ELEKTRYKA
Zeszyt 3 (219)
2011
Rok LVII
Dariusz ŚWISULSKI
Katedra Metrologii i Systemów Informacyjnych, Politechnika Gdańska
PARAMETRY AKWIZYCJI W SYSTEMACH Z NAPIĘCIOWYMI
I CZĘSTOTLIWOŚCIOWYMI TORAMI POMIAROWYMI
Streszczenie. W artykule przedstawiono metodę przetwarzania sygnału
impulsowego modulowanego częstotliwościowo. Pozwala ona na uzyskanie informacji
o częstotliwości sygnału impulsowego modulowanego częstotliwościowo w tych samych
chwilach czasu, w których są próbkowane sygnały w torach napięciowych. Pozwala też
na stosowanie tych samych parametrów akwizycji dla torów z napięciowym
i częstotliwościowym nośnikiem informacji.
Słowa kluczowe: akwizycja sygnałów, sygnał impulsowy modulowany częstotliwościowo, efektywna
liczba bitów
ACQUISITION PARAMETERS IN SYSTEMS WITH VOLTAGE
AND FREQUENCY CHANNELS
Summary. A method for processing of frequency-modulated pulse signal is
presented in this paper. The method allows to acquire information about frequency of
pulse signal in the same instants which voltage signals are sampled. The method allows
using the same acquisition parameters for voltage and frequency data carrier.
Keywords: signal acquisition, frequency-modulated pulse signal, effective number of bits
1. WPROWADZENIE
W technice pomiarowej, przy przetwarzaniu dowolnej wielkości na postać cyfrową,
bardzo często jest wykorzystywany tor pomiarowy z przetwarzaniem mierzonej wielkości na
napięcie (lub prąd). Napięcie to w bloku przetwornika analogowo-cyfrowego, w procesie
próbkowania i kwantowania jest przetwarzane na postać cyfrową, zapisywaną następnie do
pamięci [1].
Czasami jako sygnały pośrednie w torze pomiarowym są wykorzystywane sygnały
impulsowe modulowane częstotliwościowo [2-4]. Sygnał impulsowy jako sygnał pośredni
36
D. Świsulski
jest stosowany chętnie ze względu na prosty sposób przetworzenia na postać cyfrową i małą
wrażliwość na zakłócenia, np. przy przesyłaniu na większe odległości.
W wieloparametrowych systemach pomiarowych często są wykorzystywane jednocześnie
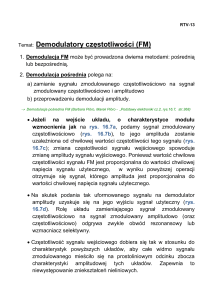
obie metody (rys. 1). W pozycji [5] przedstawiono przykład takiego systemu.
Rys. 1. System pomiarowy z kanałami napięciowymi i częstotliwościowymi: x/U – przetwornik
wielkości mierzonej na napięcie, x/f – przetwornik wielkości mierzonej na częstotliwość,
A/D – przetwornik analogowo-cyfrowy, f/D – przetwornik częstotliwości na wartość cyfrową,
M – pamięć
Fig. 1. Measurement system with voltage and frequency channels: x/U – measured quantity-voltage
converter, x/f – measured quantity-frequency converter, A/D – analogue-digital converter,
f/D - frequency-digital converter, M – memory
Przy połączeniu obu typów torów pomiarowych pojawia się trudność zapewnienia
uzyskania informacji o wartości sygnału w torach napięciowych i częstotliwych ze stałą i taką
samą częstotliwością, uzyskania informacji w tych samych chwilach czasu, a także
zapewnienia założonej rozdzielczości, bez względu na wartość wielkości mierzonej.
2. CZĘSTOTLIWOŚĆ PRÓBKOWANIA
Przetwarzanie analogowo-cyfrowe jest procesem, w którym sygnał analogowy x(t),
określony w każdej chwili czasowej w przedziale obserwacji, zostaje przetworzony na ciąg N
liczb {x[0], x[1], x[2], …, x[N-1]} odpowiadających wartościom chwilowym sygnału
analogowego w stałych odstępach czasu. Przetwarzanie analogowo-cyfrowe obejmuje trzy
etapy: próbkowanie, kwantyzację i kodowanie [6].
Parametry akwizycji w systemach…
37
Próbkowanie sygnału ciągłego x(t) polega na akwizycji w dyskretnych momentach czasu
n·t próbek x(n·t). W wyniku próbkowania otrzymuje się ciąg próbek sygnału {x(t0), x(t1),
x(t2), …, x(tN-1)} w dyskretnych chwilach ti.
Kwantyzacja sygnału ciągłego x(t) polega na przypisaniu jego próbkom wartości
dyskretnych ze skończonego zbioru przedziałów kwantowania.
Chwile próbkowania ti przy przetwarzaniu analogowo-cyfrowym są wyznaczane przez
impulsy taktujące z generatora wzorcowego. Częstotliwość sygnału taktującego określa
częstotliwość próbkowania, przy czym okres tego sygnału nie może być mniejszy od czasu
przetwarzania analogowo-cyfrowego.
Uzyskanie ciągu próbek sygnału w torze częstotliwościowym, położonych w tych samych
chwilach czasu t0, t1, t2, …, tN-1 wymaga zastosowania specjalnej metody.
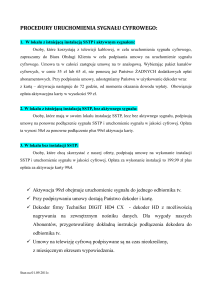
Zwykle rejestracja sygnału impulsowego jest realizowana w ten sposób, że wartość tego
sygnału w dowolnej chwili tk jest obliczana na podstawie długości ostatniego przedziału
międzyimpuslowego Ti poprzedzającego chwilę tk (rys. 2).
Rys. 2. Pomiar częstotliwości z ostatniego przedziału międzyimpulsowego
Fig. 2. Frequency measurement from last period
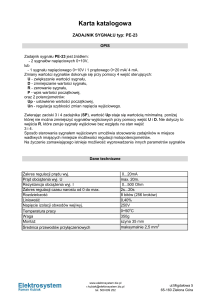
Jeżeli wartości mierzonego sygnału zmieniają się w czasie pomiaru, w wyniku czego
zmieniają się też odstępy czasu między impulsami, przy dłuższym okresie sygnału
impulsowego, a w rezultacie dłuższym czasie między zakończeniem okresu Ti i chwilą tk,
wartość uzyskana z pomiaru może odbiegać od wartości w chwili próbkowania (rys. 3) [7].
Dlatego lepszym rozwiązaniem jest wyznaczenie wartości częstotliwości z dwóch
sąsiednich przedziałów międzyimpulsowych, przy założeniu liniowej zmiany częstotliwości
oraz założeniu, że wartość częstotliwości fi uzyskana z pomiaru przedziału Ti jest równa
chwilowej wartości częstotliwości w środkowym punkcie tego przedziału [8].
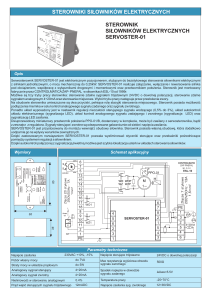
Jako wartość częstotliwości fk w chwili tk można przyjąć wartość wyznaczoną z dwóch
sąsiednich przedziałów międzyimpulsowych, przy założeniu że częstotliwość zmienia się
w czasie tych przedziałów liniowo. W zależności od położenia chwili tk przedziałami tymi są
Ti i Ti+1 lub Ti+1 i Ti+2 (rys. 4).
D. Świsulski
38
Rys. 3. Błąd dynamiczny Δdx przy rejestracji sygnału czestotliwościowego: x(tk) – wartość wielkości
mierzonej w chwili tk, xśr – średnia wartość wielkości mierzonej w przedziale
miedzyimpulsowym Ti
Fig. 3. Dynamic error Δdx in registration of pulse signal period: x(tk) – measured quantity in tk instant,
xśr – mean value of measured quantity in Ti time
a)
b)
Rys. 4. Pomiar częstotliwości na podstawie długości dwóch przedziałów międzyimpulsowych: a) Ti i
Ti+1, b) Ti+1 i Ti+2
Fig. 4. Frequency measurement from two periods: a) Ti i Ti+1, b) Ti+1 i Ti+2
Dla
i
i
j 1
j 1
T j t k T j 12 Ti1
i 1
i
T j
j 1
1T
2 i 1
obliczamy częstotliwość fk ze wzoru (1), natomiast dla
t k T j ze wzoru (2).
j 1
Parametry akwizycji w systemach…
39
i 1
T j 12 Ti
j 1
fk fi
i
i 1
T 1T T 1T
j
2 i 1 j
2 i
j 1
j 1
f i 1 f i t k
(1)
i 1
2 f i 1 f i t k T j 12 Ti
j 1
fi
Ti Ti 1
i
f i 1 t k T j 12 Ti 1
j 1
i 1
i
T 1T T 1T
j
2 i 2 j
2 i 1
j 1
j 1
f i 2
f k f i 1
(2)
2 f i 2 f i 1 t k T j 12 Ti 1
j 1
f i 1
Ti 1 Ti 2
i
Częstotliwość próbkowania jest określana przez okres czasu między chwilami
próbkowania tk i tk+1. Jednocześnie z pomiarem częstotliwości, w chwili tk są próbkowane
napięcia w torach z napięciowym nośnikiem informacji.
Przykłady realizacji przedstawionej metody są opisane w [8, 9].
3. ROZDZIELCZOŚĆ PRZETWARZANIA
Dokładność przetwarzania analogowo-cyfrowego jest określana przez liczbę bitów
przetwornika, a więc przez jego rozdzielczość.
Dla kanałów pomiarowych z częstotliwościowym nośnikiem informacji, ze względu na
wykorzystanie licznika jako przetwornika wielkości analogowej na cyfrową, rozdzielczość
zależy od pojemności licznika i czasu pomiaru. Dobierając odpowiedni czas bramkowania
przy zastosowaniu licznika o dużej pojemności, można w prosty sposób uzyskać przetwornik
o rozdzielczości 16 bitów lub większej, co przy przetwarzaniu napięcia może nastręczać
trudności.
W pomiarach rzeczywistych znaczący wpływ na dokładność przetwarzania ma poziom
szumów dodawanych do sygnału użytecznego. Dlatego wiarygodniejszą miarą dokładności
D. Świsulski
40
przetwarzania jest tzw. efektywna liczba bitów ENOB (ang. Effective Number of Bits),
określająca liczbę bitów sygnału cyfrowego powyżej poziomu szumu [10].
Jeżeli mierzony sygnał ma kształt sinusoidalny, to stosunek sygnału do szumu SNR dla
przetwornika o liczbie bitów równej B możemy obliczyć ze wzoru [11]:
SNR 1,5 2 2 B
(3)
Współczynnik SNR może być wyrażony w decybelach:
SNRdB 10 log 1,5 2 2 B 1,76 6,02 B [dB]
(4)
Po przekształceniu zależności (4) możemy uzyskać wzór na liczbę bitów, w funkcji
stosunku sygnału do szumu SNR:
B
SNR dB 1,76
6,02
(5)
W praktyce zamiast SNR wykorzystuje się współczynnik SINAD, jako stosunek sygnału
do szumu i zniekształceń (ang. Signal to Noise and Distortion Ratio).
Zależność (5) może być wykorzystana do pomiaru efektywnej liczby bitów w układzie
przedstawionym na rysunku 5 [12].
Rys. 5. Schemat blokowy systemu do pomiaru efektywnej liczby bitów
Fig. 5. Block diagram of system for measuring effective numbers of bits
Na wejście badanego przetwornika analogowo-cyfrowego A/D jest podawany sygnał
sinusoidalny u(t). Przetwornik jest taktowany sygnałem z generatora G o częstotliwości fs.
Ciąg liczb na wyjściu przetwornika jest zapamiętywany w buforze BUF. Na podstawie bloku
zapamiętanych próbek jest obliczane widmo częstotliwościowe sygnału wejściowego
przetwornika. Na podstawie tego widma jest wyznaczany stosunek sygnału do szumu
i zniekształceń SINAD, a z niego efektywna liczba bitów ENOB.
Klasyczna metoda rejestracji sygnałów impulsowych modulowanych częstotliwościowo,
polegająca na zliczaniu impulsów z generatora wzorcowego w czasie między impulsami
Parametry akwizycji w systemach…
41
sygnału zmodulowanego, ze względu na zmienny czas międzyimpulsowy (próbkowanie
nierównomierne) nie pozwala na obliczanie FFT, a w rezultacie na bezpośrednie wyznaczenie
efektywnej liczby bitów [12].
Takiego problemu nie ma przy zastosowaniu przedstawionej metody, w której mierzona
wartość jest odtwarzana na podstawie długości dwóch sąsiednich przedziałów
międzyimpulsowych. Założenie liniowej zmiany wielkości mierzonej jest źródłem
dodatkowych zniekształceń, w wyniku czego zmniejsza się wartość SINAD, a w rezultacie
efektywna liczba bitów ENOB. Jak przedstawiono w kolejnym punkcie, nie jest to wpływ
znaczący, a można go zmniejszyć przez odpowiedni dobór parametrów pomiaru.
4. PRZYKŁADOWA SYMULACJA
Jako przykład opracowano symulację pomiaru prędkości obrotowej układu napędowego.
Pierwsza metoda pomiaru prędkości polega na użyciu prądnicy tachometrycznej prądu stałego
( U t k t ), której napięcie jest przetwarzane na postać cyfrową w przetworniku
analogowo-cyfrowym.
Druga metoda pomiaru tej samej prędkości zakłada wykorzystanie przetwornika
obrotowo-impulsowego o Ce impulsach przy każdym obrocie [13], zliczaniu w odstępach
między impulsami z przetwornika obrotowo-impulsowego okresów sygnału z generatora
wzorcowego o częstotliwości fg i przeliczeniu otrzymanych wyników zgodnie ze wzorami (1)
i (2) w celu uzyskania wartości prędkości obrotowej w tych samych chwilach czasu co
z przetwornika analogowo-cyfrowego.
Położenie kolejnego impulsu ti z przetwornika obrotowo-impulsowego można wyznaczyć
jako czas od poprzedniego impulsu ti-1, z zależności na średnią prędkość między chwilami ti-1
i ti, która jest równa stosunkowi pokonanego w tym czasie kąta do tego czasu [14]. Tarcza
przetwornika obrotowo-impulsowego w czasie między dwoma impulsami obraca się o 1/Ce
obrotu. Stąd otrzymujemy równanie:
1
Ce
1
t dt
t i t i 1 t
t i t i 1
ti
(6)
i 1
Podstawiając w miejsce ω(t) funkcję, według której następuje zmiana prędkości
obrotowej, po przekształceniach otrzymujemy położenie impulsu ti.
Jeżeli mierzona prędkość zmienia się zgodnie z funkcją sinusoidalną:
t 0 m sin 2f p t
(7)
D. Świsulski
42
gdzie na stałą prędkość obrotową 0 są nałożone wahania prędkości o amplitudzie m
i częstotliwości fp, po przekształceniu zależności (6) i (7) otrzymujemy równanie:
0 t i 0 t i 1
m cos2f p t i 1 m cos2f p t i
2f p
2f p
1
0
Ce
(8)
Z równania (8) można wyznaczyć chwile, w których pojawią się impulsy na wyjściu
przetwornika obrotowo-impulsowego.
Zakładając położenie pierwszego impulsu w chwili t=0, z (8) wyznaczamy położenie
następnego impulsu ti, które przy kolejnym obliczeniu jest traktowane jako położenie
poprzednie ti-1 (rys. 6) [15].
Rys. 6. Algorytm obliczania położenia impulsów
Fig. 6. The algorithm for calculation the position of pulses
Załóżmy, że wartość składowej stałej prędkości obrotowej wynosi ω0 = 10 obr/s,
amplituda składowej przemiennej ωm = 2 obr/s i jej częstotliwość fp = 50 Hz.
Przy pomiarze prędkości obrotowej na podstawie sygnału z przetwornika obrotowoimpulsowego, przy wykorzystaniu opisanej metody, występują błędy wynikające z przyjętego
założenia liniowej zmiany wielkości mierzonej.
Na rysunkach 7 i 8 jest pokazana wartość błędu względnego δω w funkcji czasu, przy
założeniu że pomiar wykonywany za pomocą przetwornika obrotowo-impulsowego
o Ce = 500 impulsach przy pełnym obrocie, a częstotliwość generatora wzorcowego wynosi
fg = 10 i 20 MHz.
Parametry akwizycji w systemach…
43
Rys. 7. Błąd względny pomiaru prędkości δω w funkcji czasu dla fg = 10 MHz
Fig. 7. Relative error of velocity measurements δω in function of time for fg = 10 MHz
Rys. 8. Błąd względny pomiaru prędkości δω w funkcji czasu dla fg = 20 MHz
Fig. 8. Relative error of velocity measurements δω in function of time for fg = 20 MHz
Jak widać z wykresu, dla przykładowych parametrów pomiaru i fg = 10 MHz wartość
błędu mieści się w granicach δω = -0,05…+0,05%, natomiast przy fg = 20 MHz w granicach
δω = -0,02…+0,03%. Przedstawione zakłócenie powoduje zmniejszenie wartości efektywnej
liczby bitów.
Jednym z parametrów wpływających na jakość pomiaru w torze pomiarowym z sygnałem
częstotliwościowym jest częstotliwość fg sygnału generatora, którego okresy są zliczane
w odstępach międzyimpulsowych. Wpływ tej częstotliwości na stosunek sygnału do szumu
i zniekształceń SINAD oraz na efektywną liczbę bitów ENOB dla przykładowych
parametrów pomiaru jest przedstawiony w tabeli 1.
Jak wynika z przedstawionych wyników symulacji, zwiększanie częstotliwości fg pozwala
zwiększyć efektywną liczbę bitów tylko do pewnej granicy. Dalsze zwiększanie
częstotliwości, ze względu na zakłócenia wynikające z zastosowanej metody, nie poprawia
już wartości współczynnika ENOB.
D. Świsulski
44
Tabela 1
Wpływ częstotliwości generatora na stosunek sygnału do szumu
i zniekształceń SINAD i efektywną liczbę bitów ENOB
fg [MHz]
2
5
10
20
50
100
200
SINAD [dB]
45,9
52,8
59,1
64,6
69,0
72,5
72,5
ENOB [bit]
7,3
8,4
9,5
10,4
11,1
11,7
11,7
Wynika to z tego, że wpływ błędu kwantowania dla dużej wartości fg na całkowity błąd
pomiaru staje się pomijalny w porównaniu z błędem dynamicznym [4].
5. PODSUMOWANIE
Zaproponowana
metoda
przetwarzania
sygnału
w
torze
pomiarowym
z częstotliwościowym nośnikiem informacji pozwala na zintegrowanie kanałów
napięciowych i częstotliwościowych oraz wykonywanie pomiarów w obu typach kanałów
przy wykorzystaniu tych samych parametrów:
próbkowanie w tych samych chwilach czasu, z taką samą, stałą częstotliwością,
dokładność pomiarów opisana tym samych parametrem określającym efektywną liczbę
bitów.
BIBLIOGRAFIA
1. Jakubiec J., Roj J.: Pomiarowe przetwarzanie próbkujące. Wydawnictwo Politechniki
Śląskiej, Gliwice 2000.
2. Kirianaki N. V., Yurish S. Y., Shpak N. O., Denega V. P.: Data acquisition and signal
processing for smart sensors. John Wiley & Sons, Ltd, Baffins Lane 2002.
3. Jasik J. R.: Przetwarzanie sygnałów pomiarowych w systemach z częstotliwościowym
nośnikiem informacji. Wydawnictwo Politechniki Lubelskiej, Lublin 2003.
4. Świsulski D.: Cyfrowa rejestracja sygnałów impulsowych z częstotliwościowym
nośnikiem informacji. Wydawnictwo Politechniki Gdańskiej, Gdańsk 2006.
Parametry akwizycji w systemach…
45
5. Świsulski D., Wołoszyk M., Galewski M. T., Porzeziński M.: Rejestracja parametrów
pracy wiertnicy wytwarzającej pale betonowe. „Pomiary Automatyka Robotyka” 2004, nr
7-8, s. 91-94.
6. Świsulski D.: Przykłady cyfrowego przetwarzania sygnałów w LabVIEW. Wydawnictwo
Politechniki Gdańskiej, Gdańsk 2012.
7. Świsulski D.: Błąd dynamiczny w torze pomiarowym z częstotliwościowym nośnikiem
informacji. „Pomiary Automatyka Kontrola” 2000, nr 2, s. 2-6.
8. Świsulski D.: Wielokanałowa akwizycja z torami pomiarowymi z napięciowym i częstotliwościowym nośnikiem informacji. „Pomiary, Automatyka, Kontrola” 2006, nr 6,
s. 27-29.
9. Świsulski D.: Simultaneous conversion of measurement results from voltage and
frequency channels. “Nauczno - tieorieticzieskij i prakticzieskij żurnał Sowriemiennyj
naucznyj wiertnik” 2008, nr 9(35), s. 37-47.
10. IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters.
IEEE Standard 1241-2000. The Institute of Electrical and Electronics Engineers, Inc.,
New York 2000.
11. Schaefer A.: The Effective Number of Bits (ENOB) of my R&S Digital Oscilloscope.
Technical Paper. Rohde & Schwarz GmbH & Co., München 2011.
12. Pawłowski E.: Efektywna rozdzielczość przetwornika napięcie-częstotliwość w stanach
dynamicznych. „Pomiary Automatyka Kontrola” 2012, nr 11, s. 1294-1297.
13. Świsulski D.: Dobór okresu sygnału impulsowego przy cyfrowych pomiarach prędkości
obrotowej w warunkach dynamicznych. Zeszyty Naukowe Politechniki Gdańskiej, nr
583/2000, Elektryka 2000, nr 86, s. 149-158.
14. Świsulski D., Referowski L.: Simulation of incremental encoder signals. „Przegląd
Elektrotechniczny” 2009, R. 85, nr 6, s. 187-189.
15. Świsulski D.: Symulacja przetworników z wyjściowym sygnałem impulsowym
modulowanym częstotliwościowo. „Pomiary, Automatyka, Kontrola” 2011, nr 12,
s. 1528-1530.
Recenzent: Prof. dr hab. inż. Tadeusz Skubis
Wpłynęło do Redakcji dnia 30 października 2011 r.
_______________________________________
Dr hab. inż. Dariusz ŚWISULSKI, prof. PG
Politechnika Gdańska, Wydział Elektrotechniki i Automatyki
Katedra Metrologii i Systemów Informacyjnych
ul. Gabriela Narutowicza 11/12, 80-233 GDAŃSK
tel.: 058 347-13-97; e-mail.: [email protected] lub [email protected]