ZESZYTY NAUKOWE POLITECHNIKI RZESZOWSKIEJ 288, Mechanika 85
RUTMech, t. XXX, z. 85 (3/13), lipiec-wrzesień 2013, s. 267-285
Adam JAROSZEWICZ1
PROJEKT KONCEPCYJNY GLOBALNEGO
SYSTEMU NAWIGACYJNEGO DLA MARSA
Współcześnie Mars stał się obiektem bezprecedensowego wyścigu wielu państw
w eksploracji planety, której ukoronowaniem ma się stać lądowanie ludzi na powierzchni Czerwonej Planety. Załogowa wyprawa na Marsa będzie wymagać
stworzenia globalnego systemu nawigacyjnego planety oraz zapewnienia ciągłej,
szerokopasmowej transmisji danych z Ziemią. Współczesna nawigacja sond międzyplanetarnych znajdujących się w dalekiej przestrzeni kosmicznej jest procesem
złożonym, czasochłonnym i kosztownym, wymagającym do pracy złożonej infrastruktury naziemnej. Proces nawigacji jest całkowicie nieautonomiczny, sonda nie
jest w stanie, wykorzystując aparaturę pokładową, określić swojego położenia
przestrzennego w przyjętym układzie odniesienia. W pracy został przedstawiony
projekt koncepcyjny dopplerowskiego globalnego systemu nawigacyjnego dla planety Mars, pozwalającego na określenie położenia obiektu na powierzchni planety
i w bliskiej przestrzeni w czasie nieprzekraczającym 2 h, oraz systemu łączności,
zapewniającego wzajemną łączność pomiędzy sondami / lądownikami i retransmisję danych z powierzchni Marsa na Ziemię.
Słowa kluczowe: Mars, system nawigacyjny, transmisja danych
1. Wprowadzenie
Mars fascynował i kreował wyobraźnię człowieka od tysiącleci. Starożytni
Rzymianie nazwali jego imieniem swego boga wojny, wyobrażając sobie, że
jego rdzawo-czerwone zabarwienie powstało z krwi poległych wojowników2 [1].
Dotychczasowa eksploracja Marsa prowadzona przez człowieka obejmuje 40
prób wysłania sond międzyplanetarnych w kierunku planety, poczynając od
przelotu sondy w pobliżu planety (np. Mariner 4, 6, 7), poprzez wprowadzenie
sondy na orbitę planety (tzw. Orbiter; np. Mars 2, 5, Mariner 9, Mars Odyssey),
1
Autor do korespondencji/corresponding author: Adam Jaroszewicz, Politechnika Wrocławska,
Wybrzeże Wyspiańskiego 27, 50-370 Wrocław, tel.: (71) 3203772, e-mail: [email protected]
2
Odległość Marsa od Ziemi w zależności od wzajemnego położenia planet względem Słońca zawiera
się od 5,576 ·107 km (0,37 AU) – wielka opozycja do 4,013 ·108 km (2,52 AU) – koniunkcja górna, co
odpowiada czasowi „przebiegu” fali elektromagnetycznej na trasie Mars – Ziemia → 186 s (3 min 6 s
– wielka opozycja) i 1337 s (20 min 57 s – koniunkcja górna). 1 AU (j.a.) – jednostka astronomiczna
– średnia odległość Ziemi od Słońca, 1 AU = 1,496 ·107 km.
268
A. Jaroszewicz
lądowanie próbników na powierzchni (np. Mars 3, Viking 1, 2, Phoenix) i na
dostarczeniu autonomicznych ruchomych pojazdów/łazików na powierzchnię
planety kończąc (tzw. Lander/Rover; Sojourner, MER-A Spirit, MER-B Opportunity, MSL Curiosity), umożliwiając prowadzenie prac badawczych nie tylko
w miejscu lądowania, ale także w najbliższej okolicy [1, 2].
W ciągu ostatnich 20 lat nawigacja satelitarna rozwinęła się z nauki „eksperymentalnej” do dojrzałej technologii, która zrewolucjonizowała globalne systemy nawigacji obiektów ruchomych. Obecnie istnieje możliwość realizacji
praktycznie natychmiastowego pozycjonowania i nawigacji oraz łączności dla
użytkowników znajdujących się w dowolnym miejscu globu. Diametralnie inaczej sytuacja przedstawia się w przypadku nawigacji i łączności dla obiektów
znajdujących się w „głębokiej” przestrzeni kosmicznej lub na powierzchniach
innych ciał niebieskich. Nawigacja i łączność z sondami międzyplanetarnymi
znajdującymi się w Układzie Słonecznym są obecnie realizowane za pomocą
sieci Deep Space Network (DSN)3. Najtrudniejsze warunki do łączności kosmicznej występują nie tylko w przypadku dalekich misji kosmicznych w odległe rejony Układu Słonecznego, ale także dla misji bliskich w okolice Wenus,
Merkurego lub Słońca. W pierwszym przypadku występują znaczne ograniczenia mocy sygnałów użytecznych ze względu na odległość, w drugim zaś wpływ
silnych zakłóceń elektromagnetycznych ze strony Słońca [3].
Systemy łączności ze statkami kosmicznymi zapewniają dwukierunkową
transmisję danch, systemy nawigacji pozwalają określić położenie obiektu
w przyjętym układzie współrzędnych [3, 4]. Nawigacja statku kosmicznego
w przestrzeni kosmicznej ma na celu:
• określenie aktualnego położenia i planowanej trajektorii lotu,
• określenie parametrów pracy zespołu napędowego (np. ciąg, czas pracy),
korekcja aktualnej trajektorii lotu (np. wprowadzenie na orbitę wokół
planety – cel podróży).
Systemy nawigacji kosmicznej pozwalają określić m.in. prędkość lotu sondy międzyplanetarnej (w kierunku zgodnym lub przeciwnym do ruchu Ziemi),
odległość od Ziemi, położenie w przyjętym układzie współrzędnych (np. położenie na tle nieba) oraz położenie w odniesieniu do celu misji (np. planety) poprzez wykonanie np. serii zdjęć (Optical Navigation, OpNav) – obserwacja
miejsca docelowego (np. powierzchni planety) celem dokonania np. niezbędnych korekcji trajektorii lotu przed lądowaniem [5]. Prędkość lotu sondy międzyplanetarnej jest określana na podstawie „przesunięcia Dopplera”, odległość
zaś od Ziemi na podstawie czasu „przebiegu” zakodowanego (kod czasowy
3
Deep Space Network (DSN) – nadawczo-odbiorcza globalna sieć dużych anten zarządzana przez Jet
Propulsion Laboratory (USA). DSN pozwala na nawiązanie łączności pomiędzy Ziemią a bezzałogowymi sondami kosmicznymi eksplorującymi Układ Słoneczny za pośrednictwem sieci przekaźników
z antenami o średnicy 34 i 70 m rozmieszczonymi w trzech kompleksach oddalonych od siebie
o ok. 120o – Madryt (Hiszpania), Canberra (Australia) i Goldstone (Kalifornia, USA).
Projekt koncepcyjny globalnego systemu ...
269
– Time code) sygnału transmitowanego z Ziemi i retransmitowanego4 przez nadajnik pokładowy w kierunku powrotnym. Przy znanym opóźnieniu „wnoszonym” przez systemy pokładowe sondy i urządzenia naziemne oraz przy
uwzględnieniu wpływu atmosfery ziemskiej (np. refrakcja jonosferyczna) możliwe jest określenie odległości Ziemia – sonda międzyplanetarna z dokładnością
do pojedynczych metrów. Położenie kątowe w przyjętym układzie odniesienia
oraz prędkość opierając się na przesunięcie Dopplera, są realizowane metodą
opóźnienia grupowego lub metodą VLBI [3, 4, 6].
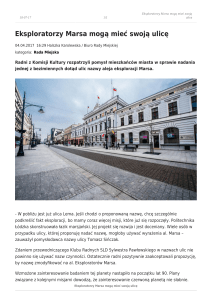
Rys. 1. Metoda VLBI określania odległości za pośrednictwem sieci Deep
Space Network
Fig. 1. The VLBI method of distance determination using Deep Space
Network
Pomiar położenia kątowego sondy międzyplanetarnej metodą VLBI5 polega
na jednoczesnym odbiorze sygnałów transmitowanych przez sondę przez dwa
niezależne odbiorniki DSN umieszczone na powierzchni Ziemi, oddalone od
4
5
Pasmo X – łączność Ziemia – statek kosmiczny f = 7,145÷7,235 GHz, statek kosmiczny – Ziemia
f = 8,400÷8,500 GHz, pasmo S – łączność Ziemia – statek kosmiczny f = 2,025÷2,120 GHz, statek
kosmiczny – Ziemia f = 2,200÷2,300 GHz. Pasmo Ka – łączność Ziemia – statek kosmiczny
f = 34,200÷34,700 GHz, statek kosmiczny – Ziemia f = 31,800÷32,300 GHz. Częstotliwość sygnału
retransmitowanego z pokładu sondy międzyplanetarnej jest „przesunięta” do częstotliwości sygnału
odbieranego w stosunku: pasmo S – 240/221, pasmo X – 880/749, pasmo Ka – 3344/3599.
VLBI (Very – Long – Baseline Interferometry) – interferometria wielkobazowa. Proces ten wymaga
znajomości dokładnego położenia każdej stacji DSN w odniesieniu do lokalizacji osi ziemskiej
– współcześnie błąd ten nie przekracza 3 cm.
270
A. Jaroszewicz
siebie o odległość B (tzw. baza). W procesie detekcji koherentnej odebrane sygnały zostają poddane procesowi korelacji. Do dwóch odbiorników docierają
dwa identyczne sygnały transmitowane przez sondę przesunięte w fazie ze
względu na różnice dróg ρ1 i ρ2. Pomiar przesunięcia fazowego pomiędzy sygnałami (proces korelacji) umożliwia określenie ich wzajemnego opóźnienia τ i kąta
podniesienia anteny θ – ∆DOR6 (rys. 1.).
ρ1 − ρ 2 = B ⋅ sin θ → τ ⋅ c = B ⋅ sin θ → sin θ = τ ⋅ c / B
(1)
Takie rozmieszczenie odbiorników DSN pozwala, na podstawie pomiaru przesunięcia fazowego fali elektromagnetycznej, zmierzyć kąt θ pomiędzy prostą
wyznaczaną przez anteny w zakresie od 0° do 180° a umowną linią łączącą antenę z sondą międzyplanetarną (tzw. linia namiaru). Wykorzystanie metod triangulacji umożliwia określenie położenia przestrzennego sondy międzyplanetarnej, jednakże z powodu „niedokładnego” ustawienia anteny w kierunku sondy
sam pomiar jest obarczony znacznym błędem. Jako obiekty odniesienia (Reference source) służą m.in. kwazary, których pozycje przestrzenne są dokładnie
określone metodami astronomicznymi (odległość kątowa ≤15°). Współcześnie
dokładność określania pozycji w rejonie Układu Słonecznego (VLBI) jest szacowana na ok. 5 nrad (750 m na odległości 1 AU) [7, 8].
2. Nawigacja i łączność z Marsem – stan obecny
Współcześnie nawigacja i łączność z sondami krążącymi wokół Marsa
i łazikami poruszającymi się po jego powierzchni jest realizowana za pomocą
sieci DSN. Wzajemna odległość Ziemi i Marsa zmienia się prawie 7-krotnie
w zależności od wzajemnego położenia planet, co ma znaczący wpływ na jakość
transmisji. Przy odległościach powyżej 2,45 AU (planety po przeciwnych stronach Słońca) zakłócenia wnoszone przez gwiazdę praktycznie uniemożliwiają
realizację łączności radiowej Mars – Ziemia [2]. Szybkość bezpośredniej transmisji danych na trasie Mars – Ziemia z pokładów łazików marsjańskich zależy
m.in. od mocy pokładowych źródeł energii elektrycznej. Ograniczona pojemność lądownika determinuje rozmiary samego łazika, a także rozmiary i moc
pokładowych źródeł energii elektrycznej. Problem deficytu mocy elektrycznej
w znacznie mniejszym stopniu występuje w przypadku orbiterów – sztucznych
satelitów Marsa krążących po orbicie wokółmarsjańskiej. Dwa „aktywne”
sztuczne satelity Marsa: Mars Odyssey i Mars Reconnaissance Orbiter są zasilane za pośrednictwem paneli ogniw fotoelektrycznych: Mars Odyssey
– Pzasil max = 750 W, Mars Reconnaissance Orbiter – Pzasil max = 2000 W. Pozwala
to na zwiększenie mocy nadajników pokładowych, co jest równoznaczne ze
6
∆DOR – Delta Differential One-way Range – różnicowa metoda pomiaru odległości poprzez jednokierunkową emisję fali elektromagnetycznej, np. sonda międzyplanetarna – Ziemia.
Projekt koncepcyjny globalnego systemu ...
271
wzrostem szybkości transmisji danych: Mars Reconnaissance Orbiter – PNAD =
= 100 W (X), 35 W (Ka); szybkość transmisji z Ziemią 0,5÷3,5 Mb/s, Mars
Odyssey – PNAD = 15 W (X); szybkość transmisji z Ziemią 128÷256 kb/s. Dodatkowo sztuczne satelity Marsa uczestniczą w retransmisji danych z/na pokład
łazików marsjańskich, co pozwala na ograniczenie mocy nadajników pokładowych łazików (ograniczenie zużycia energii elektrycznej) i wzrost szybkości
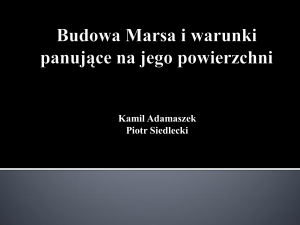
transmisji7. Wysokość orbity sztucznych satelitów Marsa, np. Mars Reconnaissance Orbiter – h = 250÷316 km, umożliwia transmisję danych na Ziemię przez
czas 10÷11 h/SOL (rys. 2.) [2, 9].
Rys. 2. System transmisji danych z pokładów sond i łazików
marsjańskich
Fig. 2. The data transmission system from deck of Mars probes and
exploration rovers
3. Nawigacja i łączność z Marsa – przyszłość
Współczesna nawigacja sond międzyplanetarnych znajdujących się w dalekiej przestrzeni kosmicznej jest procesem złożonym, czasochłonnym i kosztownym, wymagającym do pracy rozbudowanej infrastruktury naziemnej. Sam proces nawigacji jest całkowicie nieautonomiczny; sonda nie jest w stanie, wykorzystując aparaturę pokładową, określić swojego położenia przestrzennego
w przyjętym układzie odniesienia. DSN zapewnia doskonałe możliwości nawigacyjne. Jednak pozwala na jednoczesne prowadzenie nawigacji tylko czterech
7
Podczas 9 min z pokładu łazika, np. MSL – Curiosity do Mars Recoinaissance Orbiter MRO (Mars
Odyssey Orbiter) zostanie przesłanych maksymalnie 8÷9 MB danych; identyczna liczba danych
będzie przesyłana bezpośrednio z łazika na Ziemię od 1,5 do 5 h.
272
A. Jaroszewicz
obiektów znajdujących się na powierzchni Marsa; możliwości te są ograniczone
przez prędkość rozchodzenia się fal elektromagnetycznych. Czas ten staje się
kluczowym zagadnieniem, gdy np. lądownik sondy „wchodzi” w końcową fazę
lądowania, np. na powierzchni Marsa. W pewnym momencie czas trwania procedury lądowania będzie krótszy, niż czas potrzebny do przesłania przez DSN
na pokład lądownika (lądownik – Ziemia DSN – lądownik) niezbędnych korekt
nawigacyjnych, co może mieć decydujący wpływ na powodzenie misji. Dla
zdalnej nawigacji sond międzyplanetarnych prowadzonych przez DSN z powierzchni Ziemi praktycznie niemożliwy staje się dokładny rozdział systemów
pokładowych sond na systemy nawigacji i systemy łączności (transmisji danych). Przykładowo, nawigacja optyczna OpNav jest prowadzona podczas podejścia do lądowania (np. zdjęcia powierzchni Marsa), zdjęcia są przesyłane
przez system łączności DSN (transmisja danych) do stacji naziemnych, gdzie
jest prowadzona procedura określenia położenia sondy względem trajektorii
lądowania (nawigacja), następnie zaś sygnały korekcyjne przez system łączności
(transmisja danych) są przesyłane do systemów pokładowych sondy odpowiedzialnych za orientację w przestrzeni.
Współcześnie funkcjonujące ziemskie systemy nawigacji satelitarnej (GPS,
GLONASS, BEIDOU) są także systemami nawigacji i transmisji danych, przy
czym dla szerokiego spektrum użytkowników jest udostępniona jedynie funkcja
nawigacji. Poszczególne satelity wymienionych systemów tworzą rozbudowaną
sieć transmisji danych na trasie: Ziemia – satelita nawigacyjny – Ziemia, a także
pomiędzy satelitami systemu nawigacyjnego. Uaktualnienie danych nawigacyjnych retransmitowanych z pokładów satelitów nawigacyjnych do użytkowników
jest realizowane przez system łączności (transmisja danych) pomiędzy satelitami
i stacjami naziemnymi. Już system Transit umożliwiał (oprócz nawigacji) retransmisję informacji pomiędzy uprzywilejowanymi użytkownikami systemu
(US Navy). Przyszłościowy europejski system nawigacji satelitarnej Galileo
będzie oferował, oprócz trybu nawigacji, także tryb łączności i transmisji danych
– serwis poszukiwania i ratowania SAR (Search and Rescue Service). Satelitarny system nawigacyjny, jakim bez wątpienia jest np. system GPS, jest de facto
systemem transmisji danych. Określanie pozycji użytkownika systemu jest realizowane w odbiorniku nawigacyjnym, zabudowanym np. w telefonie GSM trzymanym w ręce przez użytkownika, na podstawie danych nawigacyjnych opracowanych w stacji segmentu naziemnego (główna stacja nadzoru – baza sił lotniczych Shriever AFB w Colorado Springs, USA), retransmitowanych przez sieć
sztucznych satelitów systemu GPS w skali całego globu. Obecnie w różnych
miejscach Układu Słonecznego znajduje się 9 „czynnych” obiektów8, z którymi
jest utrzymywana łączność i prowadzona nawigacja za pośrednictwem sieci
8
Voyager 1, Voyager 2, Cassini Huygens, New Horizons, Mars Express, Mars Odyssey Orbiter, Mars
Reconnaissance Orbiter, MER Opportunity, MSL – Curiosity.
Projekt koncepcyjny globalnego systemu ...
273
DSN9. Znaczny wzrost liczby i różnorodności misji badawczych, „bogactwo”
instrumentów pokładowych i informacji gromadzonych w pamięciach lądowników / łazików, spowoduje zwiększenie liczby danych i wymusi konieczność
wzrostu szybkości transmisji pomiędzy próbnikami operującymi zarówno
w rejonie Marsa, jak i z Ziemią. Załogowa wyprawa na Marsa postawi przed
projektantami całkowicie nowe wyzwania dotyczące transmisji danych z głębokiej przestrzeni kosmicznej, tj. zapewnienie ciągłej, szerokopasmowej transmisji
danych o przepustowości co najmniej 50÷100 Mb/s.
Reasumując, proces stałej eksploracji Marsa, którego ukoronowaniem ma
być załogowa wyprawa na Marsa, będzie wymagać budowy w pełni autonomicznego i niezawodnego systemu nawigacji i łączności (transmisji danych)
w skali całej planety. Marsjański system nawigacji i łączności powinien zapewnić m.in. [10]:
• możliwość określenia pozycji (informacje nawigacyjne) użytkownika
z wymaganą dokładnością w skali całego globu10 na powierzchni planety
i w bliskiej przestrzeni kosmicznej (np. wspomaganie nawigacyjne
w krytycznych fazach lotu, lądowanie na powierzchni planety),
• retransmisję danych z pokładów lądowników / łazików na Ziemię
– wzrost prędkości transmisji (łącze laserowe) – ograniczenie mocy / zużycia energii przez lądowniki / łaziki marsjańskie,
• retransmisję danych pomiędzy np. lądownikami, łazikami, balonami, samolotami w skali całej planety (np. badania geologiczne, meteorologiczne),
• globalne wsparcie w zakresie łączności i transmisji danych dla wielu
użytkowników (np. członkowie załóg),
• minimalizację zmienności pokrycia powierzchni planety i błędów określania pozycji użytkowników z powodu długoterminowych perturbacji
orbit satelitów systemu,
• maksymalną efektywność dla danej konstelacji satelitów oraz sprawność
systemu w przypadku np. „utraty” jednego z satelitów nawigacyjnych.
W wyborze optymalnego, satelitarnego systemu nawigacyjnego dla Marsa
należy kierować się m.in.:
• zasięgiem i niezawodnością funkcjonowania systemu,
• dokładnością i szybkością określania pozycji użytkowników,
• dostępnością i liczbą użytkowników,
9
10
Maksymalna prędkość transmisji danych na trasie orbita marsańska – Ziemia nie przekracza 3,5 Mb/s
przy ograniczeniach czasowych do ok. 11 h / SOL, wynikających z ruchu obrotowego planety. Przy
tej prędkości „przesłanie” jednego zdjęcia powierzchni Marsa w wysokiej rozdzielczości na Ziemię
zajmuje ok. 90 min, co pozwala na przesłanie ok. 7 zdjęć / SOL.
Dotychczasowa eksploracja Marsa prowadzona za pośrednictwem lądowników i łazików była skupiona głównie na równikowym pasie powierzchni planety zawartej pomiędzy zwrotnikami (dla Marsa
– 24,936°N÷24,936°S).
274
A. Jaroszewicz
• autonomicznością i możliwością „zdalnej” konfiguracji elementów sys-
temu,
• liczbą satelitów i stacji monitorujących systemu nawigacyjnego.
Szacuje się, że w czasie pierwszego etapu eksploracji Marsa liczba użytkowników systemu nawigacyjnego nie przekroczy kilkunastu, kilkudziesięciu odbiorców.
Kolejnym celem jest wybór metody określania powierzchni pozycyjnych11,
która ma bezpośredni wpływ na organizację systemu nawigacyjnego, a pośredni
na jego autonomiczność. „Ziemskie” satelitarne systemy nawigacyjne, wykorzystujące głównie metodę odległościową (GPS, GLONASS, GALILEO)12, umożliwiają określenie położenia w dowolnym punkcie globu w czasie nieprzekraczającym kilku minut z dokładnością kilku metrów. Dokładność i szybkość określania pozycji jest jednak odkupiona rozbudowaną strukturą kosmiczną i naziemną systemów (GPS – 24 satelity, 12 stacji naziemnych, GLONASS – 24
satelity, 6 stacji naziemnych, GALILEO – 27 satelitów, 5 stacji naziemnych).
Marsjański system nawigacyjny ma być systemem „bezobsługowym”, w pełni
autonomicznym, którego dane nawigacyjne retransmitowane do użytkowników
są opracowywane nie na powierzchni Marsa, lecz na Ziemi i retransmitowane do
satelitów systemu poprzez sieć DSN. Dlatego też w pierwszym etapie eksploracji Marsa13 dokładność i szybkość określania pozycji na powierzchni Marsa
wydaje się być celem drugorzędnym14 na rzecz zasięgu i niezawodności satelitarnego systemu nawigacyjnego. Dokonując analizy „ziemskich” systemów
nawigacji satelitarnej pod kątem minimalnej liczby satelitów niezbędnych do
określenia pozycji użytkownika, autonomiczności systemu i liczby stacji naziemnych „obsługujących” dany system nawigacyjny, najbardziej korzystnym
rozwiązaniem w pierwszym etapie eksploracji Marsa wydaje się być dopplerowski system nawigacji satelitarnej15.
11
12
13
14
15
Powierzchnia pozycyjna – miejsca geometryczne punktów w przestrzeni odpowiadające stałej wartości mierzonego parametru (np. kąta, odległości) – dla metody odległościowej powierzchnia kuli,
w środku której znajduje się sztuczny satelita. Współcześnie w radionawigacji jest znanych pięć
metod określania powierzchni pozycyjnych (kątowa, odległościowa, różnic odległości, pomiaru
prędkości radialnej satelity, dopplerowska), jednak tylko dwie odczekały się praktycznego zastosowania: metoda dopplerowska (TRANSIT) i metoda odległościowa (np. GPS, GLONASS, GALILEO).
Określenie położenia użytkownika (punkt przecięcia się powierzchni pozycyjnych) przez pomiar
odległości pomiędzy kilkoma satelitami systemu nawigacyjnego (efemerydy satelitów (współrzędne)
w informacji nawigacyjnej) a obserwatorem.
Misje marsjańskie do chwili lądowania ludzi na powierzchni planety bez budowy stałej bazy załogowej na powierzchni.
Dokładność określania pozycji rzędu 1-2 km w czasie 60-120 min wydaje się do zaakceptowania na
bezdrożach Marsa.
Jedynym istniejącym systemem nawigacji satelitarnej wykorzystującym zjawisko Dopplera był
„nieczynny już” system TRANSIT opracowany na początku lat 60. XX w. przez USA na potrzeby
amerykańskiej flotylli łodzi podwodnych Polaris. W 1968 roku system został oddany do użytku
cywilnego pod nazwą NNSS (Naval Navigation Satellite System). System tworzyło 6 (7 od 1988 r.)
satelitów nawigacyjnych, rozmieszczonych na sześciu orbitach kołowych, biegunowych (h = 1100
Projekt koncepcyjny globalnego systemu ...
275
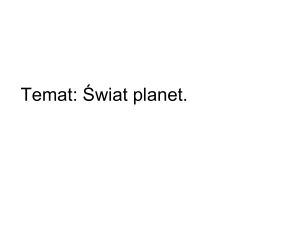
Systemy dopplerowskie opierają się na pomiarze szybkości zmiany odległości od użytkownika do nadajnika, którą określa częstotliwość Dopplera dla
sygnału emitowanego z pokładu satelity [11]. Wielkość dopplerowskiego przesunięcia częstotliwości dla danego miejsca jest wprost proporcjonalna do prędkości ruchu względnego satelity υs i użytkownika. Przecięcie się powierzchni
stożkowej (powierzchni pozycyjnej) odpowiadającej stałej wartości dopplerowskiego przesunięcia częstotliwości z powierzchnią planety (np. Marsa) wyznacza
linię pozycyjną, zwaną izodoppą (rys. 3.). Prędkość υd oblicza się na podstawie
dopplerowskiego przesunięcia częstotliwości sygnału odbieranego z satelity.
Określenie pozycji użytkownika jest analogiczne do metody wykorzystanej
w hiperbolicznych systemach nawigacyjnych, w których tzw. baza (odległość
pomiędzy stacjami bazowymi systemu – nadajnikami radiowymi) jest równa
odległości „pokonywanej” przez jednego satelitę w wybranym przedziale czasu,
S1÷Sn (tzw. punkty bazowe, np. satelity systemu Transit pokonywały w ciągu 1 s
odległość ok. 44 km). Położenie użytkownika na powierzchni Ziemi określa się
poprzez odniesienie go do „znanej” orbity satelity nawigacyjnego (efemerydy
satelity). W celu określenia pozycji użytkownika w układzie współrzędnych
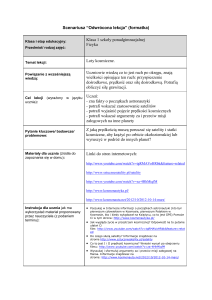
geograficznych należy określić miejsce, w którym dopplerowska zmiana częstotliwości zmienia znak, czyli przechodzi przez zero (rys. 4.). W wyniku względnego ruchu satelity nawigacyjnego i użytkownika otrzymuje się tzw. krzywe
zmian częstotliwości dopplerowskiej, których kształt zależy od odległości użytkownika od płaszczyzny orbity satelity. W pobliżu punktu kulminacji występują
coraz szybsze zmiany częstotliwości odbieranej, które w granicznym przypadku
będą występować nieskończenie szybko w granicach od fN + fD do fN – fD (satelita znajduje się dokładnie nad lub najbliżej odbiornika).
Rys. 3. Linie i powierzchnie pozycyjne w dopplerowskim systemie nawigacji satelitarnej: linia A-B – izodoppa
(położenie użytkownika systemu),
S – punkt bazowy
Fig. 3. Position lines and surfaces in
Doppler satellite navigation system:
A-B line – isodoppa (position of system user), S – base point
km) przesuniętych względem siebie o 30°, nadających w sposób ciągły sygnały zawierające dokładny
aktualny czas oraz parametry swojej orbity (efenerydy). System był obsługiwany przez pięć stacji naziemnych. Informacja nawigacyjna odebrana z jednego satelity w kilku następujących po sobie odstępach czasu umożliwiała określenie pozycji odbiornika z dokładnością do 0,1 mili morskiej w skali
całego globu.
276
A. Jaroszewicz
Rys. 4. Zmiany częstotliwości sygnałów odbieranych z satelity – efekt
Dopplera: S1÷S5 – kolejne położenia
satelity, A, B, C – odległości odbiornika od satelity (A największa, C – najmniejsza)
Fig. 4. Variation of frequency of signals emitted by satellite – Doppler
effect, S1÷S5 – following satellite
positions, A, B, C – the distance between the receiver and satellite
(A – the largest, C – the smallest)
System Transit wykorzystywał sześć satelitów nawigacyjnych rozmieszczonych na sześciu kołowych orbitach biegunowych16, poruszających się na
wysokości ok. h = 1100 km. Satelity nawigacyjne systemu Transit okrążały
Ziemię w czasie ok. 108 min (13,5 razy/24 h). Ze względu na rozmieszczenie
orbit satelitów każdy odbiornik nawiązywał jednoczesną łączność przeważnie
tylko z jednym satelitą systemu. Poprawka położenia mogła być wyznaczona
dopiero po tym, jak kolejny satelita znalazł się nad horyzontem podczas wykonywania kolejnego okrążenia i odbiornik ponownie nawiązał łączność z tym
satelitą. Na średnich szerokościach geograficznych wymagało to jedno- lub
dwugodzinnego oczekiwania na pojawienie się następnego satelity i wyznaczenie kolejnej pozycji, a w okolicach równika – kilkugodzinnego oczekiwania.
Transit nie był w stanie realizować dynamicznego (w czasie rzeczywistym)
określenia pozycji odbiornika użytkownika [6, 12, 13].
Główną zaletą dopplerowskiego systemu nawigacyjnego jest możliwość
określenia pozycji użytkownika z wykorzystaniem sygnałów tylko z jednego
satelity (systemy odległościowe np. GPS wymagają w przypadku nawigacji 2D
– minimum trzech satelit, 3D – minimum czterech satelit), wadą zaś długi czas
i niska dokładność wyznaczania pozycji. Odnosząc parametry systemu Transit
16
Orbita, której płaszczyzna pokrywa się z płaszczyzną południka lokalnego. Satelita poruszający się
po orbicie biegunowej przelatuje co pewien czas nad dwoma biegunami ciała centralnego. Orbita
taka, w zależności od jej promienia, przecina płaszczyznę równika przy każdym obiegu w innym
miejscu (Mars), przy każdym obiegu satelity obraca się o stały kąt. Umożliwia to obserwację całej
powierzchni planety.
Projekt koncepcyjny globalnego systemu ...
277
do warunków marsjańskich, zakładając 12 okrążeń planety w ciągu trwania doby
marsjańskiej – SOL, czas jednego okrążenia planety TSM i wysokość orbity satelitów hS są równe:
TSM
T ⋅ µM
= SOL /12 → 7398 s, hS = 3 SM
2π
2
− RM → hS = 509 km (2)
gdzie: µ – parametr grawitacyjny Marsa, µ = GMM → µ = 4,275·1013 m3/s2, przy
czym G – stała grawitacji, G = 6,673·10–11 N·m2/kg2, MM – masa
Marsa, MM = 6,4185 ⋅1023 kg,
RM – średni promień Marsa, RM = 3,389·106 m.
Na konfigurację satelitarnego systemu nawigacyjnego (liczba płaszczyzn
orbitalnych i satelitów krążących) ma wpływ także na tzw. widzialność satelity
nad horyzontem lokalnym17. „Przeloty” satelitów, dla których kąty elewacji
(wysokość satelity nad horyzontem) w punkcie kulminacji są mniejsze niż 5° lub
większe niż 80°, nie są wykorzystywane do celów nawigacyjnych. Kąt η określający strefę widzialności satelity:
η = arccos
RM
→ η = 29,6o → 2η = 59, 2o ⇒ r = 1757,7 km
RM + hS
(3)
Obszar łączności z satelitą Marsa znajdującego się na orbicie kołowej
o wysokości hS = 509 km w najkorzystniejszym układzie geometrycznym (użytkownik znajduje się w płaszczyźnie orbity satelity) jest równy 2η = 59,2°;
obejmie powierzchnię Marsa ograniczoną okręgiem o promieniu r = 1757,7 km
(rys. 5.).
Rys. 5. Strefa widzialności η satelity S przez obserwatora O: SM – środek Marsa, RM – promień Marsa,
hS – wysokość satelity nad powierzchnią Marsa
Fig. 5. Visibility zone η of S satellite by observer O:
SM – Mars centre, RM – Mars radius, hS – height of the
satellite over the Mars surface
17
Widzialność satelity jest, pomijając ujemny wpływ refrakcji troposferycznej (załamania wiązki promieniowania elektromagnetycznego), równoważna z możliwością nawiązania przez użytkownika
łączności z satelitą – obszar łączności z satelitą.
278
A. Jaroszewicz
Minimalna liczba satelitów nawigacyjnych K dla założonego czasu oczekiwania ∆tS = 120 min na „przelot” satelity i określenie pozycji użytkownika jest
równa [6]:
K=
π ( 180o ) ⋅ TSM
180o ⋅123,3 min ( 7398s )
→
→ 3,12 → 4
∆tS ⋅ 2η
120 min ⋅ 59,2 o
(4)
Minimalna liczba satelitów jest równa 4; zwiększenie tej liczby przy ustalonych
parametrach orbity skróci czas oczekiwania ∆tS. Projektowany system nawigacyjny Marsa tworzy 6 satelitów poruszających się na średniej wysokości
hSM = 509 km (3898 km od środka planety) na 6 kołowych, biegunowych orbitach, których płaszczyzny są przesunięte co 30° długości geograficznej, tzw.
długości areograficznej węzła wstępującego18 (względem równika Marsa19).
Opierając się na równaniu (4), otrzyma się średni czas oczekiwania ∆tS dla 6
satelitów: ∆tS = 62,5 min. Dodatkowe przesunięcie satelitów na sąsiednich orbitach w płaszczyźnie południkowej o kąt 30° (np. satelita 1. – 90°S, 0°E, satelita 2. – 60°S, 30°E, satelita 3. – 30°S, 60°E, satelita 4. – 0°N, 90°E, satelita 5. – 30°N, 120°E, satelita 6. – 60°N, 150°E (współrzędne określają rzut pozycji satelity na powierzchnię Marsa)) skróci czas oczekiwania i zapewni optimum
widzialności, długości obserwacji i dokładności wskazań (rys. 6.).
Satelita nawigacyjny
Rys. 6. Przykładowy rzut trajektorii satelitów nawigacyjnych na powierzchnię
Marsa
Fig. 6. The example of the projection of navigation satellite trajectory on Mars
surface
18
19
Punkt, w którym projekcja orbity sztucznego satelity na sferę niebieską przecina się z równikiem
niebieskim; satelita poruszający się po orbicie z południa na północ przecina płaszczyznę równika
niebieskiego i „przechodzi” na północną półkulę niebieską (dodatnia deklinacja satelity).
Długość równika Marsa: lRM = 21 378 km.
Projekt koncepcyjny globalnego systemu ...
279
Każdy satelita powinien obejmować swoim zasięgiem pas powierzchni
Marsa o szerokości równoleżnikowej 30°, co przy teoretycznej strefie widzialności 2η = 59,2° umożliwi użytkownikowi znajdującemu się w strefie równikowej nawiązanie łączności z dowolnym satelitą systemu w czasie do 60 min.
Utrata jednego satelity systemu, nie wpłynie znacząco na dokładność, może
jedynie wydłużyć się czas określania pozycji. Wpływ na dokładność określania
pozycji użytkownika ma także stabilność częstotliwości sygnału emitowanego
z satelitów. Stabilizacja częstotliwości z dokładnością 10–10 s spowoduje, że dla
częstotliwości nośnej nadajnika satelity fN = 100 MHz niedokładność dopplerowskiej zmiany częstotliwości fD = 1 Hz daje błąd położenia rzędu ok. 1 min
kątowej (dla Marsa 0,989 km). Wpływ refrakcji jonosferycznej na wynik pomiaru może być kompensowany zastosowaniem dwóch częstotliwości nośnych fN1
i fN2 (wystarczających na małych i średnich szerokościach geograficznych).
System nawigacyjny Marsa musi być systemem w pełni autonomicznym;
nie jest możliwa częsta korekcja położenia satelitów na orbitach, jak ma to miejsce w przypadku systemów ziemskich, lub korekcja oprogramowania nawigacyjnego transmitowanego do użytkowników. Autonomiczność tę zwiększa możliwość umieszczenia wszystkich satelitów systemu na orbitach tworzących tzw.
konstelację Walkera (jednorodna i spójna fazowo konstelacja satelitów na identycznych orbitach biegunowych), w której wszystkie zakłócenia ruchu satelitów,
np. grawitacyjne, wpływają w równym stopniu na wszystkie satelity systemu.
Umożliwia to zachowanie geometrii orbit satelitów bez nadmiernej ingerencji ze
strony stacji kontroli (zużycie paliwa → silniki korekcyjne). Konstelacja satelitów systemu nawigacyjnego Marsa tworzy konstelację Walkera 90:6/6/120. Proces budowy w pełni funkcjonalnego systemu nawigacji satelitarnej Marsa będzie
przedsięwzięciem wieloletnim, wieloetapowym [11, 14, 15]:
• etap 1. – lądowanie na powierzchni Marsa kilku bezzałogowych lądowników stanowiących stacje kontroli i sterowania systemem nawigacyjnym, lokalizacja położenia poszczególnych lądowników w marsjańskim
układzie współrzędnych (za pośrednictwem orbiterów krążących po orbitach Marsa/DSN)21 (tab. 1.),
• etap 2. – wystrzelenie na biegunowe orbity Marsa konstelacji satelitów
nawigacyjnych, „wstępne” trajektorie orbit określone za pośrednictwem
orbiterów Marsa/DSN,
• etap 3. – ustalenie „dokładnych” trajektorii satelitów nawigacyjnych
(efemerydy) z poziomu lądowników, np. poprzez wykorzystanie dalmie20
21
90 – kąt inklinacji – i, 6 – liczba satelitów systemu, 6 – liczba płaszczyzn orbitalnych (równomiernie
rozmieszczonych), l – względna odległość pomiędzy sąsiednimi orbitami.
Lądowniki / główne stacje kontroli i sterowania pracą systemu nawigacyjnego wyposażone w wysokostabilne wzorce czasu, zasilane np. przez generatory RTG (niezależność zasilania od warunków
zewnętrznych (poziom oświetlenia)) → MSL Curiosity. W pierwszej fazie budowy systemu nawigacyjnego możliwe wykorzystanie istniejących lądowników marsjańskich jako pomocniczych stacji
kontroli (tab. 1.).
280
A. Jaroszewicz
rzy laserowych (lądowniki); lustra zabudowane na pokładach satelitów
nawigacyjnych,
• etap 4. pełna funkcjonalność systemu – lądowniki stanowią stacje kontroli i sterowania pracą systemu nawigacyjnego; okresowa korekcja błędów
nawigacyjnych (np. perturbacje orbit satelitów nawigacyjnych) poprzez
„korekcję” oprogramowania nawigacyjnego transmitowanego do użytkowników.
System łączności dla Marsa ma za zadanie zapewnienie pełnego i ciągłego
pokrycia powierzchni planety i bliskiej przestrzeni kosmicznej siecią bezprzewodowej łączności radiowej w celu wsparcia logistycznego przyszłych załogowych i bezzałogowych misji marsjańskich [7]. System łączności powinien zapewnić utrzymanie ciągłej dwukierunkowej łączności z wymaganą szybkością
transmisji danych na dystansie:
• Ziemia (DSN) ↔ lądownik / łazik / misje załogowe → połączenie użytkowników końcowych na Ziemi i na Marsie,
• Ziemia (DSN) ↔ Mars – satelity systemu nawigacji i łaczności → obsługa / konserwacja, np. upgrade oprogramowania przez „kontrolerów”
z Ziemi,
• lądownik / łazik / misje załogowe ↔ lądownik / łazik / misje załogowe
→ wymiana informacji pomiędzy poszczególnymi zespołami badawczymi, np. badania sejsmograficzne w skali całej planety,
• Mars – satelity systemu nawigacji i łaczności ↔ Mars Orbiter (np. satelita areostacjonarny) – transmisja danych w kierunku Ziemi przez satelitę
areostacjonarnego – wzrost szybkości transmisji i czasu „łączności”
z Ziemią,
• Mars – satelity systemu nawigacji i łączności ↔ Mars – satelity systemu
nawigacji i łączności → powiązania krzyżowe pomiędzy satelitami,
przydatne dla różnych trybów funkcjonowania sieci, np. transfer danych,
przekierowywanie transmisji danych, upgrade efemeryd, synchronizacja
czasu systemu, badania atmosfery,
• Mars – satelity systemu nawigacji i łaczności ↔ sondy międzyplanetarne
/ misje załogowe na trajektorii lądowania na Marsie / „odlot” w kierunku
Ziemi, np. dokładna nawigacja podczas lądowania precyzyjnego.
Szybkość bezprzewodowej transmisji danych jest proporcjonalna m.in. do
częstotliwości nośnej, mocy nadajnika i rozmiarów anteny nadawczej. Współcześnie łączność międzyplanetarna jest realizowana w paśmie X (8 GHz), przyszłościowe pasmo Ka (32 GHz) umożliwi 2-, 3-krotny wzrost szybkość transmisji danych (<5 Mb/s), co wydaje się być jednak niewystarczające przy wymaganej dwukierunkowej transmisji danych dla załogowej misji na Marsa
(100 Mb/s).
Projekt koncepcyjny globalnego systemu ...
281
Tabela. 1. Przykładowa lokalizacja stacji kontroli systemu nawigacyjnego Marsa
Table 1. The exemplary location of control station of marc navigational system
Stacja kontroli
22
NetLander 1
NetLander 2
NetLander 3
NetLander 4
MER Spirit
MER Opportuity
Mars Polar Lander
Phoenix Mars Lander
Szerokość areograficzna (°)
Długość areograficzna (°)
27,0 N
12,5 S
35,0 N
32,5 S
14,57 S
1,95 S
76,0 S
67,5 N
130,0 W
160,0 W
70,0 W
85,0 E
175,5 E
5,5 W
175,0 E
120,0 W
Rys. 7. Satelitarny system nawigacji i łaczności (transmisji danych) dla
Marsa23
Fig. 7. Satellite system of navigation and communication (data
transmission) for Mars
Wzrost częstotliwości transmisji danych napotyka barierę technologiczną,
wzrost rozmiarów sondy międzyplanetarnej (antena, źródła zasilania) – barierę
22
23
NetLander – „misja zawieszona” (planowana w 2009 r.), wspólna misja CNES (Francuska Agencja
Kosmiczna) i ESA (Europejska Agencja Kosmiczna), wysłania na Marsa orbitera i czterech lądowników – lądowanie w czterech różnych miejscach na Marsie.
Satelita aerostacjonarny – sztuczny satelita Marsa znajdujący się na orbicie aerostacjonarnej – odpowiednik ziemskiej orbity geostacjonarnej dla Marsa „Areo” od imienia greckiego boga wojny
Aresa (rzymski odpowiednik to Mars); wysokość orbity aerostacjonarnej H = 17033 km nad
równikiem Marsa.
282
A. Jaroszewicz
„pojemności” rakiet nośnych (tab. 2.). Jedynym wyjściem wydaje się być wykorzystanie transmisji optycznej – jednokierunkowego (Mars – Ziemia) łącza laserowego, co spowoduje wzrost częstotliwości pracy (≈300 GHz) przy jednoczesnym wzroście szybkości transmisji danych (≤100 Mb/s). Konieczność zapewnienia stałej (bez przerw) łączności z Ziemią wymaga lokalizacji sondy międzyplanetarnej w przestrzeni wokółmarsjańskiej, zapewniającej ciągły kontakt
optyczny z Ziemią [8]. Satelity systemu nawigacyjnego krążące na teoretycznej
wysokości hSM = 509 km znajdują się w cieniu Marsa przez ok. 33% (40,3 min)
czasu obiegu planety; przerwa w łączności z Ziemią, system łączności (transmisji danych) dla Marsa powinien składać się z (rys. 7.):
• satelit niskoorbitalnych (hS = 509 km) – satelity nawigacyjne zapewniające dodatkowo możliwość transmisji danych w skali całej planety,
• satelit wysokoorbitalnych – satelity komunikacyjne „pośredniczące”
w łączności pomiędzy satelitami niskoorbitalnymi a Ziemią.
Satelity komunikacyjne (wysokoorbitalne) powinny znajdować się w przestrzeni wokółmarsjańskiej zapewniającej ciągły kontakt optyczny z Ziemią, co
jest możliwe dla:
• dwóch satelitów komunikacyjnych znajdujących się w dwóch punktach
Lagrange’a24; położenie takie zapewnia ok. 99,8% „widzialności” powierzchni Marsa przez satelity, jednakże znaczna odległość punktów od
powierzchni planety (ok. 1 mln km) „pogarsza” warunki łączności Mars
↔ satelita komunikacyjny; zasadniczym problemem jest stabilizacja położenia satelitów w punktach Lagrange’a L1 – L2; łączność radiowa / laserowa z Ziemią,
• trzech satelitów komunikacyjnych rozmieszczonych co 120° na orbicie
areostacjonatnej (hASO = 17033 km), zapewniających „widzialność” prawie 100% powierzchni Marsa (ograniczona widzialność rejonów wokółbiegunowych).
Dla sztucznego satelity krążącego po kołowej orbicie areostacjonarnej ASO
(TASO = 24 h 39 m 35,244 s) czas przelotu satelity w strefie cienia Marsa
T = 4726,2 s (1 h 18 min 46,2 s): 94,7% – strefa oświetlona, 5,3% – strefa cienia
(okres równonocy wiosennej / jesiennej). Zastosowanie trzech satelitów rozmieszczonych symetrycznie na orbicie areostacjonarnej pozwala na realizację
„ciągłej” łączności Mars – Ziemia – Mars (rys. 8.) [16]. Podczas laserowej
transmisji jednokierunkowej Mars – Ziemia zastosowanie trzech zespołów odbiorczych na ziemskiej orbicie geostacjonarnej (co 120°) zapewni ciągłość
transmisji przy ograniczeniu tłumienia wiązki laserowej w atmosferze Ziemi.
Szacuje się, że dla zapewnienia ciągłości połączenia (brak „zrywania” wiązki
24
Punkt libracyjny (punkt libracji, punkt Lagrange’a) – miejsce w przestrzeni w układzie dwóch ciał
powiązanych grawitacją, w którym ciało o pomijalnej masie może pozostawać w spoczynku względem ciał układu. Dla układu trzech ciał (np. Słońce, Mars, satelita) występuje pięć takich punktów,
L1÷L5.
Projekt koncepcyjny globalnego systemu ...
283
laserowej) położenie przestrzenne zespołów nadawczych i odbiorczych powinno
być stabilizowane z dokładnością rzędu 4 mrad.
Tabela. 2. Porównanie parametrów transmisji danych przez orbitery Marsa
Table 2. Comparison of data transmission parameters by Mars orbiter
Misja marsjańska
Parametry
transmisji
Data startu
Czas pracy
Moc źródeł
zasilania
Średnica
anteny [m]
Pasmo
Szybkość
transmisji
Technologia
Mars
Global
Surveyor
1996
10 lat
Mars
Mars
Reconnaissance Telecommunications
Orbiter25
Orbiter
2005
?
10 lat
10 lat
Mars
Odyssey
Mars
Express
2001
6 lat
2003
6 lat
0,98 kW
0,75 kW
0,5 kW
2 kW
1 kW
1,5
1,5
1,6
3
3 Ka / 0,3 laser
X
25÷85
kb/s
radio
X
30÷124
kb/s
radio
S/X
28÷182
kb/s
radio
X / Ka
X / Ka / laser
10000÷30000
kb/s – laser
radio / laser
500÷3500 kb/s
radio
Rys. 8. Przykładowe rozmieszczenie satelitów areostacjonarnych na
orbicie areostacjonarnej Marsa
Fig. 8. The exemplary arrangement of areostationary satellite on
areostationary orbit of Mars
25
Mars Telecommunications Orbiter – bezzałogowa sonda kosmiczna NASA, która miała zostać wystrzelona w kierunku Marsa we wrześniu 2009 r. Sonda miała być używana do przekazywania pakietów danych na Ziemię (hub) z różnych lądowników znajdujących się na Marsie i sond krążących
po jego orbicie przez co najmniej 10 lat za pośrednictwem łącza laserowego (Laser InfraRed,
λ = 1,06 µm, P = 5 W + teleskop Ø = 0,3 m; powyżej 2 GB danych dziennie). Odbiór na Ziemi
– teleskop Ø = 5 m.
284
A. Jaroszewicz
4. Podsumowanie
W pracy dokonano analizy współczesnych systemów nawigacji i łączności
z sondami międzyplanetarnymi w obrębie Układu Słonecznego, ze szczególnym
uwzględnieniem misji marsjańskich. Na podstawie obcnego poziomu eksploracji
Marsa został opracowany projekt koncepcyjny systemu nawigacji i łączności
(transmisji danych) dla obiektów znajdujących się na powierzchni Marsa
i w przestrzeni wokółmarsjańskiej. W pracy przedstawiono koncepcję wykorzystania konstelacji sześciu niskoorbitalnych sztucznych satelitów nawigacyjnych
i trzech stacjonarnych satelitów komunikacyjnych, umożliwiających realizację
ciągłej nawigacji i dwukierunkowej transmisji danych dla obiektów znajdujących się zarówno na powierzchni Marsa, jak i w bliskiej przestrzeni kosmicznej
za pośrednictwem łączy radiowych i optycznych (laser).
Literatura
[1] Chrzczonowski A. i in.: Projekt koncepcyjny marsjańskiego samolotu zasilanego
ogniwami fotoelektrycznymi. Mechanika w lotnictwie ML-XV, 2012.
[2] Godwin R.: Mars – historia podboju kosmosu. Prószyński Media, Warszawa 2011.
[3] Sanctis M. i in.: Flower constellation of Orbiters for Martian communication.
IEEE, 2007.
[4] Lauf J. i in.: Clock and iming in the NASA Deep Space Network. IEEE, 2005.
[5] Melbourne W.: Navigation between the Planets. Scientific American, June 1976.
[6] Bem D.J.: Systemy telekomunikacyjne, cz. III. Politechnika Wrocławska, Wrocław
1991.
[7] O’Keefe K.: Simulation and evaluation of the performance of the proposed Mars
Network Constellation. UCGE Reports No. 20191. University of Calgary, Calgary
2004.
[8] Palimerini G.: Design fo a Mars Relay and navigation satellite network. IEEE,
2003.
[9] Larson J. i in.: Space mission analysis and design. Wiley, Warszawa 1999.
[10] Tingting H.: A preliminary designation for constellation distribution for Mars
GNSS. IEEE, 2009.
[11] Ely T. i in.: Mars network constellation design drivers and strategies. AAs, 99-301.
[12] Januszewski J.: Systemy satelitarne GPS. Galileo i inne. PWN, Warszawa 2010.
[13] Pawelec J.: Radiosterowanie i łączność kosmiczna. WKiŁ, Warszawa 1991.
[14] Ley W.: Handbook of space technology. Wiley, Warszawa 2008.
[15] Zubrin R. i in.: Czas Marsa. Prószyński i S-ka, Warszawa 1997.
[16] Jaroszewicz A. i in.: Wykorzystanie energii słonecznej w technice kosmicznej.
Aktualne kierunki rozwoju energetyki. Politechnika Wrocławska, Wrocław 2012.
Projekt koncepcyjny globalnego systemu ...
285
CONCEPTUAL PROJECT OF GLOBAL NAVIGATION SYSTEM FOR MARS
Abstract
Mars has become the object of an unprecedented race of many countries in the exploration of
the planet, which is to become the crowning achievement of landing humans on the surface of the
Red Planet. Manned mission to Mars will require the construction of a global navigation system of
the planet and ensure continuous broadband data transmission to Earth. The contemporary navigation of interplanetary probes in outer space is a complex, time-consuming and expensive process
required to operate a complex ground-based infrastructure. The navigation process is fully nonautonomous and the probe, using on-board equipment, can not find its spatial position in taken
reference system. The article presents the conceptual project of Doppler global navigational system for Mars planet allowing for finding position of the object at the planet's surface and in space
at the time not exceeding two hours and the communication system assuring mutual communication between probes/lander and data retransmission from Mars to Earth.
Keywords: Mars, navigation system, data transmission
DOI:10.7862/rm.2013.25
Otrzymano/received: 15.09.2013
Zaakceptowano/accepted: 22.10.2013