Jednostki Napięcie I=U/R [A] Natężenie U= IR [V] Moc czynna P= U*I*cosj
[Wat] Moc bierna Q=P*tgj [Var] Moc pozorna S=U*I [Va] Rezystancja R=U/I
[Om] Pojemność C [Farad], Indukcyjność L [Henr]pochodne: kilo103, mega106
giga 109 mili 10-3, nano 10-9 piko 10-12 współczynnik mocy cos fi? Cos fi= P/S,
gdzie P- moc czynna, S- moc pozorna.
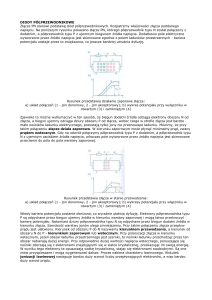
Transformator element indukcyjny o co najmniej 2 uzwojeniach(pierwotnym i
wtornym)sprzezonych magnetycznie,służacy do przenoszenia(transformacji)energi
elektrycznej lub sygnalu elektrycznego pradu przemiennego z pbwodu
pierwotnego do wtornego.Transf energii miedzy odwodami odbywa sie bez
podwyzszania mocy i zmainy czestotliwosci przenoszonego
sygnału.Budowa:uzwojenie pierw o liczbie zwojow z1 i wtorne o z2 zwojach sa
podlaczone odpowiednio ze zrodlem elektrycznym (pradu przemiennego)i
odbiornikiem energii elektrycznej.Prad przemienny I1 płynacy w uzwojeniu pierw
wytwarza w rdzeniu zmienny strumien magnety. Wskutek zmian tego strumienia
w obu uzwojeniach transf indukuja sie sile elektromot o wartosci proporcjonalnej
do szybkosci zmian strumienia i liczby zwojow danego uzwojenia. .Parametry:
przekladnia,moc znamionowa,napiecie znamionowe pier i wtorne,srednica
przewodu nawojowego uzw pier i wtor,prad stanu jałowego,i ndukcyjnosc,pasmo
przenoszenia.Sa konstruowane z mysla o zastosowaniu w konkretnym urzedzeniu
elektronicznym.Producenci maja na celu jak najszersza typilizacje i unifikacje
elementow, umozliwiajaca wydluzenie serii i obnizenie kosztow
wytwarzania.Klasyfikacja ze wzgledu na zast:sieciowe, glosnikowe, sprzegajace
m.cz. i w.cz., impulsowe,odchylania pionowego (do OTV),izolujace itp.
Transformator idealny element czterozaciskowy,majacy 2 uporzadkowane pary
zaciskow,jedna na wejsc i jedna na wyjs, charakteryzujacy sie bezstratnym
przenoszeniem energii elektrycznej(pradu przemiennego)miedzy obwodami
wejsciowym i wyjsciowym,oznacza to rownosc mocy chwilowych na wejsciu i
wyjsciu transformat.U1I1=U2I2
Metoda symboliczna zwiazana z zastosowaniem rachunku liczb
zespolonych,moze byc stosowana do obwodow liniowych w stanie ustalonym
pobudzanych sygnalem sinusoidalnym lub tez niesinusoi przy rozwinieciu go w
szereg Fouriera i korzystaniu z zasady superpozycji.Polega ona na przejsciu od
wartosci chwilowych do wart skutecznych zespolonych.Po otrzymaniu
rozwiazania symboli,wykonujac czynnosci odwrotne,uzyskuje sie rozwia czasowe.
Obwody rezonansowe(obwody drgajace)obw elektryczne złozone z elementow
reaktancyjnych(pojemnosci i indukcyjnosci), wyrozniajace sie tym ze moze w
nich wystapic zjawisko rezonansu elektrycznego.Obwody rezonansowe szereg i
rownoleg.Pulsacje w przy ktorej wypadkowa reaktancja lub susceptancja obw jest
rowna zeru nazywa sie pulsacja rezonansowa w0=1/pier LC.Jednym z
wazniejszych parametrow obw rezonansowego jest Dobroć Q obw szer
Qs=1/RpierL/C obw rown Qr=1/GpierC/L im wieksza jest dobroc obw tym
wezsza (bardziej ostra) staje sie krzywa rezonansowa,a wiec odw ma wieksza
selektywnosc i tym wolniej zanikaja w nim drgania swobodne.Wielkosc
Z0=pierL/C jest nazyw Impedancja charaktery lub falowa.
Dioda połprzewodnikowa element dwukoncowy o nieliniowej i niesymetrycznej
charakterystyce pradowo napieciowej zawierajacy zwykle pojedyncze złacze PN
lub MS.Dioda obudowana i zaopatrzona w koncowki(doprowadzenia)jest
elementem indywidualnym tzw dioda dyskretna.Diody w uklad scalonych czyli
tzw diody monolityczne maja bardziej złożona strukture,zazwyczaj stanowi ja
tranzystor bipolarny o odpowiedniej konfiguracji połaczen elektrod; w ukla
scalonych oprocz diod ze zlaczem PN sa stoso diody ze zlaczem MS zwane
diodami Schottky’ego lub diodami z bateria powierzchniowa.Koncowke diody
polaryzowana dodatnio dla pracy w kierunku przewodzenia nazywa sie anoda A a
druga koncowke polaryz ujemnie katoda K.Kryterium diod ze zwgledu na rodzaj
uzytego polprzewodnika np dioda krzemowa,germanowa,arsenkowogalowa.Własciwosci;parametry graniczne i charakterystyczne,kierunek
przewodzenia,kierunek wsteczny –zaporowy.
Diody prostownicze są przeznaczone do prostowania napięcia bądź prądu
przemiennego o małej częstotliwości. Prostowanie jest to przetwarzanie prądu
przemiennego na prąd jednokierunkowy. Diody zaczynają przewodzić dopiero po
przekroczeniu pewnej wartości napięcia w kierunku przewodzenia. Dla diod
krzemowych wynosi ona ok. 0,7V, a dla germanowych ok. 0,3 V. Diody
prostownicze są stosowane w układach prostowniczych urządzeń zasilających,
przekształcających prąd zmienny w jednokierunkowy prąd pulsujący. W układzie
prostowniczym dioda spełnia funkcję zaworu jednokierunkowego. Wykorzystuje
się tutaj właściwość polegająca na różnicy zdolności przewodzenia prądu w
kierunku wstecznym i w kierunku przewodzenia. Przez diodę prostowniczą na
ogół płyną duże prądy w kierunku przewodzenia, dlatego też stosujemy diodę
warstwową wykonaną z krzemu. Diody prostownicze mają małą rezystancję w
kierunku przewodzenia – rzędu pojedynczych Ω, co pozwala na uzyskanie dużych
sprawności prostowania. Parametry charakteryzujące diody prostownicze
napięcie przewodzenia – UF, przy określonym prądzie przewodzenia, prąd
wsteczny – IR , przy określonym napięciu w kierunku zaporowym, czas ustalania
się prądu wstecznego – t, pojemność – C, przy określonym napięciu
przewodzenia.
Diody uniwersalne o roznorodnym przeznaczeniu,mogace pracowac w roznych
zakresach czestotliw tj od bardzo malych-rzedu pojedynczych hercow,do
wielkich-rzedu kilkudziesieciu megahercow- sa to diody germanowe ostrzowe lub
krzemowe planarne.Diody uni charakteryzuja sie niezbyt duzymi wartosciami
napiec wstecznych i pradow przewodzenia. Stosowane sa glownie w
detektorach,mieszaczach,ogranicznikach, prostownikach.
Dioda Zenera (stabilizacyjna) zachowuje się w kierunku przewodzenia jak
zwykła dioda, ale ma bardzo dokładnie określone napięcie przebicia w kierunku
wstecznym. Diod tych używa się do pracy w kierunku zaporowym i wykorzystuje
tzw. napięcie Zenera tj. napięcie, przy którym prąd wsteczny diody gwałtownie
rośnie. Dlatego szeregowo z diodą Zenera należy włączać rezystor lub inny
element ograniczający prąd.
Dobra dioda Zenera ma precyzyjnie określone napięcie przebicia. Charakterystyka
diody w kierunku zaporowym musi wykazać bardzo wyraźne przegięcie. Poza tym
zmiany napięcia Zenera w funkcji temperatury powinny być możliwie małe.
Najlepsze parametry termiczne mają diody w zakresie napięć Zenera 5,6 - 6,2 V.
Dla napięć niższych współczynnik temperaturowy napięcia Zenera jest ujemny,
dla napięć wyższych dodatni. Często dla otrzymania elementów stabilizacyjnych o
bardzo małym współczynniku temperaturowym napięcia, łączy się diody o
dodatnim i ujemnym współczynniku w celu ich wzajemnej kompensacji. Czasami
łączy się zwykłą diodę krzemową (posiada ujemny współczynnik temperaturowy
przy pracy w kierunku przewodzenia) produkowaną seryjnie, z wysokonapięciową
diodą Zenera. Wypadkowa rezystancja szeregowa diod, powoduje jednak, że
charakterystyka przebicia Zenera będzie mniej stroma. Istnieją również diody
stabilizacyjne o napięciu poniżej 2 V. Noszą nazwę stabilitronów. Są to diody
pracujące w kierunku przewodzenia, nie są więc diodami Zenera.
Parametry charakteryzujące diody stabilizacyjne napięcie stabilizacji - UZ,
prąd stabilizacji – IZ, napięcie przewodzenia – UF, przy określonym prądzie
przewodzenia, prąd wsteczny diody – IR, przy określonym napięciu
wstecznym, rezystancja dynamiczna – rZ, której wartość zmienia się w
zależności od napięcia stabilizacji
energia elektronu zostaje zamieniona na kwant promieniowania
elektromagnetycznego. Przejścia tego rodzaju dominują w półprzewodnikach
z prostym układem pasowym, w którym minimum pasma przewodnictwa i
wierzchołkowi pasma walencyjnego odpowiada ta sama wartość pędu.
Jak działa LED?
W diodzie LED nic nie rozgrzewa się do tak wysokiej temperatury jak w żarówce. Co
prawda kluczowe zjawisko jest wspólne dla żarówki i diody LED- elementarne porcje
(kwanty) światła powstają, gdy elektrody oddają część swej energii. Tu jednak
podobieństow się kończy. W żarówce elektrony są przenoszone na wyższą orbitę pod
wpływem energii cieplnej, natomiast w diodach LED odbywa się to zupełnie inaczej.
Dioda LED, jak każda dioda, zawiera dwa obszary półprzewodnika. Można sobie
wyobrazić, iż są to dwa zetknięte ze sobą kryształy. W tej chwili najważniejsza jest
informacja, że w obu tych obszarach cały czas znajduje się mnóstwo elektronów. W
jednym z obszarów (swobodne) elektrony będące nośnikami prądu, dzięki dobraniu
odpowiedniego materiału i domieszek, "z natury" znajdują się na wyższej orbicie, w
wyższym paśmie energetycznym, czyli mają wyższą energię. Według określeń
książkowych jest to obszar typu n. W drugim (o którym mówi się, że nośnikami są
dziury), elektrony znajdują się na niższej orbicie i mają niższą energię. Jest to obszar typu
p. Dołączenie do diody LED zewnętrznego napięcia stałego o odpowiedniej
biegunowości wymusza ruch elektronów. Gdy elektrony o wyższej energii przechodzą do
obszaru o niższej energii-oddają część swej energii w postaci elementarnej porcjii, czyli
kwantu światła. Ilość energii zamieniana na światło jest tu określona z dużą
dokładnością-zależy od odległości orbit i związanej z tym różnicy energii. Czym większa
odległość między orbitami, tym większa jest ta oddawana energia. I tu tkwi cała
tajemnica barwy emitowanego światła. Barwa wyznaczona jest przez długość fali
świetlnej, a długość fali i odpowiadająca jej częstotliwość jest nierozerwalnie związana z
ilością oddawanej energii. Czym mniejsza porcja energii, tym fala jest dłuższa
(częstotliwość mniejsza), a wytworzone promieniowanie to podczerwień albo światło
czerwone, pomarańczowe czy żółte. Gdy energia jest większa, uzyskuje się światło
zielone, niebieskie, ewentualnie ultrafiolet.
Nietrudno się domyślić, że dla dwóch konkretnych obszarów różnica energii jest ściśle
określona, a więc jedna struktura LED może wytwarzać światło o jednej długości fali
(monochromatyczne). Oznacza to, że w przeciwieństwie do żarówek, ze światła LED nie
da się za pomocą filtrów uzyskać światła innego koloru. Użytkownik nie może też przez
zmianę natężenia prądu zmienić barwy światła, bo jest ona wyznaczona przez użyte
materiały. Wytworzenie diody LED o innym kolorze świecenia wymaga starannego
dobrania materiałów półprzewodnikowych i domieszek, by uzyskać właściwą dla danej
długości fali odległość orbit (odległość pasm energetycznych). Nie jest to zadanie łatwe,
o czym świadczy fakt, że niebieskie diody LED nadal są trudno dostępne, są gorsze i
droższe, niż "klasyczne" LED-y.
Wzmacniacz operacyjny jest odmianą wielostopniowego wzmacniacza
elektronicznego sygnałów elektrycznych, o dużym wzmocnieniu,
wewnętrznych sprzężeniach bezpośrednich, przeznaczony do pracy z
układami zewnętrznego sprzężenia zwrotnego. Sprzężenie zewnętrzne
zapewnia stabilność pracy wzmacniacza, decyduje o paśmie przenoszenia i
poprawia liniowość wzmacniacza i przede wszystkim określa funkcję jaką
spełnia wzmacniacz ( określa jego transmitancję operatorową). Współczesny
wzmacniacz operacyjny jest wykonany jako układ scalony, niekiedy w jednej
obudowie mieści się kilka wzmacniaczy tego samego typu. Współczynnik
wzmocnienia napięciowego wzmacniacza przy otwartej pętli wzmocnienia
jest rzędu 106 .
Sygnał nieróżnicowy – w przypadku gdy do wejść + i – zostaną
doprowadzone sygnały identyczne względem masy to napięcie na wyjściu
będzie równe 0. Sygnał różnicowy – w przypadku doprowadzenia napięcia
wejściowego + i - . Multiwibratory – układy generacyjne służące do
uzyskiwania przebiegów o kształcie zbliżonym do prostokątnego. Powstają
przez połączenie co najmniej dwóch wzmacniaczy pętlą dodatniego
sprzężenia zwrotnego. W zależności od sposobu pracy wyróżniamy
multiwibratory : a-stabilne, Bi-stabilne, poli-stabilne, mono- stabilne.
1. Charakterystyka prądowo- napięciowa diody prostowniczej UZ – napięcie
stabilizacji
UF – napięcie przewodzenia IR – prąd wsteczny rZ – rezystancja dynamiczna
2. Charakterystyka prądowo- napięciowa diody Zenera UZ – napięcie
stabilizacji,
UF – napięcie przewodzenia, IR – prąd wsteczny, rZ – rezystancja dynamiczna
Dioda elektroluminescencyjna (LED ang. Light Emitting Diode) - Diodę
elektroluminescencyjną zaliczamy do półprzewodnikowych przyrządów
optoelektronicznych, emitują one promieniowanie w zakresie światła
widzialnego, jak i podczerwieni. Pojawiła się w latach sześćdziesiątych. Jej
działanie opiera się na zjawisku rekombinacji nośników ładunku (rekombinacja
promienista). Zjawisko to zachodzi w półprzewodnikach wówczas, gdy
elektrony przechodząc z wyższego poziomu energetycznego na niższy
zachowują swój pęd. Jest to tzw. przejście proste. Podczas tego przejścia
Polaryzowanie zrównoważone – Tranzystory scalone wykonywane są na
wspólnym podłożu czyli mają jednakowe parametry. T1 jest podłączony
diodowo i służy do polaryzacji T2 - ustala prąd Ic2 (prąd kolektorowy). T1 i
T2 mają jednakowe parametry czyli: Ubet1=Ubet2 czyli Ic1=Ic2. Mamy
ustalony prąd kolektora T2 przez spolaryzowanie go za pomocą T1. Sygnał
wejścia jest doprowadzony do bazy T2. Źródło prądowe – stosowane często
w liniowych układach scalonych. Można uzyskać przez włączenie w obwód
emitera bardzo dużej rezystancji. Cechą każdego źródła jest bardzo duża
impedancja wewnętrzna. Stosunek R1/R2 nie ma wpływu na zmiany prądu
wyjściowego. Czyli stosunek rezystancji nie ulega zmianom pod wpływem
temperatury.
Stabilizatory impulsowe – układ regulacyjny nie pracuje w sposób ciągły ale
okresowa włącza i wyłącza napięcie wej.od obciążenia. Stąd nawet przy dużej
różnicy napięć Uwe-Uwy układ ma wysoką sprawność bo straty występują gdy
układ załącza źródło do obciążenia. Stosowane tam gdzie ekonomika zasilania
jest ważna. Idea pracy polega na wykorzystaniu tranzystora jako klucza
przełączającego sterowanego impulsami podawanymi na bazę. W obwodzie
prądu jest dioda, która załącza obw.wy gdy tranzystor jest odcięty. Napięcie na
kolektorze na przebieg fali prostokątnej o zmiennym wypełnieniu czyli t1/t2
gdzie t1- czas przewodzenia. W obwodzie znajdują się też dławik i
kondensator, które tworzą filtr pełniący istotną funkcję w układzie –
zmniejszają tętnienia Uwy, które osiąga wartość średnią napięcia na kolektorze
tranzystora kluczującego.
Układ stabilizacji częstotliwości - stabilność częstotliwości zależy od:
stałości indukcyjności, stałości pojemności, od sprzężeń w obwodzie
wzmacniającym. Czyli zakłócenia w dużej mierze zależą od częstotliwości.
tranzystor
półprzewodników
złącza
Tranzystor bipolarny –
z trzech warstw
, który zbudowany jest
o
różnym rodzaju przewodnictwa, tworzących dwa
PN
; sposób polaryzacji złącz determinuje stan prac tranzystora.
Tranzystor posiada trzy końcówki przyłączone do warstw półprzewodnika,
nazywane: emiter (E), baza (B), kolektor (C). Ze względu na kolejność warstw
półprzewodnika rozróżnia się dwa typy tranzystorów: pnp oraz npn; w
elektrony
dziury
tranzystorów
tranzystorach npn nośnikiem prądu są
tranzystorach pnp
,w
. Układy TTL zbudowane z bipolarnych
, są zasilane napięciem stałym 5 V.
Sygnał TTL jest niski (logiczne "0"), gdy potencjał ma wartość od 0 V do 0,8
V w odniesieniu do masy, wysoki (logiczna "1") przy wartości potencjału
między 2 V a 5 V. Polaryzacja tranzystora NPM tranzystor NPN musi być
spolaryzowany tak by kolektor miał duży potencjał dodatni
względem emitera, a baza - mały potencjał dodatni względem emitera
Watomierz to miernik wskazujący aktualny pobór Mocy Czynnej w obwodzie.
Posiada cztery zaciski wejściowe - dwa prądowe i dwa napięciowe.
Moc prądu(czynna) zależy od napięcia i natężenia prądu elektrycznego zgodnie
ze wzorem P = U * I * cosφ, gdzie φ to przesunięcie fazy pomiędzy napięciem
a prądem.
Zaciski początkowe cewki prądowej i napięciowej oznaczone są gwiazdką.
Cewkę prądową watomierza włącza się szeregowo z odbiornikiem, a
napięciową równolegle.
Watomierze budowane są jako mierniki:
elektrodynamiczne
ferrodynamiczne
indukcyjne
Najczęściej spotykanym typem miernika jest watomierz elektrodynamiczny.
Przeznaczony jest do pomiaru mocy w obwodach prądu stałego i
przemiennego. Zbudowany jest z ruchomej cewki napięciowej i nieruchomej
prądowej. Dla uzyskania odpowiedniego zakresu napięcia, stosuje się posobnik
połączony szeregowo z cewką napięciową i zabudowany w mierniku.
Przekładniki prądowe pozwalają zarówno na pomiar prądu zmiennego jak i
stałego. Ich konstrukcja przypomina konstrukcję transformatora: na rdzeniu
ferromagnetycznym nawinięte są dwa uzwojenia. Przez uzwojenie pierwotne
płynie prąd którego wartość jest mierzona, natomiast do uzwojenia wtórnego
podłącza się układ miernika.
Przekładnik prądu zmiennego
O przekładniku prądu zmiennego można powiedzieć, że jest to transformator
jednofazowy małej mocy pracujący w stanie zbliżonym do zwarcia. Uzwojenie
wtórne zwykle zwarte jest przez przyrząd pomiarowy. Stosunek wartości
prądów w obu uzwojeniach jest wartością stałą i nazywa się przekładnią
prądową. Dlatego z pomiaru małego prądu płynącego przez uzwojenie wtórne
można dzięki wartości przekładni prądowej wyznaczyć wartość dużego prądu
płynącego przez uzwojenie pierwotne.
Przekładnik prądu stałego
Przekładnikiem prądu stałego jest tak zwany transduktor. Zbudowany jest z
dwóch symetrycznych rdzeni z blach ferromagnetycznych o prostokątnych
pętlach histerezy. Na rdzeniach nawinięte są uzwojenia pierwotne i wtórne.
Uzwojenie pierwotne to niewielka ilość zwojów z mierzonym prądem,
nawinięte zgodnie na obu rdzeniach. Uzwojenie wtórne to wiele zwojów
cieńszego drutu nawijanego przeciwsobnie. W uzwojenie wtórne włączony jest
amperomierz oraz zasilanie napięciem przemiennym. Zasilanie napięciem
przemiennym podmagnesowuje rdzenie stając się dzięki temu "nośną" dla
sygnału stałoprądowego. W obwodzie pierwotnym nie indukuje się prąd
przemienny dzięki symetrii obu rdzeni oraz przeciwsobnemu nawinięciu cewek
wtórnych.
Zastosowania przekładników prądowych:
rozszerzenie zakresu pomiarowego amperomierzy
galwaniczne oddzielenie obwodów pomiarowych i zabezpieczeniowych od
głównego toru prądowego
Uzwojenie wtórne przekładnika włączonego do obwodu zawsze musi być
zwarte. Najczęściej zwierane jest poprzez amperomierz, cewki prądowe
watomierzy i liczników, przetworniki pomiarowe, cewki zabezpieczeń
nadprądowych itp. Jeśli uzwojenie wtórne nie jest wykorzystane musi być
zwarte przewodem.
Rozwarcie uzwojenia wtórnego przy przepływie prądu przez uzwojenie
pierwotne powoduje powstanie dużego strumienia magnetycznego i strat w
rdzeniu, co powoduje silne nagrzewanie rdzenia, a nawet uszkodzenie izolacji
uzwojeń. Powoduje również powstanie wysokiego napięcia w miejscu
rozwarcia co może doprowadzić do powstania łuku elektrycznego i porażenia
osoby dokonującej takiej czynności.
Wtórnik emiterowy – wzmacniacz tranzystorowy w układzie wspólnego
kolektora – cechuje wzmocnienie ku=1. Wzmacniacz ten może być stosowany
jako bufor dopasowujący rezystancję obwodu sterowanego do obwodu
sterującego, minimalizując obciążenie obwodu sterującego spowodowane
przez wtórnik. Wynika to z istotnej cechy wtórnika – jego wysokiej rezystancji
wejściowej i niskiej rezystancji wy.. Sygnał wejściowy jest równy
potencjałowi emitera tranzystora T1 (spadkowi napięcia na oporniku
emiterowym Re. Współczynnik wzmocnienia napięciowego ku=1 oznacza, iż
napięcie wyjściowe Uwy nadąża za napięciem wejściowym Uwe – czyli
powtarza je. Stąd bierze się nazwa układu – wtórnik emiterowy.
Pomiar rezystancji we i wy. Wartość rezystancji Rwe określa się za pomocą
oscyloskopu i rezystora Rs (opornik dekadowy) włączonego w szereg z
generatorami sygnału, na którego wyjściu ustawia się napięcie Uwe0.
Początkowa wartość Rs0=0 jest stopniowo zwiększana do momentu uzyskania
napięcia Uwe1, mierzonego w punkcie Pp, równego połowie wartości
początkowej Uwe0, czyli Uwe1=0,5 Uwe0. Odczytana wówczas wartość Rs1
jest równa rezystancji wejściowej wtórnika – Rwe=Rs1. W tym stanie spadek
napięcia na rezystancji wejściowej wtórnika Uwe i spadek napięcia na
rezystancji Rs1 włączonej w szereg z wejściem są sobie równe. Stan ten
wykrywa się odczytując z ekranu oscyloskopu amplitudę sygnału wejściowego
w punkcie Pp. Podobnie mierzy się wartość rezystancji wyjściowej równej
Rwy=Rs/beta. Sygnał na we wtórnika podawany jest przez rezystancję
Rs=Rwe (zachowane jest dopasowanie energetyczne źródła do układu
sterowanego – wtórnika). Następnie, przy stałej amplitudzie sygnału
sterującego Us zmienia się wartość rezystancji obciążenia Rl, przez dołączenie
rezystora Rl1=Rl równolegle do rezystora Rl. Zmienia się wtedy poziom
napięcia wyjściowego Uwy – maleje do poziomu Uwy1. Znając poziom tego
napięcia przez dołączeniem (Uwy) oraz po dołączeniu Rl1 (Uwy1) oraz zmianę
rezystancji obciążenia można wyznaczyć wartość rezystancji wyjściowej
wtórnika. Wykorzystuje się tu zależność proporcjonalności wartości spadku
napięcia na oporniku emiterowym do wartości jego rezystancji: Rwy||Rl>Uwy, Rwy||Rl||Rl1->Uwy1 Rwy||((rl*Rl1)/(Rl+Rl1))->Uwy1.
Pomiar mocy i energii pradu jednofazowego. Kompensacja mocy biernej.
Odbiornik zawierający elementy RLC pobiera zarówno moc czynna jak i
bierną. Elementy reaktancyjne – cewka, dławik (ich cechą jest indukcyjność)
pobierają moc bierną indukcyjną a kondesator (jego cechą jest pojemność)
pojemnościową.
Pomiar energii: Układ RLC pobiera z źródła moc czynną P i moc bierną Q.
Ilość pobranej energii mierzy się licznikami odpowiednio energii czynnej i
biernej – ich budowa i zasada działania jest podobna, Licznik energii mierzy
wartość chwilową pobieranej mocy i jednocześnie całkuje tę wartość, wartość
całki jest zachowywana w liczydle mechanicznym – bębenkowym albo w
nieulotnej pamięci elektronicznej. Współczesne liczniki energii elektrycznej
pozwalają mierzyć energię przy prądzie do kilkudziesięciu amperów. Przy
większych mocach stosuje się przekładniki prądowe, których przekładnia
prądowa pozwala dopasować poziom natężenia prądu doprowadzonego do
licznika. W licznikach indukcyjnych (z tarczą obrotową) całkowanie odbywa
się przez zliczanie liczby obrotów tarczy – proporcjonalnych do pobieranej
mocy czyli pobieranej energii. Wynik zapamiętywany jest w liczydle, którego
stan hest okresowo odczytywany. Licznik charakteryzuje: stała licznika Cl
[obr/kWh] albo [imp/kWh], liczba faz toru zasilania, napięcie oraz prąd
znamionowy i maksymalny jaki może przepływać przez cewkę prądową
licznika. Współczesne wykonania liczników energii zawierają układ
generujący impulsy o częstotliwości propor. do wartości średniej mocy w
danym odstępie czasu. Informacja ta służy do zdalnego odczytu stanu licznika.
Typowy licznik może zliczać energię w dwóch strefach dobry oraz zapamięt.
wartość mocy maksym.w danym okresie rozliczeniowym. Licznik elektr. Nie
zawiera części, które się zużywają w trakcie eksploatacji. Pom. Mocy jest
realizowany za pomocą czujnika Halla, a wynik całkowania mocy chwilowej
czyli ilość pobranej energii zapisywany jest w rejestrach układu pamięci
nieulotnej licznika. Licz. Zawiera rejestry do zapisu wart. Mocy maksymalnej
15-minutowej, łącznie z datą i czasem jej wystąpienia. Z reguły jest licznikiem
wielostrefowym i w zależności od typu realizuje funkcje przydatne w proces.
zarządzania energią. Stała l.: Cl=n/A [imp/kWh], A=P*t/10(3)*3600 [kWh].
Kompensacja mocy biernej indukcyjnej. Moc bierna indukcyjna pobierana
jest m.in przez świetlówki standardowe (ich oprawa zawiera statecznik w
postaci dławika) i silniki. W celu ograniczenia jej poboru ze źródła energii
stosuje się kompensację indywidualną (i zbiorową dla grupy silników) przez
spowodowanie poboru energii biernej pojemnościowej przez odbiornik o
charakterze indukcyjnym. Jest to możliwe wówczas kiedy dołączy się
kondesator równonegle do zacisków tego odbiornika. Dąży się do tego, aby
współczynnik mocy cosfi był bliski jedności albo do stanu, w którym grupa
odbiorników pobiera moc bierną taką, że tgfi<=tgfidop=(w przybliżeniu)0,4
czyli tgfi przyjmuje wartość nie większą niż narzucona przez dostawcę energii.
Wzmacniacz op. - (pomiar pasma przenoszenia). Pomiar wykonuje się
łącząc układ według schematu układu do pomiaru charakterystyk we-wy.
Częstotliwość generatora ustawia się na wartość z przedziału 0-10Hz,
amplitudę sygnału z generatora dobiera się w zależności od współczynnika
wzmocnienia wzmacniacza, tak aby sygnał wy nie przekraczał dozwolonego
poziomu. Wartość napięcia Uwy odczytuje się z ekranu oscyloskopu i
przyjmuję się ją za wartość Uwy max. Następnie zwiększa się częstotliwość
tak aby uzyskać poziom napięcia Uwy=0,707 Uwy max. Poziom sygnału
wyjściowego uzyskuje wtedy wartość o 3 dB niższą od poziomu
maksymalnego. Częstotliwość odczytana z oscylokopu odpowiada górnej
częstotliwości przenoszonego pasma Bw-fgr, zwanego trzydecybelowym.
Diody półprzewodnikowe: Półprzewodniki w stanie czystym.
Podstawowym materiałem do produkcji elementów półprzewodnikowych jest
krzem Si, posiada 14 protonów w jądrze i tyle samo elektronów
(rozmieszczonych na trzech powłokach (2-8-4). Krzem zastąpił german Ge (32
protony w jądrze oraz elektrony na czterech powłokach 2-8-18-4). Atomy obu
pierwiastków posiadają po cztery elektrony walencyjne. Atomy łącząc się w
cząstki tworzą kryształ, w którym występują wiązania kowalentne jako skutek
wzajemnej reakcji elektronów walencyjnych. Każdy z atomów sieci
krystalicznej czystego krzemu na swojej powłoce zewnętrznej może posiadać
do 8 elektronów przejętych od atomów, z którymi sąsiaduje. Współdzielenie
elektronów walencyjnych daje wiązania kowalentne – na każdy elektron równo
oddziaływują dwa atomy. Odległości pomiędzy pasmami energetycznymi oraz
szerokości przerw są stałe dla danego atomu, odległości powłok od jądra atomu
zależą od energii którą atom przyjął z otoczenia.
Rozkład energii elektronów w atomie jest związany z istnieniem pasm i
przerw energetycznych. Im dalej od jądra położony jest elektron tym większa
posiada energie i luźniej jest związany z protonami jądra. W przypadku
przyjęcia energii z otoczenia (np. W postaci ciepła albo promieniowania
świetlnego) elektron walencyjny może przeskoczyć z pasma walencyjnego na
wyższy poziom energetyczny – do pasma przewodnictwa. Staje się wtedy
elektronem swobodnym czyli nośnikiem ładunku ujemnego.
Atom, opuszczony przez elektron staje się jonem dodatnim – liczba protonów
w jądrze jest większa od liczby elektronów na rbitach atomu. W paśmie
walencyjnym po elektronie, który przeskoczył do pasma przewodnictwa
powstaje dziura. Rekombinacja pary elektron-dziura następuje wówczas kiedy
elektron z pasma przewodnictwa powróci do pasma walencyjnego, na skutek
utraty energii, którą przyjął przez przeskokiem do pasma przewodnictwa.
W temperaturze pokojowej przeskoki elektronów do pasma przewodnictwa
oraz towarzysząca im generacja dziur w paśmie walencyjnym odbywają się w
sposób stochastyczny w sieci krystalicznej krzemu. Wolne elektrony
rekombinują z dziurami dlatego nie występują w krysztale wolne nośniki
ładunku elektrycznego. Domieszkowanie. Celowe wprowadzanie
zanieczyszczeń do czystego półprzewodnika, zwane domieszkowaniem,
gwałtownie zwiększa liczbę nośnków ładunku elektrycznego (elektronów albo
dziur) oraz obniża rezystowność materiał podstawowego (podłoża). Domieszka
w postaci arsenu, fosforu, antymonu (posiadają 5 elektronów walencyjnych)
daje półprzewodnik typu n. Pięciowartościowy atom tworzy wiązania
kowalentne z 4 atomami krzemu, pozostaje jeden elektron dodatkowy w
paśmie przewodnictwa, nie jest związany z żadnym atomem. Liczbę tych
elektronów można zmieniać przez ilość (koncentrację) domieszki. Krzem z
domieszką pięciowartościową staje się materiałem niosącym ładunek ujemny –
elektronów, które w półprzewodniku typu n stanowią nośnik większościowy.
W półprzewodniku typu n występują także dziury (nośnik ładunku
dodatniego), które nazywa się nośnikiem mniejszościowym.
Domieszka w postaci pierwiastków trójwartościowych: glinu, boru, galu, indu
(posiadają trzy elektrony walencyjne), powoduje, że każdy atom domieszki
tworzy wiązania kowalentne z czterema atomami czystego półprzewodnika.
Trzy elektrony są związane a w miejscu czwartego tworzy się dziura. Ilość
dziur można regulować przez zmianę koncentracji domieszki. Materiał
półprzewodnika uzyskuje ładunek dodatni, związany z powstaniem dziur, które
są w półprzewodniku typu p nośnikiem większościowym. Są w tym
półprzewodniku również elektrony, które stanowią nośnik mniejszościowy.
Złącze p-n. Domieszkowanie krzemu w taki sposób aby utworzyć obszar o
przewodnictwie p i n spowoduje powstanie złącza p-n między tymi obszarami.
Powstały w ten sposób element nazywa się diodą półprzewodnikową. Obszar n
zawiera elektrony a obszar p dziury. Złącze p-n ma istotne znaczenie dla
sposobu działania diod półprzewodnikowych, tranzystorów i innych
elementów półprzewodnikowych. Pewna liczba elektronów, które dyfundują
bezładnie w obszarze n trafia w pobliże złącza i dyfunduje do obszaru p,
rekombinując z dziurami w nim zawartymi. W obszarze n każdy z atomów
domieszki tworzy dziurę o ładunku dodatnim, a trójwartościowy atom z
obszaru p staje się jonem ujemnym. Na skutek rekombinacji par elektro-dziura
w obszarze złącza powstaje warstwa zubożona o takiej szerokości, że żaden
elektron nie może przekroczyć tej warstwy. Powstaje bariera potencjału Ub
wskutek istnienia ładunków dodatnich i ujemnych po obu stronach warstwy
zubożonej. Dla krzemu wartość tego potencjału wynosi ok 0,7V a dla germanu
ok. 0,2-0,3V. W miarę wzrostu temperatury złącza potencjał ten maleje (jest
odwrotnie proporcjonalny do temperatury).
Pasma energetyczne. W półprzewodniku typu p powstałym przez
domieszkowanie atomami trójwartościowymi poziomy energetyczne są nieco
wyższe niż w półprzewodniku typu n, domieszkowanym atomami
pięciowartościowymi. Wynika to z mniejszego oddziaływania sił jądraatomów
3wart (orbity są bardziej oddalone od jądra). Pasma przewodnictwa i
walencyjne w obu rodzajach półprzewodników pokrywają się na pewnym
obszarze, dlatego elektrony o wyższym poziomie energii z pasma
przewodnictwa obszaru n po przejściu do obszaru przewodnictwa obszaru p i
utracie energii mogą rekombinować z dziurami pasma walencyjnego obszaru p.
Wskutek dyfuzji elektronów tworzy się warstwa zubożona złącza.
Poziom energii w obszarze n obniża się, bo elektrony o wyższym poziomie
energii przeszły do warstwy p. W chwili kiedy wyższy poziom energii w
obszarze n osiągnie dolny poziom energii obszaru p ustaje dyfuzja elektronów
do obszaru p i zostaje osiągnięty stan równowagi. Przez złącze p-n nie
przepływa w tym stanie żaden ładunek.
Polaryzacja diody. Podstawową funkcją diody jest umożliwienie przepływu
prądu w jednym kierunku i zapewnienie braku przewodzenia w kierunku
odwortnym. Oba stany są wyznaczone polaryzacją złącza p-n – w kierunku
przewodzenia (F- forward) i w kierunku zaporowym (R – reverse), zależną od
sposobu przyłożenia napięcia do złącza rezystor R ogranicza wartość natężenia
prądu płynącego w obwodzie. Napięcie polaryzacji, pochodzące od źródła
zewnętrznego względem złącza p-n wyznacza warunki pracy elementów
półprzewodnikowych budowanych z warstwa półprzewodników tworzących
złącza p-n (tranzystory, tyrystory). Bariera potencjału warstwy złącza p-n Ub
może być opisana jako źródło napięcia włączonego w kierunku przeciwnym do
kierunku SEM źródła polaryzującego złącze, czyli obniża poziom napięcia
polaryzującego złącze Uf o wartość Ub. Na złącze oddziaływuje suma napięć
Uf=Uf-Ub>0. Dioda przewodzi prąd If dopiero po przekroczeniu bariery Ub
czyli gdy Uf-Ub>0. Spadek napięcia na rezystancjach warstwy n i p, wywołany
przepływem prądu If przez złącze p-n, jest pomijalnie mały.
Polaryzacja w kierunku zaporowym. Wtedy kiedy napięcie polaryzujące
złącze w kierunku zaporowym – biegun dodatni źróła polaryzującego
połączony jest z obszarem p a ujemny z obszarem n złącza p-n – obszar
zubożony rozszerza się i ustaje ruch ładunków w złączu – zanika prąd
wywołany ruchem ładunków większościowych. Opuszczanie złącza przez
ładunki w nim zawarte trwa przez krótką chwilę po pojawieniu się napięcia
polaryzacji wstecznej (zaporowej). Warstwa złącza działa tak jak by była
izolatorem (nie ma w niej ładunków). Na obu krańcach tej warstwy istnieją
ładunki elektryczne o przeciwnych znakach (ustalonych przez polaryzację
biegunów źródła) stąd złącze p-n i obszary z ładunkami zachowują się jak
kondesator o określonej pojemności elektrycznej C, malejącej nieliniowo wraz
ze wzrostem napięcia polaryzującego. Prąd upływu i napięcie przebicia
złącza p-n. Po przyłożeniu napięcia Ur polaryzującego złącze p-n bardzo
szybko zanika prąd większościowy ale powstaje prąd upływu wywołany
obecnością nośników mniejszościowych. Wartość natężenia prądu upływu jest
rzędu 10nA-10mikroA, krzem ma niższe wartości niż german, Ciepło
dostarczone z zewnątrz do struktury diody – warstwy zubożonej – generuje
parę elektron-dziura. Przy obecności napięcia Ur polaryzującego diode
zaporowo, elektrony przenikają do warstwy złącza zanim zrekombinują z
dziurą. Powstaje w ten sposób mały prąd mniejszościowy, płynący w
strukturze diody, który nie zależy od wysokości napięcia ale od temperatury
złącza i wraz z nią wzrasta. Wzrost napięcia polaryzującego złącze p-n do
wartości Ubr powoduje lawinowe przebicie złącza. Elektron mniejszościowy
uzyskując energię wskutek obecności napięcia Ur=Ubr dociera do bieguna
dodatniego (anody) diody zderzając się po drodze z atomami oddaje im część
energii i powodując tym samym w uderzonym atomie przejście elektronu
walencyjnego do pasma przewodnictwa. Podobnie dalsze zderzenia
wzrastającej liczby pojawiających się elektronów powoduje geometryczny
wzrost ich liczby w paśmie przewodnictwa co objawia się gwałtownym
wzrostem prądu płynącego w kierunku zaporowym. Większość diod nie
pracuje w tym zakresie napięcia i ulega w tym momencie zniszczeniu.
Multiwibrator.. układ generacyjny, który pozwala uzyskać relaksacyjny
sygnał wyjściowy w przebiegu zbliżonym do prostokątnego. Multiwibratory
można też nazwać przerzutnikami. Układ powstający przy połączeniu
szeregowo dwóch wzmacniaczy i zamknięcia miedzy nimi pętli dodatniego
sprzężenia zwrotnego. Sprzężenie może być dokonane przez zastosowanie
kondensatorów, a więc tylko dla składowej zmienno-prądowej. multiwibrator astabilny. Zastosowanie sprzężenia rezystancyjnego i
pojemnościowego tworzy multiwibrator monostabilny. Sprzężenie obejmuje
składową stałą i zmiennoprądową. Zastosowanie w sprzężeniu zwrotnym
tylko rezystorów – multiwibrator bistabilny (przerzutnik). Jeśli stopień
wzmocnienia >2 – multiwibrator polistabilny.
Wartości rzeczywiste oraz wynik pomiaru. Wartość rzeczywista wielkości,
jest to wartość charakteryzująca wielkość określoną jednoznacznie w
warunkach istniejących w chwili dokonywania pomiaru. Wartość poprawna
wielkości, jest to wartość, którą uważa się za w takim stopniu przybliżoną do
wartość rzeczywistej tej wielkości, że różnica między tymi wartościami jest
nieistotna z punktu widze celu pomiaru. Wartość rzeczywista danej wielkości
nie jest znana z natury rzeczy, ale uznajemy ją za wartość graniczną, którą
można osiągnąć za pomocą dostępnych narzędzi pomiarowych przy
zastosowaniu odpowiedniej taktyki pomiarowej i eliminując pewne błędy.
Biorąc pomyłkę pod uwagę, możemy określić pojęcie błędu pomiaru. Wynik
pomiaru bez określenia błędu poziomu jest bezwartościowy. Składniki błędu
pomiaru: błąd narzędzia pomiarowego, błąd zastosowanej metody
pomiarowej, błąd odczytu wyniku pomiaru, błąd wynikający z obróbki
wyniku pomiaru. Różnica między wartością mierzoną a rzeczywistą:
delta=Wmierz-Wrzecz. Błędy systematyczne – te błędy, gdzie wartość jest
stała podczas pomiaru, przy założeniu, że występują stałe warunki pomiaru.
Błąd wówczas jest systematyczny i daje się obliczyć. Można go
wyeliminować dodając poprawkę. Błąd może wystąpić m.in jeśli obserwator
odczytuje miernik pod niewłaściwym kątem (nieprostopadle), ale zawsze pod
takim samym kątem. Błędy przypadkowe – przyczyny ich powstania są
wyniki, na które nie mamy wpływu, które jednak oddziałują na wynik
pomiaru. Obserwator zna te błędy, jednak nie potrafi ich uwzględnić przy
obliczeniach błędy systematycznego. Na owe błędy składa się: temperatura,
zmiany napięcia zasilającego (pojawienie się zniekształceń sinusoidy), zapad
napięcia, wywołanie wzburzeń oddziałujących na mierniki. One ujawniają się
przy wielokrotności pomiaru tej samej wartości. Można je ocenić za pomocą
rachunku prawdopodobieństwa i również metodą statystyki.
DB-decybel – jednostka miary nieliniowej, logarytmicznej. Wartość
pomiarowa określająca wartość urządzenia toru transmisji danych (toru
sygnałowego). Wartości wyrażane w decybelach odnoszą się do stosunku
dwóch wielkości proporcjonalnych do mocy. Jednostką podstawową jest bel
[B] jednak jednostka okazała się zbyt duża i przyjęło się używać jednostki
pochodnej - 10 razy mniejszej (przedrostek decy).
Mostek pomiarowy RLC: mostek pomiarowy Wheatstone`a – sluży do
pomiaru rezystancji o wartościach średnich od 1/10ohm do 100kohm (nie
stosujemy do pomiarów rzędu mili i mega). Do bardzo małych stosuje się
mostek Thorgsona(?), a do dużych induktor (prądnica prądu przemiennego
napędzana ręką) – stosowana jako źródło napięcia rzędu 1kV-2kV.
Budowa oscyloskopu. Głównym elementem oscyloskopu jest lampa
oscyloskopowa. Na jej ekranie powstaje obraz świetlny obserwowanych
sygnałów lub wielkości. Obraz świetlny widoczny na ekranie oscyloskopu jest
wynikiem bombardowania ruchomą wiązką elektronów warstwy luminoforu
pokrywającej wewnętrzną powierzchnię ekranu. Źródłem wiązki jest działo
elektronowe. Katoda emituje elektrony, które następnie przyspieszane są w
polu elektrycznym kolejnych anod działa elektronowego. Parametry wiązki
takie jak prędkość elektronów w strumieniu i średnica strumienia decydujące
o jakości obserwowanego obrazu można regulować pokrętłami panelu
czołowego opisanymi jako JASNOŚĆ (INTENSITY) i OSTROŚĆ (FOCUS).
Wyemitowana przez działo elektronowe wiązka jest następnie odchylana
zmiennym polem elektrycznym w dwóch układach odchylania: pionowego-Y
(VERTICAL) i poziomego-X (HORIZONTAL). Zmiany pola elektrycznego
w układach odchylania, wymuszone zmianami napięcia przyłożonego do
płytek odchylających, powodują że wiązka elektronów uderza w co raz to inne
punkty ekranu powodując ruch plamki świetlnej obserwowany jako obraz
oscyloskopowy. ZASADA DZIAŁANIA LAMPY OSCYLOSKOPOWEJ
Obwód żarzenia podgrzewa do wysokiej temperatury katodę, która emituje
elektrony. Między katodą i anodą powstaje pole elektryczne, w którym
ujemnie naładowane elektrony emitowane z katody są przyciągane do anody.
Czym większe jest napięcie anody, tym silniej przyciągane są elektrony. Na
drodze między katodą, a anodą elektrony nabierają prędkości, są skupiane w
cienką wiązkę, po czym uderzają w ekran pokryty specjalną substancją zwaną
luminoforem. Elektrony uderzając w luminofor tracą swą energię, a energia ta
zamienia się na światło, zwykle koloru zielonego. Między katodą, a główną
anodą umieszczone są dodatkowe elektrody, między innymi siatka, które
umożliwiają regulację ilości elektronów biegnących do anody. Ewentualne
dodatkowe anody tworzą tak zwane soczewki elektronowe, umożliwiające
takie ukierunkowanie strumienia elektronów, inaczej mówiąc ich
zogniskowanie, że trafiają one w jedno miejsce ekranu, tworząc świecący
punkt (plamkę) o średnicy poniżej 1 milimetra.
K - katoda, G - grzejnik katody, W - siatka, A1, A2, A3 - anody, X - płytki
odchylania poziomego, Y - płytki odchylania pionowego, A4 – elektroda
ekranująca, E- ekran, P - powłoka grafitowa, O - osłona szklana.
Tyrystor jest elementem półprzewodnikowym składającym się z 4 warstw w
układzie p-n-p-n. Jest on wyposażony w 3 elektrody, z których dwie są
przyłączone do warstw skrajnych, a trzecia do jednej z warstw środkowych.
Elektrody przyłączone do warstw skrajnych nazywa się katodą (K) i anodą
(A), a elektroda przyłączona do warstwy środkowej – bramką.
Prostownik jest to element lub zestaw elementów elektronicznych służący do
zamiany napięcia przemiennego na napięcie jednego znaku, które po dalszym
odfiltrowaniu może być zmienione na napięcie stałe. Prostowniki są
stosowane w energetyce, zasilaniu maszyn i urządzeń (np. w elektrowozach),
w galwanotechnice oraz w większości urządzeń elektronicznych zasilanych z
sieci energetycznej lub jakimkolwiek napięciem przemiennym (np. układy
elektryczne samochodów). Prostownikiem jest również detektor diodowy
wykorzystywany do detekcji sygnału radiowego zmodulowanego AM lub FM.
Stabilizator to układ elektroniczny, którego zadaniem jest utrzymywanie na
wyjściu stałego napięcia (stabilizator napięcia) lub prądu (stabilizator prądu)
niezależnie od obciążenia układu i wahań napięcia zasilającego. W praktyce
stabilizatory prądu buduje się w oparciu o stabilizatory napięcia.
Stabilizatory charakteryzują: Współczynnik stabilizacji napięcia (prądu), który
jest wyrażony jako stosunek przyrostu napięcia (prądu) wyjściowego do
przyrostu napięcia (prądu) wejściowego, sprawność energetyczna, która jest
stosunkiem mocy oddawanej do odbiornika do mocy pobieranej ze źródła
zasilania. Zwykle sprawność wyrażana jest w procentach.
Stabilizatory dzielą się na dwie główne grupy: O działaniu ciągłym, tzn.
starające się utrzymać cały czas napięcie wyjściowe na zadanym poziomie.
Charakteryzujące się małą sprawnością energetyczną (ok. 30%). O działaniu
impulsowym, tzn. utrzymujące na wyjściu średnią wartość napięcia
zasilającego na zadanym poziomie. Stabilizatory tego typu charakteryzują się
dobrą sprawnością energetyczną (ponad 90%), ale ich konstrukcja jest
skomplikowana i ponadto ze względu na sposób działania wprowadzają
dodatkowe zakłócenia. Zasilacze ze stabilizatorami impulsowymi są
powszechnie stosowane w domowych komputerach.
Stabilizator napięcia z diodą zenera
Filtry wygładzające są określane inaczej jako filtry dolno-przepustowe
ponieważ przepuszczają niskie częstości redukując składowe o wysokich
częstościach. Służą do redukcji szumów wysokich częstości. W wyniku
działania otrzymujemy rozmycie obrazu i usunięcia plamek. Duże maski
powodując rozmycia obrazów. Optymalne działanie filtru otrzymamy przy
zastosowaniu maski, której współczynniki będą równe 1.
MOS. W technologii MOSFET tranzystory są produkowane w formie trzech
warstw. Dolna warstwa to płytka wycięta z monokryształu krzemu lub krzemu
domieszkowanego germanem. Na płytkę tę napyla się bardzo cienką warstę
krzemionki lub innego tlenku metalu lub półmetalu, która pełni funkcję
izolatora. Warstwa ta musi być ciągła (bez dziur), ale jak najcieńsza. Obecnie
w najbardziej zaawansowanych technologicznie procesorach warstwa ta ma
grubość równą pięciu cząsteczek tlenku. Na warstwę tlenku napyla się z kolei
bardzo cienką warstwę dobrze przewodzącego metalu (np. złota). Układ trzech
warstw tworzy prosty tranzystor lub pojedynczą bramkę logiczną układu
procesora.
Falownik – urządzenie elektryczne zamieniające prąd stały, którym jest
zasilane, na prąd przemienny o regulowanej częstotliwości wyjściowej. Jeśli w
falowniku zastosuje się modulację szerokości impulsów lub modulator PWM
to równocześnie ze zmianą częstotliwości można regulować wartość prądu
wyjściowego i współczynnika mocy.
Falowniki służą głównie do regulacji prędkości obrotowej silników
elektrycznych prądu przemiennego. Oprócz tego falowniki stanowią element
składowy niektórych zasilaczy impulsowych. W niektórych wypadkach
stosowane są do zasilania ekranów LCD w laptopach oraz wzmacniaczy
układów analogowych. W zależności od rodzaju źródła zasilania falownika
wyróżnia się: falowniki napięcia - zasilane ze źródła napięciowego, falowniki
prądu - zasilane ze źródła sterowanego częstotliwości. Falowniki zasilane są
często z sieci prądu przemiennego przez prostownik tyrystorowy lub
warystorowy.