Wykład 2.
6 X 2004
PRZYSPIESZENIE I JEGO SKŁADOWE W UKŁADZIE KARTEZJAŃSKIM
Wektor przyspieszenia w układzie kartezjańskim - zapis w formalizmie wersorowym.
Przyspieszenie można przedstawić w układzie kartezjańskim jako wektor o trzech
współrzędnych:
a = ax i + ay j + az k
Składowe: axi, ayj, azk są wektorami powstałymi przez prostokątne rzutowanie wektora a
na osie OX, OY oraz OZ.
Zachodzą związki:
dv y
dv x
dv z
ax =
,
ay =
, az =
, które wynikają z definicji wektora przyspieszenia jako
dt
dt
dt
pochodnej wektora prędkości oraz przedstawienia wektora prędkości w formie zapisu z
użyciem wersorów:
v = vx i + vy j + vz k
PRZYSPIESZENIE STYCZNE I NORMALNE.
Układ współrzędnych naturalny - definicja.
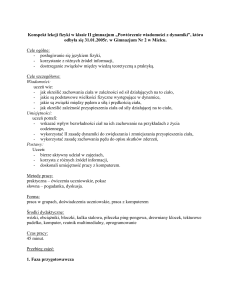
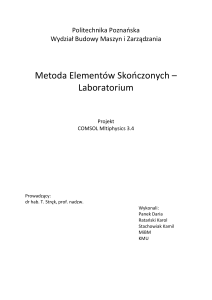
Załóżmy, że cząstka porusza się po torze
krzywoliniowym. W chwili t znajduje się ona w
punkcie toru P1 a w chwili (t +t) w punkcie P2.
Definiujemy w punkcie toru P1 wersor styczny do
toru es oraz w kierunku prostopadłym do toru
wersor normalny en. Wersory te przemieszczają
się wraz z cząstką wzdłuż toru ruchu i w
przypadku toru krzywoliniowego będą zmieniały
swój kierunek.
Porównaj kierunki wersorów na rysunku w chwili
t w punkcie P1 i w
chwili (t +t) w
punkcie P2.
Prędkość w układzie naturalnym.
Prędkość w układzie naturalnym można zapisać bardzo prosto:
v = v(t) es. Wyrażony jest w ten sposób fakt, że wektor
prędkości jest styczny do toru.
Przyspieszenie w układzie naturalnym. Pokazanie, że:
dv
v2
a=
es +
en
dt
d
dv
dv
Zgodnie z definicją przyspieszenia: a=
=
ve s =
dt
dt
dt
de
dv
es + v s . Przy wersorze stycznym mamy wielkość
, która
dt
dt
informuje jak zmienia się wartość wektora prędkości. Dla uzyskania pełnej zależności dla
przyspieszenia należy przeanalizować pochodną czasową wersora stycznego.
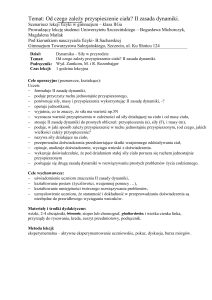
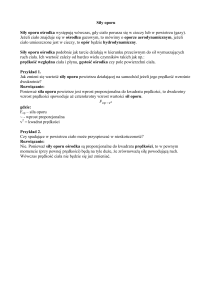
de d
Obliczenie pochodnej wersora stycznego po czasie: s =
en
dt d t
Na rysunku obok pokazane są sprowadzone do wspólnego punktu wersory styczne do toru w
chwili t (w punkcie toru P1) oraz t+dt . Kąt jaki one tworzą wynosi d, można więc znaleźć
długość przyrostu wersora stycznego:
de s = e s d dbo długość wersora wynosi jeden. Pozostaje jeszcze znaleźć kierunek
przyrostu wersora des.
de
Dowód, że s jest prostopadłe do es.
dt
Biorąc iloczyn skalarny wersorów e s e s =1. Obliczając pochodną po czasie obu stron
otrzymamy dla strony lewej:
de
de
de
d
es es s es es s 2 s es oraz dla prawej:
dt
dt
dt
dt
d
de
(1) 0 . Czyli łącząc te związki mamy: 2 s es 0 . Ponieważ ani długość wersora ani
dt
dt
jego pochodna nie są równe zeru, to musi zachodzić sytuacja, że wersor styczny jest
prostopadły do swojej pochodej czasowej.
Mamy więc znaleziony kierunek przyrostu wersora stycznego. Jest on zgodny z kierunkiem
wersora normalnego, czyli:
de d
des=d en. Stąd mamy związek dla pochodnej wersora stycznego: s =
en.
dt d t
Obliczenie as i an oraz ich interpretacja fizyczna.
Wracając do wzoru opisującego przyspieszenie w układzie naturalnym i wstawiając
otrzymany wynik dla pochodnej wersora stycznego otrzymamy:
d
dv dv
a= =
es + v
e n.
dt
dt
dt
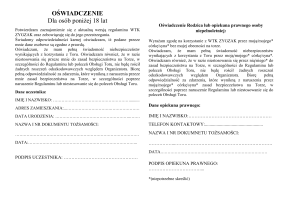
Kąt djest również kątem jaki tworzą dwie proste prostopadłe do toru w kolejnych punktach
toru (P1 i P2) odpowiadających położeniu cząstki w czasie t i czasie t+dt. Proste te przecinając
się tworzą odcinki o długościach równych promieniowi krzywizny oznaczanemu przez.
d d s 1
Ponieważ łuk P1P2 ma długość ds, to można zapisać związek ds = dczyli
.
dt dt
ds
d
1
v . Otrzymujemy więc wynik:
Ponieważ wartość prędkości v =
, to
dt
dt
2
v
dv dv
a= =
es + en.
dt
dt
UWAGA - Wnioski końcowe. To jest najważniejsze !!
dv
określa nam jak zmienia się wartość prędkości w
dt
v2
ruchu, natomiast wartość przyspieszenia normalnego
określa jaka jest krzywizna toru
Wartość przyspieszenia stycznego
czyli zawiera informację o zmianie kierunku wektora prędkości.
Problem: Kiedy v=const, a przyspieszenie całkowite a 0? [odpowiedź na końcu tekstu]
Klasyfikacja ruchów ze względu na przyspieszenie.
v2
dv dv
Przyspieszenie: a=
=
es +
en = a s es +a n en
dt
dt
kierunek prędkości stały, wartość stała - ruch prostoliniowy jednostajny.
a s= 0, a n=0,
kierunek prędkości stały, wartość zmienna - ruch prostoliniowy zmienny
a s niezerowe, a n= 0,
kierunek prędkości zmienny, wartość stała - ruch krzywoliniowy po okręgu
a s = 0, a n stałe i różne od zera, R i stałe równe promieniowi okręgu.
kierunek prędkości zmienny, wartość zmienna - ruch krzywoliniowy zmienny
a s zmienne, a n zmienne, zmienne.
Sprawdź czy to rozumiesz. Sam(a) spróbuj opisać w ten sposób różne znane Ci z życia
codziennego lub z kursu fizyki szkolnej przykłady ruchów.
ŚREDNIA PRĘDKOŚĆ I ŚREDNIE RZYSPIESZENIE.
Definicja prędkości średniej i przyspieszenia średniego.
Prędkość średnia określona jest jako iloraz wektora przemieszczenia, które nastąpiło w
skończonym czasie t do wartości tego przedziału czasu t:
r
v średnie (t) =
.
t
Podobnie przyspieszenie średnie jest ilorazem zmiany wektora prędkości v, która nastąpiła
w skończonym czasie t do wartości tego przedziału czasu t:
v
. Są to wielkości wektorowe.
t
TRANSFORMACJA GALILEUSZA.
a średnie (t) =
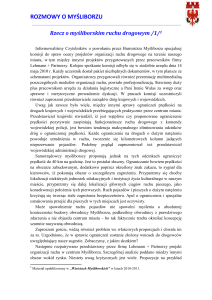
Opis ruchu punktu P (DOWOLNY RUCH OBIEKTU - NA PRZYKŁAD MUCHY) w
układach inercjalnych U oraz U' – transformacja Galileusza.
Jeśli układ U' zwany dalej primowanym porusza się ze stałą prędkością vu tak, że osie OX
oraz OX' są równoległe oraz w chwili t=0 punkty O i O’ pokrywały się, wtedy:
OO' = vu t
Oraz współrzędna muchy P:
x(t) = x'(t) + vu t
Stąd składowe prędkości muchy na osie ox oraz ox' spełniają relację:
vx (t)= vx' (t) + vu
oraz podobnie:
ax (t) = ax' (t)
(pomyśl co stało się z pochodną po czasie vu ?)
Mnożąc obie strony przez masę cząstki otrzymamy wniosek, że także siły działające na obiekt
(muchę) są równe w obu układach odniesienia:
Fx(t) = Fx' (t)
UWAGA:
Zauważ, że nie ma tu nigdzie mowy o siłach działających na układ xOy czy x'O'y'. Pomyśl
dlaczego tak jest. Pomocne będzie pytanie: "Jaką masę ma układ U oraz U'?"
UKŁADY INERCJALNE.
Analizując ruch cząstki w układzie poruszającym się ruchem jednostajnym i prostoliniowym
względem obserwatora nieruchomego otrzymamy równanie opisujące siłę na nią działającą
identyczne jak dla układu nieruchomego. Prawa dynamiki Newtona opisują więc poprawnie
ruch w każdym układzie inercjalnym.
Można sformułować zasadę względności Galileusza.
Wszystkie prawa mechaniki wyglądają identycznie we wszystkich inercjalnych układach
odniesienia.
Fizycy mówią: Prawa mechaniki są niezmiennicze ze względu na wybór inercjalnego układu
odniesienia.
Uwaga na marginesie:
Okaże się, że transformacja Galileusza jest jednak tylko przybliżeniem. Dla dużych prędkości
układu inercjalnego zaczynają się kłopoty podczas używania przepisu na dodawanie prędkości
takiego jak powyżej używany i musimy go zmodyfikować. O tym jak to zrobić dowiecie się
jeszcze w tym semestrze.
Pojęcie układu inercjalnego. Sens tego sformułowania. (patrz wykład)
Zasada bezwładności - pierwsza zasada dynamiki
Poniżej podane jest sformułowanie pierwszej zasady dynamiki często spotykane w
podręcznikach do Fizyki do szkół średnich:
Jeśli na ciało nie działa żadna siła lub działają siły równoważące się to pozostaje ono w
spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
Nie jest ona błędna, ale nie wynika z niej jasno, co konkretnie dzieje się na przykład z
obiektem, na który działają siły równoważące się. Według powyższego sformułowania jest
nieruchomy albo porusza się ruchem jednostajnym, a to nie jest rzecz do wyboru.
Sformułowanie Newtona jest następujące:
Każde ciało pozostaje w spoczynku albo w stanie ruchu jednostajnego prostoliniowego,
dopóki oddziaływanie ze strony innych ciał nie zmieni tego stanu.
Widać, że obiekt robi dalej to co robił dopóki nie będzie czegoś (oddziaływania ze strony
innych ciał) co ten stan zmieni. Czyli jeśli pozostawał w spoczynku to nadal tak będzie, a
gdy poruszał się ruchem jednostajnym prostoliniowym to nadal tak będzie robił aż do
czasu gdy pojawi się działająca na niego niezrównoważona siła.
Matematyczny zapis dla obiektu o masie m: v=const, czyli a = 0 lub mv = const.
Masa zapewnia tu ruch ciała pomimo braku siły (jeśli przedtem się ono poruszało).
Pierwszą zasadę dynamiki wyróżniamy ponieważ dzięki niej możemy wyróżnić grupę
inercjalnych układów odniesienia.
Można pierwszą zasadę dynamiki sformułować także następująco:
Obiekt obserwowany w inercjalnym układzie odniesienia nie zmieni swego stanu
samoistnie. Zmieni go tylko wtedy, gdy będzie na niego działała jakaś różna od zera
wypadkowa siła.
PRZEDMIOT DYNAMIKI
Dynamika opisuje ruch obiektów analizując jego przyczyny. Bada więc siły z jakimi
oddziałują na siebie elementy danego układu oraz działające na elementy układu siły
zewnętrzne i poprzez sformułowanie równań ruchu daje nam narzędzie do obliczenia toru
ruchu, prędkości i przyspieszeń poszczególnych elementów składowych tego układu. Można
historycznie podzielić dynamikę na nierelatywistyczną (v<<c) i relatywistyczną (prędkości
bliskie prędkości światła c).
Zasady dynamiki. - zostały sformułowane przez Isaaca Newtona. Zostały sformułowane na
podstawie obserwacji. Z ich przyjęcia wynika szereg wniosków: np. prawo zachowania pędu,
energii mechanicznej, zasada względności Galileusza.
Pojęcie masy bezwładnej - Jest to wielkość skalarna charakteryzująca dane ciało niezależnie
od położenia względem innych ciał. Jest ona miarą bezwładności ciała. Proszę sobie
przypomnieć co dzieje się jeśli taka sama stała siła będzie działała na dwa ciała i wywoła
różne skutki w postaci innych przyspieszeń. Ciało o mniejszym przyspieszeniu będzie miało
większą masę.
Pojęcie siły - Jest to wielkość wektorowa. Jest ona przyczyną zmiany ruchu (v - prędkości
ciała) lub odkształcenia (w przypadku obiektu rozciągłego-bryły).
(Są tu pewne powtórzenia dla zachowania kompletności zasad dynamiki 1,2 i 3)
Zasada bezwładności - pierwsza zasada dynamiki
Poniżej podane jest sformułowanie pierwszej zasady dynamiki często spotykane w
podręcznikach do Fizyki do szkół średnich:
Jeśli na ciało nie działa żadna siła lub działają siły równoważące się to pozostaje ono w
spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
Nie jest ona błędna, ale nie wynika z niej jasno, co konkretnie dzieje się na przykład z
obiektem, na który działają siły równoważące się. Według powyższego sformułowania jest
nieruchomy albo porusza się ruchem jednostajnym, a to nie jest rzecz do wyboru.
Sformułowanie przypisywane Newtonowi jest następujące:
Każde ciało pozostaje w spoczynku albo w stanie ruchu jednostajnego prostoliniowego,
dopóki oddziaływanie ze strony innych ciał nie zmieni tego stanu.
Widać, że obiekt robi dalej to co robił dopóki nie będzie czegoś (oddziaływania ze strony
innych ciał) co ten stan zmieni. Czyli jeśli pozostawał w spoczynku to nadal tak będzie, a
gdy poruszał się ruchem jednostajnym prostoliniowym to nadal tak będzie robił aż do
czasu gdy pojawi się działająca na niego niezrównoważona siła.
Matematyczny zapis dla obiektu o masie m: v=const, czyli a = 0 lub mv = const.
Masa zapewnia tu ruch ciała pomimo braku siły (jeśli przedtem się ono poruszało).
Pierwszą zasadę dynamiki wyróżniamy ponieważ dzięki niej możemy wyróżnić grupę
inercjalnych układów odniesienia.
Można pierwszą zasadę dynamiki sformułować także następująco:
Obiekt obserwowany w inercjalnym układzie odniesienia nie zmieni swego stanu
samoistnie. Zmieni go tylko wtedy, gdy będzie na niego działała jakaś różna od zera
wypadkowa siła.
Druga zasada dynamiki. Masa bezwładna.
Jeśli na ciało działa stała niezrównoważona siła to porusza się ono ruchem jednostajnie
przyspieszonym, z przyspieszeniem wprost proporcjonalnym do wartości tej siły.
Działając taką samą siłą na różne obiekty możemy stwierdzić, że ich przyspieszenia się
różnią. Wprowadzając wielkość skalarną m - masę można powiedzieć, że obiekt o większej
masie trudniej przyspieszyć. Masa jest miarą bezwładności ciała.
Zasada zachowania pędu dla układu n ciał – wynika z drugiej zasady dynamiki
Newtona. Jeśli wypadkowa siła zewnętrzna F = 0 = ma to przyspieszenie środka masy układu
jest wektorem zerowym i stąd pęd całkowity (liczony jako suma wektorów) układu n ciał jest
wektorem stałym.
Trzecia zasada dynamiki.
Konsekwencją jej stosowania jest założenie nieskończenie szybkiego rozchodzenia się
impulsów. Zakładamy, że każdej akcji towarzyszy natychmiastowa reakcja. Równa co do
wartości ale o przeciwnym zwrocie.
Problem: “Paradoks” konia i wozu ciągnących się z takimi samymi siłami. Czemu to się
porusza? Zawsze siły te są przyłożone do różnych ciał.
Patrz wykład: Siły zewnętrzne i wewnętrzne dla rozpatrywanego układu.
Równania ruchu - przykłady. (zagadnienie na ćwiczenia)
Odpowiedź : Kiedy v=const, a przyspieszenie całkowite a 0?
Jest to ruch po okręgu. Przyspieszenie styczne wynosi zero, bo prędkość ma stałą wartość,
natomiast normalne jest różne od zera ponieważ tor jest krzywoliniowy i promień krzywizny
jest tu stały i równy promieniowi okręgu.