")
UNIWERSYTET
ZIELONOGÓRSKI
WYDZIAŁ ELEKTROTECHNIKI, INFORMATYKI I TELEKOMUNIKACJI
INSTYTUT INŻYNIERII ELEKTRYCZNEJ
PRACA DYPLOMOWA INŻYNIERSKA
Współpraca sterowników PLC
z czujnikami pomiarowymi
Pracę wykonał:
Marcin Wieczorek
Nr albumu :
Prowadzący:
dr inż. Grzegorz Kobyłecki
Zielona Góra, Wrzesień 2004
SPIS TREŚCI
1. Wstęp..................................................................................................................
1.1 Wprowadzenie.................................................................................................................
1.2. Cel i zakres pracy............................................................................................................
2. Ogólne wiadomości na temat sterowników PLC.......................................
3. Przegląd sterowników PLC...............................................................................
2.1. Sterownik typu GE FANUC.........................................................................
2.2. Sterownik typu SIEMENS............................................................................
2.3. Sterownik typu ALLEY BRADLEY............................................................
2.4. Sterownik typu SCHNEIDER.......................................................................
4. Zastosowanie czujników pomiarowych w systemach ze sterownikami PLC
3.1. Pomiar prędkości obrotowej...................................................................
3.2. Pomiar temperatury................................................................................
3.3. Pomiar wielkości elektrycznych............................................................
3.4. Inne czujniki specjalne...........................................................................
5.Stanowisko laboratoryjne do badania czujników temperatury........................
4.1. Założenia.................................................................................................
4.2. Stanowisko laboratoryjne........................................................................
4.3. Oprogramowanie sterownika..................................................................
4.4. Wizualizacja.............................................................................................
6. Podsumowanie i wnioski końcowe...................................................................
7. Literatura i załączniki...........................................................................................
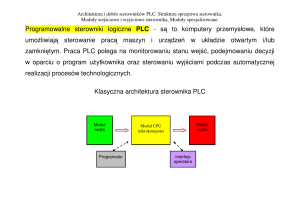
1. Wstęp
Programowalne sterowniki logiczne (PLC ang. Programmable Logic Controllers),
nazywane także sterownikami programowalnymi, należą do szeroko rozumianej
rodziny komputerów. Wykorzystywane są głównie w zastosowaniach
przemysłowych. Praca PLC polega na monitorowaniu wejść analogowych i
cyfrowych, podejmowaniu decyzji w oparciu o program (algorytm działania)
użytkownika oraz odpowiednim sterowaniu wyjściami
Sterowniki swobodnie programowalne (PLC) coraz częściej wyposażone są
W przetworniki analogowo-cyfrowe oraz cyfrowo-analogowe. Umożliwia to
Połączenie sterowania procesem dyskretnym z regulacją wielkości ciągłych.
Zintegrowanie w jednym urządzeniu funkcji sterownika PLC i regulatora wymaga
jednak spełnienia szeregu wymagań wynikających z odmiennego charakteru
pracy obu tych urządzeń.
Sterowniki (PLC) stają się obecnie najczęściej stosowanym mikroprocesorowym
urządzeniem automatyki. Moc obliczeniowa stosowanych w nich systemów
mikroprocesorowych jest znaczna i dlatego obserwuje się stałe rozszerzanie
funkcji sterowników PLC.
Urządzenia te, zasadniczo przeznaczone do programowej realizacji układów
przełączających z uzależnieniami czasowymi oraz ilościowymi.
Odzwierciedla to struktura ich programowania stałego (systemowego).
Oprogramowanie stałe sterownika PLC powinno ułatwiać realizację takich
Zadań – typowych dla sterowania procesem produkcyjnym – jak np.:
Normalne (technologiczne) uruchomienie układu
Automatyczny restart po powrocie napięcia zasilania
Obsługa normalnego (technologicznego) wyłączania
Obsługa awaryjnego wyłączania wywołanego zanikiem napięcia zasilania
Obsługa awaryjnego wyłączania wywołanego zdarzeniami procesowymi
Natychmiastowe reakcje na wybrane zdarzenia zewnętrzne
Reagowanie na zawieszenie sterownika
2 Ogólne wiadomości na temat sterowników PLC
Podstawowe bloki funkcjonalne programowanego sterownika
logicznego PLC.
Sterowniki PLC zbudowane są z: modułów wejściowych, jednostki centralnej
(CPU) oraz modułów wyjściowych.
Wejścia PLC akceptują różne sygnały wejściowe, cyfrowe lub analogowe;
pochodzące z zewnętrznych urządzeń (czujników) przetwarzane następnie do
postaci sygnałów logicznych, które stają się zrozumiale dla CPU.
Jednostka CPU podejmuje decyzje i wykonuje funkcje sterowania bazując na
instrukcjach programowych zawartych w pamięci. Moduły wyjściowe
przetwarzają funkcje sterowania z CPU do takiej postaci sygnałów
(cyfrowych lub analogowych), jakich wymaga aplikacja.
Instrukcje programowe określają, co powinien wykonać PLC przy
określonym stanie wejść i w danej sytuacji.
Dodatkowy interfejs operatorski (pulpit sterowniczy) umożliwia wyświetlanie
informacji o realizowanym procesie sterowania i wprowadzanie nowych
parametrów kontrolnych.
Podstawowe parametry programowanych sterowników logicznych PLC.
- wymiary
- maks. liczba we/wy cyfrowych oraz analogowych
- maks. pamięć programu
- maksymalna ilość dołączanych modułów
- interfejsy umożliwiające rozszerzenie (np. IM365 lub IM360/361)
- moc obliczeniowa CPU
- protokół komunikacyjny z innymi elementami systemu (np. MPI,
PROFIBUS, Ethernet)
- czas wykonania instrukcji
- interfejsy do systemów IT i sieci WWW
- zakres temperatur pracy
- rodzaj szyny na której montowany jest sterownik
- możliwości programowania (obsługiwane języki programowania: FBD,
SFC)
- odporność mechaniczna
Pamięci danych i programu w programowanych sterownikach
logicznych.
W pamięci sterownika wyodrębniona jest pewna ilość miejsca do przechowywania
chwilowych wyników operacji. W sterownikach PLC rozróżniamy 4 tryby
adresowania: bitowo, bajtowo, wyrazowo oraz przy pomocy dwóch słów.
Adresując słownie operujemy na 16-tu bitach i przy pomocy dwóch słów na 32-ch
bitach.
Pamięć w sterowniku służy do przechowywania programu oraz informacji
pośrednich, powstających w trakcie jego wykonywania. Jest to pamięć typu RAM,
nieulotna np. EPROM lub EEPROM. Podział pamięci na pamięć operacyjną i
pamięć programu nie jest sztywny. Najczęściej w trakcie uruchamiania i
testowania, program jest zapisywany w pamięci operacyjnej RAM. Ostateczna
jego wersja może być tam pozostawiona albo zapisana na “trwałe” w pamięci
stałej.
Układy wejścia i wyjścia programowanych sterowników logicznych.
Wejście dyskretne – określane także mianem: „wejścia cyfrowego”, może
znajdować się w jednym z dwóch stanów: załączone (ON) lub wyłączone (OFF).
Przyciski,
przełączniki
dwustanowe, wyłączniki
krańcowe
oraz
czujniki
zbliżeniowe to przykłady czujników dyskretnych, które są podłączane do
dyskretnych (cyfrowych) wejść sterowników. W stanie załączenia (ON) dyskretne
wejście odpowiada logicznej jedynce lub stanowi wysokiemu. W stanie
wyłączenia (OFF) dyskretne wejście odpowiada logicznemu zeru lub stanowi
niskiemu. Wiele sterowników wymaga oddzielnego zasilacza dla zasilania wejść.
W stanie otwartym na wejściu PLC nie występuje napięcie. Jest to stan wyłączenia
(OFF). Kiedy przycisk zostaje wciśnięty, napięcie np.: 24VDC zostaje dołączone
do wejścia PLC. Jest to stan załączenia (ON).
Wyjście dyskretne – jest wyjściem, które może być włączone (ON) lub wy
łączone (OFF). Zamieniają sygnały binarne sterownika na sygnały prądu stałego
lub przemiennego potrzebne do wysterowania urządzeń wyjściowych. Cewki
przekaźników oraz lampki to przykładowe urządzenia wykonawcze podłączane do
wyjść dyskretnych. Wyjścia dyskretne mogą być również nazywane wyjściami
cyfrowymi.
Wejście analogowe – to wejście, do którego podłącza się sygnał ciągły. Typowe
wejścia analogowe różnią się właściwościami. np. mogą być przystosowane do
pomiaru prądu (spotykane zakresy to 0..20mA oraz 4..20mA) lub napięcia (np.
0..10V).
Wyjście analogowe – jest wyjściem, na którym jest generowany sygnał ciągły w
czasie. Na wyjściu może być wytwarzany np. sygnał napięciowy zakresu
0..10VDC, który steruje wskaźnikiem analogowym (wychyłowym). Przykładowo,
do wyjść analogowych są dołączane wskaźniki prędkości, ciężaru i temperatury.
Sygnał wyjściowy może być również używany przy bardziej złożonych
zastosowaniach, takich jak np. zamiana prądu na ciśnienie, które reguluje
pneumatycznym zaworem przepływu itp.
Budowa i parametry dwustanowych układów wejścia sterowników
logicznych.
Najprostsze w działaniu czujniki dwustanowe taki jak: przyciski, przełączniki i
styki, mogą mieć zestyki zwarte w stanie czuwania (NC) lub rozwarte (NO).
Wejścia dyskretne, nazywane również wejściami cyfrowymi (ang. digital inputs)
zamieniają pochodzące z urządzeń (przyciski, przełączniki, wyłączniki krańcowe,
etc.) sygnały prądu stałego lub przemiennego na sygnały logiczne (dwustanowe)
akceptowane przez sterownik.
W produkowanych obecnie sterownikach do takiej zamiany wykorzystywany jest
zazwyczaj przetwornik optyczny, zapewniający dodatkowo optoizolację pomiędzy
obwodami wejściowymi a magistralą sterownika (patrz rys. 4.3). W przypadku
wejść prądu stałego polaryzacja źródła zasilania obwodów wejściowych zależy od
typu zastosowanego układu wejściowego:
-
ujście (ang. SINK IN) tzn. z polaryzacją dodatnią (patrz rys. 4.3 a) nazywane
układami o logice dodatniej (najczęściej spotykane),
-
źródło (ang. SOURCE IN) tzn. z polaryzacją ujemną (patrz rys. 4.3 b)
nazywane układami o logice ujemnej.
W zależności od typu i wykonania sterownika dwustanowe sygnały wejściowe
mogą mieć postać sygnałów napięciowych prądu stałego lub przemiennego
o wartości “1”od 5V do 220V (najbardziej rozpowszechnione jest 24V).
Budowa i parametry dwustanowych układów wyjścia sterowników
logicznych
Wyjścia dyskretne, nazywane również wyjściami cyfrowymi (ang. digital
outputs) zamieniają sygnały binarne sterownika na sygnały prądu stałego lub
przemiennego potrzebne do wysterowania urządzeń wyjściowych (cewki
styczników, lampki kontrolne, etc.).
Zamiany tych sygnałów dokonuje się poprzez zamykanie lub otwieranie zasilanych
z zewnętrznego źródła obwodów wyjściowych za pomocą przekaźników (wyjścia
przekaźnikowe, ang. Relay Output ) lub łączników tranzystorowych (wyjście
„napięciowe”).
W przypadku obwodów wyjściowych z łącznikami tranzystorowymi istnieją dwa
rozwiązania (podobnie jak w przypadku wejść prądu stałego):
- źródło (ang. SOURCE OUT) - najczęściej spotykane
- ujście (ang. SINK OUT)
Budowa i parametry analogowych układów wejścia sterowników logicznych.
Zamieniają pochodzące z czujników sygnały analogowe (ciągłe) na sygnały
cyfrowe. Konwersja tych sygnałów realizowana jest za pomocą przetworników
analogowo-cyfrowych ADC (ang. Analog to Digital Converter).
Parametrami charakteryzującymi przetworniki ADC i DAC są:
-
zakres napięć wejściowych/wyjściowych (najczęściej 10 V),
-
rozdzielczość – napięcie przypadające na najmniej znaczący bit przetwornika,
-
czas przetwarzania,
-
częstotliwość przetwarzania.
Budowa i działanie analogowych układów wyjścia sterowników logicznych.
Zamieniają sygnały cyfrowe na sygnały ciągłe sterujące urządzeniami
wykonawczymi. Konwersja tych sygnałów realizowana jest za pomocą
przetworników cyfrowo-analogowych DAC (ang. Digital to Analog Converter).
Parametrami charakteryzującymi przetworniki ADC i DAC są:
-
zakres napięć wejściowych/wyjściowych (najczęściej 10 V),
-
rozdzielczość – napięcie przypadające na najmniej znaczący bit przetwornika,
-
czas przetwarzania,
-
częstotliwość przetwarzania.
Norma IEC 1131-3 dla programowanych sterowników logicznych.
Norma IEC 1131 składa się z pięciu części:
- Informacje ogólne,
- Sprzęt i wymagania testowe,
- Języki programowania,
- Wytyczne użytkownika,
- Wymiana informacji.
Część trzecia normy, IEC 1131-3, dotyczy języków programowania i stanowi jej
najważniejszą część. Przede wszystkim dzięki niej ujednolicono koncepcję
programowania PLC tak, aby w oparciu o wprowadzone zasady, użytkownik był w
stanie programować bez większych trudności różne systemy PLC.
W części trzeciej normy IEC 1131 zostały zdefiniowane pojęcia podstawowe,
zasady ogólne, model programowy i komunikacyjny oraz podstawowe typy i
struktury danych. Określono w niej dwie grupy języków programowania: języki
tekstowe i graficzne.
W grupie języków tekstowych zdefiniowane zostały następujące języki:
- Język listy instrukcji IL (Instruction List), będący odpowiednikiem
języka typu assembler
- Język strukturalny ST (Structured Text), który jest odpowiednikiem
języka algorytmicznego wysokiego poziomu
Do grupy języków graficznych opisanych w normie IEC 1131-3 należą:
- Język schematów drabinkowych LD (Ladder Diagram), podobny do
stykowych obwodów przekaźnikowych
- Język schematów blokowych FBD (Function Block Diagram), będący
odpowiednikiem schematów przepływu sygnału dla obwodów logicznych
przedstawionych w formie połączonych bramek logicznych oraz bloków
funkcyjnych takich jak w języku LD.
W normie IEC 1131-3 przedstawiono także sposób tworzenia struktury
wewnętrznej programu w postaci grafu sekwencji SFC (Sequential Function
Chart), który pozwala na opisywanie zadań sterowania sekwencyjnego za pomocą
grafów zawierających etapy (kroki) i warunki przejścia (tranzycji) między tymi
etapami.
Języki programowania sterowników logicznych.
Program składa się z jednej lub kilku instrukcji, które realizują zadanie.
Programowanie sterowników polega na konstruowaniu zestawów prostych
instrukcji.
Języki tekstowe:
Język listy instrukcji IL (Instruction List), będący odpowiednikiem języka
typu assembler
Język listy instrukcji IL składa się z sekwencji instrukcji, z których każda
powinna zaczynać się w nowej linii. Instrukcja powinna zawierać nazwę
operatora z ewentualnymi modyfikatorami oraz operand (jeden lub więcej,
oddzielone przecinkami, w zależności od wymagań operatora). Operandami
mogą być stałe lub zmienne.
Przykład:
add
1
st
counter
dodawanie 1
Przesłanie wartości wyniku bieżącego
do operandu
Język STL, będący językiem mnemonicznym, o strukturze podobnej do
wewnętrznego języka mikroprocesorów (asemblera).
Język ten pozwala wykorzystać wszystkie zasoby sterownika poprzez dostęp
do wszystkich jego rejestrów (pozwala na użycie funkcji i instrukcji
niedostępnych w innych językach). Instrukcja jest dla PLC rozkazem do
natychmiastowej realizacji. Lista instrukcji STL określa sposób i działanie
sterownika.
Tworzenie programu sterującego PLC z wykorzystaniem listy instrukcji STL
polega na używaniu właściwych tej metodzie rozkazów, wynikających z
konfiguracji sterownika i za pomocą reguł programowania sterownika
umieszczaniu ich we właściwych miejscach edytora programu wraz z
operandami.
Język strukturalny ST (Structured Text), który jest odpowiednikiem języka
algorytmicznego wysokiego poziomu
Podstawowymi elementami tego języka są wyrażenia i polecenia. Wyrażenie
stanowi element języka, który z chwilą wykonania dostarcza wartość
odpowiadającą jednemu z typów danych. Wyrażenie składa się z operatorów
i operandów. Operandem może być zmienna, stała, wywoływana funkcja
lub inne wyrażenia.
Przykład:
if trigger.q then
counter := counter + 1;
if counter >= 4 then
counter := 0;
end_if;
Języki graficzne
Język schematów drabinkowych LD (Ladder Diagram), podobny do
stykowych obwodów przekaźnikowych
Umożliwia realizację zadania sterowania za pomocą standaryzowanych
symboli graficznych. Symbole te umieszcza się w obwodach w sposób
podobny do szczebli (rungs) w schematach drabinkowych dla przekaźników
układów sterowania. Wykonanie programu w języku LD polega na
"przepływie prądu", analogicznie jak w schemacie drabinkowym dla
systemu przekaźników elektromechanicznych. Przepływ prądu następuje z
lewej strony do prawej.
Język schematów blokowych FBD (Function Block Diagram), będący
odpowiednikiem schematów przepływu sygnału dla obwodów logicznych
przedstawionych w formie połączonych bramek logicznych oraz bloków
funkcyjnych takich jak w języku LD.
Grafy
graf sekwencji SFC (Sequential Function Chart), który pozwala na
opisywanie
zadań
sterowania
sekwencyjnego
za
pomocą
grafów
zawierających etapy (kroki) i warunki przejścia (tranzycji) między tymi
etapami.
Program utworzony przy pomocy sieci SFC składa się z dwóch poziomów.
Poziom pierwszy zawiera reprezentację graficzną sieci, numer
identyfikacyjny kroku i tranzycji oraz komentarz. Poziom drugi zawiera kod
akcji zapisany np. w języku ST oraz opis warunków tranzycji.
Język drabinkowy sterowników PLC.
Język schematów drabinkowych LD należy do grupy języków graficznych i
umożliwia realizację zadania sterowania za pomocą standaryzowanych symboli
graficznych. Symbole te umieszcza się w obwodach w sposób podobny do szczebli
(rungs) w schematach drabinkowych dla przekaźników układów sterowania.
Obwód jest definiowany jako zbiór wzajemnie połączonych elementów
graficznych. Obwód LD ograniczony jest z lewej i prawej strony przez szyny
prądowe. Szyny te nie są elementami obwodu. Prawa szyna może być rysowana w
sposób jawny lub pozostawać w domyśle.
Wykonanie programu w języku LD polega na "przepływie prądu", analogicznie jak
w schemacie drabinkowym dla systemu przekaźników elektromechanicznych.
Przepływ prądu następuje z lewej strony do prawej.
Styk (contact) jest elementem przekazującym do połączenia poziomego po prawej
stronie styku stan będący wynikiem mnożenia logicznego AND stanu linii łączącej
po lewej stronie styku oraz wartości przypisanej mu logicznej zmiennej
wejściowej, wyjściowej lub pamięciowej. Styk nie modyfikuje wartości
skojarzonej z nim zmiennej.
Symbole standardowych styków:
1
2
3
4
Styki statyczne
Styk zwierny (normalnie otwarty)
Stan połączenia z lewej strony styku jest przenoszony
na prawą stronę jeżeli skojarzona zmienna logiczna ma wartość 1.
Styk rozwierny (normalnie zamknięty)
Stan połączenia z lewej strony styku
na prawą stronę, jeżeli skojarzona zmienna logiczna ma wartość 0.
Styki impulsowe
Styk reagujący na zbocze narastające
Połączenie z prawej strony styku jest w stanie ON w czasie jednego
wykonania, jeśli połączenie z lewej strony jest w stanie ON a skojarzona
zmienna logiczna zmieniła wartość z 0 na 1. Poza tym stan połączenia z
prawej strony jest w stanie OFF.
Styk reagujący na zbocze opadające
Połączenie z prawej strony styku jest w stanie ON w czasie jednego
wykonania, jeśli połączenie z lewej strony jest w stanie ON a skojarzona
zmienna logiczna zmieniła wartość z 1 na 0. Poza tym stan połączenia z
prawej strony jest w stanie OFF.
Cewka (coil) przekazuje stan połączeń z lewej strony na prawą bez zmian,
powodując jednocześnie zapamiętanie stanu połączenia po swej lewej stronie przez
przypisaną jej zmienną logiczną
Symbole cewek
Cewki zwykłe
1
2
Cewka
Stan połączenia z lewej strony cewki jest przenoszony na prawą stronę i
zapamiętywany w skojarzonej zmiennej logicznej
Cewka negująca
Stan połączenia z lewej strony cewki jest przenoszony na prawą stronę a
3
4
5
6
jego odwrotność jest zapamiętywana w skojarzonej zmiennej logicznej
Cewki z zapamiętaniem stanu
Cewka ustawiająca
Skojarzona zmienna przyjmuje wartości 1 jeżeli połączenie z lewej
strony jest w stanie ON i nie zmieni się aż do chwili wyzerowania przez
cewkę kasującą
Cewka kasująca
Skojarzona zmienna przyjmuje wartości 0 jeżeli połączenie z lewej
strony jest w stanie ON i nie zmieni się aż do chwili ustawienia przez
cewkę ustawiającą
Cewki impulsowe
Cewka reagująca na zbocze narastające
Skojarzona zmienna logiczna przyjmuje wartość 1 na czas jednego
wykonania, jeśli połączenie z lewej strony zmieniło stan z ON na OFF.
Cewka reagująca na zbocze opadające
Skojarzona zmienna logiczna przyjmuje wartość 1 na czas jednego
wykonania, jeśli połączenie z lewej strony zmieniło stan z OFF na ON.
ISaGRAPH jako narzędzie programowania programowalnych
sterowników logicznych PLC.
ISaGRAPH jest programem umożliwiającym w sposób bardzo wygodny
programowanie sterowników logicznych. Program, dzięki wbudowanym
edytorom daje możliwość wpisania algorytmu działania sterownika w wielu
językach (zarówno tekstowych jak i graficznych):
- Język listy instrukcji IL (Instruction List), będący odpowiednikiem
języka typu assembler
- Język strukturalny ST (Structured Text), który jest odpowiednikiem
języka algorytmicznego wysokiego poziomu
- Język schematów drabinkowych LD (Ladder Diagram), podobny do
stykowych obwodów przekaźnikowych
- Język schematów blokowych FBD (Function Block Diagram), będący
odpowiednikiem schematów przepływu sygnału dla obwodów logicznych
przedstawionych w formie połączonych bramek logicznych oraz bloków
funkcyjnych takich jak w języku LD.
Umożliwia także tworzenie struktury wewnętrznej programu w postaci grafu
sekwencji SFC (Sequential Function Chart), który pozwala na opisywanie zadań
sterowania sekwencyjnego za pomocą grafów zawierających etapy (kroki) i
warunki przejścia (tranzycji) między tymi etapami.
Program ISaGRAPH posiada także podprogramy weryfikujące składnię i
poprawność wpisanych algorytmów. Efekt działania sterownika można
przesymulować dzięki wbudowanemu symulatorowi, który daje możliwość
wymuszania na wirtualne wejścia określonych wartości oraz obserwacji
odpowiedzi układu. Wektory testowe, możemy zapisać w postaci skryptu
(testbench), który można wielokrotnie uruchamiać. Program posiada także wiele
udogodnień graficznych. Na przykład efekty symulacji możemy oglądać w postaci
graficznej animacji.
Zweryfikowany i przesymulowany algorytm sterowania można przesłać za
pomocą odpowiedniego interfejsu (komunikacja programatora z CPU sterownika
odbywa się z użyciem łącza szeregowego).
Zastosowania programowanych układów sterowania.
- głównie w zastosowaniach przemysłowych
- automatyzacja pojedynczych maszyn (np. wtryskarek), jak i kompletnych
procesów produkcyjnych (zrobotyzowane linie montażowe, procesy ciągłe
itp. w przemyśle chemicznym, itp.).
-
automatyzacja obiektów technologicznych.
-
sterowanie oświetleniem, roletami, żaluzjami, systemami grzewczymi i
klimatyzacyjnymi oraz szeregiem innych urządzeń w gospodarstwie
domowym.
- tworzenie zdecentralizowanych struktur sterowania dla małych obiektów
typu przepompownie, oczyszczalnie ścieków
- realizacja skomplikowanych funkcji sterowania oraz do automatyzacji
dużych obiektów technologicznych.
-
wykrywanie ognia i gazu w przemyśle petrochemicznym, górnictwie, itp.),
3. Sterowniki PLC firmy GE FANUC serii 90-30
Sterowniki programowalne GE Fanuc są produktem amerykańsko-japońskiej firmy
GE Fanuc Automation. Firma ta powstała w roku 1987 jako joint-venture
amerykańskiego koncernu General Electric i japońskiej firmy Fanuc Ltd. Firma
GE Fanuc jest wiodącym producentem systemów numerycznego sterowania
obrabiarek (CNC), sterowników programowalnych (PLC) oraz robotów i laserów
przemysłowych. GE Fanuc przykłada duże znacznie do kwestii jakości
produkowanych urządzeń. Wynikiem tego, było otrzymanie certyfikatu jakości
ISO9001 oraz prestiżowej nagrody dla najlepszej elektronicznej fabryki w USA.
Firma GE Fanuc posiada duży potencjał badawczo - rozwojowy, którego owocem
jest między innymi seria sterowników programowalnych PLC 90. Sterowniki te są
zgodne pod względem konfiguracji, programowania i komunikacji, odznaczają się
wysoką jakością, elastycznością, nowoczesną i funkcjonalną konstrukcją.
Zastosowania sterowników serii 90 są bardzo szerokie, od prostych układów
sterowania do złożonych, wyrafinowanych systemów - włącznie z możliwością
pracy w warunkach niebezpiecznych. Do sterowników rodziny 90 opracowano
szereg urządzeń uzupełniających takich jak panele operatorskie czy system
rozproszonych wejść i wyjść. W Polsce produkty firmy GE Fanuc dostarczają dwie
firmy: ASTOR i ABMicro. Dzięki wymienionym zaletom sterowników serii 90, a
także konkurencyjnej ceny tych urządzeń, w naszym kraju są one sprzedawane w
dużych ilościach. Systemy automatyki zbudowane w oparciu o sterowniki serii 90
GE Fanuc znajdują zastosowanie w wielu dziedzinach gospodarki, a firmy
dostarczające sterowniki posiadają długie listy referencyjne.
Sterowniki serii 90-30
Sterowniki programowalne serii 90-30 są średniej wielkości sterownikami o
bardzo szerokim zakresie zastosowań. Sterowniki te mogą sterować pojedynczymi
urządzeniami albo kontrolować i sterować całym procesem produkcyjnym.
Sterowniki 90-30 są przedstawiane jako najszybsze urządzenia w swojej klasie.
Dodatkowym atutem serii 90-30 jest wyposażenie tej serii w dużą ilość
specjalizowanych modułów pozwalających na sterowanie nawet nietypowymi
urządzeniami.
Sterowniki serii 90-30 posiadają budowę modularną. Podstawą
sterownika jest kaseta posiadająca w zależności od typu 5 lub 10 gniazd. W
gniazdach umieszcza się moduły wejść, wyjść a także inne - specjalizowane.
System może zawierać do siedmiu dodatkowych kaset które mogą znajdować się w
oddaleniu od kasety głównej zawierającej jednostkę centralną ponad 200 metrów.
Budowa sterownika 90-30 jest jego wielką zaletą. Wykorzystanie maksymalnej
ilości ośmiu kaset z 10 gniazdami umożliwia wykorzystanie w systemie 80
modułów,
co
umożliwia
istnienie
w
systemie
ponad
1000
punktów
wejścia/wyjścia. Dodatkowo możliwość oddalenia kaset umożliwia swobodne
rozmieszczenie punktów na całym automatyzowanym obiekcie bez potrzeby
używania specjalizowanych sieci komunikacyjnych. Oczywiście systemy oparte na
sterownikach 90-30 nie muszą być tak rozbudowane. Ich wielkość zależy od
projektanta systemu. Dla kontrastu przykładem może być sterownik z 1 kasetą z 5
gniazdami. Jak zostało już wspomniane sterowniki 90-30 posiadają duży wybór
modułów typowych - takich jak moduły wejścia i wyjścia (zarówno dyskretne jak i
analogowe) - a także specjalizowanych np. moduły sterowania silnikami
krokowymi, moduły pozycjonujące stosowane w serwonapędach a także moduły
licznika impulsów wysokiej częstotliwości. Bogaty wybór modułów umożliwia
dobór koniecznych urządzeń i stworzyć jednorodny system sterowania. Sterowniki
90-30 mogą być konfigurowane i programowane za pomocą oprogramowania
LogicMaster90, Cimplicity Control, a także za pomocą pakietu VersaPro.
Programowanie sterowników 90-30 staje się wyjątkowo elastyczne dzięki
możliwości przesyłania programu sterującego i konfiguracji w trybie on-line przez
RS232, sieć Ethernet, sieć telefoniczną lub radiomodem. Seria sterowników może
współpracować z innymi urządzeniami za pomocą wbudowanych portów
RS232/RS485, specjalizowanych modułów komunikacyjnych wykorzystując wiele
powszechnie stosowanych protokółów komunikacyjnych. Sterowniki posiadają
także duże możliwości diagnostyczne. Procedury diagnostyczne umieszczają w
tablicach błędów działania informacje o błędach działania sterownika i w
oddzielnej tablicy błędy działania modułów dodatkowych. Umożliwia to szybką
lokalizację usterki czy to w module dodatkowym, czy w samym sterowniku.
Do podstawowych elementów systemu 90-30 zaliczają się:
- jednostki centralne
- kasety podstawowe
- kasety rozszerzające dla kaset podstawowych
- kasety rozszerzające do montowania w oddaleniu od kaset podstawowych
- moduły wejść / wyjść
- moduły specjalne
- zasilacze
Jednostki centralne
Jednostki centralne można podzielić na: standardowo montowane na kasecie
podstawowej i występujące jako oddzielne moduły do uzupełnienia kasety
podstawowej. Kasety, które nie posiadają zamontowanych jednostek centralnych mają specjalne gniazdo w którym można zamontować wyłącznie jednostkę
centralną. Jednostki centralne różnią się nie tylko tym, że są lub nie są
standardowo montowane na kasecie podstawowej. Inne różnice to: rodzaj
procesora, szybkość, liczba punktów wejść, rozmiar pamięci o organizacji
rejestrowej, maksymalny obszar pamięci dla programu użytkownika, ilość funkcji
wewnętrznych i inne.
Zestawienie parametrów jednostek centralnych sterowników 90-30
Jednostki
(Low End)
16-bitowe
Model 311 (jednostka procesor 80188, 8 MHz, możliwość obsługi 160 wejść/wyjść, 512
wbudowana w kasetę 5- rejestrów z danymi, program sterujący do 6 kB, szybkość
gniazdową)
wykonywania programu sterującego (tylko styki): 18 ms/kB.
Modele 313 i 323
procesor 80188, 10 MHz, możliwość obsługi 160/320 wejść/wyjść,
(jednostki wbudowane
1024 rejestrów z danymi, program sterujący do 12 kB, szybkość
w kasety odpowiednio
wykonywania programu sterującego (tylko styki): 0,6 ms/kB.
5 i 10 gniazdowe)
procesor 80188, 8 MHz, możliwość obsługi 1024 wejść/wyjść,
Model 331 (jednostka
2048 rejestrów z danymi, program sterujący do 16 kB, szybkość
centralna jako osobny
wykonywania programu sterującego (tylko styki): 0,4 ms/kB,
moduł)
możliwość rozszerzenia systemu do 5 kaset (49 gniazd).
Jednostki
(High End)
32-bitowe
procesor 80386EX, 25 MHz, możliwość obsługi 4096 wejść/wyjść,
9999 rejestrów z danymi, program sterujący do 32 kB, szybkość
Model 350 (jednostka
wykonywania programu sterującego (zawierającego tylko styki): 0,22
centralna jako osobny
ms/kB, możliwość rozszerzenia systemu do 8 kaset (79 gniazd),
moduł)
blokada dostępu do pamięci Flash, możliwość wykonywania operacji
zmiennoprzecinkowych.
konfigurowalny obszar rejestrów z danymi - max. 32640,
Model 352 (jednostki konfigurowalny obszar we/wy analogowych - max. po 32640,
centralne jako osobne pamięc 240 kB, wbudowany koprocesor arytmetyczny (sprzętowa
moduły)
realizacja operacji zmiennoprzecinkowych), 2 porty komunikacyjne
RS232 i RS485, pozostałe parametry jak w CPU350.
Model 360 (jednostka
konfigurowalny obszar rejestrów z danymi - max. 32640,
centralna jako osobny konfigurowalny obszar we/wy analogowych - max. po 32640,
moduł)
pamięć 240 kB, pozostałe parametry jak w CPU350.
Model 363 (jednostka wbudowane porty komunikacyjne RS232 i RS485 (obsługuje
centralna jako osobny protokoły SNP/SNP-X, MODBUS RTU Slave, Custom ASCII),
moduł)
pozostałe parametry jak w CPU360.
Model 364 (jednostka
wbudowany port komunikacyjny do sieci Ethernet TCP/IP (interfejsy
centralna jako osobny
AAUI lub UTP), pozostałe parametry jak w CPU360.
moduł)
Kasety
Kasety podstawowe są to płyty z przewidzianym miejscem na zamontowanie
zasilacza i z gniazdami do instalowania modułów. Kasety podstawowe różnią się
od siebie ilością gniazd a także obecnością lub nie jednostki centralnej na kasecie.
Zestawienie kaset podstawowych sterowników serii 90-30
IC693CPU311 5 gniazd, zawiera standardowo montowaną jednostkę centralną CPU311
IC693CPU313 5 gniazd, zawiera standardowo montowaną jednostkę centralną CPU313
IC693CPU323 10 gniazd, zawiera standardowo montowaną jednostkę centralną CPU313
IC693CHS397 dla CPU331, CPU341, CPU351, 5 gniazd, nie zawiera jednostki centralnej
IC693CHS391 dla CPU331, CPU341, CPU351, 10 gniazd, nie zawiera jednostki centralnej
Kasety rozszerzające dla kaset podstawowych
Kasety rozszerzające dla jednostek centralnych CPU331, CPU341 oraz CPU 351
posiadają 5 lub 10 gniazd do podłączenia modułów oraz gniazdo do podłączenia
zasilacza. Kasety te są podobne do kaset podstawowych - jedyną różnicą jest
przełącznik DIP, za pomocą którego ustawia się numer przypisany danej kasecie.
Do każdego z gniazd można podłączać moduły wejść / wyjść oraz większość
modułów dodatkowych. Maksymalna odległość od kasety podstawowej do
najbardziej odległej kasety rozszerzającej wynosi 15 metrów. Długość kabla
łączącego wszystkie kasety systemu nie może przekraczać 15 metrów, a wszystkie
kasety systemu muszą być podłączone do wspólnego przyłącza uziemienia. Po
prawej stronie każdej kasety rozszerzającej znajduje się 25 wtykowe gniazdo
złącza typu D (oznaczone EXPANSION) dla podłączenia kolejnej kasety
rozszerzającej (kaseta podstawowa również zawiera takie gniazdo).
Przykłady typów kaset rozszerzających
IC693CHS392 kaseta rozszerzająca 5 gniazd
IC693CHS393 kaseta rozszerzająca 10 gniazd
Kasety rozszerzające do montowania w oddaleniu od kaset podstawowych
Kasety rozszerzające do montowania w oddaleniu od kaset podstawowych dla
jednostek centralnych CPU331, CPU341 oraz CPU 351 posiadają 5 lub 10 gniazd
do podłączania modułów oraz gniazdo do podłączania zasilacza. Kasety te
zewnętrznie podobne są do kaset rozszerzających (posiadają przełącznik DIP) jedyną różnicą jest możliwość oddalenia ich od kasety podstawowej na odległość
213 metrów za pomocą zalecanego przez producenta kabla. W jednym systemie
mogą znajdować się zarówno kasety rozszerzające, jak i kasety montowane w
oddaleniu od kasety podstawowej.
Moduły wejść / wyjść
Moduły wejść i wyjść systemu 90-30 posiadają zwartą budowę i są instalowane
bezpośrednio w odpowiednim gnieździe kasety sterownika (może to być dowolne
gniazdo oprócz gniazda jednostki centralnej). Moduły wejścia / wyjścia systemu
90-30 można podzielić na 5 głównych grup: Moduły wejść dyskretnych przekształcają one napięcie wejściowe (stałe lub przemienne) na sygnał logiczny
wykorzystywany przez sterownik. Obwody wejściowe są odizolowane od
obwodów logicznych za pomocą optoizolatora. Moduły takie są dostępne w
wersjach 8-,16- lub 32-punktowej. Moduły wyjść dyskretnych - przekształcają one
sygnał wyjściowy otrzymany ze sterownika na napięcie o określonej wartości,
zasilające urządzenia sterowane przez system 90-30. Każdy punkt wyjściowy jest
odizolowany półprzewodnikowo. Moduły taki dostępne są w wersjach 5-, 6-, 8-,
12-, 16- lub 32- punktowej.
Moduły wejść analogowych - zapewniają one
konwersję analogowego sygnału napięciowego lub prądowego na odpowiadającą
my liczbę 12-bitową. Moduły takie dostępne są w wersjach prądowych (4- i 16kanałowych) oraz jednej napięciowej (4- kanałowej).
Moduły wyjść
analogowych - zapewniają one konwersję 12-bitowej liczby na odpowiadający jej
analogowy sygnał napięciowy lub prądowy. Moduły takie dostępne są w dwóch
wersjach napięciowej i prądowej; każda z nich jest dwukanałowa. Kombinowane
moduły wejść i wyjść - są to moduły zawierające po osiem wejść i osiem wyjść
dyskretnych.
Moduły specjalne
Moduły dyskretnych i analogowych wejść/wyjść umożliwiają wykorzystanie
sterownika do standardowych zastosowań. Jednak istnieją zagadnienia, dla których
standardowe wyposażenie sterownika nie jest wyposażeniem wystarczającym. Z
myślą o zadaniach niestandardowych powstała seria modułów specjalnych.
Przykłady modułów specjalnych:
-
Moduł licznika impulsów o wysokiej częstotliwości
- Moduł pozycjonujący dla jednej lub dwóch osi
- Moduły programowalnego koprocesora
- Moduł wejść / wyjść dla sygnałów szybkozmiennych.
Dużą częścią modułów specjalnych są moduły przeznaczone do komunikacji z
innymi urządzeniami i systemami. Moduły komunikacyjne umożliwiają włączenie
systemu automatyki z wykorzystaniem sterownika GE Fanuc do systemów
zbudowanych z innych urządzeń, a także tworzenie sieci sterowników GE Fanuc.
Przykłady specjalizowanych modułów komunikacyjnych:
Moduł komunikacyjny RTU MODBUS
Moduł komunikacyjny GENIUS PLUS
Moduł komunikacyjny GENIUS BUS CONTROLLER
Moduł komunikacyjny CMM dla złącz szeregowych RS-232/485
Moduł komunikacyjny TCP/IP ETHERNET
Karta do komputera PC - interfejs magistrali GENIUS
Program LogicMaster90
LogicMaster90 to oprogramowanie narzędziowe służące do programowania i
konfiguracji sterowników serii 90-Micro, 90-20, 90-30 (bez jednostek centralnych
CPU350 i 36x). Oprogramowanie to może być uruchomione na komputerze
kompatybilnym z IBM PC - już od IBM PC/XT począwszy. Inne wymagania
potrzebne do uruchomienia programu LogicMaster to około 2 MB wolego miejsca
na twardym dysku, 556kB standardowej pamięci RAM i system operacyjny DOS
3.1 lub późniejszy. Wymagania są więc bardzo skromne i powinien je zaspokoić
każdy współczesny komputer. Po zainstalowaniu i uruchomieniu oprogramowania
LogicMaster, komputer przyjmuje funkcję programatora. Umożliwia on
programowanie i konfigurację sterownika, ale także komunikację ze sterownikiem,
kontrolę pracy sterownika i diagnostykę systemu. Za pomocą opisywanego
oprogramowania można więc sterownik skonfigurować, napisać program sterujący
dla sterownika i przesłać program sterujący z komputera-programatora do
sterownika. Następnie korzystając z możliwości LogicMaster'a można uruchomić
wykonanie programu sterującego w sterowniku, monitorować wykonanie
programu sterującego i zachowanie sterownika a także stan zmiennych, odczytać
tablice błędów, zmodyfikować program sterujący. Oprogramowanie LogicMaster
90 umożliwia także sporządzenie pełnej dokumentacji systemu. Z tego krótkiego
opisu wynika, że LogicMaster zapewnia kompleksową obsługę sterowników GE
Fanuc.
LogicMaster umożliwia programowanie sterowników za pomocą języka
drabinowego. Dostępne są także programy nakładkowe na program LogicMaster
które umożliwiają programowanie w języku SFC tzn. w postaci grafów przepływu.
Program LogicMaster był przez długi czas jedynym sposobem na programowanie
sterowników za pomocą komputera. Przez ten okres został poprawiany i w końcu
firma GE Fanuc doprowadziła do tego, że był on programem niezawodnym i
dopracowanym do najdrobniejszego szczegółu.
Program VersaPro
VersaPro jest aplikacją przeznaczoną do pracy w środowiskach Windows
95/98/NT. Program ten posiada kilka różnic w stosunku do przeznaczonego do
pracy w tych samych systemach pakietu Cimplicity Control. VersaPro jest w
zamyśle firmy GE Fanuc następcą programu LogicMaster. Aby cel firmy GE
Fanuc został osiągnięty program VersaPro musi posiadać wszystkie cechy
użytkowe i niezawodność programu LogicMaster. Ponadto musi udostępniać nowe
rozwiązania, które ułatwią i przyspieszą obsługę sterowników.
Zupełnie nową cechą oprogramowania VersaPro jest możliwość wprowadzania
programu sterującego w postaci listy instrukcji - program zapisany jest w pliku
tekstowym zawierającym mnemoniczne kody instrukcji. Program sterujący dla
sterowników rodziny 90 może mieć charakter blokowy tzn. oprócz bloku
głównego mogą w nim występować inne bloki zwane procedurami. Każdy blok
programu może być zapisany albo w postaci drabinowej albo w postaci listy
instrukcji. Dodatkowo program VersaPro zapewnia pełną, obustronną konwersję
typów.
Konfiguracja w programie VersaPro wykonywana jest przez osobną aplikację
nazwaną HWC, która cechuje się łatwością użytkowania, oraz kontrolą
poprawności wprowadzonego zestawu. Program dba o to aby użytkownik nie
wprowadził konfiguracji, która nie może być zrealizowana np. dołączenie
koprocesora komunikacyjnego do procesora, który nie może takiego koprocesora
obsługiwać. Po wykryciu jakichkolwiek niezgodności użytkownik jest
informowany o nich i istnieje możliwość powrócenia do konfiguracji poprawnej.
Znanym udogodnieniem z programu Cimplicity Control jest możliwość tworzenia
programu przy pomocy zmiennych logicznych. Oprogramowanie VersaPro
udostępnia użytkownikowi tablicę zmiennych programu, która pozwala w łatwy i
efektywny sposób na zarządzanie zmiennymi, opisywanie ich i kontrolę
wykorzystania w programie. Obsługa tablicy zmiennych programu jest zbliżona do
pracy z arkuszem kalkulacyjnym. Istnieje także możliwość wysłania tablicy
zmiennych do arkusza kalkulacyjnego np. MS Excel. Wysoko oceniany jest
interfejs użytkownika programu VersaPro. Interfejs ten jest odbierany przez
użytkowników jako bardzo przejrzysty, dodatkowo istnieje możliwość
dostosowania go do indywidualnych upodobań. Tak jak w przypadku programu
Cimplicity Control w pakiecie VersaPro istnieje rozbudowany system pomocy,
który służy użytkownikowi radą i podpowiedzią w przypadku wątpliwości lub
niewiedzy.
VersaPro pracuje bardzo szybko, nawet na wolniejszych komputerach. Ma
stosunkowo niewielkie wymagania sprzętowe: Procesor Intel486, 66 MHz, 16 MB
RAM, Windows 95/98/NT,14 MB wolnego miejsca na dysku twardym.
Cykl pracy sterownika
Część logiczna programu sterującego dla sterowników MICRO, 90-20 i 90-30
wykonywana jest w sposób powtarzalny do momentu zatrzymania za
pośrednictwem instrukcji z komputera-programatora lub z programatora ręcznego.
Ciąg operacji koniecznych do jednorazowego wykonania programu sterującego
nazywany jest cyklem pracy sterownika. Oprócz wykonania części logicznej
programu sterującego, cykl pracy sterownika zawiera fazy gromadzenia danych z
urządzeń wejściowych, wysyłania danych do urządzeń wyjściowych,
przeprowadzania wewnętrznej inicjacji sterownika, obsługi programatora oraz
komunikacji z innymi urządzeniami.
Istnieją cztery możliwe tryby pracy sterownika: (tryb pracy ustawiany jest na
początku każdego cyklu):
-
tryb ze standardowym cyklem pracy
- tryb zatrzymania sterownika z nieaktywnymi wejściami i wyjściami
(STOP/NO IO)
tryb zatrzymania sterownika z odczytywaniem wejść i ustawianiem wyjść
(STOP/IOSCAN)
-
tryb ze stałym czasem trwania cyklu pracy sterownika..
Standardowy cykl pracy
Standardowy cykl pracy to tryb pracy sterownika we wszystkich warunkach.
Jednostka centralna pracuje, wykonując program sterujący, uaktualniając stan
wejść i wyjść, realizując komunikację itd. Czynności te powtarzają się cyklicznie.
Standardowy cykl pracy składa się z siedmiu faz. Wszystkie fazy z wyjątkiem
obsługi komputera-programatora wykonywane są podczas każdego cyklu.
Komunikacja z programatorem ma miejsce jedynie w przypadku wykrycia błędu
lub jeśli programator zgłasza żądanie komunikacji.
Opis faz standardowego cyklu pracy sterownika:
- inicjacja cyklu sterownika - polega na wykonaniu wszystkich operacji
koniecznych do rozpoczęcia cyklu (uaktualnianie wartości zmiennych
systemowych np. zmiennych przypisanych generatorom sygnału
prostokątnego itd.)
- obsługa wejść - odczytywanie stanu wejść sterownika bezpośrednio przed
wykonaniem części logicznej programu sterującego (odczytywanie wejść
wszystkich modułów i zapisanie ich wartości w pamięci adresowanej przez
zmienne %I -wejścia dyskretne, oraz %AI -wejścia analogowe)
- wykonanie części logicznej programu sterującego - rozpoczyna się
natychmiast po zakończeniu odczytywania wejść, program sterujący
wykonywany jest zawsze w kolejności instrukcji, począwszy od pierwszej
instrukcji pierwszego szczebla programu, aż do instrukcji END kończącej
program
- obsługa wyjść - przypisanie stanu zmiennych wyjściowych fizycznym
wyjściom sterownika, ma to miejsce bezpośrednio po wykonaniu części
logicznej programu sterującego (stan wyjść zostaje uaktualniony na
podstawie wartości zmiennych %Q - wyjścia dyskretne oraz %AQ - wyjścia
analogowe)
- komunikacja z programatorem - wykonywana, gdy do sterownika
podłączony jest programator lub w układzie jest moduł wymagający
konfiguracji; sterownik umożliwia podłączenie za pomocą łącza
szeregowego programatora ręcznego lub komputera -programatora
wyposażonego w oprogramowanie LogicMaster 90 i komunikację przy
pomocy protokołu SNP
- komunikacja systemowa - realizowane są żądania komunikacji z modułami
urządzeń dodatkowych, np. z modułem programowalnego koprocesora;
żądania komunikacji są obsługiwane w kolejności napływania.
-
obliczanie sumy kontrolnej programu sterującego (faza diagnostyczna) wykonywana przy końcu każdego cyklu pracy sterownika; obliczenie tej
sumy dla całego programu może trwać zbyt długo, użytkownik może wiec
wyszczególnić liczbę słów (od 0 do 32) na podstawie której ma zostać
obliczona suma kontrolna.
Tryb pracy sterownika przy zatrzymanym sterowniku.
Gdy sterownik znajduje się w trybie STOP, program sterujący nie jest
wykonywany. Użytkownik może dokonać wyboru, czy wejścia i wyjścia
sterownika mają być odpowiednio odczytywane i ustawiane, czy nie. W przypadku
wybrania trybu z odczytywaniem wejść i ustawianiem wyjść mówimy o trybie
(STOP/IOSCAN) w przypadku wyboru nie odczytywania stanu wejść i nie
ustawiania stanu wyjść sterownik pracuje w trybie (STOP/NO IO). W obydwu
przypadkach ma miejsce komunikacja sterownika z programatorem i
specjalizowanymi modułami urządzeń dodatkowych. Dodatkowo w trybie STOP
kontynuowana jest rekonfiguracja modułów oraz ich kontrola w celu wykrycia
ewentualnych błędów w działaniu. W celu zwiększenia skuteczności system
operacyjny w trybie STOP przeznacza większą ilość czasu na komunikację. Jeśli
sterownik znajduje się w trybie zatrzymania i jest skonfigurowany tak, aby nie
przeprowadzać odczytywania wejść i wyjść w tym trybie (STOP/NO IO) to faza
obsługi wejść oraz faza obsługi wyjść zostaje pominięta.
Tryb ze stałym czasem trwania cyklu pracy sterownika. W standardowym trybie
pracy każdy cykl jest wykonywany tak szybko, jak to możliwe, co powoduje, że
czasy trwania poszczególnych cykli mogą się różnić. Trybem alternatywnym jest
tryb ze stałym czasem trwania cyklu pracy sterownika, który może być ustalony w
przedziale od 5 do 200 ms. Jednym z powodów dla zastosowania omawianego
trybu pracy może być zapewnienie uaktualniania stanu wyjść sterownika w stałych
odstępach czasu. Innym może być wprowadzenie pewnego odstępu czasowego
pomiędzy fazą obsługi wyjść sterownika a fazą obsługi wejść w następnym cyklu,
co umożliwia ustalenie się stanu wejść po otrzymaniu danych wyjściowych z
programu. Jeśli czas przeznaczony na jeden cykl upłynie przed zakończeniem
wykonywania cyklu, cały cykl, włącznie z fazami komunikacji z programatorem i
innymi urządzeniami, zostaje dokończony. Jednakże na początku następnego cyklu
zostanie zarejestrowany błąd przekroczenia czasu trwania cyklu.
Określanie czasu trwania pełnego czasu trwania cyklu pracy
sterownika.
W trybie pracy sterownika ze stałym czasem trwania cyklu czas trwania cyklu jest
z góry określony. W pozostałych trybach czas ten nie jest znany - cykl jest
wykonywany tak szybko jak to możliwe. Jednak w razie potrzeby określenia czasu
trwania cyklu można tego dokonać sumując czasy wykonywania poszczególnych
faz cyklu. Czas trwania faz inicjacji i diagnostyki jest stały. Czas trwania fazy
wprowadzenia danych wejściowych i fazy wyprowadzenia danych wyjściowych
zależy od ilości od modułów wejść oraz modułów wyjść, a także od rodzajów tych
modułów (ilości punktów). Czas trwania fazy wykonania programu sterującego
zależy od długości programu i typów instrukcji stosowanych w programie.
Długość trwania fazy obsługi programatora zależy czy jest to komputerprogramator czy programator ręczny. Czasy trwania poszczególnych faz cyklu
oraz czasy odczytywania wejść i ustawiania wyjść a także czasy wykonywania
szczebli programu sterującego można znaleźć w dokumentacji sterowników GE
Fanuc.
4. Sterowniki PLC firmy SIEMENS serii SIMATIC S7
Sterowniki programowalne serii S7-200 są najmniejszymi z całej rodziny
sterowników programowalnych SIMATIC S7. Jednostka centralna CPU oraz
wejścia i wyjścia są zintegrowanymi częściami PLC. Wejścia monitorują
dwustanowe urządzenia obiektowe takie jak przełączniki i czujniki. Wyjścia
natomiast sterują urządzeniami takimi jak silniki i pompy. Złącze 9-cio pinowe
przeznaczone jest do podłączenia programatora. Sterowniki te stanowią optymalne
urządzenia do kontroli zadań indywidualnych i sieciowych w konfiguracjach
zdecentralizowanych. Popularność jednostek centralnych tej serii związane jest ze
znaczną uniwersalnością rozwiązań, zaś istota ich atrakcyjności polega na
bezpośrednim dostępie do wszystkich funkcji bez dodatkowych nakładów.
Łatwość posługiwania się oprogramowaniem narzędziowym STEP 7/Micro-Win
sprawia, że masowość aplikacji sterowników tej serii stawia je w gronie
najbardziej popularnych sterowników dostępnych na rynku.
Większość typów sterowników serii S7-200 wyposażonych jest w zegar czasu
rzeczywistego umożliwiający synchronizację działania sterownika z kalendarzem.
Wszystkie dostępne na rynku jednostki centralne mogą nadzorować procesy
zarówno dyskretne, jak i ciągłe, przy czym posiadają możliwość dostrojenia
nastaw przy pomocy potencjometrów analogowych.. Są to jednoobrotowe
potencjometry, których nastawę realizuje się przy pomocy wkrętaka. Kąt położenia
elementu obrotowego potencjometru odzwierciedlany jest w sterowniku w postaci
ośmiobitowego parametru. Może on być wykorzystywany w procesie sterowania.
Większość sygnałów kierowanych z obiektu do sterownika to przebiegi
wolnozmienne. Istnieją jednak procesy wymagające zliczania sygnałów o dużej
częstotliwości, np. podczas odczytu impulsów z przetwornika położenia czy
podczas zliczania szybko poruszających się detali. Sterowniki serii S7-200
wyposażone są w szybkie liczniki[4] zdarzeń umożliwiające współpracę z
enkoderami inkrementalnymi lub z szybkimi czujnikami obiektowymi. Posiadają
także zabezpieczenie hasłem przed dostępem do programu sterownika osób
nieupoważnionych. Nie wymagają stosowania baterii do podtrzymywania
parametrów wewnętrznych. W tym celu zastosowano kondensatory zapewniające
przechowywanie danych nawet przez 50 – 190 godzin po zaniku napięcia.
Oczywiście program sterujący jest przechowywany w pamięci EEPROM. Do
archiwizowania programu bądź jego powielania opracowano dodatkową pamięć
zewnętrzną o niewielkich wymiarach. Kopiowanie programu realizowane jest
przez sterownik samoczynnie. Wystarczy włożyć do gniazda moduł pamięci
EEPROM i włączyć zasilanie sterownika. Po krótkiej chwili moduł ten można
wyjąć, gdyż program został trwale zapamiętany w wewnętrznej pamięci
sterownika.
Programy dla sterowników SIMATIC S7-200 mogą być przygotowywane w
formie drabinkowej lub jako lista instrukcji. Do napisania programu działania
urządzenia można użyć programatora typu Laptop ( PG 720, PG 740 ) lub
dowolnego komputera klasy PC, używając do tego programu STEP 7/Micro-Win.
Program ten pozwala także na pełną diagnostykę stanu sterownika i urządzenia
sterowanego, tworzenie dokumentacji, modyfikację oprogramowania i
wymuszanie stanów wyjściowych zarówno w trybie pracy RUN jak i STOP. Port
komunikacyjny sterownika zbudowany jest w oparciu o standard RS 485. Standard
RS 485 jest powszechnie używany w systemach przemysłowych narażonych na
zakłócenia. Do podłączenia z komputerem wymagany jest przetwornik RS 232 /
RS 485. Do organizacji transmisji i nadzoru nad jej poprawnością używany jest
protokół PPI. Protokół ten umożliwia parametryzowanie programów
sterowniczych oraz ich wizualizację za pomocą standardowych pulpitów, paneli
operatorskich bądź komputerów sterowania nadrzędnego. Dla indywidualnych
potrzeb użytkowników możliwa jest realizacja transmisji bez wykorzystania
protokołu standardowego. Port komunikacyjny sterownika może pracować także w
swobodnym trybie transmisji znaków ASCII.
Komunikacja przez złącze transmisyjne jest jednym z podstawowych
sposobów dostarczania informacji do i ze sterownika. Tym sposobem jednostkę
centralną można połączyć z innymi sterownikami wspólnego systemu kontroli ( w
trybie Master – Slave ), czytnikami informacji kodowych ( kody kreskowe,
pastylkowe nośniki informacji ), układami napędowymi silników a także
modemowymi łączami dla odległych transmisji danych i zdalnej diagnostyki.
Sterowniki S7-200 z uwagi na rozbudowane możliwości komunikacyjne często
znajdują zastosowanie w rozproszonych systemach sterowania, gdzie stanowią
samodzielne układy kontroli niewielkich segmentów w ramach rozbudowanego
systemu. Jest to zgodne z tendencją rozpraszania mocy obliczeniowych i
możliwością decyzyjnych na coraz niższe poziomy przy jednoczesnej koordynacji
współdziałania sterowników przez jednostki nadrzędne. Związane jest to także ze
zwiększającymi się potrzebami przemysłu na szersze powiązania układów
sterowania maszyn z zakładowymi systemami planowania i zarządzania.
Rys. 1 Ogólny widok sterownika serii S7-200
Tabela 2
Opis Modelu
CPU 212 DC/DC/DC
Zasilanie
24 V DC
Typ Wejść
8 wejść DC
Typ Wyjść
8 wyjść DC
CPU 212 AC/DC/STYK
120/230 V AC
8 wejść DC
8 wyjść STYK
CPU 212 AC/AC/AC
120/230 V AC
8 wejść AC
8 wyjść AC
CPU 214 DC/DC/DC
24 V DC
14 wejść DC
10 wyjść DC
CPU 214 AC/DC/STYK
120/230 V AC
14 wejść DC
10 wyjść STYK
CPU 214 AC/AC/AC
120/230 V AC
14 wejść AC
10 wyjść AC
Podstawowe parametry jednostek centralnych
Tabela 3
SIMATIC S7-200 (Dane techniczne )
1
Typ procesora
2
CPU 212
Rozmiary: (WxHxD) w mm
3
CPU 214
160x80x62
197x80x62
Pamięć programu:
1Kbajt/ typ 521 instrukcji
4Kbajty/ 2 K instrukcji
Pamięć danych:
512 słów
2048 słów
Moduł pamięci zewnętrznej
-
Moduł EEPROM
Sposób podtrzymania danych
Wolno rozładowujący się
wolno rozładowujący się
kondensator
kondensator, moduł baterii
typ 190 godz. Dla kondensatora,
Czas podtrzymania danych
Typ. 50 godzin
Czas przetwarzania programu
1.2 s dla operacji bitowych
0.8 s dla operacji bitowych
8 wejść/ 6 wyjść
14 wejść/10 wyjść
64 wejść/ 64 wyjść
64 wejść/ 64 wyjść
16 wejść/ 16 wyjść
16 wejść/ 16 wyjść
Maksymalna konfiguracja
2 moduły rozszerzające
7 modułów rozszerzających
Liczba znaczników:
128
256
Liczba liczników:
64
128
Liczba tajmerów:
64
128
Wejścia i wyjścia binarne
wbudowane:
Maksymalna ilość wejść i
wyjść binarnych
Maks. ilość wejść i wyjść
analogowych
10 lat dla modułu baterii
Logika bitowa i słowna, zliczanie, opóźnienia czasowe, skoki do
Lista instrukcji
podprogramów, funkcje konwersji kodów, funkcje
diagnostyczne, komunikacyjne, przesyłanie danych, przesuw
informacji, wykrywanie zboczy, pętla FOR/NEXT, bezpośredni
dostęp do we/wy, funkcje zliczania szybkiego.
Przerwania czasowe:
Tak (2-255 ms)
Tak (2-255 ms)
Przerwania sprzętowe:
1
4
Przerwania komunikacyjne:
Tak
Tak
Dodawanie, odejmowanie,
Dodawanie, odejmowanie,
mnożenie
mnożenie
Arytmetyka stałoprzecinkowa
RS 485 do komunikacji PPI
Interfejs komunikacyjny
lub swobodnie
programowalnej
RS 485 do komunikacji PPI lub
swobodnie programowalnej
Szybkie liczniki:
1 programowalny
1 programowalny, 2 sprzętowe
Wyjścia impulsowe
Nie
2 wyjścia F max do 4KHz
Praca w sieci
AS-I
AS-I
Zabezpieczenie hasłem
Tak, 3-poziomowe
Tak,3-poziomowe
1 o rozdzielczości 1/200
2 o rozdzielczości 1/200
24VDC/180 mA
24 VDC/280 mA
Nie
Tak
Analogowe potencjometry do
ustawiania parametrów
Wbudowany zasilacz do
czujników
Zegar czasu rzeczywistego
STEP 7 Micro/DOS lub STEP 7 Micro/WIN przy użyciu
Oprogramowanie narzędziowe
programatorów PG720, PG740, PG760 lub komputerów PC
(AT)
Tabela 4
SIMATIC S7-200 (Dane techniczne )
1
2
3
Typ procesora
CPU 215
CPU 216
Rozmiary: (WxHxD) w mm
218x80x62
218x80x62
Pamięć programu:
8Kbajt/ 4 K instrukcji
8Kbajt/ 4 K instrukcji
Pamięć danych:
2.5 K słów
2.5 K słów
Moduł pamięci zewnętrznej
Moduł EEPROM
Moduł EEPROM
Wolno rozładowujący się
wolno rozładowujący się
kondensator, moduł baterii
kondensator, moduł baterii
Typ 190 godz. dla
typ 190 godz. Dla
kondensatora, 10 lat dla
kondensatora, 10 lat dla
modułu baterii
modułu baterii
0.8 s dla operacji bitowych
0.8 s dla operacji bitowych
14 wejść/10 wyjść
24 wejść/16 wyjść
64 wejść/ 64 wyjść
64 wejść/ 64 wyjść
16 wejść/ 16 wyjść
16 wejść/ 16 wyjść
Maksymalna konfiguracja
7 modułów rozszerzających
7 modułów rozszerzających
Liczba znaczników:
256
256
Liczba liczników:
128
128
Liczba tajmerów:
128
128
Sposób podtrzymania danych
Czas podtrzymania danych
Czas przetwarzania programu
Wejścia i wyjścia binarne
wbudowane:
Maksymalna ilość wejść i
wyjść binarnych
Maks. ilość wejść i wyjść
analogowych
Logika bitowa i słowna, zliczanie, opóźnienia czasowe, skoki
do podprogramów, funkcje konwersji kodów, funkcje
Lista instrukcji
diagnostyczne, komunikacyjne, przesyłanie danych, przesuw
informacji, wykrywanie zboczy, pętla FOR/NEXT, bezpośredni
dostęp do we/wy, funkcje zliczania szybkiego.
Przerwania czasowe:
Tak (2-255 ms)
Tak (2-255 ms)
Przerwania sprzętowe:
4
4
Przerwania komunikacyjne:
Tak
Tak
Dodawanie, odejmowanie,
Dodawanie, odejmowanie,
mnożenie
mnożenie
Arytmetyka stałoprzecinkowa
Interfejs komunikacyjny
RS 485 do komunikacji PPI lub RS 485 do komunikacji PPI lub
swobodnie programowalnej
swobodnie programowalnej
1 programowalny, 2 sprzętowe 1 programowalny, 2 sprzętowe
Szybkie liczniki:
Wyjścia impulsowe
2 wyjścia F max do 4KHz
2 wyjścia F max do 4KHz
Praca w sieci
AS-I, PROFIBUS-DP
AS-I
Zabezpieczenie hasłem
Tak, 3-poziomowe
Tak, 3-poziomowe
2 o rozdzielczości 1/200
2 o rozdzielczości 1/200
24 VDC/400 mA
24 VDC/400 mA
Tak
Tak
Analogowe potencjometry do
ustawiania parametrów
Wbudowany zasilacz do
czujników
Zegar czasu rzeczywistego
STEP 7 Micro/DOS lub STEP 7 Micro/WIN przy użyciu
Oprogramowanie narzędziowe
programatorów PG720, PG740, PG760 lub komputerów PC
(AT)
Tabela 5
SIMATIC S7-200 (Dane techniczne )
1
2
3
Typ procesora
CPU 221
CPU 224
Rozmiary: (WxHxD) w mm
90x80x62
120,6x80x62
Pamięć programu:
2048 instrukcji
4096 instrukcji
Pamięć danych:
1024 słów
2560 słów
Moduł pamięci zewnętrznej
Moduł EEPROM
Moduł EEPROM
Sposób podtrzymania danych
Kondensator
kondensator,
Czas podtrzymania danych
Typ. 50 godzin
typ 190 godz.
Czas przetwarzania programu
0.37 s dla operacji bitowych
0.37 s dla operacji bitowych
6 wejść/ 4 wyjść
14 wejść/10 wyjść
10
128
Brak
16 wejść/ 16 wyjść
Wejścia i wyjścia binarne
wbudowane:
Maksymalna ilość wejść i
wyjść binarnych
Maks. ilość wejść i wyjść
analogowych
Maksymalna konfiguracja
Brak modułów rozszerzających
7 modułów rozszerzających
Liczba znaczników:
256
256
Liczba liczników:
256
256
Liczba tajmerów:
256
256
Logika bitowa i słownaa, zliczanie, opóźnienia czasowe, skoki
do podprogramów, funkcje konwersji kodów, funkcje
Lista instrukcji
diagnostyczne, komunikacyjne, przesyłanie danych, przesuw
informacji, wykrywanie zboczy, pętla FOR/NEXT, bezpośredni
dostęp do we/wy, funkcje zliczania szybkiego.
Przerwania czasowe:
Tak (1-255 ms)
Tak (1-255 ms)
Przerwania sprzętowe:
4
4
Przerwania komunikacyjne:
Tak
Tak
Dodawanie, odejmowanie,
Dodawanie, odejmowanie,
mnożenie
mnożenie
Arytmetyka stałoprzecinkowa
Interfejs komunikacyjny
RS 485 do komunikacji PPI lub RS 485 do komunikacji PPI lub
swobodnie programowalnej
swobodnie programowalnej
Szybkie liczniki:
4
6
Wyjścia impulsowe
2
2
Praca w sieci
AS-I
AS-I
Zabezpieczenie hasłem
Tak, 3-poziomowe
Tak,3-poziomowe
1
2
24VDC
24 VDC
Tak
Tak
Analogowe potencjometry do
ustawiania parametrów
Wbudowany zasilacz do
czujników
Zegar czasu rzeczywistego
STEP 7 Micro/DOS lub STEP 7 Micro/WIN przy użyciu
Oprogramowanie narzędziowe
programatorów PG720, PG740, PG760 lub komputerów PC
(AT)
Stopień ochrony
IP 20
IP 20
Sterowniki S7–200 są rozbudowywalne. Moduły rozszerzające zawierają
dodatkowe wejścia i wyjścia. Są one podłączone do jednostki bazowej poprzez
złącza magistrali. S7-212 może być rozbudowany do 78 wejść / wyjść
dwustanowych ( 14 we / wy jest zintegrowanych z CPU ). Maksymalnie można
podłączyć 2 moduły rozszerzające. S7-214 może być rozszerzony do 120 wejść /
wyjść dwustanowych ( 16 we / wy jest zintegrowanych z CPU ). Maksymalnie
można podłączyć 7 modułów rozszerzających.. S7-216 może być rozszerzony do
128 wejść / wyjść dwustanowych ( 16 we / wy jest zintegrowanych z CPU ).
Maksymalnie można podłączyć 7 modułów rozszerzających. Na Rys.3.19
pokazano sposób przyłączenia modułów rozszerzających
Wykaz dostępnych modułów rozszerzających
Tabela 6
Dane katalogowe
Nr katalogowy
1
2
Moduł wejść cyfrowych EM 221
-8 wejść, 24 VDC
6ES7221-1BF00-0XA0
-8 wejść 24 VDC typu NPN
6ES7221-1BF10-0XA0
-8 wejść 24 V AC
6ES7221-1JF00-0XA0
-8 wejść 120 V DC
6ES7221-1EF00-0XA0
Moduł wyjść cyfrowych EM222
-8 wyjść 24 V DC
6ES7222-1BF00-0XA0
-8 wyjść przekaźnikowych
6ES7222-1HF00-0XA0
-8 wyjść 24 -230 V DC
6ES7222-1EF00-0XA0
Moduł wejść/ wyjść cyfrowych EM223
-4 wejścia / wyjścia 24 V DC
6ES7223-1BF00-0XA0
-4 wejścia 24V DC, 4 wyjścia przekaźnikowe
6ES7223-1HF00-0XA0
-8 wejść/ wyjść 24 V DC
6ES7223-1BH00-0XA0
-8 wejść 24 V DC, 8 wyjść przekaźnikowych
6ES7223-1PH00-0XA0
-16 wejść/16 wyjść 24 V DC
6ES7223-1BL00-0XA0
-16 wejść 24 V DC 16 wyjść przekaźnikowych
6ES7223-1PL00-0XA0
-4 wejścia / 4 wyjścia 120 V AC
6ES7223-1EF00-0XA0
Moduły wejść analogowych EM231
3 wejścia
6ES7231-0HC00-0XA0
Moduły wyjść analogowych EM232
2 wyjścia
6ES7232-0HB00-0XA0
Moduł wejść / wyjść analogowych EM235
3 wejścia 1 wyjście
6ES7235-OKD00-0XA0
4. Sterowniki PLC firmy ALLEN-BRADLEY serii Micrologix 1200
Sterowniki programowalne MicroLogix 1200 zawierają w jednej obudowie:
procesor, zasilacz i wbudowane we/wy. Wersje sterowników z 24 lub 40 punktami,
bazując na sprawdzonej architekturze systemów MicroLogix i SLC, umożliwiają
realizacje różnorodnych aplikacji.
Modułowa, bezkasetowa konstrukcja sterowników MicroLogix 1200, zapewnia
niską cenę systemu i zmniejszone zapasy części zamiennych. Moduły rozszerzeń
we/wy zwiększają elastyczność systemu.
Moduły pamięci sprawiają, że programy mogą być w łatwy sposób ściągane,
ładowane i przenoszone pomiędzy sterownikami. Zegar czasu rzeczywistego
(RTC) umożliwia realizację aplikacji zależnych od czasu rzeczywistego.
System operacyjny może być uaktualniany bez konieczności wymiany sprzętu.
Oprogramowanie sterownika może być uaktualnione za pomocą umieszczonego na
stronach internetowych oprogramowania typu ControlFlash.
Sterowniki MicroLogix 1200 wykorzystują oprogramowanie RSLogix 500 TM i
charakteryzują się wspólnym dla sterowników MicroLogix 1500 i SLC 500
zestawem instrukcji
Własności:
Wysokiej klasy rozszerzenia we/wy poprzez moduły rozszerzeń MicroLogix
1200. Do jednego sterownika można dołączyć do sześciu modułów
rozszerzających (należy uwzględnić bilans mocy).
Zaawansowane możliwości komunikacyjne, od komunikacji typu
partnerskiego (peer to peer), do sieci SCADA/RTU.
Pamięć użytkownika o pojemności 6K (4K program, 2K dane).
Ochrona ładowania plików z danymi zapobiega nadpisaniu danych
krytycznych podczas transmisji.
Zegar czasu rzeczywistego i moduły pamięci.
Arytmetyka 32 bitowa dla liczb całkowitych ze znakiem.
Wbudowany algorytm PID.
Szybki licznik (20 kHz) posiadający osiem trybów działania. Wyjście
licznika jest ustawiane wtedy, gdy osiągnie ono zaprogramowaną, dolną lub
górną, wartość zadaną.
Cztery wejścia przerwań dla szybkiego przetwarzania.
Cztery wejścia zatrzaskowe, wychwytujące mikrosekundowe impulsy, w
celu ich przetworzenia podczas normalnego cyklu programu.
Dwa potencjometry analogowe wbudowane w sterownik. 3/4 obrotu ustawia
sygnał wyjściowy potencjometru, w zakresie od zera do 250.
Odłączalne bloki końcówek, dla sterowników 40-punktowych, umożliwiają
łatwe dołączenie kabli i zmniejszenie czasu instalacji.
Wymienne etykiety z polami na napisy, pozwalają na szybką identyfikację
urządzeń obiektowych, połączonych ze sterownikiem, zmniejszając w ten
sposób czas obsługi systemu.
Ergonomiczne bloki końcówek spełniają wszystkie wymogi bezpieczeństwa.
Przyznawanie certyfikatów, przez odpowiednie agencje, jest w toku.
Charakterystyka wejść
Napięcie stanu załączonego (ON)
79 do 132V ac
Napięcie stanu wyłączonego (OFF)
0 do 20V ac
47 Hz do 63 Hz
Częstotliwość pracy
Prąd w stanie załączonym (ON)
Prąd upływowy w stanie
wyłączonym (OFF)
Impedancja nominalna
Prąd rozruchowy (max) przy 120V
ac
1762-L24BWA i 1762-L40BWA
1762-L24AWA
1762-L40AWA
Opis parametru
Wejścia 0 do 3
Wejście 4 i wyższe
14 do 26.4V dc przy 55°C
(131°F)
14 do 30.0V dc przy 30°C (86°F)
0 do 5V dc
0 Hz do 20 kHz
10 do 26.4V dc przy 55°C
(131°F)
10 do 30.0V dc przy 30°C (86°F)
5.0 mA przy 79V dc (min.)
12 mA przy 120V dc
(nom.)
6.0 mA przy 132V dc
(max.)
2.5 mA max.
2.5 mA przy 14V dc (min.)
8.8 mA przy 24V dc (nom.)
12.0 mA przy 30V dc (max.)
12K przy 50 Hz
10K przy 60 Hz
250 mA
2.5K
0 Hz do 1 kHz
(zależnie od czasu skanowania)
2.0 mA przy 10V dc (min.)
8.5 mA przy 24V dc (nom.)
12.0 mA przy 30V dc (max.)
1.5 mA min.
2.6K
Nie dotyczy
Moduły rozszerzeń we/wy
Moduły rozszerzeń we/wy systemu MicroLogix 1200 zapewniają wyższą
funkcjonalność przy niskich kosztach. Różnorodność modułów sprawia, że
możliwości sterowników MicroLogix 1200 zostają uzupełnione i zwiększone
poprzez dostęp do nowych typów we/wy i zwiększenie ich liczby.
Sterownik MicroLogix 1200 posiada
bezkasetową konstrukcję modułową.
Eliminacja kasety pozwoliła na zmniejszenie
kosztów i zapasów części zamiennych.
Obudowy sterowników MicroLogix 1200
pozwalają na montaż na szynie DIN lub w
panelu. Zatrzaski dla szyn DIN i otwory na
śruby montażowe stanowią integralną część
obudowy
Własności:
Konstrukcja bezkasetowa eliminuje dodatkowe koszty i zapasy części.
Małe wymiary zmniejszają zapotrzebowanie na przestrzeń w panelu.
Zintegrowana magistrala we/wy o wysokiej efektywności.
Programowe kluczowanie zapobiega niewłaściwemu umieszczeniu modułu
w systemie.
Duża funkcjonalność we/wy umożliwia różnorodne zastosowania.
Przekaźniki typu AC/DC, napięcia 24V dc i 120V ac.
Moduł we/wy analogowych
Moduł we/wy analogowych, 1762-IF2OF2, przetwarza sygnał analogowy na
cyfrowy i przechowuje go w postaci cyfrowej do wykorzystania przez sterownik
MicroLogix 1200. Moduł może być połączony z dowolną kombinacją dwóch
czujników o wyjściu napięciowym lub prądowym. Dwa kanały wyjściowe
obsługują niesymetryczne wyjścia analogowe, indywidualnie konfigurowalne jako
prądowe lub napięciowe. Taka struktura zapewnia elastyczność, ogranicza zapasy
urządzeń i zmniejsza nakłady na
szkolenie personelu.
Moduł we/wy analogowych sterownika
MicroLogix 1200 posiada
rozdzielczość 12 bitową, co sprawia, że
jest on doskonałym rozwiązaniem dla
zastosowań, w których należy mierzyć i
sterować niewielkimi zmianami
wielkości analogowych.
Możliwości komunikacyjne
Wszystkie sterowniki MicroLogix 1200 posiadają kilka opcji komunikacyjnych
ułatwiających dopasowanie do różnorodnych aplikacji.
Protokół DF1 Full Duplex umożliwia bezpośrednią komunikację sterowników
MicroLogix 1200 z innymi urządzeniami, takimi jak komputery osobiste lub
interfejsy operatorskie. Protokół DF1 Full-Duplex (określany również jako
protokół DF1 punkt-punkt), stosowany jest wtedy, gdy wykorzystywana jest
komunikacja RS-232.
Komunikacja DH485 umożliwia zbudowanie sieci do 32 urządzeń, takich jak
sterowniki MicroLogix lub SLC 500, interfejsy HMI i/lub komputery PC
wykorzystujące komunikację partnerską.
Sterowniki MicroLogix 1200 mogą współpracować z siecią DeviceNet. DeviceNet
łączy cyfrowo przyciski sterujące, czujniki, siłowniki, sterowniki i inne urządzenia
w otwartej sieci przemysłowej.
Sterowniki MicroLogix 1200 mogą wykorzystywać również protokół DF1 HalfDuplex do komunikacji w systemach SCADA, w charakterze zdalnych stacji
nadawczych (RTU). Ta otwarta sieć umożliwia pracę sterownika MicroLogix
1200, w charakterze układu podporządkowanego (slave), jako węzła sieci DF1
master/slave. Protokół umożliwia podłączenie do 254 urządzeń podrzędnych
(slave) do jednego urządzenia nadrzędnego (master).
Dodatkowo sterowniki MicroLogix 1200 dopuszczają również protokoły Modbus
Slave i SCADA/RTU.
Narzędzia programistyczne
Pakiet RSLogix 500 do programowania w języku drabinkowym, zapewnia
maksymalizację wydajności projektowania, oszczędność czasu i poprawę
efektywności pracy. Pakiet może pracować pod kontrolą 32-bitowych systemów
operacyjnych firmy Microsoft: Windows® 95, Windows® 98, and Windows NTTM.
Przeznaczony dla sterowników SLC 500 i MicroLogix pakiet RSLogix 500, jest
pierwszym narzędziem programistycznym oferującym bezkonkurencyjną
wydajność i przemysłowy interfejs użytkownika.
3. Pomiar prędkości obrotowej
Pomiary prędkości obrotowej mają istotne znaczenie w miernictwie
przemysłowym. Mogą one być dokonywane metodami analogowymi lub
cyfrowymi . Metody analogowe polegają na wykorzystaniu do pomiaru prędkości
obrotowej przetworników ruchu obrotowego, których sygnał wyjściowy jest ciągłą
funkcją mierzonej prędkości (np. napięcie stałe lub zmienne).
W metodach cyfrowych przetwarza się ruch obrotowy na ciąg impulsów , których
liczba jest zależna od mierzonej prędkości. Układy pomiarowe z przetwornikami
prędkości obrotowej mogą być prostymi układami tachometrycznymi lub
złożonymi , w których oprócz prędkości mierzy się inne parametry ruchu
obrotowego ( fluktuacje prędkości , mimośrodowość itp.). W analogowych
układach pomiaru prędkości obrotowej mogą być wykorzystywane oprócz prądnic
tachometrycznych napięcia stałego i zmiennego także przetworniki działające
impulsowo, których sygnał wyjściowy (o charakterze napięciowym) jest
przetwarzany w układach analogowych na napięcie o ciągłym przebiegu
czasowym (np. pojemnościowe przetworniki integracyjne).
Pomiar prędkości obrotowej za pomocą tachometru
Tachometr mechaniczny, działający na zasadzie odchylania się obracających się
ciężarków pod wpływem siły odśrodkowej, wyskalowany najczęściej w obrotach
na minutę, pozwala na pomiar prędkości obrotowej z dokładnością do 0,5%.
Obracanie tachometru, dociśniętego do wału badanej maszyny, oznacza powstanie
dodatkowego momentu hamującego. Dlatego taki tachometr może być stosowany
tylko przy badaniach maszyn odpowiednio dużych, kiedy moment hamujący
tachometru jest pomijalnie mały w stosunku do momentu obrotowego badanej
maszyny.
Mechaniczny licznik obrotów, tj. zespół kół zębatych powodujących przy
obracaniu się odchylenie wskazówki, zlicza obroty przez określony czas (np. 3 s).
Uruchamia się go po przyciśnięciu do walka badanej maszyny. Licznik obrotów
zużywa znacznie mniejszą moc niż tachometr, dokładność jego dochodzi do 0,1%,
zakres prędkości może wynosić od 0 do 10 000 obr/min, nadaje się do pomiarów
tylko w stanach ustalonych
Pomiar prędkości obrotowej za pomocą tachometru
elektromagnetycznego
Na wirującym wale badanej maszyny umocowuje się tarczę metalową, naprzeciw
której umieszczone są trwałe magnesy mogące się odchylać. Na magnesy działa
moment zwracający od spiralnej sprężyny. Odchylenie wskazówki złączonej z
magnesami jest miarą prędkości obrotowej. Moment tarcia tarczy o powietrze i
moment pomiędzy tarczą i magnesami jest niewielki. Dlatego tachometr
elektromagnetyczny nadaje się także do badania maszyn niewielkiej mocy, z
wyjątkiem maszyn o mocy bardzo małej (kilka watów), czyli tzw. mikromaszyn.
Rezystancja obwodów zwartych w tarczy należy od temperatury, więc wskazania
tachometru elektromagnetycznego również zależą od temperatury
Pomiar prędkości obrotowej za pomocą impulsów
wymuszanych przez badaną maszynę
Na wał badanej maszyny nakłada się komutator składający się na przemian z wycinków przewodzących i izolujących. Po komutatorze ślizgają się dwie szczotki
(równocześnie wchodzące na ten sam wycinek komutatora), pomiędzy które
włącza się obwód, składający się ze źródła napięcia stałego, opornika i
częstościornierza. Częstościomierz mierzy liczbę impulsów /na sekundę. Przy
liczbie przewodzących wycinków komutatora K liczbę obrotów na minutę
wyznacza się z zależności n = 60//K.
Do pomiaru dużych prędkości obrotowych można użyć częstości o mierzą
języczkowego odpowiednio wyskalowanego. Na badanej maszynie umieszcza się
częstościomierz. Drgania odpowiednich jego języczków są w rezonansie z
drganiami maszyny, zależnymi od jej prędkości obrotowej. Masa częstościomierza
musi być odpowiednio mała w stosunku do masy maszyny, aby drgania maszyny
nie były zbyt mocno tłumione.
Pomiar prędkości obrotowej za pomocą stroboskopu
Stroboskopowa metoda pomiaru prędkości obrotowej badanej maszyny odznacza
się tym, że wprowadza bardzo mały moment dodatkowy, hamujący badaną
maszynę (jeśli na wale maszyny umieszcza się niewielką tarczę) albo w ogółe nie
wprowadza żadnego dodatkowego momentu hamującego. Najprostszym
stroboskopem jest zwykła lampa łukowa zasilana z sieci prądu przemiennego o
częstotliwości/ Lampa ta zapala się 2/razy na sekundę. Przy skierowaniu światła tej
lampy na koniec wału badanej maszyny, na której jest narysowana promieniowa
kreska, przy prędkości wału n = f obr/s (synchroniczna prędkość maszyny
synchronicznej o 2p — 2) obserwator widzi wal z pozornie nieruchoma kreską,
stanowiącą średnicę wału.
Dla uzyskania możliwości ciągłego pomiaru prędkości obrotowej o dowolnej
wartości należy użyć lampy błyskowej zasilanej ze źródła o zmiennej
częstotliwości
Pomiar prędkości obrotowej za pomocą prądniczki
tachometrycznej
Pomiar prędkości obrotowej za pomocą prądnicy tachometrycznej (wyglądem
i budową bardzo zbliżona do małego silnika prądu stałego) znany jest od bardzo
dawna. Istota tej metody, to bezpośrednie, mechaniczne (za pomocą kół zębatych
i przekładni pasowych) sprzężenie osi prądnicy z wirującą osią kontrolowanego
elementu.
Prądnica tachometryczna jest źródłem napięcia stałego proporcjonalnego
do wielkości prędkości obrotowej swojej osi, natomiast nachylenie charakterystyki
(U/w) zależy od konkretnego modelu prądnicy.
Podstawowe zalety tej metody to:
- natychmiastowy pomiar aktualnej prędkości obrotowej,
- duża dokładność pomiaru,
- możliwość dokładnego odczytu zmierzonej wielkości
przez urządzenia z wejściem analogowym np. woltomierze cyfrowe, systemy
mikroprocesorowe z kartą przetworników analogowo-cyfrowych itp.
- krótki czas reakcji na zmianę prędkości.
Niestety metoda ta ma również kilka wad, które w skuteczny sposób odstraszają
potencjalnych klientów:
- duże problemy i koszty związane z poprawnym i niezawodnym mechanicznym
sprzężeniem prądnicy tachometrycznej z mechaniką maszyny lub urządzenia.
Mam tu na myśli konieczność wykonania odpowiednich kół zębatych a później
całej przekładni.
- konieczność ingerencji w mechanikę urządzenia,
- wysoki koszt pr¹dnicy tachometrycznej,
- konieczność okresowych konserwacji i przeglądów.
Charakterystyka prądnicy prądu stałego jest liniowa, gdyż wartość indukowanej
SEM, zgodnie ze wzorem E k * n jest wprost proporcjonalna do prędkości
obrotowej, dlatego maszyny te często wykorzystywane są jako tachometry, gdyż
znając stałą konstrukcyjną prądnicy i napięcie na jej zaciskach w łatwy sposób
możemy wyliczyć prędkość obrotową badanego silnika. Podobnie jest w
tachometrze asynchronicznym. Jest on bardziej niezawodny z tego powodu, że
wyeliminowano w nim wpływ styku komutator-szczotki. Natomiast jego wadą jest
to, że pomiaru kierunku wirowania nie można określić w sposób tak łatwy jak w
tachometrze prądu stałego.
3.2 Pomiar temperatury
W pomiarach temperatury wykorzystuje się zależność niektórych wielkości
fizycznych od temperatury.
W pierwszych termometrach wykorzystywano zmiany objętości cieczy w funkcji
zmian temperatury, obecnie wykorzystuje się również zmiany rezystancji,
ciśnienia i innych wielkości.
Temperatura jest w przemyśle najczęściej mierzoną wielkością fizyczną.
Pomiary temperatury występują we wszystkich właściwie gałęziach przemysłu.
Wymagane zakresy i dokładności pomiaru temperatury, żądana postać sygnału
wyjściowego oraz warunki pracy są przy tym bardzo różnorodne. Zależnie od
wymagań stosowane są różne rodzaje termometrów, wykorzystujące różne
zjawiska fizyczne. Można wyróżnić następujące rodzaje termometrów:
a) rozszerzalnościowe, w których wykorzystuje się zjawisko rozszerzalności
cieczy lub ciał stałych;
b) ciśnieniowe, wykorzystujące zależność ciśnienia cieczy lub gazu od
temperatury, przy stałej ich objętości;
c) rezystancyjne, w których wykorzystywana jest zależność rezystancji metali
(np. platyny, miedzi, niklu) oraz półprzewodników od temperatury;
d) termoelektryczne, w których wykorzystywane jest zjawisko powstawania siły
elektromotorycznej w obwodzie, w którym dwa złącza dwóch różnych metali
znajdują się w różnej temperaturze;
e) pirometryczne, w których wykorzystywana jest zależność spektralnego
rozkładu promieniowania emitowanego, od temperatury ciała emitującego.
Pomiar temperatury z użyciem czujników termorezystancyjnych sprowadza się do
pomiaru rezystancji, jedną ze stosowanych w miernictwie elektrycznym metod.
Najczęściej stosowane są w takim przypadku mostki niezrównoważone oraz
równoważone ręcznie lub automatycznie. Stosunkowo
duże zmiany rezystancji powodują, że w przypadku mostków niezrównoważonych
nie można pominąć nieliniowości charakterystyki mostka. Duża czułość
termorezystorów na zmiany temperatury powoduje konieczność (dla uniknięcia
błędów wynikających z samo nagrzewania) ograniczania płynącego przez nie
prądu. Jest to szczególnie ważne przy korzystaniu z termistorów. Błąd dodatkowy,
który należy uwzględniać przy pomiarach temperatury z użyciem
termorezystorów, jest powodowany temperaturowymi zmianami rezystancji
przewodów łączących. Ponieważ długość połączeń mostka z czujnikiem oraz
zmiany temperatury wzdłuż nich mogą być znaczne, błąd ten nie zawsze jest
pomijalny.
W czujnikach termistorowych, używanych do dokładnych pomiarów temperatury,
stosuje się termistory, których rezystancja w temperaturze pokojowej ma typową
wartość kilku kQ, a zależność ich rezystancji od temperatury pokrywa się z krzywą
standardową z błędem nie przekraczającym 0,lC0-0,20C (te same termistory mogą
być stosowane jako elementy kompensacji temperaturowej w różnych układach elektronicznych). Dzięki dużej wartości temperaturowego współczynnika rezystancji
stosowanie termistorów nie sprawia większych kłopotów. Poza tym są tanie, a ich
parametry są stałe w czasie. Nadają się bardzo dobrze do pomiarów temperatury
oraz do sterowania jej zmianami w zakresie od — 50°C do + 300°C.
Rezystancyjne termometry platynowe
Czujniki takich termometrów są wykonywane w postaci zwoju drutu z bardzo czystej
plytyny, której współczynnik temperaturowy jest dodatni i ma wartość około
0,4%/°C. Parametry termometrów platynowych wykazują nadzwyczaj dużą stałość w
czasie, a ich charakterystyki pokrywają się z krzywą standardową z błędem nie
większym niż 0,02 -=- 0,2°C. Termometry platynowe są dostosowane do pomiaru
temperatur w zakresie od - 200°C do + 1000°C. Nie należą do zbyt tanich
przyrządów.
Termometr kwarcowy
Termometr o dużej dokładności oraz powtarzalności pomiaru można otrzymać
wykorzystując zależność częstotliwości rezonasowej rezonatora kwarcowego od
temperatury. Chociaż normalnie celem, do którego dąży się przy projektowaniu
rezonatora kwarcowego, jest uzyskanie możliwie małej wartości współczynnika
temperaturowego częstotliwości rezonansowej, w tym przypadku wybiera się
taki rodzaj cięcia kwarcu, aby wspomniany współczynnik miał możliwie dużą
wartość. Duża dokładność pomiaru temperatury termometrami kwarcowymi
jest możliwa dzięki dużej dokładności pomiaru częstotliwości. Dobrym
przykładem seryjnie produkowanego termometru kwarcowego jest
przyrząd typu 2804A firmy Hewlett-Packard Jest to miernik mikroprocesorowy o
zakresie pomiaru temperatury od — 50°C do 150°C,
o błędzie absolutnym nie przekraczającym 40 milistopni (błąd zwiększa się, gdy
wychodzimy poza podany zakres) oraz o rozdzielczości pomiaru temperatury
równej 100 mikrostopai. Aby osiągnąć takie wartości parametrów, kwarcowy czujnik
danego przyrządu jest indywidualnie testowany i kalibrowany, a dane potrzebne do
obliczania temperatury są przez wytwórcę ; wprowadzone do pamięci systemu
mikroprocesorowego.
Pirometry i termografy
Interesującą metodą „bezdotykowego" pomiaru temperatury jest użycie klasycznego
pirometru. Jest to urządzenie umożliwiające obserwowanie żarzącego się obiektu
przez lunetę i porównywanie jego koloru z kolorem świecenia umieszczonego
wewnątrz pirometru drucika żarowego. Wartość temperatury odczytuje się ze
skali pirometru po doprowadzeniu, w wyniku zwiększania wartości prądu
płynącego przez drucik żarowy, do jednakowej jasności świecenia drucika i
obserwowanego obiektu. W czasie pomiaru oba źródła światła obserwuje się przez
czerwony filtr. Jest to wygodny sposób mierzenia temperatury obiektów bardzo
gorących, obiektów umieszczonych w miejscach niedostępnych (wnętrza pieców
lub komór próżniowych) oraz obiektów znajdujących się w środowisku
utleniającym lub agresywnym chemicznie, w którym nie można użyć termopar.
Pirometrami optycznymi można mierzyć temperaturę w zakresie od + 750°C do
3000°C, z błędem ok. 4°C w pobliżu dolnej granicy zakresu pomiarowego i ok.
20°C w pobliżu jego górnej granicy.
Opracowanie dobrych czujników podczerwieni umożliwiło rozszerzenie takiej
techniki pomiaru temperatury aż do zakresu normalnych temperatur
pokojowych, przez co weszła ona do codziennej praktyki pomiarowej. Na
przykład, firma Omega oferuje cały szereg pirometrów pracujących w
podczerwieni, z cyfrowym odczytem temperatury, pokrywających zakres od 30°C do +5400°C. Przez pomiar intensywności promieniowania podczerwonego,
ewentualnie dla kilku długości jego fal, wysyłanego przez oddalony obiekt, można
z dużą dokładnością określić temperaturę tego obiektu. Technika ta, nazywana
termografią, stała się obecnie popularna w najróżniejszych, nie związanych ze
sobą dziedzinach ludzkiej działalności, np. w medycynie (do wykrywania nowotworów) i w budownictwie, gdzie termografią budynku uświadamia projektantom
i użytkownikowi, którędy „wyparowują" dolary wydawane na ogrzewanie
pomieszczeń.
Pomiary wartości niskich temperatur
Przy projektowaniu i użytkowaniu systemów kriogenicznych (pracujących w
bardzo niskich temperaturach) spotyka się szczególne problemy, związane z
dokładnym pomiarem temperatury. Sposób pomiaru temperatury zależy przede
wszystkim od tego, jak bliska zera bezwzględnego (O K = — 273,16°C) jest wartość
mierzonej temperatury
Pomiar wielkości elektrycznych
W elektrotechnice praktycznej zawsze zachodzi konieczność pomiaru
pewnych niezbędnych wielkości elektrycznych. Na podstawie wyników z
pomiarów napięcia, prądu, częstotliwości itd. można określić właściwości
układów lub elementów, ich stan, sprawność itp. Wiele układów
pomiarowych składa się z zespołu przyrządów odpowiednio połączonych
elektrycznie ze sobą i na podstawie odczytów można wyznaczyć wartość
wielkości mierzonej np. metoda techniczna. W wielu przypadkach stosuje
się gotowe przyrządy lub przetworniki pomiarowe na których wynik pomiaru
podawany jest bezpośrednio.
Poszczególne metody pomiarowe różnią się pomiędzy sobą złożonością,
liczbą przyrządów pomiarowych oraz dokładnością otrzymanego wyniku
Pomiaru napięcia można dokonywać metodami bezpośrednimi lub
pośrednimi. Metoda bezpośrednia polega na pomiarze napięcia za pomocą
różnego typu woltomierzy, do metod pośrednich należą metoda
kompensacyjna i metoda techniczna.
Przy pomiarze bezpośrednim wartość badanego napięcia odczytuje się z
miernika lub innego wskaźnika. W powszechnie stosowanych woltomierza
elektronicznych z wyświetlaczem wartość zmierzonego napięcia jest
przedstawiana w postaci bezpośredniego wyniku. Przy pomiarze
woltomierzami analogowymi wychylenie wskazówki jest proporcjonalne do
wartości napięcia:
U = α Cv
gdzie: α ilość działek odczytanych z podziałki woltomierza, Cv - stała
woltomierza przy określonym zakresie pomiarowym. Zarówno przy
pomiarze woltomierzem elektronicznym i analogowym występuje
systematyczny uchyb wynikający z klasy użytego przyrządu.
Idealny woltomierz nie powinien pobierać w czasie pomiaru żadnego
prądu, jednak w warunkach rzeczywistych jest to w zasadzie niemożliwe.
Mierzą wartość napięcia dowolnego źródła napięcia należy pamiętać, że
wskazanie miernika Uvjest mniejsze od wartości rzeczywistej Us o spadki
napięć na impedancji wewnętrznej źródła napięcia Zs, spadki napięcia na
przewodach doprowadzających Zp oraz na impedancji wewnętrznej
woltomierza Zv. Znając dokładne wartości wszystkich impedancji można
wyznaczyć wartość rzeczywistą napięcia w badanym źródle
Us = Uv [1 + (Zs + Zp) / Zv)]
W celu wykonywania pomiarów napięcia z duża dokładnością woltomierze
buduje się tak, aby ich rezystancja wewnętrzne była możliwe jak
największa. Pomiar bezpośredni przynosi zadowalające wyniki jeżeli
rezystancja wewnętrzna miernika jest wielokrotnie większa od rezystancji
badanego źródła napięcia
Pomiar prądu może odbywać się – podobnie jak w przypadku pomiarów
napięcia- w sposób pośredni lub bezpośredni. W metodach bezpośrednich
wykorzystuje różnego typu amperomierze. W czasie pomiarów prądu
wpływa się w nieznacznym stopniu na wielkość mierzoną. Główną
przyczyną tego stanu jest niezerowa impedancja wewnętrzna miernika lub
rezystora pomocniczego. Amperomierz jest zawsze wtrącany w obwód
pomiarowy szeregowo i dlatego jego impedancja powinna być możliwe
najmniejsza, tak aby spadek napięcia na tym elemencie był pomijalnie
mały.
Dokładność pomiaru zależy w dużym stopniu od klasy amperomierza. W
miernikach analogowych wychylenie wskazówki jest proporcjonalne do
natężenia prądu, a największą dokładność osiąga się przy wychyleniu od
0,75 α do α. W zależności od typu mierników w wyniku podaje się
najczęściej wartość średnią lub skuteczną prądu, chociaż można spotkać
miernik gdzie zależność pomiędzy wskazaniem i natężeniem prądu jest
bardziej złożona. Przykładem tego typu przyrządu mogą być amperomierze
bimetalowe, gdzie wychylenie zależne jest nie tylko od natężenia prądu ale
także od czasu jego trwania.
Inną – powszechnie znaną pośrednią metodą pomiaru prądu – jest tzw.
metoda techniczna. W metodzie tej wykorzystuje się woltomierz do
pomiaru spadku napięcia na znanej rezystancji wzorcowej. Z prawa Ohma
można wtedy z łatwością wyznaczyć wartość prądu płynącego przez
rezystor. Warunkiem zachowania dużej dokładności pomiaru jest
zastosowanie takich elementów dla których impedancja woltomierza Zvjest
wielokrotnie większa od impedancji rezystora wzorcowego Zw. W
przypadku, gdy jednak nie można zachować tego warunku, pomiar
obarczony jest błędem systematycznym, który można wyliczyć z
zależności:
σ = Zw/ ( Zw + Zv)
Każde urządzenie elektryczne charakteryzuje się pewnym poborem mocy
elektrycznej, która jest przekształcana na inną formę mocy np.
mechaniczną, świetlna, cieplną itp. Znając wartość mocy pobieranej i
oddawanej można określić bilans energetyczny danego urządzenia lub
wyznaczyć jego sprawność. Moc jest zdefiniowana jako pewna praca w
jednostce czasu i dlatego jako jednostkę przyjmuje się [J / s]. W obwodach
elektrycznych jednak korzystniej jest się posługiwać się jednostkami, które
wynikają z iloczynu prądu i napięcia:
J / s => (J / C) x (C / s) => V x A
gdzie: J – dżul , s- sekunda, C – kulomb, V – wolt, A – amper. Moc
elektryczna może być mierzona w sposób bezpośredni, przy użyciu
mierników zwanych watomierzami lub w metodami pośrednimi np. metodą
techniczną. W obwodach prądu stałego w zasadzie odbiorniki pobierają
tylko moc czynną, w obwodach prądu zmiennego można wyróżnić moc
czynną, bierną i pozorną. W przypadku przebiegów odkształconych
definiuje się jeszcze tzw. moc odkształceń, która wiąże się z występującymi
harmonicznymi prądu lub napięcia
Zjawiska występujące w elektrotechnice mają zazwyczaj charakter
okresowy. W obwodach prądu przemiennego konieczna jest więc
znajomość częstotliwości występowania poszczególnych procesów.
Częstotliwość można zdefiniować jako liczbę okresów w określonym
czasie. Podstawową jednostką częstotliwości jest Hz. Przyrządy, które
wykorzystuje się do pomiaru częstotliwości często nazywane są
częstotliwościomierzami. Metody na których opierają swą zasadę działania
te przyrządy pomiarowe można podzielić na metody analogowe
(polegające na porównaniu badanego przebiegu z przebiegiem
wzorcowym) oraz metody zliczające (wykorzystujące algorytmy cyfrowe to
określenia ile razy w pewnym przedziale czasowym występował
powtarzający się cykl).
W elektrotechnice częstotliwościomierze budowane są do pracy przy
częstotliwościach sieciowych (szczególnie w energetyce) oraz przy
częstotliwościach akustycznych i większych. Poszczególne
częstotliwościomierze różnią się od siebie zakresem oraz dokładnością
pomiaru. Do najczęściej stosowanych należą przyrządy pomiarowe
elektroniczne lub cyfrowe. Inne metody stosowane są tylko w szczególnych
przypadkach
5. Założenia projektowe
Projektując układ sterowania z wykorzystaniem sterownika PLC firmy FANUC
serii 90-30 należy na początku określić obiekt lub obiekty sterowania pod
względem ilości potrzebnych sygnałów wejściowych i wyjściowych na podstawie
schematu elektrycznego układu. W niniejszej pracy obiektem sterowania jest
jednofazowy silnik magnetoelektryczny (silniki z trwałymi magnesami), zasilanym
z przemiennika częstotliwości do , którego są podłączone cztery czujniki.
Czujniki maja za zadanie mierzyć określone parametry takie jak , napięcie
zasilania, prąd zasilania, prędkość obrotowa oraz temperaturę silnika. Ponieważ w
sterowniku zostały wykorzystane wejścia analogowe prądowe , które zawierają się
w zakresie od 4mA do 20mA należy zaprojektować układy , które przetworzą
sygnały z czujników pomiarowych na sygnały prądowe zawierające się w zakresie
4-20mA.
5.1 Projekt stanowiska laboratoryjnego
5.2 Schemat ideowy do pomiaru temperatury
5.3 Projekt układu przetwarzania napięcia z termorezystora platynowego
przeznaczonego do pomiaru temperatury od 20oC do +100 oC na prąd zmieniający
się w granicach 4 do +20 mA
5.4. Dobór elementów:
Czujnik temperatury:
Elementem przetwarzającym w tym czujniku jest opornik platynowy Pt100.
Zasilany jest prądem stałym 1 mA. Czujnik może pracować w temperaturze od –40
o
C do 125oC. Dla temperatury 20oC element oporowy posiada rezystancję 107,99
a dla temperatury +100oC rezystancja wynosi 498,88 .
Rezystor dodatkowy Rd:
Rezystor Rd został tak dobrany aby jego rezystancja była jednakowa jak
rezystancja czujnika temperaturowego w temperaturze 20oC czyli
107.99 .
Tolerancja 0,01%.
Temperaturowy współczynnik rezystancji wynosi 1 ppm/oC.
Szumy 0,1 V/V.
Wzmacniacz numer 1.
Został użyty wzmacniacz AD 625C.
Wzmocnienie tego wzmacniacza ku1= 30,762
Błąd tego wzmacniacza dla wzmocnienia powyżej 256 wynosi 0,01%.
Temperaturowy współczynnik wynosi 5 ppm/oC
Rezystory Rf i rezystor Rg.
Rezystory Rf wynoszą 19.6 k
Rezystor Rg wynosi 1,317 k
Tolerancja 0,01%.
Temperaturowy współczynnik rezystancji wynosi 1 ppm/oC.
Szumy 0,1 V/V.
Wzmacniacz numer 2.
Został użyty wzmacniacz MXL 1001.
Wzmocnienie tego wzmacniacza wynosi 1
Źródło napięcia odniesienia.
Zostało użyte źródło AD 780BR
Źródło daje napięcie 3 V.
Błąd napięcia 1 mV
Temperatura pracy od –40 do +85 oC
Rezystor Rx:
Tolerancja 0,01%.
Temperaturowy współczynnik wynosi 1 ppm/oC
Szumy 0,1 V/V.
3. Równanie przetwarzania.
2* Rf
1 U ref * Ku 2
I we R p R d *
Rg
Rx
I wy
gdzie:
Iwe- prąd zasilania
Rp- rezystancja Pt100
Rd- rezystancja rezystora dodatkowego
2* Rf
Rg
Uref- napięcie źródła odniesienia
Ku2- wzmocnienie wzmacniacza numer 2
Rx- rezystancja przy źródle prądowym
1 - wzmocnienie wzmacniacza numer 1
Wartości poszczególnych elementów:
Iwe= 1 mA
Rp(20oC)= 107,99
Rp(+100oC)= 498,88
Rd= 107,99
ku1= 30,762 V/V
Rf= 19.6 k
Rg= 1,317 k
Uref= 3 V
Ku2= 1
Rx= 750
Dla rezystancji Rp(20oC)= 107,99 prąd wyjściowy wynosi 4 mA.
Dla rezystancji Rp (100oC)= 498,88 prąd wyjściowy wynosi 20 mA
5. Błędy dodatkowe
5.1. Błąd podstawowy w funkcji temperatury:
Ponieważ katalog nie podawał błędu dla wzmacniacza 2 nie uwzględniłem go w
obliczeniach.
Dla wszystkich rezystorów:
Rt = R*(1+*t)
R R
R t
*100
R
R * R
R
100
gdzie:
R- wartość elementu
= 1 ppm/C – dla wszystkich rezystorów
=5 ppm/C – dla wzmacniacza 1
t = 10
Rdt= 5,4E-3
Rgt= 0,066E-3
Rft= 0.98
Ureft= 9E-5
Rxt= 0.038
ku1t= 1,538E-3
I wytemp d Iwy * Rd d I wy * Rg 2 * d I wy * Rf
dRd
dRg
dRf
d
d
I wy * U
I
* Rx
ref dRx wy
dU
ref
d I wy * ku d I wy
1 dku
dku
1
2
Iwytemp=5.415E-7
I wytemp
I wytemp
wartosc
I wytemp 0.014
Iwytemp= 6,944E-7
* 100
I wytemp
I wytemp
* 100
wartosc
I wytemp 0.003472
Dla Iwy= 4 mA błąd podstawowy wynosi 0,014%.
Dla Iwy= 20 mA błąd podstawowy wynosi 0,0034%.
6.1 Schemat ideowy do pomiaru prędkości obrotowej
Dane prądniczki :
TYP PZTK 51-18
stała napięciowa 12,5V /1000obr/min,
n=8000obr/min
6.3 Układu przetwarzania napięcia z prądniczki tachometrycznej przeznaczonego
do pomiaru prędkości obrotowej od 0 do 8000 obr/min na prąd zmieniający się w
granicach 4 do +20 mA. Jako gotowy układ zastosowano Lumelowski przetwornik
typu P11Z-02-3-1. Jest to przetwornik napięcia na prąd. Maksymalne napięcie
wejściowe tego przetwornika jest rowne U=100V, czyli tyle ile uzyskamy z
prądniczki tachometrycznej przy maksymalnych obrotach. Na wyjściu
przetwornika uzyskujemy prąd w granicach od 4mA do 20mA
Rys.1 Schemat blokowy przetwornika
Schemat wejściowy przetwornika P11Z-02-3-1 separowany jest za pomocą
przekładnika pomiarowego TP, a następnie poprzez konwenter prądu K
zamieniany jest na sygnał napięciowy. Układ P realizuje funkcje przetwarzania
wartości skutecznej napięcia przemiennego na napięcie stałe.
Układ wyjściowy W standaryzuje sygnał wyjściowy przetwornika.
Zasilacz impulsowy Z dostarcza niezbędnych napięć.
Dane techniczne przetwornika :
- napięcie wejściowe 100 V
- prąd wejściowy 1A
- prąd wyjściowy 4....20 mA , Robc 0...500
- klasa dokładności 2
- napięcie zasilania 85...253 V
- częstotliowość sygnału wejściowego 45..65..500Hz
- temperatura otoczenia -20..23...55 oC
7.1 Schemat ideowy do pomiaru napięcia zasilania
Jako gotowy układ do mierzenia napięcia zasilania zastosowano niemal identyczny
„Lumelowski” przetwornik typu P11Z-04-3-1. Różni się on tylko od poprzednika
tym, że maksymalne napięcie wejściowe jest równe U=250v.
Rys.1 Bezpośredni pomiar napięcia
Rys.2 Pomiar pośredni za pomocą
Przekładnika napięciowego
6.1 Schemat ideowy do pomiaru prądu zasilania
W układzie do mierzenia prądu zasilania silnika został zastosowany po raz
Kolejny przetwornik z serii P11Z . Tylko tym razem jest to przetwornik I/I i jego
dokładne oznaczenie to P11Z-08-3-1. Maksymalny prąd wejściowy jest równy
I=1A, a wiec taki jak maksymalny prąd silnika. Wyjście przetwornika jest
standardowe i mieści się w granicach 4..20mA.
Rys.1 Pomiar bezpośredni prądu
Ryz.2 Pomiar pośredni prądu za pomocą
przekładnika prądowego
8. Oprogramowanie sterownika
LOGIMASTER
Programowanie sterowników serii 90 – 30 obejmuje dwa etapy:
-
konfigurowanie sterownika
-
programowanie sterownika
Oba etapy mogą być wykonane przy pomocy pakietu oprogramowania narzędziowego
LOGICMASTER 90, który uruchamia się na komputerze pracującym jako programator,
połączonym ze sterownikiem łączem szeregowym poprzez konwerter RS232 / RS 422.
Konfigurowanie ma na celu zadeklarowanie dla sterownika modułów jakie zostały
zainstalowane w kolejnych slotach płyty łączeniowej oraz jakie adresy fizyczne zostały
przypisane wejściom i wyjściom. Kolejnym etapem jest napisanie programu, wprowadzenie go
do pamięci sterownika, uruchomienie i testowanie. Przy pisaniu programu należy postępować
według niżej przedstawionych zasad.
-
Program użytkownika wykonywany jest zawsze według kolejności szczebli pojawiających
się w schemacie drabinkowym, poczynając od pierwszego szczebla aż do szczebla
zawierającego instrukcję END kończącą program. Zakłada się przy tym, że prąd przepływa
od lewej do prawej strony szczebla. Szczebel musi posiadać odpowiedni format i składnię, a
jeżeli występują w nim połączenia równoległe, to najpierw sprawdzana jest linia położona
najniżej.
-
Każdy szczebel może posiadać maksymalnie osiem linii równoległych, w każdej linii może
znajdować się do dziesięciu elementów połączonych szeregowo. Jeżeli występuje
konieczność użycia większej liczby elementów, to można przedłużyć szczebel do drugiej
linii za pomocą specjalnych przekaźników kontynuacji.
-
Jeżeli szczebel zawiera cewkę załączoną zboczem sygnału sterującego, to powinna to być
jedyna cewka w tym szczeblu.
-
Szczebel musi zawierać przynajmniej jeden styk przed cewką, instrukcją skoku lub inną
instrukcją sterującą, funkcją, blokiem funkcyjnym lub linią pionową.
-
Konstrukcja szczebla nie może zawierać odgałęzień mających początek lub koniec wewnątrz
innej gałęzi.
-
W szczeblu zawierającym funkcję lub blok funkcyjny nie mogą wystąpić rozgałęzienia
rozpoczynające się od linii pionowej, z wyjątkiem prowadzonych bezpośrednio do
cewek, a po prawej stronie bloku nie mogą wystąpić żadne styki.
Tekst programu w języku schematów drabinkowych tworzonego za pomocą pakietu
LOGICMASTER 90 zapisywany jest w programatorze do pliku w kartotece o nazwie takiej
samej jak nazwa programu. Program jest kompilowany szczebel po szczeblu na język
maszynowy, zrozumiały dla jednostki centralnej sterownika. W programie oprócz szczebli
tworzących właściwą część programu sterującego, występują również deklaracje zmiennych
umożliwiające nadawanie zmiennym w programie nazw symbolicznych oraz deklaracje bloków
programowych, na które może zostać podzielony program
")