")
MECHANIKA NIEBA
WYKŁAD 14
23.06.2008 r
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
www.asc.rssi.ru
sajri.astronomy.cz
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
Warunek stabilności punktów L4 i L5 :
27 621
2
0.0385
54
Jest spełniony w Układzie Słonecznym dla wszystkich par Słońce-planeta i
planeta-księżyc, poza parą Pluton-Charon (ale Pluton już nie jest planetą)
W 1906 r. został odkryty pierwszy obiekt poruszający się wokół L4 układu
Jowisz-Słońce – (588) Achilles
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
(3753) Cruithne – pierwszy
obiekt poruszający się wokół
punktu równowagi układu
Ziemia-Słońce
Księżyce Kordylewskiego?
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
Symulacje stabilności obiektów wokół
punktów równowagi układu Słońce-Ziemia
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
W tym wypadku mamy:
r1 r2 1
1
x 2
2
3
y
2
skąd:
U xx 3 / 4
U yy 9 / 4
U xy 3 31 2 2 / 4
Równanie charakterystyczne przyjmuje postać:
4 2
27
2 1 2 0
4
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
Wybraliśmy układ jednostek, w którym ruch średni
masy μ2 jest jednostkowy, a okres orbitalny = 2π
Ruch cząstki jest złożeniem dwóch ruchów:
- krótkookresowego, okres= 2π/|λ1,2| jest zbliżony
do okresu orbitalnego masy μ2
- libracyjnego wokół punktu równowagi,
okres= 2π/|λ3,4|
Amplitudy tych ruchów zależą od stałych αj, βj,
które zależą od warunków początkowych
Ruch wypadkowy można traktować jako złożenie
długookresowego ruchu epicentrum wokół L4 i
krótkookresowego ruchu wokół epicentrum
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
Przykład:
2 0.01, x 0 0.49, y 0 3 / 2
0 Y
0 0
X 0 Y0 10 5 ,
X
odpowiednie wartości własne są równe:
2.90 2.32i
Wtedy rozwiązanie ma postać:
Xt 3.45 105 cos 0.268t 2.45 105 cos 0.963t
3.07 10 4 sin 0.268t 8.55 10 5 sin 0.963t
Yt 5.20 10 5 cos 0.268t 4.20 10 5 cos 0.963t
1.76 10 4 sin 0.268t 4.90 10 5 sin 0.963t
Ograniczone zagadnienie 3 ciał
Ruch w otoczeniu L4 i L5
Ze względu na nachylenie orbity w stosunku do
osi łączącej masy, można dokonać uproszczenia
zagadnienia przez obrót układu współrzędnych
o 30:
X' t cos 30
Y' t sin 30
sin 30 Xt
cos 30 Yt
Wtedy X(t) i Y(t) z przykładu przyjmują wartości:
X' t 3.54 10 4 sin 0.268t 9.85 10 5 sin 0.963t
Y' t 6.23 10 5 cos 0.268t 4.86 10 5 cos 0.963t
Są to dwa ruchy po elipsie. Ruch przypomina
wcześniej analizowane przybliżenie „guiding
center”
Ograniczone zagadnienie 3 ciał
Orbity typu kijanki (tadpole)
sajri.astronomy.cz
Ograniczone zagadnienie 3 ciał
Orbity typu kijanki (tadpole)
x x 0 0.0065
y y 0 0.0065
x y 0
x 0 1 2 2
y0 3 2
x x 0 0.008
y y 0 0.008
x y 0
μ2=0.001 – podobnie jak w przypadku układu Słońce-Jowisz
Na prawym wykresie ruch cząstki rozpoczął się nieco dalej od punktu równowagi
Co się stanie jeżeli ruch rozpocznie się jeszcze dalej?
Ograniczone zagadnienie 3 ciał
Orbity typu podkowy (horseshoe)
x 0.97668
y x 0
y 0.06118
2 0.000953875
x 1.02745
y x 0
y 0.04032
Kąt jaki zakreśla cząstka może osiągnąć wartości dużo większe od 180
Ograniczone zagadnienie 3 ciał
Orbity typu podkowy (horseshoe)
Ograniczone zagadnienie 3 ciał
Orbity typu kijanki (tadpole)
Janus
Prometeusz
Copyright by Calvin J. Hamilton
Ograniczone zagadnienie 3 ciał
Orbity typu podkowy (horseshoe)
planetoida 2002 AA29
porusza się po orbicie
typu podkowy w układzie
Ziemia-Słońce
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Orbity typu podkowy (horseshoe)
planetoida 2002 AA29
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Orbity typu podkowy (horseshoe)
3753 Cruithine
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Quasi - księżyce
Tego rodzaju obiekty mogą zajmować
stabilne orbity przez cały czas życia
Układu Słonecznego
Preferowane są dalsze planety –
quasi-księżyce znaleziono w przypadku
Urana i Neptuna
Copyright by Paul Wiegert
Ograniczone zagadnienie 3 ciał
Równania Hilla
Ruch cząstki wokół centralnej masy jest przez
większość czasu keplerowski. Perturbacje
pojawiają się jedynie przy bliskim spotkaniu z
drugą masą.
Przykładem takiego ruchu są orbity typu podkowy
i kijanki.
Poza rozwiązywaniem pełnych równań ruchu warto
zbadać ruch wokół mniejszej masy.
Podstawy tego zagadnienia sformułował Hill (1878)
Ograniczone zagadnienie 3 ciał
Równania Hilla
Jeżeli różnica mas jest duża możemy przyjąć,
że μ1≈1, wtedy równania ruchu płaskiego:
xx
x
x 2ny n 2 x 1 3 2 2 3 1
r1
r2
y 2nx n 2 y 31 32 y
r1 r2
przyjmują postać:
x
x 1
x 2 y x 3 2 3
r1
r2
y 2 x y
y
y
2 3
r13
r2
Ograniczone zagadnienie 3 ciał
Równania Hilla
W następnym kroku dokonujemy przesunięcia
początku układu współrzędnych tak, że x->1+x
i wprowadzamy Δ=r2.
Rozpatrujemy ruch w pobliżu masy m2 (tzn. w
okolicy punktów L1 i L2), więc x,y oraz Δ są
małymi wielkościami.
Rozwijając w szereg wyrażenie:
r12 x 2 y 2
2
i zaniedbując wyższe potęgi μ2, dostajemy:
r1 1 2 x
1/ 2
co pozwala przepisać równania ruchu w postaci:
Ograniczone zagadnienie 3 ciał
Równania Hilla
U H
x 2 y 3 32 x
x
U H
y 2 x 32 y
y
(14.1a)
(14.1b)
Są to tzw. równania Hilla, gdzie:
3
UH x2 2
2
2 x 2 y 2
a zmodyfikowana stała Jacobiego jest równa:
C H 3x 2 2
2
x 2 y 2
(14.2)
Ograniczone zagadnienie 3 ciał
Równania Hilla
Z równania 14.1a widzimy, że radialna składowa
siły znika kiedy 3Δ3=μ2.
To pozwala zdefiniować sferę Hilla jako sferę
o promieniu:
H 2
3
1/ 3
otaczającą drugą masę.
Analogiczny wynik był uzyskany w przypadku
wyznaczania położeń punktów L1 i L2
(wykład 13):
2
3
1
1/ 3
Ograniczone zagadnienie 3 ciał
Równania Hilla
Podstawiając w równaniach 14.1:
x y x y 0
x 0
możemy znaleźć położenie punktów L1 i L2.
Z równania 14.1a mamy:
L
1, 2
2
3
1/ 3
a z równania 14.2 dostajemy odpowiednią
zmodyfikowaną stałą Jacobiego:
C H 33 / 4 22 / 3
jeżeli zapiszemy:
krzywe zerowej prędkości
w otoczeniu punktów L1 i L2
C H 22 / 3
(14.3)
to orbity typu podkowy są możliwe w
obszarze, w którym ζ<34/3.
Ograniczone zagadnienie 3 ciał
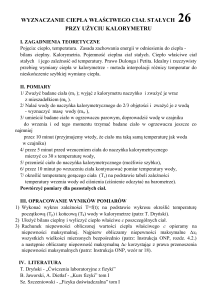
Równania Hilla
Użyjemy teraz kryterium Tisseranda do wyznaczenia zależności między elementami
orbitalnymi przed i po spotkaniu z satelitą.
Niech elementy orbitalne przed i po spotkaniu z satelitą będą równe odpowiednio:
a 1 1 a 1
e e1
a 2 1 a 2
e e 2
gdzie wszystkie wielkości oznaczone przez Δ są małe.
Z kryterium Tisseranda mamy:
1
a 1 e 2 cos I const
2a
1
1/ 2
1/ 2
21 a 1 e 2 const
1 a
co może być rozwinięte do postaci:
3 2
a e 2 const
4
lub:
3 2
3
a 1 e12 a 22 e 22
4
4
Ograniczone zagadnienie 3 ciał
Równania Hilla
Tą samą zależność można uzyskać z równań Hilla:
x 2 y 3 32 x
y 2 x
2
y
3
w przypadku dużych wartości Δ:
x 2y 3x
y 2x 0
(14.4)
co może być zapisane jako (przy użyciu 14.2 i 14.3):
x 2 y 2 3x 2 22 / 3
Używając teraz przybliżenia „guiding centre” możemy zapisać (n=1):
x a e sin t
x e cos t
wtedy z równań 14.4:
3
y a 2e sin t
2
y 2e cos t
x e sin t
Ograniczone zagadnienie 3 ciał
Równania Hilla
Uzyskane wyrażenia można użyć do przekształcenia równania:
x 2 y 2 3x 2 22 / 3
do postaci:
2
2
3
2
2
e cos t a 2e sin t 3a e sin t 22 / 3
2
z którego mamy:
3 2
a e 2 22 / 3
4
gdzie prawa strona jest stała.
Ograniczone zagadnienie 3 ciał
Równania Hilla
Równania Hilla skalują się z μ21/3. Jeśli podstawimy:
x x' 2
3
1/ 3
y y' 2
3
1/ 3
' 2
3
1/ 3
to równania ruchu 14.1 przyjmują postać:
1
x'2 y ' 3x ' 1 3
'
y'
y'2 x ' 3 3
'
Trajektorie cząstki otrzymane ze
skalowalnej postaci równań Hilla.
Masa perturbująca jest w początku
układu
Ograniczone zagadnienie 3 ciał
Księżyce „pasterskie”
www.astro.ljmu.ac.uk
www.universetoday.com
Ograniczone zagadnienie 3 ciał
Księżyce „pasterskie”
Copyright of Cassini Team
")