Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Materiały dydaktyczne
Metrologia i systemy pomiarowe
Semestr III
Wykłady
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
1
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 1: Wybrane zagadnienia metrologii ogólnej.
1. Wybrane zagadnienia metrologii ogólnej
1.1. Pomiar
Obserwacje są pierwotnym i jednocześnie
najbardziej elementarnym procesem
poznawczym polegającym na przyporządkowaniu wrażeń występujących w świadomości
człowieka zjawiskom fizycznym powodowanym przez rzeczy i istoty. Wyniki obserwacji
mają charakter jakościowy i nie muszą stanowić podstawy do uogólnień naukowych
ponieważ są: jakościowe, niejednoznaczne, niepełne, mają charakter subiektywny.
Powyższych wad prawie całkowicie pozbawiony jest proces poznawczy nazywany pomiarem.
Pomiar jest to proces poznawczy polegający na porównaniu z odpowiednią dokładnością
wartości wielkości mierzonej z pewną jej wartością przyjętą za jednostkę miary.
Jednostka miary jest umownie przyjętą i wyznaczoną z dostateczną dokładnością
wartością danej wielkości, która służy do porównywania ze sobą innych wartości tej samej
wielkości.
Wielkościami mierzalnymi, z punktu widzenia metrologicznego, są wszystkie wielkości
pozwalające się zmierzyć, a więc mające jednostki miar.
Wielkości fizyczne mierzalne mogą mieć strukturę ciągłą (analogową) lub ziarnistą
(dyskretną).
Wielkości ciągłe w danym przedziale (zakresie) mogą przybierać nieskończenie wiele
wartości różniących się o nieskończenie małe przyrosty.
Wielkości ziarniste przyjmują w danym przedziale (zakresie) tylko określone wartości
różniące się o skończone przyrosty. Najmniejszy możliwy przyrost stanowi elementarny
kwant (ziarno) wielkości dyskretnej.
Po przyjęciu odpowiedniej jednostki miary można przedstawić miarę każdej wielkości Xw
w postaci iloczynu liczby oderwanej X i jednostki miary am
Xw = Xam
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
2
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
1.2. Układ jednostek miar
Zbiór jednostek wielkości mierzalnych nosi nazwę układu jednostek miar. Obecnie
obowiązuje międzynarodowy układ jednostek, tzw. Układ SI. Różni się on od innych
dotychczas stosowanych tym, że obejmuje wszystkie dziedziny nauki i techniki.
Podstawowymi jednostkami układu SI są: jednostka długości – metr, jednostka masy –
kilogram, jednostka czasu – sekunda, jednostka natężenia prądu – amper, jednostka
temperatury termodynamicznej – kelwin, jednostka światłości – kandela, jednostka liczności
materii – mol. Uzupełniającymi jednostkami tego układu są: jednostka kąta płaskiego – radian
oraz jednostka kąta bryłowego – steradian.
Podstawową zaletą tego układu jest jego spójność – definicje wszystkich jednostek
zawierają współczynniki liczbowe równe jedności.
1.3. Błędy wyników pomiarów
Niezgodność między wynikiem pomiaru, a wartością rzeczywistą wielkości mierzonej
nazywamy błędem pomiaru. Wartość rzeczywista wielkości mierzonej najczęściej nie może
być poznana, dlatego wprowadzono pojęcie wartości poprawnej wielkości.
Wartość poprawna wielkości jest to wartość przybliżona w takim stopniu do wartości
rzeczywistej tej wielkości, że różnica między nimi może być pominięta z punktu widzenia
celu, dla którego pomiar jest wykonywany.
Miarami dokładności pomiaru są: błąd bezwzględny oraz błąd względny pomiaru.
Błędem bezwzględnym pomiaru nazywa się różnicę między wynikiem pomiaru Xm a
wartością rzeczywistą Xr wielkości mierzonej.
∆x = Xm – Xr
Błąd bezwzględny posiada następujące właściwości:
Wyraża się go w jednostkach miary wielkości mierzonej
Może mieć znak dodatni lub ujemny
Nie nadaje się do porównywania narzędzi pomiarowych o różnych zakresach
pomiarowych
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
3
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Znacznie lepiej od błędu bezwzględnego określa niedokładność narzędzi pomiarowych
błąd względny.
Błąd względny to iloraz błędu bezwzględnego i wartości wielkości mierzonej
zastosowanej do obliczenia tego błędu bezwzględnego.
Błąd względny charakteryzuje się następującymi właściwościami:
Jest bezwymiarowy
Może mieć znak dodatni lub ujemny
Bardzo często jest wyrażany w procentach
Charakteryzuje on dokładność pomiaru lepiej niż błąd bezwzględny
Umożliwia porównanie działania narzędzi pomiarowych o różnych zakresach
pomiarowych
Błędy występujące w pomiarach dzieli się na systematyczne i przypadkowe.
Błąd systematyczny jest to błąd, który przy wielu pomiarach tej samej wielkości
mierzonej, wykonywanych w tych samych warunkach, pozostaje stały zarówno co do
wartości bezwzględnej, jak i co do znaku lub zmienia się wg określonego prawa wraz ze
zmianą warunków odniesienia.
Błąd przypadkowy jest to błąd zmieniający się w sposób nieprzewidziany zarówno co
do wartości bezwzględnej, jak i co do znaku przy wykonywaniu dużej liczby pomiarów tej
samej wartości wielkości mierzonej w warunkach praktycznie niezmiennych.
1.4. Wzorce miar jednostek elektrycznych
Wzorzec miary jest to narzędzie pomiarowe odtwarzające, praktycznie niezmienne i z
określoną dokładnością jedną lub kilka wartości danej wielkości.
W metrologii elektrycznej takimi najczęściej używanymi wzorcami są wzorce siły
elektromotorycznej, rezystancji, indukcyjności oraz pojemności.
Wzorce siły elektromotorycznej i napięć
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
4
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Typowymi wzorcami SEM i napięć są: ogniwo Westona oraz wzorce elektroniczne
zbudowane z wykorzystaniem diod Zenera.
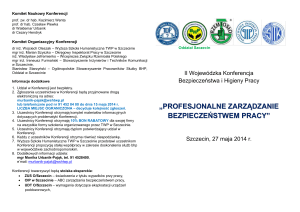
Ogniwo Westona nasycone (rys. 1.4.1) mieści się w szklanym naczyniu o kształcie
przypominającym literę H. Elektrodami ogniwa są druty platynowe wtopione w ramiona
naczynia. Biegunem dodatnim ogniwa jest rtęć (Hg), biegunem ujemnym – amalgamat kadmu
(Cd – Hg), a elektrolitem – nasycony roztwór siarczanu kadmowego (CdSO4). Przewężenia u
dołu ramion naczynia zapobiegają przemieszczaniu się chemikaliów podczas transportu
ogniwa.
Rys. 1.4.1. Nasycone ogniwo Westona.
◦
Wartość znamionową napięcia źródłowego ogniw nasyconych o temperaturze +20 C
wynosi od 1,01854V do 1,01885V, zależnie od stopnia zanieczyszczenia materiałów użytych
do ich budowy.
Z ogniw nie należy pobierać, ani też przepuszczać przez nie prądu dłuższy czas.
Największy dopuszczalny, krótkotrwały prąd pobierany wynosi 1 µA. Pobieranie prądu 1 µA
przez kilka minut powoduje odczuwalne zmniejszenie się napięcia ogniwa wskutek
polaryzacji, jednakże już po krótkim czasie (po kilkunastu minutach) odzyskuje ono właściwą
wartość.
Podstawowymi elementami składowymi elektronicznych źródeł napięć wzorcowych są
elementy o nieliniowej charakterystyce prądowo – napięciowej oraz wzmacniacze operacyjne
z ujemnym sprzężeniem zwrotnym. W praktyce jako elementy o nieliniowej charakterystyce
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
5
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
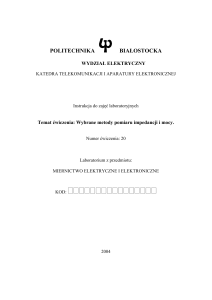
prądowo – napięciowej wykorzystuje się diody Zenera spolaryzowane w kierunku
zaporowym (rys. 1.4.2).
Rys. 1.4.2. Dioda Zenera: a) charakterystyka prądowo – napięciowa; b) symbol graficzny
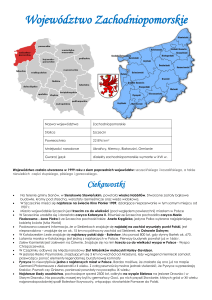
Przykładowe układy elektronicznych wzorców napięcia przedstawiono na rysunku 1.4.3.
Rys. 1.4.3. Schematy ideowe źródeł napięcia:
układ najprostszy z diodą Zenera, układ ze wzmacniaczem operacyjnym
Dla drugiego układu przedstawionego na rysunku 1.4.3:
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
6
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Wzorce rezystancji
Wzorce miary rezystancji są specjalnie zaprojektowanymi i starannie wykonanymi
opornikami. Rezystory wzorcowe wykonuje się z drutu, taśmy lub blachy z materiału
oporowego. Wzorce o małej wartości rezystancji (Rn ≤0,1 Ω) wykonuje się z kawałka drutu
lub blachy w postaci konstrukcji samonośnej zaopatrzonej w zaciski. Wzorce o średnich i
dużych wartościach rezystancji wykonuje się w postaci cewki z izolowanego drutu
rezystancyjnego odpowiednio ukształtowanej i zamkniętej w hermetyzowanej obudowie.
Materiał rezystancyjny, z którego wykonuje się oporniki wzorcowe musi spełniać następujące
wymagania: mieć dużą rezystywność, małą siłę termoelektryczną względem miedzi, mały
współczynnik temperatury rezystancji, stałą wartość rezystancji w czasie. Wszystkie te
wymagania dobrze spełnia materiał o nazwie handlowej manganin i dlatego jest on
najczęściej wykorzystywany do budowy oporników wzorcowych. Przykład konstrukcji
opornika wzorcowego pokazano na rysunku 1.4.4.
Rys. 1.4.4. Konstrukcja opornika wzorcowego: 1 –
zaciski napięciowe, 2 – zaciski prądowe, 3 – zwoje
w przestrzeni hermetyzowanej.
Oporniki dekadowe są wzorcami wielomianowymi rezystancji. Zawierają one zestaw
oporników wzorcowych w układzie dziesiętnym połączonych szeregowo (rys. 1.4.5).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
7
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 1.4.5. Schemat rezystora pięciodekadowego.
Wzorce pojemności
Wzorcami pojemności są kondensatory o specjalnym wykonaniu. Najdokładniejszymi
wzorcami są kondensatory liczalne. W kondensatorze liczalnym pojemność określa się na
podstawie wymiarów geometrycznych. Kształty elektrod są proste, np. kondensator płaski.
Bardzo dokładne kondensatory liczalne buduje się w specjalnym układzie elektrod
walcowych, co pokazano na rysunku 1.4.6.
Rys. 1.4.6. Przekrój kondensatora liczalnego.
Wzorce indukcyjności
Wzorcową miarą indukcyjności odtwarzają cewki nawijane linką miedzianą skręconą z
wielu cienkich, izolowanych drutów, na korpusach z materiału o małym temperaturowym
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
8
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
współczynniku rozszerzalności liniowej. Wzorce posiadają indukcyjność własną od 0,1 mH
do 1H.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
9
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 2: Analogowe przyrządy i przetworniki pomiarowe.
2. Analogowe przyrządy i przetworniki pomiarowe
2.1. Struktury metrologiczne przyrządów pomiarowych
Przyrządem
pomiarowym
nazywamy
narzędzie
pomiarowe,
które
zapewnia
jednoznaczne przetwarzanie wielkości mierzonej na inną wielkość wg znanej zależności lub
na liczbowy wynik tj. wartość tej wielkości mierzonej.
Zadanie takie przyrząd może zrealizować na wiele sposobów. Jeżeli przyrząd pomiarowy
przetwarza ciągłą wielkość mierzoną na inną wielkość ciągłą lub na wychylenie wskazówki
organu ruchomego, mówimy wtedy o analogowym przyrządzie pomiarowym.
Proces przetwarzania wielkości mierzonej na wynik dokonuje się w przyrządzie
pomiarowym w dłuższym łańcuchu przetwarzania. Ogniwa, z których zbudowany jest
łańcuch przetwarzania nazywa się przetwornikami pomiarowymi.
Analogowym przetwornikiem pomiarowym nazywamy przyrząd, który przetwarza
wielkość mierzoną na inną wielkość fizyczną, najczęściej w sposób liniowy, z określoną
znaną dokładnością.
Przetwornik pomiarowy przedstawiony jest graficznie jako prostokąt z wyróżnionymi
sygnałami wejściowym X i wyjściowym Y (rys. 2.1.1).
Rys. 2.1.1. Oznaczenie przetwornika na schematach.
Ze względów strukturalnych rozróżnia się przyrządy pomiarowe o strukturze otwartej
oraz zamkniętej.
W układach o strukturze otwartej (rys. 2.1.2) przetwarzanie informacji pomiarowej
odbywa się tylko w jednym kierunku – od wielkości mierzonej X przez przetworniki P1, P2,
P3 do wielkości wyjściowej Y.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
10
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 2.1.2. Przyrząd pomiarowy o strukturze otwartej – schemat strukturalny.
W przyrządach o strukturze zamkniętej istnieje oddziaływanie wejścia np. przetwornika
końcowego P3 na wejście przetwornika pierwszego P1 (rys. 2.1.3). Przyrządy pomiarowe o
strukturach zamkniętych mają dwa tory przetwarzania: główny (P1, P2, P3) i pętlę sprzężenia
zwrotnego – przetwornik odwrotny P4 (wzorzec nastawialny). Sprzężenie zwrotne może być
zrealizowane samoczynnie i wówczas mówimy o przyrządzie automatycznym. Jeżeli w pętli
sprzężenia zwrotnego pośredniczy obserwator, to mówimy o przyrządzie obsługiwanym
ręcznie.
Rys. 2.1.3. Schemat przyrządu pomiarowego o strukturze zamkniętej.
W przedstawionym układzie na wejście przetwornika P1 oddziałuje różnica wielkości
mierzonej i wzorcowej. W toku pomiaru wykonywanego ręcznie obserwator dąży do stanu, w
którym wielkość wyjściowa przetwornika końcowego P3 jest równa zero. Wówczas wielkość
mierzona i wzorcowa są sobie równe. Czynności wykonywane przez obserwatora można
powierzyć serwomechanizmom.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
11
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
2.2. Właściwości statyczne przyrządów i przetworników pomiarowych
Przetwornik pomiarowy można opisać za pomocą dwu zmiennych wielkości: tzw.
Wielkości wyjściowej (mierzonej) X, która wymusza stan fizyczny przetwornika oraz
wielkości wyjściowej Y, która jest odpowiedzią przetwornika na wymuszenie i jednocześnie
wynikiem przetwarzania (często wynikiem pomiaru).
Jeżeli przez X oznaczymy wielkość stałą na wejściu, a przez Y – wielkość stałą na
wyjściu, to zależność:
Y = F(X)
charakteryzująca dany
przetwornik nazywa się charakterystyką statyczną przetwornika.
Inaczej mówiąc: charakterystyka statyczna przetwornika to zależność sygnału wyjściowego
od wejściowego w stanie ustalonym. Wykres charakterystyki statycznej Y = F(X)
przetwornika może mieć przebieg liniowy lub nieliniowy. W praktyce, w metrologii
przetworniki o charakterystyce statycznej liniowej są najczęściej używane. Przykłady
charakterystyk statycznych pokazano na rysunku 2.2.1.
Rys. 2.2.1. Przykłady charakterystyk przetwarzania:
1 – liniowej, 2 – nieliniowej.
Ważną cechą przetwornika jest nachylenie charakterystyki statycznej nazywane czułością
przetwornika. Czułość jest zdefiniowana wzorem:
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
12
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Czułość przetworników liniowych jest stała w całym zakresie pomiarowym, a przetworników
nieliniowych zmienia się od punktu do punktu charakterystyki statycznej.
Rzeczywisty przetwornik pomiarowy jest urządzeniem zbudowanym przez człowieka.
Ma ono ograniczoną dokładność przetwarzania: rzeczywisty przetwornik tylko w przybliżeniu
realizuje fizyczną zasadę działania. Wszelkie odstępstwa charakterystyki statycznej
przetwornika rzeczywistego od charakterystyki przetwornika idealnego są przyczyną błędów
statycznych. Charakterystyka przetwornika idealnego ma postać: Y = F (X), czyli wielkość
wyjściowa Y zależy tylko i wyłącznie od wielkości wejściowej X. W przypadku przetwornika
rzeczywistego wielkość wyjściowa Y zależy nie tylko od wielkości wejściowej X ale również
od
innych
wielkości Xi
(np.
temperatura,
częstotliwość).
Równanie
określające
charakterystykę statyczną dla przetwornika rzeczywistego jest słuszne tylko w znamionowych
warunkach fizycznych. Naruszenie któregokolwiek warunku powoduje powstanie błędów
systematycznych (błąd przesunięcia zera, zmiana czułości), co przedstawiono na rysunku
2.2.2.
Rys. 2.2.2. Ilustracja wpływu warunków (np. temperatury) na charakterystykę przetwornika:
a) przesunięcie zera; b) zmiana czułości
Dodatkowo, w rzeczywistym przetworniku mogą wystąpić takie zjawiska jak: tarcie, histereza
magnetyczna, cieplna, szum cieplny. Są one przyczyną dodatkowego błędu, tzw. Błędu
histerezy pomiarowej (rys. 2.2.3).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
13
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 2.2.3. Powstawanie błędu histerezy.
Miarą dokładności statycznej przetwornika lub przyrządu pomiarowego jest klasa
dokładności, zdefiniowana wzorem:
gdzie:
∆max – maksymalny bezwzględny błąd zakresowy
x2 – x1 – zakres pomiarowy przetwornika
x1 , x2 – odpowiednio dolna i górna granica zakresu pomiarowego.
Klasa dokładności określa błąd przyrządu pomiarowego w jego normalnych warunkach
użytkowania. Normalne warunki użytkowania określają m.in. temperaturę, wilgotność
otoczenia, częstotliwość, kształt krzywej prądu, ustawienie przyrządu. Umownie przyjęto
następujące wartości klasy: ±0,1%, ±0,2%, ±0,5%, ±1%, ±1,5%, ±2,5%.
2.3. Właściwości dynamiczne przyrządów i przetworników pomiarowych
O właściwościach dynamicznych przyrządu lub przetwornika pomiarowego mówimy
wtedy, gdy wielkość mierzona (sygnał wejściowy) jest
zmienna w czasie. Parametry
dynamiczne przyrządu pomiarowego lub przetwornika najczęściej określa się w oparciu o
odpowiedź skokową (czas ustalenia się wskazań to, przeregulowanie ∆maxY) lub na
podstawie jego charakterystyk częstotliwościowych (np. pasmo przenoszenia B). Odpowiedź
typowego rzeczywistego przetwornika na wymuszenie skokowe o postaci: x(t) = Xm∙ 1(t)
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
14
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
wraz z graficzną interpretacją czasu ustalania się wskazań to oraz przeregulowania ∆maxY
przedstawiono na rysunku 2.3.1.
Rys. 2.3.1. Ilustracja do definicji parametrów dynamicznych przetworników i przyrządów pomiarowych.
Na
rysunku
2.3.2
przedstawiono
logarytmiczną
charakterystykę
częstotliwościową
amplitudową wraz z graficzną interpretacją pasma przenoszenia B.
Rys. 2.3.2. Charakterystyka amplitudowa – ilustracja pasma przenoszenia.
Pasmem przenoszenia B jest przedział częstotliwości, w którym charakterystyka amplitudowa
nie odchyla się od wartości znamionowej o więcej niż 3dB.
W rozpatrywanym przypadku B = (fd, fg).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
15
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
16
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 3: Budowa, zasada działania wybranych przetworników elektromechanicznych.
3. Budowa, zasada działania wybranych przetworników elektromechanicznych
Przetworniki elektromechaniczne są to przetworniki wielkości elektrycznych, najczęściej
natężenia prądu, na wielkość mechaniczną – przemieszczenie wskazówki. Są one stosowane
jako końcowe przetworniki pomiarowe analogowych mierników elektrycznych. W większości
tych
mierników
przetworniki
elektromechaniczne
są
głównymi
przetwornikami
pomiarowymi.
3.1. Przetwornik magnetoelektryczny
W przetwornikach magnetoelektrycznych źródłem momentu napędowego jest wzajemne
oddziaływanie stałego pola magnetycznego i uzwojenie, przez które płynie prąd elektryczny.
Najczęściej organem ruchomym przetwornika jest lekka cewka znajdująca się w
nieruchomym polu magnesu trwałego (rys. 3.1.1).
Rys. 3.1.1. Przetwornik magnetoelektryczny o organie ułożyskowanym na czopach: 1 – magnes trwały, 2 –
cewka ruchoma, 3 – nabiegunniki, 4 – jarzmo, 5 – sprężyna spiralna (górna i dolna), 6 – rdzeń, 7 – wskazówka.
Moment napędowy Mn wyraża się wzorem:
Mn = B ∙ I ∙ z ∙ d,
gdzie:
B – indukcja magnetyczna pola magnesu trwałego
l, d – wymiary liniowe cewki
z – ilość zwojów
I – natężenie prądu przepływającego przez cewkę.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
17
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Momentowi napędowemu, powodującemu obrót cewki (wskazówki) przeciwdziała
moment zwrotny Mz wytwarzany przez sprężyny, proporcjonalny do kąta wychylenia α.
Mz = kα
gdzie:
k – stała sprężyn
α – kąt wychylenia wskazówki.
Położenie równowagi organu ruchomego określa warunek:
Mn = Mz
BIlzd = kα
stąd
α =
Blzd
I = cI
k
przy czym
α =
Blzd
I = const.
k
Przetworniki magnetoelektryczne oznaczane są symbolem
.
Przetworniki magnetyczne wykorzystuje się do budowy amperomierzy i woltomierzy
prądu stałego, omomierzy. W połączeniu z prostownikiem wykorzystywane są do pomiarów
prądów i napięć przemiennych.
3.2. Przetwornik magnetoelektryczny ilorazowy – logometr.
Konstrukcję logometru pokazano na rysunku 3.2.1.
Rys. 3.2.1. Konstrukcja logometru.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
18
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przetwornik magnetoelektryczny ilorazowy zbudowany jest z dwóch ruchomych cewek
połączonych mechanicznie w sposób sztywny. Bloki cewek umieszczone są w szczelinach
magnesu trwałego. Kształt szczelin jest taki, że skojarzone z cewkami pole magnetyczne nie
jest równomierne (rys. 3.2.2).
Rys. 3.2.2. Indukcja w szczelinie przetwornika ilorazowego.
Kierunki prądów w cewkach są dobrane w taki sposób, aby momenty napędowe cewek
były skierowane przeciwnie. Logometr nie posiada sprężyn służących do wytwarzania
momentu zwrotnego.
Indukcja B w szczelinie jest nierównomierna i zależy od kąta obrotu cewki
B = f (α)
Momenty napędowe (przeciwnie skierowane) cewek logometru wyraża się wzorami:
M1 = C1 f(α)I1
M2 = C2f(α- γ)I2
gdzie:
I1, I2 – natężenie prądów przepływających przez cewki
α – kąt między cewkami.
W położeniu równowagi:
M1 = M2
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
19
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
lub
I1
C2f(α − γ)
=
f1(α)
I2
C1f(α)
stąd:
α=f
I1
I2
Kąt odchylenia organu ruchomego, a więc wskazanie przetwornika zależy od ilorazu prądu w
cewkach. Logometry magnetoelektryczne są oznaczane symbolem:
. Logometry
stosowane są w miernikach wielkości nieelektrycznych (np. temperatury) oraz do pomiaru
stanu izolacji.
3.3. Przetwornik elektromagnetyczny
W przetwornikach elektromagnetycznych moment napędowy powstaje w wyniku
wzajemnego oddziaływania (przyciągania lub odpychania) rdzeni wykonanych z materiału
ferromagnetycznego miękkiego. Rdzenie te są magnesowane polem magnetycznym
wytworzonym przez cewkę, w której płynie mierzony prąd. Budowę przetwornika
elektromagnetycznego o okrągłej cewce przedstawiono na rysunku 3.3.1.
Rys. 3.3.1. Przetwornik elektromagnetyczny o okrągłej cewce i dwóch rdzeniach.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
20
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rdzeń nieruchomy zamocowany jest do nieruchomej cewki, przez którą płynie
przetwarzany prąd. Drugi rdzeń jest połączony mechanicznie z osią obrotu organu
ruchomego. Moment zwrotny wytwarza jedna sprężyna spiralna. Moment napędowy powstaje
wskutek odpychania się rdzeni. Zwrot momentu napędowego w przetwornikach
elektromagnetycznych nie zależy od kierunku przepływu prądu mierzonego przez cewkę.
Dlatego tego typu przetworniki mogą być stosowane w pomiarach stałoprądowych, jak i w
pomiarach prądu przemiennego. Wychylenie organu ruchomego α wyraża się wzorem:
∝= 1 dL 2
I
2k dα
gdzie:
L – indukcyjność cewki miernika
k – stała sprężyny
I – natężenie prądu przepływającego przez cewkę
Mierniki elektromagnetyczne należą do
mierników konstrukcyjnie prostych i
niezawodnych. Są stosowane najczęściej jako amperomierze i woltomierze prądu
przemiennego, rzadziej jako mierniki prądu stałego. Są oznaczane symbolem
.
3.4. Przetworniki elektrodynamiczne i ferrodynamiczne
Konstrukcję przetwornika elektrodynamicznego przedstawiono na rysunku 3.4.1.
Rys. 3.4.1. Przetwornik elektrodynamiczny; 1 – cewka nieruchoma, 2 – cewka ruchoma.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
21
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przetwornik elektrodynamiczny ma dwa niezależne obwody elektryczne, które mogą być
zasilane dwoma różnymi prądami. Jeden z tych prądów (rys. 3.4.1) I1 płynie przez cewkę
nieruchomą wytwarzając pole magnetyczne o proporcjonalnym do I1 natężeniu H. Drugi prąd
I2 jest za pomocą sprężynek doprowadzany do cewki ruchomej. Moment napędowy powstaje
w wyniku współdziałania pola H (I1) z prądem I2 płynącym w cewce ruchomej. Dla
odpowiednio dobranych wymiarów cewek można uzyskać niezależność momentu
napędowego od odchylenia ∝:
MN = k I1 I2
Jeżeli obudowy przetwornika zasili się prądami przemiennymi, wówczas moment
napędowy średni wyrazi się wzorem:
MNśr = k I1 I2 cos φ
gdzie:
I1, I2 – wartości skuteczne prądów
Φ – kąt przesunięcia fazowego między prądami I1 i I2
Przetworniki ferrodynamiczne działają w oparciu o tę samą zasadę działania, co
przetwornik elektrodynamiczny. Różnica w budowie pomiędzy nimi polega na tym, że w
przetworniku elektrodynamicznym linie sił pola magnetycznego wytworzonego przez cewkę
nieruchomą zamykają się przez powietrze, a w przetworniku ferrodynamicznym przez
szczelinę i rdzeń z blach ferromagnetycznych.
Przetwornik ferrodynamiczny pokazano na rysunku 3.4.2.
Rys. 3.4.2. Przetwornik ferrodynamiczny; 1 – cewka nieruchoma, 2
– cewka ruchoma, 3 – rdzeń obwodu ferromagnetycznego.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
22
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przetworniki elektrodynamiczne i ferrodynamiczne są wykorzystywane do budowy
amperomierzy i woltomierzy laboratoryjnych prądu stałego oraz woltomierzy prądu
przemiennego. Symbol przetwornika elektrodynamicznego to
ferrodynamicznego to
. Symbol przetwornika
.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
23
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 4: Analogowe przetworniki pomiarowe wielkości elektrycznych.
4. Analogowe przetworniki pomiarowe wielkości elektrycznych
Analogowe przetworniki pomiarowe wielkości elektrycznych można podzielić na trzy
grupy:
Przetworniki skali
Przetworniki rodzaju przebiegu sygnału
Przetworniki rodzaju wielkości
4.1. Przetworniki skali
Charakteryzują się one tym, że przebiegi sygnałów wejściowego i wyjściowego są takie
same, a różnią się tylko skalą lub poziomem mocy. Reprezentantami tej grupy są: dzielniki
napięć, przekładniki, wzmacniacze pomiarowe.
Dzielniki napięć
Dzielniki napięcia są budowane z wzorcowych oporników (dzielniki rezystancyjne),
wzorcowych kondensatorów (dzielniki pojemnościowe) albo jako indukcyjne dzielniki
napięcia (rys. 4.1.1).
Rys. 4.1.1. Dzielniki pomiarowe: a) rezystancyjny; b) pojemnościowy; c) indukcyjny.
Dzielnik napięcia jest przetwornikiem, który zapewnia uzyskanie określonego stosunku
między napięciem wejściowym U1 i wyjściowym U2:
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
24
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
K=
U1
U2
Stosunek K nosi nazwę przekładni (przełożenia) dzielnika. Przekładnia dzielnika
rezystancyjnego (rys. 4.1.1) wynosi K=
R1+R2
R2
, a dzielniki te znajdują zastosowanie przede
wszystkim przy pomiarze napięcia stałego metodą kompensacyjną.
W pomiarach napięcia przemiennego o bardzo dużej wartości (dziesiątki i setki
kilowoltów) znajdują zastosowanie pojemnościowe dzielniki napięcia. Przełożenie dzielnika
pojemnościowego K=
C1+C2
C1
(przy czym C1, C2 jak na rys. 4.1.1). Pojemnościowe dzielniki
stosuje się przy rozszerzaniu zakresu napięciowego woltomierzy elektrostatycznych oraz w
elektroenergetyce przy pomiarach najwyższych napięć. Dokładność pomiarowych dzielników
pojemnościowych jest przeciętna: klasy 0,5; 1; 3. Pojemnościowych dzielników pomiarowych
nie używa się przy pomiarach prądu stałego.
Dzielniki indukcyjnościowe stosuje się w zakresie częstotliwości akustycznych do bardzo
dokładnego pomiaru prądu przemiennego.
Przekładniki prądowe i napięciowe
Przekładniki są transformatorami o specjalnej konstrukcji. Służą do zasilania obwodów
napięciowych lub prądowych przyrządów pomiarowych. Zastosowanie przekładników
umożliwia:
Pomiar dużych wartości prądów i napięć miernikami o mniejszych zakresach
pomiarowych
Odizolowanie
mierników
od
obwodów
wysokiego
napięcia
(względy
bezpieczeństwa)
Umieszczenie mierników w pewnej odległości od obwodu badanego w miejscu
dogodnym dla osoby odczytującej
Przekładniki prądowe mają uzwojenie pierwotne i wtórne nawinięte na rdzeniu
ferromagnetycznym, wykonanym z blach transformatorowych płaskich, lub na rdzeniu
zwijanym z taśmy (rys. 4.1.2).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
25
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 4.1.2. Przekładnik prądowy: a) zasada pracy; b) symbol graficzny.
Uzwojenia są starannie odizolowane od siebie. Izolacja zabezpiecza przed przebiciem
uzwojenia wtórnego wysokim napięciem, które może występować na przewodzie z
mierzonym prądem. Przekładniki prądowe pracują w reżimie zbliżonym do stanu zwarcia
znamionowego transformatora mocy. Wówczas można pominąć prąd magnesujący i
korzystać z przybliżonej zależności
z1I1 = z2I2
przy czym: I1, I2 – wartości skuteczne prądów pierwotnego i wtórnego; z1, z2 – liczby
zwojów uzwojeń pierwotnego i wtórnego. Z zależności tej można określić (z pewnym
błędem) wartość prądu pierwotnego I1 na podstawie pomiaru prądu wtórnego I2.
z1
I1≈ I2
z1
Występujący w wyrażeniu stosunek z1/ z2 nosi nazwę przekładni zwojowej. Przekładnik
napięciowy przedstawiono na rysunku 4.1.3.
Rys. 4.1.3. Przekładnik napięciowy: a) schemat; b) symbol graficzny.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
26
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przekładnik napięciowy jest pomiarowym transformatorem jednofazowym pracującym w
warunkach zbliżonych do stanu jałowego. Umożliwia pomiary i kontrolę parametrów
elektrycznych w sieci wysokiego napięcia przy zastosowaniu aparatury niskiego napięcia w
warunkach pełnego bezpieczeństwa obsługi. Do zacisków pierwotnych przekładnika
doprowadza się napięcie pierwotne U1, do zacisków wtórnych z napięciem U2 dołącza się
przyrządy takie jak woltomierz, częstościomierz, obwody napięciowe watomierza, licznika,
fazomierza, przekaźnika itp. Małe obciążenia przekładnika napięciowego oraz małe
impedancje uzwojeń powodują, że przekładnia rzeczywista Pn określona stosunkiemU1/U2
jest w przybliżeniu równa przekładni zwojowejz1/z2.
Pn=
U1
z1
≈
U2
z2
Wzmacniacze pomiarowe
Wzmacniacz pomiarowy jest przetwornikiem pośredniczącym, który umożliwia pomiary
sygnałów elektrycznych o małej i bardzo małej mocy. Gdy istotną wielkością sygnału jest
napięcie, mówimy o wzmacniaczu napięciowym, gdy natężenie prądu – prądowym. Dzięki
wzmacniaczom rozszerza się obszar pomiarowy na wielkości, które bez wzmacniaczy nie
dałyby się mierzyć i umożliwia się użycie do takich pomiarów pewnych odmian
przetworników z natury swej o niedostatecznej czułości, które bez wzmacniaczy byłyby do
takich celów bezużyteczne.
Współczesne
wzmacniacze
pomiarowe
są
elektronicznymi
układami
półprzewodnikowymi, w których elementem aktywnym (wzmacniającym) jest tranzystor.
Współczesne wzmacniacze elektroniczne najczęściej są wykonywane technologią scaloną
(monolityczną) i są złożoną siecią elementów aktywnych i pasywnych.
Z punktu widzenia metrologicznego wzmacniaczom pomiarowym stawia się następujące
wymagania:
Odpowiednie wzmocnienie (przeważnie duże)
Duża stabilność wzmocnienia
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
27
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Niski próg czułości (uwarunkowany poziomem szumów własnych, sygnałem
niezrównoważenia i dryftem zera)
Duża impedancja (lub rezystancja) wejściowa
Odpowiednia
impedancja
wyjściowa
(wiąże
się
to
z
zapewnieniem
odpowiedniego poziomu sygnału wyjściowego niezbędnego np. do wysterowania
miernika magnetoelektrycznego lub z postacią sygnału wyjściowego)
Małe zniekształcenie sygnału wyjściowego (związane z zniekształceniami
nieliniowymi i szerokością pasma przenoszenia)
Galwaniczna separacja wejścia i wyjścia
Schemat strukturalny wzmacniacza ze sprzężeniem zwrotnym szeregowym napięciowym
pokazano na rysunku 4.1.4.
Rys. 4.1.4. Wzmacniacz z ujemnym sprzężeniem zwrotnym szeregowo – napięciowym.
Zadowalające właściwości metrologiczne wzmacniaczy pomiarowych otrzymuje się
dzięki zastosowaniu we wzmacniaczu o dużym (lub bardzo dużym) wzmocnieniu (w tzw.
Pętli otwartej ujemnego sprzężenia zwrotnego. Sprzężenie zwrotne ujemne może być
realizowane na cztery sposoby: szeregowe napięciowe, równoległe napięciowe, szeregowe
prądowe, równoległe prądowe. Zależnie od sposobu sprzężenia otrzymuje się odpowiednią
podstawową właściwość metrologiczną wzmacniacza, np. szeregowe sprzężenie napięciowe
zapewnia wzmacnianie napięciowe (duża impedancja wejściowa).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
28
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Podstawowe właściwości wzmacniacza pomiarowego napięciowego wyrażają równania:
U2 = KU1
K'
4.1
1
K= 1+βK' ≈ β
4.1a
Zwe = (1 + βK’)Z’we
4.1b
1
ΔoK = ΔoK’ 1+βK'
4.1c
Widać, że wzmocnienie K wzmacniacza z ujemnym sprzężeniem zwrotnym
(napięciowym, szeregowym), zależy od przełożenia β napięcia w pętli sprzężenia przy danym
wzmocnieniu K’ w pętli otwartej. Jeśli K’ jest bardzo duże (np. kilkadziesiąt tysięcy lub
więcej), to wzmocnienie równa się w przybliżeniu 1/ β (bo jedynka staje się nieistotna). Od
przełożenia (dzielnika) β zależy wartość wzmocnienia K i dokładność wzmacniacza. Z
równania 4.1b wynika, że impedancja wejściowa jest (1 + βK’) razy większa niż impedancja
w pętli otwartej. Z równania 4.1c wynika, że względna zmiana wzmocnienia ΔoK
wzmacniacza pomiarowego jest (1 + βK’) razy mniejsza niż względna zmiana wzmocnienia
ΔoK’ wzmacniacza z pętlą otwartą. Ma to duże znaczenie, ponieważ niestałość wzmocnienia
K’ jest bardzo duża i dzięki sprzężeniu jest wielokrotnie zmniejszona.
Istnieją dwa podstawowe, ze względu na przeznaczenie, typy wzmacniaczy
pomiarowych: wzmacniacz prądu stałego i wzmacniacz prądu przemiennego. Dla
każdego z tych typów charakterystyczne jest odpowiednie pasmo częstotliwości
przenoszonych,
tzn.
przedział
częstotliwości
napięcia
wejściowego,
dla
którego
współczynnik wzmocnienia K zmienia się w granicach błędu dopuszczalnego. Na rysunku
4.1.5 przedstawiono charakterystyki wzmacniacza prądu stałego i wzmacniacza prądu
przemiennego.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
29
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 4.1.5. Charakterystyki wzmacniacza: a) prądu stałego; b) prądu przemiennego.
4.2. Przetworniki rodzaju przebiegu sygnału.
Tą grupę urządzeń przetwarzających przebieg napięcia lub prądu stanowią prostowniki
oraz przetworniki termoelektryczne.
Przetworniki prostownikowe
Prostowniki są to przetworniki, za pomocą których odpowiednią miarę wielkości prądu
przemiennego (wartość szczytową, średnią natężenia lub napięcia) przetwarza się na
natężenie lub napięcie prądu stałego. Obecnie do konstrukcji prostowników wykorzystuje się
diody półprzewodnikowe. Charakterystykę prądowo – napięciową diody prostowniczej
pokazano na rysunku 4.2.1.
Rys. 4.2.1. Charakterystyka prądowo - napięciowa diody prostowniczej.
Przykład prostownika przetwarzającego wartość szczytową napięcia przemiennego na
napięcie stałe (UN/U_) przedstawiono na rysunku 4.2.2.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
30
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 4.2.2. Prostownik jednopałkowy z obciążeniem rezystancyjno – pojemnościowym: a)
schemat; b) przebiegi napięć i prądu w układzie.
Lepszymi parametrami charakteryzują się prostowniki dwupółkowe (rys. 4.2.3).
Rys. 4.2.3. Schemat oraz przebiegi napięć i prądu w prostowniku dwupółkowym
z obciążeniem rezystancyjno – pojemnościowym.
4.3. Przetworniki rodzaju wielkości
Do tej grupy przetworników można zaliczyć np. przetwornik napięcia na prąd, mocy na
prąd itp.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
31
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przykład konstrukcji przetwornika mocy czynnej prądu przemiennego
pokazano na
rysunku 4.3.1.
Rys. 4.3.1. Schemat funkcjonalny przetwornika mocy czynnej.
Przetwornik mocy czynnej zawiera układ mnożący oraz układ uśredniający. Jako układ
mnożący może być użyty diodowy układ kwadratorowy, a jako
układ uśredniający –
miliwoltomierz magnetoelektryczny o dużej rezystancji wewnętrznej.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
3. Pióro B., Pióro M., Podstawy elektroniki. Wydawnictwa Szkolne i Pedagogiczne,
Warszawa 1994r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
32
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 5: Pomiary napięcia i natężenia prądu metodą wychyleniową.
5. Pomiary napięcia i natężenia prądu metodą wychyleniową
W metodzie wychyleniowej wartość mierzonego napięcia lub natężenia prądu jest
bezpośrednio wskazywana przez przyrząd pomiarowy. Wskazaniem tym może być
wychylenie wskazówki przetwornika elektromechanicznego, liczba wskazywana przez
miernik cyfrowy, wykres chwilowych zmian wartości napięcia lub prądu przedstawiony na
ekranie oscyloskopu.
Zakres wartości napięcia i natężenia prądu mierzonych metodą wychyleniową wynosi
dla napięcia od ok. 10-11V do 105V, a dla natężenia prądu od 10-12A do 105A. Zakres
częstotliwości napięcia i prądu mierzonych tą metodą wynosi od zera do kilku GHz.
5.1. Pomiar napięcia woltomierzem
Przyrząd służący do pomiaru napięcia nazywa się woltomierzem. Budowane i stosowane
są woltomierze elektromechaniczne i elektroniczne. W celu dokonania pomiaru napięcia na
jednym z elementów obwodu elektrycznego, woltomierz łączy się równolegle z tym
elementem. Biegunowość zacisków woltomierzy służących do pomiaru napięcia stałego jest
oznaczona (znakami + i – ). Zaciski woltomierza służącego do pomiaru napięcia zmiennego
nie są wyróżnione lub wyróżniony i oznaczony (znakiem ┴) jest zacisk, który łączy się z
zaciskiem obwodu kontrolowanego o potencjale równym zeru.
Rezystancja Rv lub ( impedancja Zv) wewnętrzna rzeczywistego woltomierza powinna
być możliwie duża ze względu na dokładność pomiaru. Układ ilustrujący zasadę pomiaru
napięcia stałego przedstawiono na rysunku 5.1.1.
Rys. 5.1.1. Układ do pomiaru napięcia stałego za pomocą woltomierza.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
33
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
W przedstawionym na rsunku 5.1.1 układzie przed załączeniem woltomierza napięcie na
odbiorniku Ro wynosi:
U=
E
R
1+ Rw
o
Po załączeniu woltomierza napięcie mierzone na odbiorniku R przyjmuje wartość:
Uv=
E
R
R
1+ Rw + Rw
o
v
Błąd względny spowodowany rezystancją woltomierza wynosi:
δRV=
1
1+
Rw
R
, gdzie R =
RwR
Rw+Ro
Rw
Dla Ro>>Rw błąd ten wynosi δRv ≈ R
v
5.2. Wybrane przykłady woltomierzy elektromechanicznych
Woltomierz magnetoelektryczny
Jest on najczęściej stosowanym przyrządem służącym do pomiaru napięcia stałego i
pomiaru wartości skutecznej napięcia sinusoidalnego w zakresie częstotliwości 10Hz –
20kHz.
Pomiar napięcia stałego
Układ woltomierza przedstawiono na rysunku 5.2.1.
Rys. 5.2.1. Układ woltomierza.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
34
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Woltomierz napięcia stałego jest zbudowany z przetwornika magnetoelektrycznego o
rezystancji cewki ruchomej r z szeregowo włłączonym opornikiem Rd wykonanym z
manganianu (lub innego materiału o małym współczynniku temperaturowym rezystancji).
Napięcie mierzone U wymusza w woltomierzu prąd
I=
U
r+Rd
gdzie r – rezystancja cewki nawiniętej przewodem miedzianym.
Odchylenie organu ruchomego ustroju jest proporcjonalne do prądu
α = Ci
Po podstawieniu do tego wyrażenia wartości prądu otrzymuje się
∝=c
U
r+Rd
W określonej temperaturze otoczenia rezystancja woltomierza ma wartość stałą (r + Rd =
const = c1), zatem
∝=
c
U=c2U
c1
Odchylenie organu ruchomego woltomierza jest więc proporcjonalne do mierzonego
napięcia. Czułość woltomierza S = dα/dU = c2 ma wartość stałą, podziałka jest więc
równomierna. Podziałkę można wywzorcować bezpośrednio w jednostkach napięcia:
woltach, kilowoltach lub miliwoltach.
Rozszerzenia zakresu pomiarowego woltomierza dokonuje się przez szeregowe
dołączenie dodatkowego rezystora Rd1 nazywanego posobnikiem (rys. 5.2.2).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
35
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 5.2.2. Rozszerzenie zakresu pomiarowego woltomierza.
Wartość rezystancji posobnika dana jest wzorem:
Rd1 = (n – 1) Rv
gdzie:
Rv = r + Rd
Un'
n = U
n
–
rezystancja wewnętrzna amperomierza
–
mnożnik zakresu
Pomiar napięcia zmiennego
W woltomierzu magnetoelektrycznym służącym do pomiaru napięcia przemiennego prąd
płynący przez przetwornik jest prostowany za pomocą prostownika jednopałkowego lub
dwupółkowego. Odpowiednie przykłady rozwiązań układowych pokazano na rysunku 5.2.3.
Rys. 5.2.3. Układ woltomierza magnetoelektrycznego do pomiaru napięcia zmiennego:
a) z prostownikiem; b), c) z prostownikiem dwupółkowym.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
36
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
W woltomierzu magnetoelektrycznym napięcia zmiennego przez przetwornik przepływa
prąd pulsujący. W stanie ustalonym, z powodu bezwładności i tłumienia organu ruchomego,
odchylenie α jest proporcjonalne do średniej wartości prądu płynącego przez przetwornik.
α = CJśr = C1Uśr
W obwodach prądu przemiennego jako wartości charakterystyczne napięcia i natężenia
prądu stosuje się wartości skuteczne, więc podziałkę miernika skaluje się w wartościach
skutecznych, przy założeniu, że wielkości mierzone mają przebiegi sinusoidalne o znanym
współczynniku kształtu.
Im
I
π
kk= = √2 = ≈ 1,11
2
Iśr
2√2
Im
Podziałka jest wykonana w taki sposób (zmniejszona długość działek), że wartości odczytane
są 1,11 razy większe od wartości średnich prądu, czyli przy przebiegu sinusoidalnym są
równe wartościom skutecznym. Tak wykonana podziałka traci ważność przy przebiegach
odkształconych. Posługiwanie się przyrządem prostownikowym przy pomiarze wartości
skutecznej
przebiegu
odkształconego
powoduje
powstanie
błędu
zależnego
od
współczynnika kształtu przebiegu kk. Błąd procentowy:
δ%=
1,11-kk
100
kk
Woltomierz elektromagnetyczny
Z zasady działania przetwornika elektromagnetycznego wynika, że może być on użyty do
pomiaru napięcia stałego i zmiennego. Najczęściej woltomierz elektromagnetyczny stosuje
się do pomiaru napięć przemiennych o częstotliwości 50Hz. Układ woltomierza napięcia
zmiennego przedstawiono na rysunku 5.2.4.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
37
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 5.2.4. Układ woltomierza elektromagnetycznego.
W celu pomiaru napięcia szeregowo z
cewką przetwornika elektromagnetycznego
(reprezentowaną na rysunku 5.2.4 opornością Rc i indukcyjnością Lc) łączy się posobnik Rd.
Odchylenie organu ruchomego przy pomiarze napięcia zmiennego wynosi:
11
U2
dL
α= 2 k (Rc+Rd)2+w2L2 dα
Posobnik Rd służy do rozszerzania zakresu pomiarowego oraz kompensacji błędów
częstotliwościowego i temperaturowego woltomierza. Kondensator C bocznikujący posobnik
Rd służy do kompensacji błędu częstotliwościowego. Woltomierze elektromagnetyczne
stosowane są do pomiaru napięcia w zakresie 5 ÷ 700V.
5.3. Woltomierze elektroniczne
Rozwój technologii i konstrukcji elementów i układów półprzewodnikowych, a
zwłaszcza
układów
scalonych
spowodował
upowszechnienie
się
woltomierzy
elektronicznych. Woltomierze można podzielić na dwie grupy:
Woltomierze
elektroniczne
analogowe
(nazywane
woltomierzami
elektronicznymi)
Woltomierze cyfrowe
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
38
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Woltomierze analogowe
Schemat blokowy woltomierza elektronicznego analogowego przedstawiono na rysunku
5.3.1.
Rys. 5.3.1. Schemat blokowy woltomierza elektronicznego.
Składa się on z następujących zespołów: układu wejściowego, przetwornika
elektronicznego, wskaźnika i zasilacza.
Układ wejściowy służy do zmiany zakresów pomiarowych woltomierza, najczęściej jest
to dzielnik napięcia lub wtórnik napięciowy.
Przetwornik elektroniczny służy do przetworzenia mierzonego napięcia na prąd o
wartości średniej proporcjonalnej do tego napięcia. Przetwornik elektroniczny często jest
urządzeniem bardzo rozbudowanym. W zależności od przeznaczenia woltomierza, w skład
przetwornika mogą wchodzić następujące układy elektroniczne: wzmacniacz pomiarowy
prądu stałego, detektor, wzmacniacz pomiarowy napięcia zmiennego, wzmacniacz
selektywny, mieszacz, generator, przetwornik napięcia stałego na zmienne i inne. Wskaźnik
jest najczęściej przetwornikiem magnetoelektrycznym. Układ woltomierza napięcia stałego
pokazano na rysunku 5.3.2.
Rys. 5.3.2. Schemat blokowy woltomierza elektronicznego do pomiaru napięcia stałego.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
39
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przetwornik elektroniczny woltomierza napięcia stałego jest wzmacniaczem prądu
stałego. Powinien on zapewnić wzmocnienie mocy sygnału wejściowego do poziomu
umożliwiającego wysterowanie wskaźnika magnetoelektrycznego.
Schemat blokowy woltomierza elektronicznego do pomiaru napięcia zmiennego
przedstawiono na rysunku 5.3.3.
Rys. 5.3.3. Schemat blokowy woltomierza elektronicznego do pomiaru napięcia zmiennego.
W
woltomierzu
elektronicznym
służącym
do
pomiaru
napięcia
zmiennego
przetwornikiem elektronicznym jest prostownik lub prostownik i wzmacniacz pomiarowy
prądu stałego.
Woltomierze cyfrowe
Rozwój cyfrowej techniki pomiarowej spowodował upowszechnienie się woltomierzy
cyfrowych. W porównaniu z innymi woltomierzami, woltomierze cyfrowe cechuje duża
dokładność pomiaru, krótki czas pomiaru, postać wyniku dogodna do odczytu oraz cyfrowego
przetwarzania i przechowywania informacji. Budowę woltomierza cyfrowego przedstawiono
na rysunku 5.3.4.
Rys. 5.3.4. Schemat blokowy woltomierza cyfrowego.
Woltomierz cyfrowy składa się z następujących podstawowych zespołów: układu
wejściowego, przetwornika analogowo – cyfrowego, wskaźnika cyfrowego i zasilacza.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
40
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Układ wejściowy służy do zmiany zakresów pomiarowych woltomierza cyfrowego. Jest
on wykonany w sposób podobny jak w woltomierzu elektronicznym. W woltomierzach
cyfrowych często proces zmiany zakresów pomiarowych oraz przełączania biegunowości jest
zautomatyzowany. W układach wejściowych woltomierzy cyfrowych służących do pomiaru
napięcia stałego często stosowany jest filtr dolnoprzepustowy. Zadaniem tego filtru jest
tłumienie napięcia zmiennego doprowadzanego wraz z napięciem mierzonym do wejścia
woltomierza. Częstotliwość graniczna tego filtru powinna być wystarczająco mała.
5.4. Pomiar natężenia prądu amperomierzem
Przyrząd służący do pomiaru natężenia prądu nazywa się amperomierzem. W celu
pomiaru prądu płynącego przez jeden z elementów obwodu elektrycznego, amperomierz
łączy się szeregowo z tym elementem. Biegunowość zacisków amperomierza służącego do
pomiaru prądu stałego jest oznaczona (znakami + i –). Zaciski amperomierza służącego do
pomiaru prądu zmiennego nie są wyróżnione. Schemat układu pomiaru natężenia prądu
stałego amperomierzem przedstawia rysunek 5.4.1.
Rys. 5.4.1. Układ do pomiaru prądu amperomierzem.
5.5. Amperomierze elektromechaniczne – wybrane przykłady
Do pomiaru prądu najczęściej są stosowane amperomierze elektromechaniczne. W
zależności od
rodzaju przetwornika rozróżnia się amperomierze: magnetoelektryczny,
elektromagnetyczny i elektrodynamiczny.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
41
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Amperomierze magnetoelektryczne
Amperomierz
magnetoelektryczny należy do najczęściej stosowanych przyrządów
służących do pomiaru natężenia prądu stałego i wartości skutecznej natężenia prądu
sinusoidalnego o częstotliwości 20 Hz ÷20 kHz w zakresie od ok. 10 μA do 10 A. Sam
przetwornik magnetoelektryczny jest amperomierzem i służy do pomiaru natężenia prądu
stałego do 0,5 A. Górny zakres pomiarowy takiego amperomierza jest ograniczony
wytrzymałością cieplną przetwornika. Do rozszerzenia zakresu pomiarowego amperomierza
magnetoelektrycznego stosowane są boczniki. W celu kompensacji błędu temperaturowego
amperomierza z bocznikiem, szeregowo z przetwornikiem łączy się opornik wykonany z
materiału o małym współczynniku temperaturowym rezystancji. Opornik ten powoduje
wzrost rezystancji amperomierza.
Układ amperomierza
magnetoelektrycznego służącego do pomiaru prądu stałego
przedstawiono na rysunku 5.5.1. Natężenie prądu mierzonego I oblicza się z zależności:
I=ip 1+
Rp+Rk
Rb
Rys. 5.5.1. Układ amperomierza magnetoelektrycznego.
Oznaczając n = I/ip otrzymuje się:
Rb=
Rp+Rk
n-1
W amperomierzu magnetoelektrycznym służącym do pomiaru prądu zmiennego prąd
płynący przez przetwornik jest prostowany. Do tego celu stosowane są prostowniki
półprzewodnikowe,
jednopołówkowe
i
dwupołówkowe
(rys.
5.5.2).
Nieliniowość
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
42
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
charakterystyki napięciowo – prądowej diody prostowniczej powoduje nieliniową zależność
między natężeniem prądu mierzonego i odchyleniem organu ruchomego przetwornika. Do
rozszerzenia zakresu pomiarowego amperomierza magnetoelektrycznego prostownikiem są
stosowane boczniki.
Rys. 5.5.2. Układ amperomierza magnetoelektrycznego do pomiaru prądu zmiennego: a) z prostownikiem
jednopołówkowym; b) z prostownikiem dwupołówkowym; c) z prostownikiem dwupołówkowym i bocznikiem.
Amperomierze elektromagnetyczne
Amperomierze elektromagnetyczne są produkowane we wszystkich klasach dokładności
i służą do pomiaru prądu w zakresie od kilku miliamperów do setek amperów. Dolny zakres
pomiarowy amperomierza elektromagnetycznego ogranicza duża impedancja cewki,
ponieważ cewka amperomierza służącego do pomiaru małego prądu musi mieć dużą liczbę
zwojów. Górny zakres pomiarowy jest ograniczony możliwościami konstrukcyjnymi, cewka
przetwornika musi być bowiem wykonana z przewodu o dużym przekroju. Amperomierze
elektromagnetyczne często są budowane jako wielozakresowe. Zmianę zakresów uzyskuje się
najczęściej za pomocą odczepów z cewki.
Rys. 5.5.3. Zmiana zakresu pomiarowego amperomierza
elektromagnetycznego za pomocą odczepów z cewki.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
43
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Odchylenie organu ruchomego przetwornika elektromagnetycznego zależy od kwadratu
prądu płynącego przez cewkę przetwornika, zatem amperomierze elektromagnetyczne mogą
być używane do pomiaru prądu stałego i zmiennego. Wskazania obecnie produkowanych
amperomierzy elektromagnetycznych są zwykle takie same przy prądzie stałym i zmiennym.
Przy pomiarze prądu zmiennego amperomierz elektromagnetyczny wskazuje wartość
skuteczną mierzonego prądu.
5.6. Amperomierze elektroniczne
Schemat typowego elektronicznego amperomierza przedstawiono na rysunku 5.6.1.
Rys. 5.6.1. Schemat funkcjonalny amperomierza elektronicznego: a) prądu stałego; b) prądu przemiennego.
Układ tego typu amperomierza zawiera bocznik Rb, na którym mierzy się spadek napięcia
za pomocą miliwoltomierza elektronicznego.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
44
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 6: Pomiary napięcia i natężenia prądu metodami kompensacyjnymi.
6. Pomiary napięcia i natężenia prądu metodami kompensacyjnymi
Metody kompensacyjne należą do szerszej grupy metod pomiarowych, zwanych
metodami zerowymi. Pomiary metodami zerowymi polegają na stwierdzeniu zerowej różnicy
między wartością mierzoną i wartością wzorcową. Stwierdzenia zerowej różnicy dokonuje się
za pomocą wskaźników zera, odznaczających się dużą czułością. Taki sposób pomiaru
odznacza się dwoma istotnymi cechami: w procesie pomiarowym może uczestniczyć
wzorzec, a ponadto w chwili stwierdzenia zerowej różnicy następuje bezpośrednie
porównanie wartości mierzonej z wzorcową. Wymienione cechy są bardzo korzystne z
punktu widzenia definicji pomiaru i stawiają metody zerowe w rzędzie najdokładniejszych
metod pomiarowych.
O dużej dokładności metod zerowych decydują następujące cechy:
Minimalny pobór mocy z układu badanego
Duża czułość osiągana w wyniku zastosowania czułych wskaźników zera
6.1. Kompensacyjne pomiary napięć stałych
Pomiar kompensacyjny napięcia elektrycznego polega na porównaniu napięcia
mierzonego Ux ze znaną wartością napięcia wzorcowego Uwz. W układzie kompensacyjnym
pokazanym na rysunku 6.1.1 galwanometr wskazuje różnicę napięć Ux i Uwz. Przez regulację
wartości napięcia wzorcowego można doprowadzić wskazanie galwanometru do zera. Stan
kompensacji zachodzi, gdy galwanometr nie wykazuje przepływu prądu, Ig = 0; wtedy Ux =
Uwz.
Rys. 6.1.1. Zasada kompensacji napięć.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
45
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
W układzie pomiarowym realizującym metodę kompensacyjną pomiaru napięcia,
zwanym dalej kompensatorem, do nastawiania wartości napięcia wzorcowego wykorzystuje
się regulowany spadek napięcia na oporniku wzorcowym, który jest zasilany z pomocniczego
obwodu prądowego. Ta regulacja może być dokonywana prze zmianę prądu lub zmianę
rezystancji. Stąd podział kompensatorów na dwa podstawowe układy:
Kompensatory o regulowanym prądzie pomocniczym
Kompensatory o stałym prądzie pomocniczym
Schemat kompensatora o regulowanym prądzie pomocniczym przedstawiono na rysunku
6.1.2.
Rys. 6.1.2. Kompensator o regulowanym prądzie pomocniczym Ip.
Kompensator o stałym prądzie pomocniczym przedstawiono na rysunku 6.1.3.
Rys. 6.1.3. Kompensator o stałym prądzie pomocniczym Ip (kompensacja pojedyncza).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
46
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Kompensator ten różni się od kompensatora z rysunku 6.1.2 tym, że opornik
kompensacyjny Rk jest regulowany. Zmiany Rk nie mogą naruszać stałej wartości prądu
pomocniczego Ip – jest to jedno z podstawowych wymagań konstrukcyjnych w
kompensatorach o stałym prądzie pomocniczym i jego rozwiązanie prowadzi do różnych
odmian układowych. Taki sposób postępowania, tzw. Kompensacja pojedyncza, prowadzi
jednak do pomiarów mało dokładnych, głównie z powodu ograniczonej dokładności wskazań
miliamperomierza. W celu zwiększenia dokładności pomiarów stosuje się tzw. Kompensację
podwójną, która umożliwia wykorzystanie ogniwa wzorcowego w procesie pomiarowym.
Schemat kompensatora wyjaśniający zasadę podwójnej kompensacji pokazano na
rysunku 6.1.4.
Rys. 6.1.4. Kompensator o stałym prądzie pomocniczym (kompensacja podwójna).
Różni się on od układu z rysunku 6.1.3 tylko tym, że zawiera ogniwo wzorcowe Ewz
umieszczone w obwodzie napięciowym. Pomiar napięcia Ux wymaga tutaj kolejnego
skompensowania napięć: wzorcowego Ewz i mierzonego Ux. Sposób postępowania jest taki
sam jak w kompensacji pojedynczej; galwanometr można przełączać w odpowiednie obwody
(pozycje 1 i 2 przełącznika). W wyniku obu kompensacji otrzymuje się
(poz. 1)
Ewz = IpRk1
oraz
(poz. 2)
Ux = IpRk2
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
47
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Ze stosunku otrzymanych zależności oblicza się wartość mierzonego napięcia Ux
Ux=Ewz
IpRk2
Rk2
= Ewz
IpRk1
Rk1
Należy zwrócić uwagę, że końcowa postać równania jest słuszna jedynie przy założeniu, że
kolejne kompensacje wykonano przy nie zmienionym prądzie pomocniczym Ip. Uzyskane
równanie wskazuje, że przy Ip = const mierzone napięcie Ux jest bezpośrednio porównane z
napięciem wzorcowym Ewz pomnożonym przez stosunek rezystancji Rk2/Rk1. Bezpośrednie
porównanie z wzorcem umożliwia osiągnięcie najwyższych dokładności. Dlatego
kompensatory budowane według idei wskazanej na rys. 6.1.4 są zaliczane do dokładnych
kompensatorów laboratoryjnych.
6.2. Kompensacyjny pomiar napięcia zmiennego
Kompensacja napięć przemiennych zachodzi, gdy galwanometr prądu przemiennego
włączony między dwa napięcia o jednakowej częstotliwości wskaże brak różnicy
potencjałów. Oznacza to, że porównywane napięcia są równe i przeciwnie skierowane. Żeby
napięcia przemienne były równe, muszą mieć: jednakowe częstotliwości, jednakowe kształty
przebiegów, jednakowe wartości i zgodne fazy. Warunki te są spełnione wtedy, gdy wartości
chwilowe napięć kompensowanych są jednakowe w czasie pomiaru. Najłatwiej można spełnić
te wymagania przy zasilaniu kompensatora i obwodu badanego z tego samego źródła prądu
przemiennego.
Ze względu na metodę nastawienia wartości i fazy napięcia kompensującego,
kompensatory napięcia przemiennego można podzielić na dwie grupy:
Kompensatory pracujące w układzie współrzędnych biegunowych
Kompensatory pracujące w układzie współrzędnych prostokątnych
Na rysunku 6.2.1 przedstawiono układ kompensatora z regulacją we
współrzędnych
biegunowych.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
48
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 6.2.1. Kompensator z regulacją we współrzędnych biegunowych.
Napięciem kompensującym Uk jest spadek napięcia na oporniku Rk, którego zmiany
umożliwiają regulację amplitudy Uk. Do regulacji fazy napięcia Uk służy urządzenie zwane
przesuwnikiem fazowym. Przesuwnik fazowy umożliwia dowolne przesunięcie fazy napięcia
pomocniczego Up nie zmieniając przy tym jego amplitudy, a więc także wartości spadku
napięcia na oporniku Rk. Ostatecznie obie regulacje (amplitudy i fazy Uk) są od siebie
niezależne. W stanie skompensowania – stwierdzonym np. za pomocą galwanometru
wibracyjnego (Ig = 0) – obowiązuje zależność:
Ux = IpRk
Z której wyznaczamy wartość skuteczną napięcia mierzonego Ux, gdyż prąd Ip jest mierzony
za pomocą miliamperomierza wskazującego wartość skuteczną. Kąt fazowy mierzonego
napięcia Ux odczytujemy z podziałki przesuwnika fazowego.
Dokładność pomiaru kompensatorami napięcia przemiennego jest w znacznej mierze
ograniczona klasą dokładności zastosowanego amperomierza. Dodatkowym źródłem błędów
pomiaru
może
być
nieidentyczność
kształtów
krzywych
napięcia
mierzonego
i
kompensującego. Galwanometr selektywny umożliwia stwierdzenie zgodności podstawowych
harmonicznych, natomiast obecności wyższych harmonicznych nie wykrywa się w czasie
pomiaru. Amperomierz w obwodzie kompensatora mierzy wartość skuteczną prądu, dlatego
też obliczone napięcie kompensujące Uk jest wartością skuteczną. Jeśli napięcie
kompensujące jest sinusoidalne, a napięcie mierzone zawiera wyższe harmoniczne, to
kompensatorem mierzy się tylko wartość skuteczną pierwszej harmonicznej napięcia
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
49
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
mierzonego, a nie wartość skuteczną całego przebiegu odkształconego, którą wyznacza się z
zależności
Ux=√U12+U22+U32+…
przy czym: U1, U2, U3 – wartości skuteczne kolejnych harmonicznych.
Znamionowy błąd pomiaru kompensatorów napięcia przemiennego wynosi zwykle około
0,5%.
6.3. Kompensacyjny pomiar natężenia prądu
Metoda kompensacji prądów znalazła zastosowanie w pomiarach prądów stałych
(kompensacja prądów zmiennych trudniejsza i ekonomicznie nieopłacalna). Przykład
rozwiązania układowego kompensatora prądu stałego przedstawiono na rysunku 6.3.1.
Rys. 6.3.1. Kompensator prądu stałego.
Stan kompensacji w tym układzie (Ig = 0) zachodzi, gdy spełniony jest warunek:
IxR1 – (Ik – Ix) Rz = 0
skąd:
Ix=
R2
Ik
R1+R2
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
50
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Z wyprowadzonej zależności wynika, że stan skompensowania można osiągnąć dwoma
sposobami:
Przez zmianę prądu Ik (przy R1=const i R2=const)
Przez zmianę przekładni dzielnika – najczęściej zmianę rezystancji R1 (przy
Ik=const)
Wartość prądu Ik można określić za pomocą np. amperomierza.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
51
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 7: Pomiary rezystancji.
7. Pomiary rezystancji
Pomiaru rezystancji prądem stałym dokonuje się różnymi metodami, zależnie od wartości
mierzonej i wymaganej dokładności. Do najważniejszych z nich można zaliczyć: metodę
techniczną, metodę bezpośredniego odczytu z wykorzystaniem omomierza, metody wątkowe.
7.1. Metoda techniczna i jej modyfikacje
Metoda techniczna polega na pośrednim wyznaczeniu rezystancji Rx poprzez pomiar
napięcia i natężenia prądu. Odpowiednie układy pomiarowe przedstawiono na rysunku 7.1.1.
Wskazania woltomierza (U) i amperomierza (I) są podstawą do wyznaczenia badanej
rezystancji.
Rx=
U
I
Rys. 7.1.1. Pomiar rezystancji Rx metodą techniczną: a) układ poprawnie mierzonego natężenia prądu; b) układ
poprawnie mierzonego napięcia.
Wartość badanej rezystancji Rx obliczona na podstawie wskazań woltomierza i
amperomierza w obu przedstawionych na rysunku 7.1.1 układach jest obarczona błędem
wynikającym z poboru mocy przez przyrządy. Odpowiednie obliczenie niedokładności tych
dwóch wariantów metody technicznej przedstawiono w tabeli 7.1.2.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
52
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Tab. 7.1.2. Obliczanie niedokładności metody technicznej.
Układ
wg rys. 7.1.1 a
Wartość zmierzona Rm
Wartość poprawna
Rx = Ux/Ix
Niedokładność bezwzględna
U
I
U–UA
I
UA
I
U
I
U
I–Iv
U
1
-Rx=
-Rx
1
1
Ix–Iv
+
Rx
RV
1
−
R
1 + RV
x
= RA
ΔΔP = Rm – Rx
Niedokładność względna
Δ°ΔP =
∆∆P
wg rys. 7.1.1 b
RA
Rx
Rx
RA i RV – rezystancje amperomierza i woltomierza
Modyfikacjami metody technicznej są metody: porównania napięć i porównania prądów.
Metodę porównania napięć pokazano na rysunku 7.1.3.
Rys. 7.1.3. Pomiar rezystancji Rx metodą porównania napięć.
W tej metodzie mierzymy spadki napięć UN = I RN oraz Ux – I Rx. Przy założeniu dużej
rezystancji woltomierza wynik pomiaru ma postać:
Ux
Rx = RN U
N
Metodę porównywania prądów pokazano na rysunku 7.1.4.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
53
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 7.1.4. Pomiar rezystancji Rx metodą porównania prądów.
Przy założeniu pomijalnie małej rezystancji amperomierza dokonujemy pomiaru
IN = U/RN oraz Ix = U/Rx. Stąd wartość rezystancji:
Rx = RN
IN
Ix
7.2. Omomierze
Omomierz szeregowy przedstawiono na rysunku 7.2.1.
Rys. 7.2.1. Omomierz szeregowy.
Zawiera on
źródło napięcia U, opornik dodatkowy Rd, magnetoelektryczny
miliamperomierz o rezystancji wewnętrznej RA. Opornik badany Rx jest przyłączony do
zacisków zewnętrznych omomierza. Natężenie prądu Ix płynącego w obwodzie omomierza
jest określone zależnością:
Ix=
U
U
=
Rd+RA+Rx
Rs+Rx
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
54
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
w której Rs = Rd +RA – wewnętrzna rezystancja omomierza szeregowego.
Przy stałych wartościach U oraz Rs natężenie prądu Ix zależy tylko od wartości
rezystancji Rx.
W celu wyznaczenia podziałki omomierza należy określić zależność między odchyleniem
wskazówki miliamperomierza α i wartością Rx. Uwzględniając równanie miernika
magnetoelektrycznego: α = SiIx (gdzie Si – czułość prądowa miliamperomierza) otrzymujemy:
USi
α = R +R
s
x
Podziałka omomierza wyrażona tym równaniem jest nieliniowa i zależy od doboru
stałych: Rs, Si, U.
Omomierz równoległy przedstawiono na rysunku 7.2.2.
Rys. 7.2.2. Omomierz równoległy.
Miliamperomierz wskazuje przy α:
IA=
U
RdRA
Rd+RA+ R
x
i przy stałych wartościach U, Rd, RA może być wywzorcowany w omach.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
55
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
7.3. Metody mostkowe
Mostek Wheatstone’a
Typowy układ mostkowy, tzw. Mostek Wheatstone’a pokazano na rysunku 7.3.1.
Rys. 7.3.1. Mostek czteroramienny.
Na przedstawiony układ mostkowy składają się następujące elementy:
Oporniki R1, R2, R3 i R4 tworzące cztery ramiona mostka
Źródło zasilające o stałej sile elektromotorycznej E i rezystancji wewnętrznej Rw
Wskaźnik zera prądu stałego, np. galwanometr statyczny G o rezystancji
wewnętrznej Rg (lub wskaźnik elektroniczny). Jednym z czterech ramion mostka
jest rezystancja mierzona, np. R1 = Rx
Istnieją dwie metody pomiaru rezystancji Rx za pomocą mostka: metoda wychyleniowa i
metoda zerowa.
W metodzie wychyleniowej (stosowanej rzadziej) wykorzystuje się zależność natężenia
prądu Ig w gałęzi galwanometru od poszczególnych parametrów układu mostkowego,
określoną najogólniej równaniem:
Ig = f(R1, R2, R3, R4, Rg, Rw, E)
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
56
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Jeśli zmienną będzie tylko rezystancja mierzona R1 = Rx, przy pozostałych wielkościach
nie zmienionych (Ig = f(Rx; const), to wartość Rx można wyznaczyć ze wskazania
galwanometru. W mostkach realizujących metodę wychyleniową możliwe jest takie dobranie
parametrów układu, że w pewnym zakresie zmian Rx zależność Ig = f(Rx) jest praktycznie
liniowa.
W pomiarach mostkowych najczęściej wykorzystuje się metodę zerową. Wówczas
pomiar Rx polega na sprowadzeniu mostka do stanu, w którym natężenie prądu Ig = 0. Jest to
stan równowagi mostka, osiągany poprzez odpowiednie nastawienie wartości rezystancji w
ramionach mostka i stwierdzany za pomocą wskaźnika zera. Z warunku Ig = 0 wynikają
kolejne, charakterystyczne związki:
Różnica potencjałów między punktami C, D mostka
UCD = 0
(7.3.1)
Natężenie prądów w ramionach
I1 = I3 oraz I2 = I4
(7.3.2)
Spadki napięć na odpowiednich ramionach
UAC = UAD oraz UCB = UDB
(7.3.3)
czyli
I1R1 = I2R2 oraz I3R3 = I4R4
(7.3.4)
skąd po uwzględnieniu równania 7.3.2 otrzymujemy
R1
R2
=
R3
R4
Zależność 7.3.4 stanowi warunek równowagi mostka.
Po sprowadzeniu mostka do stanu równowagi możemy wyznaczyć mierzoną wartość
R1=Rx korzystając z obowiązującego wówczas warunku równowagi
Rx=R3
R2
R4
przy czym: R2, R3, R4 – rezystancje o znanych wartościach (wzorce nastawne).
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
57
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Błedy przy pomiarach mostkiem Wheatstone’a
Pomiary wykonywane mostkiem Wheatstone’a mogą być obarczone różnymi błędami
wynikającymi z konstrukcji samego mostka, z parametrów wskaźnika równowagi i źródła
zasilania oraz na skutek działania zewnętrznych czynników zakłócających. Do głównych,
bezpośrednich przyczyn powstawania błędów pomiaru zalicza się:
Niedokładność wykonania oporników mostka
Rezystancje połączeń i zestyków w przełącznikach
Niedostateczną czułość mostka
Wpływ czynników zewnętrznych na zmianę rezystancji mostka
Działanie napięć termoelektrycznych.
Mostek Thomsona
Mostek Thomsona jest przeznaczony do pomiaru małych rezystancji. Pokazano go na
rysunku 7.3.2.
Rys. 7.3.2. Mostek Thomsona.
Składa się on z sześciu rezystorów umieszczonych w ramionach mostka, galwanometru
magnetoelektrycznego w przekątnej pomiarowej i źródła napięcia (zwykle bateria
akumulatorów) w przekątnej zasilania. Rezystory R’3 i R3 oraz R’4 i R4 są parami równe. W
stanie równowagi (prąd w galwanometrze równy zeru) R1R4 = R2R3. Rezystory R1 i R2,
zwykle czterozaciskowe, mają małe rezystancje. Dzięki strukturze mostka rezystancje
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
58
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
przewodów łączących dodają się w warunku równowagi tylko do dużych rezystancji R3 i R4,
co praktycznie nie zmienia ich wartości i umożliwia pomiar małej rezystancji.
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
4. Encyklopedia metrologii. Wydawnictwo Naukowo – Techniczne, Warszawa 1989r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
59
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 8: Pomiary mocy watomierzami.
8. Pomiary mocy watomierzami
Watomierz elektrodynamiczny lub ferrodynamiczny stosuje się do pomiarów mocy
czynnej, głównie w obwodach prądu przemiennego. Układ watomierza elektrodynamicznego
pokazano na rysunku 8.1.1.
Rys. 8.1.1. Układ watomierza elektrodynamicznego.
Cewka nieruchoma przetwornika elektrodynamicznego stanowi obwód prądowy
watomierza, który włącza się szeregowo w przewód doprowadzający prąd do odbiornika Ro.
Cewka ruchoma uzupełniona rezystorem dodatkowym Rd tworzy obwód napięciowy, który
włącza się równolegle na napięcie odbiornika. Watomierze elektrodynamiczne mogą być
stosowane do pomiarów mocy czynnej przy prądzie stałym, jak i zmiennym.
W przypadku prądu stałego, wskazania watomierza α wyraża się:
α = SwUI
gdzie: U,I oznaczają wartości napięcia i natężenia prądu stałego.
Przy sinusoidalnych przebiegach napięcia n(t) = Umsin cot i prądu i(t) = Im sin(wt – φ)
wskazanie watomierza wynosi:
α = SwUIcosφ
gdzie: U,I oznaczają wartości skuteczne napięcia i prądu.
Φ – kąt przesunięcia fazowego pomiędzy napięciem a natężeniem prądu.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
60
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Watomierz na schematach jest oznaczany symbolem:
Początki uzwojeń prądowego i napięciowego oznaczone są kropkami.
8.2. Pomiar mocy prądu stałego
Moc pobieraną przez odbiornik prądu stałego można zmierzyć metodą bezpośrednią za
pomocą watomierza elektrodynamicznego w układzie pokazanym na rysunku 8.2.1.
Rys. 8.2.1. Układy do pomiaru mocy prądu stałego za pomocą watomierza:
a) układ poprawnie mierzonego prądu; b) układ poprawnie mierzonego napięcia.
8.3. Pomiary mocy czynnej prądu przemiennego
Pomiar mocy w układach jednofazowych
Moc czynną pobraną przez odbiornik jednofazowy mierzy się w takim samym układzie,
jaki stosowano przy pomiarze mocy prądu stałego za pomocą watomierza. W ten sposób
oblicza się również wynik pomiaru, błąd graniczny oraz moc pobraną przez obwody
przyrządu, wstawiając do wzorów wartości skuteczne wielkości.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
61
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Pomiar mocy w układach trójfazowych symetrycznych
W sieci czteroprzewodowej obciążonej symetrycznie moc wszystkich faz jest jednakowa.
Wystarczy zatem zmierzyć moc jednej fazy a wskazanie watomierza przemnożyć przez 3
(rys. 8.3.1).
Rys. 8.3.1. Układ do pomiaru mocy w sieci
czteroprzewodowej obciążonej symetrycznie.
Moc całkowita obwodu trójfazowego wynosi:
P = 3P1
W sieciach bez przewodu zerowego, obciążonych symetrycznie, moc mierzy się jednym
watomierzem w układzie ze sztucznym punktem zerowym (rys. 8.3.2).
Rys. 8.3.2. Układ do pomiaru mocy w sieci
trójprzewodowej obciążonej symetrycznie.
Obwód napięciowy watomierza o rezystancji R1 wraz z rezystancjami R2 i R3 równymi
R1 stanowi symetryczną gwiazdę, dzięki czemu watomierz jest włączony na napięcie fazowe i
prąd fazowy. Tak samo jak w poprzednim układzie moc całkowita obwodu trójfazowego:
P = 3P1
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
62
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Pomiar mocy w układach trójfazowych niesymetrycznych
W układach trójfazowych czteroprzewodowych, obciążonych dowolnie stosuje się
połączenie trzech watomierzy w układzie jak na rysunku 8.3.3.
Rys. 8.3.3. Układ do pomiaru mocy w sieci
czteroprzewodowej obciążonej niesymetrycznie.
Całkowita moc obwodu jest równa sumie wskazań watomierzy:
P = P1 + P2 + P3
W sieciach trójprzewodowych obciążonych niesymetrycznie stosuje się układ dwóch
watomierzy, tzw. Układ Arona (rys. 8.3.4).
Rys. 8.3.4. Sposoby włączania dwóch watomierzy do pomiaru mocy czynnej w układzie Arona.
Układ Arona umożliwia pomiar mocy w sieci 3 – fazowej bez przewodu zerowego przy
symetrycznym napięciu zasilającym i przy dowolnym obciążeniu. Moc całkowita obwodu jest
sumą wskazań obu watomierzy:
P = P1 + P2
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
63
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8.4. Pomiary mocy biernej
Pomiary mocy biernej w układach 3 – fazowych realizuje się watomierzami łączonymi w
podobne układy, jak w przypadku pomiarów mocy czynnej.
W sieci czteroprzewodowej obciążonej niesymetrycznie moc bierną mierzy się trzema
watomierzami połączonymi jak na rysunku 8.4.1.
Rys. 8.4.1. Układ do pomiaru mocy biernej trzema watomierzami.
Wskazanie każdego z watomierzy jest √3 razy większe od mocy biernej danej fazy.
Całkowitą moc bierną oblicza się ze wzoru:
Q=
P1+P2+P3
√3
W przypadku sieci trójprzewodowej układ z rysunku 8.4.1 również mierzy dokładnie.
Podstawowym układem do pomiaru mocy biernej w sieci trójprzewodowej obciążonej
dowolnie jest układ z dwoma watomierzami, przedstawiony na rysunku 8.4.2.
Rys. 8.4.2. Układ pomiaru mocy biernej dwoma watomierzami.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
64
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Moc bierną oblicza się wg wzoru:
Q = √3 (P1 = + P2)
gdzie: P1, P2 – wskazania watomierzy
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
65
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Temat 9: Pomiary indukcyjności, pojemności i rezystancji strat.
9. Pomiary indukcyjności, pojemności i rezystancji strat
Podstawowymi
przyrządami
do
pomiaru
indukcyjności
cewek,
pojemności
kondensatorów i ich rezystancji są mostki prądu przemiennego. W przypadku gdy nie
dysponuje się odpowiednim przyrządem pomiarowym, parametry dławików nieliniowych,
kondensatorów energetycznych, a także przy innych pomiarach L lub C stosuje się metody
techniczne pomiaru.
9.1. Metody techniczne
W najprostszej metodzie technicznej używa się woltomierza i amperomierza prądu
przemiennego, włączonych jak w układach na rysunku 9.1.1.
Rys. 9.1.1. Układy pomiarowe metody woltomierza i amperomierza.
Tę metodę pomiaru indukcyjności lub pojemności elementów stosuje się w przypadkach, gdy
ich rezystancja szeregowa jest wielokrotnie mniejsza od reaktancji, czyli gdy R ≪X. Można
wtedy przyjąć, że reaktancja elementu jest równa jego impedancji
U
Z= ≈X
I
Stąd można określić mierzoną indukcyjność lub pojemność
L=
C=
X
U
=
ω
2πfI
1
I
=
ωX
2πfU
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
66
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Do grupy technicznych metod pomiaru impedancji można również zaliczyć pomiary
wykonywane w układzie przedstawionym na rysunku 9.1.2, w którym impedancję określa się
z pomiaru spadków napięć UZ, UN, U na szeregowo połączonych elementach badanym Z i
wzorcowym RN.
Dla uniknięcia błędów w pomiarze napięć żąda się, aby zastosowane
mierniki napięcia miały moduły impedancji wejściowych bardzo duże w porównaniu z
modułem impedancji Z i rezystancją RN. Jeśli do pomiaru zastosuje się trzy woltomierze, to
ze związków geometrycznych wykresu wskazowego oraz podanych na nim zależności (rys.
9.1.2) można następująco określić parametry badanej impedancji:
φ=arccos
U2–UN2–UZ2
2UNUZ
Z=RN
UZ
UN
R=Zcosφ
X=√Z2-R2
Rys. 9.1.2. Pomiar impedancji metodą pomiaru napięć UZ, UN, U.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
67
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
9.2. Wybrane mostki prądu przemiennego
Na rysunku 9.2.1 przedstawiono czteroramienny mostek prądu zmiennego.
Rys. 9.2.1. Czteroramienny mostek prądu zmiennego.
Podstawową i najczęściej stosowaną zasadą pomiaru impedancji metodami mostkowymi
jest zasada sprowadzania mostka do stanu równowagi ( Ig = 0) a następnie obliczenie
mierzonej impedancji Zx z prostych, obowiązujących w tym stanie zależności, zwanych
warunkami równowagi. Stan równowagi uzyskuje się przez zmiany impedancji ramion
mostka i wykrywa za pomocą wskaźnika zera. Warunki równowagi mostka mogą być
wyprowadzone z ogólnego schematu jak na rysunku 9.2.1, w którym przyjmuje się Ig = 0.
Wówczas spadki napięć na ramionach AC i AD mostka są sobie równe, czyli:
UAC = UAD
tzn.
U
U
Z1=
Z2
Z1+Z3
Z2+Z4
skąd
Z1Z4 = Z2Z3
Zależność ta wyraża ogólny warunek równowagi mostka czteroramiennego.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
68
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Mostek Maxwella
Mostek Maxwella jest stosowany do pomiaru impedancji o charakterze czynno –
indukcyjnościowym (rys. 9.2.2).
Rys. 9.2.2. Mostek Maxwella z wzorcem indukcyjności własnej.
Element badany reprezentuje szeregowo połączone indukcyjność Lx i rezystancję Rx.
Wzorcami nastawnymi są cewka o indukcyjności własnej LN i znanej rezystancji resztkowej
rN oraz opornik RN. Ramionami pomocniczymi (stosunkowymi) są stałe oporniki R1 i R2.
Warunki równowagi są następujące:
Lx=LN
R1
R2
Rx=(RN+rN)
R1
R2
Z równań tych wynika, że stan równowagi mostka nie zależy od zmiany napięcia
zasilającego.
Mostek Wiena
Mostek Wiena jest przeznaczony do pomiarów pojemności i kąta stratności
kondensatorów. Uproszczony układ pomiarowy mostka przedstawiono na rysunku 9.2.3.
Pojemność mierzoną Cx porównuje się w mostku z pojemnością Cw kondensatora
wzorcowego. Rezystancje Rx i Rc przedstawiają sobą straty kondensatora badanego i
wzorcowego.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
69
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rys. 9.2.3. Układ mostka Wiena.
Równoważenie mostka dokonuje się kolejno opornikami R4 i R2. W stanie równowagi,
gdy galwanometr wykazuje zerowe napięcie, zachodzi równość
Z1Z4 = Z2Z3
Mierzone wartości określone są wzorami stanowiącymi dwa warunki równowagi
Cx=Cw
R4
R3
Rx=(Rc+R2)
R3
R4
LITERATURA
1. Chawaleba A., Poniński M., Siedlecki A., Metrologia elektryczna. Wydawnictwo
Naukowo – Techniczne, Warszawa 1979r.
2. Hagel R., Bielański K., Dyszyński J., Miernictwo elektryczne. Wydawnictwa Szkolne i
Pedagogiczne, Warszawa 1975r.
3. Marcyniuk A., Piasecki E., Pluciński M., Szadkowski B., Podstawy Metrologii
Elektrycznej. Wydawnictwo Naukowo – Techniczne, Warszawa 1984r.
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
70