CZUJNIKI MAGNETYCZNE
Wstęp
Czujniki magnetyczne to czujniki działające na zasadzie zmiany
sprzężenia między obwodem elektrycznym i magnetycznym lub w
wyniku wpływu pola magnetycznego na parametry materiałowe
sensora.
Materiały na czujniki: magnetyki (twarde i miękkie)
oraz inne mat. (np. półprzewodniki) czułe na działanie pól magnet.
Elektroniczny
kompas
(Honeywell)
Detektor
pojazdu
1
Podział czujników
Czujniki indukcyjne
indukcyjnościowe (zmiana L)
transformatorowe (zmiana M)
elektromagnetyczne
- indukowana SEM
- induk. prądy wirowe
Czujniki magnetogalwaniczne
hallotrony
magnetorezystory
magnetotranzystory
Czujniki magnetoelastyczne
Czujniki pola magnetycznego
magnetometry z nasycanym rdzeniem
z cewką indukcyjną
SQUID-y
2
Czujniki indukcyjnościowe
Def. indukcyjności własnej L cewki:
N B = L I
Indukcyjność ta wynosi w przybliżeniu:
L
o r N 2 A
2
N
R
l
gdzie R jest tzw. oporem magnetycznym (reluktancją)
R
l - długość
A - przekrój
r - wzgl. przenikalność magnet. rdzenia
l
A o r
Zmiany L uzyskuje się zmieniając N lub najczęściej R.
Cewka może stanowić część bardziej złożonego obwodu magnetycznego:
B
R
1
NI
R
2
NI
l
l
1
2
A A
o
o r
3
Czujniki indukcyjnościowe
O zmiennej szczelinie powietrznej
Moduł impedancji
Z R 2L 2 L2
R L R Cu R Z
Z L
Dla małych strat
N2
N2
N2
L
1 2l p
RFe R p R p
0 A
Z
1
lp
4
Czujniki indukcyjnościowe
O zmiennym przekroju szczeliny
5
Czujniki indukcyjnościowe
Czujnik różnicowy
Dwa dławiki o impedancjach Z1 i Z2
ze wspólną zworą
Szczeliny: l1 l0
l2 l0
U wyj R I R Î1 Î 2 R( I1 I 2 )
I1,2
U
kA 2
2 ( L0
) RS2
l0
Dla 0 < δ < 0.4l0
ΔI ~ δ
Słaba zależność Uwyj od częstości i napięcia
zasilania
6
Czujniki indukcyjnościowe
O zmiennym położeniu rdzenia
7
Czujniki indukcyjnościowe
Układ z dwiema cewkami połączonymi mostkowo
Przesunięcie rdzenia z położenia środkowego
powoduje pojawienie się napięcia Uwyj
U wyj
U we
1 L
2 L0
Dla małych przemieszczeń x
L
dL
x
dx
Stąd
U wyj
U we
1 dL
x
2 L0 dx
8
Czujnik transformatorowy
Transformator różnicowy (LVDT)
Separacja obwodu zasilania
i wyjściowego, duża liczba zwojów
obwodu wtórnego.
Kompensacja zakłóceń, szczególnie
temperaturowych (praca w temp.
od kriogenicznych do 1500C).
Z1 i Z2 połączone
przeciwsobnie,
w środkowym
poł. rdzenia
Uwyj = 0
Duże czułości pomiaru
przemieszczeń w zakresie
od 10-7m do 1 m, przy
błędzie nieliniowości <3%.
Uzyskuje się to przy
specjalnej konstrukcji
cewek.
9
Czujniki elektromagnetyczne z indukowaną SEM
Siła elektromotoryczna indukuje się na skutek zmiany strumienia
magnetycznego (prawo Faradaya):
df/dt
W rozwiązaniach sensorowych na ogół stosuje się magnesy stałe
a zmienny strumień uzyskuje się przesuwając obwód elektryczny w
polu B lub na odwrót – przesuwając źródło pola B lub zmieniając opór
magnetyczny przy spoczywającym obwodzie elektrycznym.
Ruchomy obwód elektryczny w stałym polu B
Czujnik prędkości liniowej
N` BA
d dx
v
dt
dt
N
xB A
l
10
Ruchomy obwód elektryczny w stałym polu B
Czujnik prędkości kątowej
N B A cos N B A cos t
d
N B A sin t
dt
Konieczna jest pewna minimalna prędkość kątowa.
Dla dużych ω nie istnieje potrzeba wzmacniania sygnału.
11
Zmiana oporu magnetycznego obwodu
Tachometr elektromagnetyczny
12
Ruch źródła B
Tachogenerator
Częstotliwość indukowanego napięcia:
f~n·p
p - ilość biegunów
n – ilość obrotów
Typowy zakres pracy:
150 – 3000 rpm
Dla mniejszych obrotów zwiększa się
ilość biegunów magnesów.
Ogólnie czujniki z indukowaną SEM
służą do:
• pomiaru prędkości obrotowych
• badania drgń:
x v dt k dt
dv
d
a
k
dt
dt
13
Obróbka sygnału z tachometru EM z tarczą zębatą
14
Czujniki elektromagnetyczne z wykorzystaniem
prądów wirowych
Istotne są indukowane prądy a nie siły elektromotoryczne
B
rot E
t
Wiroprądowe czujniki zbliżeniowe
Zmienne pole magnetyczne indukuje
wirowe pole elektryczne
Dynamika 1 – 50 mm
Rozdzielczość 0.1 mm
Cewka jest częścią obwodu rezonansowego generatora LC
15
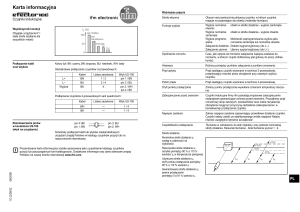
Wiroprądowe czujniki zbliżeniowe
W zbliżającej się tarczy (przewodniku) indukują się prądy wirowe, co powoduje
tłumienie i zmianę częst. drgań generatora.
Tłumienie zal. od σ, µ tarczy oraz częst. ω generatora.
Tarcza ferromagnet. daje silne tłumienie i działanie o większym zasięgu.
Przewodniki (Cu, Al.) tłumią słabiej.
Rozwiązaniem optymalnym jest stal magnetyczna (duże σ oraz µ).
Grubość tarczy d > δ (efekt naskórkowy)
1
0.5 0 r
dla stali: f(MHz)
δ (mm)
0.1
0.15
1
0.05
Bezkontaktowy pomiar zapewnia dobrą hermetyczność, co w efekcie daje
odporność na korozję, szerokie ΔT (-400C – 1250C), ciśnienie p ~5·105 hPa.
Zastosowania: obrabiarki, aut. spawarki, procesy przemysłowe.
16
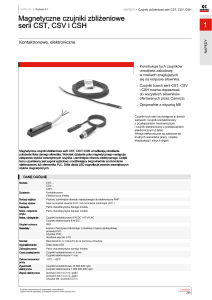
Czujniki magnetogalwaniczne
Hallotrony
Siła Lorentza:
F=qvxB
UH = (RH/d) I B = γ I B
dla próbki wydłużonej
W ogólności trzeba wprowadzić czynnik geometryczny
G i napięcie niezrównoważenia:
UH = γ G I B + Ur
Ur – napięcie niezrównoważenia (offset),
stała lub wolnozmienna wartość dla B=0.
17
Hallotrony
Stała Halla dla próbki z nośnikami jednego znaku wynosi:
RH = ± r/ nq
r – wsp. zależny od mechanizmu
rozpraszania nośników
n – koncentracja nośników
q – ładunek elementarny
Duży sygnał UH uzyskuje się dla próbek o dużej ruchliwości nośników
µ ( InSb, GaAs ):
EH/Ex = µBz
EH – pole Halla
Ex – pole wymuszające prąd
18
Kształty hallotronów
symbol
hallotronu
CC/HC –zamienne kontakty
CC - prądowe
HC - holowskie
Technologia IC
(pionowa)
Pole B styczne
do powierzchni płytki
19
Technologia hallotronów
- kształtki z materiałów litych
- cienkie warstwy
- mikrostruktury scalone:
- struktury MOS
- struktury epitaksjalne GaAs
- supersieci w technologii MBE (Molecular Beam Epitaxy)
- struktury bipolarne IC
Większość obecnie produkowanych hallotronów stosowanych komercyjnie
wytwarzana jest w technologii bipolarnej obwodów scalonych (IC).
20
Technologia hallotronów
Izolację struktury holowskiej
od reszty układu uzyskuje się
w wyniku istnienia przeciwnie
spolaryzowanych złącz p/n
Aktywną część struktury stanowi naniesiona epitaksjalnie warstwa n,
gdzie wdyfundowano izolacyjne obszary p oraz obszary kontaktów n+.
21
Parametry hallotronu
•
czułość bezwzględna:
SA = ∂ UH / ∂ B dla I = const
•
czułość względem prądu zasilania:
SI = SA / I
•
czułość względem nap. zasilania:
SU = SA / U
•
offset: równoważne pole Bo wytwarzające
napięcie niezrównoważenia Uo :
Bo = Uo / S.A.
22
Zastosowania hallotronów
Bezkontaktowe pomiary położenia
23
Bezkontaktowe pomiary położenia
różnicowe połączenie
czujników holowskich
24
Bezkontaktowy pomiar prądu
Wokół przewodnika z prądem ( prostoliniowego ) istnieje koncentryczne pole
magnetyczne
B= μoI/(2πr),
czyli B ~ I dla r = const
Prosta konstrukcja,
dobra liniowość wskazań
Dużą czułość uzyskuje się stosując rdzeń magnetyczny ze szczeliną δ ~ 1 mm,
w której umieszczony jest hallotron.
25
Bezkontaktowy pomiar prądu
Strumień pola B:
B
R
NI
R R
l Fe
0 r A
R
0 A
N – ilość zwojów
Rµ, Rδ – opory magnetyczne
rdzenia, szczeliny
Pole B w szczelinie:
B
0 N I
l Fe
r
0 N I
UH I
Zakres pomiaru prądu: 10A – kilka kA
26
Bezkontaktowy pomiar mocy
Korzysta się z faktu, że czujnik Halla wykazuje własności multiplikacyjne
Prąd obciążenia iL wytwarza pole B
i mierzony jest jak poprzednio:
B ~ iL
Napięcie uL jest transformowane
i wytworzony prąd iin zasila hallotron:
iin ~ uL
Napięcie wskazywane przez hallotron: u H iin B ur ( t ) k u L iL ur ( t ) k pL ur ( t )
Dla obciążenia rezystancyjnego:
u L ( t ) U 0 L cos t
iL ( t ) I 0 L cos t
u r ( t ) U 0 r cos t
1
u H ( t ) k U 0 L I 0 L ( 1 cos 2 t ) U 0 r cos t
2
Stosując filtr dolnoprzepustowy otrzymuje
się sygnał prop. do mocy średniej.
27