PRACE iNSTYTUTU LOTNiCTWA
219, s. 269-279, Warszawa 2011
ANALiZA OBLiCZENiOWA WŁASNOŚCi AERODYNAMiCZNYCH
WiRNiKA NOŚNEGO WiATRAKOWCA W STANiE LOTU
USTALONEGO (AUTOROTACJi)
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
Instytut Lotnictwa
Streszczenie
W pracy przedstawiono wyniki symulacji komputerowych pracy wirnika nośnego wiatrakowca
w stanie poziomego lotu ustalonego w pełnym zakresie prędkości przelotowych bez wpływu ziemi.
W takich warunkach lotu swobodnie obracający się wirnik pracuje stale w stanie autorotacji. W wyniku
przeprowadzonych obliczeń wyznaczono charakterystyki aerodynamiczne oraz obciążenia i wahania łopat wirnika. Omówiono metodykę obliczeń, przedstawiono przykładowe wizualizacje oraz
dokonano jakościowej oceny przepływu wokół łopat wirnika pod kątem występowania niekorzystnych zjawisk aerodynamicznych.
SPIS OzNaczeń
V
M
MDD
MBUF
Lift
Drag
Side Force
OMEGA
R
TETA0
ALFA
CL
Ψ
– prędkość lotu
– liczba Macha
– liczba Macha wzrostu oporu
– liczba Macha początku buffetu
– siła nośna wirnika nośnego
– siła oporu wirnika nośnego
– siła boczna wirnika nośnego
– prędkość obrotowa wirnika nośnego
– odległość od osi obrotu wirnika
– skok ogólny łopat wirnika
– kąt natarcia wirnika
– współczynnik siły nośnej
– położenie kątowe łopaty w płaszczyźnie wirnika
1. WStĘP
Obiektem badań był dwułopatowy wirnik nośny wiatrakowca przedstawiony na rysunku 1.
Jest to klasyczny wirnik nośny wiatrakowca, który umożliwia jedynie start typu samolotowego
z rozbiegiem. konstrukcja głowicy nie pozwala na zmianę kąta skoku ogólnego łopat w czasie
270
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
pracy wirnika. łopata wirnika zbudowana została na bazie profilu Naca9H12MOD [1], [2] i ma
stały przekrój poprzeczny wzdłuż promienia. Wirnik jest zamocowany w głowicy wahliwie.
Rys. 1. Wirnik nośny wiatrakowca z głowicą
W czasie lotu wirnik wiatrakowca nie jest napędzany przez silnik i obraca się swobodnie na zasadzie zjawiska autorotacji pod wpływem przepływającego przez płaszczyznę wirnika powietrza. Wirnik obracając się wytwarza siłę ciągu. z punktu widzenia mechaniki lotu analizuje się
trzy składowe wektora siły ciągu:
• siłę nośną (Lift) – składową leżącą w płaszczyźnie pionowej i prostopadłą do kierunku lotu,
• siłę oporu (Drag) – składową w kierunku lotu,
• siłę boczną (Side Force) – składową prostopadłą do wektorów siły ciągu i siły nośnej.
Przy określonej prędkości lotu siła ciągu generowana przez wirnik zależy od:
• kąta natarcia wirnika (ALFA) – kąta pomiędzy kierunkiem lotu i płaszczyzną prostopadłą do
osi obrotu wirnika,
• skoku łopaty wirnika (TETA0),
• prędkości obrotowej wirnika (OMEGA).
Wartość skoku łopaty wirnika jest ustalona i nie może być zmieniana w czasie lotu. Prędkość
obrotowa wirnika jest wartością wynikową zależną od charakterystyk masowych, strukturalnych, geometrycznych i aerodynamicznych wirnika. kąt natarcia wirnika może być zmieniany
w czasie lotu przez pilota. W ustalonych warunkach lotu poziomego pilot tak dobiera kąt natarcia wirnika aby siła nośna generowana przez wirnik równoważyła ciężar wiatrakowca (przy
założeniu, że pozostałe komponenty wiatrakowca generują znikomą siłę nośną). Prędkość pozioma jest uzyskiwana dzięki sile ciągu śmigła, która musi równoważyć siły oporu wirnika oraz
pozostałych elementów wiatrakowca (kadłuba, usterzenia, podwozia, itp.).
celem pracy było wykonanie numerycznych symulacji lotu wirnika nośnego wiatrakowca
w szerokim zakresie prędkości przelotowych. Wykonane obliczenia miały dostarczyć informacji w zakresie:
• spodziewanych wartości sił działających na swobodnie obracający się wirnik,
• doboru możliwie optymalnych parametrów pracy wirnika.
założono, że w ramach obliczeń będą poszukiwane parametry pracy wirnika zapewniające
równowagę sił pionowych: siły nośnej wirnika i ciężaru wiatrakowca. założono także zakres
prędkości przelotowych w granicach od 50 km/h do 280 km/h oraz dwa warianty kąta skoku
ogólnego łopat wirnika: 2 lub 4 stopnie.
Przyjęto, że dla warunków równowagi pionowej, wyznaczone zostaną w funkcji prędkości
lotu poziomego takie parametry jak:
• kąt natarcia wirnika,
• prędkość obrotowa wirnika,
aNalIza OblIczeNIOWa WłaSNOścI aeRODyNaMIczNycH WIRNIka NOśNegO WIatRakOWca...
•
•
•
•
•
271
siła ciągu wirnika,
siła oporu wirnika,
siła boczna wirnika,
kąty wahań łopat wirnika,
globalne obciążenia łopat wirnika.
2. MetODyka OblIczeń
W ramach pracy analizowany był przepływ wokół izolowanego wirnika wiatrakowca, bez
uwzględnienia kadłuba, usterzenia, śmigła, itp. Uproszczenie to wynikało z faktu, że na wczesnym etapie projektu geometria tych elementów oraz ich umiejscowienie względem wirnika nie
zostały jeszcze ostatecznie określone. Ponadto ze względu na specyfikę lotu wydaje się, że
wpływ tych elementów wiatrakowca na pracę wirnika jest niewielki. charakterystyki aerodynamiczne wirnika pracującego w warunkach przelotowych wyznaczono za pomocą programu
Fluent [3] z modułem Virtual blade Model (VbM) [4]. Program Fluent umożliwia rozwiązanie
opisujących przepływ równań Naviera-Stokesa metodą objętości skończonych. Moduł VbM jest
przeznaczony do uproszczonego modelowania efektów przepływowych generowanych przez
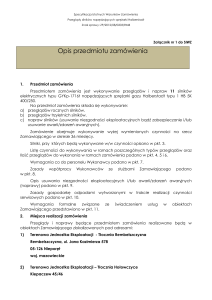
obracające się układy powierzchni nośnych (wirniki, śmigła, itp.). W takim podejściu rzeczywisty wirnik zastąpiony jest dyskiem – strefą komórek siatki obliczeniowej, w których umieszczone są źródła pędu (rysunek 2).
Rys. 2. Wirnik rzeczywisty i jego wirtualny odpowiednik w postaci strefy
heksahedralnych komórek obliczeniowych
Natężenie tych źródeł wyznacza się w oparciu o teorię elementu łopaty, wykorzystując bazę
dwuwymiarowych charakterystyk aerodynamicznych profili łopat wirnika. Dla potrzeb realizacji postawionych zadań oryginalny moduł VbM został rozbudowany, poprzez opracowanie
i implementację nowych procedur:
• wyznaczających kąty wahań łopat wirnika wahliwego,
• symulujących pracę wirnika w warunkach autorotacji,
• obliczających obciążenia łopat wirnika.
Wykorzystując opisane oprogramowanie, wykonano ciąg obliczeniowych symulacji
przepływu przez swobodnie obracający się wirnik dla różnych prędkości lotu. Obliczenia wykonano przy założeniu, że łopaty wirnika są idealnie sztywne i nie odkształcają się pod wpływem
sił aerodynamicznych.
3. WyNIkI OblIczeń
W założonym zakresie prędkości przelotowych wykonano obliczenia dla prędkości lotu
wynoszących: 50, 75, 100, 125, 150, 180, 200, 240, 280 km/h dla dwóch przyjętych wartości
272
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
skoku ogólnego łopat wirnika TETA0 wynoszących odpowiednio 2 i 4 stopnie. Dla tych wartości
poszukiwano takiego kąta natarcia wirnika ALFA aby uzyskać siłę ciągu wirnika nośnego (Lift)
równoważącą ciężar wiatrakowca.
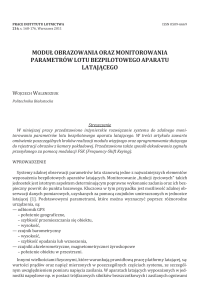
3.1. Charakterystyki aerodynamiczne
Poniżej przedstawiono w formie wykresów uzyskane z obliczeń przebiegi zależności zmiany kąta natarcia wirnika (ALFA) oraz prędkości obrotowej autorotacji (OMEGA) w funkcji
prędkości lotu (V) dla siły ciągu (Lift) równoważącej ciężar wiatrakowca.
Rys. 3. kąt natarcia wirnika (ALFA) w funkcji prędkości lotu dla dwóch wartości skoku
ogólnego łopat wirnika i dla stałej siły nośnej wirnika
Rys. 4. Prędkość obrotowa autorotacji (OMEGA) w funkcji prędkości lotu dla dwóch
wartości skoku ogólnego łopat wirnika i dla stałej siły nośnej wirnika
aNalIza OblIczeNIOWa WłaSNOścI aeRODyNaMIczNycH WIRNIka NOśNegO WIatRakOWca...
273
Rys. 5. Siła oporu wirnika (Drag) w funkcji prędkości lotu dla dwóch wartości skoku
ogólnego łopat wirnika i dla stałej siły nośnej wirnika
Rys. 6. Doskonałość aerodynamiczna wirnika (Lift/Drag) w funkcji prędkości lotu
dla dwóch wartości skoku ogólnego łopat wirnika i dla stałej siły nośnej wirnika
W ramach obliczeń wykonano również wizualizacje przepływu przez wirnik. Przykłady
przedstawiono na rysunkach 7 i 8.
3.2. Obliczenia wahań łopat wirnika
zmodyfikowany na potrzeby realizacji pracy moduł VbM pozwala również na określenie
kątów wahań łopat wirnika wywołanych zmiennością sił aerodynamicznych i uwzględnienie
efektów wahań w modelu obliczeniowym wirnika. Prędkość lotu poziomego powoduje, że łopaty
obracającego się wirnika pracują w zmiennych warunkach. W przypadku łopaty nacierającej
274
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
prędkość lotu dodaje się do prędkości stycznych profilu łopaty. Natomiast dla łopaty odchodzącej prędkości te się odejmują. Powoduje to powstanie różnych sił aerodynamicznych dla poszczególnych położeń kątowych łopaty i wywołuje jej okresowe wahania. zjawisko to narasta
wraz z prędkością lotu. Wahania i odkształcenia łopat powodują, że rzeczywisty kąt pomiędzy
kierunkiem lotu a płaszczyzną wirowania wirnika (zdefiniowaną przez obwiednię końcówki
obracającej się łopaty) różni się od geometrycznego kąta natarcia wirnika (ALFA) ustawianego
przez pilota.
Rys. 7. Mapy barwne obrazujące rozkład bezwzględnych prędkości przepływu w pobliżu wirnika
nośnego dla dwóch różnych prędkości lotu i dwóch kątów natarcia wirnika przy tej samej
wartości kąta skoku ogólnego łopaty i siły nośnej
Rys. 8. Mapa barwna przedstawiająca rozkład ciśnienia statycznego w wybranym przekroju
poprzecznym płaszczyzny wirnika nośnego
3.3 Obciążenia łopat wirnika od sił aerodynamicznych
Na podstawie wyników obliczeń modułu VbM określono obciążenia od sił aerodynamicznych na pojedynczej łopacie wirnika w punkcie mocowania łopaty. Schemat przyjętych oznaczeń przedstawiono na rysunku 10. Wyniki obliczeń umożliwiają ocenę obciążeń konstrukcji
wirnika, jakich można się spodziewać w trakcie eksploatacji budowanego wiatrakowca.
Na rysunkach 11-14 przedstawiono przykładowe przebiegi sił i momentów w punkcie mocowania łopaty wirnika dla trzech prędkości lotu wiatrakowca V = 125, 150, 180 km/h.
aNalIza OblIczeNIOWa WłaSNOścI aeRODyNaMIczNycH WIRNIka NOśNegO WIatRakOWca...
275
Rys. 9. Sekwencja rysunków obrazujących narastanie wahań łopat wirnika wraz ze zwiększaniem
prędkości lotu od 50 do 280 km/h przy zachowaniu stałej siły nośnej wirnika
Rys. 10. Schemat oznaczeń dla opisu sił i momentów aerodynamicznych w punkcie
mocowania łopaty wirnika
276
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
Rys. 11. Przebieg siły L w punkcie mocowania łopaty w funkcji kąta obrotu łopaty ψ
dla trzech prędkości lotu
Rys. 12. Przebieg momentu gnącego Mx w punkcie mocowanie łopaty w funkcji kąta
obrotu łopaty ψ dla trzech prędkości lotu
Rys. 13. Przebieg momentu skręcającego My w punkcie mocowanie łopaty w funkcji kąta
obrotu łopaty ψ dla trzech prędkości lotu
aNalIza OblIczeNIOWa WłaSNOścI aeRODyNaMIczNycH WIRNIka NOśNegO WIatRakOWca...
277
Rys. 14. Przebieg momentu Mz w punkcie mocowanie łopaty w funkcji kąta obrotu
łopaty ψ dla trzech prędkości lotu
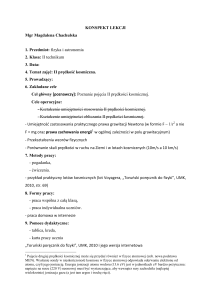
3.4 Analiza przepływu na łopatach wirnika
Oprócz obciążeń aerodynamicznych, za pomocą modułu VbM wyznaczone zostały także
lokalne charakterystyki przepływu wokół profili – przekrojów łopat wirnika dla wszystkich
rozważanych konfiguracji lotu wiatrakowca. analizując te charakterystyki można dokonać
jakościowej oceny przepływu na łopatach. W szczególności dotyczy to oceny
prawdopodobieństwa pojawienia się zjawisk aerodynamicznych niebezpiecznych dla wirnika
nośnego. Na rysunku 15 przedstawiono przykładowy przebieg zmian lokalnej liczby Macha
(M) oraz lokalnego współczynnika siły nośnej profilu (CL) w wybranych przekrojach
zewnętrznej części łopaty wirnika (R/RMAX > 0,5) dla pełnego obrotu łopaty (0 ≤ ψ ≤ 360 deg).
Na rysunku rozkłady te tworzą rodzinę pętli i zostały one porównane z dwiema obwiedniami
wyznaczonymi dla profilu Naca-9-H12-MOD [1] (na bazie którego zbudowana jest łopata
wirnika):
• Obwiednia MDD = MDD(CL) określająca wartość liczby Macha wzrostu oporu w funkcji
współczynnika siły nośnej. Przekroczenie tej obwiedni przez lokalne rozkłady M i CL na
łopacie wirnika sygnalizuje o możliwości pojawienia się silnych efektów transonicznych takich jak fale uderzeniowe i wzrost oporu. Obwiednię MDD = MDD(CL) wyznaczono dla profilu
Naca-9-H12-MOD na drodze obliczeniowej, za pomocą programu H [5].
• Obwiednia MBUF = MBUF(CL) określająca dla danej wartości współczynnika siły nośnej profilu
(CL) liczbę Macha początku buffetu. buffet jest zjawiskiem aerodynamicznym polegającym
na intensywnych pulsacjach ciśnienia wywołanych zazwyczaj przez silne, niestacjonarne
oderwania przepływu. konsekwencją pojawienia się buffetu w przepływie może być
buffeting – silne drgania struktury opływanego obiektu wywołane pulsacją ciśnienia.
Obwiednia MBUF = MBUF(CL) nie może być przekroczona, dla żadnych warunków lotu wiatrakowca ponieważ ewentualne wejście łopat wirnika w stan buffetingu zagrażałoby istotnie
bezpieczeństwu lotu. Wartości liczby Macha początku buffetu wyznaczono dla każdego profilu na drodze obliczeniowej, za pomocą programu H [5] oraz w oparciu o raport [2]. Oparto
się przy tym na przedstawionej w pracy [6] zależności pomiędzy pojawieniem się silnego
oderwania za falą uderzeniową i wartością maksymalnej lokalnej liczby Macha przed falą.
278
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
Rys. 15. Przykładowe rozkłady CL i M na zewnętrznej części łopat wirnika
z obwiednią liczby Macha początku buffetu dla prędkości lotu V = 150 km/h
4. WNIOSkI
zastosowana metoda obliczeniowa pozwoliła na stosunkowo szybkie wyznaczenie charakterystyk aerodynamicznych i obciążeniowych wirnika nośnego pracującego w stanie autorotacji. Obliczenia wykonano dla idealnie sztywnych łopat wirnika nie uwzględniając ich
ewentualnych odkształceń aeroelastycznych. W kolejnym kroku badań wskazane byłoby
przeprowadzenie analizy potencjalnych odkształceń łopat w trakcie lotu wiatrakowca oraz
oszacowanie wpływu tych odkształceń na osiągi i obciążenia wirnika. Na podstawie uzyskanych
wyników przedstawiono zalecenia i ograniczenia eksploatacyjne dla wirnika nośnego. Jednym
z bardziej interesujących zagadnień poddanych analizie był wpływ kąta skoku ogólnego łopat
na pracę i osiągi wirnika. Obecnie najczęściej przyjmowana wartość kąta skoku ogólnego łopaty
w wirnikach wiatrakowców to 4 stopnie. W pracy zbadano, w celach porównawczych, również
własności wirnika dla kąta skoku ogólnego równego 2 stopnie. Wirnik ze zmniejszonym kątem
skoku ogólnego wykazał pewne zalety takie jak: większa dopuszczalna prędkość lotu, mniejsze
obciążenia łopat, mniejsze kąty wahań łopat oraz większa prędkość obrotowa wirnika
(korzystna ze względu na bezpieczeństwo lotu).
bIblIOgRaFIa
[1] Stalewski W.: Definicja profilu łopaty wirnika nośnego dla nowego typu wiropłatowego
statku powietrznego, Raport nr R13003-01_bba2.
[2] grzegorczyk k., Żółtak J.: Obliczeniowe stacjonarne charakterystyki aerodynamiczne
profilu NACA-9-H-12-MOD(część 1), Raport nr R13003_ba2-010/10.
[3] FLUENT 6.1 User’s Guide, Fluent Inc., February 2003.
[4] Simpson b.: Virtual Blade Model, PDF Presentation.
[5] Bauer F., garabedian P., korn D., Jamenson a.: Supercritical Wing Section II, Springer-Verlag,
1975.
[6] Nixon D.: Transonic Aerodynamics. Progress in Astronautic and Aeronautics, 81, 1982.
aNalIza OblIczeNIOWa WłaSNOścI aeRODyNaMIczNycH WIRNIka NOśNegO WIatRakOWca...
279
WIeńczySłaW StaleWSkI, WIeSłaW zaleWSkI
COMPUTATiONAL ANALYSiS OF AERODYNAMiC
PERFORMANCE OF GYROPLANE MAiN ROTOR UNDER
CRUiSE FLiGHT CONDiTiONS (AUTOROTATiON)
Abstract
The paper presents the results of computer simulations of flight of gyroplane main rotor.
Considered flight conditions included the full range of flight speeds during a horizontal flight,
without taking into account the ground effect. Under such conditions, the freely rotating rotor
was moving continuously in the state of autorotation.
In the article there is shown the methodology of flight simulations as well as the examples
of computations and qualitative analyses of the flow around the main rotor of gyroplane.
The presented results of calculations include: aerodynamic characteristics, loads and angles
of flapping of rotor blades.