POLITECHNIKA WARSZAWSKA
Wydział Elektryczny
Autoreferat
ROZPRAWY DOKTORSKIEJ
mgr inż. Tadeusz Daszczyński
Pomiary i modelowanie charakterystyk obwodowych transformatorów
elektroenergetycznych dla potrzeb ich diagnostyki
Promotor
dr hab. inż. Włodzimierz Kałat
Warszawa, 2016
1. WSTĘP
Historia transformatorów rozpoczęła się w 1831 r. od doświadczenia M. Faraday’a,
który
zainspirowany
badaniami
H.
Ch.
Ørsteda
odkrył
zjawisko
indukcji
elektromagnetycznej. W swoim doświadczeniu zastosował dwie cewki nawinięte na żelazny
pierścień oraz baterię. Wyrażenie na odkryte prawo indukcji elektromagnetycznej zostało
wtedy opisane słownie, a w 1832 r. H. F. E. Lenz nadał mu analityczną formę. Pierwszy raz
słowa „transformator” użyto w opisach patentowych O. T. Bláty’ego, M. Déri’ego i K.
Zipernowsky’ego w 1885 r. i w artykule W. C. Rechniewskiego. W 1852 r. Anglik T. Allan
prawdopodobnie jako pierwszy zastosował i opatentował dwuuzwojeniowy induktor o
zamkniętym obwodzie magnetycznym. Pierwsze rdzenie transformatorów zbudowane były
zazwyczaj z izolowanych przewodów żelaznych typu rdzeniowego lub płaszczowego.
Pierwszą firmą produkującą na masową skalę transformatory była węgierska firma Ganz,
która do końca XIX w. wykonała ich ponad 10 tys. szt. różnej mocy i o różnych napięciach.
Pierwszy transformator został ukończony i przesłany do odbiorcy 16 września 1884 r. – było
to urządzenie typu płaszczowego o mocy 1400 W, napięciu 120/72 V, częstotliwości 40 Hz i
prądach 11,6/19,4 A. W 1887 r. zaczęto produkować rdzenie transformatorów z taśmy
stalowej, przy czym pierwsze blachy miały kształt litery E oraz litery H. Firma Ganz udzieliła
licencji firmie Oerlikon i Elektrische Beleuchtungscentral ze Szwajcarii, firmie Helios A. G. i
L. Schwartzkopf z Niemiec, firmie francuskiej Schneider-Creuzot [1].
Od czasu odkrycia indukcji elektromagnetycznej nastąpił gwałtowny wzrost
zainteresowania tym zjawiskiem oraz praktycznym jego wykorzystaniem. Można było już
generować energię elektryczną na niskim napięciu, transformować ją na wyższe napięcie i z
mniejszymi stratami przesyłać na znaczne odległości. W XIX w. pierwsze transformatory
budowano na moc ok. 5 kW (moc czynna). Około 1890 r. moce zwiększyły się do 100 kVA a
pod koniec XIX w. transformatory trójfazowe miały już ok. 600 kVA [1]. W 1891 r. na
wystawie we Frankfurcie nad Menem [2] Michał Doliwa-Dobrowolski pokazał pierwszą sieć
przesyłową trójfazową prądu przemiennego o napięciu 20 kV.
Dziś bardzo trudno byłoby sobie wyobrazić przesył energii elektrycznej, tak prądem
przemiennym jak i stałym, bez użycia transformatorów. Fakt ten powoduje, iż właśnie
transformatory stanowią rodzaj urządzeń elektrycznych najczęściej używanych w systemach
elektroenergetycznych. Rzutuje to bezpośrednio na ich niezawodność, która powinna być jak
najwyższa, ponieważ każda przerwa w dostawach energii elektrycznej do odbiorców
powoduje straty finansowe dla spółki dystrybucyjnej oraz utratę wiarygodności na rynku
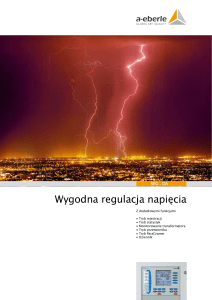
energii. W typowych systemach używa się 3 typów transformatorów (Rys. 1.1):
podwyższające, obniżające i dystrybucyjne (obniżające). Jak widać na rysunku 1.1 awaria
transformatora, niezależnie na którym etapie przesyłowym, stanowi poważny problem dla
dostawcy energii elektrycznej i może doprowadzić do przerw w jej dostawie.
Rys. 1.1. Schemat poglądowy typowej sieci elektroenergetycznej z 3 rodzajami transformatorów
Liberalizacja rynku energetycznego zapoczątkowana w Polsce przez Dyrektywę
2003/54/WE
[3]
pozwala
na
równe
traktowanie
czynników
ekonomicznych
z
niezawodnościowymi. Oznacza to iż Przedsiębiorstwo Energetyczne ma na celu dostarczenie
energii jak najrozsądniej ekonomicznie, z uwzględnieniem niezawodności i jakości energii.
Ustawa „Prawo energetyczne” Art. 4 [4] narzuca na Przedsiębiorstwa Energetyczne
obowiązek utrzymania zdolności urządzeń, instalacji i sieci do zaopatrywania odbiorców w
energię w sposób ciągły, niezawodny oraz przy spełnieniu wszystkich warunków
jakościowych. Warunki jakościowe są sprecyzowane w Rozporządzeniu Ministra Gospodarki
[5] i ściśle określają zakresy dla wszystkich grup przyłączeniowych parametrów takich jak
częstotliwość, napięcie znamionowe, wskaźnik migotania światła, asymetria napięcia, wyższe
harmoniczne napięcia, współczynnik THD. Określone zostały także najdłuższe możliwe
przerwy w dostawie energii elektrycznej. Efektem powyższych zmian i rozporządzeń jest
równoważenie
wyników
finansowych
Przedsiębiorstw
Energetycznych,
oczekiwań
udziałowców a także rozwoju i modernizacji istniejących systemów elektroenergetycznych
[6]. Skutkiem tego może być negatywny wpływ działań ekonomicznych na jakość i parametry
techniczne energii, szczególnie przy braku lub minimalnym wkładzie finansowym w
modernizację istniejącej infrastruktury. Zarządzanie zasobami majątkowymi Przedsiębiorstwa
Energetycznego w dużej mierze opiera się na procesach inżynierskich [7], których zadaniem
jest znalezienie odpowiedniej strategii ulepszania osiągów i czasu życia infrastruktury.
Oczywiście zarządzanie zasobami może być różnie rozumiane i interpretowane, jednak idee
pozostają te same:
Podejmowanie decyzji jest ściśle powiązane z ekonomią
Czynniki operacyjne wpływają strategie zasobów majątkowych
Obsługa poszczególnych zasobów przestaje być głównym celem
Głównym celem staje się optymalizacja wykorzystania infrastruktury
Środkiem do osiągnięcia zakładanych celów staje się obsługa i niezawodność.
Zarządzanie zasobami majątkowymi jest więc przedsięwzięciem biznesowym, które
służy uzyskaniu maksymalnego dochodu dla całości życia składnika majątkowego od
stwierdzenia konieczności zakupu do utylizacji, dla ściśle określonych granic bezpieczeństwa
i dyspozycyjności. O konieczności zakupu danego sprzętu decydują procesy modernizacyjne
lub wymogi rozbudowy sieci elektroenergetycznych. Jednym z podstawowych problemów
staje się więc określenie momentu uzasadnionej ekonomicznie wymiany i utylizacji sprzętu
bądź jego naprawy. Inżynierowie podczas procesu projektowania czy budowy urządzeń
powinni opierać się na przesłankach teorii niezawodności dotyczącej ryzyka uszkodzeń [8].
Charakterystyczny przebieg intensywności uszkodzeń w funkcji czasu został pokazany na
rysunku 1.2.
Rys. 1.2. Przebieg intensywności uszkodzeń w funkcji czasu [8]
Z rysunku 1.2 można odczytać charakterystyczne przedziały czasu trwałości wyrobu
technicznego:
Obszar I – charakterystyczne uszkodzenia „wieku dziecięcego” wynikające z wad
ukrytych, usterek montażowych, itp.
Obszar II – uszkodzenia przypadkowe związane z okresem normalnej eksploatacji
urządzenia
Obszar III – uszkodzenia wynikające ze zużycia i procesów starzeniowych wyrobu.
Całość działań inżynierskich skierowane jest do wydłużenia okresu II i wspomaganiu
podjęcia decyzji kiedy można w okresie III dany wyrób wymienić lub naprawić. Decyzja ta
pociąga za sobą pewne zobowiązania finansowe, a sens jej podjęcia może być uzasadniony
np. wynikami pomiarów diagnostycznych wyrobu podczas eksploatacji.
To samo dotyczy transformatorów, których czas życia szacowany jest na około 35-40
lat [9] – jest więc to inwestycja długoterminowa. Koszt transformatorów waha się w
zależności od mocy i typu transformatora [10, 11] (Tabela 1.1).
Tabela 1.1. Koszt zakupu transformatorów olejowych [I2, I3]
L.p. Moc transformatora [kVA]
Cena jednostkowa
[zł]
1
63
14 500,0
2
100
16 090,0
3
160
19 380,0
4
250
24 630,0
5
400
32 230,0
6
630
41 000,0
7
1000
75 398,4
8
10000
749 980,0
9
12000
1 270 500,0
Koszt zakupu nowego transformatora (Tabela 1.1), czas potrzebny na wymianę starej
jednostki na nową w celu zwiększenia niezawodności, jest często nieuzasadniony
ekonomicznie. William H. Bartley z Hatford Steam Boiler Inspection & Insurance Co. zbadał
całkowite koszty wynikające z uszkodzeń transformatorów w USA o mocach powyżej
25 MVA od 1997 r. do 2001 r. [12] (Tabela 1.2). Dane zostały zebrane dla 94 przypadków, w
których poszczególnych właścicieli urządzeń pytano o datę (rok) wystąpienia awarii, moc w
MVA transformatora, wiek transformatora w momencie wystąpienia awarii, zastosowanie
transformatora, przyczynę usterki, koszt uszkodzenia mienia, koszt przerwy biznesowej w
dostarczaniu energii elektrycznej. Mała liczba omawianych przypadków wynikała z
niemożności podania przez właścicieli wieku urządzeń lub nawet ich mocy. Autor wziął pod
uwagę dane z USA, ponieważ brakuje podobnych opracowań pochodzących z Polski.
Tabela 1.2. Liczba i koszty / w USD/ uszkodzeń transformatorów w latach 1997-2001 [12]
Rok
Liczba
Koszt całkowity
uszkodzeń zniszczenia własności
Koszt całkowity
przerwy biznesowej
Koszt całkowity
1997
19
25 036 673
15 742 834
40 779 507
1998
25
24 897 114
35 121
24 932 235
1999
15
36 994 202
397 389
37 391 591
2000
20
56 858 084
93 323 695
150 181 779
2001
15
19 453 016
13 890 684
33 343 700
SUMA
94
163 239 089
123 389 723
286 628 812
W Tabeli 1.3 przedstawiono główne przyczyny uszkodzeń transformatorów [12].
Wynika z niej, iż główną i najdroższą przyczyną wszystkich uszkodzeń są uszkodzenia
izolacji, wynikające z niewłaściwej lub wadliwej instalacji, pogorszenia właściwości izolacji i
zwarć, ale bez przepięć zewnętrznych.
Tabela 1.3. Przyczyny i koszty /w USD/ uszkodzeń transformatorów [12]
Przyczyna uszkodzenia transformatora
Liczba
Koszt całkowity
Uszkodzenia izolacji
24
149 967 277
Błędy projektowe/materiałowe/konstruktorskie
22
64 696 051
Nieznane
15
29 776 245
Zanieczyszczenie oleju
4
11 836 367
Przeciążenie
5
8 568 768
Pożar/eksplozja
3
8 045 771
Przepięcia
4
4 959 691
Niewłaściwa eksploatacja
5
3 518 783
Powódź
2
2 240 198
Obluzowanie połączeń
6
2 186 725
Wyładowanie piorunowe
3
657 935
Wilgoć
1
175 000
SUMA
94
286 628 811
Jak widać z powyższych tabel koszty uszkodzeń są znaczne, co narzuca konieczność
poprawnej i w miarę częstej diagnostyki transformatorów. Z uwagi na koszty (Tabela 1.3)
właśnie monitorowaniu i ocenie stanu izolacji poświęcono wiele badań.
Powstało wiele metod diagnostyki zarówno elektrycznych jak i chemicznych, które
różnią się czasem pomiaru, możliwością detekcji uszkodzeń, możliwościami pomiarowymi,
itp. W niniejszej pracy skupiono się na jednej szczególnej metodzie diagnostycznej
odpowiedzi częstotliwościowej FRA (ang. Frequency Response Analysis), której zasada
opiera się na wyjątkowości odpowiedzi częstotliwościowej transformatora zależącej
wyłącznie od parametrów urządzenia. Transformator podczas pomiaru metodą FRA jest
widziany jako tzw. „czarna skrzynka”, a więc interpretacja wyników stanowi główną istotę
ale i trudność tej metody. Modelowanie i symulacja mogą rozwiązać ten problem [13].
Główną tezą poniższej pracy jest:
Proponowanymi w rozprawie metodami można usystematyzować detekcję uszkodzeń
mechanicznych uzwojeń transformatorów przez:
Inne, niż do tej pory zakładano, uwzględnienie wpływu rdzenia na charakterystyki
częstotliwościowe transformatorów
Zastosowanie do identyfikacji uzupełnionej metody „vector fitting”
Wykorzystanie modelu fizycznego transformatora.
2. MODELOWANIE CHARAKTERYSTYK CZĘSTOTLIWOŚCIOWYCH
RDZENIA MAGNETYCZNEGO
Identyfikacja układów na podstawie charakterystyk częstotliwościowych polega na
stworzeniu opisu matematycznego danego obiektu. Modelowanie określa się jako wyrażenie
ilościowe (liczbowe) interesujących właściwości rzeczywistego lub projektowanego obiektu
w założonej postaci [14]. Projektowane obiekty mogą podlegać modelowaniu w celu np.
analizy i poprawnego ich zaprojektowania, a także dla sprawdzenia zachowania się obiektu w
różnych sytuacjach. Modelowanie rzeczywistych obiektów na podstawie pomiarów służy
głównie analizie ich zachowania oraz może być wykorzystane do szczególnych technik
związanych z diagnostyką i utrzymaniem obiektów. Jest to także skuteczna metoda określania
zjawisk fizycznych zachodzących podczas eksploatacji układów czy urządzeń. Jednym z
przykładów
praktycznego
zastosowania
takiego
modelowania
jest
modelowanie
transformatorów dla potrzeb metody diagnostycznej FRA. Jest to metoda porównawcza, w
której dokonuje się analizy odpowiedzi transformatora na podstawie jego tzw. „odcisku
palca”, tj. pomiaru wykonanego przed włączeniem urządzenia do eksploatacji lub na
jednostce bliźniaczej. Niestety, nadal nie stworzono wiarygodnego modelu transformatora w
szerokim spektrum częstotliwości. Wykazanie istotnego wpływu rdzenia magnetycznego
powoduje także konieczność uwzględnienia jego obecności w modelowaniu transformatorów.
Liniowe systemy o parametrach skupionych można modelować i identyfikować na podstawie
odpowiedzi
częstotliwościowych.
W
identyfikacji
częstotliwościowej
pomierzoną
charakterystykę h(jω) z reguły aproksymuje się funkcją wymierną [15]:
h( s )
a0 a1s a2 s 2 ... an s n
b0 b1s b2 s 2 ... bm s m
(2.1)
Powyższe równanie jest równaniem nieliniowym względem parametrów modelu. Próba
stworzenia z (2.1) równania liniowego postaci Ax = b przez pomnożenie obu stron przez
mianownik prowadzi do wielu błędów, wynikających ze złego uwarunkowania macierzy
metody najmniejszych kwadratów oraz obciążenia otrzymywanych estymat. Stanowi to
znaczne ograniczenie takiej aproksymacji dla funkcji wyższych rzędów.
2.1.
Wpływ rdzenia magnetycznego na charakterystyki częstotliwościowe
Wpływ rdzenia magnetycznego na charakterystyki częstotliwościowe jest zazwyczaj
pokazywany za pomocą funkcji przenikalności magnetycznej w szerokim spektrum
częstotliwości. Autorzy publikacji [16] Mitchell S.D., Welsh J.S pokazali, iż jest on widoczny
do częstotliwości 15 MHz, chociaż w publikacji brakuje wiarygodnego dowodu tej tezy.
Nadal jednak większość naukowców i badaczy uważa, iż powyżej 20 kHz w zasadzie rdzeń
nie odgrywa większej roli dla charakterystyk częstotliwościowych. Być może jest to także
związane z brakiem bezpośrednich wyników badań wpływu rdzenia magnetycznego. Zasadne
w takim razie wydawało się zbudowanie takiego układu pomiarowego, za pomocą którego
zjawisko to byłby jednoznacznie określone i pokazane całościowo.
2.1.
Układy pomiarowe
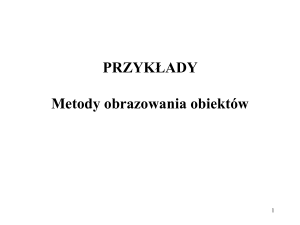
Pierwszy układ do pomiarów charakterystyk częstotliwościowych (Rys. 2.1)
zbudowany był z analizatora impedancji HP 4192A, cewki wzorcowej (użyto dwóch cewek
wzorcowych 5 mH i 10 mH), zdejmowanego rdzenia magnetycznego (z transformatora
25 VA), taśmy miedzianej do utrzymania tej samej pojemności doziemnej dla układu z
rdzeniem, jak i bez rdzenia.
Rys. 2.1. Układ pomiarowy nr 1: 1 – rdzeń magnetyczny, 2 – miedziana blacha, 3 – uzwojenia
cewki wzorcowej, 4 – kable pomiarowe, 5 – porcelanowa konstrukcja cewki wzorcowej
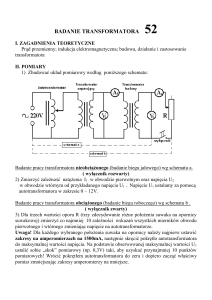
Analizator impedancji HP4196A mierzył charakterystykę częstotliwościową cewki
wzorcowej w zakresie 10 Hz – 5 MHz (2.2):
Z R
A 20 log 10
R
(2.2)
gdzie: Z – impedancja cewki wzorcowej, R – rezystancja bocznika pomiarowego.
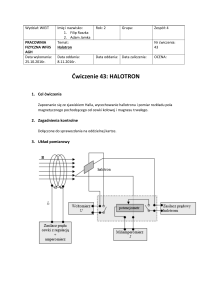
Drugi układ do pomiarów charakterystyk czasowych (Rys. 2.2) powszechnie nazywany
jest indykatorem TRV. Układ miał za zadanie mierzyć odpowiedź napięciową badanej cewki
wzorcowej na wymuszenie prądowe.
Rys. 2.2. Układ indykatora TRV: C – kondensator nastawczy, D – dioda, R – rezystor, Lr – cewka
wzorcowa, Ch1-Ch3 – sondy oscyloskopu PicoScope 5442B
Układ zbudowany był z elementów:
Generator funkcji – służył do wygenerowania połówki sinusoidalnego przebiegu prądu
Cewka wzorcowa – w tym przypadku użyto jedynie cewki 10 mH
Zdejmowalny rdzeń magnetyczny z transformatora 25 VA
Akumulatory o napięciu 12 V do ładowania kondensatora nastawczego C
Przełącznik do rozładowywania kondensatora nastawczego C.
Odpowiedź napięciową rejestrowano przy użyciu oscyloskopu PicoScope 5442B,
zakupionego z grantu dziekańskiego dla młodych naukowców.
2.2.
Wyniki pomiarów
Za pomocą układu nr 1 zmierzono charakterystyki częstotliwościowe dla dwóch cewek
wzorcowych 5 mH i 10 mH. Wyniki pomiarów w autoreferacie pokazano tylko dla cewki
wzorcowej 10 mH na rysunkach 2.3 i 2.4.
Impedancja cewki 10 mH [Ohm]
10
10
10
10
10
10
6
5
4
3
2
1
0
10 1
10
10
2
10
3
10
4
10
5
10
6
Częstotliwość [Hz]
Rys. 2.3. Impedancja cewki wzorcowej 10 mH: linia ciągła – bez rdzenia magnetycznego;
linia przerywana – z rdzeniem magnetycznym
Impedancja cewki 10 mH [Ohm]
10
10
10
10
10
5
4
3
2
1
10
5
10
6
Częstotliwość [Hz]
Rys. 2.4. Impedancja cewki wzorcowej 10 mH w zakresie 20 kHz – 1 MHz: linia ciągła – bez rdzenia
magnetycznego; linia przerywana – z rdzeniem magnetycznym
Za pomocą układu z indykatorem rejestrowano przebiegi wymuszenia prądowego
i odpowiedzi napięciowej cewki z rdzeniem i bez rdzenia. Zbadano cewkę wzorcową
o indukcyjności 10 mH, przyłączoną do układu zgodnie z rysunkiem 2.2. Zaobserwowane
przebiegi pokazano na rysunkach 2.5 i 2.6.
50
Prąd [jednostki wzgdlędne]
40
Pomiar cewki bez rdzenia
Pomiar cewki z rdzeniem
30
20
10
0
-10
-20
-30
-40
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Czas [ms]
Rys. 2.5. Przebiegi wymuszenia prądowego dla rejestracji układu cewki wzorcowej z rdzeniem
i bez rdzenia
20
Pomiar cewki bez rdzenia
Pomiar cewki z rdzeniem
Odpowiedź napięciowa
[jednostki względne]
15
10
5
0
-5
-10
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Czas [ms]
Rys. 2.6. Odpowiedź napięciowa cewki wzorcowej w układzie z rdzeniem i bez rdzenia
Zakres wpływu rdzenia magnetycznego na pomiar charakterystyk częstotliwościowych
zauważalny jest, szczególnie przy próbie z analizatorem impedancji, do około 300 kHz. Jest
to wartość częstotliwości, która jest wyższa od zakładanej i pokazanej we wcześniejszych
pracach Autora niniejszej rozprawy [17, 13] i znacznie wyższa od zakładanej przez
środowisko naukowe.
2.3.
Aproksymacja charakterystyki częstotliwościowej blachy
transformatorowej
Metodę
relokacji
biegunów
zastosowano
do
aproksymacji
charakterystyki
częstotliwościowej blachy transformatorowej. Do obliczeń przyjęto rząd dopasowania N = 8,
a więc także 8 biegunów startowych (Tabela 2.1). Aproksymacja została wykonana przy
użyciu programu Matlab oraz funkcji vectfit3.m udostępnianej przez autorów metody VF.
Tabela 2.1. Bieguny startowe do obliczeń aproksymacji metodą relokacji biegunów
L.p.
Wartość bieguna
startowego
1
-16
2
-42
3
-113
4
-303
5
-814
6
-2183
7
-5855
8
-15708
Zastosowanie metody relokacji biegunów okazuje się bardzo skuteczne [15], jednak
samo dopasowanie jest bardzo wrażliwe na dane początkowe. Linia ciągła na rysunku 3.25
przedstawia moduł zespolonej impedancji blachy z danych zmierzonych; linia przerywana
jest aproksymacją tej impedancji wykonaną metodą relokacji biegunów dla zadanych
warunków początkowych. Na rysunku 2.7 została pokazana także różnica wartości obu
przebiegów.
Moduł impedancji zespolonej blachy
600
Dane zmierzone
Aproksymacja metodą relokacji biegunów
Różnica
500
400
300
200
100
0
3
4
10
5
10
10
Częstotliwość [Hz]
Rys. 2.7. Moduł impedancji zespolonej w funkcji częstotliwości blachy transformatorowej
oraz jego aproksymacja metodą relokacji biegunów dla zadanych wartości początkowych
Z wyników widać skuteczne dopasowanie nowej funkcji do danych mierzonych w
pełnym zakresie częstotliwości. W rzeczywistości tak dobre wyniki otrzymano po wielu
próbach, podczas których testowano różne wartości początkowe biegunów oraz różne
poziomy dopasowania (N). Należy zwrócić uwagę, że do poprawnego dopasowania należy
najpierw zastosować metodę mogącą z dosyć dużą dokładnością znaleźć bieguny startowe,
które mogłyby być użyte w metodzie VF.
2.4.
Metoda vector fitting z biegunami startowymi Marti’ego
Metoda
VF
dla
aproksymacji
charakterystyk
częstotliwościowych
blach
transformatorowych wydaje się bardziej skuteczną i wiarygodną od omawianych metod.
Niestety, wymaga więcej uwagi od użytkownika, np. podczas wyboru biegunów startowych,
czy określenia rzędu aproksymacji. Metoda Marti’ego, mimo gorszej jakościowo
aproksymacji, dobrze odwzorowuje charakter funkcji aproksymowanej oraz wymaga mniej
uwagi użytkownika. Pomysł, który narzuca się po przestudiowaniu obu metod, jest taki, aby
połączyć je w jedną. Za pomocą metody Marti’ego można spróbować określić bieguny
startowe do metody VF.
W tym przypadku bieguny startowe należy wyliczyć korzystając z tabeli 2.1 zgodnie z
wzorem:
ak 2 f d (k )
(2.3)
gdzie: f – częstotliwość w punkcie d(k) końca części kroku metody Marti’ego o stałej wartośc;
k – numer punktu.
Obliczone bieguny startowe zostały pokazane w tabeli 2.3.
Tabela 2.3. Bieguny startowe obliczone z metody Marti’ego
L.p.
k
1
Wartość nowego bieguna
startowego ak
9,4248 10 3
2
1,9478 10 4
3
3,2673 10 4
4
4,7752 10 4
5
1,2566 10 5
6
5,0265 10 5
7
1,2566 10 6
8
5,0894 10 6
Na rysunku 2.8 pokazano nowe dopasowanie metodą VF z uwzględnieniem biegunów
startowych znalezionych przez metodę Marti’ego.
3
10
Moduł impedancji blachy
2
10
Funkcja aproksymowana
Aproksymacja metodą vector fitting
Odchylenie aproksymacji
1
10
0
10
-1
10
2
10
3
10
4
10
Częstotliwość [Hz]
5
10
Rys. 2.8. Aproksymacja modułu impedancji blachy metodą vector fitting z biegunami startowymi
wyliczonym z metody Marti’ego
Z rysunku 2.8 widać skuteczne dopasowanie ulepszoną metodą VF charakterystyki
częstotliwościowej blachy transformatorowej. Model, dla ułatwienia, można wyrazić za
pomocą parametrów modelu (2.4).
h(s) C sI A d se
1
(2.4)
Gdzie: A – macierz z obliczonymi biegunami; I – macierz jednostkowa; C – macierz z
obliczonymi zerami; d, e – wartości stałe.
W tabeli 2.4 podane zostały obliczone wartości do modelu blachy.
Tabela 2.4. Wyliczone macierze modelu blachy
L.p.
1
Macierz A o wym. 1x8
-0,6459·106
Macierz C o wym. 1x8
3,2386·107
2
-0,0606·106
0,7851·107
3
-0,0163·106
0,1036·107
4
0,0048·106
-0,0089·107
5
0,0306·106
-0,3373·107
6
7
0,1049·106
0,9224·106
-0,8816·107
-3,5733·107
8
8,0161·106
2,1761·107
Wartości współczynników d i e podano w (2.5).
d 11.9680
e -9.3090 10 -8
(2.5)
3. MODEL OBWODOWY TRANSFORMATORA
Na potrzeby eksperymentu został stworzony model obwodowy transformatora do
generowania charakterystyk częstotliwościowych w programie Matlab Simulink. Powstał
dlatego, że Autor niniejszej rozprawy nie uzyskał dostępu do wiarygodnych charakterystyk
częstotliwościowych transformatorów rzeczywistych. Takie dane w zasadzie tworzone są
jedynie dla dużych transformatorów i są traktowane przez spółki energetyczne jako niejawne.
Transformator można zamodelować pewnym układem sprzężonych ze sobą cewek
o odpowiedniej rezystancji i indukcyjności. Na rysunku 3.1 przedstawiono układ dwóch
sprzężonych ze sobą impedancji.
Rys. 3.1. Układ dwóch sprzężonych ze sobą impedancji
Na podstawie analizy obwodu magnetycznego można zbudować macierz impedancyjną
dwójników magnetycznych (Rys. 3.1) – wzór 3.1.
Γ IL
(3.1)
gdzie: ɸ – strumień indukcji pola magnetycznego, Γ – sprzężenie magnetyczne, IL – macierz
prądów poszczególnych gałęzi.
Napięcia na dwójniku można opisać wzorem (3.2).
U jΓ I L
(3.2)
Na podstawie powyższych zależności można skonstruować w programie Matlab
Simulink czwórnik zastępczy transformatora - rysunek 3.2. W modelu uwzględniono także
poszczególne pojemności międzyzwojowe (jako efekt całościowy) oraz pojemności doziemne
uzwojeń. Układ składał się ze źródeł prądu AC, odpowiednich układów równoległych RLC,
układu indukcyjności wzajemnej oraz układów pomiarowych napięcia. Do każdego zacisku
1 ÷ 3 przyłączono źródło prądu Iz1 ÷ Iz3.
Rys. 3.2. Model obwodowy transformatora do generowania charakterystyk częstotliwościowych:
Cij – pojemności międzyzaciskowe; L1, L2 – indukcyjności poszczególnych uzwojeń;
Rxo – rezystancje doziemne uzwojeń
Następnie dla poszczególnych zacisków modelu z rysunku 3.2 budowana jest macierz
pojemnościowa (3.3).
C12
C13
C1o C12 C13
YC
C12
C2o C12 C23
C23
C13
C23
C3o C23 C13
(3.3)
Kolejnym krokiem jest sformułowanie równania (3.4).
I z1 I l1
s YC E I z 2 I l 2
I z 3 I l 2
(3.4)
W równaniu czwórnika (3.4) zmiennymi stanu są napięcia węzłowe oraz nieznane prądy
magnesujące E1
E2
E3
I l1
Il 2 .
Korzystając z powyższych równań można napisać równanie czwórnika w ujęciu
macierzy blokowych (3.5).
1
0
s Y
(3x3)
0 0
1 1
E1 I z1
1 0
E
0 1
2 I z 2
E3 I z 3
0 1
s Z l
I l1 0
(2 x 2) I l 2 0
(3.5)
gdzie:
1 0
0 1
1 0 0
0 1
i 0 1 1 są macierzami przejścia z napięć węzłowych w napięcia
indukowane w dwójnikach magnetycznych
Zl to macierz impedancji (indukcyjności) dla czwórnika zastępczego transformatora
i budowana
jest
z
uwzględnieniem
obecności
rdzenia
magnetycznego
reprezentowanego przez jego względną przenikalność magnetyczną.
Implementacja modelu transformatora z rysunku 3.2 w programie Matlab Simulink
przedstawiona została na rysunku 3.3.
Rys. 3.3. Model Matlab Simulink transformatora
W tym przypadku transformator modelowany jest za pomocą czwórnika o określonych
parametrach, zadawanych przez użytkownika w części obliczeniowej skryptu Matlab. Dla
założonych
wartości
indukcyjności
i
pojemności
otrzymano
charakterystyki
częstotliwościowe, pokazane na rysunku 3.4.
10
Impedancja [Ohm]
10
10
10
10
10
5
4
przenikalność = 500
przenikalność = 250
3
2
1
0
-1
10 0
10
10
1
10
2
10
3
10
4
Częstotliwość [Hz]
10
5
10
6
Rys. 3.4. Charakterystyka częstotliwościowa modelu transformatora dla różnych wartości
przenikalności magnetycznej rdzenia
Model dla różnych wartości zadanych parametrów działa poprawnie, ponieważ
zachowane są wszystkie charakterystyczne cechy dotyczące zer i biegunów układu. Na jego
podstawie można skutecznie generować różne charakterystyki dla zadanych parametrów
obiektu.
4. MODEL FIZYCZNY TRANSFORMATORA
ELEKTROENERGETYCZNEGO
W związku z brakiem możliwości wykonania lub otrzymania pomiarów rzeczywistych
transformatorów, zainstalowanych w systemie elektroenergetycznym, podjęto próbę budowy
modelu fizycznego transformatora. Założenia modelu opierały się na wykorzystaniu
transformatora suchego typu TRIHAL o mocy 250 kVA i przekładni 15/0,4 kV (dane
znamionowe pokazano w tabeli 4.1). Rdzeń transformatora został rozpakietowany w celu
usunięcia uzwojeń wysokiego napięcia (które okazały się być po prostu atrapą – transformator
służył do celów pokazowych).
Tabela 4.1. Dane znamionowe transformatora
L.p.
Parametr znamionowy
Wartość
Jednostka
1
Moc znamionowa
250
kVA
2
Częstotliwość
50
Hz
3
Układ połączeń
DyN11
---
4
Napięcie zwarcia
6
%
5
Rok produkcji
1997
---
6
Liczba faz
3
---
7
Ciężar
1040
kg
Na rysunku 4.1 pokazano rozpakietowany transformator testowy. Rdzeń został
zdemontowany tylko w zakresie jarzma górnego. Dzięki temu było można z poszczególnych
kolumn zdjąć uzwojenia wysokiego napięcia i zamontować nowe uzwojenia dla celów badań.
Uzwojenia niskiego napięcia transformatora pozostawiono – są zbudowane z blachy
aluminiowej. Transformator po zainstalowaniu nowych uzwojeń testowych zostanie
ponownie złożony i obwód magnetyczny będzie zamknięty.
Rys. 4.1. Transformator testowy typu TRIHAL w trakcie rozpakietowywania rdzenia
4.1.
Badania cewek testowych bez rdzenia magnetycznego
W celu budowy modelu fizycznego wykonano cewki z taśmy miedzianej o szerokości
20 mm i grubości 1 mm. Każda cewka miała po 30 zwojów, a każdy zwój został zaizolowany
za pomocą taśmy izolacyjnej.
Pierwsza część badań, które zostały opisane w niniejszej rozprawie, zakłada wykonanie
pomiarów na uzwojeniach bez rdzenia magnetycznego. Schemat układu pomiarowego został
pokazany na rysunku 4.2, a jego fizyczna realizacja została pokazana na zdjęciu z rysunku
4.3. Zbudowany został stos pięciu cewek połączonych w szereg. Utrzymanie właściwego
ustawienia cewek realizowane było za pomocą różnych rodzajów przekładek: drewniane,
plastikowe i styropian. Wykorzystanie tych przekładek pokazuje, jak wrażliwy jest układ
pomiarowy na wszelkie możliwe występujące upływności. Jako bocznik zastosowano
rezystor wzorcowy o wartości rezystancji 75 Ω.
Plan badań zakładał wykonanie następujących pomiarów:
Układ symetryczny dwóch cewek
Układ z przesunięciem cewki górnej o 1 cm (dla stosu z dwóch cewek)
Układ z przesunięciem cewki górnej o 2 cm (dla stosu z dwóch cewek)
Układ symetryczny na trzech cewek
Układ symetryczny dla czterech cewek
Układ symetryczny dla pięciu cewek
Układ z przesunięciem cewki górnej o 1 cm (dla stosu z pięciu cewek)
Układ z przesunięciem cewki górnej o 2 cm (dla stosu z pięciu cewek)
Układ z przesunięciem skośnym cewki górnej (dla stosu z pięciu cewek)
Układ ze zwarciem cewki nr 2 (dla stosu z pięciu cewek)
Układ ze zwarciem cewki nr 2 i 3 (dla stosu z pięciu cewek)
Układ ze zwarciem cewki nr 2, 3 i 4 (dla stosu z pięciu cewek)
Rys. 4.2. Schemat układu pomiarowego cewek testowych z wykorzystaniem analizatora
impedancji HP4196A
Rys. 4.3. Fizyczna realizacja układu testowego bez rdzenia magnetycznego
4
10
Impedancja [Ohm]
3
10
przekładki drewniane
przekładki plastikowe
2
10
1
10
0
10 1
10
2
10
3
10
4
10
Częstotliwość [Hz]
5
10
6
10
7
10
Rys. 4.4. Pomiar modelu testowego uzwojeń dla różnych rodzajów przekładek między cewkami
Jak widać z rysunku 4.4 wpływ przekładek na pomiar jest znaczny. Wydaje się, że
spowodowane jest to zróżnicowaną upływnością obu rodzajów przekładek. Różnice widoczne
są zarówno w lokalizacji rezonansów, jak i ich wartości. Ostatecznie, jako przekładki
wykorzystano styropian, z uwagi na możliwości odpowiedniego i łatwego kształtowania
przekładek. Chodziło o takie ich zbudowanie, aby wszelkie zmiany ukształtowania
w ustawieniu cewek nie powodowały jednocześnie przesunięcia ekranu oraz o możliwość
symetrycznego ustawienia stosu.
Kolejne pomiary wykonano w układzie z dwiema cewkami połączonymi szeregowo.
Wyniki pomiarów pokazano na rysunkach 4.5 i 4.6.
Impedancja [Ohm]
10
10
Układ symetryczny
Przesunięcie cewki o 1cm
Przesunięcie cewki o 2cm
5
4
10
Częstotliwość [Hz]
6
Rys. 4.5. Fragment charakterystyki częstotliwościowej układu dwóch szeregowo połączonych cewek:
układ symetryczny, z przesunięciem jednej cewki o 1 cm i 2 cm
1.6
1.5
Iloraz pomiarów
1.4
Przesunięcie o 1 cm
Przesunięcie o 2 cm
1.3
1.2
1.1
1
0.9
0.8
0.7 1
10
10
2
10
3
10
4
10
5
10
6
10
7
Częstotliwość [Hz]
Rys. 4.6. Iloraz pomiarów dla układu dwóch szeregowo połączonych cewek: układ symetryczny,
z przesunięciem jednej cewki o 1 cm i 2 cm
Wyniki pokazują wpływ przesunięcia górnej cewki o 1 cm i 2 cm w poziomie. Na
rysunku 4.5 pokazany został jedynie wąski zakres okolicy ekstremum charakterystyki
częstotliwościowej dwóch szeregowo połączonych cewek. Wynika to z faktu niewielkich
różnic, widocznych praktycznie od 400 kHz do 1 MHz, co widać na rysunku 4.6. Przy
przesunięciu górnej cewki o 2 cm różnice widać już od częstotliwości 2 kHz (poniżej 5%).
Przy przesunięciu cewki o 2 cm można zaobserwować od około 1 kHz różnicę w pomiarach –
w tym przypadku około 0,3%. Wydaje się, iż może to być wynik zmiany reaktancji układu.
Po pomiarach testowych wykonano pomiary przesunięć i zwierania poszczególnych
cewek. Wyniki zostały przedstawione na rysunkach 4.7 i 4.8. Całość miała za zadanie
symulowanie uszkodzeń mechanicznych uzwojeń (przesunięcia) i zwarć w uzwojeniach.
Impedancja [Ohm]
10
10
10
Układ symetryczny
Przesunięcie o 1 cm
Przesunięcie o 2 cm
5
4
3
Częstotliwość [Hz]
10
6
Rys. 4.7. Fragment charakterystyki częstotliwościowej układu pięciu szeregowo połączonych cewek:
układ symetryczny, z przesunięciem jednej cewki o 1 cm i 2 cm
1.6
1.5
Przesunięcie o 1 cm
Przesunięcie o 2 cm
Iloraz pomiarów
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6 1
10
10
2
10
3
10
4
10
5
10
6
10
7
Częstotliwość [Hz]
4.8. Iloraz pomiarów układu symetrycznego i z przesunięciem cewki górnej o 1 cm i 2 cm
Jak widać z rysunków 4.7 i 4.8 przesunięcie poziome cewki górnej skutkuje zmianami
charakterystyki w zakresie częstotliwości powyżej 300 kHz, jednak nie zaobserwowano
przesunięcia rezonansów.
Następnie wykonano pomiary charakterystyk częstotliwościowych impedancji układu
z przesunięciem skośnym cewki górnej.
10
Impedancja [Ohm]
10
10
10
10
6
5
4
3
2
1
10 1
10
10
2
10
3
10
4
Częstotliwość [Hz]
10
5
10
6
10
7
Rys. 4.9. Charakterystyka częstotliwościowa układu pięciu szeregowo połączonych cewek:
układ symetryczny i z przesunięciem skośnym cewki górnej
7
6
Iloraz pomiarów
5
4
3
2
1
0 1
10
10
2
10
3
10
4
10
Częstotliwość [Hz]
5
10
6
10
7
Rys. 4.10. Iloraz pomiarów układu pięciu szeregowo połączonych cewek: układ symetryczny
i z przesunięciem skośnym cewki górnej
Faza [stopnie]
100
50
0
-50
-100 1
10
Układ symetryczny
Układ z przesunięciem
10
2
10
3
10
4
10
5
Częstotliwość [Hz]
10
6
10
7
Rys. 4.11. Faza charakterystyki częstotliwościowej układu pięciu szeregowo połączonych cewek:
układ symetryczny i z przesunięciem skośnym cewki górnej
Rysunki
4.9 ÷ 4.11
przedstawiają
rezultaty
pomiarów
charakterystyk
częstotliwościowych układu pięciu szeregowo połączonych cewek: układ symetryczny
i z przesunięciem skośnym cewki górnej. Różnice można odnotować już od częstotliwości
około 200 kHz. Dodatkowo można zaobserwować przesunięcia rezonansów oraz zanik
jednego dla układu ze skośną cewką, co jest także widoczne w fazie charakterystyki.
Następnie wykonano pomiary charakterystyk częstotliwościowych układu ze zwarciem
poszczególnych cewek – w autoreferacie zaprezentowano tylko wyniki pomiarów cewki nr 2.
6
10
Układ symetryczny
Zwarta cewka nr 2
Impedancja [Ohm]
5
10
4
10
3
10
2
10
1
10
2
10
3
10
4
10
Częstotliwość [Hz]
5
10
6
10
7
10
Rys. 4.12. Pomiar układu symetrycznego i układu ze zwartą cewką nr 2
30
Iloraz pomiarów
25
20
15
10
5
0 1
10
2
10
3
10
4
10
Częstotliwość [Hz]
5
10
6
10
7
10
Rys. 4.13. Iloraz pomiarów układu symetrycznego i układu ze zwartą cewką nr 2
Na podstawie powyższych pomiarów można spróbować wykonać analizę statystyczną,
co powinno doprowadzić do określenia sygnatury uszkodzenia. Analiza powinna także
zawierać oprócz punktów charakterystycznych także określenie rezonansów poszczególnych
pomiarów.
5. WNIOSKI I ZAKRES PRZYSZŁEJ PRACY
5.1.
Podsumowanie i wnioski
W rozprawie zaprezentowano rodzaj systematyki detekcji uszkodzeń mechanicznych
uzwojeń transformatorów elektroenergetycznych. Przedstawiony został podstawowy opis
Autor przedstawił podstawowe przyczyny i skutki uszkodzeń transformatorów wraz z
metodami detekcji poszczególnych uszkodzeń. Przy każdej metodzie omówiono także zakres
ich stosowania, zakres detekcji uszkodzeń oraz poziom jej złożoności.
Omówiono czynności związane z modelowaniem charakterystyk częstotliwościowych
rdzenia magnetycznego. Został zaprezentowany układ pomiarowy wraz z wynikami. Rozdział
został wzbogacony o przegląd pakietu MATLAB w zakresie analizy i identyfikacji modeli
częstotliwościowych. Model rdzenia transformatorowego zbudowano z wykorzystaniem
metody vector fitting i metody Marti’ego.
Zaprezentowano modele obwodowe transformatorów elektroenergetycznych oparte na
charakterystykach częstotliwościowych. Omówiono różne rodzaje modeli oraz pokazano
własny model obwodowy do generowania charakterystyk częstotliwościowych.
Autor poświęcił część pracy badaniu i pomiarom charakterystyk częstotliwościowych
funkcji obwodowych. Opisano metodę i technikę wykonania pomiaru oraz przedstawiono
programy LabView do sterowania procesem pomiarowym.
Teza została sformułowana w trzech podpunktach, z których każdy został
udowodniony.
Po pierwsze, dowiedziono wpływu rdzenia magnetycznego na charakterystyki
częstotliwościowe transformatorów do około 300 kHz. Dowód został przeprowadzony na
podstawie zarówno pomiarów częstotliwościowych jak i czasowych. Wniosek ten jest
uaktualnieniem wyników badań Autora wykonanych podczas pracy magisterskiej.
Po drugie, do aproksymacji charakterystyk częstotliwościowych i modelowania rdzenia
magnetycznego zastosowano metodę VF uzupełnioną o metodę Marti’ego. Metoda VF daje
bardzo dobre rezultaty dopasowania krzywych, jednak wymaga dosyć dokładnego podania
biegunów startowych aproksymacji. Uzupełnienie algorytmu metodą Marti’ego dla
modelowania rdzenia magnetycznego okazało się skuteczne i działało niejako automatycznie.
Uzupełnienie to sprawdza się dla modeli o niskim stopniu złożoności.
Po trzecie, podstawowym problemem identyfikacji uszkodzeń metodą FRA jest
niedokładne usystematyzowanie jakościowe i ilościowe zmian w pomiarze charakterystyk.
Problem ten można rozwiązać budując model fizyczny transformatora elektroenergetycznego.
W tym celu zbudowano 15 cewek z taśmy miedzianej i wykonano pomiary testowe układu.
Zostały także wykonane podstawowe pomiary odkształceń mechanicznych cewek dla układu
bez rdzenia magnetycznego. Wyniki potwierdzają tezę o zasadności budowy modelu.
Metoda indykatorowa (odpowiedzi czasowej), opisana w rozdziale 3 do określenia
wpływu rdzenia magnetycznego na pomiar charakterystyk częstotliwościowych, także wydaje
się mieć potencjał badania diagnostycznego. Badania nad tym układem będą kontynuowane.
5.2.
Plan dalszej pracy
Należy wykonać pomiary różnicowe na dwóch stosach cewek w układzie bez rdzenia
magnetycznego.
W
układzie
będą
symulowane
poszczególne
uszkodzenia
mechaniczne na każdym stosie – przesunięcia poziome i pionowe oraz zwarcia cewek.
Należy zainstalować zbudowane stosy cewek na transformatorze oraz zamknąć obwód
magnetyczny urządzenia. Należy także powtórzyć wszystkie pomiary wykonane
w układzie bez rdzenia magnetycznego oraz porównać je ze sobą. Pozwoli to na
kolejne potwierdzenie wpływu rdzenia na charakterystyki częstotliwościowe.
Wydaje się być zasadne zamodelowanie w programie MES (np. COMSOL lub
ANSYS, itp.) wykonanego modelu fizycznego transformatora. Wyniki można będzie
porównać z pomiarami.
Należy uprościć program sterujący procesem pomiarowym w LabView lub stworzyć
skrypt sterujący w programie Matlab. Program będzie wyszukiwał dokładnie
rezonanse i z dokładniejszym krokiem pomiarowym mierzył okolicę ekstremum.
Należy podjąć próbę budowy analizatora impedancji sterowanego poprzez udoskonalony
program w LabView lub w Matlab.
6. LITERATURA
[1]
M. Dąbrowski, „Początki rozwoju transformatorów”, OWN Poznań 2005
[2]
A.S. Carlsonn, Transforming history, ABB Review 2007 nr 3
[3]
Dyrektywa 2003/54/WE Parlamentu Europejskiego i Rady Unii Europejskiej w
sprawie wspólnych zasad dla wewnętrznego rynku energii elektrycznej
[4]
Ustawa z dnia 10 kwietnia 1997r. – Prawo energetyczne, tekst ujednolicony w
Biurze Prawnym URE na dzień 1 stycznia 2012r.
[5]
Rozporządzenie Ministra Gospodarki z dnia 4 maja 2007 r. w sprawie
szczegółowych warunków funkcjonowania systemu elektroenergetycznego (Dz. U. z 2007 r.,
Nr 93, poz.623, z późn. zm.)
[6]
T. Daszczyński, W. Chmielak, „Doświadczenia z prób i badań rozruchowych
instalacji elektrycznej obiektu typu Data Center”, Informacje o Normach i Przepisach
Elektrycznych, Polski, 1234-0081, pp. 18-27, październik
[7]
Gulski
E.,
J.
Smit
J.,
Maksymiuk
J.,
Zarządzanie
zasobami
sieci
elektroenergetycznych, Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2004,
Wydanie I
[8]
Maksymiuk J., Niezawodność maszyn i urządzeń elektrycznych, Oficyna
Wydawnicza Politechniki Warszawskiej, Warszawa 2003, Wydanie I
[9]
G.
Swift,
T.
Molinski,
„Power
Transformer
Life-Cost
Reduction”,
http://www.erlphase.com/
[10]
http://www.orten.com.pl
[11]
http://www.swgr.com
[12]
W. H. Bartley, “Analysis of Transformer Failures”, International Association of
Engineering Insuers, 36th Annual Conference – Stockholm 2003, IMIA – WGP 33 (03)
[13]
T. Daszczyński, “High Frequency Properties of Steel Laminations fo Power
Transformers”, praca magisterska zarejestrowana w Chalmers University of Technology nr
92/2007, ISSN 1652-8913
[14]
K. Mańczak, Z. Nahorski, “Komputerowa identyfikacja obiektów dynamicznych”,
PWN, Wydanie I, Warszawa 1983
[15]
T. Daszczyński, Z. Pochanke, „Aproksymacja charakterystyk częstotliwościowych
blach transformatorowych”, Przegląd Elektrotechniczny, 12a, ISSN 0033-2097, pp. 0-0,
Grudzień, 12a'2012
[16]
Mitchell S.D., Welsh J.S., “Permeability and its Influence on the Broadband
Frequency Response of Power Transformer”, Power and Energy Engineering Conference,
2009. APPEEC 2009. Asia-Pacific, On page(s): 1 – 4
[17]
Tadeusz Daszczyński, K. G. Nilanga B. Abeywickrama, Yuriy V. Serdyuk,
Stanislaw M. Gubanski, "Determination of complex permeability of silicon steel for use in
high-frequency
modeling
of
power
transformers",
IEEE
MAGNETICS, 44, ISSN 0018-9464, pp. 438 - 444, Kwiecień 2008
TRANSACTIONS
ON