Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
39
3. ZNACZENIE ROZKŁADU POISSONA I CIĄGŁE ZMIENNE LOSOWE
3.1. Związki między rozkładami: dwumianowym i Poissona
Rozkładem Poissona nazywamy prawdopodobieństwa
pk =
λk
k!
e − λ , gdzie λ = np .
(3.1)
Dla dużych n stosowanie rozkładu dwumianowego jest kłopotliwe i dlatego, gdy
spełnione są warunki twierdzenia Poissona, a więc gdy jest małe prawdopodobieństwo
sukcesu p i np → λ , to można zastąpić rozkład dwumianowy rozkładem Poissona. Tak więc
w praktyce, tam gdzie mamy małe prawdopodobieństwo sukcesu i dużą liczbę doświadczeń
Bernoulli’ego n zastępujemy rozkład dwumianowy rozkładem Poissona. Względy praktyczne
często pozwalają zastosować rozkład Poissona.
Z drugiej strony rozkład Poissona jest ważnym pojęciem teoretycznym, bowiem
reprezentuje najbardziej losowe zjawisko w zakresie dyskretnych zmiennych losowych, to
znaczy
takich, które przyjmują wartości liczb naturalnych lub liczb całkowitych. Może
trochę dziwić, że rozkłady są w jakimś sensie uporządkowane. Taką obiektywną miarą
uporządkowania rozkładów jest wariancja zmiennej losowej odzwierciedlająca średnie
odchylenie kwadratowe od wartości oczekiwanej. A więc w tym sensie najmniejsza
zmienność jest wtedy, gdy wariancja jest równa
zeru. Przedstawia to przypadek drugiego
końca przedziału zmienności rozkładów, odpowiadającego wielkościom stałym. Tak więc
nasz „przedział losowości” obejmuje również zmienne, które w istocie rzeczy są stałymi,
traktowanymi jak zmienne losowe o wariancji zero. Z tego względu ujęcia probabilistyczne są
ogólniejsze od modeli deterministycznych.
Rozkład Poissona daje dobre przybliżenie wartości rozkładu dwumianowego przy n
dostatecznie dużym, a p - małe. W tablicy 1 podano przykładowe wartości rozkładu
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
40
dwumianowego i rozkładu Poissona, dla k = 0,1,...,11, przy założeniu, że p = 0.02, a n = 100.
Tablica 3.1
Rozkład dwumianowy
k
n
n− k
P( X = k ) = p k (1 − p)
k
Rozkład Poissona
P( X = k )
k
np)
(
=
k!
0
0.13262
0.135333
1
0.27065
0.27067
2
0.27342
0.27367
3
0.18228
0.18044
4
0.09021
0.09022
5
0.03535
0.03609
6
0.01142
0.01203
7
0.00313
0.00343
8
0.00073
0.00085
9
0.00015
0.00019
10
0.00003
0.00004
11
0.00001
0.000007
e − np
Im p mniejsze, tym lepsze przybliżenie:
Rozkład Poissona ≡ Rozkład rzadkich zdarzeń.
Przykłady zastosowania rozkładu Poissona, jako przybliżenia rozkładu dwumianowego (Hellwig 1977)
Przykład 3.1
Jeżeli wiadomo, że wadliwość żarówek (tzn. przeciętny procent braków) wynosi 2%, w partii
liczącej 100 sztuk znajdzie się trzy sztuki złe?
W zadaniu tym p = 0.02, n =100, a więc np = 2, k = 3. Należy obliczyć
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
41
P( X < 4) = P( X = 0) + P( X = 1) + P( X = 2) + P( X = 3)
W tablicy rozkładu Poissona podane są wartości
k
P( X ≤ k ) = ∑
i=0
( np) i e − np .
i!
(3.2)
Dla np = 2 i k = 3 znajdujemy szukane prawdopodobieństwo 0.857.
Przykład 3.2
Wadliwość elementów elektronicznych wynosi 2%. Ile dobrych elementów należy dodać, aby
z prawdopodobieństwem nie mniejszym niż 0.95 partia zawierała 100 sztuk dobrych?
W zadaniu tym znamy p = 0.02, n = 100, P( X ≤ k ) = 0.95 , np = 2. Szukamy k.
W tablicy rozkładu Poissona w wierszu z nagłówkiem 2 szukamy liczby większej od 0.95.
Jest to 0.983, która znajduje się w kolumnie z nagłówkiem k = 5. Tak więc należy dodać 5
sztuk dobrych elementów.
Przykład 3.3
Wadliwość elementów elektronicznych nie jest znana. Czy można z prawdopodobieństwem
większym niż 0.90 twierdzić, że wadliwość jest mniejsza niż 0.02, jeśli w partii liczącej 100
sztuk znaleziono 7 sztuk złych?
Przy założeniu, że p = 0.02 mamy
P( X > 0) = 0.865 < 0.90
Oznacza to, że gdybyśmy w naszej partii nie znaleźli ani jednego wadliwego elementu, to i tak
nie moglibyśmy z prawdopodobieństwem większym niż 0.90 twierdzić, że wadliwość jest
mniejsza niż 0.02. Ponieważ w partii znaleziono 7 sztuk złych, a przy wadliwości 0.02 i
wielkości partii 100 sztuk prawdopodobieństwo tego, że liczba braków jest większa niż 6
wynosi 0.005, a więc jest to zdarzenie bardzo mało prawdopodobne. Stąd wniosek, że
wadliwość jest większa niż 0.02.
42
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
3.2. Rozkład geometryczny
Rozkładem geometrycznym nazywa się prawdopodobieństwo pierwszego sukcesu po l
porażkach w doświadczeniach Bernoulli’ego, na przykład przechodzień, który na ulicy
jednokierunkowej po przepuszczeniu l samochodów znajduje wreszcie właściwy odstęp:
prawdopodobieństwo nie zaakceptowania odstępu przez przechodnia wynosi q
prawdopodobieństwo nie zaakceptowania dwóch odstępów wynosi q 2
prawdopodobieństwo nie zaakceptowania trzech odstępów wynosi q 3
...
prawdopodobieństwo nie zaakceptowania l odstępów wynosi q l
prawdopodobieństwo nie zaakceptowania l odstępów i zaakceptowania l + 1 odstępu:
p l = pq l
,
p + q = 1.
(3.3)
Jest to rozkład geometryczny.
Uogólnieniem rozkładu geometrycznego jest rozkład ujemny dwumianowy wyrażający
prawdopodobieństwo k - tego sukcesu po l porażkach:
l + k − 1 k l
pl , k =
p q ,
k −1
(3.4)
o następujących charakterystykach
E( X ) = m =
k (1 − p)
,
p
V( X) = σ 2 =
k (1 − p)
.
p2
(3.5)
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
43
3.3. Ciągłe zmienne losowe
Dotychczasowe pojęcia zmiennych losowych odnosiły się do dyskretnych zmiennych
losowych, a więc przyjmujących tylko wartości dyskretne. Nasze potrzeby praktyczne
wymagają jednak stosowania również pojęć ciągłych zmiennych losowych. Najprostszym
przykładem ciągłej zmiennej losowej jest odstęp czasu między kolejnymi pojazdami
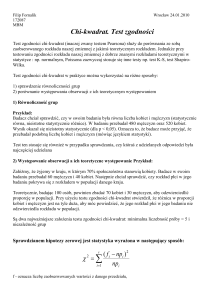
obserwowanego potoku ruchu. Dobrą ilustracją odstępów potoku ruchu jest wykres ruchu
przedstawiający rozmieszczenie na
drodze i w czasie poszczególnych pojazdów
obserwowanego potoku ruchu - Rys. 3.1.
s
DROGA
i-1
s1
i
s2
i+1
i+2
t1
τ i +1,i + 2
t2
t
CZAS
Rys. 3.1. Wykres ruchu pojazdów i-1,i ,i+1,i+2 na drodze s w czasie t
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
44
Jak widać, wykres ruchu jest graficznym przedstawieniem rozmieszczenia pojazdów
na drodze w określonym przedziale czasu i jest to dość kłopotliwe w rzeczywistej sytuacji na
drodze,
ponieważ jednocześnie należy rejestrować przejazd wszystkich pojazdów
znajdujących się w różnych miejscach drogi. Najlepiej zrobić to z lotu ptaka albo
jednocześnie rozmieścić w każdym pojeździe obserwatora, który rejestruje przejazd na drodze
i w czasie, to znaczy wykreśla przebieg jednego pojazdu.
Pojęcie wykresu ruchu pochodzi z inżynierii ruchu kolejowego, gdzie odgrywa ważną
rolę wśród konstruktorów wykresu ruchu kolejowego oraz dyspozytorów i dyżurnych ruchu.
Jest to przede wszystkim pojęcie planistyczne, pozwalające na ścisłe zaplanowanie ruchu
kolejowego tak, aby nie zdarzały się kolizje ruchowe i zakłócenia płynności ruchu,
wydłużające
czas podróży. Tak więc w inżynierii ruchu kolejowego używa się przede
wszystkim zaplanowanego wykresu ruchu, jako formy tworzenia dopuszczalnych rozkładów
jazdy pociągów. W inżynierii ruchu kolejowego istnieje również rzeczywisty wykres ruchu
pociągów tworzony przez dyspozytorów, będący zapisem co dobowej realizacji założeń
kolejowego rozkładu jazdy pociągów, różniących się zazwyczaj od przyjętych założeń.
Tworzenie rzeczywistego wykresu ruchu na drodze samochodowej wymagałoby
przekazywania na bieżąco położenia na drodze i w czasie poszczególnych pojazdów do
miejsca rysowania wykresu ruchu, co - jak już stwierdzono - jest kłopotliwe, nawet przy
dzisiejszej technice komputerowej. Tradycyjne podejście do obserwacji potoku ruchu polega
na obserwacji odstępów czasu w pewnym ustalonym miejscu drogi, albo na obserwacji
odstępów drogi w danej chwili z samolotu, co daje rozmieszczenie pojazdów na drodze w
danej chwili. Gdybyśmy dość często chwytali rozmieszczenie pojazdów na drodze, to można
by uzyskać pewne punkty na płaszczyźnie wykresu ruchu, pozwalające na lokalne interpolacje
przebiegu poszczególnych pojazdów. Gdy nie mamy samolotu i wielkiej liczby obserwatorów
w każdym pojeździe z łącznością radiową z komputerem centralnym, to trudno jest wykreślić
rzeczywisty wykres ruchu samochodowego na naszych intensywnie eksploatowanych
drogach. Tak więc musimy mieć świadomość wielkich ograniczeń technicznych i
finansowych naszych obserwacji potoku ruchu transportowego. Należy zawsze dobrze
przeanalizować celowość obserwacji potoków ruchu.
Nasze możliwości techniczne ograniczają się zazwyczaj do możliwości obserwacji
odstępów czasu między kolejnymi pojazdami w ustalonym miejscu i okresie. Nie są to wielkie
możliwości obserwacyjne,
zwłaszcza gdy posługujemy się kartką papieru i zegarem.
W ostatnim okresie pojawiły się prace nad wykorzystaniem komputerów do analizy zapisu
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
45
kamery video zainstalowanej w interesującym nas miejscu powstawania dużych zakłóceń
ruchu. Urządzenia te charakteryzują się dużą zawodnością techniczną – jak na razie – nie są w
powszechnym użyciu.
Gdy obserwujemy odstępy czasu pomiędzy kolejnymi pojazdami τ i + 1,i + 2 , jest to
równoważny sposób obserwacji potoku ruchu do liczby przybyć na jednostkę czasu. Są to
jednak zmienne losowe, które przyjmują wartości rzeczywiste, a więc ciągłe zmienne losowe.
Χ = R1 .
(3.6)
Mówimy, że zmienna losowa X o dystrybuancie F jest typu ciągłego, jeżeli istnieje taka
f ≥ 0 , że
x
F ( x) =
∫ f (u)du .
(3..7)
−∞
Funkcję f nazywamy gęstością rozkładu prawdopodobieństwa.
Dla dyskretnych zmiennych losowych wartość oczekiwana wynosi
E ( X ) = ∑ x k p( x k ) .
(3.8)
E ( X ) = m = ∫ xf ( x )dx .
(3.9)
Dla ciągłych zmiennych losowych:
R1
Natomiast wariancja zmiennej losowej
V ( X ) = σ 2 = E ( X − E ( X )) = E ( X 2 ) − E 2 ( X ) .
2
Dla dyskretnej zmiennej losowej mamy
(3.10)
46
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
E X 2 = ∑ x k2 p k ,
( )
(3.11)
k
a dla ciągłych zmiennych losowych mamy:
+∞
( ) = ∫ x f ( x)dx .
E X
2
2
(3.12)
−∞
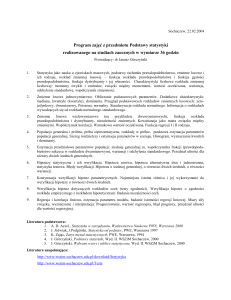
3.4. Rozkład jednostajny
Mówimy, że X ma rozkład jednostajny (prostokątny, równomierny) w przedziale
a , b , jeżeli ma funkcję gęstości
0 x ≤ a
1
f (x ) =
a < x ≤ b (3.13)
b
−
a
0 x > b
f ( x)
b
x
b
x
a
Dystrybuanta rozkładu jednostajnego wynosi
0 x ≤ 0
x − a
F ( x) =
a < x ≤ b (3..14)
b − a
1 x > b
F( x)
a
E( X ) = m =
a +b
2
V( X ) = σ 2 =
(b − a) 2
12
.
(3.15)
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
47
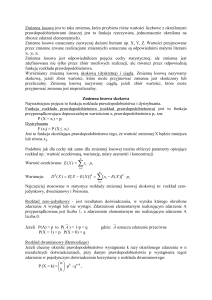
Przykład 3.4 (Plucińscy,1990))
Punkt materialny M porusz się ruchem jednostajnym po okręgu o promieniu r. Niech
O będzie ustalonym punktem, natomiast X długością łuku łączącego punkty OM . Określić
rozkład zmiennej losowej X. Wykreślić funkcje gęstości i dystrybuantę zmiennej losowej X.
X ma rozkład jednostajny na odcinku ( 0,2πr ) , a więc
0 x < 0
1
0 ≤ x ≤ 2πr
f ( x) =
2πr
0 x > 2πr
0 x ≤ 0
x
0 < x ≤ 2πr .
F ( x) =
2πr
1 x > 2πr
(3.16)
f ( x)
(3.17)
F( x)
πr
3 2 πr
2πr
πr
x
πr 1
P( X < πr ) = F (πr ) =
=
2πr 2
3 2 πr
2πr x
3
πr
3
3
1
P X > πr = 1 − F πr = 1 − 2 = .
2
2
2πr 4
Przykład 3.5
Pociągi elektryczne przyjeżdżają na stację co 10 minut. Pasażer przychodzi na stację w
pewnym przypadkowym momencie czasu. Niech X oznacza czas oczekiwania na przybycie
pociągu. Określić rozkład X. Znaleźć f, F, obliczyć P( X < 8) .
X ma rozkład jednostajny, a więc:
0 x ≤ 0
x
F ( x) =
0 < x ≤ 10
10
1 x < 10.
1
0 ≤ x ≤ 10
f ( x ) = 10
0 dla pozostalych x.
8
1
dx = 0.8 .
10
0
P( X < 8) = ∫
48
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
3.5. Rozkład jednopunktowy
Gdy cała masa prawdopodobieństwa skupiona jest w jednym punkcie, można go
określić jako szczególny przypadek rozkładu jednostajnego, gdy a = b .
Stałe odstępy między pociągami i samochodami są rozkładem jednopunktowym.
Tak więc zmienność, na przykładzie rozkładu jednostajnego, można uporządkować: jedna
skrajność, gdy b zmierza do nieskończoności, to jest to całkowita zmienność, natomiast gdy b
zmierza do a, to mamy brak losowości (wariancja równa zeru).
Stałe odstępy w ruchu samochodowym i kolejowym powstają w miejscach bardzo
dużych zagęszczeń potoków ruchu. Są to, nazywane czasem „ruchomymi kolejkami” lub
„kolejkami ruchowymi”, miejsca tworzenia się kolejek, w których ruch często odbywa się
bardzo wolno w równych odstępach. A więc bardzo złożone zjawisko ruchowe prowadzi do
bardzo prostego modelu probabilistycznego. Właściwie jest to zdegenerowany model
deterministyczny. Jest swoisty „paradoks”, że bardzo wiele składników losowych daje
wypadkowy proces zdeterminowany.
Z drugiej strony, równoodstępowość potoku ruchu jest bardzo pożądanym zjawiskiem
najefektywniejszego wykorzystania drogi. Ideałem by było, aby jednocześnie wystąpiły
zerowe straty czasu podróży, przy równomiernym wykorzystaniu drogi. Są to, gdy się
zastanowić, sprzeczne postulaty. Dlatego w praktyce interesuje nas pewien kompromis
między efektywnością wykorzystania drogi a wydłużeniem czasu podróży.
Znaczenie rozkładu Poissona i ciągłe zmienne losowe 3
Problemy rozdziału 3
1. Jakie są teoretyczne względy stosowania rozkładu Poissona?
2. Jakie są praktyczne względy stosowania rozkładu Poissona?
3. Rozkład geometryczny.
4. Rozkład ujemny dwumianowy.
5. Czy ruch kolejowy różni się od ruchu samochodowego?
6. Czy ruch kolejowy różni się od ruchu tramwajowego?
7. Czy wykres ruchu kolejowego przedstawia odstępy między pociągami?
8. Czy wykres ruchu samochodowego można łatwo uzyskać?
9. Dualność wykresu ruchu w inżynierii ruchu kolejowego.
10. Gdzie instaluje się urządzenia przetwarzania obrazu ruchu samochodowego?
11. Rozkład jednostajny.
12. Rozkład jednopunktowy.
49