Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
1. PRZETWARZANIE A/C W SYSTEMACH
POMIAROWO-KONTROLNYCH
1.1. Struktura współczesnego toru pomiarowego
a)
Czujnik
Przetw. anal.
Linia transmisyjna
A/C
IF
μP
IF
μP
b)
Czujnik
Przetw.anal.
A/C
IF
Linia tr. + protok
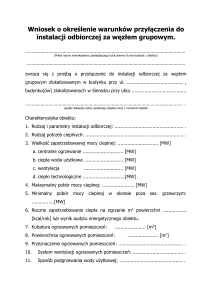
Rys.1.1. Struktura toru pomiarowego z transmisją analogową a) i transmisją cyfrową b)
Zadania elementów:
Czujnik
- przetworzenie wielkości mierzonej na sygnał elektryczny,
parametryczny, bądź czynny,
Przetwornik analogowy - przetworzenie postaci sygnału elektrycznego, skalowanie,
A/C
- przetwarzanie analogowo-cyfrowe,
Interfejs
- dopasowanie nośnika fizycznego i kodu sygnału,
μP
- urządzenie mikroprocesorowe (PC, logger, sterownik),
realizujące obróbkę (skalowanie do wartości wielkości
mierzonej, linearyzacja, korekcja, filtracja, analiza) i
inteligentną rejestrację danych.
Zaawansowany, współczesny tor pomiarowy zawiera część analogową i część cyfrową.
Położenie przetwornika A/C decyduje o analogowym bądź cyfrowym sposobie działania
głównej linii transmisyjnej (kablowej, światłowodowej, radiowej).
1.2. Cyfrowa technika pomiarowa – pojęcia podstawowe
1
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Właściwości:
Ostro zdefiniowany sygnał binarny,
Dobra niezawodność i wysoka odporność na zakłócenia,
Wyższa niż w technice analogowej rozdzielczość i na ogół lepsza dokładność,
Możliwość komunikacji z urządzeniami mikroprocesorowymi (m.in. typowymi i tanimi PCtami),
Wbudowana inteligencja, pozwalająca na daleko idącą interpretację uzyskiwanych
wyników, sterowanie procesem pomiarowym, samokontrolę sprawności i akwizycję
danych,
Możliwość kojarzenia w wysoko-sprawne sieci pomiarowo-informatyczne.
Sygnał binarny
Sygnały analogowe (ciągłe) – kontinuum wartości w określonym przedziale liczb
rzeczywistych, odcinek na osi liczbowej,
Sygnały ziarniste (dyskretne) – np. zdarzenia, il. Impulsów, stan (wysoki-niski, dobry zły),
dziedzina liczb naturalnych lub podzbiór l.n., punkty na osi liczbowej.
Sygnał binarny (dwustanowy, wysoki-niski, i td, np. TTL), „ostro” zdefiniowany, co
eliminuje niepewność co do kwalifikacji jego wartości.
Linia 1 – bitowa:
GND
Linia 3 – bitowa:
A1
Np.:
„1”
A2
„0”
A3
„1”
GND
Rys. 1.2. Łącze cyfrowe 1-o i 3-bitowe
101 – wartość słowa binarnego, w tym wypadku 3-bitowego.
Wartość liczby reprezentowanej słowem zależy od przyjętej konwencji – kodu.
Ilość odrębnych stanów wyrażanych słowem zależy od jego długości tj ilości bitów:
1 bit
- [0 1]
- 2 stany,
2
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
2 bity
- [00 01 10 11]
- 4 stany,
3 bity
- [000 001 010 100 011 110 101 111]
- 8 stanów
Ilość możliwych wartości słowa (różnych stanów):
gdzie: n – ilość bitów
Nmax = 2n
1.3. Przetwarzanie analogowo-cyfrowe i jego błędy
Wielkość cyfrowa N
Nmax
Z
Wielkość analogowa X
Rys. 1.3. Przetwarzanie analogowo-cyfrowe
Generalnie
Z istoty przetwarzania A/C wynika
N≠X
błąd kwantyzacji:
∆k = N - X
3
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
∆k
X
Rys. 1.4. Błąd kwantyzacji w zależności od wartości wielkości analogowej
Z rysunku 1.3 wynika:
∆k = ∆k(X)
zazwyczaj przyjmuje się:
∆k = |∆k(X)|max
Błąd kwantyzacji, przy równomiernym podziale zakresu Z:
Δk
Z
Z
n
N max 2
gdzie: Z – zakres, n – ilość bitów słowa binarnego
Względny zakresowy błąd kwantyzacji:
k
k
1
n
Z
2
Przykład:
W torze pomiaru temperatury zastosowano czujnik Pt100 i przetwornik elektroniczny
analogowy o zakresach 0-100 °C/4-20 mA. Za pośrednictwem rezystora 250 Ω sygnał
został podany na wejście 12-bitowej komputerowej karty pomiarowej o zakresie 0-5 V.
Jaki jest bezwzględny i względny zakresowy błąd pomiaru temperatury, wynikający z
kwantyzacji?
1.4. Kody binarne
4
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Naturalny kod dwójkowy
N a1 2 1 a 2 2 2
an 2
n
gdzie: ai – liczby binarne, 2i – wagi bitów,
N 0;1
N min 0,
2-1 - MSB,
2-n – LSB
N max 1 2 n 1 LSB
możliwość określenia liczby z dokładnością do LSB:
n
=
4
ilość stanów
Nmax =0,9375
16
6
0,9843...
64
8
0,996...
256
12
0,99975...
4096
Kod dwójkowo-dziesiętny (BCD)
Tetrady w kodzie 8-4-2-1:
(8 4 2 1)
(8 4 2 1)
(8 4 2 1)
1001
0110
0011
9 x 100
+
6 x 10
+
3x1
Ogólnie:
N ( a 3 2 3 a 2 2 2 a1 21 a 0 2 0 ) 10 2
(b3 2 3 b2 2 2 b1 21 b0 2 0 ) 101
c3 2 3 c2 2 2 c1 21 c0 2 0 10 0
Kod heksagonalny
Dla pełnego wykorzystania zaangażowanego sprzętu rozwinięto kod BCD w kod 16kowy (heksagonalny) operujący cyframi:
0 1 2 3 4 5 6 7 8 9 A B C D E F.
1.5. Systemy transmisji sygnału cyfrowego
5
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Szeregowy (bit po bicie)
Konieczność ustalenia szybkości transmisji, która odbywa się synchronicznie po
stronie nadawania i odbioru, także formatu słowa (bity startu, stopu, znaczące, kontrola
parzystości), protokołu zapewniającego właściwą bezkonfliktową kolejność nadawania i
odbioru. Np. RS 232: linia kompletna 9 – przewodowa, najczęściej wystarcza 3przewodowa, zasięg do 15 m, dla transmisji prądowej do 300 m, maksymalna szybkość
do 20 kbajtów/s, możliwość separacji galwanicznej.
Równoległy (bajt po bajcie, np. Centronics, IEEE- 488)
16 – bitowa magistrala: 8-bitów – szyna danych, 3-bity synchronizacja, 5-bitów
sterowanie transmisji. Zasięg do 4 m, szybkość do 0,5 Mbajt/s
1.6. Algorytmy przetwarzania analogowo-cyfrowego
Przetwornik kompensacyjny
Ux
K
C/A
DEKODER
UKL. STERUJ.
ZEGAR
Rys. 1.5. Schemat funkcjonalny kompensacyjnego przetwornika A/C
Ux, Ur
6
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Ur
Ux
1
1
1
1
1
Rys. 1.6. Przebieg cyklu pomiarowego w kompensacyjnym przetworniku A/C
z podziałem równomiernym
Cykl pomiarowy kończy się w momencie osiągnięcia kompensacji. Miarą napięcia jest
osiągnięta ilość przyrostów napięcia referencyjnego. Wartość zmierzona odpowiada chwilowej
wartości napięcia, w bliżej nieokreślonym momencie czasu.
Ux, Ur
Ux
Ur
1
1
0
1
0
Rys. 1.7. Przebieg cyklu pomiarowego w kompensacyjnym przetworniku A/C
z podziałem wagowym
Cykl pomiarowy kończy się po wyznaczeniu wartości wszystkich bitów słowa
binarnego, co następuje ok. 100 szybciej niż w przypadku podziału równomiernego.
Dokładność przetworników kompensacyjnych sięgać może nawet 0,001 %!
Źródła błędów: - błąd kwantyzacji, - błędy napięć kompensacyjnych (niedokładności sieci
rezystorowej, napięć wzorcowych), - błąd nieczułości komparatora, niestałość napięcia mierzonego.
7
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Przetwornik bezpośredni równoległy
Ux
Uwz
K1
D
E
K
O
D
E
R
Kn
Rys.1.8. Schemat funkcjonalny bezpośredniego równoległego przetwornika A/C
Najszybszy, ilość bitów ograniczona, komplikacja układowa (ilość komparatorów), kosztowny.
Przetwornik podwójnie całkujący
INTEGRATOR
Ux
U'
K
- Uz
UK. STER.
GZ
LICZNIK
Wy
Rys. 1.9. Schemat funkcjonalny przetwornika A/C z podwójnym całkowaniem
Ui
8
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
0
Rys. 1.10.
TL
TR
Nmax 0
N
t
Przebieg napięcia na wyjściu integratora i impulsy zliczane przez licznik
tL – moment czasu zapełnienia licznika (Nmax),
tR – moment czasu gdy napięcie integratora osiąga 0, a licznik wartość N
Przyrost napięcia integratora w czasie jego ładowania jest równy przyrostowi w czasie
rozładowywania:
U i t L U i t R t L 0
tL
U
tR
x
dt U w dt 0
0
tL
tL
U
x
dt t R t L U w
0
t t
1 L
U x R L U w
tL 0
tL
t
U x ,sr
N Tz
N
Uw
Uw
N max Tz
N max
Pomiar tą metodą dotyczy wartości średniej za okres pierwszego całkowania
(Nmax*Tz), który jest parametrem konstrukcyjnym przetwornika. Jeżeli ten okres jest całkowitą
krotnością okresu zakłócenia okresowego (o zerowej wartości średniej, np. harmonicznego) –
uzyskuje się skuteczną filtrację tego zakłócenia (np. zakłóceń od sieci energetycznej 50 Hz).
9
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Źródła błędów (typowo 0,05%):
-
błąd kwantyzacji,
-
niedokładność Uw,
-
błąd liniowości integratora.
1.7. System z centralnym przetwarzaniem A/C
– komputerowa karta pomiarowa
JC
A/C
LP1
(A/A)
LPn
(A/A)
LP2
(A/A)
LP3
(A/A)
Rys. 1.11. Gwiazdowa struktura systemu z centralnym przetwarzaniem A/C
JC
– jednostka centralna, PC, sterownik, rejestrator cyfrowy,
A/C
– zespół przetwarzania A/C (komputerowa karta pomiarowa,
sterownikowe urządzenia wejść analogowych),
LP
– lokalne przetworniki analogowe.
Gwiazdowa topologia systemu, przy transmisji analogowej na większe odległości
stwarza trudności w zachowaniu wymaganej dokładności i odporności na zakłócenia. Przy
znacznej ilości kanałów poważne stają się problemy z niezawodnością systemu. Struktura
wygodna w warunkach systemów skupionych terytorialnie, niezbyt rozbudowanych. Chętnie
stosowana przy modernizacji systemów oryginalnie analogowych.
10
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Przy wykorzystaniu typowego PC, niezbędne wyposażenie go w zespół urządzeń
wejściowo-wyjściowych, zorganizowanych w postaci t.zw. karty pomiarowej. Obsługują one
szereg wejść analogowych, wejść binarnych, a także licznikowych. Pozwalają także na
komunikację w kierunku od komputera, poprzez wyjścia analogowe i binarne.
M
A
G
I
S
T
R
A
L
A
UKŁAD STERUJĄCY
RAM
MUX
IF
A/C
S/H
Rys. 1.12. Schemat przetwarzania sygnałów analogowych w karcie pomiarowej
Bloki przetwarzające analogowe sygnały wejściowe:
MUX
- multiplekser, przełącznik elektroniczny,
Wzmacniacz o programowo sterowanym wzmocnieniu,
S/H
- (sample/hold) przetwornik próbkująco-pamiętający,
A/C
- przetwornik analogowo-cyfrowy,
IF
- interfejs dla dopasowania sygnału do standardu magistrali.
Układ sterujący, nadzoruje ilość przełączanych kanałów, szybkość i porządek ich
przełączania, dobór wzmocnienia do zapamiętanych wymagań kanału, moment pobrania
próbki, moment załączenia cyklu przetwarzania A/C. Sposób pracy karty odtwarzany jest z
pamięci RAM, która wymaga uprzedniego wczytania parametrów konfiguracyjnych. Niezbędne
także jest sterowanie startem i zatrzymaniem procesu akwizycji danych. Dla tych celów
wykorzystuje się niezbędne oprogramowanie narzędziowe, pośredniczące w komunikacji
pomiędzy kartą i operatorem.
11
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Rys. 1.13. Przykładowy schemat blokowy karty pomiarowej
1.8. Systemy z lokalnym przetwarzaniem A/C
12
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
PC
PL1 (A/C)
PL2 (A/C)
PLn (A/C)
IF
IF
IF
IF
Rys. 1.14. Magistralowa struktura systemu z lokalnym przetwarzaniem A/C
Pl – lokalne przetworniki A/C z interfejsem IF,
JC – jednostka centralna (komputer bądź sterownik)
Transmisja uwarunkowana fizycznymi parametrami linii i protokołem transmisji.
Rys.1.15. Schemat blokowy przykładowego przetwornika z lokalnym przetwarzaniem A/C
2. POMIARY ENERGII CIEPLNEJ
2.1. Podstawy metody pomiarowej
13
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Q’z(qz)
ODBIORNIK
Q’
Q’p(qp)
Rys. 2.1. Bilans mocy cieplnej odbiornika
Moc cieplna przekazywana w powyższym systemie jest różnicą mocy doprowadzonej
przez czynnik na zasilaniu i mocy odprowadzonej na powrocie:
dQ dQ z dQ p
dt
dt
dt
dm
dm
c z z
c p p
dt
dt
dm
c sr z p
dt
gdzie przyjmuje się:
sr
z p
2
14
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Wodomierz mierzy objętościowe natężenie przepływu, które jest proporcjonalne do
masowego poprzez gęstość, zależną od temperatury czynnika przepływającego przez
wodomierz:
dm dV
w
dt
dt
Algorytm obliczenia oddanej mocy cieplnej przyjmuje ostatecznie postać:
dQ dV
(w ) csr z p
dt
dt
gdzie, w zależności od miejsca instalacji wodomierza:
w z
lub:
w p
Moc cieplna daje się wyznaczyć na drodze pomiaru pośredniego, w którym niezbędne
obliczenia przeprowadza mikroprocesor. Pomiarowi bezpośredniemu podlegają zwykle 3
wielkości:
-
objętość przepływu,
-
temperatury czynnika na zasilaniu i powrocie.
Moc obliczana jest w ciepłomierzu, w oparciu o algorytm, określony powyżej zapisaną
zależnością. Do obliczeń korzysta się ze stabelaryzowanych wartości parametrów czynnika,
pozwalających wyznaczyć:
-
gęstość, dla temperatury czynnika w wodomierzu,
-
ciepło właściwe, dla temperatury średniej.
Wymagania GUM:
Δq
3...150 C
Dokładność przelicznika:
3 – 20 C
± 1.5%
>20 C
± 0,75%
15
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
2.2.
Struktura ciepłomierza mikroprocesorowego
i algorytmy obliczeniowe
n(V)
LICZN
EPROM
DISP
mP
IF
R(qz)
R/U
A/C
PC
R(qp)
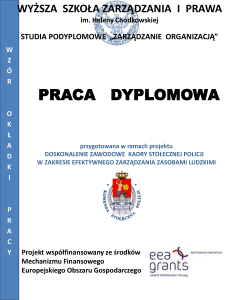
Rys. 2.2. Schemat funkcjonalny ciepłomierza mikroprocesorowego
LICZN
- licznik impulsów generowanych przez wodomierz,
EPROM
- pamięć programowalna ciepłomierza,
DISP
- wyświetlacz,
R/U
- przetwornik rezystancja-napięcie,
A/C
- przetwornik analogowo-cyfrowy,
mP
- mikroprocesor,
IF
- interfejs dla komunikacji z zewnętrznym komputerem
V
Licznik imp.
N
N*kv=V
(ΔV)/T=V'
kv
T
w
V'
V'*ρ(q w )*c(q sr)*(Δq )=Q'
ρ(q w )
c(q sr)
Q'
Całka(Q'dt)=Q
Q
qw
Δq
(q 1+q 2 )/2=q sr
q 1-q 2 =Δq
R/U 1
L1
A/C
R/U 2
L1*kq =q
q1
kq
L2
L2*kq =q 2
q2
EPROM: Adres sieciowy, tablica r ( q ) , tablica c(q ), stała wodomierza kv,
miejsce instalacji wodomierza, czas uśredniania T.
Rys. 2.3. Algorytmy obliczeniowe w ciepłomierzu
16
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
3. WIRTUALNA REALIZACJA REGULATORÓW
3.1. Struktura systemu regulacji automatycznej
a)
z
z
x
y
EL. WYKON.
OBIEKT
z
-
r
b)
REGULATOR
EL. WYKON.
e
+
w
OBIEKT
U.P.
KARTA POMIAROWA
REG. WIRT.
PC + OPROGRAMOWANIE
Rys. 3.1. System regulacji automatycznej
a) schemat ideowy,
b) realizacja z regulatorem wirtualnym
3.2. Model obiektu regulacji
17
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
x(t)
y(t)
Rys.3.2. Sygnały w obiekcie regulacji
Związek pomiędzy sygnałem wyjściowym i wejściowym określa ogólny model w
postaci równania różniczkowego:
dny
d mx
an n ............... a0 y bm m ................. b0 x
dt
dx
nm
gdzie:
Dla stanu ustalonego:
a0 y b0 x
charakterystyka statyczna
y Sx
gdzie: S
b0
- czułość statyczna
a0
Algebraizacja modelu o postaci równania różniczkowego, poprzez przejście do postaci
operatorowej:
a n Y ( s ) s n ........... a 0Y ( s ) bm X ( s ) s m ....... b0 X ( s )
Pozwala to na łatwe określenie transmitancji operatorowej, która dla dowolnego sygnału
określa stałe właściwości obiektu:
G( s)
Y ( s ) bm s m ....... b0
L( s )
n
X ( s ) a n s ....... a0 M ( s)
W powyższej transmitancji L(s) i M(s) są wielomianami ze względu na operator s, o
współczynnikach określonych wektorami, odpowiednio:
18
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
l bm bm 1 .........b0 ;
m a n a n 1 ........a 0 ;
Podanie obu wektorów jednoznacznie określa obiekt i taka forma jest stosowana w syntaktyce
pakietów obliczeniowych typu Matlab.
PRZYKŁAD:
Wektory współczynników transmitancji są następujące:
l 1;
m 1 1;
określają one obiekt I rzędu, z wyłącznie wolnym wyrazem w liczniku, o stałej czasowej
równej 1 i wzmocnieniu statycznym równym 1.
Właściwości obiektu determinuje sposób jego odpowiedzi na typowe sygnały
wymuszające: najczęściej skok jednostkowy i sygnał harmoniczny. Dla przykładowego obiektu
I rzędu, odpowiedź skokowa w dziedzinie czasu, obliczona analitycznie wyraża się jako:
h (t ) 1 e
t
T
gdzie: T – oznacza stałą czasową
Wykres odpowiedzi skokowej może być łatwo uzyskany w programie Matlab, w efekcie
polecenia step(l,m).
19
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Rys. 3.3. Wykres odpowiedzi skokowej przykładowego obiektu I rzędu, otrzymany w Matlabie
w efekcie polecenia step(l,m)
Sposób reakcji obiektu na sygnały okresowe określają jego charakterystyki:
amplitudowo - częstotliwościowa i fazowo-częstotliwościowa. Pierwsza z nich ma fizyczny
sens zależności współczynnika wzmocnienia amplitudy sygnału harmonicznego od
częstotliwości tego sygnału. Dla przykładowego obiektu, analitycznie wyraża się ona
następująco:
Ymax
1
X max
1 T 2 2
gdzie: Ym Xm - amplitudy harmonicznego sygnału na wyjściu i wejściu,
T
- stała czasowa obiektu,
ω
- pulsacja sygnału (ω=2πf).
20
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Wykresy obu charakterystyk częstotliwościowych (amplitudowej i fazowej) otrzymać
można w Matlabie, dla zadanej transmitancji obiektu, poprzez proste wywołanie instrukcji
bode(l,m). Uzyskane dla przykładowego obiektu wykresy przedstawia poniższy rysunek.
Rys. 3.4. Charakterystyki częstotliwościowe otrzymane w efekcie polecenia bode(l,m), dla
przykładowego obiektu I rzędu
W praktyce automatyki, dla wielu obiektów, mimo nieraz znacznej komplikacji ich
struktury, wystarczająca okazuje się często aproksymacja prostym modelem zastępczym,
złożonym z elementu inercyjnego I rzędu i elementu opóźniającego. Dobór modelu sprowadza
się wówczas do zoptymalizowania jego trzech parametrów, względem przyjętego kryterium.
k/(Ts+1)
τ
Rys. 3.5. Prosty model zastępczy typowego obiektu regulacji:
transmitancja I rzędu o stałej czasowej T i opóźnienie τ
21
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Właściwości obiektu o modelu zastępczym przedstawionym powyżej, łatwo można
badać i dobierać przy wykorzystaniu pakietu symulacyjnego Matlab-Simulink.
a)
1
s+1
Step
Transfer Fcn
Transport
Delay
Scope
b)
1
s+1
Sine Wave
Transfer Fcn
Transport
Delay
Scope
Step
Rys. 3.6.Prosta struktura dla badania obiektu inercyjnego z opóźnieniem
w programie Simulink: a) wymuszenie skokowe, b) wymuszenie skokiem z nałożoną
składową harmoniczną
Czas opóźnienia w istotny sposób wpływa na właściwości obiektu i wynikające stąd
wymagania, dotyczące sterowania i wyboru rodzaju regulatora. Zadowalającą jakość
sterowania uzyskać można dobierając:
dla
t/T < 0,2
regulatory dwustawne,
t/T < 1
regulatory ciągłe,
1
<
t/T
regulatory impulsowe
22
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
3.3. System z regulatorem dwustawnym
PRZYKŁAD:
termostat laboratoryjny z termometrem kontaktowym
G
TK
M
Rys. 3..7. Schemat termostatu laboratoryjnego
G – grzałka, TK – termometr kontaktowy, M - mieszadło
Termometr kontaktowy pełni funkcje zadajnika, węzła sumującego i regulatora
dwustawnego.
1
0
h
e
Rys. 3.8. Charakterystyka statyczna regulatora dwustawnego z histerezą
23
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
y
1
ymax
y0+h/2
y0
Dy
ymin
y0-h/2
tau
tau
tg
ts
0
0,00
1,00
2,00
3,00
4,00
5,00
t
Rys. 3.9. Przebieg wyjściowy - y i wejściowy - P obiektu inercyjnego pierwszego rzędu
z opóźnieniem, w systemie automatyki z regulatorem dwustawnym
Przebieg temperatury w trakcie nagrzewania odpowiada funkcji:
y g (t ) 1 e
t
Tg
Przebieg temperatury w trakcie stygnięcia odpowiada funkcji:
y s (t ) e
t
Ts
Błąd regulacji wyznaczyć można z okresowego przebiegu naprzemian nagrzewania i
stygnięcia, przy założeniu równych stałych czasowych Ts Tg T . Międzyszczytowa
wartość błędu regulacji definiowana może być jako:
y ymax ymin
24
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Wartość maksymalna temperatury:
y max y g (t1 ) 1 e
y g (t1 ) 1 e
t1
T
y0
t1
T
1 e
t1
T
h
2
e
T
oraz
zatem
ymax
h
1 1 y0 e T
2
Wartość minimalna temperatury:
ymin y s (t2 ) e
y s ( t2 ) e
t2
T
y0
t2
T
e
t2
T
e
T
h
2
oraz
zatem
y min
h
yo e T
2
W rezultacie wartość międzyszczytowa błędu regulacji:
h
h
y 1 1 y0 e T yo e T 1 1 h e T
2
2
Np. dla h=0,01 Δy=2h już dla τ/T=0,01, zaś już dla τ/T=0,2 Δy osiąga wartość aż 0,63!
WNIOSEK:
Wpływ czasu opóźnienia na błędy regulacji jest czynnikiem ograniczającym
możliwości skutecznego stosowania regulatora dwustawnego.
Dla osiągnięcia zadowalającej jakości regulacji w termostacie laboratoryjnym
celowe jest zainstalowanie mieszadła.
25
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Średni błąd regulacji definiuje się jako różnicę pomiędzy nastawą a wartością
średnią przebiegu regulowanego:
y0 y y0
y max y min
2
Korzystając z poprzednio wyprowadzonych zależności otrzymuje się:
h
h
1 1 y0 e T y0 e T
1
2
2
y0
y0 1 e T
2
2
WNIOSKI:
Średni błąd regulacji nie występuje przy braku opóźnienia i silnie rośnie wraz z
opóźnieniem niezerowym,
Błąd ten ponadto monotonicznie zależy od wartości nastawy, osiągając zero dla
nastawy równej połowie zakresu (ograniczonego wartością zerową i rzędną
asymptoty).
Symulacyjne badania systemu sterowania można wygodnie przeprowadzać w
programie Matlab-Simulink.
Moc
1
Step Input
3s+1
Switch
Transfer Fcn
Transport
Delay
Relay
Wyjscie
Sum
0.5
Nastawa
Blad
Rys. 3.10. Przykładowa struktura symulacyjnego modelu
dla badania systemu z regulatorem dwustawnym w programie Matlab-Simulink
3.4. Systemy z regulatorami ciągłymi PID
26
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
W literaturze regulatorom PID przypisuje się strukturę szeregowo-równoległą
bądź równoległą, dla nich odpowiednio definiowane są parametry regulatora.
1/Ti*s
a)
e
r
k
Td*s
b)
I/s
e
r
P
D*s
Rys. 3.11. Szeregowo-równoległa a) i równoległa b) struktura regulatorów PID
Sygnał wyjściowy z regulatora wyraża się w zależności od jego struktury:
dla struktury szeregowo-równoległej:
1
r( s) k 1
Td s e( s)
Ti s
dla struktury równoległej:
I
r ( s ) P D s e( s )
s
Z powyższych wynikają oczywiste zależności pomiędzy współczynnikami dla obu konfiguracji:
Pk
I
k
Ti
D k Td
27
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Regulatory często wykonywane jako uniwersalne, w których strukturę (P, PI, PID) i
dostrojenie ustala się poprzez dobór parametrów. Np. wybór D=0 określa strukturę PI.
Sens fizyczny parametrów: czas zdwojenia TI i czas wyprzedzenia Td wyjaśniają
przebiegi odpowiedzi regulatora PI na skok jednostkowy i odpowiedzi regulatora PD na skok
prędkości, przedstawione na rysunku 30.
a)
b)
r(t)
r(t)
2k
k
Ti
t
Td
t
Rys. 3.12. Odpowiedzi: a) regulatora PI na skok, b) regulatora PD na skok prędkości
Sposób działania regulatora P wynika z równania węzła sumującego, co można prześledzić
na schemacie z rysunku 3.13.
y
KoG(s)
e
P
e
+
yo
Rys. 3.13. Uproszczony schemat blokowy systemu z regulatorem P
W węźle sumującym zawsze spełniona jest suma:
e(t ) y0 (t ) y (t )
28
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Dla stanu ustalonego obowiązuje zatem:
oraz:
est yo yst
est P K o y st
skąd:
est
y st
K
K K0 P
gdzie:
– wzmocnienie statyczne pętli.
Odpowiedź ustalona systemu wyraża się więc:
y st
gdzie oczywiście:
oraz:
K
yo
K 1
K
1
K 1
1
est yo
K 1
WNIOSKI:
Regulator P nie jest zdolny wyeliminować błędu statycznego, który jest tym
mniejszy im większe jest wzmocnienie statyczne w pętli sprzężenia zwrotnego.
Wzmocnienia nie można zwiększać nieograniczenie ze względu na nadrzędne
wymagania stabilności.
Dodanie akcji całkującej prowadzi do eliminacji błędu statycznego.
Dodanie akcji różniczkującej pozwala na uprzedzające reagowanie zależne od
pojawiającej się tendencji zmian.
29
POLITECHNIKA KRAKOWSKA, 1 Instytut Inżynierii Cieplnej i Ochrony Powietrza
s+1
K r a k ó w,Transport
2004 r
Wyjscie
Transfer Fcn1
Delay
PID Controller1
PID
Sum1
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Rys. 3.14. Przykładowa struktura symulacyjnego modelu
dla badania systemu z regulatorem PID w programie Matlab-Simulink
4. TECHNICZNE POMIARY TEMPERATURY
30
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
4.1. Systematyka termometrów
TERMOMETRY
Stykowe
Bezstykow
e
Nieelektryczn
e
Elektryczne
Rozszerzalnościow
e
Ciśnieniow
e
C. stałe
Ciecz
ee
Dylatac
.
Rtęciowe
Bimetal
.
Parowe
Rezystancyjn
e
Termoelektr.
Gazow
e
Pt
Metalow
e
Cu
Ni
Termistorow
e
NTC
PTC
Alkohol.
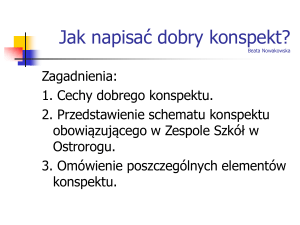
Rys. 4.1. Rodzaje termometrów
4.2. Czujniki termorezystancyjne
4.2.1. Materiały termorezystancyjne
Metal
Pt platyna
Zakres [°C]
-200 +850
(-250 +1000)
Czułość R100/R0
Klasa
1,385
1; 2; 3
Cu miedź
-50 +150
1,426
2; 3
Ni nikiel
-60 +150
1,617
3
Rezystancja termorezystora platynowego jest aproksymowana zależnie od zakresu
31
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Rt R0 1 A t B t 2 C t 100 t 3 w zakresie t -200 do 0 °C
Rt R 0 1 A t B t 2
0 - 850 °C
Przyjęcie uproszczonej aproksymacji liniowej, tj. zaniedbanie wyrazu kwadratowego,
powoduje w zakresie 0 – 100 °C błąd o wartosci ≤ 0,36 °C.
Typowe realizacje termorezystorów: Pt100, Pt1000.
4.2.2. Konstrukcja czujnika
wkład termorezystancyjny,
osłona;
ochrona przed działaniem środowiska (ciśnienie, aktywność chemiczna,
drgania, narażenia mechaniczne),
głowica:
ochrona zacisków (mechaniczna i izotermiczna)
ochrona przetwornika elektronicznego,
polączenia wewnętrzne,
płaszcz,
dodatkowa ochrona dla ciężkich warunków przemysłowych.
½Rp
½Rp
RPt
Rys. 4.2. Wewnętrzny obwód rezystancyjnego czujnika temperatury
Rp – rezystancja połączeń termorezystora z zaciskami w głowicy, niezależna od temperatury
RPt – rezystancja termorezystora.
4.2.3. Układ pomiaru rezystancji
32
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
specjalny mostkowy układ laboratoryjny
czterogałęźny mostek Wheatstone’a.
(Δ<0,001 °C !! )
Rx
U0 f R x
Uz
Rys. 4.3. Ogólny układ mostka Wheatstone’a
R Pt
Rk
Rk
U0 f RPt 2Rk
Uz
Rys.4.4
2-przewodowe przyłączenie czujnika
(pomiar temperatury wrażliwy na rezystancję zewnętrznych połączeń czujnika Rk
i jej zależność od temperatury otoczenia)
a)
b)
33
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
R Pt
Rk
R Pt
Rk
Rk
U0 f RPt
Uz
Rys. 4.5. Przyłączenie czujnika umniezależniające pomiar temperatury od rezystancji zewnętrznych
przewodów łączących : a) 3-przewodowe, b) 4-przewodowe
U f RPt
R/U
Rejestr
ator
R Pt
Uz
V1
V2
Rys. 4.6. Tor pomiaru temperatury z przetwornikiem elektronicznym o wyjściu napięciowym
I f RPt
mA1
R/I
mA2
Rejestr
ator
R Pt
Uz
Rys. 4.7. Tor pomiaru temperatury z przetwornikiem elektronicznym o wyjściu prądowym z 4przewodowym przyłączeniem przetwornika
34
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
I S min
I max
S
min
I max I min
max min
max
Rys. 4.8. Typowa charakterystyka przetwornika elektronicznego R/I,
o wyjściu w standardzie: I 0;20mA
I f RPt
mA1 mA2
R/I
Uz
R Pt
Rejestr
ator
Rys. 4.9. Przetwornik R/I z wyjściem w układzie 2-przewodowym,
w standardzie I 4;20mA
I S min I min
Imax
Imin
min
max
Rys 4.10. Typowa charakterystyka przetwornika elektronicznego R/I,
o wyjściu w standardzie I 4;20mA
Źródła błędów w pomiarach temperatury z użyciem przetworników termorezystancyjnych:
35
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
błąd wzorcowania (błąd wzorca + błąd metody wzorcowania),
błąd pomiaru rezystancji,
błąd aproksymacji,
błąd od wielkości wpływowych (STE, naprężenia, pola EM),
różnica temperatury termometru i temperatury mierzonej (gradienty temperatury
spowodowane
przepływem
ciepła
przez
termometr,
także
podgrzewanie
termorezystora prądem pomiarowym),
błędy dynamiczne.
4.3. Termometry termoelektryczne
4.3.1. Zjawisko termoelektryczne
nA ,VA
A
nA ,VA
B
T
Rys. 4.11.
Kontaktowa różnica potencjałów:
VAB VB VA
gdzie:
n
kT
ln A
e
nB
nA , nB - koncentracja swobodnych elektronów,
VA ,VB - praca wyjścia elektronu,
T
- temperatura złącza,
k
e
- stała Bolzmana,
- ładunek elektronu.
Dla pomiaru kontaktowej różnicy potencjałów niezbędne jest domknięcie obwodu elektrycznego,
co prowadzi do sytuacji, przedstawionej na rysunku 4.12.
3
36
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
A
C
1
B
2
T2 = T3 =To
T1 = T
Rys.4.12. Termoelement (A – B) w obwodzie do pomiaru siły termoelektrycznej
Wypadkowa siła termoelektryczna:
E VAB VBC VCA
VAB VB VA
n
kT
ln A
e
nB
VBC VC VB
kTo
n
ln B
e
nC
VCA VA VC
kTo
n
ln C
e
nA
n
n
nA
To ln B C
T ln
nB
nC n A
n
k
T To ln A
e
nB
E
k
e
Wnioski:
STE zależy od różnicy temperatur spoiny pomiarowej i spoin odniesienia (nie zaś
od samej T!),
Zależność jest nieliniowa,
Metal, którego końce znajdują się w tej samej temperaturze (To) nie wpływa na
STE, niezależnie od przebiegu temperatury pomiędzy końcami (t. zw. „prawo
trzeciego metalu”),
Dla pomiarów temperatury metodą termoelektryczną zasadnicze znaczenie ma
równość temperatury spoin odniesienia i jej wartość.
4.3.2. Czujniki termoelektryczne
37
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Wymagania dla doboru i konstrukcji termoelementów:
Czułość (metale odległe w szeregu termoelektrycznym),
Dostatecznie wysoka temperatura topnienia i dopuszczalna temperatura pracy
ciągłej,
Odporność na wpływy otoczenia,
Stabilność i powtarzalność właściwości,
Niska rezystywność,
Mała nieliniowość ch-ki (?).
Ważniejsze rodzaje termoelementów przedstawia tablica:
Zastosowanie
Rodzaj
Nazwa
Współczynnik czułości
dE/dT [μV/K]
w temperaturze [°C]:
0
300
800
10,9
Temperatura
dopuszczalna [°C]
Ciągła
Chwilowa
1300
1600
PtRh – Pt
Wzorcowy,
kontrolny,
użytkowy
(wys.temp)
R, S
5,6
9,1
Chromel-alumel
Uniwersalny
przemysłowy
K
39,5
41
40,5
200
1350
J
52
55,5
65
600
900
T
38,5
53,2
61,7
300
400
3.1.
Fe-konstantan
Cu-Konstantan
Do średnich
temperatur
Do niskich
temperatur
Konstrukcja czujników
Ochrona przed mechanicznymi i chemicznymi działaniami środowiska,
Izolacja elektryczna,
Mechaniczna i termiczna ochrona zacisków (izotermiczność).
Spoina pomiarowa izolowana
38
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Spoina pomiarowa nieizolowana
Rys. 4.13. Wersje wewnętrznych połączeń czujnika
4.3.3. Problem temperatury spoin odniesienia
Termostatyzacja
To = const
Rys. 4.14. Układ z termostatyzacją spoin odniesienia
To = 0 [˚C]
w laboratorium,
To = 50 [˚C]
w przemyśle
Korekcja elektroniczna
E
Ek=f(To)
To = var
Ton = 0, 20, 50 [˚C]
T
Rys. 4.15. Układ z korekcją wpływu temperatury spoin odniesienia
Skorygowana siła termoelektryczna wynosi:
39
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
E ET (T To ) Ek (To Ton )
gdzie: E – napięcie układu termoelement-korektor,
Ek – napięcie korekcyjne,
T – temperatura mierzona,
To – temperatura spoin odniesienia,
Ton – nominalna temperatura spoin odniesienia.
Przewody kompensacyjne dla doprowadzenia spoin do miejsca o kontrolowanej
temperaturze
przew. kompensacyjne
przew. miedziane
termoelement
Rys. 4.16. Termoelement w układzie z przewodami kompensacyjnymi
4.3.4. Układy pomiaru siły termoelektrycznej
Miliwoltomierz
i
mV
RT
Rv
T
To
Rys. 4.17. Pomiar siły termoelektrycznej za pomocą miliwoltomierza
Uwarunkowania:
40
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
~i
i
E
RT Rv
Rv (To ) const; RT (T ) var
w praktyce:
i f (E, R )
ogólnie:
zatem, dla uniezależnienia od zmian RT:
RT Rv oraz RT RTN wg PN: RTN 6; 10
Przetworniki elektroniczne z linearyzacją, z korekcją temperatury spoin odniesienia; także
w wersjach do montowania w głowicy czujnika, w wersjach z digitalizacją sygnału:
U/U
0 – 10 V
U/I
0 – 20 mA
4-przewodowe,
U/I
4 – 20 mA
2-przewodowe.
4.3.5. Układy sumujące (wielokrotne).
a)
b)
To
To
T1
T1
E
T2
E
T2
T3
Rys. 4.18. Sumujące układy termoelementów do pomiaru temperatury: a) średniej b) różnicowej
Jeżeli można linearyzować, wówczas zachodzi, dla układu z Rys. 4.18. a)
41
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
E E T1 To E T2 To E T3 To 3k Tsr To
oraz dla układu b)
E E T1 To E T2 To k T1 T2
4. POMIARY CIŚNIENIA
4.1. Wiadomości podstawowe
Definicja ciśnienia:
p
dP
dA
gdzie: P – siła nacisku, normalna do powierzchni A.
W płynach:
-
w danym punkcie płynu będącego w spoczynku ciśnienie działa jednakowo we
wszystkich kierunkach,
-
w płynie znajdującym się w stanie równowagi ciśnienie jest w każdym punkcie
prostopadłe do powierzchni na którą działa,
-
pomijąjąc siły ciążenia, w stanie równowagi, ciśnienie w każdym punkcie płynu ma
wartość jednakową.
W polu grawitacyjnym powierzchnie jednakowego ciśnienia są płaszczyznami poziomymi.
Wartość ciśnienia hydrostatycznego działającego na powierzchnię podstawy jednorodnego słupa
cieczy o gęstości ρ i wysokości h, w polu grawitacyjnym o przyspieszeniu g - wynosi:
ph h g
Powyższy wzór jest podstawą działania manometrów hydrostatycznych.
pa
- ciśnienie absolutne, wynikające z definicji,
42
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
pb
- ciśnienie absolutne atmosfery, ciśnienie barometryczne
p pa pb
(atmosferyczne),
- nadciśnienie .
Jednostki:
1 Pa
=1 N/m2
j. podstawowa,
1 hPa
= 100 Pa
1 MPa
= 106 Pa
1 bar
= 105 Pa
1 at
= 1 kG/cm2 = 98 066,5 Pa
1 Tr
= 1 mmHg = 133,322 Pa
1 mmH2O
= 9,806 65 Pa
(atmosfera techniczna)
(10 m H2O = 1 at ≈ 1 bar)
Zakresy praktyczne:
- b. niskie ciśnienia („głęboka próżnia”) 10-10 Tr do 0,1 Tr – pomiary metodami
molekularnymi,
- ciśnienia (różnice ciśnień) niskie
10-3 do 1 bar
- pomiary czujnikami
mechanicznymi i elektromechanicznymi o odpowiedniej konstrukcji,
- ciśnienia średnie
1 do 500 barów - pomiary typowymi
czujnikami mechanicznymi i elektromechanicznymi,
- ciśnienia wysokie
> 1 kbar
- specjalne konstrukcje lub
metody pomiarowe.
W warunkach przemysłowych, zmienność ciśnień określić można pasmem częstotliwości o
częstotliwościach granicznych:
0,001 0,1 Hz wielkie obiekty bez źródeł zakłóceń dynamicznych,
1
100 Hz
przy obecności zakłóceń, w szczególności maszyn tłokowych, zjawisk
rezonansowych i akustycznych,
Metody pomiaru ciśnień:
hydrostatyczne: np. barometr rtęciowy, U-rurka i podobne,
obciążnikowo-tłokowe: wzorcowe, kontrolne,
sprężyste, mechaniczne i elektromechaniczne (manometry z rurką Bourdone’a i
czujniki membranowe i piezorezystancyjne).
4.2. Manometr obciążnikowo-tłokowy
43
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
d
b
c
a
Rys. 5.1. Schemat manometru obciążnikowo-tłokowego
a – prasa z napędem śrubowym, b – sprawdzany manometr, c – tłok pomiarowy, d - obciążniki
Urządzenie pozwala, za pomocą prasy o napędzie śrubowym, wytwarzać ciśnienie o
wartościach, które w stanie równowagi, precyzyjnie odpowiadają użytym obciążnikom. Stan
równowagi jest osiągany, gdy wytworzone ciśnienie powoduje uniesienie tłoka do oznakowanej
wysokości. Dla zredukowania wpływu tarcia tłoka w cylindrze, na czas pomiaru nadaje mu się ruch
wirowy. Wykorzystanie obciążników o precyzyjnie wyznaczonej masie, stanowiącej wzorzec w tym
układzie pomiarowym, pozwala określać wartość zadawanego ciśnienia z wysoką dokładnością.
Przyrząd jest głównie stosowany do sprawdzania manometrów i elektronicznych czujników ciśnienia.
4.3. Manometr z rurką Bourdona
Podstawowym
przyrządem
mechanicznym,
przeznaczonym
do
pomiarów
ciśnienia
statycznego jest manometr z elementem sprężystym, w postaci rurki Bourdona, jego zasadę działania
przedstawia poniższy rysunek.
44
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Rys. 5.2. Zasada działania manometru z rurką Bourdona
Wykazują dodatnią wrażliwość temperaturową, histerezę. Klasy dokładności: 0,25 0,4 oraz
0,6; 1,6; 2,5; 4. Sposób poboru sygnału ciśnienia powinien chronić przed zaleganiem skroplin w
mediach
gazowych,
powstawaniem
bąbli
gazowych
w
mediach
ciekłych,
zaleganiem
zanieczyszczeń stałych, dostępem czynników aktywnych chemicznie. Stosowanie filtrów,
separatorów, także dolnoprzepustowych filtrów dynamicznych.
4.4. Czujniki z wyjściem elektrycznym
Dla umożliwienia transmisji sygnału pomiarowego (zdalne wskazanie, automatyka) oraz
dla pomiarów ciśnień dynamicznych, niezbędne jest użycie czujników elektromechanicznych.
Typowa jest konstrukcja czujnika membranowego z przetwornikami tensometrycznymi i
zintegrowanym przetwornikiem wyjściowym (kondycjonerem).
Układ
doprowadzenia
ciśnienia,
szczególnie
dla
sygnałów
dynamicznych,
może
powodować iż ciśnienia działające na membranę będą różnić się co do kształtu przebiegu od
ciśnień mierzonych. Dla pomiarów dynamicznych, właściwy dobór tego układu może mieć istotne
znaczenie. Membrana sprężysta przetwarza, działające na nią ciśnienie różnicowe na
odkształcenia na swojej powierzchni. Za pośrednictwem tensometrów są one przetwarzane na
zmiany ich rezystancji. W układzie mostka elektrycznego, zmiany rezystancji przetwarzane są na
zmiany napięcia i następnie, w odpowiednim wzmacniaczu, przetwarzane na znormalizowany prąd
wyjściowy.
45
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
a
b
c
d
e
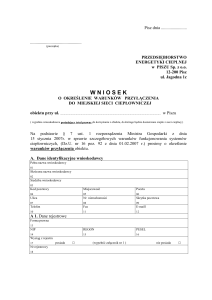
Rys. 5.3. Konstrukcja membranowego tensometrycznego czujnika ciśnienia
a – złącze elektryczne, b – układ elektroniczny, c – tensometry, d – membrana, e - króciec
W ogólnej strukturze takiego czujnika wyróżnić można cztery etapy przetwarzania,
przedstawione na schematycznym rysunku poniżej.
p
p
x
Ciśnienie mierz.
Doprowadzenie
ciśn.
Membrana
Różnica ciśnień
Odkształcenie
R
Tensometry
Zmiana rezystancji
Iwy
Kondycjoner
Prąd wyjściowy
Rys. 5.4. Schemat struktury membranowego tensometrycznego czujnika ciśnienia
Odkształcenia na powierzchni kołowej membrany zachodzą w kierunkach promieniowych jak
też wzdłuż współśrodkowych linii obwodowych. Zależą one od ciśnienia różnicowego, materiału i
konstrukcji membrany w sposób następujący:
obwodowe
2
2
31 R r
t
1
8E h R
promieniowe
2
2
31 R
r
r
1 3
8E h
R
p
p
46
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
gdzie:
E,
- moduł Younga i liczba Poissona,
r , R, h - promień bieżący, maksymalny i grubość membrany,
p
- różnicowe ciśnienie działające na membranę.
Jak łatwo zauważyć odkształcenia obwodowe są zawsze nieujemne, zaś promieniowe
zmieniają znak w funkcji promienia, co ilustrują wykresy na rysunku 5.5.
t
r
;
max max
1
-1
-2
R
Rys. 5.5. Rozkład odkształceń promieniowych i obwodowych wzdłuż średnicy membrany kołowej
Z powyższych właściwości wynika sposób tensometrycznego pomiaru odkształceń membrany:
promieniowo na obrzeżu i obwodowo w części centralnej, zapewnia to bowiem dostateczny sygnał
odkształceń różnicowych.
47
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
5. POMIARY PRZEPŁYWU
5.1. Pojęcia podstawowe – parametry przepływu
Rys. 6.1. Przepływ płynu przez przewód – podstawowe wielkości
Wielkości całkowe:
Wielkości różniczkowe:
ilość, objętość, masa,
prędkość, natężenie, strumień
Liczniki, gazomierze, wodomierze, wagi
przepływomierze, anemometry
dl
v (r )
dt
dV
V
vdA
dt
v
A
t1 T
V
T
Vt1 T Vt1
Vdt vdtdA
T A
t1
M
T
M t1 T M t1
t1 T
M dt
t1
qm M
dM
dt
q m qv
48
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
5.2. Zwężkowa metoda pomiaru natężenia przepływu
Założenia:
a) przewód poziomy,
a) płyn idealny (nieściśliwy, bez tarcia wewnętrznego),
b) stały rozkład prędkości po przekroju strugi,
c) przebieg odwracalny adiatermiczny
A
A1; p1
A2; p2
1
T
E
R
vM
1
O
M
E
T
R
Y
2
v2
Rys. 6.2. Rozkład strugi w otoczeniu kryzy, wielkości charakterystyczne
Prawo Bernulliego wyraża zasadę zachowania energii:
vdv dp 0
po scałkowaniu między płaszczyznami 1 i 2:
1
v 22 v12 p1 p2
2
dla płynu nieściśliwego:
A1 v1 A2 v 2
skąd:
v1 v 2 m '
gdzie:
m'
A2
A1
49
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
prędkość strugi w przekroju A2 wynosi:
v2
1
2p1 p 2
1 m' 2
mnożąc przez A2 otrzymujemy strumień objętości:
A2
V v 2 A2
przyjmując:
1 m
kontrakcja strugi
A2
A
A1
m' m
skąd
'
teoretyczna liczba przepływu:
A
m
moduł zwężki
2 p1 p 2
'2
1 2m 2
ostatecznie:
V ' A
2p1 p2
oraz
M ' A 2 p1 p2
Dla rzeczywistych płynów liczba przepływu różni się od teoretycznej.
Wg PN-EN ISO 5167-1 natężenie przepływu wyznacza się następująco:
qm
C
1
gdzie: współczynnik przepływu
4
1
4
d 2 2 p 1
C ,Re
d
D
przewężenie
liczba ekspansji
1 , p,
gęstość
wg wzoru lub z tablicy
wg wzoru lub z tablicy
, p
50
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
5.3. Rodzaje zwężek i sposobu poboru ciśnienia
Rys. 6.3. Rodzaje zwężek
Różnice dotyczą:
złożoności konstrukcyjnej, wrażliwości na liczbę Reynoldsa, straty
ciśnienia, wrażliwości na zanieczyszczenia, wrażliwości na zużycie.
Rys. 6.4. Przebiegi ciśnienia wzdłuż przewodu z kryzą
51
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
T1
p1
p2
qv, qv 0 , V , V0 , qm , qm0 , M , M 0 ,
Rys.6.5. Przepływomierz z kalkulatorem mikroprocesorowym
5.4. Rurka Pitota (Prandtla)
Ciśnienie działające na czołowy otwór rurki jest sumą ciśnienia statycznego i ciśnienia naporu
gazu (dynamicznego):
ps
v 2
2
const
stąd prędkość:
v
2 p
gdzie: p –ciśnienie różnicowe, ρ – gęstość gazu, zależna od jego temperatury i ciśnienia
statycznego.
52
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
PROGRAM ĆWICZEŃ LABORATORYJNYCH
Ćwiczenie nr 1
POMIARY TEMPERATURY
Cele dydaktyczne:
poznanie typowej strukturą toru pomiaru temperatury,
poznanie rezystancyjnej i termoelektrycznej metody pomiaru temperatury,
poznanie metod skalowania toru pomiaru temperatury,
poznanie właściwości prądowej metody transmisji sygnału pomiarowego.
Program ćwiczenia:
1. pomiar prądów wyjściowych w 6 torach pomiaru temperatury i wilgotności
i przeliczenie zmierzonych wartości prądów na wartości parametrów mierzonych,
2. pomiar charakterystyki przetwornika elektronicznego R/I I = f(R), wyznaczenie błędów
nieliniowości,
3. dostrojenie charakterystyki przetwornika elektronicznego R/I I = f(R) do właściwości
czujnika i jego obwodu,
4. sprawdzenie poprawności wyników strojenia - pomiar temperatury wody w
termostacie za pomocą czujnika rezystancyjnego z badanym przetwornikiem R/I, oraz
za pomocą termometru rtęciowego, ew. korekcja,
5. pomiar charakterystyki obciążenia przetwornika R/I: i = f(Robc) przy R=const,
Sprzęt:
-
przetwornik APR (R/I)
0 : 100 °C;
0 : 20 mA,
-
przetwornik APU (U/I)
0 : 150 °C;
0 : 20 mA,
-
przetwornik temp. i wilgotn. (R/I) APRX
0 : 100 °C;
0 : 20 mA,
0 : 100 %;
0 : 20 mA,
-
przetwornik temp. ściany AP-TOPM,
-30 : +60 °C;
4 : 20 mA,
-
przetwornik temp. zewnętrznej AP-TOPZ,
-30 : +60 °C;
4 : 20 mA,
-
zasilacze ZE-24,
- multimetr cyfrowy,
-
opornica dekadowa.
- czujnik Pt100/Rp0,5.
-
termometr rtęciowy wzorcowy,
- termostat.
53
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Ćwiczenie nr 2
BADANIE DYNAMIKI TERMOMETRU
Cele dydaktyczne:
poznanie modelu idealnego termometru,
poznanie metody identyfikacji za pomocą wymuszenia skokowego,
poznanie z optymalizacyjną metodą aproksymacji danych pomiarowych,
poznanie obsługi karty pomiarowej w programie VisiDAQ.
Program ćwiczenia:
1. zapoznanie się z obsługą komputerowej karty pomiarowej w programie VisiDAQ,
2. w VisiDAQ synteza struktury dla skalowania, wizualizacji i rejestracji sygnału
temperatury,
3. zbadanie wpływu prędkości przenoszenie czujnika pomiędzy zbiornikami na kształt
odpowiedzi,
4. rejestracja odpowiedzi skokowej termorezystancyjnego czujnika temperatury, w wersji
czujnika z osłoną i bez niej,
5. wyznaczenie wartości stałych czasowych dla obu wersji termometru oraz 99% czasu
odpowiedzi .
Sprzet:
-
PC + karta pomiarowa + oprogramowanie VisiDAQ,
-
czujnik termorezystancyjny,
-
przetwornik R/I,
-
ultratermostat i zbiornik z zimną wodą.
Ćwiczenie nr 3
54
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
BADANIA SYMULACYJNE OBIEKTÓW DYNAMICZNYCH
Badania w środowisku Matlab-Simulink
1. Dobór stałej czasowej termometru I rzędu dla pomiarów sygnału temperatury zawierającego
składową stałą i składową prostokątną o okresie 1 s (na drodze eksperymentów
symulacyjnych w Simulink’u):
a)
w przypadku gdy termometr przeznaczony jest dla pomiaru składowej stałej, z
błędem nie większym niż 1 %,
b)
gdy termometr jest przeznaczony dla pomiaru wartości międzyszczytowej z
błędem nie większym niż 1 %,
c)
gdy termometr jest przeznaczony do pomiaru wartości chwilowej z błędem nie
większym niż 1 % (po uściśleniu kryterium błędu).
2.
Synteza i badanie truktury modelu systemu termostatu z regulatorem dwustawnym, (obiekt
jako element 1 rzędu z opóźnieniem),
a)
Obserwacja przebiegów w istotnych punktach systemu,
b)
Ocena wpływu czasu opóźnienia na jakość regulacji, określoną poprzez
międzyszczytową wartość błędu, błąd wartości średniej, oraz częstotliwość
sygnału błędu,
c)
Ocena wpływu nastawy (wartości zadanej) na jakość regulacji, określoną
poprzez międzyszczytową wartość błędu, błąd wartości średniej, oraz
częstotliwość sygnału błędu,
d)
Określenie założeń konstrukcyjnych niezbędnych dla osiągnięcia stabilizacji
temperatury na poziomie względnym 0,01,
przy zadanym opóźnieniu o
wartości 0,1 s.
3.
W środowisku Matlab-Simulink synteza struktury modelu systemu z obiektem inercyjnym I
rzędu (stała czasowa 1 s) z opóźnieniem (0,5 s) i z regulatorem PID,
a)
Obserwacja przebiegów w istotnych punktach systemu,
55
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
b)
Dobór struktury proporcjonalnej regulatora i ocena błędu statycznego,
przeregulowania
i
czasu
odpowiedzi
w
zależności
od
dobranego
współczynnika wzmocnienia,
c)
Dobór struktury PI regulatora i ocena błędu statycznego, przeregulowania i
czasu odpowiedzi w zależności od dobranych współczynników P oraz I,
optymalizacja regulatora metodą prób i błędów,
d)
Dla ustalonych parametrów regulatora, zbadanie wpływu czasu opóźnienia
obiektu na jakość regulacji,
Wyposażenie stanowiska:
-
komputer z drukarką,
-
pakiet Matlab/Simulink.
Ćwiczenie nr 4
SYNTEZA WIRTUALNEGO REGULATORA PID
z wykorzystaniem komputerowej karty pomiarowej i pakietu VisiDAQ
56
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
Cele dydaktyczne:
poznanie problematyki i metod projektowania i użytkowania komputerowego systemu
akwizycji i wizualizacji danych pomiarowych,
wykorzystanie różnorodnych metod pomiarowych objętości, natężenia przepływu,
ciśnienia, prędkości obrotowej,
poznanie struktury wieloparametrycznego systemu pomiarowego.
Program ćwiczenia:
1. zapoznanie się ze stanowiskiem sprężarki, określenie sygnałów mierzonych i sposobu
ich pomiaru,
2. opracowanie struktury w programie VisiDAQ dla akwizycji i wskazania chwilowych
wartości ciśnienia,
3. korekcja współczynników skalowania komputerowego wskazania ciśnienia na
podstawie wskazań manometru z rurką Bourdona,
4. uzupełnienie struktury o zapis danych do pliku,
5. uzupełnienie struktury o bieżący wykres przebiegu ciśnienia,
6. uzupełnienie struktury o pomiar, zapis i wykres natężenia przepływu,
7. uzupełnienie struktury o pomiar, zapis i wykres prędkości obrotowej,
8. uzupełnienie struktury o regulator PID,
9. strojenie regulatora P a następnie PI i liczbowa ocena rezultatów dostrajania,
osiąganych w trakcie odpowiedzi systemu na skok wartości zadanej (czas
odpowiedzi, przeregulowanie i błąd statyczny),
Literatura:
1. L. Michalski,.....
Termometria. Przyrządy i metody
Pol.Ł. 1998
2. E. Romer
Miernictwo przemysłowe
PWN
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r
1978
57
Studium podyplomowe KLIMATYZACJA I OGRZEWNICTWO
UKŁADY REGULACJI AUTOMATYCZNEJ I SYSTEMY POMIAROWE
Konspekt. Opracowanie Marcin Borelowski
3. S.Skoczowski
Technika regulacji temperatury
Pom. Automatyka Kontrola,
W-wa/Zielona Góra
WNT
2000
4. W. Styburski
Przetworniki tensometryczne
5. M.Żelazny
Podstawy automatyki,
6. J.Brzózka
Ćwiczenia z automatyki w Matlabie i Siumlinku MIKOM 1997
7. R. Józefowski
Opis pakietu VisiDAQ.pdf
8. P.H.Sydenham
Podręcznik metrologii
WKŁ
9. W. Mielczarek
Szeregowe interfejsy cyfrowe
Helion 1993
10. J.L.Kulikowski
Komputery w badaniach doświadczaknych
PWN
11. W.Winiecki
Organizacja komputerowych systemów pomiarowych
Oficyna Wydawnicza PW
12. J.Jakubiec, J.Roj
Pomiarowe przetwarzanie próbkujące
Wyd.P.Śl.
13. S. Mielnicki
Centralne ogrzewanie regulacja i eksploatacja Arkady
1976
1988
1993
1999
2000
1985
58
POLITECHNIKA KRAKOWSKA, Instytut Inżynierii Cieplnej i Ochrony Powietrza
K r a k ó w, 2004 r