Rozdzielnica elektryczna
1
OPIS SZAFKI STEROWNICZEJ
SPIS TREŚCI
SPIS TREŚCI ............................................................................................................. 1
2.
WSTĘP.
2
3. OPIS SZAFKI STEROWNICZEJ ............................................................................ 2
3.1. OBUDOWA. ......................................................................................................... 2
3.2. STANDARDOWE WYPOSAŻENIE SZAFY STEROWNICZEJ. .......................... 2
3.3 REALIZOWANE FUNKCJE. ................................................................................. 2
3.4 KONTROLA TEMPERATURY WEWNĄTRZ SZAFY STEROWNICZEJ .............. 3
3.5 SAMOCZYNNE STARTOWANIE W PRZYPADKU ZANIKU I POWROTU
ZASILANIA ......................................................................................................... 3
3.6 WYBÓR TRYBU PRACY...................................................................................... 3
3.7 SYGNALIZACJA POZIOMU ŚCIEKÓW ............................................................... 3
4. ZABEZPIECZENIE PRZECIWZWARCIOWE I PRZECIWPRZECIĄŻENIOWE. .... 4
5. ALGORYTM DZIAŁANIA. ....................................................................................... 4
6. SYSTEM STEROWANIA I MONITOROWANIA PRZEPOMPOWNI ŚCIEKÓW W
TRYBIE ONLINE W OPARCIU O TRANSMISJĘ GPRS. ................................... 5
Rozdzielnica elektryczna
2
2. WSTĘP.
Szafa telemetryczna poszerza funkcjonalność przepompowni ścieków o szereg
dodatkowych możliwości teletechnicznych, które w skrócie można nazwać systemem zdalnej
wizualizacji pracy obiektów rozproszonych.
3. OPIS SZAFKI STEROWNICZEJ
3.1. Obudowa.
Rozdzielnica wykonana winna być w obudowie metalowej malowanej proszkowo o
wymiarach min. 500 x 500 x 300 mm. Zapewnić stopień ochrony IP66. Kable podłączane są
do listwy zaciskowej na dolnej szynie linii. Rozdzielnica mocowana jest za pomocą stopy
metalowej na posadowieniu betonowym.
3.2. Standardowe wyposażenie szafy sterowniczej.
Wyposażenie szafy obejmuje:
-
gniazda 230V,
-
sterownik np.: ABMICRO typu MT-101 lub inny o nie gorszych parametrach z
kompletnym oprogramowaniem do wizualizacji i zdalnego sterowania pracą
przepompowni,
-
sonda hydrostatyczna APLISENS SG-25S, lub inna o nie gorszych parametrach,
-
dwa pływaki do sygnalizacji stanów alarmowych,
-
zasilacz i akumulator do podtrzymania pracy sterownika,
-
grzałka, czujnik temperatury,
-
aparatura do sterowania i automatyki (przekaźniki pomocnicze, krańcówka,
przyciski, przełączniki).
3.3 Realizowane funkcje.
Naprzemienna praca pomp.
Elementem odpowiedzialnym za realizację tej funkcji jest sterownik ABMICRO.
Sterownik analizuje sygnał z sondy hydrostatycznej i w każdym z cykli roboczych załącza
pompę, która w poprzednim cyklu nie pracowała.
Rozdzielnica elektryczna
3
Równoległa praca pomp (opcja).
Elementem odpowiedzialnym za realizację tej funkcji jest sterownik ABMICRO,
który po przekroczeniu przez medium poziomu ustalonego jako MAX_ALARM załącza do
pracy drugą pompę. Jeżeli stan MAX_ALARM utrzymuje się przez okres dłuższy niż cztery
minuty następuje załączenie sygnalizacji alarmowej.
3.4 Kontrola temperatury wewnątrz szafy sterowniczej
Rozdzielnica powinna posiadać wewnętrzny układ grzewczy w postaci grzałki
elektrycznej i regulatora temperatury TH, utrzymującym temperaturę wewnątrz na poziomie
dodatnim.
3.5 Samoczynne startowanie w przypadku zaniku i powrotu zasilania
Funkcja aktywna tylko w trybie automatycznym. Elementem odpowiedzialnym za
realizację tej funkcji jest sterownik ABMICRO. W przypadku całkowitego zaniku zasilania
sieciowego, zasilanie modułu MT-101, sondy hydrostatycznej jak i obwodu czujników
otwarcia szafki sterowniczej jest realizowane przez zainstalowany akumulator. Wystarcza on
na kilka godzin pracy, umożliwiając transmisję danych do centrum systemu monitoringu.
3.6 Wybór trybu pracy
Praca pomp może odbywać się w dwóch trybach:
Pozycja II – cykl pracy automatycznej realizowanej przez sterownik,
Pozycja I lub 0 – cykl pracy ze sterowaniem pierwotnym przepompowni – tzw. „stare
sterowanie”. Po wybraniu tej pozycji dostępne jest również pierwotne sterowanie w
trybie ręcznym.
Wybór sposobu pracy wykonuje się za pomocą przełącznika S1.
3.7 Sygnalizacja poziomu ścieków
Program sterownika w celu analizy poziomu ścieków w zbiorniku wykorzystuje –
sondę hydrostatyczną oraz dwa pływaki alarmowe. Informacja o poziomie ścieków jest
otrzymywana po analizie sygnału analogowego 4 - 20mA z sondy przez sterownik
ABMICRO. Poziom sygnału odpowiadający poziomom MAX i MIN określany jest przez
Rozdzielnica elektryczna
4
program sterownika. Standardowo należy wykorzystać sondy firmy APLISENS. Sygnał
alarmowy otrzymywany jest z pływaków zamocowanych tak by zwarcie styków pływaków
sygnalizowało stan alarmowy
4. Zabezpieczenie przeciwzwarciowe i przeciw przeciąrzeniowe.
Obwody sterownicze zabezpieczyć wyłącznikiem nadmiaroprądowym typ C60N o
charakterystyce C.
F1– C60N C2A 1P – zabezpieczenie obwodu sterowania pompy 1,
5. Algorytm działania.
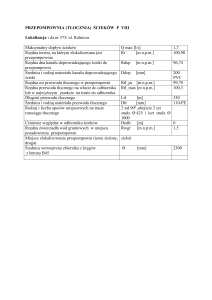
Regulatory pływakowe rozmieszczone są w przepompowni w następujący sposób:
Warunki pracy normalnej:
Pływaki R1 i R4 w dole – wyłączona praca pomp.
1. Wzrost poziomu ścieków w zbiorniku:
Pływak R1 w górze i poziom ścieków określony pomiędzy poziomem MIN i
MAX, R4 w dole – pompy nie pracują (gotowe do pracy).
2. Dalszy wzrost poziomu ścieków w zbiorniku:
Pływak R1 w górze, poziom ścieków powyżej poziomu MAX, R4 w dole –
załączenie pierwszej pompy (P1 pracuje).
ALARM
R4
MAX
MIN
SUCHOBIEG
R1
Rozdzielnica elektryczna
5
3. Obniżenie poziomu ścieków:
Pływak R1 w górze, poziom ścieków pomiędzy poziomem MIN i MAX, R4 w
dole – pompa P1 nadal pracuje.
4. Dalsze obniżanie poziomu ścieków:
Pływak R1 w górze, poziom ścieków poniżej poziomu MIN wyłączenie pracującej
pompy P1.
5. Następny cykl (wg punktów 1, 2, 3, 4) uruchamia pompę P2 (wcześniej nie
pracującą), a dalszy cykl załącza pompę P3 – praca naprzemienna pomp.
Sytuacja awaryjna:
W przypadku awarii jednej z pomp lub jej toru zasilającego, druga pompa pracuje
każdorazowo po podniesieniu się poziomu ścieków w zbiorniku (wg. punktu 1, 2, 3, 4)
Sytuacja alarmowa:
W przypadku pracy jednej pompy gdy poziom ścieków wciąż się zwiększa załączając pływak
R4 sygnalizujący poziom ALARM następuje załączenie drugiej pompy w celu szybszego
opróżnienia zbiornika i niedopuszczenia do jego przepełnienia. W tej sytuacji nastąpi
opróżnienie zbiornika aż do poziomu suchobiegu sygnalizowanego przez opuszczony pływak
R1.
Również w sytuacji gdyby nastąpiło uszkodzenie sondy hydrostatycznej w przypadku
poziomu alarmowego ścieków w zbiorniku nastąpi załączenie pomp w celu wypompowania
medium.
6. System sterowania i monitorowania przepompowni ścieków w trybie
ONLINE w oparciu o transmisję GPRS.
System sterowania i wizualizacji winien składać się:
Zaprogramowanego sterownika wyposażonego w 16 konfigurowalnych wejść / wyjść
cyfrowych, 2 wejścia analogowe 4–20 mA, modem GSM z funkcją trybu GPRS;
Akumulator buforujący 12V/1,2Ah, umożliwiający utrzymanie napięcia zasilającego
sterownik i sondę hydrostatyczną przez okres 3 godzin, w przypadku zaniku
zasilania
sieciowego,
umożliwiając
tym
samym
poinformowanie
stacji
dyspozytorskiej o zaniku napięcia na przepompowni. W przypadku przepompowni
wyposażonej w sondę poziomu stacja dyspozytorska na bieżąco otrzymuje
Rozdzielnica elektryczna
6
informacje o poziomie ścieków w komorze. Pozwala to na bieżące kontrolowanie
sytuacji na uszkodzonej przepompowni;
Anteny dwupasmowej 900/1800 MHz, zewnętrznej do modemu GSM;
Zasilacza stabilizowanego 230V AC ↔ 24V DC/1,25 A do zasilania sterownika,
sondy hydrostatycznej i cewek przekaźników dołączonych do wyjść sterownika.
Zasilacz przystosowany jest do montażu na listwie DIN 35;
Pakiet oprogramowania do sterowania pracą przepompowni ścieków.
System monitorowania i sterowania pracą przepompowni zainstalowany jest na komputerze
oczyszczalni. Do komputera z zainstalowanym oprogramowaniem, podłączany jest specjalny
moduł transmisji danych w trybie on-line z wykorzystaniem technologii GPRS.
Komputer z oprogramowaniem i podłączonym modułem do transmisji danych GPRS tworzy
całość nazywaną w dalszej części „Stacją dyspozytorską”. System monitorowania i
sterowania pracą przepompowni umożliwia monitorowanie podstawowych wielkości, min.:
poziom ścieków, rejestracja i analiza czasu pracy pomp, kontrola pracy sterownika, włamania
do obiektu, zaniku zasilania, stanu zabezpieczeń silnikowych pomp itd.
Do w/w stacji operatorskiej należy wprowadzić nowe dane z modernizowanych obiektów.
Interfejs graficzny powinien być wykonany w standardzie już istniejących obiektów lub
wyższym.
Oprogramowanie sterownika obsługuje przepompownie wyposażone w dwa czujniki
pływakowe (suchobieg, alarm) oraz hydrostatyczną sondę poziomu (sygnał wejściowy sondy
4–20 mA). W tym przypadku poziom MIN, MAX zaprogramowany będzie w sterowniku.
Konfiguracja wartości tych dwóch parametrów odbywać się będzie przy pomocy specjalnego
programu konfiguracyjnego pracującego w środowisku WINDOWS.
Zasada działania systemu:
Sygnały wejściowe oraz wyjściowe sterownika umożliwiają prawidłową realizację
algorytmu sterowania pracą przepompowni (opisanego wcześniej) oraz przesyłanie informacji
o statusie pracy przepompowni do stacji nadrzędnej systemu wizualizacji i zdalnego
sterowania. Sterownik posiada wyjścia binarne typu „otwarty kolektor”. Wyjścia te poprzez
przekaźniki pomocnicze załączają styczniki wykonawcze poszczególnych pomp.
Rozdzielnica elektryczna
7
W przypadku zadziałania zabezpieczenia zwarciowego lub termicznego następuje
wyłączenie pracującej pompy i przejęcie pracy przez pompę sprawną oraz wysłanie do
sterownika odpowiedniego sygnału i uruchomienie zewnętrznej (optyczno – akustycznej)
sygnalizacji alarmowej. Skasowanie alarmu następuje poprzez przycisk.
W celu ochrony pomp przed pracą na suchobiegu zastosować czujnik pływakowy,
zamocowany na ustalonym poziomie, wraz z przekaźnikiem pomocniczym, który przy niskim
poziomie ścieków rozłącza obwody sterowania pomp, gdyż zbyt długa praca pomp „na
sucho” mogłaby doprowadzić do ich uszkodzenia. W przypadku awarii pompy na skutek
zadziałania wyłącznika silnikowego lub zabezpieczenia termicznego wewnątrz pompy,
następuje załączenie sygnalizacji alarmowej. W sytuacji tej do pracy załączana jest pompa
sprawna.
Informacja o zmianie stanu logicznego na dowolnym z 13 wejść sterownika powoduje
przesłanie informacji do systemu wizualizacji. Czas transferu danych nie powinien
przekraczać kilku sekund. (zależne od jakości usługi GPRS operatora)
Do wymiany danych w trybie on-line pomiędzy sterownikami zainstalowanymi w szafkach
sterowniczych, a systemem wizualizacji należy wykorzystać zdarzeniową transmisje
pakietową (GPRS). Takie rozwiązanie gwarantuje optymalizację kosztów eksploatacji
systemu.
Funkcją dodatkową jest możliwość zdalnego sterowania pracą przepompowni z poziomu
oprogramowania do wizualizacji.
Uprawniony operator ma możliwość zdalnego:
załączenia pompy lub pomp oraz załączania i kasowania alarmu,
przeprogramowania poziomów załączania i wyłączania pompy
Sygnały wejściowe sterownika – wielkości monitorowane i sterowane:
analogowe (4 – 20 mA):
AN1 – poziom ścieków z sondy hydrostatycznej lub ultradźwiękowej,
AN2 – prąd pompy (opcja).
cyfrowe (dwustanowe):
1. suchobieg,
2. poziom MIN, (opcja)
3. poziom MAX, (opcja)
4. poziom ALARM,
Rozdzielnica elektryczna
5. termik pompy P1,
6. termik pompy P2,
7. 3 fazy + kolejność, (opcja)
8. włamanie do obiektu,
9. praca Auto/Ręka dla pompy P1,
10. praca Auto/Ręka dla pompy P2,
11. załączona pompa P1,
12. załączona pompa P2,
13. kasowanie alarmu.
Sygnały wyjściowe sterownika:
- cyfrowe (dwustanowe) maksymalnie 24V / 0,2A na wyjście:
1. załącz P1 (sterowanie cewką przekaźnika 24V DC),
2. załącz P2 (sterowanie cewką przekaźnika 24V DC),
3. załącz alarm (sterowanie cewką przekaźnika 24V DC).
Szafka telemetryczna winna być gotowa do pracy przy temperaturach poniżej 0C.
8