2016-12-10
Mikroprocesorowe układy
sterowania
Sterowniki Programowalne
PLC
Semestr zimowy 2016/2017, WIEiK-PK
1
Mikroprocesorowe układy sterowania w
automatyce przemysłowej
•
•
•
•
•
•
•
•
•
•
•
•
•
Czujniki (przetworniki sygnałów) dwustanowe i analogowe
Układy czasowe (wyłączniki czasowe, przekaźniki czasowe)
Układy licznikowe (liczniki programowalne, zegary RTC)
Układy regulacji automatycznej (regulatory dwustanowe, regulatory
trójstanowe, regulatory ciągłe PID, regulatory ciągłe PID +Fuzzy Logic)
Przekaźniki programowalne
Sterowniki programowalne PLC (z ang. Programmable Logic Controller)
Programowalne Sterowniki Automatyki PAC (z ang. Programmable
Automation Controller)
Operator Panel & Programmable Logic Controller - OPLC – Sterownik
programowalny wyposażony w panel operatorski
Układy napędowe wraz sterownikiem PLC (Drive PLC)
Sterowniki numeryczne CNC (z ang. Computerized Numerical Control ,
komputerowe sterowanie numeryczne)
Komputery przemysłowe IPC (z ang. Industrial PC)
Dedykowane systemy sterowania, systemy wbudowane (z ang. embedded
system)
Panele operatorskie
Semestr zimowy 2016/2017, WIEiK-PK
2
1
2016-12-10
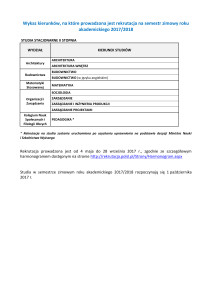
Przykłady urządzeń mikroprocesorowych z automatyki
przemysłowej
Regulatory histerezowe- dwustanowe, ciągłe PID, regulatory temperatury
Semestr zimowy 2016/2017, WIEiK-PK
3
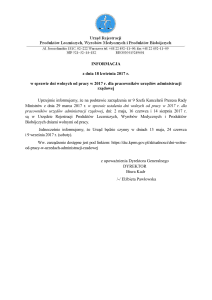
Przykłady urządzeń mikroprocesorowych z automatyki
przemysłowej
Licznik impulsów
Semestr zimowy 2016/2017, WIEiK-PK
4
2
2016-12-10
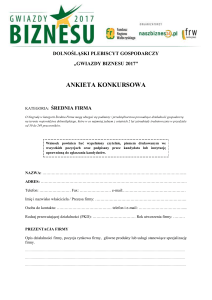
Przykłady urządzeń mikroprocesorowych z automatyki
przemysłowej - przekaźniki czasowe
Semestr zimowy 2016/2017, WIEiK-PK
5
Przekaźnik programowalny
Podstawowe cechy:
• Wejścia logiczne
• Wyjścia logiczne
• Wejścia analogowe
• Wyjścia analogowe
• Interfejs komunikacyjny
• Interfejs użytkownika (ekran + klawiatura)
Realizowane funkcje:
• Funkcje logiczne
• Układy czasowe
• Układy licznikowe
• Proste funkcje regulacji
• Proste operacje matematyczne
• Komunikacja z urządzeniami zewnętrznymi
Semestr zimowy 2016/2017, WIEiK-PK
6
3
2016-12-10
Przekaźnik programowalny
Semestr zimowy 2016/2017, WIEiK-PK
7
Sterownik PLC
Podstawowe cechy:
• Wejścia logiczne
• Wyjścia logiczne
• Wejścia analogowe
• Wyjścia analogowe
• Wejścia/wyjścia specjalizowane
• Interfejsy komunikacyjne
Realizowane funkcje:
• Rozbudowane funkcje logiczne
• Rozbudowane i duża liczba układów czasowych
• Rozbudowane i duża liczba układów licznikowych
• Rozbudowane funkcje regulacji
• Zaawansowane operacje matematyczne
Semestr zimowy 2016/2017,
WIEiK-PK z urządzeniami zewnętrznymi 8
• Komunikacja
4
2016-12-10
Historia PLC
•
•
•
•
•
•
•
•
•
Sterowniki PLC opracowane zostały na potrzeby amerykańskiego przemysłu samochodowego, gdzie
zastąpić miały układy przekaźnikowe i elementy mechaniczne używane w systemach sterowania.
W 1968 roku GM Hydramatic (dział biznesowy General Motors zajmujący się automatyką) złożył ofertę na
propozycję wymiany stosowanych systemów elektrycznych na urządzenia elektroniczne. Konkurs wygrała
firma Bedford Associates z Massachusetts.
Pierwszym powstałym PLC było urządzenie pierwotnie nazywane "084", gdyż był to osiemdziesiąty
czwarty projekt tej firmy.
W latach 70. zeszłego wieku powstały również pierwsze kompaktowe sterowniki programowalne.
Za protoplastów tych urządzeń uznaje się PLC z serii PM firmy Mitsubishi Electric. Wykorzystywane one
były jedynie przez Mitsubishi w aplikacjach związanych z przemysłem samochodowym.
W 1981 roku firma Mitsubishi Electric wprowadziła na rynek serię sterowników Melsec F, które były
jednymi z pierwszych kompaktowych PLC sprzedawanych w Europie.
O sukcesie sterowników w znaczącym stopniu zadecydowało wprowadzenie do budowy PLC w roku 1977
przez firmę Allen-Bradley ośmiobitowego mikroprocesora Intel 8080.
Dzisiaj urządzenia PLC w zasadzie wyparły przekaźnikowe układy sterowania logicznego. Podstawową
zaletą nowego rozwiązania jest łatwość i szybkość dostosowywania sterowników do różnych zadań przez
wymianę oprogramowania, a nie, jak to było wcześniej, przez przygotowanie odpowiedniej dokumentacji
elektrycznej i okablowania szaf sterowniczych.
W latach dziewięćdziesiątych zaczęto powszechnie wykorzystywać komputery PC do programowania
sterowników. Napisanie programu czy też wprowadzenie do niego poprawek lub zmian stało się jeszcze
prostsze.
Semestr zimowy 2016/2017, WIEiK-PK
9
Sterownik PAC - Programmable
Automation Controller
PAC – połączenie sterownika PLC i komputera PC
Semestr zimowy 2016/2017, WIEiK-PK
10
5
2016-12-10
Sterownik PAC
Semestr zimowy 2016/2017, WIEiK-PK
11
Przykład zastosowania PLC – szafa sterownicza
http://psams.pl/dzial-budowy-maszyn/prefabrykacja-szaf-sterowniczych/
Semestr zimowy 2016/2017, WIEiK-PK
12
6
2016-12-10
STEROWNIKI PROGRAMOWALNE
•
•
STEROWNIKI PROGRAMOWALNE PLC (Programmable Logic Controllers) są
komputerami przemysłowymi, które pracują pod kontrolą systemu
operacyjnego czasu rzeczywistego.
Do głównych zadań realizowanych przez sterowniki PLC należy:
– zbieranie sygnałów pomiarowych za pośrednictwem modułów wejściowych z
analogowych i dyskretnych czujników oraz urządzeń pomiarowych,
– wykonywanie zadanych programów (algorytmu działania) na podstawie
przyjętych parametrów i uzyskanych danych o sterowanym procesie lub
maszynie,
– generowanie sygnałów sterujących zgodnie z wynikami obliczeń programu i
przekazywanie ich poprzez moduły wyjściowe do elementów i urządzeń
wykonawczych,
– transmitowanie danych za pomocą modułów i łącz komunikacyjnych,
– realizowanie funkcji diagnostyki programowej i sprzętowej
•
Wartości sygnałów pomiarowych zmiennych procesowych są wejściami
sterownika, zaś obliczone zmienne sterujące, stanowią wyjścia sterownika.
Semestr zimowy 2016/2017, WIEiK-PK
13
Podział sterowników PLC
• Podział ze względu na budowę:
– Sterowniki kompaktowe – brak możliwości rozbudowy,
ustalona liczba wejść/wyjść
– Sterowniki modułowe – możliwości rozbudowy, liczby
wejść/wyjść zależna od użytkownika
– Sterowniki rozproszone (sprawdzić)
• Podział ze względu na ilość wejść/wyjść:
–
–
–
–
–
Małe sterowniki (nano sterowniki) do 32 wejść/wyjść
Małe sterowniki (micro) do 128 wejść/wyjść
Małe sterowniki o budowie modułowej do 256 wejść/wyjść
Średnie sterowniki od 128 do 1024 wejść/wyjść
Duże sterowniki powyżej 1024 wejść/wyjść
Semestr zimowy 2016/2017, WIEiK-PK
14
7
2016-12-10
Budowa sterownika PLC
Zasilanie sterownika
Izolacja galwaniczna
obwodów sterownika
Elementy sygnalizacyjne
Wejścia logiczne
(dwustanowe)
System
mikroprocesorowy:
• pamięć ROM- Flash
•pamięć RAM – SRAM
•pamięć RAM – EEPROM
•układy wejścia/wyjścia
•interfejs szeregowy
Wejścia
analogowe
(napięciowe,
prądowe)
Wejścia
komunikacyjne
Wyjścia logiczne
(dwustanowe)
Wyjścia
analogowe
(napięciowe,
prądowe)
Wyjścia
komunikacyjne
Elementy stykowe
Schemat blokowy sterownika PLC
Semestr zimowy 2016/2017, WIEiK-PK
15
Elementy składowe PLC
Sterownik PLC składa się z:
•
jednostki centralnej (CPU - 8, 16 lub 32-bitowe) wraz pamięciami (RAM, ROM ,
EEPROM). (Rozbudowane PLC mogą mieć kilka CPU)
•
•
•
•
•
•
bloków wejść cyfrowych
bloków wejść analogowych
bloków komunikacyjnych
bloków wyjść cyfrowych
bloków wyjść analogowych
bloków specjalnych
–
–
–
–
•
•
•
•
moduł licznika impulsów
moduł pozycjonowania osi
moduły sterowania silnikami
Zegar RTC
układu zasilacza
modułów komunikacyjnych (np. RS232; RS485, CAN, sieć Ethernet)
elementów sygnalizacyjnych (diody LED, wyś. LCD)
prostych elementów stykowych i regulacyjnych, (prosta klawiatura,
potencjometr nastawny, przełączniki kodowe)
Semestr zimowy 2016/2017, WIEiK-PK
16
8
2016-12-10
Budowa sterownika PLC
Podstawowe parametry wejść/wyjść w PLC
•
Wejścia logiczne
Stałoprądowe 12Vdc, 24Vdc, logika dodatnia - Stan „0” logiczne od -30V do +5V, Stan „1” logiczne od +15V do +30V
•
Zmiennoprądowe 110Vac, 230Vac, Stan „0” logiczne od 0Vac do 40Vac, Stan „1” logiczne od 80Vac do 250Vac
•
Wejścia analogowe
–
–
–
napięciowe 0-5V, 0-10V, +/-5V, +/-10V
prądowe 0-20mA, 4-20mA, +/-20mA
Wejścia dla czujników temperatur
•
•
–
•
Rezystancyjne (RTD) - Pt100, Pt1000, Ni100)
Termopara – typu J, K, B, N, T
Wejścia dla czujników mostkowych (np. tensometrycznych)
Wyjścia logiczne
–
–
–
Stałoprądowe DC 12Vdc, 24Vdc,
Zmiennoprądowe AC 110Vac, 230Vac
Stało lub zmiennoprądowe DC lub AC (wyjścia przekaźnikowe)
– Wyjścia analogowe
–
–
•
•
•
•
napięciowe 0-5V, 0-10V, +/-5V, +/-10V
prądowe 0-20mA, 4-20mA, +/-20mA
Interfejs komunikacyjny - szeregowy – RS232, RS422, RS485, CAN, Ethernet, ....
Elementy do wprowadzania danych – pojedyncze przyciski, klawiatura, potencjometr
Elementy do wizualizacji działania – diody LED, wyświetlacze LCD (alfanumeryczne,
graficzne)
Zasilanie sterowników PLC
–
–
stałoprądowe 24Vdc, 48Vdc,
zmiennoprądowe 24Vac, 110Vac, 230Vac, (50Hz lub 60Hz)
Semestr zimowy 2016/2017, WIEiK-PK
17
Główni producenci sterowników PLC, PAC
Sterowniki PLC, PAC:
• Siemens
• ABB
• Allen Bradley
• B&R
• Bosch Rexroth
• General Electric
• Fanuc
• Fatek
• Fuji
• Mitsubishi Electric
• National Instruments
• Omron
• Panasonic
• Phoenix Contact
• Pro-face
• Schneider Electric
• Saia Burgess
• Toshiba
• VIPA
Przewidywania rynku PLC, PAC na świecie
(http://www.arcweb.com/study-brochures/study-PLC-ww.pdf)
Semestr zimowy 2016/2017, WIEiK-PK
18
9
2016-12-10
Wejście logiczne pojedyncze
Izolacja
galwaniczna na
optoizolatorach
Wejścia logiczne typu DC 24V
lub AC 230V
Io
Układ
czujnika
Uwe
Obwód
wejściowy
CPU
Klucz
Źródło zasilania obwodu
wejściowego
Sterownik
uziemienie
Przykład wejścia typu DC
Semestr zimowy 2016/2017, WIEiK-PK
19
Wejście logiczne wielokrotne
Izolacja
galwaniczna
Wejścia logiczne, prąd
wpływający
Io
X0
czujnik
X1
czujnik
Obwód
wejściowy
CPU
X2
czujnik
COM
Źródło zasilania
obwodu
wejściowego
Semestr zimowy 2016/2017, WIEiK-PK
Sterownik
20
10
2016-12-10
Wejścia analogowe napięciowe
Możliwa izolacja
galwaniczna
Zakresy +5V, +10V, +/-10V
Uwy
czujnika
Iwe
Uwe
Rwe
ADC
W
CPU
Ochrona
wejścia
AGND
AGND
Obwód pomiarowy z wejściem pojedynczym
Uwy
czujnika
Iwe
+Uwe
Rwe
+
Wr
Ochrona
wejścia
Iwe
-Uwe
ADC
CPU
-
AGND
Obwód pomiarowy z wejściem różnicowym
AGND
Semestr zimowy 2016/2017, WIEiK-PK
21
Wejście napięciowe pojedyncze
Sygnał napięciowy z
czujnika
Wewnętrzny system pomiarowy
zakłócenia
Filtr DP
RKABLA
Iwe
UWY
W
UWE
RKABLA1
AGND1
∆UGND
RWE
UX
R1
C
A/C
MCU
R2
VREF
AGND
DGND
DGND
AGND
Obwód pomiarowy z wejściem pojedynczym
Dzielnik wejściowy, filtr DP, wzmacniacz
pojedynczy, przetwornik A/C i mikrokontroler
Zalety i wady wejścia pojedynczego:
• mała liczba przewodów,
• małe koszty przy krótkich odległościach,
• małe koszty i prostota układu pomiarowego,
• słaba odporność na zakłócenia,
• słabe tłumienie sygnałów tzw. wspólnych
Semestr zimowy 2016/2017, WIEiK-PK
22
11
2016-12-10
Wejście napięciowe różnicowe
Sygnał napięciowy z
czujnika
zakłócenia
RKABLA
Wewnętrzny system pomiarowy
Iwe
Rwe
C
R2
∆Ux
∆Uwe
Uwy
RKABLA
RKABLA1
AGND1
R1
Iwe
UW1 UW2
Filtr DP
R1
Ux
WR
K
A/C
-
R2
MCU
VREF
C
DGND
UW+ UW-
DGND
AGND
∆UGND
Obwód pomiarowy z wejściem różnicowym
+
Dzielnik wejściowy, filtr DP, wzmacniacz różnicowy,
przetwornik A/C i mikrokontroler
Zalety i wady wejścia pojedynczego:
• dobra odporność na zakłócenia,
• silne tłumienie sygnałów tzw. wspólnych
• większa liczba przewodów,
• większe koszty przy dużych odległościach,
• większe koszty i bardziej skomplikowany
układ pomiarowy,
Semestr zimowy 2016/2017, WIEiK-PK
Wejściowe Napięcie Różnicowe
∆Uwe= UW1 - UW2
Wejściowe Napięcie dla przet. A/C
UX= K*(UW1 - UW2)
23
Transmisja prądowa sygnałów
• Zalety i wady przesyłania sygnałów w postaci prądowej:
– większa odporność na zakłócenia,
– eliminacja wpływu rezystancji połączeń (kabla),
– możliwość zasilania czujnika i przesyłania sygnału tymi samymi
przewodami,
– wymagana zamiana sygnału na postać prądową, konwerter
napięcie/prąd,
– wymagany rezystor pomiarowy do zamiany prądu na napięcie
• Sygnały analogowe i logiczne mogą być przesyłane za
pomocą wymuszania prądu w obwodzie, tzw. pętla
prądowa.
• Można przesyłać łącznie sygnał analogowy i logiczny, np. tak
jest w standardzie HART (4-20mA), do szeregowej transmisji
danych.
Semestr zimowy 2016/2017, WIEiK-PK
24
12
2016-12-10
Wielokanałowy pomiar napięcia
AIN0
UX
V0
AIN1
W
UX
A/C
MCU
V1
AIN2
V2
COM
Multiplekser
analogowy
Wybór kanału
AGND
DGND
Semestr zimowy 2016/2017, WIEiK-PK
25
Wejścia analogowe prądowe
Zakresy 0-20mA, 4-20mA, +/-20mA
Przetwornik
pomiarowy
Iwe 4-20mA
Rp
W
Izolacja
galwaniczna
ADC
CPU
ADC
CPU
Uwe
Napięcie zasilania
przetwornika ok. 12-30Vdc
AGND
AGND
Obwód pomiarowy dwuprzewodowy z wejściem 4-20mA
Uz
Napięcie zasilania
przetwornika ok. 12-30Vdc
Rp
Iwe 0-20mA
W
Uwe
AGND
AGND
Przetwornik
pomiarowy
Obwód pomiarowy trójprzewodowy z wejściem 0-20mA
Semestr zimowy 2016/2017, WIEiK-PK
26
13
2016-12-10
Rodzaje wyjść prądowych
Możliwa izolacja
galwaniczna
Napięcie zasilające konwerter U/I, 24Vdc
VZAS
IWY
MCU
C/A
UWY
RODBMAX
RKABLA
Konwerter
U/I
RODB
UWY
DGND
RKABLA
AGND
Obwód wyjściowy prądowy 0-20mA lub 4-20mA (tzw. pętla prądowa), prąd wypływający,
(ang. source current), jeden koniec odbiornika podłączony do masy
IWY
MCU
C/A
UWY
Konwerter
U/I
VZAS
DGND
AGND
RODBMAX
RKABLA
UWY
24Vdc
RODB
RKABLA
Obwód wyjściowy prądowy 0-20mA lub 4-20mA, prąd wpływający (ang. sink current),
jeden koniec odbiornika podłączony do plus zasilania
Semestr zimowy 2016/2017, WIEiK-PK
27
Budowa wyjścia napięciowego
Izolacja sygnałów
cyfrowych
Izolacja sygnałów
analogowych
Obwód wyjściowy napięciowy
Wewnętrzny obwód wyjściowy
zakłócenia
Filtr DP
C/A
DGND
RKABLA
RODB MIN
R1
MCU
VREF
Iwy
W
AGND
C
UWY
Mikrokontroler, przetwornik C/A,
wzmacniacz , filtr DP
Zalety i wady wyjścia napięciowego:
• małe koszty przy krótkich odległościach,
• małe koszty i prostota układu wyjściowego,
• słaba odporność na zakłócenia,
• wpływ rezystancji kabla
UODB
AGND
RODB
RKABLA
Zalety i wady izolacji galwanicznej
• bardzo dobra odporność na zakłócenia,
• Możliwość doprowadzenia sygnałów
analogowych na różne potencjały,
• większa liczba elementów, zmniejszona
dokładność wyjściowa,
• większe koszty układu wyjściowego i bardziej
skomplikowany układ wyjściowy,
• dodatkowe źródła zasilania
Semestr zimowy 2016/2017, WIEiK-PK
28
14
2016-12-10
Wyjście logiczne pojedyncze
Izolacja
galwaniczna
Obciążenie
Sterownik
Źródło
zasilania
Io
Układ
sterowania
Uk
Uo
Klucz
uziemienie
• Obciążenie może mieć charakter typu R, RL, RLE, RC
• Źródło zasilania może być typu DC, AC, DC+AC
• W zależności od realizacji klucza, prąd w obwodzie może
płynąć tylko w jednym kierunku (DC) lub w obu (AC)
Semestr zimowy 2016/2017, WIEiK-PK
29
Wyjścia logiczne –
prąd wpływający, obciążenie nieuziemione
Sterownik
X0
X1
Układ
sterowania
X2
R01
R04
R03
Io1
Io2
Io3
Vp
COM
Semestr zimowy 2016/2017, WIEiK-PK
30
15
2016-12-10
Wyjścia logiczne –
prąd wypływający, obciążenie uziemione
Odbiornik typu R, RL, RC, RLE,
(zasilane DC, AC, DC+AC)
COM
Sterownik
R01
X0
Io1
Vp
R02
X1
Io2
Układ
sterowania
R03
X2
Io3
Semestr zimowy 2016/2017, WIEiK-PK
31
Wyjścia logiczne w PLC
• Stałoprądowe (DC) tranzystorowe (do ok. 60V, ok. 1A)
– Tranzystorowe , NPN, NO (normalnie otwarty),
– Tranzystorowe , typu PNP, NO (normalnie otwarty),
– Przekaźnik półprzewodnikowy mocy typu DC na tranzystorach MOSFET lub
IGBT
• Zalety: małe gabaryty, duża częstotliwość przełączania, mała moc pobierana na
przełączenie
• Wady: mała odporność na zwarcia, przeciążenia i przepięcia
• Zmiennoprądowe (AC) (do ok. 250Vac, ok. 5A)
– Przekaźnik elektromagnetyczny – wyjście typu AC, DC, DC+AC
• Zalety: większa odporność na zwarcia, przeciążenia i przepięcia, mały
spadek napięcia na stykach
• Wady: ograniczone parametry dla zasilania DC, niska częstotliwość
przełączania, większe gabaryty, występowanie drgań zestyków
– Przekaźnik półprzewodnikowy (SSR – Solid State Relay) –
wyjście tylko AC (triak, tyrystor)
• Zalety: brak drgań zestyków, możliwość włączenia w zerze
• Wady: tylko jedna para styków, spadek napięcia na kluczu – radiator,
Semestr zimowy 2016/2017, WIEiK-PK
32
16
2016-12-10
Programowanie sterowników PLC
W związku z coraz powszechniejszym stosowaniem sterowników PLC pojawiła
się konieczność ich standaryzacji i dlatego została opracowana i wydana w
1992 roku przez Międzynarodową Komisję Elektroniki (International
Electronical Commission IEC) norma IEC 1131 "Programmable Controllers".
Norma międzynarodowa IEC 1131 dotyczy sterowników programowalnych i
związanych z nimi urządzeń peryferyjnych takich jak:
• narzędzia do programowania i uruchamiania,
• wyposażenie testujące,
• interfejsy człowiek-maszyna (MMI).
• Norma obejmuje:
• informacje ogólne (General Informations),
• standardy, wymagania i badania dotyczące sprzętu (Equipment and Test
Requirements),
• języki programowania (Programming Languages),
• wytyczne dla użytkownika (User Guidelines),
• specyfikacja usług komunikowania-standardy w zakresie wymiany
informacji (Messaging Services).
Semestr zimowy 2016/2017, WIEiK-PK
33
Programowanie sterowników PLC
Języki programowania sterowników (Norma IEC 1131-3 )
• Języki tekstowe:
– Język listy instrukcji IL (Instruction List)
– Język strukturalny ST (Structured Text)
•
Języki graficzne:
•
•
•
•
•
Język schematów drabinkowych LD (Ladder Diagram)
Język schematów bloków funkcyjnych FBD (Function Block Diagram)
Sekwencyjny język graficzny SFC (Sequential Function Chart)
CFC-Graficzny edytor schematów funkcji
Klasyczne języki programowania (jeżeli producent PLC to dopuszcza) –
język C, C++, asembler
Graf sekwencji SFC (Sequential Function Chart) - sposób tworzenia struktury
wewnętrznej programu za pomocą grafów zawierających etapy (kroki) i
warunki przejścia między tymi etapami. Graf taki może być wykorzystany w
jednym z wymienionych wyżej języków w celu otrzymania odpowiedniej
struktury programu użytkownika.
Semestr zimowy 2016/2017, WIEiK-PK
34
17
2016-12-10
Programowanie sterowników PLC
Język drabinkowy LD
Język Instrukcji IL
Język graficzny SFC
Język strukturalny ST
Język graficzny blokowy FBD
Semestr zimowy 2016/2017, WIEiK-PK
35
Język graficzny blokowy FBD
Semestr zimowy 2016/2017, WIEiK-PK
36
18
2016-12-10
Język drabinkowy LD
•
•
•
•
•
Jest to język graficzny używający standaryzowanych symboli graficznych. Symbole
umieszcza się w obwodach w sposób podobny do szczebli w schematach
drabinkowych dla przekaźnikowych układów sterowania.
Obwód LD (Ladder Diagram) jest po obydwu stronach ograniczony przez szyny
prądowe. Szyny te nie są elementami obwodu. Prawa szyna może być rysowana w
sposób jawny lub pozostawać w domyśle.
W języku LD mogą występować standardowe funkcje i bloki funkcyjne.
Język LD pozwala budować zależności logiczne z wykorzystaniem graficznej
reprezentacji wyrażeń boolowskich złożonych ze styków i cewek (elementów 1bitowych).
Podstawowymi elementami języka LD są:
–
–
–
–
–
styki statyczne: styk zwierny i styk rozwierny,
styki impulsowe: styk reagujący na zbocze narastające i styk reagujący na zbocze,
cewka zwykła i cewka negująca,
cewki z zatrzaskiem: cewka ustawiająca i cewka kasująca,
cewki z zapamiętaniem stanu, cewka ustawiająca z zapamiętaniem stanu i cewka kasująca z
zapamiętaniem stanu,
– cewki impulsowe: cewka reagująca na zbocze narastające i cewka reagująca na zbocze
opadające.
Semestr zimowy 2016/2017, WIEiK-PK
37
Elementy języka drabinkowego
Oznaczenia i symbole stosowane przy tworzeniu programów na sterowniki
PLC w języku drabinkowym – styki wyjściowe
Symbol
Rodzaj
Opis
--( )--
Boolean
(bit)
Stan występujący po lewej stronie jest kopiowany do przypisanej zmiennej i na prawą stronę
--( / )--
Boolean
Stan występujący po lewej stronie jest kopiowany do przypisanej zmiennej w taki sposób ,że
dla stanu "ON" z lewej strony do zmiennej przepisywany jest stan "OFF" i na odwrót
(Negacja).
--( P )--
Boolean
Do zmiennej jest przepisywany "ON" tylko na jeden cykl programu po zmianie stanu z lewej
strony z "OFF" na "ON" tzw. zbocze narastające
--( N )--
Boolean
Do zmiennej jest przepisywany "ON" tylko na jeden cykl programu po zmianie stanu z lewej
strony z "ON" na "OF" tzw. zbocze opadające
--( S )--
Boolean
Stan występujący po lewej stronie jest kopiowany "zatrzaskowo„ do przypisanej zmiennej.
Powrót zmiennej do stanu "OFF" możliwy jest tylko przy użyciu cewki RESET
--( R )--
Boolean
W przypadku wystąpienia stanu "ON" po lewej stronie zmienna jest resetowana do stanu
"OFF"
Semestr zimowy 2016/2017, WIEiK-PK
38
19
2016-12-10
Elementy języka drabinkowego
Oznaczenia i symbole stosowane przy tworzeniu programów na
sterowniki PLC w języku drabinkowym – styki wejściowe
Symbol
Rodzaj
Opis
|-----
Symbol ten oznacza początek linii , występuje zawsze skrajnie po lewej stronie i jego stan jest równy 1
"TRUE" - lewa strona drabinki
------|
Symbol ten oznacza koniec linii , występuje zawsze skrajnie po prawej stronie - prawa strona drabinki.
--| |--
Boolean
(bit)
Stan występujący po lewej stronie jest przenoszony na prawą stronę w momencie występowania w
przypisanej zmiennej stanu "1 - TRUE" . W każdym innym przypadku stan z prawej strony równy jest "0 –
FALSE„
--|/|--
Boolean
Stan występujący po lewej stronie jest przenoszony na prawą stronę w momencie występowania w
przypisanej zmiennej stanu "0 - FALSE". W każdym innym przypadku stan z prawej strony równy jest "0 FALSE„
--|P|--
Boolean
Stan występujący po lewej stronie jest przenoszony na prawą stronę na jeden cykl programu w momencie
przejścia zmiennej ze stanu "0 - FALSE" na "1 - TRUE". W każdym innym przypadku stan z prawej strony
równy jest "0 - FALSE„. Jest to tzw. zbocze narastające ( z ang. positive transition ) . W praktyce działanie
wygląda w ten sposób , że w momencie pojawienia się sygnału "1" w przypisanej zmiennej sygnał z lewej
strony symbolu jest przenoszony tylko w tym samym cyklu wykonywania programu , w cyklu kolejnym nie
ma znaczenia utrzymywanie się sygnału "1" w przypisanej zmiennej - sygnał nie będzie przenoszony.
--|N|--
Boolean
Stan występujący po lewej stronie jest przenoszony na prawą stronę na jeden cykl programu w momencie
przejścia zmiennej ze stanu "1 - TRUE" na "0 - FALSE". W każdym innym przypadku stan z prawej strony
równy jest "0 - FALSE„. Jest to tzw. zbocze opadające ( z ang. negative transition ) . W praktyce działanie
wygląda w ten sposób , że w momencie pojawienia się sygnału "1" w przypisanej zmiennej sygnał nie jest
przenoszony dalej . Sygnał z lewej zostanie przeniesiny dopiero kiedy stan zmiennej zmieni się na "0" i to
tylko w tym samym cyklu wykonywania programu.
Semestr zimowy 2016/2017, WIEiK-PK
39
Elementy języka drabinkowego
Oznaczenia i symbole stosowane przy tworzeniu programów na sterowniki PLC w
języku drabinkowym
Symbol
Rodzaj
I,
X
Input
Wejście
Opis
W każdym sterowniku PLC mają takie samo oznaczenie , mogą być
przypisywane tylko do symboli styków informują o stanie wejść na
sterowniku
O,
Y
Output
Wyjście
W każdym sterowniku PLC mają takie samo oznaczenie , mogą być
przypisywane zarówno do symboli cewek (wtedy ustawiają
konkretne wyjście sterownika) jak i styków gdzie informują o stanie
wyjść .
M
Marker
Znacznik
Tym symbolem określa się zmienne wewnętrzne sterownika ,
wykorzystywane są jako cewki i styki, elementy pośrednie
programu .
UWAGA !!!
Symbole literowe stosowane przy tworzeniu programów w języku drabinkowym mogą być inne w zależności od firmy, która
wyprodukowała sterownik PLC i oprogramowanie.
Semestr zimowy 2016/2017, WIEiK-PK
40
20
2016-12-10
Elementy języka drabinkowego - przykłady
Funkcja NOT
230V/50Hz
Funkcja AND
Styki czujników
wejściowych
Odbiorniki
I0.0
Funkcja NAND
+24V
I0.1
Q0.0
Ro1
Q0.1
Ro2
MCU
Funkcja OR
COM1
COM2
+24V
Funkcja NOR
Interfejs komunikacyjny
Funkcja XOR
Semestr zimowy 2016/2017, WIEiK-PK
41
Elementy języka instrukcji IL
Lista Instrukcji – (Instruction List) jest to język w formule zbliżony do
asemblera, opisany w taki sposób aby był zrozumiały dla większości
automatyków nie mających do tej pory styczności ze sterownikami PLC
ani z programowaniem w asemblerze. Przeważnie każdemu
elementowi w języku drabinkowym odpowiada jakaś funkcja w języku
instrukcji. Prawie każde oprogramowanie w języku drabinkowym
można przekonwertować do postaci języka instrukcji.
Najpopularniejsze języki programowania PLC według
raportu z 2009, Automatyka B2B
Semestr zimowy 2016/2017, WIEiK-PK
42
21
2016-12-10
Elementy języka instrukcji IL
Symbol
Rodzaj
Opis
LD
Bool, word ,
integer
"Załaduj„ Załadowanie wartości zmiennej do aktywnego rejestru (z informatyki
odpowiednikiem byłoby ładowanie na stos) .Zmienna występująca zwykle po
prawej od wyrażenia może być właściwie dowolnego typu , uzależnione to jest
od operatora , który wystąpi po niej.
ST
Bool, word ,
integer
"Ustaw„ Zapamiętanie (przepisanie) wartości z aktywnego rejestru do zmiennej.
S
Bool
"Ustaw" Zapamiętanie tzw. zatrzaskowe wartości zmiennej "1", zmiana stanu
możliwa jest tylko przez funkcję Kasuj
R
Bool
"Kasuj" stan zmiennej jest resetowany do "0"
AND
Bool
Operator logiczny "I"
OR
Bool
Operator logiczny "LUB"
ADD,
SUB,
MUL
DIV
Bool, word,
integer
Dodawanie, odejmowanie, mnożenie , dzielenie
GT, GE,
EQ, NE,
LE,LT
Bool, word,
integer
Większe niż : ">„ , Większe lub równe : " ≥ „ , Równe : " = " , Nie równe : " ≠ " ,
Mniejsze lub równe : " ≤ " , Mniejsze : " < „
Semestr zimowy 2016/2017, WIEiK-PK
43
Język FBD
•
•
•
•
•
FBD jest językiem graficznym, który pozwala budować rozbudowane
aplikacje wykorzystując gotowe bloki funkcyjne lub procedury znajdujące
się w bibliotece.
Pisanie aplikacji w tym języku polega na wyborze odpowiedniego bloku
funkcyjnego i umieszczeniu na ekranie edytora graficznego.
Funkcje te w programie są widziane jako prostokąty realizujące zależności
pomiędzy zmiennymi wejściowymi a zmiennymi wyjściowymi.
Wejścia i wyjścia funkcji, łączone między sobą tworzą strukturę programu.
Bloki funkcyjne mogą być podzielone na następujące grupy:
–
–
–
–
–
–
–
–
–
bloki funkcyjne umożliwiające tworzenie struktury programu,
funkcje Boolowskie,
funkcje arytmetyczne,
funkcje logiczne,
funkcje porównania,
funkcje manipulacji na bitach,
funkcje zegara, funkcje licznika,
funkcje przetwarzania sygnałów ciągłych, funkcje generowania sygnału,
funkcje matematyczne, funkcje trygonometryczne, funkcje manipulacji na
bitach,
– funkcje konwersji, funkcje operacji na stringach, funkcje operacji na tablicach.
Semestr zimowy 2016/2017, WIEiK-PK
44
22
2016-12-10
Najpopularniejsze języki programowania PLC – opinia
krajowych dostawców sterowników programowalnych
Semestr zimowy 2016/2017, WIEiK-PK
45
SEKWENCYJNY JĘZYK GRAFICZNY (SFC)
•
Język ten jest podstawowym językiem zdefiniowanym w normie IEC 1131-3. Opisuje on operacje,
wykorzystując prostą reprezentację graficzną dla poszczególnych kroków procesu i warunków
nazywanych tranzycjami. Wyrósł on na gruncie metod opisu automatów sekwencyjnych, do których
zalicza się :
–
–
–
•
•
•
•
metodę polegającą na użyciu grafu przejść (każdy węzeł grafu jest związany ze stanem automatu, natomiast
łuk grafu jest określony przez zmienną logiczną lub funkcję kilku zmiennych)
metodę tablicy stanów (liczba kolumn rośnie wykładniczo ze wzrostem liczby wejść np. dla 20 wejść w tablicy
stanów potrzeba więcej niż milion kolumn)
ściśle związaną z fizyczną realizacją metodę schematów drabinkowych opierającą się na analogii do
schematów przekaźnikowych.
Wzrost złożoności systemów sterowania sekwencyjnego doprowadził do zdefiniowania w roku 1977
metody Grafcet. Wykorzystuje ona formalizm sieci Petriego typu P/T (Pozycja/Tranzycja)
zmodyfikowany dla procesów dyskretnych.
Zaletą jej jest zapis funkcji sekwencyjnych w sposób niezależny od realizacji sprzętowej
i programowej. Na założeniach metody Grafcet w normie IEC 1131-3 zdefiniowano sposób opisu
działania sterownika w postaci sekwencji SFC (Sequential Function Chart).
Proces cykliczny jest podzielony na kolejne kroki oddzielone warunkami logicznymi. Formalizm ten
może być wykorzystany przy programowaniu sterownika w celu stworzenia odpowiedniej struktury
wewnętrznej programu.
Zwykle do opisu poszczególnych akcji związanych z krokami i warunkami wykorzystuje się inne
języki. Język ten umożliwia równoległe przejście pomiędzy dwoma krokami lub tranzycjami, co
oznacza , że istnieje w nim możliwość równoległego przetwarzania części programu.
Semestr zimowy 2016/2017, WIEiK-PK
46
23
2016-12-10
Wybór języka programowania PLC
Wybór właściwego języka
Mając do dyspozycji kilka różnych języków programowania, przed wyborem konkretnego z nich
należałoby odpowiedzieć sobie na kilka kluczowych pytań. Oczywiście naturalną tendencją jest
pozostawanie przy tym języku, który znamy. Jednak zawsze warto wziąć pod uwagę umieszczoną
poniżej listę cech innych języków:
–
–
–
–
–
–
–
–
–
•
•
•
•
łatwość nadzoru przez użytkownika końcowego: SFC,
powszechność i akceptacja języka: LD,
znajomość i akceptacja w Europie: IL lub ST,
prędkość wykonywania przez PLC: IL lub ST,
aplikacje wykorzystujące głównie cyfrowe We/Wy oraz prosta regulacja ciągła: LD lub FBD,
łatwość dokonywania zmian w kodzie: LD,
łatwość i umiejętność obsługi przez młodych inżynierów: ST,
łatwość w implementacji skomplikowanych operacji matematycznych: ST,
aplikacje, które cechują powtarzające się operacje lub procesy wymagające łączenia i jednoczesności
operacji: SFC.
Ponieważ nie wszyscy dostawcy sterowników PLC lub PAC dostarczają programy narzędziowe w
pełni zgodne z normą IEC61131-3, na wybór języka programowania może również wpłynąć
wykorzystywana w projekcie platforma sprzętowa.
W rzeczywistości większość pozaeuropejskich dostawców nie oferuje tej funkcjonalności lub
posiada bardzo ograniczone spektrum opcji, np. oferując jedynie język drabinkowy i SFC.
W przypadku małych sterowników – „mikro” PLC – kwestią kluczową z punktu widzenia
różnorodności języków programowania może być również brak wystarczającej ilości pamięci oraz
zbyt mała prędkość procesora.
Wielu programistów skazanych jest na pracę z konkretnym sprzętem. Jeśli jednak programista ma
wpływ na wybór platformy sprzętowej, powinien dobrać najbardziej odpowiedni dla danej aplikacji
język lub grupę języków.
Semestr zimowy 2016/2017, WIEiK-PK
47
Przykład sterownika modułowego PLC
PCD2.M480,
Kaseta główna z szybkim procesorem Motorola Coldfire 5407@162 MHz, 1MB pamięci RAM
(rozszerzalnej o 1MB pamięci Flash EPROM typu R400), obsługa do 64 gniazd modułów
we/wy (do 1024 we/wy), port USB, do 8 łączy komunikacyjnych: gniazdo A dla modułów
PCD7.F1xx, gniazda B1, B2 dla różnych kombinacji modułów funkcyjnych PCD7.F5xx,
sieci PROFIBUS DP, S-Net oraz Ethernet TCP/IP 10/100 Mbit/s, wbudowany Web-Server.
Semestr zimowy 2016/2017, WIEiK-PK
48
24
2016-12-10
Sterownik PCD2.M480
Schemat blokowy sterownika PCD2.M480, firmy SAIA
Semestr zimowy 2016/2017, WIEiK-PK
49
Najbardziej znane na polskim rynku marki sterowników
Raport z 2009, Automatyka B2B
Semestr zimowy 2016/2017, WIEiK-PK
50
25
2016-12-10
Komputery przemysłowe – podstawowe informacje
Komputer przemysłowy (IPC) – komputer przeznaczony do działania w
warunkach przemysłowych (np. w halach fabrycznych).
Charakteryzuje się większą odpornością na warunki zewnętrzne i
zwiększonym poziomem niezawodności działania.
• Rynkiem dla takich komputerów są głównie zakłady przemysłowe,
chociaż można je stosować także jako komputery wbudowane.
Zasadniczym celem ich wykorzystania jest kontrola i sterowanie
procesami przemysłowymi. Jednak architektura logiczna takiego
komputera może być w pełni kompatybilna z komputerami
osobistymi klasy PC. Dzięki temu może to być sprzęt do
specyficznych zastosowań i jednocześnie dobrze udokumentowany,
i powszechnie znany.
• Architektura – IA-32 (Intel x86-32) system GNU/Linux, Microsoft
Windows. Ze względu na zastosowanie w kontrolowaniu procesów,
zwykle uruchamiane są na nich systemy operacyjne czasu
rzeczywistego takie jak QNX, RTLinux lub Windows CE.
Semestr zimowy 2016/2017, WIEiK-PK
51
Komputery przemysłowe
Cechy charakterystyczne komputerów przemysłowych
• zwarta budowa (brak "odstających" elementów),
• możliwość dołączenia modułów (karty typu PCI) lub np. według standardu PC-104 forma "wieżyczki",
• duża wytrzymałość na warunki środowiskowe - przykładowy komputer przemysłowy
może pracować bezbłędnie gdy:
–
–
–
–
•
•
•
temperatura powietrza: 0°C - 60°C (przechowywanie: -40°C - 85°C),
wilgotność wynosi: 0% - 95% (ale bez kondensacji pary wodnej),
oddziałują na niego wibracje,
powietrze jest zapylone,
brak konieczności stosowania wentylatorów do chłodzenia płyty głównej i procesora,
chipset ze zintegrowaną kartą graficzną, sieciową, kontrolerem dysków,
możliwość bezpośredniego podłączenia wyświetlacza LCD do płyty głównej.
Przykładowe wyposażenie komputera przemysłowego
• Zintegrowany w chipsecie kontroler grafiki pozwala uzyskać niezależne obrazy w
wysokiej rozdzielczości poprzez wyjścia DVI, HDMI i LVDS (opcjonalnie).
• Szerokie możliwości komunikacyjne: porty Gigabit Ethernet ( z Wake On LAN), porty
szeregowy: konfigurowalne jako RS-232/422/485 natomiast kolejne 2 RS-422/485 są
izolowane do 7,5kV.
• 6 portów USB 2.0 , 8-bitowe DIO oraz wyjście Audio typu Dual Chanel. Dodatkowo w
standardowym wyposażeniu otrzymujemy 6 programowalnych przycisków
funkcyjnych umieszczonychSemestr
na froncie
obudowy.
zimowy 2016/2017,
WIEiK-PK
52
26
2016-12-10
IPC - Industrial Personal Computer
Przykłady komputerów przemysłowych
Semestr zimowy 2016/2017, WIEiK-PK
53
IPC - Industrial Personal Computer
Przykłady komputerów przemysłowych
Semestr zimowy 2016/2017, WIEiK-PK
54
27
2016-12-10
Rozwój PLC, PAC, IPC
•
•
•
•
•
•
•
•
Funkcjonalność i technologia sterowników programowalnych jest cały czas rozwijana. Na rynku PLC
widoczna jest miniaturyzacja oraz zwiększanie ich możliwości funkcyjnych.
W wyniku wprowadzania zmian coraz łatwiejsze staje się zarządzanie siecią, łączenie PLC z urządzeniami
peryferyjnymi i włączanie ich do systemów sterowania. Rozbudowywane są moduły komunikacyjne.
Stosowane są również zdalne moduły we/wy z użyciem sieci Ethernet, PROFInet, PROFIbus itp. Następuje
integracja sterowników ze światem IT. PLC współpracują z webserwerami, FTP, SQL, WWW, GSM itd. PLC
przejmuje funkcje dedykowanych modułów, np. do sterowania ruchem. Widoczny jest wzrost szybkości,
mocy obliczeniowej i pamięci sterowników, dzięki czemu można sterować coraz większymi procesami w
czasie rzeczywistym.
Zauważalnym trendem na rynku PLC jest zdecydowanie większa swoboda komunikacji. Dodatkowo otwarte
standardy ułatwiają integrację i skracają czas uruchomienia systemu. PLC są również oparte na systemach
embedded (Windows, Linux).
Coraz częściej PLC stosuje się w automatyce domowej - proste sterowanie modułami oświetleniowymi,
kontrolą dostępu, bramami itp.
Kontrolery PAC są naturalną drogą rozwoju sterowników PLC, dlatego znaczący producenci PLC już oferują
lub wkrótce będą mieli je w ofercie.
Komputery przemysłowe IPC w obecnej chwili nie stanowią silnej konkurencji dla PLC. Rozwiązania z IPC
znajdują swoje zastosowania w urządzeniach, gdzie konieczne jest połączenie wysoko specjalizowanych
modułów, np. pomiarowych z wykorzystaniem połączeń ethernetowych, lub wymagana jest komunikacja z
systemami informatycznymi.
W przyszłości kontrolery PAC i IPC będą stanowić konkurencję dla PLC. Urządzenia te są coraz tańsze, a
oferują znaczną różnorodność rozwiązań. W wielu przypadkach sterowanie PLC jest zastępowane systemami
PAC i IPC, mają też dużą moc obliczeniową.
Semestr zimowy 2016/2017, WIEiK-PK
55
28