Zasady syntezy elektronicznych układów pomiarowych
1. Wiadomości wstępne
Pomiar moŜe być interpretowany jako proces zbierania, transportu i wstępnego
przetwarzania informacji. Pozwala to traktować aparaturę pomiarową jako tor przesyłu
informacji i korzystać przy jego optymalizacji ze zdobyczy dziedziny wiedzy zwanej teorią
informacji. Jak wiadomo informacja moŜe być przekazywana wyłącznie w postaci tzw.
sygnału. Sygnał powstaje przez odpowiednie modulowanie informacji nośnika
energetycznego. Transport informacji w postaci sygnału wykazuje wiele podobieństw do
transportu energii, stanowiącej jego nośnik. W szczególności transportowi energii zawsze
towarzyszy jej rozpraszanie (straty). Podobnie rozpraszaniu (bezpowrotnej stracie) ulega
część informacji zawartej w przekazywanym sygnale. Straty te, nazywane inaczej
zniekształceniami sygnału, w klasycznej teorii metrologii odpowiadają pojęciu błędów
pomiarowych. Minimalizacja błędów pomiarowych sprowadza się więc do zapobiegania
zniekształceniom sygnału w aparaturze pomiarowej. Współczesna aparatura pomiarowa
najczęściej posługuje się sygnałem, w którym nośnikiem energetycznym jest energia
elektryczna. Zakładając, Ŝe zestaw aparatury (tor pomiarowy) do danego zadania
pomiarowego jest funkcjonalnie prawidłowy (nie popełniono błędów przy opracowaniu
zasady pomiaru, metody pomiarowej itp.) oraz, Ŝe sprawne są poszczególne człony zestawu
- na ogół odrębne przyrządy, we własnych obudowach, tzw. „przyrządy uniwersalne” ewentualnych zniekształcenie sygnału naleŜy upatrywać w połączeniach pomiędzy
członami. Zagadnienia związane z prawidłowym połączeniem poszczególnych przyrządów,
członów większych zestawów aparatury, są przedmiotem niniejszego ćwiczenia.
2. Własności wejściowe i wyjściowe przyrządów - członów aparatury
Nie wnikając w tym miejscu, w sposób przetwarzania sygnału wewnątrz przyrządu
pomiarowego, prawidłowe połączenia przyrządów pomiarowych w zestawy, moŜna
uzyskać jedynie w oparciu o znajomość parametrów wejściowych i wyjściowych
poszczególnych aparatów. Parametry te są zawarte w dokumentacji technicznej
przyrządów, czasem są umieszczane na ich obudowie a niektóre są objęte normalizacją.
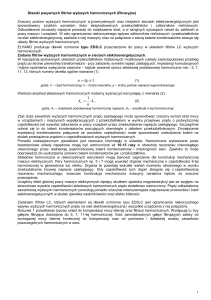
2.1. Parametry wejściowe
Rys. 1 przedstawiono układ zastępczy wejścia, słuszny dla większości przyrządów
pomiarowych. Wartośći napięcia wejściowego U we lub prądu wejściowego I we (są one
związane uogólnionym prawem Ohma) są parametrem sygnału wejściowego zawierającym
informacje. Wartość ta podawana jest zwykle jako skuteczna (RMS), szczytowa lub
amplituda napięcia. Rwe jest rezystancją wejściową (opornością czynną przyrządu widzianą
od strony zacisków wejściowych), Cwe jest pojemnością wejściową.
1
Iwe
Uwe
Rwe
Cwe
Rys. 1. Schemat zastępczy układu wejścia
2.2. Parametry wyjściowe
Jeden z moŜliwych wariantów układu zastępczego „czynnego” wyjścia przyrządu
przedstawia rys. 2 (wyjściem czynnym nazywamy wyjście, z którego moŜe być czerpana
energia elektryczna). Jeśli E jest siłą elektromotoryczną źródła napięciowego, szeregowa
rezystancja Rwy - rezystancją wyjściową urządzenia a Ro - oporność obciąŜenia reprezentuje
w tym przypadku rezystancję wejściową urządzenia współpracującego z wyjściem
przyrządu. Wartości U wy , I wy są parametrami sygnału wyjściowego zawierającymi
informacje.
Rwy
E
Iwy
Uwy
Rwe
Rys. 2. Schemat zastępczy czynnego układu wyjściowego
Z
∆R, ∆C lub ∆L
Rys. 3. Schemat układu wejściowego
Zasadniczo inny jest układ zastępczy tzw. wyjścia biernego (parametrycznego).
Przyrządy posiadające takie wyjście nie generują w swoim wnętrzu energii elektrycznej a
więc nie wytwarzają sygnału. Informacja pojawia się na takim wyjściu w postaci zmiany
2
któregoś z parametrów obwodu (rezystancji, pojemności lub indukcyjności) i moŜe być
przekształcona w sygnał dopiero w następnym członie aparatury, odpowiednio
skonstruowanym. Schemat zastępczy wyjścia parametrycznego przedstawia ogólnie rys. 3,
gdzie Z jest uogólnioną zastępczą impedancją wyjściową układu.
3. Własności przejściowe przyrządów
Prawidłowe przetwarzanie sygnałów wewnątrz przyrządu (między jego wejściem a
wyjściem) odbywa się zawsze tylko w pewnych granicach zmian sygnału wejściowego.
Najistotniejsze są dwa ograniczenia opisane niŜej.
3.1 Ograniczenia wynikające z kształtu charakterystyki statycznej
Statyczną funkcją przetwarzania przyrządu nazywamy zaleŜność przedstawioną graficznie
jako charakterystykę statyczną ( rys. 4)
Y = f( X ) ,
gdzie:
Y - istotna z punktu widzenia zawartości informacji cecha sygnału wyjściowego,
X - istotna z punktu widzenia zawartości informacji cecha sygnału wejściowego.
y
x
y
x
część
robocza
obszar
przesterowania
Rys. 4. Charakterystyka statyczna przyrządu
Część robocza charakterystyki statycznej jest zwykle prostoliniowa.
3.2
Ograniczenia częstotliwościowe
Błędy przetwarzania związane z częstotliwością sygnału wejściowego określa
transmitancja układu. Dla sygnału sinusoidalnego moduł transmitancji ujmuje zaleŜność:
Y( ω )
| G(jω ) |=
= K( ω )
X( ω)
gdzie:
Y ( ω ) - amplituda sygnału wyjściowego,
X ( ω ) - amplituda sygnału wejściowego.
3
K(ω)
∆K(ω)
ω
pasmo przenoszenia
Rys. 5. Charakterystyka częstotliwościowa modułu przyrządu
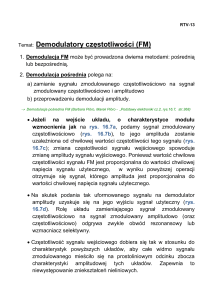
ZaleŜność K = f ( ω ) nazywamy charakterystyką amplitudowo - częstotliwościową.
Przykładową charakterystykę częstotliwościową modułu przedstawia rys. 5, na którym
zaznaczono szerokość pasma częstotliwości, w którym sygnał przenoszony jest z
dopuszczonym błędem ∆K.
Zniekształcenia fazowe sygnału, związane z zaleŜnością argumentu transmitancji od
częstotliwości, w większości przypadków są niewielkie przy transmisji informacji i z tego
względu są zaniedbywane.
4. Podstawowe reguły dotyczące współpracy członów toru pomiarowego
W oparciu o podane wiadomości moŜna sformułować trzy podstawowe zasady
szeregowego połączenia członów aparatury, optymalizujące transmisję informacji.
Omówimy je kolejno.
4.1. Dopasowanie oporności wejściowej i wyjściowej.
Przez „dopasowanie” rozumiemy tutaj właściwe dobranie oporności wyjściowych i
wejściowych członów współpracujących - tak, by maksymalnie wykorzystać energię
sygnału, a tym samym zapewnić małe rozproszenie informacji.
Rozpatrując układ zastępczy połączenia między członowego aparatury przedstawiony na
rys. 6 moŜemy określić:
natęŜenie prądu wyjściowego:
1
1
R wy
I=E⋅
=E⋅
R we
R we + R wy
+1
R wy
napięcie wyjściowe:
1
U = I ⋅ R we = E ⋅
R wy
+1
R we
moc wyjściową:
2
R we
P= U = E 2 ⋅
.
2
( R we + R wy )
R we
4
I
Rwy
Rwe
U
E
P
Rys. 6. Schemat zastępczy połączenia między - członowego aparatury
P, U, I
wartości maksymalne
U
P
I
1.0
Rwe
Rwy
Rys. 7. Wpływ rezystancji obciąŜenia na parametry wyjściowe układu
Otrzymane zaleŜności moŜna przedstawić graficznie (rys. 7).
Dla uproszczenia zaniedbano występujące w obwodzie wejściowym (patrz rys. 1)
pojemność Cwe, co nie zmienia jednak ogólnej prawidłowości i pozwala sformułować
poniŜsze ogólne wnioski:
•
największa moc jest przekazywana z członu do członu przy spełnieniu warunku:
R we = R wy ,
tzn. najmniejszym stratom mocy towarzyszą najmniejsze straty informacji. Takie
dopasowanie stosuje się szczególnie tam, gdzie potrzebna jest duŜa moc do sterowania
urządzenia (rejestratory, wskaźniki, głośniki itp.).
•
największe napięcie na wejściu członu występuje gdy :
R we» R wy .
Dopasowanie „napięciowe” wykorzystuje się w przypadkach, gdy informacja
zakodowana jest w sygnale w postaci zmian napięcia.
•
największy prąd w obwodzie wejściowym przepływa gdy zachodzi związek:
R we « R wy .
Jest to tzw. dopasowanie „prądowe” i stosuje się je, gdy informacja kodowana jest w
postaci zmian prądu. Dodatkowym ograniczeniem jest tu tzw. wydolność prądowa
wyjścia tzn. nieprzekraczanie maksymalnej dopuszczalnej wartości prądu w obwodzie
wyjściowym.
5
4.2. Dopasowanie amplitudy zmian sygnału
Zagadnienie dotyczy właściwego wykorzystania charakterystyki statycznej
przetwornika sterowanego. Na rys. 4 zaznaczono roboczą część charakterystyki.
Wykroczenie poza ten obszar powoduje przesterowanie przyrządu i wzrost zniekształceń
sygnału.
Praktycznie dopasowanie realizuje się przez odpowiedni wybór zakresu pomiarowego
przyrządu sterowanego. Większość przyrządów uniwersalnych to przyrządy
wielozakresowe, umoŜliwiające łatwy wybór zakresu. W przypadkach szczególnych
stosować naleŜy odrębne tłumiki lub wzmacniacze sygnału.
We wzmacniaczu w obszarze przesterowania następuje wprowadzenie do sygnału
wyjściowego składowych harmonicznych nieistniejących na wejściu. Miarą przesterowania
jest tzw. współczynnik zawartości harmonicznych (h1) określony zaleŜnością:
n
∑U
h1 =
i= 2
U1
2
i
⋅ 100%
gdzie:
Ui - amplitudy poszczególnych składowych harmonicznych.
ZaleŜność współczynnika zawartości harmonicznych od napięcia wejściowego (U1)
przedstawia rys .8.
h, %
hdop
U1
część
liniowa
obszar
przesterowania
Rys. 8. Wpływ napięcia wejściowego na współczynnik zawartości harmonicznych
4.3. Dopasowanie częstotliwościowe
Prawidłowo zaprojektowany układ pomiarowy powinien przenosić w jednakowy
sposób wszystkie znaczące składowe harmoniczne widma sygnału. Istotną sprawą jest
dobranie, pod tym kątem widzenia, charakterystyk amplitudowo - częstotliwościowych
wszystkich członów toru pomiarowego. Rys. 9 jest przykładową ilustracją zagadnienia.
6
K
f
A
f min
f max
f
Rys. 9. Charakterystyka amplitudowo-częstotliwościowa całego toru pomiarowego: a)
charakterystyka przyrządu, b) widmo sygnału
Sytuacja jest szczególnie trudna przy operowaniu sygnałami w postaci impulsów o
stromych zboczach, które posiadają widma częstotliwościowe sięgające bardzo wysokich
częstotliwości. Aparatura pomiarowa musi wtedy posiadać szerokie pasmo przenoszenia.
NaleŜy się teŜ liczyć ze stratami w przewodach łączących przyrządy, które - mimo, Ŝe
krótkie - muszą by traktowane jako złoŜone układy RLC, wprowadzające znaczące
ograniczenia pasma przenoszenia. Daje się tu równieŜ zauwaŜyć zjawiska falowe w
przewodach.
1. Zasady pomiarów parametrów wzmacniaczy
Do podstawowych parametrów charakteryzujących wzmacniacz pomiarowy
elektroakustyczny naleŜy zaliczyć:
• współczynnik zawartości harmonicznych,
• współczynnik zniekształceń intermodulacyjnych,
• znamionową moc wyjściową,
• charakterystykę przenoszenia,
• pasmo przenoszenia mocy,
• impedancję wejściową,
• impedancję wyjściową,
• znamionowe napięcie wejściowe,
• tłumienie przesłuchu między poszczególnymi wejściami wzmacniacza,
• tłumienie przesłuchu między kanałami akustycznego wzmacniacza
stereofonicznego,
• poziom zakłóceń i szumów.
czy
7
Współczynnik zawartości harmonicznych: zdefiniowany równaniem (9) wyznaczany jest
na podstawie pomiaru amplitud napięć o częstotliwościach harmonicznych, występujących
na wejściu wzmacniacza pobudzanego sygnałem harmonicznym. Zgodnie z
PN-74/T-06251/07 współczynnik ten dla wzmacniaczy akustycznych Hi-Fi nie moŜe
przekraczać:
• 1% - dla wzmacniaczy wejściowych w zakresie częstotliwości 40÷16000 Hz przy
pełnym wysterowaniu,
• 1% - dla wzmacniaczy mocy i wzmacniaczy pełnym w paśmie przenoszenia mocy w
zakresie częstotliwości 40÷12500 Hz i w zakresie mocy wyjściowej od znamionowej do
zmniejszonej o 20dB.
Na krańcach zakresu moc moŜe spadać przy podanych zniekształceniach najwyŜej o 3 dB.
Pasmo przenoszenia mocy: zakres częstotliwości, wewnątrz którego przy danym
współczynniku zawartości harmonicznych moc wyjściowa spada na krańcach zakresu o 3
dB ( do połowy wartości mocy znamionowej).
Znamionowe napięcie wejściowe: jest to napięcie na wejściu wzmacniacza, które przy
maksymalnej wartości wzmocnienia, przy określonej częstotliwości, zapewnia na wyjściu
moc znamionową.
Znamionowa moc wyjściowa: jest to moc, którą wzmacniacz moŜe wydzielić na
znamionowej impedancji obciąŜenia przy danej częstotliwości lub w danym paśmie
częstotliwości, bez przekroczenia określonego współczynnika zniekształceń nieliniowych w
ciągu 10 minut.
Przed przystąpieniem do pomiarów wzmacniacza naleŜy doprowadzić go do
znamionowych warunków pracy. Np. dla wzmacniacza m.cz są to następujące wymagania:
• powinien być zasilany ze źródła o znamionowych parametrach, których wahania
nie powinny przekracza ±1%,
• wyjście wzmacniacza obciąŜone jest normalnym obciąŜeniem zastępczym
(rezystancja o określonej przez producenta wartości, równej impedancji przy
częstotliwości 1 kHz, która zastępuje odpowiednio: głośnik, zespół głośników
lub wejście następnego członu wzmacniającego),
• regulator wzmocnienia ustawiony jest na maksimum,
• regulator równowaŜenia kanałów, o ile istnieje, jest nastawiony w połoŜeniu
zerowym,
• regulatory barwy dźwięku ustawione są w połoŜeniu zapewniającym uzyskanie
płaskiej charakterystyki przenoszenia lub maksymalnie do niej zbliŜonej,
• do wejścia dołączone jest źródło sygnału sinusoidalnego o częstotliwości 1 kHz
i o impedancji wewnętrznej przewidzianej do współpracy z danym wejściem;
poziom sygnału winien zapewnić uzyskanie na wyjściu znamionowej mocy
wyjściowej,
• pozostałe wejścia przy układach wielowejściowych są obciąŜone
znamionowymi impedancjami źródeł, przewidzianych do współpracy z danym
wejściem.
5.1
Pomiar współczynnika zawartości harmonicznych
Do wejścia wzmacniacza dołączany jest odpowiednio dopasowany parametrami
generator napięcia sinusoidalnego. Na jego wyjściu naleŜy zmierzyć moc wyjściową i
8
współczynnik zawartości harmonicznych, przy czym wyjście jest obciąŜone tzw.
normalnym obciąŜeniem zastępczym. Wartość współczynnika zawartości harmonicznych
wyznacza się:
a) w funkcji częstotliwości przy stałej mocy wyjściowej; pomiar wykonuje się zmieniając
częstotliwość sygnału wejściowego i ustalając dla kaŜdej częstotliwości takie napięcie
wejściowe, przy którym moc wyjściowa pozostaje stała; dla kaŜdej wartości
częstotliwości mierzy się wartość współczynnika zawartości harmonicznych na wyjściu
wzmacniacza; wyznacza się zaleŜność h=f(f) przy stałej wartości mocy,
b) w funkcji napięcia wejściowego przy stałej częstotliwości; pomiar wykonuje się przy
określonej częstotliwości, zmieniając napięcie wejściowe i utrzymując stałą moc
wyjściową wzmacniacza za pomocą regulatora wzmocnienia; dla kaŜdego połoŜenia
regulatora wzmocnienia mierzy się napięcie wejściowe i współczynnik zawartości
harmonicznych,
c) w funkcji mocy wyjściowej przy stałej częstotliwości, pomiar wykonuje się przy
określonej częstotliwości, zmieniając napięcie wejściowe mierzy się moc wyjściową
oraz współczynnik zawartości harmonicznych,
d) w funkcji napięcia wejściowego przy stałym wzmocnieniu wzmacniacza i przy stałej
częstotliwości wzmacniacza; dla określonego wzmocnienia pomiar wykonuje się
zmieniając napięcie wejściowe i mierząc napięcie wyjściowe oraz współczynnik
zawartości harmonicznych na wyjściu wzmacniacza.
5.2
Charakterystyka przenoszenia
Do wzmacniacza obciąŜonego normalnym obciąŜeniem zastępczym dołącza się
generator napięcia sinusoidalnego. Ustala się znamionowe warunki pracy. Następnie
zmniejsza się sygnał na wejściu o 10 dB ( np. z 1 V na 0,301 V). Zmieniając częstotliwość
sygnału na wejściu mierzy się napięcie wyjściowe. Podczas pomiaru naleŜy utrzymywać
stałą amplitudę napięcia wejściowego.
Przy pomiarze pasma przenoszenia mocy, amplitud sygnału wejściowego zwiększa się do
takiej wartości aby uzyskać na wyjściu określony współczynnik zawartości harmonicznych
i określoną moc wyjściową. Pomiary wykonuje się w funkcji częstotliwości dla stałej
wartości współczynnika zawartości harmonicznych.
9