Paweł WÓJCIK
Marian P. KAŹMIERKOWSKI
DWUSTREFOWE STEROWANIE MOMENTU
I STRUMIENIA NAPĘDU FALOWNIKOWEGO
Z SILNIKIEM INDUKCYJNYM KLATKOWYM
STRESZCZENIE
Niniejszy artykuł opisuje sterowanie
silnikiem indukcyjnym klatkowym zasilanym z falownika napięcia
w obszarze osłabionego strumienia. Praca powyŜej prędkości
bazowej wiąŜe się z ograniczeniami wynikającymi z maksymalnego
napięcia
wyjściowego
przekształtnika
energoelektronicznego,
maksymalną dopuszczalną wartością prądu fazowego silnika oraz
ograniczeniem momentu elektromagnetycznego w obszarze stałej
mocy i stałego poślizgu. W tym artykule przedstawiono metodę maksymalizacji momentu w obszarze osłabiania strumienia, oraz porównano ją z powszechnie stosowaną w praktyce metodą 1/omega. Sterowanie silnika indukcyjnego zostało zrealizowane w oparciu o metodę bezpośredniej regulacji momentu z modulacją wektorową (ang.
Direct Torque Control with Space Vector Modulation DTC–SVM).
W artykule przedstawione zostały wyniki eksperymentalne dla
silnika trakcyjnego 75 kW.
Słowa kluczowe: osłabianie strumienia, bezpośrednie sterowanie
momentem i strumieniem, silnik indukcyjny klatkowy
mgr inŜ. Paweł WÓJCIK
e-mail: [email protected]
prof. dr hab. InŜ. Marian P. KAŹMIERKOWSKI
e-mail: [email protected]
Zakład Elektrycznych Napędów Obrabiarkowych
Instytut Elektrotechniki
PRACE INSTYTUTU ELEKTROTECHNIKI, zeszyt 239, 2008
132
P. Wójcik, M. P. Kaźmierkowski
1. WSTĘP
Silniki indukcyjne klatkowe ze względu na swoje właściwości zarówno
mechaniczno – elektryczne (prosta konstrukcja, brak mechanicznego
komutatora, zasilanie prądem przemiennym, moŜliwość sterowania z falownika
napięcia, szeroki zakres mocy), jak i eksploatacyjne (niezawodność, moŜliwość
stosowania w trudnych warunkach (przepompownie, kopalnie, etc),
uniwersalność) są najczęściej stosowane w przemyśle. Częstym wymaganiem
stawianym napędom z silnikami indukcyjnymi jest praca z prędkościami
przekraczającymi wartość znamionową. Określa się tzw. prędkość bazową. Jest
to prędkość, którą moŜe osiągnąć silnik indukcyjny przy określonym napięciu
zasilania i wynikającej z niego wartości strumienia stojana. Aby osiągnąć
wyŜszą prędkość naleŜy zmniejszyć amplitudę strumienia stojana. Operacja
taka nosi nazwę osłabiania strumienia lub osłabiania pola. Osłabianie
strumienia jest stosowane głównie w napędach obrabiarkowych i trakcyjnych.
W obszarze powyŜej prędkości bazowej (obszar stałej mocy i obszar stałego
poślizgu) dynamika napędu jest ograniczona przez limit napięcia wyjściowego
falownika i limit prądu [2,3,7]. Limity te zmniejszają maksymalną wartość
momentu jaki moŜe być wytworzona przez silnik. NaleŜy więc stosować takie
algorytmy osłabiania pola, które uwzględniają istniejące ograniczenia i zadają
optymalny z punktu widzenia maksymalizacji momentu strumień [9].
W literaturze znane jest wiele metod sterownia silnikami indukcyjnymi
[4-6]. Podstawowy podział tych algorytmów zawiera dwie grupy: metody
skalarne i metody wektorowe. Przykładem sterowania skalarnego jest metoda
U/f=const. Bazuje na analizie silnika w stanie ustalonym. W metodzie tej silnik
osiąga drugą strefę prędkości automatycznie. Wraz ze wzrostem prędkości
ponad prędkość bazową amplituda strumienia zmniejsza się automatycznie
zgodnie z równaniem napięciowym dla stojana silnika indukcyjnego. Sterowanie
skalarne ma jednak szereg wad (nie zapewnia dobrej dynamiki i nie daje
kontroli momentu i strumienia) i nie nadaje się do większości zastosowań
przemysłowych. Dlatego w przemyśle stosowane są sterowania wektorowe.
Pozwalają one na pośrednią (sterowanie zorientowane polowo) lub
bezpośrednią (bezpośrednie sterowanie momentem) kontrolę momentu
i strumienia. Sterowanie wektorowe nie zapewnia jednak automatycznego
zmniejszania amplitudy strumienia stojana w celu uzyskania większej
prędkości. Silnik rozpędza się do prędkości na jaką pozwala napięcie obwodu
prądu stałego falownika. Dlatego, aby zwiększyć zakres prędkości, konieczne
jest stosowanie algorytmów osłabiania strumienia. Idealną metodą wektorową,
gdzie moŜna zastosować taki algorytm jest bezpośrednie sterowanie
momentem z modulacją wektorową (ang. Direct Torque Control with Space
Dwustrefowe sterowanie momentu i strumienia napędu falownikowego z silnikiem …
133
Vector Modulation DTC–SVM) [1, 4 - 6, 10]. W strukturze równoległej [10]
niezaleŜnie i bezpośrednio kontroluje się moment i strumień. Zadany strumień
stojana moŜe więc zostać wyznaczony przez algorytm osłabiania pola,
a regulator strumienia ze struktury DTC–SVM ustali strumień silnika na Ŝądanej
wartości.
2. BEZPOŚREDNIE STEROWANIE MOMENTEM
Z MODULACJĄ WEKTOROWĄ (DTC–SVM)
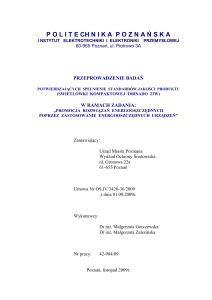
Na rysunku 1 przedstawiono schemat blokowy metody bezpośredniego
sterowania momentem z modulacją wektorową DTC–SVM.
STEROWANIE DTC–SVM
S zad
PI
Usx
UDC
Us
SA
xy
SVM
^
S
SB
SC
PI
m zad
^
m
e zad
PI
^
e
Usy
Us
^
ss
IM
Rys. 1. Schemat blokowy metody DTC–SVM
Przedstawiony na rysunku 1. algorytm porównuje prędkość zadaną
z prędkością rzeczywistą. Powstały uchyb doprowadzany jest do regulatora PI
prędkości, który zadaje moment. Wartość momentu jest ograniczana zgodnie
z algorytmem maksymalizującym jego wartość zaleŜnie od zadanej amplitudy
strumienia stojana. śądana amplituda strumienia stojana jest wyznaczana przez
blok osłabiania pola. Zadane wartości strumienia i momentu są porównywane
z wartościami rzeczywistymi, a powstałe uchyby są doprowadzane do
regulatorów. Regulatory wyznaczają składowe wektora napięcia stojana
w układzie wirującym zgodnie z wektorem strumienia stojana. Zadany wektor
napięcia po transformacji do układu stacjonarnego jest realizowany przez
modulator wektorowy, który wyznacza czasy załączeń tranzystorów
w falowniku.
134
P. Wójcik, M. P. Kaźmierkowski
3. OSŁABIANIE STRUMIENIA
Najstarszą metodą osłabiania strumienia jest uzaleŜnienie jego amplitudy
od prędkości mechanicznej. Metoda ta nosi nazwę 1/omega. Nie uwzględnia
ona jednak ograniczeń wynikających z napięcia zasilania falownika, oraz
z ograniczeń prądowych silnika i falownika. Tym samym nie uwzględnia
ograniczeń momentu. Zdarza się więc, Ŝe przy przyjęciu zbyt wysokiej
prędkości bazowej (w celu uzyskania większego strumienia przy danej
prędkości, a zarazem większego momentu) algorytm osłabiania strumienia
załącza się zbyt późno. Skutkuje to brakiem napięcia (napięcie zadane
przekracza moŜliwości falownika) i tym samym niemoŜliwością generacji
zadanego momentu – silnik przestaje się rozpędzać lub rozpędza się znacznie
wolniej (mniejszy moment). Zapas napięcia moŜe być zrobiony poprzez
obniŜenie prędkości bazowej, ale wówczas strumień zadany jest duŜo mniejszy
od optymalnego (patrz równanie (1)). Efektem tego jest moŜliwość generacji
momentu mniejszego niŜ wynikałoby to z dostępnego napięcia falownika.
Ψ S zad =
ωb
⋅ Ψ SN
ωm
(1)
gdzie:
ωm –
ωb –
Ψ SN –
Ψ S zad –
prędkość mechaniczna
prędkość bazowa
strumień znamionowy
strumień zadany
Klasyczną metodę 1/omega moŜna zmodyfikować tak, aby uwzględnione
zostały ograniczenia prądowo – napięciowe maksymalizujące moment.
W układzie wirującym synchronicznie z wektorem strumienia stojana
składowe wektora napięcia mają postać:
U SX = R S ⋅ I SX
(2)
gdzie:
U SX – amplituda składowej wektora napięcia stojana w osi x w układzie
wirującym zgodnie z wektorem strumienia stojana
– rezystancja stojana
RS
I SX – amplituda składowej wektora prądu stojana w osi x w układzie
wirującym zgodnie z wektorem strumienia stojana
Dwustrefowe sterowanie momentu i strumienia napędu falownikowego z silnikiem …
U SY ≈ R S ⋅ I SY + p b ⋅ ω m ⋅ Ψ S
135
(3)
gdzie:
U SY – amplituda składowej wektora napięcia stojana w osi y w układzie
RS
wirującym zgodnie z wektorem strumienia stojana
– rezystancja stojana
I SY – amplituda składowej wektora prądu stojana w osi y w układzie
wirującym zgodnie z wektorem strumienia stojana
p b – liczba par biegunów
ω m – prędkość mechaniczna
Ψ S – amplituda wektorem strumienia stojana
Równanie (3) zakłada pomijalną wartość pulsacji poślizgu w stosunku do
prędkości mechanicznej, co ma miejsce dla prędkości z obszaru osłabionego
strumienia. Biorąc pod uwagę limit napięcia:
2
2
2
U SX
+ U SY
≤ U Smax
(4)
gdzie:
U Smax – maksymalna wartość amplitudy napięcia stojana (zaleŜna od
napięcia w obwodzie pośredniczącym i techniki modulacji)
Ograniczenie prądu z równania (3) powinno wyraŜać się wzorem:
I SY ≤
U SY − p b ⋅ ω m ⋅ Ψ S
RS
(5)
Ograniczenie (5) wynika z limitu napięcia generowanego przez falownik.
Analogicznie do równania (4) ograniczenie prądu ma postać:
2
2
2
I SX
+ I SY
≤ I Smax
(6)
gdzie:
I Smax – maksymalna wartość amplitudy prądu stojana (zaleŜna od
załoŜonej przeciąŜalności prądowej silnika oraz
zastosowanych elementów przełączających falownika)
od
136
P. Wójcik, M. P. Kaźmierkowski
Maksymalny prąd jest z reguły ustalany na kilkukrotność (1,5 – 2 krotność)
prądu znamionowego.
Ograniczenie momentu w stanie ustalonym opisują równania (7) i (8):
M emax =
1
M lim
=
e
3
⋅ p b ⋅ Ψ S ⋅ I SY
2
(7)
3
1-σ
⋅ pb ⋅
⋅ Ψ S2
2
2 ⋅σ ⋅ LS
(8)
Równanie (8) opisuje jednocześnie ograniczenie momentu [8].
Biorąc pod uwagę równania (5) i (7) wynikające z nich ograniczenie
momentu ma postać:
M
lim2
e
U Smax ⋅ Ψ S - p b ⋅ ω m ⋅ Ψ S2
3
= ⋅ pb ⋅
2
RS
(9)
gdzie:
M emax – moment, który moŜe być wytworzony przez silnik przy
M elim1
maksymalnej
wartości
prądu
stojana
(dopuszczalna
przeciąŜalność)
– ograniczenie momentu wynikające z ograniczenia prądu
M lim2
– ograniczenie momentu wynikające z ograniczenia napięcia
e
σ
– współczynnik rozproszenia
LS
– indukcyjność stojana
Sterowanie w obszarze osłabionego pola musi uwzględniać wszystkie
ograniczenia, dlatego teŜ moment zadany nie moŜe przekroczyć mniejszej
wartości z równań (8) i (9).
Porównując stronami równania (8) i (9) otrzymujemy optymalną wartość
zadanej amplitudy wektora strumienia (równanie (10)).
Ψ S zad =
U Smax
1-σ R S
p b ⋅ ωm +
⋅
2 ⋅ σ LS
gdzie:
Ψ S zad
–
strumień zadany
(10)
Dwustrefowe sterowanie momentu i strumienia napędu falownikowego z silnikiem …
137
Mianownik równania (10) jest większy niŜ w równaniu (1). Oznacza to, Ŝe
zadany strumień jest mniejszy niŜ w metodzie 1/omega. Podana metoda
zapewnia maksymalizację momentu w obszarze osłabionego strumienia
zapewniając jednocześnie zapas napięcia potrzebny na wytworzenie takiego
momentu.
4. WYNIKI EKSPERYMENTALNE
Badania eksperymentalne zostały przeprowadzone dla napędu
trakcyjnego o mocy 75 kW. Parametry zastosowanego silnika indukcyjnego
typu STDa–200L4 są przedstawione w tabeli 1. Moment bezwładności układu
wynosi 15 kg·m2 (na wale maszyny zamontowano dodatkowe koła zamachowe
symulujące ¼ momentu bezwładności tramwaju – tramwaj ma dwa wózki
z dwoma silnikami kaŜdy). Zastosowane obciąŜenie symuluje pracę napędu w
rzeczywistych warunkach. Podczas ruszania pojazdu z przystanku moment jest
maksymalny, podczas jazdy maleje odwrotnie proporcjonalnie wraz ze
wzrostem prędkości, podczas hamowania zwiększa się (zatrzymanie
rozpędzonej masy).
TABELA 1
Parametry silnika indukcyjnego STDa–200L4
PN
IN
fN
ωN
MN
Uzas
p
75 kW
160 A
68 Hz
2000 obr/min
358 N·m
3 x 380 V
2
RS
RR
LS
LR
LM
J
31 mΩ
31 mΩ
11 mH
11 mH
9 mH
2
15 kg·m
Na rysunku 2. przedstawiono rozruch i hamowanie silnika. Test został
przeprowadzony przy obniŜonym napięciu zasilania. Dzięki temu osiągnięto
niŜszą prędkość bazową. Strumień stojana osłabiany jest według zaleŜności
(10). Wraz ze wzrostem prędkości moment zadany musi być ograniczany
zgodnie ze wzorami (8) i (9). Ograniczenie momentu zmniejsza szybkość zmian
prędkości. Zmniejszenie strumienia zmniejsza równieŜ amplitudę prądu stojana,
gdyŜ w silniku indukcyjnym większość prądu zuŜywana jest na magnesowanie.
Mniejszy strumień oznacza mniejszy prąd.
138
P. Wójcik, M. P. Kaźmierkowski
Rys. 2. Rozruch i hamowanie silnika indukcyjnego 75kW z zastosowaniem osłabiana
pola (Jednostki: Strumień stojana ΨS [0,4 Wb/dz], prędkość mechaniczna ωm [1000 obr1/dz], moment Μe [100 N·m/dz], prąd fazowy ΙA [200 A/dz])
Wyznaczone ograniczenia momentowe mogą być stosowane w całym
zakresie prędkości (obszar stałego momentu, obszar stałej mocy i obszar
stałego poślizgu). Pracę układu napędowego poniŜej prędkości bazowej
przedstawiono na rysunkach 3 i 4.
Rys. 3. Praca w pętli regulacji momentu – nawroty ze
stałym momentem +/- 100 N·m(Jednostki: Prędkość
-1
mechaniczna ωm [400 obr /dz], moment Μe [100 N·m/dz],
prąd fazowy ΙA [200 A/dz])
Dwustrefowe sterowanie momentu i strumienia napędu falownikowego z silnikiem …
139
Na rysunku 3 przedstawiono pracę w pętli regulacji momentu. Jest to
typowy tryb pracy układów napędowych stosowany w trakcji. Nie wykorzystuje
się w nim pętli regulacji prędkości. Kontrolę prędkości uzyskuje się poprzez
zadawanie momentu.
Układ moŜe pracować równieŜ w pętli regulacji prędkości. Na rysunku 4
przedstawiono skrócony cykl pracy tramwaju.
Rys. 4. Praca w pętli regulacji prędkości – rozruch
i hamowanie (Jednostki: Prędkość mechaniczna ωm
-1
[200 obr /dz], moment Μe [200 N·m/dz], prąd fazowy ΙA
[200 A/dz])
Rozruch odbywa się z maksymalnym momentem, następnie pojazd
porusza się ze stałą prędkością (moment zadany około zera), po czym
następuje hamowanie (zadanie maksymalnego momentu ujemnego).
Schemat stanowiska laboratoryjnego przedstawiono na rysunku 5, a zdjęcia
stanowiska laboratoryjnego przedstawiono na rysunku 6. Stanowisko składa się
z falownika 75 kW z wbudowanym prostownikiem diodowym. Istnieje moŜliwość
odłączenia prostownika i zasilania bezpośredniego z sieci napięcia stałego.
Komunikacja z komputerem zawierającym kartę dSpace 1103 odbywa się
poprzez układ sprzęgu izolacyjno – pomiarowego zawierającego przetworniki
A/C i C/A, oraz układy generacji PWM (transmisja światłowodowa).
140
P. Wójcik, M. P. Kaźmierkowski
Rys. 5. Schemat blokowy stanowiska laboratoryjnego
Rys. 6. Stanowisko laboratoryjne – zdjęcia
Dwustrefowe sterowanie momentu i strumienia napędu falownikowego z silnikiem …
141
5. WNIOSKI
W artykule przedstawiono pracę układu napędowego z trakcyjnym
silnikiem indukcyjnym pracującego powyŜej prędkości bazowej (druga strefa).
Zastosowane sterowanie DTC–SVM pozwala na łatwą implementacje
algorytmu osłabiania strumienia. Zadany strumień podawany jest bezpośrednio
na regulator strumienia. Nie ma potrzeby przeliczania strumienia i momentu na
prąd jak ma to miejsce w metodach zorientowanych polowo. Pomijalny jest więc
wpływ parametrów na jakość sterowania DTC–SVM. RównieŜ ograniczenie
momentu oddziałuje bezpośrednio na wyjście regulatora prędkości zadającego
moment. Zaprezentowana metoda osłabiania pola zadaje optymalny dla danej
prędkości strumień, który zapewnia maksymalizację momentu w drugiej strefie
regulacji. Dodatkowo metoda charakteryzuje się prostotą i łatwością
implementacji.
LITERATURA
1.
Habetler T.G., Profumo F., Pastorelli M.: Direct torque control of induction machine over a
wide speed range. IEEE Industry Application Society Annual Meeting, vol. 14, pp. 600-606,
1992.
2.
Kim S.H., Sul S.K.: Maximum torque control of an induction machine In the field weakening
region. IEEE Transactions on Industrial Electronics, vol. 31, pp. 787-794, 1995.
3.
Kim S.H., Sul S.K.: Voltage control strategy for maximum torque operation of an induction
machine in the field-weakening region. IEEE Transactions on Industrial Electronics, vol. 44,
pp. 512-518, 1997.
4.
Kaźmierkowski M.P., Tunia H.: Automatic control of converter fed drives. ELSEVIER,
Amsterdam-London-New York-Tokyo, 1994.
5.
Kaźmierkowski M.P., Krishnan R., Blaabjerg F.: Control in power electronics – selected
problems. Academic Press, 2002.
6.
Kowalska-Orłowska T.: Bezczujnikowe układy napędowe z silnikami indukcyjnymi. Oficyna
Wydawnicza Politechniki Wrocławskiej, Wrocław, 2003.
7.
Shin M.H., Hyun D.S., Cho S.B.: Maximum torque control of stator-flux-oriented induction
machine drive in the field-weakening region. IEEE Transactions on Industry Applications,
vol. 38, pp. 117-122, 2002.
8.
Xu X., Doncker D.,Novotny D.W.: A stator flux oriented induction machine drive. IEEE
PESC 1988, pp. 870-876, 1988.
9.
Xu X., Novotny D.W.: Selection of the flux reference for induction machine drives in the
field weakening region. IEEE Transactions on Industry Applications, vol.28, pp. 13531358,1992.
10. śelechowski M.: Space vector modulated-direct torque controlled (DTC-SVM) inverter-fed
induction motor drive. praca doktorska, Warszawa, Polska , 2005.
142
P. Wójcik, M. P. Kaźmierkowski
Rękopis dostarczono dnia 3.12.2008 r.
Opiniował: prof. dr hab. inŜ. Marian PASKO
TORQUE AND FLUX CONTROL OF INDUCTION MACHINE
DRIVE IN FLUX WEAKENING REGION
Paweł WÓJCIK, Marian P. KAŹMIERKOWSKI
ABSTRACT in English
In this paper PWM inverter fed
induction motor drive performance in field weakening region is
presented. Above base speed voltage and current limitations have an
influence on electromagnetic torque production. Therefore,
maximization of the torque has to be done under weaken flux
magnitude. In this paper an algorithm of flux weakening with torque
maximization is presented and compared to classical 1/omega
method.
Presenter induction motor drive is controlled by Direct Torque Control
with Space Vector Modulation (DTC–SVM) algorithm. Some
experimental results of 75 kW traction machine based drive are
attached.