MODELOWANIE INŻYNIERSKIE nr 48, ISSN 1896-771X
WPŁYW SPOSOBU ZMIANY KĄTA
NASTAWIENIA SKRZYDŁA
NA OBCIĄŻENIA AERODYNAMICZNE
Paweł Czekałowski, Krzysztof Sibilski
Instytut Inżynierii Lotniczej, Procesowej i Maszyn Energetycznych Politechniki Wrocławskiej
[email protected]
[email protected]
Streszczenie
Artykuł opisuje badania doświadczalne przeprowadzone w tunelu wodnym. Obiektem badawczym był
wyskalowany robot naśladujący ruch skrzydeł entomoptera. Urządzenie umożliwia dowolne modyfikowanie
sposobu ruchu skrzydeł. Celem pracy jest znalezienie optymalnego sposobu ruchu skrzydeł, który zapewni
najlepsze osiągi obiektowi rzeczywistemu. Doświadczenie polegało na pomiarze sił aerodynamicznych oraz
momentu obrotowego wygenerowanych przez robota. Na podstawie wyników możliwe jest wyznaczenie
potrzebnej mocy do lotu. Podczas eksperymentu zmianie ulegała kinematyka ruchu skrzydeł. Modyfikowany
był sposób zmian kąta nastawienia skrzydła. Parametrami była zarówno amplituda oscylacji, jak i średnie
położenie.
Słowa kluczowe: entomopter, aerodynamika trzepoczących skrzydeł
INFLUENCE OF ENTOMOPTERS WING MOTION
ON AERODYNAMICS LOADS
Summary
The article is about empirical investigation conducted in water tunnel. As object dynamically scaled robot,
that can imitate entomopters wing motion was used. The machine can perform various kinematics of motion.
The aim of work is to find optimal wing motion, which provides best performance of real entomopter. The idea
of experiment was to measure aerodynamic forces and torque generated by model. Busing on results it is
possible to calculate required power for flight. During tests trajectory of wing motion was changed. The way of
change of pitch angle was parameterized. Additionally flow field was analyzed using visualization.
Keywords: entomopter, flapping wings aerodynamics
1. WSTĘP
Kluczowym zagadnieniem, które należy rozwiązać,
aby możliwe było zbudowanie efektywnie działającego
obiektu latającego, jest zapewnienie na tyle małej
konsumpcji energii, aby możliwe było wykonanie
zadania. Na zapotrzebowanie na moc oprócz kształtu
skrzydła wpływa przede wszystkim sposób ruchu.
Poprzez odpowiedni ruch skrzydła możliwe jest
sterowanie
zjawiskami
aerodynamicznymi
występującymi wokół skrzydła. Ich poglądowy opis
można znaleźć w pozycjach literaturowych [1],[2].
Jak wykazały liczne dotychczasowe badania,
największy wpływ na generowane siły i momenty
wywiera wir krawędzi natarcia [3], [4].
Eksperyment jest próbą optymalizacji sposobu
ruchu skrzydeł entomoptera. Chodzi o to, aby znaleźć
najbardziej efektywną pod kątem energetycznym
trajektorię ruchu. Generowane siły aerodynamiczne
towarzyszące małym liczbom Reynoldsa cechują się
małą doskonałością, co oznacza, że generowana siła
oporu jest w stosunku do opływu z dużymi liczbami
19
WPŁYW SPOSOBU ZMIANY KĄTA NASTAWIENIA SKRZYDŁA NA OBCIĄŻENIA AERODYNAMICZNE
bardzo duża. Wykonywany ruch jest obrotowo
zwrotny, co oznacza, że siła oporu, przynajmniej
w pewnym stopniu, sama się równoważy podczas
jednego
okresu.
Różnicując
kąt
wychylenia
skrzydłapodczas ruchu w jedną oraz drugą stronę,
możliwe jest,że uda się częściowo wykorzystać siłę
oporu jako siłę unoszącą. Generowane siły
aerodynamiczne bardzo mocno zależą od kąta natarcia
skrzydła. Wzrostowi kąta natarcia do wartości 45o
(jeśli nie ma oderwania) towarzyszy wzrost siły nośnej,
jednocześnie rośnie w całym zakresie 0-90osiła oporu.
Sprawdzone zostały różne warianty zmiany kąta
nastawienia.
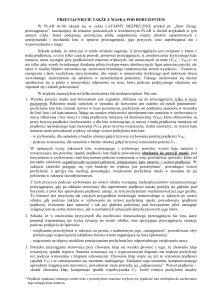
Definicje kątów Γprzedstawiono na rys. 1.
Narzucony dodatkowo został warunek ograniczający.
Kąt nastawienia w punktach zwrotnych (moment, gdy
zmienia się kierunek ruchu głównego) zawsze równy
jest 90o. W efekcie zmianie ulega kąt natarcia, pod
jakim jest skrzydło omywane w poszczególnych fazach
ruchu. Na podstawie tych dwóch parametrów oraz
dodatkowych warunków zbudowane zostały rodziny
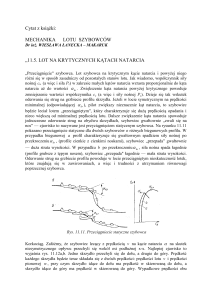
trajektorii ruchu trzepoczącego. Na rys. 3.
Przedstawiono przebiegi kąta nastawienia. Każda
krzywa sporządzona jest dla innej dewiacji. Rodziny
krzywych kąta γpowstały poprzez przeskalowanie.
Celem było zbadanie, jak zmiany amplitud
wychyleń zarówno w jedną, jak i drugą stronę,
wpływają
na
osiągi
projektowanego
obiektu.
Sprawdzono, jakiego zakresu poboru mocy należy się
spodziewać oraz jaką długotrwałość lotu można
uzyskać, wykorzystując do budowy dostępne
komponenty. Eksperyment był także próbą znalezienia
optymalnej amplitudy oscylacji kąta nastawienia,
a więc kąta natarcia. Sprawdzono, czy poprzez
wprowadzenie asymetrii ruchu poprawione zostaną
osiągi.
2. IDEA EKSPERYMENTU
I APARATURA BADAWCZA
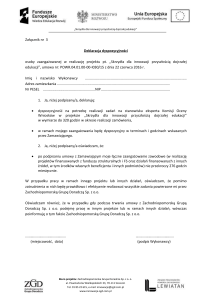
Eksperyment
polegał
na
pomiarze
sił
aerodynamicznych generowanych przez skrzydło
robota podczas ruchu trzepoczącego. Pomiarowi
podlegała siła normalna (skierowana zgodnie z osią
obrotu ruchu głównego), siła styczna (siła ortogonalna
do składowej normalnej, leżąca w płaszczyźnie
symetrii) oraz moment obrotowy w ruchu głównym.
Mierzone były siły i momenty tylko na jednym
skrzydle. Na podstawie znajomości momentu
obrotowego oraz prędkości obrotowej w każdym
punkcie czasu możliwe jest wyznaczenie mocy
potrzebnej do zrealizowania zadanego ruchu, a zatem
także przeanalizowanie osiągów. Na rys. 2.
przedstawiono robot wraz z wagą.Urządzenie składa
się z dwóch ramion, z których tylko jedno zawieszone
jest na wadze, drugie zapewnia warunek symetrii pola
prędkości wokół urządzenia. Urządzenie jest w stanie
obracać skrzydłem wokół trzech osi jednocześnie (ruch
trójwymiarowy), każde z ramion wyposażone jest
w trzy silniki. Szerszy opis układu pomiarowego
znajduje się w pozycjach [5],[6]. Podobne metody
badawcze są szeroko stosowanew pracach nad
podobnymi zagadnieniami ([7],[8],[9]).
Robot poruszał skrzydłami w każdym pomiarze
w inny sposób. Modyfikacji podlegał sposób zmiany
kąta nastawienia (γ), podczas gdy kinematyka ruchu
głównego
pozostawała
bez
zmian.
Jednym
z parametrów doświadczenia był całkowity zakres
ruchu skrzydła względem wspomnianego kąta:
Γ = Γ1 + Γ 2
Rys. 1. Trajektoria ruchu
(1)
Drugim był stosunek maksymalnych wychyleń
skrzydła w zakresie kąta nastawienia od pozycji
neutralnej 90o (dewiacja):
∆Γ =
Γ2
Γ1
Rys. 2. Robot trzepoczący
(2)
20
Paweł Czekałowski, Krzysztof Sibilski
wzoru Żukowskiego
cyrkulacji w czasie:
200
f
150
g=90/90
f,g
100
g=90/80
z
uwzględnieniem
zmiany
U ic, j ⋅ Γ p ic, j U is, j ⋅ Γ p is, j
∂ Γp i, j
∆ pi , j = ρ ⋅
+
+
by i , j
∂t 2
bx i , j
(6)
g=90/70
50
g=90/60
0
g=90/50
g=90/40
-50
g=90/30
0,2
0,4
0,6
0,8
1
t/T
Rys. 3. Trajektorie ruchu skrzydeł
3. MODEL PORÓWNAWCZY
a12
a 22
a 32
⋅⋅ ⋅
⋅⋅ ⋅
a m2
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ a1m Γp1 RHS1
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ a 2 m Γp 2 RHS 2
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ a 3 m Γp 2 RHS 3
=
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ a mm Γp m RHS m
(3)
r
r
1 r1k × r2k
1k
=
− 2k
a
r ⋅
i, j ∑
2 0i r
k =1 4π
r
r ×r
2k
1k
1k 2 k
Γpic, j
(
= (Γp
Γ pi , j
jest cyrkulacją ij panelu.
c
i, j
− Γpic−1, j
)
) dla reszty paneli,
Wizualizacja barwna polegała na wprowadzeniu
dwóch barwników, czerwonego i niebieskiego, do płynu
przez krawędź natarcia oraz spływu. Barwnik
wyprowadzany był przez krawędzie natarcia oraz
spływu, indykując odpowiednio wir krawędzi natarcia
(LEV) oraz ślad pozostawiany przez skrzydło (TEV).
Ten pierwszy pojawiał się przy kącie nastawienia ok.
30o. W przypadkach, gdy kąt natarcia spadał poniżej
(przypadki z dużymi amplitudami ruchu), wir zanikał,
po czym pojawiał się ponownie po przekroczeniu
wspomnianej granicy podczas zbliżania się do punktu
zwrotnego. W żadnym z przebadanych przypadków nie
zaobserwowano
oderwania
wiru.
Wizualizacja
jednoznacznie wykazuje promieniowy charakter
przepływu płynu przez wir. Nawiązując do
wcześniejszych badań nad fenomenem wiru krawędzi
natarcia, które wykazywały tendencję do zrywania się
wiru utworzonego na skrzydle lecącym na wprost
(lotem liniowym, a nie w ruchu obrotowym), tłumaczy
to jego stabilne zachowanie. Na rys. 6. widoczny jest
rozwijający się wir. Barwnik ruchem spiralnym
(zgodnym z wirem) przemieszcza się w stronę
końcówki skrzydła. Sposób zmiany kąta natarcia
(4)
Współczynniki po lewej stronie równania stanowią
prędkości generowane przez elementy wirowe
dla jednostkowej wartości cyrkulacji. Wyznaczane są
z prawa Biota – Savarta:
4
dla paneli u nasady
4. WYNIKI WIZUALIZACJI
Prawa strona równania stanowi warunek brzegowy.
Są to wartości składowych normalnych do paneli
prędkości ośrodka
RHSK = −Q∞ ⋅ nK
Γpis, j = Γpi , j
W dziedzinie czasu wykorzystana została
dyskretyzacja pierwszego rzędu.
Ślad wirowy za skrzydłem jest modelowany
poprzez
pozostawienie za krawędzią
natarcia
pierścienia wirowego. Model śladu jest w znacznej
mierze uproszczony. Nie jest modelowana jego
deformacja. Dodatkowo cyrkulacja jest zerowana po
każdym półcyklu. Metoda nie ma możliwości
odwzorowania zjawiska ssania krawędzi natarcia.
Program został zaimplementowany w środowisku
obliczeniowym Matlab. Tego typu metody są często
wykorzystywane w podobnych badaniach jako szybkie
narzędzie do szacowania sił aerodynamicznych, czego
przykładem są pozycje literaturowe [10] [11].
W celu wnikliwszej analizy opływ skrzydła robota
trzepoczącego został zamodelowany z zastosowaniem
jednej z metod potencjalnych: metody powierzchni
wirowej. Oczywiście model nie uwzględnia lepkości
ośrodka, nie jest możliwe przewidzenie separacji
opływu. Skrzydło dyskretyzowane jest za pomocą
zespołu pierścieni wirowych. Każdy cechuje się pewną
porcją wirowości. W środku każdego elementu
(przecięcie przekątnych) umieszczony zostaje punkt
kolokacji, w którym zapewniany jest warunek braku
przepływu. Zagadnienie sprowadza się do rozwiązania
równania macierzowego, w którym niewiadomą są
wartości cyrkulacji pierścieni
a11
a 21
a
31
⋅ ⋅⋅
⋅ ⋅⋅
a
m1
Γpic, j = Γpi , j dla paneli na krawędzi natarcia
Γpis, j = Γpi , j − Γpi , j −1
-100
0
gdzie:
(5)
Po wyznaczeniu cyrkulacji paneli możliwe jest
wyliczenie generowanej siły nośnej. Różnice ciśnień
generowane przez panele wyznaczane są za pomocą
21
WPŁYW SPOSOBU ZMIANY KĄTA NASTAWIENIA SKRZYDŁA NA OBCIĄŻENIA AERODYNAMICZNE
wpływał nie tylko na wspomniany wir. Przy niskich
kątach natarcia skrzydło „gubiło” dipole wirowe
(rys. 7), które w literaturze anglojęzycznej zwane są
„hairpins” z uwagi na ich kształt przypominający
spinkę do włosów. Ślad pozostawał dość długo
wyraźny. Przy wyższych kątach natarcia odrywały się
cyklicznie pojedyncze wiry, które szybko się
rozmywały.
sekundy ruchu. Skrzydło w tym momencie
przekroczyło punkt zwrotny i wykonuje ruch
powrotny. W bezpośrednim otoczeniu skrzydła jest nie
tylko ślad wirowy, ale także wir krawędzi natarcia.
Oznacza to, że przechodzi ono przez tę strukturę
wirową wygenerowaną w poprzednim półcyklu.
Oddziaływanie tej struktury wirowej powoduje
widoczne wahania. Model porównawczy nie jest
w stanie odtworzyć tego zjawiska, gdyż nie uwzględnia
istnienia wiru krawędzi natarcia. Jego istnienie
przejawia się w braku oderwania. Ponadto model śladu
wirowego jest w znacznej mierze uproszczony.
Po przekroczeniu punktu zwrotnego ślad jest zerowany
(stąd też w punktach zwrotnych mogą pojawiać się
skokowe zmiany wartości).
0,3
pomiar
0,25
vs
N [N]
0,2
0,15
0,1
0,05
0
-0,05
0
1
2
3
4
5
t [s]
Rys. 4.Struktury wirowe generowane przy dużych kątach
natarcia (u góry) oraz przy małych (na dole)
Rys. 5. Składowa normalna siły aerodynamicznej
0,5
5. WYNIKI POMIARÓW
pomiar
0,4
vs
0,3
S [N]
Zanim zaczęto analizę wpływu kinematyki ruchu
na osiągi, wyniki pomiarów porównano z obliczeniami.
Pozwoliło
to
na
głębszą
analizę
wyników
eksperymentu oraz wykluczenie ewentualnych błędów.
Dodatkowo pozwala to na jakościową ocenę
efektywności działania skrzydła, stwierdzenieobecności
oderwania wiru krawędzi natarcia, który ma
fundamentalne znaczenie dla generowania sił nośnej na
skrzydle przy bardzo dużych kątach natarcia.
Zaproponowany model nie pozwala na przewidzenie
tego typu zjawisk, więc jego obecność w doświadczeniu
podczas takiej analizy będzie dobrze wyeksponowana.
Z drugiej strony,sprawdzono w dużym zakresie
stosowalność metody obliczeniowej.
Porównanie przebiegów pokazuje dość dobrą
zbieżność wyników w zakresie siły normalnej. Na
rys. 5. przedstawiono porównanie siłynormalnej dla
trajektorii ruchu, w której zmiana kąta nastawienia
skrzydła jest symetryczna, a amplituda wynosi 45o.
Uzyskane wartości są bardzo zbliżone, szczególnie
w chwilach,
gdzie
osiągane
siły
są
duże.
W momentach, kiedy skrzydło generuje małą siłę, czyli
porusza się z małą prędkością, rozbieżności są znacznie
większe. Szczególnie widoczne to jest w okolicy trzeciej
0,2
0,1
0
-0,1
-0,2
0
1
2
t [s]
3
4
5
Rys. 6.Składowa styczna siły aerodynamicznej
W przypadku siły stycznej (rys. 6) porównanie
wypada znacznie gorzej. Metoda siatki wirowej
przewiduje znacznie większe maksymalne wartości sił.
Różnica wynosi 0,05N, czyli około 18% wartości
zmierzonej.
Porównanie
wyników
eksperymentalnych
i analitycznych umożliwia także jakościową analizę
zachodzących zjawisk. W obliczeniach zamodelowany
został opływ bez separacji, model jest wyidealizowany.
Skoro obliczona siła nośna dobrze pokrywa się
z doświadczeniem,
należy
wnioskować,
że
w doświadczeniu
nie
wystąpiło
oderwanie.
Eksperyment potwierdza istotną rolę fenomenu wiru
krawędzi
natarcia,
który
z
powodzeniem
wykorzystywany jest od dziesięcioleci w skrzydłach
delta. Wniosek ten zgadza się z obserwacjami
22
Paweł Czekałowski, Krzysztof Sibilski
wizualizacji opływu. We wszystkich porównaniach
obliczeń z pomiarami obserwowane były podobne
różnice.
Rys. 7. przedstawia aproksymację wyników
pomiarów wykonaną przy użyciu niezależnych sieci
neuronowych. Pokazano przykładowe (dla odchylenia
równego zero) przebiegi siły normalnej, stycznej. Na
jednej z osi poziomych znajduje się znormalizowany
czas, na drugiej względna wartość amplitudy wahań
kąta nastawienia. Zwiększenie zakresu ruchu, a więc
zmniejszanie kąta natarcia, powodowało wzrost
wartości siły w chwilach odpowiadających dużym
prędkościom kątowym skrzydła. Odwrotny efekt
uzyskiwany był w chwilach, w których prędkość była
relatywnie mała, czyli w okolicach punktów
zwrotnych. Uzyskiwane siły były większe. Przy dużych
amplitudach wartość siły była wyraźnie ujemna, wraz
ze spadkiem jej wartości siła stopniowo rosła.
W efekcie przebieg robił się bardziej płaski.
Maksymalna osiągnięta chwilowa wartość to 0.32N
podczas ruchu z największą amplitudą. Zmiany
stycznej składowej siły aerodynamicznej przejawiają
inny charakter. Zmniejszenie amplitudy oscylacji kąta
nastawienia skutkuje wzrostem amplitudy zmian siły
stycznej, więc także siły oporu, gdyż ta składowa siły
aerodynamicznej jest rzutem wektora siły oporu na
płaszczyznę symetrii robota. Prędkość skrzydła
w każdym przypadku zmieniała się w taki sam sposób.
Z tego też powodu moc niezbędna do ruchu wraz ze
zmianą amplitudy zmienia się podobnie jak siła
styczna.
Uśrednienie powyższych wyników pozwoliło
na jakościową ocenę efektów ruchu skrzydeł.
Na wykresach zawartych na rys. 8. przedstawiono
zmiany średnich wartości sił aerodynamicznych oraz
mocy niezbędnej do ruchu towarzyszące modyfikacjom
rozważanych parametrów.
Rys. 7.Przebiegi siły normalnej oraz stycznej dla ruchu
symetrycznego (dewiacja=1) w funkcji zmiany amplitudy
Jednoznacznie można powiedzieć, że wzrost
parametru nazwanego dewiacją kąta nastawienia
sprzyjał wzrostowi składowej siły normalnej.
Odwrotnie było w przypadku siły stycznej. Największą
wartość siły normalnej uzyskano dla najmniejszej
amplitudy i największej dewiacji, czyli dla
symetrycznego sposoby zmiany kąta nastawienia. Dla
mniejszych wartości dewiacji możliwe jest znalezienie
maksimum lokalnego, które lokuje się w okolicy 0.7-0.8
amplitudy względnej. Wartość średniej siły stycznej
rośnie wraz ze spadkiem dewiacji (zwiększeniem
asymetrii ruchu) oraz wzrostem amplitudy.
Teraz wyniki należy odnieść do obiektu
rzeczywistego.
Podstawowym
kryterium
wartościującym efektywność układu napędowego, czy
też, jak w tym przypadku sposobu ruchu skrzydeł, jest
moc niezbędnado wykonania tego ruchu odniesiona do
wygenerowanej siły. Należy przeliczyć, jaki jest pobór
mocy obiektu o założonych we wstępie parametrach
(waga, rozpiętość). W pierwszej kolejności uzyskane
wyniki trzeba sprowadzić do postaci bezwymiarowych.
Siłę nośną wyrazić można, korzystając ze wzoru
Newtona:
1
L = C L ⋅ ρ ⋅U 2 ⋅ S
2
(7)
Skrzydło nie jest omywane ze stałą prędkością (jest to
obrót), więc należy scałkować iloczyn współczynnika
23
WPŁYW SPOSOBU ZMIANY KĄTA NASTAWIENIA SKRZYDŁA NA OBCIĄŻENIA AERODYNAMICZNE
siły
nośnej,
kwadratu
prędkości
oraz
cięciwy.Zakładając, że chcemy znaleźć średnią wartość
współczynnika
dla
całego
skrzydła,
można
go wyciągnąć przed znak całki.
R
W wyniku całkowania po rozpiętości otrzymana
zostanie moc całego skrzydła:
R
P = 4 ρ ⋅ (πf ) ⋅ C d ⋅ ∫ r 3 c( y ) ⋅ dy
3
(13)
0
R
1
ρ ⋅ 4π 2 f 2 ∫ CL ( y) ⋅ r 2 ⋅ c( y) ⋅ dy = 2ρπ 2 f 2 CL ∫ ⋅ r 2 ⋅ c( y) ⋅ dy (8)
2
0
0
Teraz możliwe jest wyznaczenie współczynnika siły
oporu, który tożsamy będzie ze współczynnikiem
mocy:
Cd =
p
(14)
R
4ρ ⋅ (πf ) ⋅ ∫ r c( y ) ⋅ dy
3
3
0
Wstawiając do wyrażenia (9) zakładany ciężar
obiektu i odpowiednie cechy geometryczne, można
wyznaczyć częstotliwość trzepotania:
L
1
2
fa =
⋅
4
2Φ 1
Ra
C L ⋅ ρ a ⋅ int L
R
2
0.5
(15)
Wartości przedstawione zostały na rys 8.
Częstotliwość trzepotania zmienia się pomiędzy
12 i 16Hz. Dla określonych parametrów ruchu istnieje
minimum wartości częstotliwości.
Korzystając teraz z odpowiednio przekształconego
wyrażenia (12), wyznaczono moc niezbędną do
zasilenia obiektu rzeczywistego:
ρ
Pa = 2 ⋅ P ⋅
ρa
Rys. 8. Średnie wartości sił
W efekcie wzór na bezwymiarową wartość siły
nośnej(współczynnik) można wyrazić następująco:
CL =
2 ρπ f
2
R
2
∫ ⋅ r ⋅ c( y ) ⋅ dy
2
0
W przypadku zawisu siła nośna będzie
geometryczną sumą składowych stycznej i normalnej
siły zmierzonej.Analogicznie można rozpisać siłę oporu.
Dla elementarnego pasa będzie ona równa:
d ( y) =
1 2
1
ρv Cd ⋅ c( y ) ⋅ dy = ρ ⋅ (r ⋅ ω )2 ⋅ Cd ⋅ c( y ) ⋅ dy (10)
2
2
Przemnażając powyższe równanie przez prędkość,
wyrażoną
U = r ⋅ω
(11)
uzyskana zostanie moc:
1
3
p( y ) = ρ ⋅ (r ⋅ ω ) ⋅ Cd ⋅ c( y ) ⋅ dy =
2
1
3
= ρ ⋅ (2πf ) ⋅ Cd ⋅ c( y ) ⋅ dy ⋅ r 3
2
0.5
3
L 2 R
⋅ a ⋅
2 L Ra
(16)
Ta z kolei przedstawiana została na rys. 9.
Względem amplitudy powierzchnia zachowuje się
hiperbolicznie. Zmiany względem dewiacji zbliżone są
do zależności liniowej. Przy dużych amplitudach
asymetria zmiany kąta nastawienia (dewiacja) miała
niewielkie znaczenie. Jej wpływ stawał się coraz
wyraźniejszy wraz ze spadkiem amplitudy oscylacji.
Im większa dewiacja, tym sposób ruchu był mniej
efektywny.
Można również założyć, że składowa styczna siły
aerodynamicznej będzie wykorzystana podczas obu
półcykli. Siła styczna w trakcie cyklu nie będzie się
znosić. W tym przypadku zakłada się, że płaszczyzna
trzepotania będzie odchylana w taki sposób, aby
chwilowy wypadkowy wektor siły nośnej był zawsze
skierowany do góry. Jest to przypadek, w którym
energia
zostanie
wykorzystana
najefektywniej.Wykorzystując
powyższy
tok
obliczeniowy, można jeszcze raz stworzyć mapę
zapotrzebowania na moc.
(9)
L
(12)
24
Paweł Czekałowski, Krzysztof Sibilski
Rys. 9.Niezbędna częstotliwość trzepotania
Rys. 11. Niezbędna częstotliwość trzepotania przy
całkowitym wykorzystaniu sił aerodynamicznych
Rys. 10. Pobór mocy entomoptera
Rys. 12.Pobór mocy entomoptera przy całkowitym
wykorzystaniu sił aerodynamicznych
Powierzchnię
przedstawiającą
częstotliwość
(rys. 10.) trzepotania potrzebną do wykonania zawisu
wraz ze zmianą parametrów kinematyki ruchu
skrzydła układa się wokół płaszczyzny rosnącej mocno
wraz amplitudą zmiany kąta nastawienia i znacznie
łagodniej wraz z wartością dewiacji. Generalnie
wyznaczone wartości dla takiego lotu są niższe, bo
zmieniają się w zakresie 9 - 13Hz.
Wartości
prognozowanego poboru mocy (rys. 11.) osiągane
w porównaniu z przypadkiem poprzednim są nawet
kilkukrotnie mniejsze. Mniejsze są również różnice
pomiędzy punktami pomiarowymi. Gdyby wygładzić
uzyskaną powierzchnię, okazałoby się, że pobór mocy
rośnie wraz z wartością amplitudy. Trend powierzchni
jest odwrotny. Najlepsza efektywność uzyskana została
przy małych amplitudach, a wartość poboru mocy
wyniosła 0,4W.
Rys. 13.Komponenty układu napędowego
Sama wartość zapotrzebowania na moc nie określa
jakości obiektu. Do oceny potrzebny jest punkt
odniesienia. Takim może być moc indukowana,
wyznaczona na podstawie zasady zachowania pędu.
Jest to moc, która przekazywana jest strudze
przepływającej przez tarczę wirnika (w przypadku
entomoptera średnią płaszczyznę ruchu). Jednocześnie
jest to minimalna moc potrzebna do wygenerowania
założonej siły nośnej. Końcowy wzór wyrażający moc
indukowaną przedstawia się następująco:
Pa =
L3a/ 2
2⋅ ρ ⋅ A
(17)
Do powyższego wzoru podstawionozałożoną siłę
nośną obiektu oraz pole średniej płaszczyzny ruchu
skrzydeł. Wyznaczonaw ten sposób moc wyniesie
0,114W. Stanowi to niespełna 30 % minimalnej
wartości uzyskanej na podstawie pomiarów.
Wiedza na temat zapotrzebowania na moc
umożliwiła
dobranie
komponentów
układu
25
WPŁYW SPOSOBU ZMIANY KĄTA NASTAWIENIA SKRZYDŁA NA OBCIĄŻENIA AERODYNAMICZNE
napędowego.
Elementy
wraz
ich
masami
przedstawiono na rys. 13. Jako napęd wykorzystany
zostanie silnik trójfazowy (po lewej) współpracujący
z regulatorem (środkowa część ilustracji). Jako źródło
energii wykorzystana zostanie pojedyncza cela LiPo
o pojemności 70mAh. Sumaryczna masa elementów
stanowi niespełna 50% założonej masy obiektu, co
umożliwia ich realne wykorzystanie.Długotrwałość lotu
może być wyznaczona na podstawie prawa Joule’aLenza. Przyjmując wartość zapotrzebowaniana moc na
poziomie
P=0,45W,
pojemność
akumulatora
cap=70mAh oraz sprawność systemu napędowego na
poziomie 70%, długotrwałość lotu wyniesie:
t=
U c ⋅ cap ⋅η
= 24 min
P
układu napędowego. Samo utrzymanie płaszczyzny
trzepotania nieruchomo jest dość problematyczne,
zważywszy
na
okresowo
zmienny
charakter
generowanych sił i momentów. Taka sytuacja nie jest
też, jak się okazało, najlepsza. Efektywniej
jestutrzymywać
wypadkowy
wektor
siły
aerodynamicznej przeciwnie do wektora grawitacji.
Wymaga to pochylania płaszczyzny trzepotania. Pobór
mocy jest jednak w każdej sytuacji mniejszy, dla
niektórych
przypadków
nawet
kilkukrotnie.
Najefektywniejsze sposoby ruchu cechowały się
relatywnie małymi amplitudami zmiany kąta
nastawienia, co z technicznego punktu widzenia jest
korzystne.
(18)
Opisane powyżej badania stanowią część projektu
rozwojowego finansowanego przez Narodowe Centrum
Badań i Rozwoju.
6. WNIOSKI
7. Wykaz oznaczeń
Porównanie
zmierzonych
przebiegów
sił
z wynikami obliczeń metodą pierścieni wirowych
pozwoliło sprawdzić obecność oderwania wiru krawędzi
natarcia. Okazało się, że pomimo bardzo dużych kątów
natarcia oderwanie nie występuje. Skrzydło działa
poprawnie w każdym zakresie. Z drugiej strony
pozwoliło to na sprawdzenie skuteczności metody
obliczeniowej. Algorytm nieźle przewiduje siłę nośną
(składową normalną siły aerodynamicznej), natomiast
siła oporu, którą reprezentowała w doświadczeniu
składowa styczna, była przeszacowywana. Rozbieżność
ta spowodowana jest zbyt dużym uproszczeniem
modelu fizycznego zjawiska. Siła nośna jest
stosunkowo łatwa do przewidzenia, zważywszy na
wirowy mechanizm jej generacji. Siła oporu ma
charakter bardziej złożony, w grę wchodzątakże
zjawiska związane z lepkością ośrodka.
Eksperyment dostarczył wielu informacji na temat
możliwości
efektywnego
wykorzystania
mocy
w napędzie trzepoczącym. Na podstawie wyników
okazało się, jakiej długotrwałości lotu można się
spodziewać po rzeczywistym obiekcie. Nie udało się
znaleźć konkretnego optymalnego sposoburuchu
w sensie definicji. Można jednak określić przedział
parametrów, w których moc była najmniejsza, czyli
układ jest najbardziej efektywny. W pierwszym
przypadku, gdy płaszczyzna trzepotania byłaby
podczas lotu utrzymywana w stałym położeniu
kątowym, najefektywniejsze sposoby ruchu były te
z dużymi amplitudami. Dewiacja wywierała znikomy
wpływ na średni pobór mocy. Duże amplitudy mogą
jednak przysparzać dużych trudności z realizacją
napędu. O ile małe amplitudy ruchu można realizować
w sposób pasywny, tzn. skrzydło jest obracane poprzez
siły masowe i aerodynamiczne, o tyle amplitudy ruchu
niewiele mniejsze od 90o będą wymagały dodatkowego
aij – jednostkowe wartości cyrkulacji w modelu
pierścieni wirowych
c –długośćcięciwy skrzydła
bx, by – długości boków panelu
f – częstotliwość trzepotania robota
fa – częstotliwość trzepotania entomoptera
r – odległość od środka obrotu skrzydła
p – ciśnienie
t – czas lotu
A – pole powierzchni średniej płaszczyzny ruchu
CD, CL – współczynniki siły oporu oraz siły nośnej
D – siła oporu
L – siła nośna generowana przez robot
La – siła nośna generowana przez entomopter
N – składowa normalna siły aerodynamicznej
R – maksymalny promień skrzydła robota
Ra – maksymalny promień skrzydła entomoptera
P – moc pobierana przez robot w tunelu wodnym
Pa – moc pobierana przez entomopter
T – składowa styczna siły aerodynamicznej
U– prędkość opływu
Uc – napięcie akumulatora
S – pole powierzchni skrzydła
Gp-cyrkulacja pierścienia
G-Całkowity zakres zmiany kąta nastawienia
F-Całkowity zakres zmiany kąta azymutalnego
ρ-gęstość ośrodka
f-położenie skrzydła w zakresie kąta azymutalnego
g-położenie skrzydła w zakresie kąta nastawienia
h-sprawność układu transmisji napędu
w-prędkość obrotowa skrzydła
R
int L = ∫ r 2 ⋅ c(r ) ⋅ dr – cecha geometryczna skrzydła
0
26
Paweł Czekałowski, Krzysztof Sibilski
Literatura
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
Shyy, W., Lian, Y., Tang, J., Vheru, D., Liu, H.: Aerodynamics of low Reynolds number flyers.
Cambridge: Cambridge University Press, 2008.
Sane S.P., Dickinson M.H.: The control and flight force by a flapping wing: lift and drag production.
“Journal of Experimental Biology” 2001, Vol.204, p. 2607 – 2626.
Birch J.M., Dickson W.B., Dickinson M.H.: Force production and flow structure of the leading edge vortex
on flapping wings at high and low Reynolds numbers. “Journal of Experimental Biology” 2004, Vol. 207,
p. 1063 – 1072.
Van den Berg C., Ellington C. P.:The three–dimensional leading–edge vortex of a ‘hovering’ model
hawkmoth. “Philosophical Transactions of the Royal Society” 1997, Vol. 352, p. 329 – 340.
Czekałowski P.,Sibilski K.: Water tunnel experimental investigation on the aerodynamic performance
of flapping wings for nano air vehicles. AIAA 2011, online proc. 2011-3789.
Rolling Hills Research Corporation, “Research water tunnel specification”, El Segundo, California,
www.rollinghillsresearch.com, 2009.
Unsteady Aerodynamics for Micro Air Vehicles. AC/323(AVT-149)TP/332 2010, www.rto.nato.int
Ol M.V. (ed.).: Unsteady low Reynolds number aerodynamics for micro air vehicles (MAVs). Air Force
Research Laboratory 2010, AFRL-RB-WP-TR-2010-3013.
Jong-seob Han and Jo Won Chang.: Flow “Visualization and Force Measurement of an Insect based
Flapping Wing” 4 - 7 January 2010 AIAA 2010-66, Orlando, Florida.
Ghommem M.: Modeling and analysis for optimization of unsteady aeroelastic Systems. PhD, Blacksburg,
Virginia 2011.
Lasek M., Sibilski K., Pietrucha J.,Złocka M.: Modelowanie dynamiki lotu ornitoptera. Raport
merytoryczny projektu nr 9T12C00418. Warszawa: Pol. Warsz., 2003.
27