛ złożoność czasowa:˛
1. ZDWn - zbiór zestawów danych wejściowych rozmiaru n;
2. l(zdw) - liczba operacji dominujacych
dla zestawu danych wejściowych
˛
zdw 2 ZDWn ;
3. Xn - zmienna losowa, której wartościa˛ jest l(zdw) dla zdw 2 ZDWn;
4. pnk - rozkład prawdopodobieństwa zmiennej losowej Xn , tj. prawdo- podobieństwo
że dla danych wejściowych rozmiaru n algorytm wykona k operacji dominujacych
˛
1.3.2
Analiza przypadku pesymistycznego
W wielu algorytmach czas działania zależy nie tylko od rozmiaru danych wejściowych
i może on przyjmować różne wartości dla różnych danych wejściowych o tym
samym rozmiarze. Wówczas interesuje nas złożoność obliczeniowa w najgorszym
przypadku określona nastepuj
˛ aco:
˛
Definicja 4. Pesymistyczna˛ złożoność czasowa˛ Tmax (n) algorytmu definiujemy
jako maksymalny czas działania algorytmu po wszystkich możliwych danych
wejściowych o rozmiarze n
Tmax (n):= sup fl(zdw),zdw 2 ZDWn g.
Czesto
˛ analizujac
˛ zachowanie algorytmu posługujemy sie˛ właśnie przypadkiem
pesymistycznym określajac
˛ czas działania algorytmu, co gwarantuje, że algorytm
9
nigdy nie bedzie
działał dłużej. W niektórych problemach przypadek pesymistyczny
˛
pojawia sie˛ dosyć czesto.
Warto jednak pamieta
˛
˛ ć, że może sie˛ zdarzyć, iż algorytm
o pesymistycznej złożoności czasowej rzedu
dla wiekszo
ści danych
˛ n lg n bedzie
˛
˛
wejściowych działał wolniej niż algorytm o pesymistycznym czasie działania
rzedu
˛ n2 .
Istnieja˛ algorytmy o pesymistycznej złożoności czasowej rzedu
˛ wykładniczego,
które dla przeważajacej
cze˛ści danych wejściowych bed
˛
˛ a˛ działać szybciej niż
algorytm o złożoności wielomianowej. Na przykład metoda simplex programowania
liniowego, której pesymistyczna złożoność czasowa jest wykładnicza, dla wiekszo
ści
˛
pojawiajacych
sie˛ w praktyce danych wejściowy działa w czasie wielomianowym,
˛
a nawet liniowym. Zatem analiza przypadku pesymistycznego nie daje nam
pełnego obrazu zachowania sie˛ algorytmu. Aby dokładniej zbadać na ile wielkość
Tmax (n) odzwierciedla rzeczywisty czas działania algorytmu dla wszystkich
danych wejściowych rozważa sie˛ miary wrażliwości algorytmu:
Definicja 5. Miara˛ wrażliwości pesymistycznej algorytmu nazywamy wielkość
∆(n) = supfl(zdw1 ) ¡ l(zdw2 ), zdw1 , zdw2 2 ZDWn g.
1.3.3
Analiza przypadku średniego
Niezwykle ważnym jest pytanie o zachowanie algorytmu dla losowych danych
wejściowych. Pojawia sie˛ wówczas pojecie
˛ średniej (lub oczekiwanej) złożoności.
Definicja 6. Oczekiwana˛ złożonościa˛ czasowa˛ algorytmu nazywamy wartość
oczekiwana˛ zmiennej losowej Xn
X
Ts¶r (n) = E [Xn ] =
kpnk .
k¸0
Definicja 7. Miara˛ wrażliwości oczekiwanej algorytmu nazywamy wielkość δ(n)
bed
˛ ac
˛ a˛ odchyleniem standardowym zmiennej losowej Xn , tj.
δ(n) = dev [Xn ] .
p
Przypomnijmy, że dev [Xn ] = var [Xn ], gdzie wariancja zmiennej losowej
Xn dana jest nastepujaco
˛
var [Xn ] = E[(Xn ¡ E [Xn ])2 ].
Uwaga: Wielkości ∆(n) i δ(n) informuja˛ nas o tym, jak bardzo zachowanie
algorytmu dla rzeczywistych danych wejściowych może odbiegać od zachowania
opisanego za pomoca,
˛ odpowiednio pesymistycznej i oczekiwanej złożoności
czasowej. Im wieksze
sa˛ wartości ∆(n) i δ(n) tym algorytm jest bardzej wrażliwy
˛
na dane wejściowe.
10
2
2.1
Podstawowe narzedzia
matematyczne
˛
Funkcje podłogi i sufitu
W wielu przypadkach wyznaczenie liczby operacji dominujacych
zwiazane
jest z
˛
˛
wykorzystaniem własności cze˛ści całkowitych liczb rzeczywistych. Przypomnijmy
zatem definicje funkcji podłogi i sufitu oraz podstawowe ich własności.
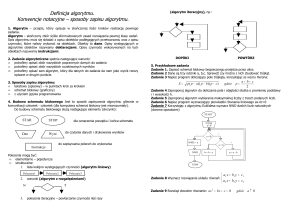
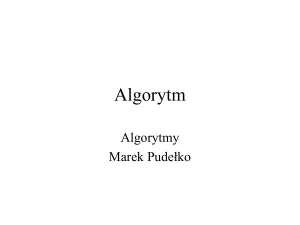
Definicja 8. Funkcja˛ podłogi nazywamy funkcje˛ x 2 R ! bxc 2 Z przyporzadkow
˛
liczbie rzeczywistej x najwieksz
˛ a˛ liczbe˛ całkowita˛ nie wieksz
˛ a˛ niż x.
y
4
2
0
-5
-2.5
0
2.5
5
x
-2
-4
Rys. 1. Wykres funkcji f (x) = bxc
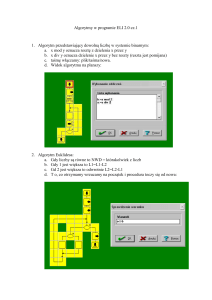
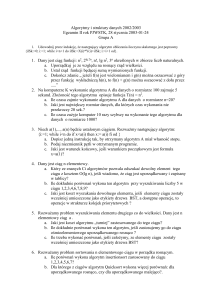
Definicja 9. Funkcja˛ sufitu nazywamy funkcje˛ x 2 R ! dxe 2 Z przyporzadkowuja
˛
liczbie rzeczywistej x najmniejsza˛ liczbe˛ całkowita˛ nie mniejsza˛ niż x.
y
4
2
0
-5
-2.5
0
2.5
5
x
-2
-4
Rys. 2. Wykres funkcji f (x) = dxe
11
Stwierdzenie 10. Podstawowe własności funkcji sufitu i podłogi. Dla
dowolnych liczb x 2 R oraz n, a, b 2 Z takich, że a 6= 0 i b 6= 0 zachodza˛
nastepuj
˛ ace
˛ zależności:
1. x ¡ 1 < bxc · x · dxe < x + 1.
2. bxc = n wtedy i tylko wtedy, gdy n · x < n + 1.
3. dxe = n wtedy i tylko wtedy, gdy n ¡ 1 < x · n.
¥ ¦ § ¨
4. n2 + n2 = n.
5. ddn/ae /be = dn/(ab)e .
6. bbn/ac /bc = bn/(ab)c .
2.2
Szacowanie sum za pomoca˛ całek
Podamy teraz proste i bardzo szykie kryterium szacowania sum za pomoca˛
całek. Należy tu zwrócić uwage˛ na fakt, iż w czasie wyznaczania dokladnych
oszacowań niektórych wielkości (np. n. liczby harmonicznej) możemy w poniższych
wzorach otrzymać całki niewłaściwe rozbiezne, co strywializuje otrzymane oszacoawan
dajac
˛ np. ograniczenie górne sumy poprzez +1. W cze˛ści drugiej modułu
pokażemy jak należy postepowa
ć w takich sytuacjach.
˛
Twierdzenie 11. Niech dany bedzie
przedział domkniety
˛
˛ [a, b], 0 < a < b,
m < n, takie, że m ¡ 1, n + 1 2 [a, b], oraz funkcja f : [a, b] ! [0, +1) ciagła.
˛
Wówczas
(i) jeżeli f jest rosnaca
˛ w (a, b), to
Zn
m¡1
f (x)dx ·
n
X
k=m
f (k) ·
n+1
Z
f (x)dx;
Zn
f (x)dx.
m
(ii) jeżeli f jest malejaca
˛ w (a, b), to
n+1
Z
m
2.3
f (x)dx ·
n
X
k=m
f (k) ·
m¡1
Notacja asymptotyczna
Implementujac
˛ algorytm możemy zauważyć, że jego rzeczywista złożoność czasowa
w chwili użycia jako programu różni sie˛ od wyliczonej teoretycznie współczynnikiem
12
proporcjonalności, zwiazanym
ze sposobem realizacji: zastosowanym jezykiem
˛
˛
programowania, jakościa˛ sprzetu
˛ i umiejetno
˛ ściami programisty. Zatem określajac
˛
pesymistyczna˛ lub średnia˛ złożoność chcemy podawać tylko naj- ważniejsza˛
cze˛ść informacji pochodzacych
z teoretycznych wyliczeń, a mianowicie rzad
˛
˛
wielkości. Określa on zachowanie funkcji opisujacej
˛ złożoność czasowa˛ algorytmu
dla dużych wartości argumentu (dla danych o dużym rozmiarze). Mówimy
wtedy o asymptotycznym czasie (złożoności czasowej). Ponieważ badane przez
a,˛ musza˛ przyjmować
nas funkcje maja˛ określać złożoność czasowa˛ lub pamieciow
˛
wartości dodatnie, przynajmniej dla dostatecznie dużych argumentów. Takie
funkcje nazwiemy asymptotycznie dodatnimi. Oto dokładna definicja:
Definicja 12. Funkcje˛ f : N ! R nazywamy asymptotycznie dodatnia,˛ gdy
istnieje liczba n0 2 N taka, że dla wszystkich n > n0 zachodzi nierówność
f (n) > 0.
Założenie: W całym rozdziale zakładamy, że rozważamy funkcje asymptotycznie
dodatnie o argumentach bed
liczbami naturalnymi lub zerem. Założenia
˛ acych
˛
tego nie bedziemy
powtarzać w dalszej cze˛ści tego skryptu.
˛
2.3.1
Notacja ”o-małe”
Definicja 13. Piszemy
f (n) = o(g(n)),
gdy dla dowolnej stałej c > 0 istnieje n0 2 N takie, że
0 < f (n) · cg(n)
dla wszystkich n ¸ n0 .
Intuicyjnie, zapis f (n) = o(g(n)) oznacza to, że f (n) jest pomijalna wzgledem
˛
g, gdy n da˛ży do nieskończoności.
f (n)
n!1 g(n)
Twierdzenie 14. Jeżeli lim
= 0, to f (n) = o(g(n)).
Dowód: Niech c > 0. Z założenia istnieje n0 , takie, że dla n > n0
f (n)
< c.
g(n)
Ponieważ obie funkcje sa˛ asymptotycznie dodatnie, istnieje n1 takie, że dla
n > n1 f (n) > 0 i g(n) > 0. Ostatecznie otrzymujemy nierówność
0 < f (n) · cg(n)
13
dla n > maxfn0 , n1 g. ¥
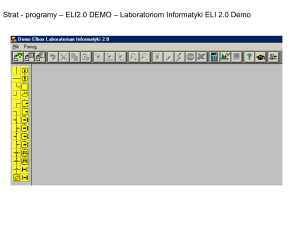
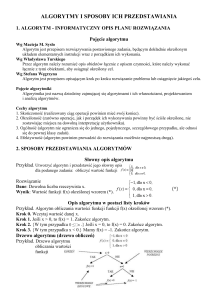
p
Przykład 1. lg n = o( n), istotnie limn!1 lgpnn = 0, co ilustruje rysunek
y
10
5
0
0
25
50
75
100
x
-5
-10
Rys. 3.
Wykresy funkcji f(x)=
p
lgx (czerwony) i g(x)= x (zielony)
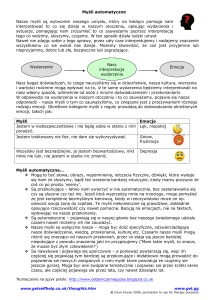
Gdy zwiekszymy
zakres argumentów "pomijalność" funkcji f (x) = lg x wzgledem
˛
p˛
g(x) = x dla "dużych" argumentów jest jeszcze bardziej widoczna.
y
100
75
50
25
0
0
2500
5000
7500
1e+4
x
Rys. 4.
2.3.2
Wykresy funkcji f(x)=
p
lgx (czerwony) i g(x)= x (zielony)
Notacja ”O-duże”
Definicja 15. Piszemy
f(n) = O(g(n)),
gdy istniej a˛ c > 0, n0 2 N takie, że
0 < f (n) · cg(n)
dla wszystkich n¸ n0 . (Mówimy wówczas, że f jest co najwyżej rzedu
˛ g.)
14
(n)
Twierdzenie 16. Jeżeli lim fg(n)
= k ¸ 0, to f (n) = O(g(n)).
n!1
(n)
Dowód. Założenie lim fg(n)
= k ¸ 0 można zapisać nastepuj
˛ aco:
˛ dla dowolnego
n!1
ε > 0 istnieje n0 2 N takie, że dla dowolnych n > n0 zachodzi nierówność
¡ε ·
f (n)
¡ k · ε.
g(n)
(1)
Przypomnijmy jednocześnie, że funkcje f i g sa˛ asymptotycznie dodatnie, zatem
istnieje n1 2 N takie, że dla dowolnych n > n1 f (n) > 0 i g(n) > 0. Wobec
tego kładac
˛ c = ε + k i n = maxfn0 , n1 g, mamy dla n > n (tj. n na tyle dużych,
aby f i g przyjmowały dla nich wartości dodatnie i aby zachodziała nierówność
(1)) otrzymujemy
0 < f (n) · cg(n),
a to z definicji oznacza, że f (n) = O(g(n)).¥
n
= 1, co ilustruje rysunek
Przykład 2. n+lg n = O(n), istotnie limn!1 n+lg
n
5.
y
150
125
100
75
50
25
0
0
12.5
25
37.5
50
x
Rys. 5.
Wykresy funkcji f(x)=x+
lgx (czerwony) i g(x)=x
(zielony)
Czesto
˛ w literaturze informatycznej podaje sie˛ powyższe twierdzenie zamiast
definicji 15 "O-dużego". Należy jednak zauważyć, że definicja 15 obejmuje
(n)
, wystepuj
również przypadki, w których założenie istnienia granicy ilorazu fg(n)
˛ ace
˛
w twierdzeniu, nie jest spełnione. Ilustruje to nastepuj
˛ acy
˛ przykład: można
wykazać, że jcos nj = O(1). Istotnie, połóżmy c = 1 n0 = 1. Wówczas dla
dowolnego n > n0 zachodzi nierówność
j cos nj · 1,
15
co należało wykazać. W tym przypadku nie można było jednak zastosować
twierdzenia 16, gdyż granica
f (n)
j cos nj
= lim
n!1 g(n)
n!1
1
lim
nie istnieje.
Twierdzenie 17. Jeśli f (n)=o(g(n)) , to f (n) = O(g(n)).
Dowód: Uzasadnienie tego faktu wynika bezpośrednio z definicji obu notacji.
Twierdzenie 18. Własności notacji ”O-duże”
1. Jeżeli f (n) = O(g(n)) i c>0, to
cf (n) = O(g(n)).
2. Jeżeli f (n) = O(g(n)) i h(n) = O(g(n)), to
f (n) + h(n) = O(g(n)).
3. Jeżeli f (n) = O(g(n)) i h(n) = O(z(n)),to
f (n) ¢ h(n) = O(g(n) ¢ z(n)).
4. Jeżeli f (n) = O(g(n)) i g(n) = O(z(n)),to
f (n) = O(z(n)).
5. Jeżeli f (n) = O(g(n)) i h(n) = O(z(n)),to
f (n) + h(n) = O(maxfg(n), z(n)g)
oraz
f (n) + h(n) = O(g(n) + z(n)).
Dowód: Dowody własności 1-3 pozostawiamy jako ćwiczenia.
(4) Wobec założeń istnieja˛ c1 > 0, n1 2 N oraz c2 > 0, n2 2 N takie, że
0 < f (n) · c1 g(n) dla wszystkich n ¸ n1
0 < g(n) · c2 z(n) dla wszystkich n ¸ n2 .
Weźmy n0 = maxfn1 , n2 g oraz c = c1 c2 . Wówczas dla n > n0 zachodzi
0 < f (n) · c1 g(n) · cz(n).
16
(5) Z założenia istnieja˛ c1 > 0, n1 2 N oraz c2 > 0, n2 2 N takie, że
0 < f (n) · c1 g(n) dla wszystkich n ¸ n1
0 < h(n) · c2 z(n) dla wszystkich n ¸ n2 .
Połóżmy n0 = maxfn1 , n2 g. Wówczas dla n > n0
0 < f (n) + h(n) · c1 g(n) + c2 z(n) ·
(c1 + c2 ) maxfg(n), z(n)g
¥
Należy pamieta
dodawania
˛ ć, że nie można przenieść własności 3. i 5. (dotyczacych
˛
i mnożenia rzedów
wielkości) na operacje odejmowania i dzielenia. Rozważmy
˛
6
funkcje f(n) = n , g(n) = n6 , h(n) = n2 , z(n) = n3 . Wówczas f (n) = O(g(n))
(n)
= O( g(n)
i h(n) = O(z(n)), ale zależność fh(n)
z(n) ) nie jest prawdziwa, gdyż
jest ona równoważna stwierdzeniu n4 = O(n3 ), które jest fałszywe. Oczywiście
możemy podać również funkcje, dla których odpowiednie równości zachodza.˛
Dla przykładu połóżmy f, g, h jak wyżej i z1 (n) = n2 . Wówczas uzyskujemy już
(n)
= O( zg(n)
). Zatem w przypadku dzielenia trzeba być
prawdziwa˛ równość fh(n)
1 (n)
ostrożnym w posługiwaniu sie˛ notacja˛ "O-duże".
2.3.3
Inne notacje asymptotyczne
Definicja 19. Piszemy
f (n) = Θ(g(n)),
gdy istnieja˛ c1 > 0, c2 > 0, n0 2 N takie, że c1 g(n) · f (n) · c2 g(n) dla
wszystkich n ¸ n0 . Mówimy wtedy, że g(n) jest asymptotycznie dokładnym
oszacowaniem funkcji f(n) lub f jest dokłanie rzedu
˛ g.
Podamy teraz kilka twierdzeń opisujacych
własności wprowadzonych notacji i
˛
zależności miedzy
nimi. Proste dowody tych faktów pozostawiamy czytelnikowi
˛
jako ćwiczenie.
Twierdzenie 20. Własności 1¡5 notacji "O¡duże" przenosza˛ sie˛ bezpośrednio
na notacje˛ Θ.
Twierdzenie 21. Jeżeli lim
f (n)
n!1 g(n)
= k > 0, to f(n) = Θ(g(n)).
Definicja 22. Piszemy
f (n) = Ω(g(n))
gdy istnieja˛ c > 0, n0 2 N takie, że 0 < cg(n) · f (n) dla wszystkich n
¸ n0 . (Mówimy wówczas, że f jest co najmniej rzedu
˛ g.)
17
f (n)
n!1 g(n)
Twierdzenie 23. Jeżeli lim
Twierdzenie 24.
Θ(g(n)).
= 1, to f (n) = Ω(g(n)).
Jeżeli f (n) = Ω(g(n)) i f (n) = O(g(n)), to f (n) =
Definicja 25. Mówimy, ze f i g sa˛ funkcjami asymptotycznie równymi, gdy
g(n) ¡ f (n) = o(f (n)). Piszemy wówczas g(n) » f (n).
3
Bibliografia
1. Banachowski L., Diks K., Algorytmy i struktury danych; Wydawnictwo
Naukowo-Techniczne, Warszawa 1996.
2. Banachowski L., Kreczmar A., Elementy analizy algorytmów, Wydawnictwo
Naukowo-Techniczne, Warszawa 1982.
3. Cormen T.H., Leiserson Ch.E., Rivest R.L., Wprowadzenie do algorytmów,
Wydawnictwo Naukowo-Techniczne, Warszawa, 2001.
4. Knuth D.E., Sztuka programowania, t. 1, Wydawnictwo Naukowo-Techniczne,
Warszawa 2002.
5. Manber U., Introduction to Algorithms, Addison-Wesley Publishing Company,
New York, 1989.
6. Sedgewick R., Flajolet P., An introduction to the Analysis of Algorithms,
Addison-Wesley Publishing Company, New York, 1996.
18