ĆWICZENIE 4
BADANIA ZABEZPIECZEŃ ODLEGŁOŚCIOWYCH
1.
PODSTAWY TEORETYCZNE
1.1. Wiadomości ogólne
Przekaźniki
odległościowe
są
stosowane
do
wykrywania
i
lokalizacji
zwarć
międzyfazowych i 1-faz przede wszystkim w sieciach przesyłowych i przesyłowo
rozdzielczych (linie o napięciu od 110 kV). Obecnie coraz częściej znajdują także zastosowanie
w ważnych liniach sieci średnich napięć do wykrywania zwarć międzyfazowych.
Działają one na zasadzie pomiaru odległości od miejsca ich zainstalowania do miejsca
zwarcia. Pomiar tej odległości odbywa się pośrednio – poprzez pomiar impedancji pętli
zwarcia.
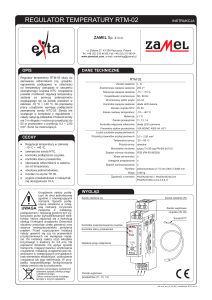
Selektywność działania zabezpieczeń odległościowych uzyskuje się poprzez uzależnienie
czasu działania od wyniku pomiaru impedancji. Dobrze ilustrują to charakterystyki czasowo
impedancyjne, pokazane na rys. 1, których parametry są nastawialne w przekaźniku.
A
C
B
Z
Z
Z
t
tIII
tII tI
Z
ZIA
ZIB
ZIIA
ZIIIA (Zr-zasięg członów
rozruchowych
Rys. 1. Charakterystyki czasowo- impedancyjne przekaźnika odległościowego: ZI, ZII, ZIII – strefy impedancyjne,
tI, tII, tIII – stopnie czasowe
Schodkowe charakterystyki czasowo-impedancyjne (t(Z)) otrzymuje się w wyniku
współdziałania członu czasowego przekaźnika odległościowego z jego członem pomiarowym.
Element pomiarowy dokonuje lokalizacji zwarcia przez porównanie impedancji zmierzonej Zm
1
z impedancją nastawioną ZI (ZII, ZIII). To porównanie może następować kilkukrotnie, zgodnie z
charakterystyką t(Z) zabezpieczenia. Bezpośrednio po wykryciu zwarcia następuje porównanie
Zm z ZI. Jeśli ZmZI, to następuje zadziałanie zabezpieczenia, w przeciwnym przypadku
następuje przełączenie zasięgu zabezpieczenia na ZII. Jeśli w chwili tII ZmZII, to następuje
zadziałanie zabezpieczenia, w przeciwnym przypadku następuje przełączenie zasięgu na ZIII
itd.
Czas własny (tI) współczesnych cyfrowych przekaźników odległościowych wynosi 20 do 40
ms, starszych przekaźników elektromechanicznych – do 100 ms. W zależności od wykonania,
przekaźnik odległościowy może mieć więcej lub mniej stref i stopni, zazwyczaj posiada tzw. I
strefę wydłużoną do współpracy z automatyką SPZ lub do współpracy z łączem w.cz. oraz tzw.
strefę wsteczną.
Przekaźnik
odległościowy może
posiadać
jeden
system
pomiarowy (przekaźnik
jednosystemowy) lub więcej (zwykle 3 lub 6) (przekaźnik wielosystemowy). W przekaźniku
jednosystemowym przed rozpoczęciem pomiaru konieczne jest dokonanie odpowiednich
przełączeń w obwodach wejściowych układu pomiarowego (1-faz). Musi on zostać włączany
na pomiar właściwych sygnałów po rozpoznaniu rodzaju zwarcia. Układ sześciosystemowy nie
wymaga takich przełączeń, bowiem poszczególne systemy pomiarowego kontrolują w sposób
ciągły wszystkie możliwe pętle zwarciowe, dzięki czemu takie przekaźniki odznaczają się
najkrótszymi czasami własnymi.
1.2. Budowa przekaźników odległościowych
1.2.1.
Opis ogólny
Przekaźnik odległościowy złożony jest z wielu elementów (układów funkcjonalnych), wśród
których można najczęściej wyróżnić:
a)
b)
c)
d)
e)
f)
g)
h)
i)
j)
k)
l)
układ rozruchowy,
układ pomiarowy,
układ kierunkowy,
układ czasowy,
układy logiczne,
układy sygnalizacji wewnętrznej i zewnętrznej,
układ wykonawczy
blok nastawczy,
przetworniki wielkości pomiarowych,
układ SPZ,
układ blokady od kołysań mocy,
układ sprzężenia z łączem w.cz.
W rozwiązaniach mikroprocesorowych mogą ponadto występować:
2
układy samotestowania,
układy rejestracji sygnałów zakłóceniowych,
lokalizator miejsca zwarcia,
układ sprzęgający do komunikacji światłowodowej i inne
S
W
UE
UR
UQ
PI
ULWI
PU
ULWU
UM
T+B
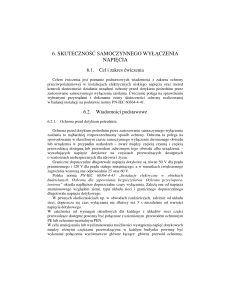
Rys. 2. Uproszczony schemat blokowy jednosystemowego przekaźnika odległościowego; PI, PU – przetworniki
wielkości pomiarowych prądu i napięcia, UR – układ rozruchowy (nadprądowy lub podimpedancyjny), ULWI,
ULWU – układy logiczno-wybierające, T+B – układ czasowy z blokiem nastawczym (napięcia i stref omowych),
UQ – człon kierunkowy, UM – układ mierzący, UE – układ wykonawczy
Na rys. 2 pokazano uproszczony schemat blokowy przekaźnika odległościowego z
uwzględnieniem podstawowych jego elementów i funkcjonalnymi powiązaniami pomiędzy
nimi.
Z chwilą wystąpienia zwarcia w linii, pojawiający się prąd zwarciowy i obniżone napięcie
faz zwartych powodują pobudzenie się układów rozruchowych (UR) odpowiednich faz.
Działają one bezzwłocznie na układy logiczno-wybierające (ULWI, ULWU) powodując za ich
pośrednictwem wybór odpowiednich wielkości napięcia i prądu dla układu pomiarowego (UM)
i kierunkowego (UQ) oraz uruchamiają człon czasowy (T+B), który w miarę upływu czasu
włącza kolejne strefy pomiarowe. Po stwierdzeniu zwarcia w odpowiedniej strefie następuje
wzbudzenie układu wykonawczego (UE), który wysyła sygnał na wyłączenie linii i uruchamia
sygnalizację o zadziałaniu przekaźnika. W przypadku zwarcia z tyłu („za plecami
przekaźnika”) następuje zablokowanie przekaźnika przez układ kierunkowy (UQ).
3
1.2.2.
Układ rozruchowy
Układy rozruchowe mogą być w wykonaniu nadprądowym (sieci średnich napięć) lub
podimpedancyjnym (sieci przesyłowe i przesyłowo-rozdzielcze). Kryterium prądowe w
sieciach przesyłowych i przesyłowo-rozdzielczych nie może stanowić podstawy wykrywania
zwarć z tego powodu, że minimalny prąd zwarciowy często niewiele się różni od
maksymalnego prądu obciążenia linii. Układy rozruchowe nadprądowe stosuje się wyłącznie w
przekaźnikach odległościowych przeznaczonych dla sieci średniego napięcia, w których
kryterium prądowe jest wystarczające do wykrycia zwarcia. Nastawia się je identycznie jak
zabezpieczenia nadprądowo zwłoczne.
Układy rozruchowe powinny spełniać następujące podstawowe wymagania:
- powinny pewnie działać podczas zwarć w dowolnym miejscu chronionej linii a także
podczas zwarć w następnych odcinkach linii,
- nie powinny się pobudzać wskutek ruchowych przeciążeń linii,
- w przekaźnikach jednosystemowych powinny bezbłędnie wykrywać rodzaj zwarcia.
Podimpedancyjne układy rozruchowe są mniej dokładne niż układy mierzące przekaźnika
odległościowego i stale mierzą impedancję linii. W przekaźnikach jednosystemowych układ
rozruchowy zawiera trzy elementy podimpedancyjne (po jednym na każdą fazę), które są
uzupełnione elementem zerowo-prądowym. Elementy podimpedancyjne są zwykle włączane
na napięcia międzyprzewodowe i prądy fazowe. Podczas zwarć z udziałem ziemi element
zerowo-prądowy powoduje przełączenie elementów podimpedancyjnych na pomiar napięć
fazowych.
Charakterystyki pomiarowe podimpedancyjnego układu rozruchowego, jak i układu
mierzącego przekaźnika odległościowego są przedstawiane na płaszczyźnie zespolonej
impedancji. Są to krzywe ograniczające obszar działania danego układu.
Charakterystyka pomiarowa podimpedancyjnego układu rozruchowego powinna mieć taki
kształt i usytuowanie na płaszczyźnie impedancji, aby z odpowiednim zapasem obejmowała
odcinek impedancji zwarciowej linii ZAB i jednocześnie nie wchodziła w niedozwolony obszar
impedancji roboczych linii Zrob.
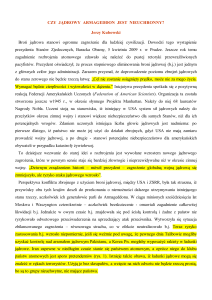
Na rys. 3 pokazano kilka typowych charakterystyk pomiarowych układu rozruchowego z
uwzględnieniem obszarów niedozwolonych (zakreskowanego) odpowiadających możliwym
położeniom wektora impedancji roboczej linii. Zasięg charakterystyki pomiarowej w kierunku
impedancji roboczych linii nie może przekraczać wartości impedancji faz zdrowych linii
4
podczas zwarć jednofazowych, przy uwzględnieniu nałożenia się na prąd obciążenia tych faz
tzw. prądu wyrównawczego Iw, pojawiającego się w tych fazach w wyniku zwarcia, co wyraża
nierówność (1):
Zr
U rob. min
3 I rob. max I w
(1)
gdzie Urob.min – minimalna wartość napięcia faz zdrowych podczas bliskich zwarć
jednofazowych (może osiągać wartość 0.85Urob przed wystąpieniem zwarcia),
a)
b)
Zl
Zl
jX
Zr
B
c)
jX
A
R
Zr
Zrob
jX
A
B
Zk
R
Zrob
d)
Zl
jX
Zl
B
B
A
R
R
A
Zrob
Zrob
Rys. 3. Typowe charakterystyki pomiarowe układu rozruchowego przekaźnika odległościowego dla linii o
długości: a) poniżej100 km) , b) ok. 100 km, c), d) powyżej 100 km
1.2.3.
Układ mierzący
Charakterystyka pomiarowa układu mierzącego powinna być tak ukształtowana, aby na
poprawność lokalizacji zwarcia nie miały wpływu różne czynniki fałszujące pomiar odległości
do miejsca zwarcia, wśród których istotną rolę odgrywa rezystancja przejścia Rp w miejscu
zwarcia. Składa się na nią najczęściej rezystancja łuku i rezystancja uziemienia konstrukcji
słupa linii podczas zwarć z ziemią w linii. Jest to rezystancja nieliniowa, zależna od wartości
prądu zwarciowego i zawiera się w przedziale wartości od ułamka do kilku omów. Podczas
zwarć dodaje się ona do impedancji pętli zwarcia i przez to impedancja zmierzona przestaje
5
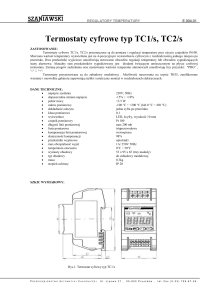
być proporcjonalna do odległości do miejsca zwarcia. Rys. 4 ilustruje wpływ rezystancji
przejścia Rp na wynik pomiaru impedancji Zm.
ZAB
jX
A
Rp
ZAK
B
Z
B
K
Zm>ZAK
K
ZAK
ZAB
R
A
Rys. 4. Impedancja mierzona (Zm) podczas zwarć rezystancyjnych
Wpływ rezystancji przejścia na dokładność lokalizacji miejsca zwarcia można zredukować
poprzez wybór odpowiedniej charakterystyki pomiarowej o rozszerzonym zasięgu w kierunku
osi R.
Typowe charakterystyki pomiarowe przekaźników odległościowych pokazano na rys. 4.
jX
a)
Zm
jX
b)
c)
Zm
Zm
R
jX
R
R
d)
jX
e)
Zm
jX
Zm
R
R
Rys. 4. Typowe charakterystyki pomiarowe przekaźników odległościowych; a) charakterystyka kołowa
(pełnoimpedancyjna), b) charakterystyka admitancyjna (mho), c) charakterystyka eliptyczna, d) charakterystyka
czworokątna, e) charakterystyka reaktancyjna.
6
Spośród pokazanych na rys. 4 charakterystyk najlepiej eliminują wpływ rezystancji przejścia
charakterystyki czworokątne i reaktancyjne.
Aby wynik pomiaru nie zależał od rodzaju zwarcia, do układu pomiarowego zabezpieczenia
odległościowego należy doprowadzić takie wielkości napięcia i prądu zwarciowego, aby w
wyniku pomiaru otrzymać wartość impedancji dla składowej zgodnej (Zm=Z1). To będzie
spełnione, jeśli podczas zwarć międzyfazowych izolowanych doprowadzi się do tego elementu
napięcia międzyfazowe i prądy faz zwartych, natomiast podczas zwarć z udziałem ziemi –
napięcia fazowe i prąd fazy zwartej wraz z odpowiednią częścią prądu ziemnozwarciowego.
1.2.4.
Człon kierunkowy
Zadaniem członu kierunkowego jest blokowanie działania w przypadku wystąpienia zwarcia
„za plecami” przekaźnika odległościowego, tj. wtedy, gdy moc zwarciowa przepływa w
kierunku od linii do szyn zbiorczych stacji, w której zainstalowany jest przekaźnik. Człon ten
jest potrzeby w zabezpieczeniach, w których charakterystyka pomiarowa nie posiada własności
kierunkowych (np. charakterystyka pełnoimpedancyjna – rys. 4a).
a)
b)
jX
ZI
A
B
(3)
K1
C
R
Z
K1
K2
K2
ZI
(2)
(1)
Rys. 5. Rysunek wyjaśniający rolę członu kierunkowego w zabezpieczeniu odległościowym; a) – schemat
fragmentu sieci (Z-przekaźnik odległościowy chroniący odcinek linii BC; K1, K2 - założone miejsca zwarcia), b)
charakterystyki rozruchowe zabezpieczenia ((1)- charakterystyka członu pomiarowego przekaźnika
odległościowego, (2) – charakterystyka członu kierunkowego, (3) – obszar działania zabezpieczenia)
Rolę członu kierunkowego w zabezpieczeniu odległościowym posiadającym przykładowo
charakterystykę
rozruchową
pełnoimpedancyjną
wyjaśnia
rys.
5.
Zabezpieczenie
odległościowe zainstalowane w stacji B (rys. 5a) powinno reagować na zwarcia w linii
chronionej, czyli na zwarcia występujące na odcinku BC (np. zwarcie w p. K1). Zwarcia takie
są „widziane” przez to zabezpieczenie w pierwszej ćwiartce płaszczyzny impedancji zespolonej
7
(np. p. K1 na rys. 5b), wektor impedancji zmierzonej odpowiadający powyższemu miejscu
zwarcia leży wewnątrz charakterystyki rozruchowej (1) zabezpieczenia, zatem ono zadziała.
Jednak wewnątrz tej charakterystyki, lecz w trzeciej ćwiartce, może się także znaleźć wektor
impedancji zmierzonej w przypadku zwarcia w linii AB (np. w p.K2), co doprowadzi do
zbędnego zadziałania zabezpieczenia. Jak widać, celem zapewnienia selektywności działania
zabezpieczenia konieczne jest ograniczenie obszaru jego działania do tej części płaszczyzny
impedancji zespolonej, która odpowiada zwarciom w chronionej linii (obszar (3) na rys. 5b).
Można to łatwo uzyskać dzięki współpracy członu pomiarowego zabezpieczenia z członem
kierunkowym posiadającym np. charakterystykę rozruchową (2) pokazaną na rys. 5b. Człon
kierunkowy blokuje działanie zabezpieczenia odległościowego w przypadku, gdy wektor
impedancji zmierzonej znajdzie się w obszarze położonym poniżej jego charakterystyki
rozruchowej (2).
1.2.5.
Człon czasowy
Człon
czasowy
zapewnia
podczas
zwarcia
przełączanie
zakresu
pomiarowego
zabezpieczenia ZI, ZII, ZIII zgodnie z nastawionymi czasami tI, tII, tIII (patrz rys. 1) dobranymi
według zasady stopniowania czasów. Czas stopniowania t przyjmuje się w zakresie (0.30.5)s.
2.
BADANIE ELEKTROMECHANICZNEGO PRZEKAŹNIKA
ODLEGŁOŚCIOWEGO TYPU R1KZ4
2.1. Opis przekaźnika typu R1KZ4
Przekaźnik typu R1KZ4 firmy Siemens jest przewidziany dla sieci średnich napięć
kompensowanych lub pracujących z izolowanym punktem neutralnym. Przekaźnik posiada
nadmiarowo-prądowe człony rozruchowe. W impedancyjnym członie pomiarowym możliwy
jest wybór charakterystyki rozruchowej: impedancyjnej, konduktancyjnej lub mieszanej,
przekaźnik nadaje się zatem zarówno dla linii napowietrznych, jak i kablowych.
Widok przekaźnika R1KZ4 przedstawiono na rys. 6 a na rys. 7 – uproszczony schemat
blokowy tego przekaźnika.
8
Rys. 6. Widok przekaźnika typu R1KZ4 firmy Siemens
Zasada współdziałania elementów przekaźnika podczas zwarcia
W zależności od rodzaju zwarcia w linii, pobudzają się odpowiednie nadprądowe człony
rozruchowe IR lub IT (rys. 7), które uruchamiają człon czasowy T i pobudzają przekaźniki
pomocnicze w układzie logiczno przełączającym ULWU. Układ ten dokonuje odpowiednich
przełączeń w pomiarowych obwodach napięciowych i prądowych po stronie wtórnej
transformatorów pośredniczących, wybierając napięcie i prąd odpowiednich faz (stosownie do
rodzaju zwarcia) do członu pomiarowego UM i kierunkowego UQ. Jednocześnie człon
czasowy steruje w odpowiednich momentach przełączaniem zakresu członu pomiarowego
zgodnie z nastawieniami stref czasowo-omowych.
9
S
W
UE
L1 L2 L3
UQ
CT
UM
IR
IT
IM
T+B
VT
ULWU
Rys. 7. Uproszczony schemat blokowy przekaźnika R1KZ4; IR, IT, IM – człony rozruchowe, UM – człon
pomiarowy, UQ – człon kierunkowy, T + B – człon czasowy z blokiem nastawczym,
ULWU – układ logiczno wybierający, UE – przekaźnik wykonawczy
Człon kierunkowy pracuje z wybiórczością wstępną, to znaczy w stanie spoczynku zestyk
jego jest zamknięty, zezwalając na wyłączenie. Podobnie zestyk członu pomiarowego ma
również wybiórczość wstępną, a z chwilą podania do układu pomiarowego prądu i napięcia
pozostaje w tym położeniu, jeśli zwarcie leży w strefie I lub otwiera się, gdy zwarcie leży poza
tą strefą. Zamyka się on dopiero po czasie odpowiadającym strefie, w której znajduje się
zwarcie.
Gdy moc zwarciowa przepływa w kierunku od szyn zbiorczych do linii, a zestyk członu
pomiarowego zamknął się, wówczas zostaje pobudzony przekaźnik wykonawczy UE, który
wysyła impuls wyłączający wyłącznik linii.
Należy zaznaczyć, że przekaźnik R1KZ4 nie wymaga zasilania z zewnętrznego źródła
napięcia pomocniczego. Napięcie to – niezbędne do zasilania obwodów pomocniczych
przekaźnika, jest wytwarzane w przekaźniku przez specjalne transformatorni nasyceniowe
zasilane prądem wtórnym przekładników prądowych. Pojawia się więc ono tylko podczas
trwania zwarcia. Po wyłączeniu linii znika prąd zwarciowy, a z nim także napięcie pomocnicze
na zaciskach transformatorów nasyceniowych, w związku z czym odwzbudzają się wszystkie
człony i przekaźnik wraca do pozycji spoczynkowej.
Jeśli podczas zwarcia moc zwarciowa przepływa w kierunku do szyn zbiorczych, to
wyłączenie linii nie nastąpi, gdyż wtedy blokuje człon kierunkowy UQ. W takim przypadku
wyłączenie może nastąpić jedynie z czasem końcowym (tv).
10
W przypadku zwarć wielobiegunowych do członu pomiarowego UM i kierunkowego UQ
doprowadzane jest napięcie skojarzone zwartych faz oraz prąd jednej z nich (np. przy zwarciu
L1-L2: UL12 oraz IL1). Podczas zwarć podwójnych z ziemią pobudza się dodatkowo (poza
członami IR lub IT) nadmiarowo-prądowy, nienastawialny człon rozruchowy ziemnozwarciowy
IM, który przełącza człony UM i UQ na wielkości fazowe (np. przy zwarciu L1-L2 przez
ziemię: UL1 oraz (IL1 + 3kI0)/2, przy czym k=1/3(X0/X1-1) – współczynnik kompensacji
prądowej).
Podstawowe dane techniczne przekaźnika R1KZ4
Napięcie znamionowe
Prąd znamionowy
Zakres członów rozruchowych IR, IT
Prąd pobudzenia członu rozruchowego IM
Czas własny przekaźnika
Czułość kierunkowa
Minimalna wartość nastawienia strefy I
Maksymalna wartość nastawienia strefy III
Kąt przesunięcia wewnętrznego członu kierunkowego
- 100 V,
- 5 A,
- 5 10 A,
- 5 A,
- 0.08 0.1 s,
- 1% Un przy I=5A,
- 2ZI = 0.1 ,
- 2ZI = 203 .
- (40 50)0 ind
2.2. Nastawianie przekaźnika typu R1KZ4
Odpowiednią charakterystykę rozruchową przekaźnika wybiera się w zależności od kąta
impedancji zabezpieczanej linii. Uzyskuje się to dzięki zmianie pozycji nakładek mostków
znajdujących się w lewym dolnym rogu przekaźnika.
Zasięg poszczególnych stref impedancyjnych jest nastawiany opornikiem przez dobór
odpowiednich wartości r i wybór odpowiedniego zaczepu c transformatora pomocniczego. Do
zacisków dolnych przekaźnika są przyłączone opory nastawcze według systemu dualnego.
Wartości tych oporów są wypisane na płycie czołowej przekaźnika. Pierwsza grupa oporów,
oznaczona przez rI służy do nastawienia zasięgu pierwszej strefy. Podobnie grupy oporów rII i
rIII służą do nastawienia drugiej i trzeciej strefy. Przez odpowiedni wybór i zwarcie części
zacisków można dokładnie nastawić żądaną długość strefy. Wybór odpowiedniego
współczynnika c pozwala na zmniejszenie lub rozszerzenie zakresu nastawień.
Mając określone dla danego przekaźnika pierwotne impedancje poszczególnych stref X I, RI,
XII, RII, itd., oblicza się wartości rI, RII, itd., które nastawia się w przekaźniku, zgodnie z
zależnościami:
a) podczas pracy przekaźnika w układzie pomiaru impedancji
11
r
2 i
c u
R2 X 2
(2)
b) podczas pracy przekaźnika w układzie pomiaru impedancji mieszanej
r
2 i
1.05 X
c u
(3)
c) podczas pracy przekaźnika w układzie pomiaru konduktancji
r
1 i
X2
(R
)
c u
R
(4)
gdzie: i, u – przekładnia przekładników prądowych i napięciowych zasilających przekaźnik.
2.3. Układ pomiarowy do laboratoryjnego badania przekaźnika typu R1KZ4
Schemat ideowy układu pomiarowego do badania przekaźnika R1KZ4 przedstawiono na
rys. 8. Przyłączenie obwodów prądowych i napięciowych do zacisków przekaźnika odpowiada
na tym rysunku przypadkowi zwarcia dwufazowego A-B (L1-L2). W obwodzie prądowym, za
pomocą autotransformatora AT1, nastawia się żądaną wartość prądu I, zaś w obwodzie
napięciowym, za pośrednictwem autotransformatora AT2, nastawia się wartość napięcia U AB
(UL12) odpowiadającą napięciu pętli zwarciowej. Przesuwnik fazowy PF w obwodzie
napięciowym służy do nastawiania żądanej wartości kąta fazowego pomiędzy prądem I a
napięciem UAB. Watomierz W służy do ustalenia zerowego położenia przesuwnika fazowego.
W pokazanym układzie pomiarowym można wyznaczyć charakterystyki przekaźnika dla
dowolnego rodzaju zwarcia. Niezbędne jest tylko odpowiednie przyłączenie do zacisków
przekaźnika obwodów zasilających – prądowego i napięciowego.
12
S
1 2 3 4
R1KZ4
1 2
AT1
A
…
6 7
…
19 20
W
W1
W2
AT2
PF
V
Rys. 8. Schemat ideowy układu pomiarowego do badania przekaźnika R1KZ4; A – amperomierz, V, woltomierz, W
– watomierz, W1, W2, wyłączniki, S – sekundomierz, AT1, AT2, autotransformatory, PF – przesuwnik fazowy
2.4. Pomiar charakterystyki kołowej członu mierzącego przekaźnika R1KZ4
Przed przystąpieniem do pomiarów należy obliczyć nastawienia badanego przekaźnika na
podstawie następujących danych:
a) reaktancji i rezystancji zabezpieczanej linii,
b) przekładni przekładników prądowych i napięciowych linii,
c) zasięgu I, II i III strefy,
d) wartości czasów opóźnienia w poszczególnych strefach,
które poda prowadzący.
Na podstawie wymienionych danych należy:
a) wybrać właściwą charakterystykę członu pomiarowego,
b) obliczyć nastawienia przekaźnika zgodnie z wytycznymi zawartymi w podrozdziale 2.2.
Charakterystykę kołową członu pomiarowego wyznacza się dla strefy I. W tym celu należy
zestyk ślizgowy członu czasowego tI nastawić na zero, zaś wszystkie pozostałe na t = . Na
bloku nastawczym nastawia się wartości r poszczególnych stref, zgodnie z wynikami obliczeń.
13
Sposób wykonania pomiarów
W pierwszej kolejności należy wyskalować przesuwnik fazowy PF. Za pomocą
autotransformatora AT1 nastawia się w obwodzie prądowym prąd o wartości I = 2In,
autotransformatorem AT2 zaś nastawia się napięcie UAB równe połowie napięcia
znamionowego. Zmieniając położenie wirnika przesuwnika fazowego doprowadza się
wskazania watomierza W do zera. Oznacza to, że przesunięcie między wektorami I oraz UAB
wynosi /2. Poprzez zwarcie uzwojenia prądowego watomierza sprawdza się ponadto, czy
przesunięcie to jest charakteru indukcyjnego (wychylenie wskazówki w lewo), czy
pojemnościowego.
Następnie przystępuje się do wyznaczania kolejnych punktów charakterystyki Zm=f(). Przy
napięciu UAB=0.5Un włącza się wyłącznik W1, nastawiając w obwodzie prądowym prąd o
wartości 2In, którą utrzymuje się stałą przez cały czas pomiarów. Pomiary rozpoczyna się przy
kącie = 00, a następnie przy kątach pojemnościowych i indukcyjnych, które zmieniamy co
100. Następnie autotransformatorem AT2 obniża się płynnie napięcie UAB aż do zadziałania
przekaźnika. Wartość napięcia UrAB, przy której przekaźnik zadziałał, notuje się w tabeli 1.
Tabela 1. Wyniki pomiarów charakterystyki kołowej członu pomiarowego
Przekaźnik odległościowy:
In = ……………
Typ…………….
Un = ………….
Nr fabr……………………….
Lp
I
Ur
Zr
Uwagi
-
A
10
V
-
1
2
3
Na podstawie wyników pomiarów wykreśla się charakterystykę Zr = f(), przy czym Zr
określa się z zależności (5):
U rAB
(5)
2I
Dla porównania należy na tym samym rysunku wykreślić charakterystykę teoretyczną.
Zr
2.5. Pomiar charakterystyki impedancyjno-czasowej t=f(Z)
Przed przystąpieniem do pomiarów należy:
14
a) nastawić człon czasowy T zgodnie z podanymi wartościami opóźnień dla
poszczególnych stref,
b) ustawić na przesuwniku fazowym kąt równy kątowi impedancji linii,
c) w obwodzie prądowym nastawić prąd o wartości I = 2In, który utrzymuje się stały
podczas wszystkich pomiarów.
Pomiary rozpoczyna się od UAB = 0. Włączając wyłącznik W1 wywołuje się w obwodzie
prądowym przepływ prądu i tym samym zadziałanie przekaźnika. Czas działania przekaźnika
mierzy sekundomierz S.
Następne pomiary wykonuje się w ten sam sposób przy różnych wartościach napięcia UAB,
które zwiększa się co 5 V. Dla każdego napięcia pomiar wykonuje się trzykrotnie w celu
uzyskania średniego czasu działania przekaźnika tśr. Punkty pomiarowe zagęszcza się przy
przechodzeniu z jednej strefy do drugiej. Wyniki pomiarów notuje się w tabeli 2.
Tabela 21. Wyniki pomiarów charakterystyki impedancyjno-czasowej
Przekaźnik odległościowy:
Typ…………. Nr fabr…………..
Lp
In = …………..
I
U
Zm
3t
tśr
A
V
s
s
1
2
3
4
Un = ……………..
Nastawienia
Strefa
X
I
II
III
IV
t
s
Podczas trwania pomiarów kontroluje się wartość prądu I = 2In = const. Na podstawie
wyników pomiarów sporządza się wykres tśr = f(Zm), przy czym Zm oblicza się z zależności (5).
Dla porównania wykreśla się również charakterystykę teoretyczną (nastawioną) t = f(Zm).
15