Nr 50
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Politechniki Wrocławskiej
Studia i Materiały
Nr 22
Nr 50
2000
napęd elektryczny prądu przemiennego,
przekształtniki częstotliwości,
sterowanie częstotliwościowe, silniki indukcyjne
Bronisław FIRAGO*, Leszek PAWLACZYK**
ELEKTROMECHANICZNE PROCESY PRZEJŚCIOWE
UKŁADU NAPĘDOWEGO Z SILNIKIEM ASYNCHRONICZNYM
I SKALARNYM STEROWANIEM CZĘSTOTLIWOŚCIOWYM
Przeprowadzono analizę działania elektrycznego układu napędowego prądu przemiennego
z asynchronicznym silnikiem klatkowym i skalarnym sterowaniem częstotliwościowym. Silnik
zasilany jest z falownika napięcia z modulacją szerokości impulsów MSI i pracuje w zakresie
stabilizacji strumienia skojarzonego ze stojanem 1. Określono charakter procesów
elektromechanicznych w układzie jednomasowym w przypadku, gdy prędkość kątowa zadawana jest
liniowo i nieliniowo w kształcie „S” charakterystyki.
Porównano właściwości dynamiczne układów jednomasowego z dwumasowym i elementem
sprężystym. Przeprowadzono badania symulacyjne układu dla napędu przenośnika taśmowego o mocy
160 kW.
1. WPROWADZENIE
Zastosowanie nowoczesnych regulowanych układów napędowych w wielu gałęziach
przemysłu związane jest głównie z zastosowaniem częstotliwościowo sterowanych układów
z falownikami napięcia i asynchronicznymi silnikami klatkowymi. Tendencja ta dotyczy
również układów napędowych przenośników taśmowych [6]. Falowniki napięcia
z modulacją szerokości impulsów MSI (PWM), które stanowią podstawę budowanych
obecnie układów, sterowane są metodami wektorowymi lub skalarnymi. Układy sterowania
skalarnego są z reguły układami prostszymi, zapewniającymi dobrą dynamikę i dużą
płynność sterowania. Najczęściej w takich układach przeprowadza się stabilizację strumieni
maszyny w stanach statycznych i w możliwie dużym zakresie również w stanach dyna-
_____________
* Białoruska Akademia Politechniczna w Mińsku, F. Skaryna Ave. 65, 220027 Mińsk, Białoruś,
e-mail: [email protected].
** Instytut Maszyn, Napędów i Pomiarów Elektrycznych, Politechnika Wrocławska, ul.
Smoluchowskiego 19, 50-372 Wrocław, e-mail: [email protected].
132
micznych. Stabilizacji podlegają najczęściej strumień skojarzony ze stojanem 1, wirnikiem
2, lub strumień w szczelinie m. Zakres regulacji takich układów napędowych osiąga
wartość do 1: 50 bez stosowania sprzężeń prędkościowych z zachowaniem dużej sztywności
charakterystyk mechanicznych, co w większości przypadków praktycznych jest
wystarczające.
Spośród układów stabilizacji strumieni najbardziej korzystnym wydaje się układ ze
stabilizacją strumienia skojarzonego ze stojanem 1, dla którego własności
elektromechaniczne napędu są zbliżone do układu z naturalnymi charakterystykami
elektromechanicznymi, a realizacja układu stabilizacji jest technicznie prosta IR 1 –
kompensacja [2, 3]. W takim przypadku formowanie procesów dynamicznych przeprowadza
się poprzez odpowiednie sterowanie częstotliwością prądu stojana (w czasie rozruchu,
hamowania, zmiany prędkości napędu) [2]. Największe zastosowanie mają procesy liniowej
zmiany częstotliwości w procesach przejściowych, kiedy wielkość przyspieszenia pozostaje
stała. Ponadto w praktyce stosuje się również zmianę prędkości według charakterystyki typu
„S”, a także charakterystyki o przebiegu wykładniczym.
Ponieważ w procesie skalarnego sterowania częstotliwościowego chwilowa wartość
momentu elektromagnetycznego w procesie przejściowym nie pozostaje stała, należy
wyjaśnić, z jaką dokładnością utrzymywane jest przyspieszenie, a tym samym, jaka jest
jakość procesu sterowania prędkością taśmociągu. Problem ten może być dokładnie zbadany
w przypadku pełnego modelowania maszyny asynchronicznej, przekształtnika i uwzględnienia elementów sprężystych napędu przenośnika. Jednakże dla uproszczonej analizy
i wstępnego doboru elementów napędu celowym wydaje się wyznaczenie uproszczonych
zależności analitycznych do obliczeń elektromechanicznych procesów przejściowych dla
układu jednomasowego, a następnie uwzględnienie elementów sprężystych i modelowanie
układu dwumasowego oraz układu z pełnym opisem dynamiki maszyny asynchronicznej
zasilanej z przekształtnika częstotliwości.
2. CHARAKTERYSTYKI MECHANICZNE SILNIKA ASYNCHRONICZNEGO
DLA STEROWANIA CZĘSTOTLIWOŚCIOWEGO I STABILIZACJI
STRUMIENIA STOJANA 1 = const
2.1. CHARAKTERYSTYKI MECHANICZNE
Charakterystyki mechaniczne trójfazowego asynchronicznego silnika klatkowego
w przypadku częstotliwościowego sterowania i stabilizacji strumienia 1=const można
określić zależnościami [4]:
M
2M k
s a s ak
s ak
sa
0 n s a
(1)
133
gdzie:
2
3E sn
1 R2
x
f
Mk
; s ak
; 1 1 1 ; 1 ;
2 0 n 1 x1 1 x 2
x1 1 x 2
x
f1n
0n
2 f1n
0 n
; sa
; E sn
Pb
0n
U n sin n 2 U n cos n I1n
(2)
R1 2
x1 , x2 , x – reaktancje schematu zastępczego przy częstotliwości nominalnej, f1 , f1n –
chwilowa i nominalna częstotliwość napięcia stojana, 1n – synchroniczna prędkość kątowa
dla nominalnej częstotliwości, Pb – liczba par biegunów silnika, Un – nominalne napięcie
fazowe silnika, Esn – nominalna siła elektromotoryczna indukowana w stojanie strumieniem
1, sa – poślizg silnika, Mk, sak – moment i poślizg krytyczny, M, – chwilowa wartość
momentu elektromagnetycznego i prędkości kątowej silnika asynchronicznego.
Krytyczny moment elektromagnetyczny silnika w przypadku stabilizacji strumienia 1
związany jest z momentem krytycznym naturalnej charakterystyki silnika zależnością:
2
2
M k Ψ 1 const E sn R1 R1 xk
M k U1 const U n 1 x1 1 x2
2
(3)
Zależność ta jest zbliżona do jedności i zależy w nieznaczny sposób od parametrów
silnika. Dla badanego silnika asynchronicznego typu 4A315S4U3 o mocy 160 kW stosunek
(3) wynosi 0,998. W związku z tym charakterystyki dla 1 = const praktycznie odpowiadają
charakterystykom silnika przy U1 = const dla nominalnej częstotliwości prądu stojana.
2.2. CHARAKTERYSTYKI DYNAMICZNE JEDNOMASOWEGO UKŁADU LINIOWEGO
Zakładając, że w przypadku sterowania częstotliwościowego silnik pracuje na liniowej
części charakterystyk mechanicznych z modułem sztywności i przy stałej wartości
momentu obciążenia M0, dla liniowej zmiany prędkości kątowej 0 wirowania pola
magnetycznego silnika można zapisać:
dM
M 0 t
dt
d
M M0 J
dt
0 t 0 p 0t
TE
(4)
gdzie: 0p – początkowa wartość prędkości kątowej wirującego pola magnetycznego, na
rozpatrywanym odcinku czasowym, 0 – wartość zadana przyspieszenia kątowego
0 0 k 0 p / t 0 , 0k – końcowa wartość prędkości kątowej w procesie przejściowym,
t 0 – czas liniowej zmiany prędkości kątowej pola magnetycznego silnika, M / –
moduł sztywności charakterystyki, TE – elektromagnetyczna stała czasowa silnika
134
asynchronicznego, określona zależnością TE 1 / 2 f1n skn , s kn – poślizg krytyczny dla
naturalnej charakterystyki, J – moment bezwładności napędu sprowadzony do wału silnika.
Równaniom (4) odpowiada schemat strukturalny zlinearyzowanego układu
napędowego (rys. 1). Zależność (4) dla stosunku TE /TM < 4, kiedy występują tłumione
oscylacje momentu i prędkości ma rozwiązanie:
t 0 p 0m d 0 0 t ~m e t sin t 1
(5)
M t M 0 M d 0 M ~ m e t sin t 2
(6)
gdzie:
0 m
M0
; d 0
M d0
; M d 0 J 0 ; ~ m
0 m d 0 0 p p ; p
2
M p M0
J
;
p M p 1
m4 m
; M ~ m M 1
2TM
M
TE
p 0
2
1
J
; TM
2TE
(7)
2
; M M 0 M d 0 M p
p M p 1
; 2 arc tg
1 arc tg
p 0
M
TE
1
0, d 0, p – statyczny, zadany dynamiczny i początkowy spadek prędkości, Mp – początkowy moment elektromagnetyczny, p – początkowe przyspieszenie silnika,
– współczynnik tłumienia drgań w procesie przejściowym, – częstotliwość drgań
własnych układu, TM – elektromechaniczna stała czasowa, ~m ; M ~m – wartości
maksymalne składowych okresowych prędkości kątowej i momentu elektromagnetycznego,
1; 2 – przesunięcia fazowe składowych okresowych prędkości kątowej i momentu
elektromagnetycznego.
0 p ( p)
0 ( p)
1
p
M O ( p)
1 TE p
1
Jp
( p)
M ( p)
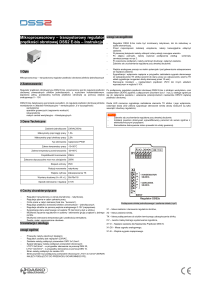
Rys. 1. Schemat strukturalny jednomasowego układu napędowego dla liniowej zmiany częstotliwości
pola magnetycznego w procesie przejściowym
Fig. 1. The dynamic model block diagram of a one mass electrical drive system for a linear change of
135
rotating magnetic field speed in transients
W przypadku liniowego zadawania prędkości kątowej pola magnetycznego silnika
asynchronicznego napędzającego przenośnik taśmowy z biernym momentem obciążenia,
w czasie rozruchu występuje czas opóźnienia, dopóki moment elektromagnetyczny nie
osiągnie wartości momentu obciążenia. Czas opóźnienia wyznacza się zależnością:
tz
0
(8)
Na tym odcinku czasowym 0 t t z stan nieustalony opisany jest równaniami:
0 t 0 t ; t 0; M t 0 t TE 1 e t / TE
(9)
Od momentu tz procesy przejściowe opisane są zależnościami (5)–(7).
Po zakończeniu liniowej zmiany prędkości kątowej pola magnetycznego ma miejsce
elektromechaniczny proces przejściowy, z niezerowymi warunkami początkowymi. Na
odcinku czasowym 0 t 10 TE ; t t t 0 proces ten jest opisany równaniami prędkości
kątowej i momentu elektromagnetycznego:
t s ~ m1 e t sin t 3
(10)
M t M s M ~ m1 e t sin t 4
(11)
gdzie:
s 0 s ; ~ m1 0 p d 0
3 ar ctg
0
/
0 p d 0
; M
0
1
1 2
0 p d 0
~ m1
M d0
1
2
2
2 M kp
1
M
d0
2
(12)
2 M kp
; M kp 0 p
4 ar ctg / 1
M
d0
W elektrycznym układzie napędowym [1, 3], dla współczynnika m TM / TE 0,5
i jednomasowego układu elektromechanicznego oraz liniowego zadawania prędkości
procesy oscylacyjne są bardzo słabe i najczęściej proces przejściowy rozpatrywany jest tylko
jako czysto mechaniczny. Jednakże dla napędu z silnikami asynchronicznymi średniej
i dużej mocy z dużą sztywnością charakterystyk, co ma miejsce w napędzie niektórych
napędów taśmociągów, warunek m > 0,5 nie zawsze jest spełniony. W pracy były
przeprowadzane badania stanów nieustalonych napędu przenośników taśmowych
w przypadku sterowania częstotliwościowego silnikiem asynchronicznym klatkowym typu
4A315S4U3 o mocy 160 kW i stabilizacji strumienia skojarzonego ze stojanem 1 = const.
136
Współczynnik bezwładności wynosi = J/J1 = 1,6, natomiast moment obciążenia równy jest
znamionowemu. Ponadto przyjęto, że maksymalny moment silnika nie powinien
przekraczać dwóch momentów maksymalnych (przeciążalność silnika m = 2,2). Te warunki
określiły czas liniowej zmiany prędkości pola magnetycznego silnika t0 = 0,8 s i zadane
przyspieszenie kątowe 0 = 196,35 [s–2].
Dla rozpatrywanego silnika i jego parametrów [4] wyznaczono parametry układu
napędowego: elektromechaniczną stałą czasową TE = 0,0655 s, współczynnik tłumienia
= 7,36 s–1,
współczynnik
sztywności
charakterystyk
= 582,123 Nms,
elektromechaniczną stałą czasową Tm = J / =0,0085 s, współczynnik m = TM /TE =0,13,
częstotliwość drgań własnych m4 m / 2TM 41,61 s 1 .
Wykorzystując
obliczone
zależności
otrzymano
przebiegi
momentu
elektromagnetycznego i prędkości w czasie rozruchu i hamowania jednomasowego
zlinearyzowanego układu napędowego taśmociągu (rys. 2) w przypadku liniowego
zadawania prędkości i obciążeniu znamionowym momentem.
M[Nm]; n[obr/min]
3000
M
n
2000
1000
0
0
0.5
1
1.5
2
2.5
t[s]
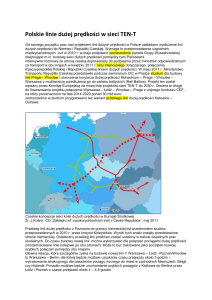
Rys. 2. Przebiegi prędkości obrotowej i momentu elektromagnetycznego w trakcie rozruchu i hamowania
częstotliwościowego ze znamionowym momentem i przy liniowym zadaniu prędkości
Fig. 2. The speed and electromagnetic troque of frequency controlled induction motor at starting
and at braking a nominal loaded conveyor with a linear frequency change
Jak wynika z przeprowadzonej analizy, nawet przy bardzo małym stosunku stałych
czasowych układu napędowego m = 0,13, wahania prędkości kątowej są nieznaczne, chociaż
oscylacje momentu elektromagnetycznego są znaczące.
2.3. CHARAKTERYSTYKI DYNAMICZNE UKŁADU DWUMASOWEGO
Z ELEMENTEM SPRĘŻYSTYM
W przypadku uwzględnienia sprężystości w części mechanicznej napędu, układ
przekształca się w dwumasowy. Równanie charakterystyczne układu jest szóstego rzędu
(bez uwzględniania inercyjności przekształtnika częstotliwości), co nie pozwala na
137
otrzymanie przejrzystych rozwiązań analitycznych procesu przejściowego. Schemat
strukturalny liniowego układu dwumasowego przedstawiono na rys. 3. Procesy przejściowe
w układzie są badane za pomocą symulacji komputerowej. W układzie występują dwa
momenty bezwładności: J1 – silnika i J2 – taśmociągu, element sprężysty ze
współczynnikiem
sprężystości
(dla
taśmociągów
c = (106–108)Nmdeg–1)
i
–1
współczynnikiem tarcia t (dla taśmociągów t = (60–600) Nmsdeg ). Na rys. 4
przedstawiono przebiegi czasowe w układzie liniowym dwumasowym dla liniowej zmiany
prędkości kątowej w czasie rozruchu i hamowania taśmociągu i znamionowego momentu
obciążenia.
1 ( p)
0 ( p) 1
1
J1 p
TE p 1
p
2 ( p)
1
c
t
p
J2 p
M 0 ( p)
0 p ( p)
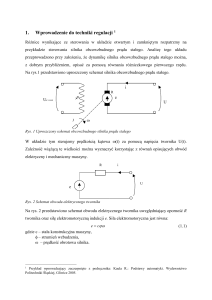
Rys. 3. Schemat strukturalny układu dwumasowego dla liniowej zmiany prędkości kątowej
Fig. 3. The dynamic model block diagram of a two-mass electrical drive system
for a linear frequency change in transients
M[Nm]; n[obr/min]
3000
M1
n
2000
M2
1000
0
0
0.5
1
1.5
2
t[s]
Rys. 4. Przebieg prędkości n i momentu elektromagnetycznego M 1 oraz momentu M 2
układu dwumasowego dla liniowej zmiany prędkości
Fig. 4. The speed n and electromagnetic trogue M 1 of a two-mass electrical drive system
for a linear freguency change
3. CHARAKTERYSTYKI DYNAMICZNE UKŁADU NAPĘDOWEGO DLA PEŁNEGO
MODELU MASZYNY ASYNCHRONICZNEJ
Zastosowanie do badań symulacyjnych uproszczonego modelu liniowego układu
napędowego (rys. 1 i 3) może prowadzić do powstania dużych błędów, szczególnie gdy
138
poślizg maszyny przekroczy wartość krytyczną, co może mieć miejsce w stanie
dynamicznym w przypadku sterowania skalarnego w otwartym układzie regulacji prędkości.
Dla pełnej analizy procesów przejściowych należy uwzględnić nieliniowy model
maszyny asynchronicznej zasilanej z trójfazowego przekształtnika częstotliwości
z modulacją MSI [5]. Układ sterowania skalarnego zapewnia stabilizację strumienia 1
w stanie statycznym i dynamicznym. Badania symulacyjne układu napędowego taśmociągu
przeprowadzono za pomocą programu MATLAB–SIMULINK dla silnika 4A315S4U3
z uwzględnieniem zmian reaktancji magnesującej x i rezystancji wirnika r2 .
Proces przejściowy w układzie jednomasowym dla liniowej zmiany prędkości w czasie
rozruchu i hamowania oraz obciążenia momentem znamionowym przedstawiono na rys. 5.
Natomiast na rys. 6 pokazano przebiegi czasowe prędkości, momentu oraz modułu wektora
prądu stojana w układzie jednomasowym dla „S” – zadania prędkości w czasie rozruchu i
hamowania ze znamionowym momentem obciążenia.
Rys. 5. Przebieg prędkości i momentu elektromagnetycznego silnika dla liniowej zmiany prędkości
w czasie rozruchu i hamowania
Fig. 5. The speed and electromagnetic trogue of frequency controlled induction motor at starting
and at braking a nominal loaded conveyor with a linear frequency change
3000
M [N m ]; n [o b r/m in ]; I [A ]
2500
M
2000
n
1500
I
1000
500
0
0
0 .6
1 .2
1 .8
2 .4
3 .0
t[s ]
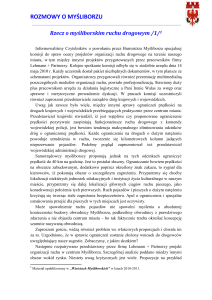
Rys. 6. Prędkość i moment elektromagnetyczny silnika indukcyjnego w czasie rozruchu i hamowania
139
z momentem znamionowym i krzywą zmian prędkości typu „S”
Fig. 6. The speed and electromagnetic troque of frequency controlled induction motor at starting
and braking a nominal loaded conveyor with a „S” – curve freguency change
4. WNIOSKI
1. W układzie skalarnego sterowania częstotliwościowego w przypadku płynnej
regulacji częstotliwości procesy elektromagnetyczne mają duży wpływ na ogólny przebieg
procesu przejściowego w układzie napędowym taśmociągu.
2. Otrzymane zależności analityczne dla liniowego układu jednomasowego pozwalają
wyznaczyć przebiegi momentu elektromagnetycznego i prędkości kątowej w przypadku
liniowej zmiany prędkości kątowej w czasie rozruchu i hamowania z dużą dokładnością
w stosunku do „pełnego” modelu napędu uwzględniającego nieliniowe parametry silnika
i układ sterowania falownikiem napięcia z MSI.
3. Układ z „S” – zadaniem prędkości w stanach rozruchu i hamowania posiada
minimalne oscylacje prędkości taśmy przenośnika. Jednakże w układzie mogą wystąpić
pulsacje momentu elektromagnetycznego z amplitudą przekraczającą wartości dopuszczalne
(m = 2,2) i w układzie konieczne jest sprzężenie prądowe ograniczające zadane
przyspieszenie 0.
5. Przebiegi przejściowe w układzie dwumasowym zarówno liniowym jak i pełnym
pozwalają przeprowadzić pełną analizę drgań w układzie napędu taśmociągu w zależności
od parametrów silnika oraz parametrów samego taśmociągu (współczynniki c i t). Dla
uproszczonej analizy wystarczające jest badanie układu liniowego, co znacznie skraca czas
obliczeń.
LITERATURA
[1] BORCOV Y.A., SOKOLOVSKIJ G.G., Tiristornye sistemy elektroprivoda s uprugimi svjaziami,
Leningrad, Energija, 1979.
[2] FIRAGO B., PAVLAČYK L., Sravnitelnyj analiz svojstv asinchronnogo dvigatela pri skalarnom
častotnom upravlenii so stabilizaciej potokosceplenija i ograničeniem toka statora, Proc. 4th Inst. Conf.
on Unconventional Electromechanical and Electrical System, St. Petersburg, Russia, 1999, pp. 1321–
1326.
[3] KLUCEV V.I., Teorija elektroprivoda, Moskva, Energoizdat, 1985.
[4] KRAVCIK A.,E., SLAF M.M., AFONIN V.I., Asinchronnye dvigateli serii 4A: Spravočnik, Moskva,
Energoizdat, 1982.
[5] SIPAJLOV G.A., LOOS A.V., Matematičeskoe modelirowanie električeskich mašin, Moskva, Wysšaja
Škola, 1980.
[6] The Journal of Industrial Power Transmission, Motors and Elektronic Control, Drives and Controls,
U.K. March, May 1999.
TRANSIENT ELECTROMECHANICAL PROCESSES IN DRIVE SYSTEM WITH
ASYNCHRONOUS MOTOR AND SCALAR FREQUENCY CONTROL
140
The operation of an electric AC drive system with an asynchronous squirrel – cage motor and scalar
frequency control was analyzed. The character of the electromechanical processes in a single-mass system
for linear and nonlinear (having the shape of the „S” characteeristic) angular velocity was determined. The
properties of the single-mass system were compared with those of a two-mass system with an elastic
element. Simulation tests of the drive system were carried out for a 160 kW belt connveyor.